
Interactive Fluid Coupling Effects of Non-Neighbouring Members


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. General Formulation of the Array Model
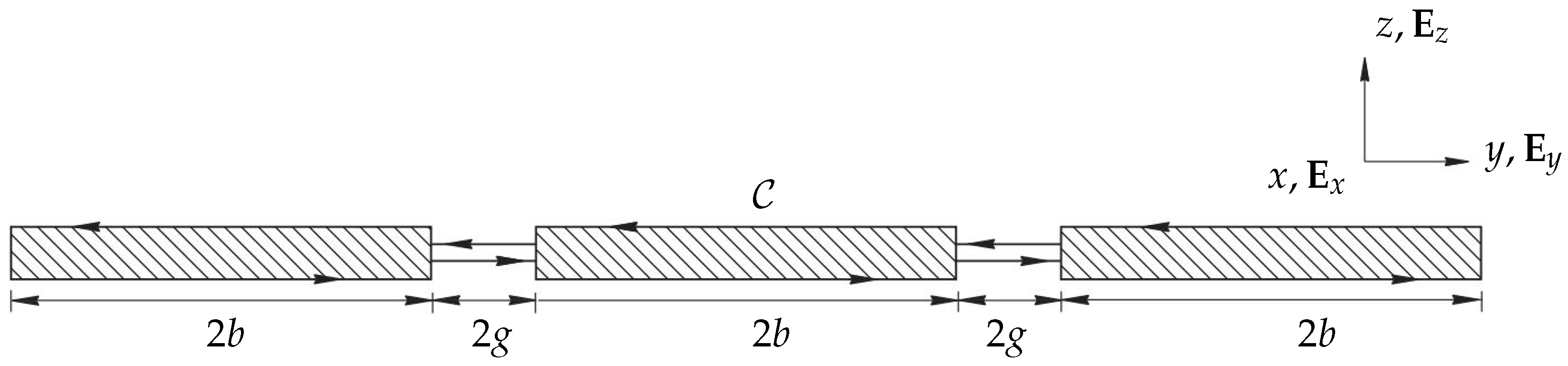
2.1. Model Description
- (1)
- Each beam has a rectangular cross section that remains uniform along its length.
- (2)
- The fluid motion along the axial direction can be neglected for lower flexural modes.
- (3)
- Only transverse vibrations of the beam along are considered and any lateral motion along is ignored.
- (4)
- Only hydrodynamic coupling effects are considered, ignoring any effects arising from structural coupling.
- (5)
- The fluid is incompressible as the acoustic wavelength in both liquids and gases typically exceeds the characteristic length scale of the beam.
- (6)
- Only one beam in the array is considered to be actuated while the rest of the beams are passive in order to study the inter-member coupling effects.
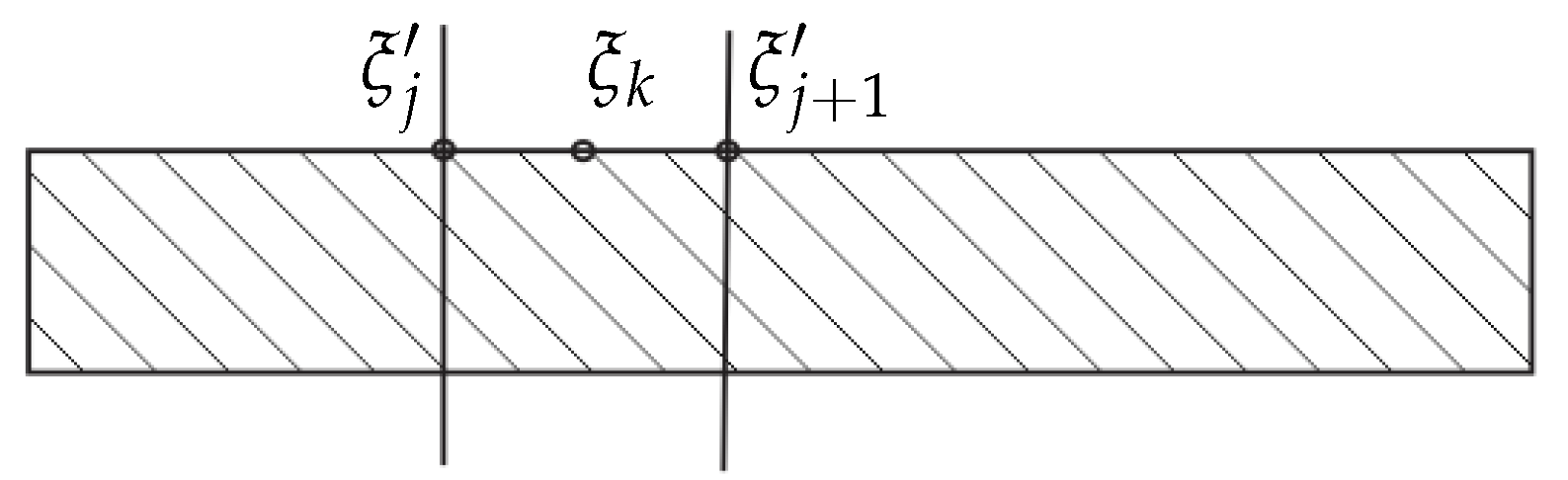
2.2. Streamfunction Formulation
2.3. Hydrodynamic Coupling in Arrays
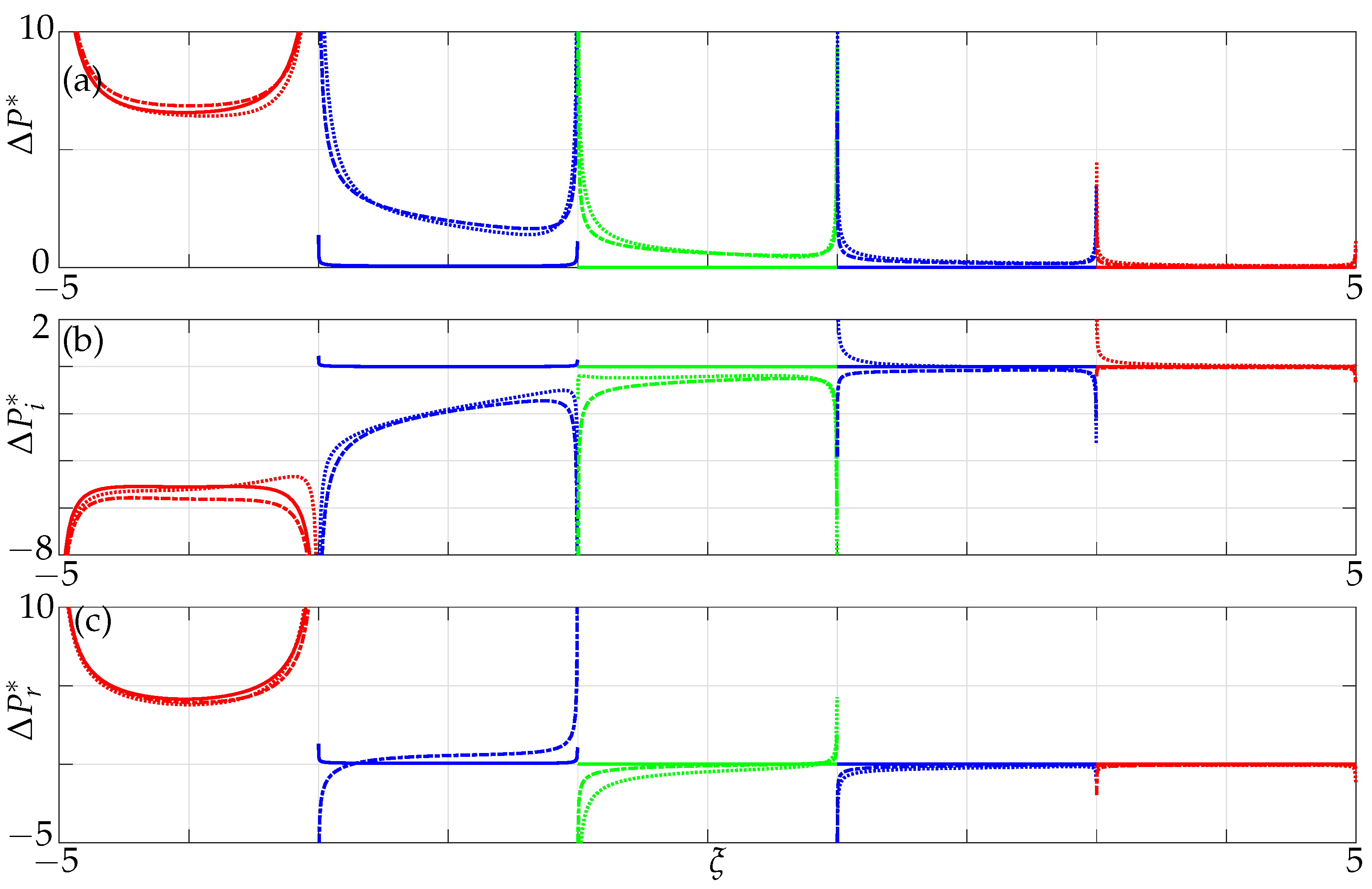
3. Hydrodynamic Loading
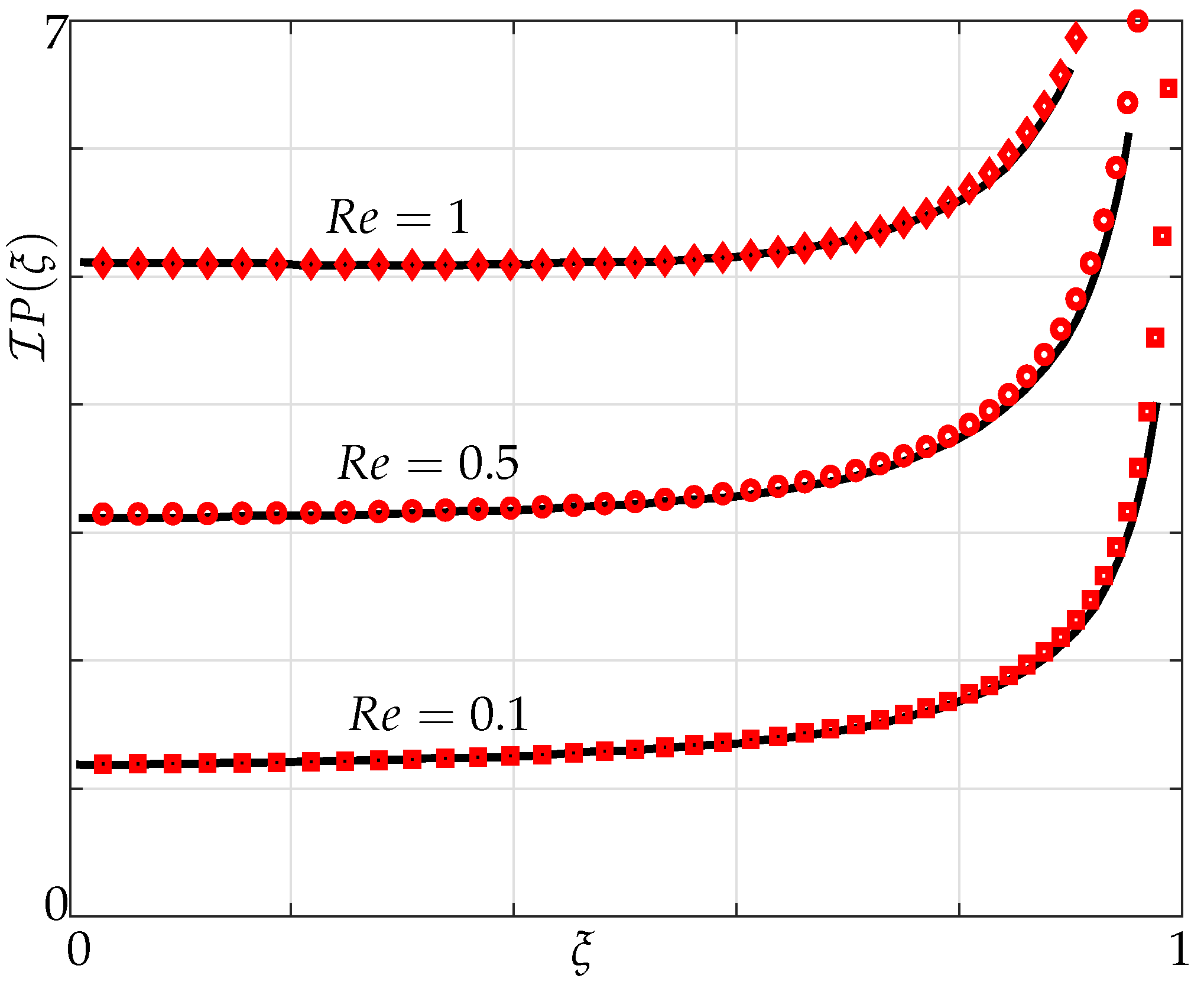
3.1. Validation
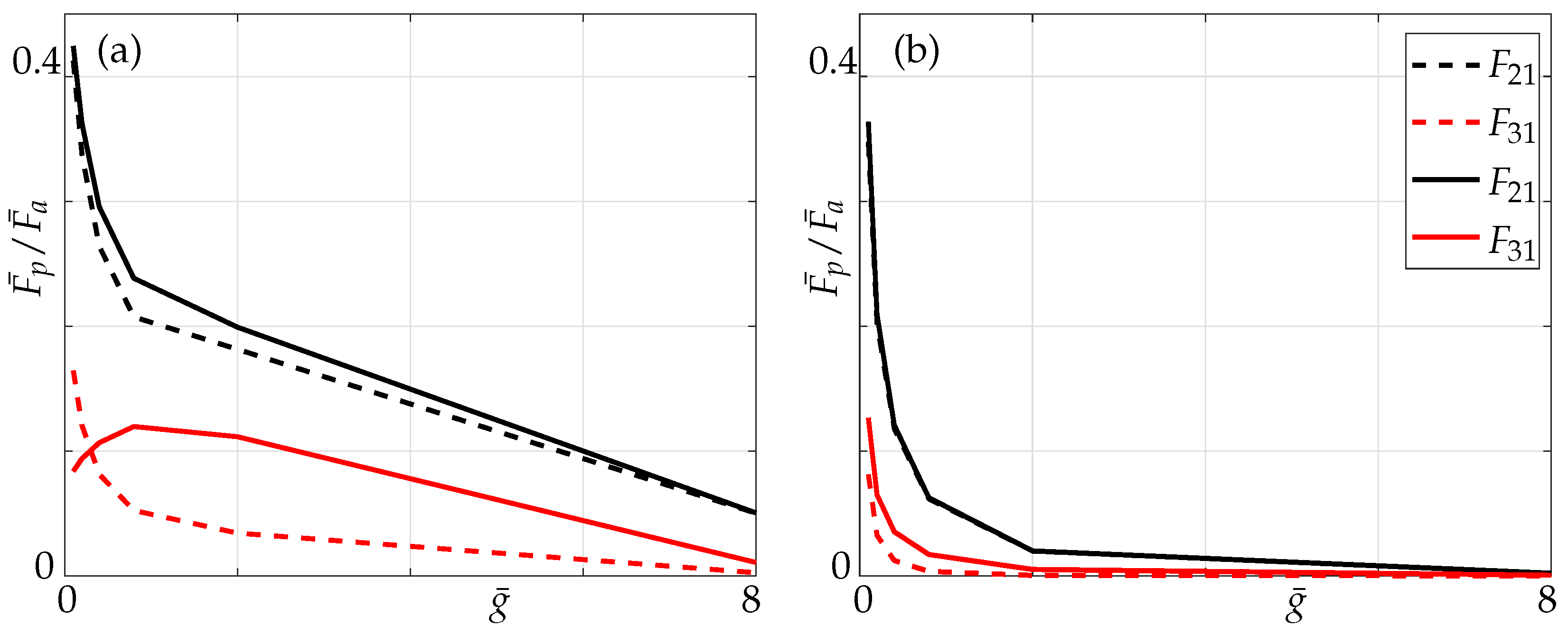
3.2. Hydrodynamic Coupling of a Pair of Beams
4. Results
4.1. Three Beam Array
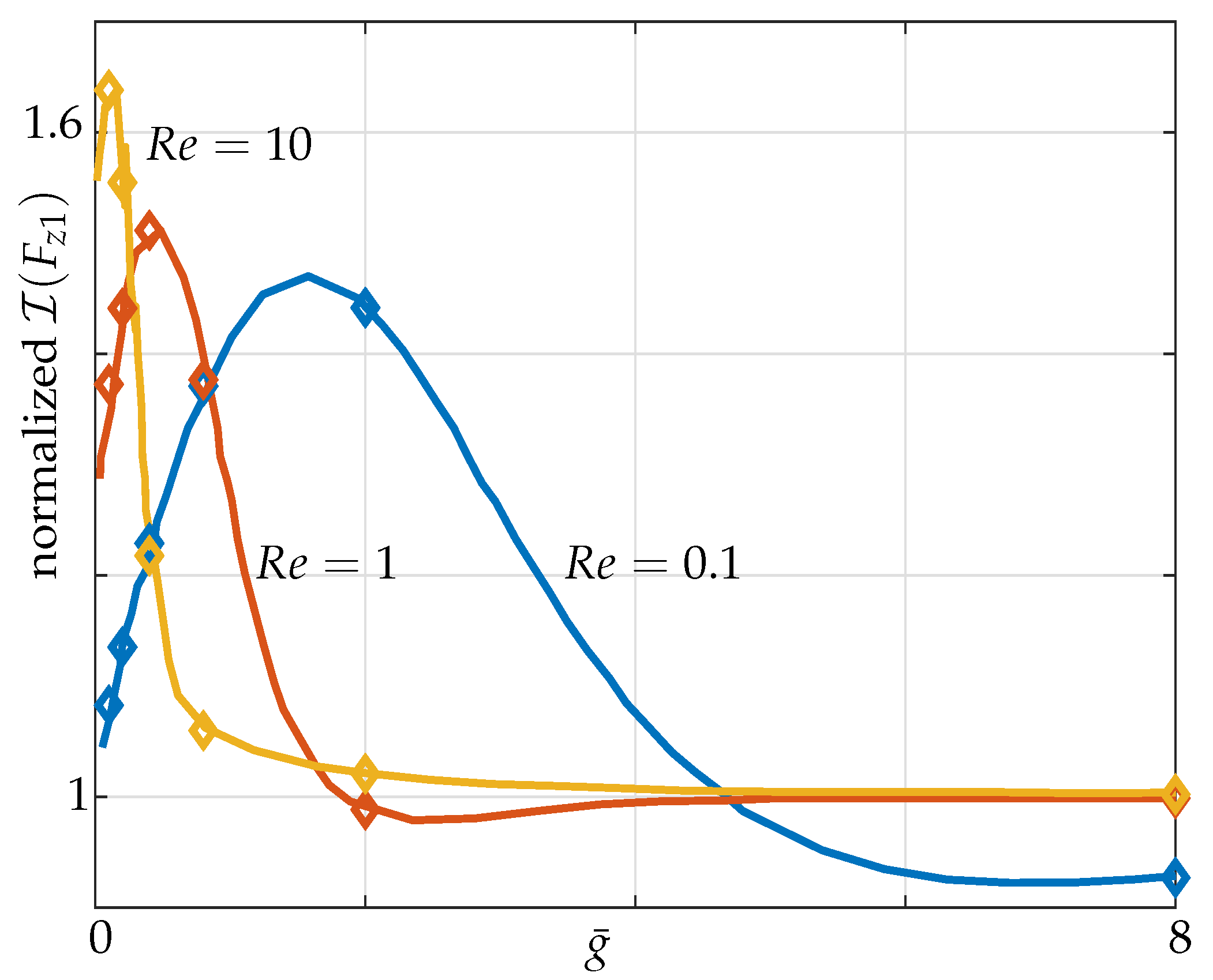
4.1.1. Effect of the Gap
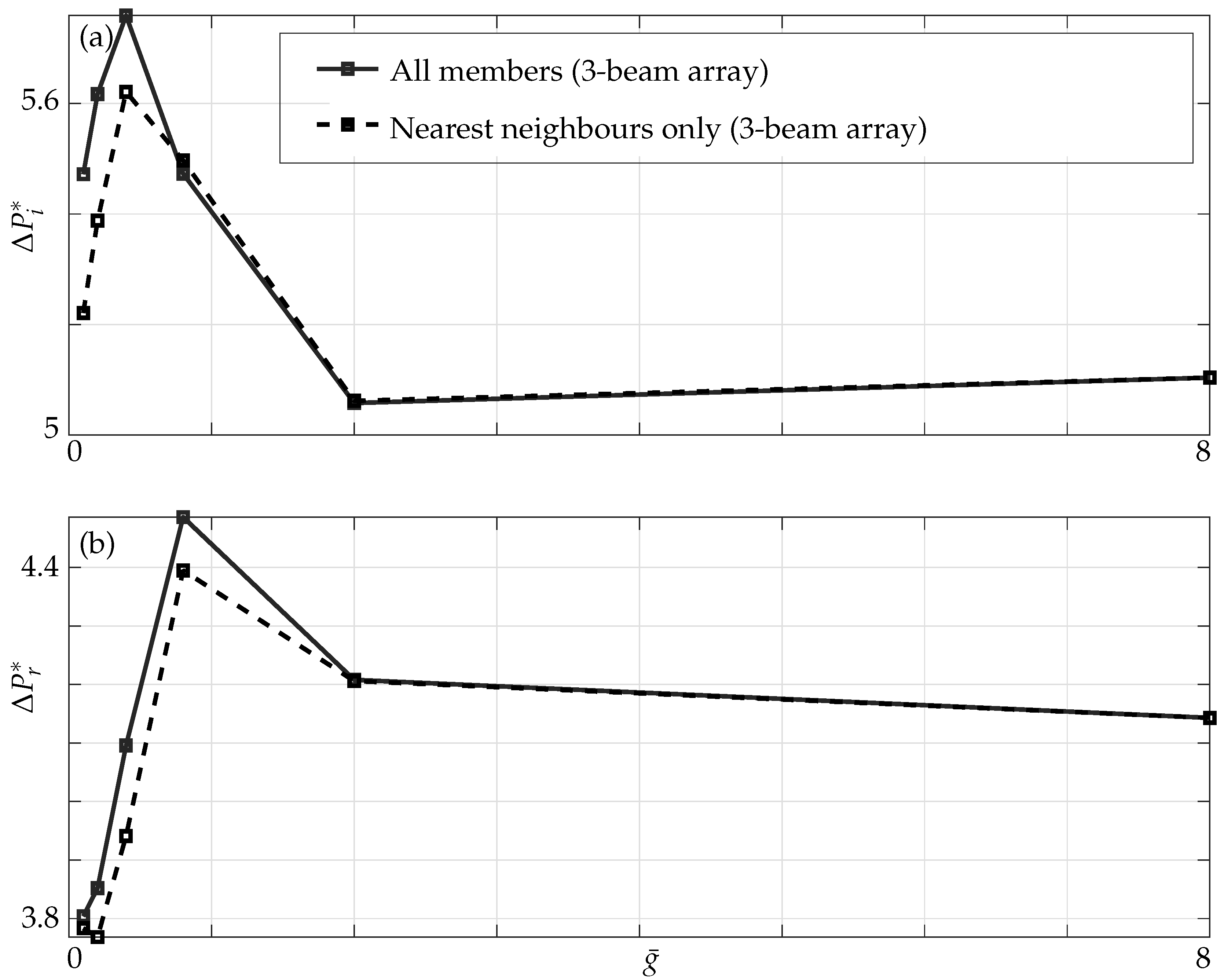
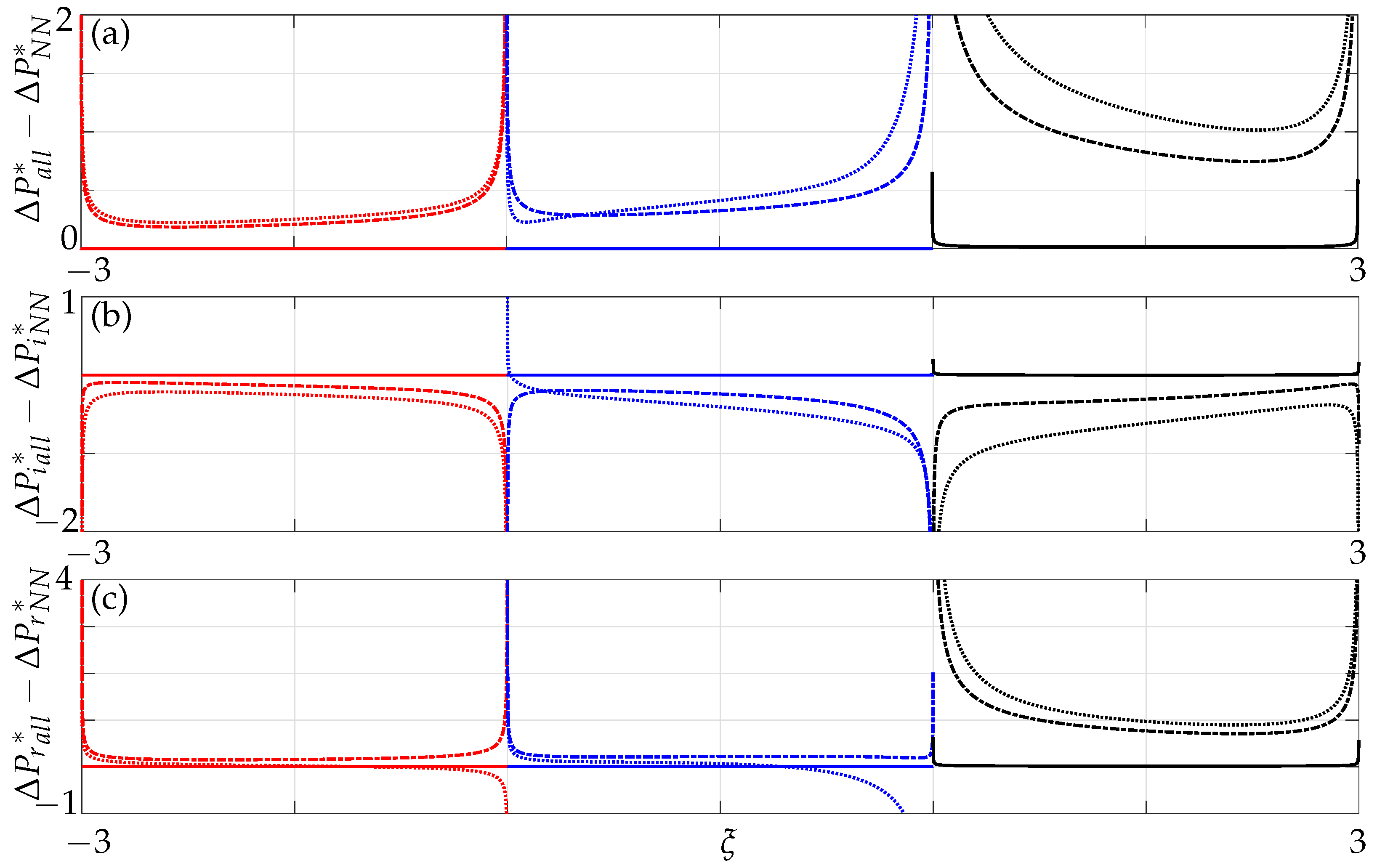
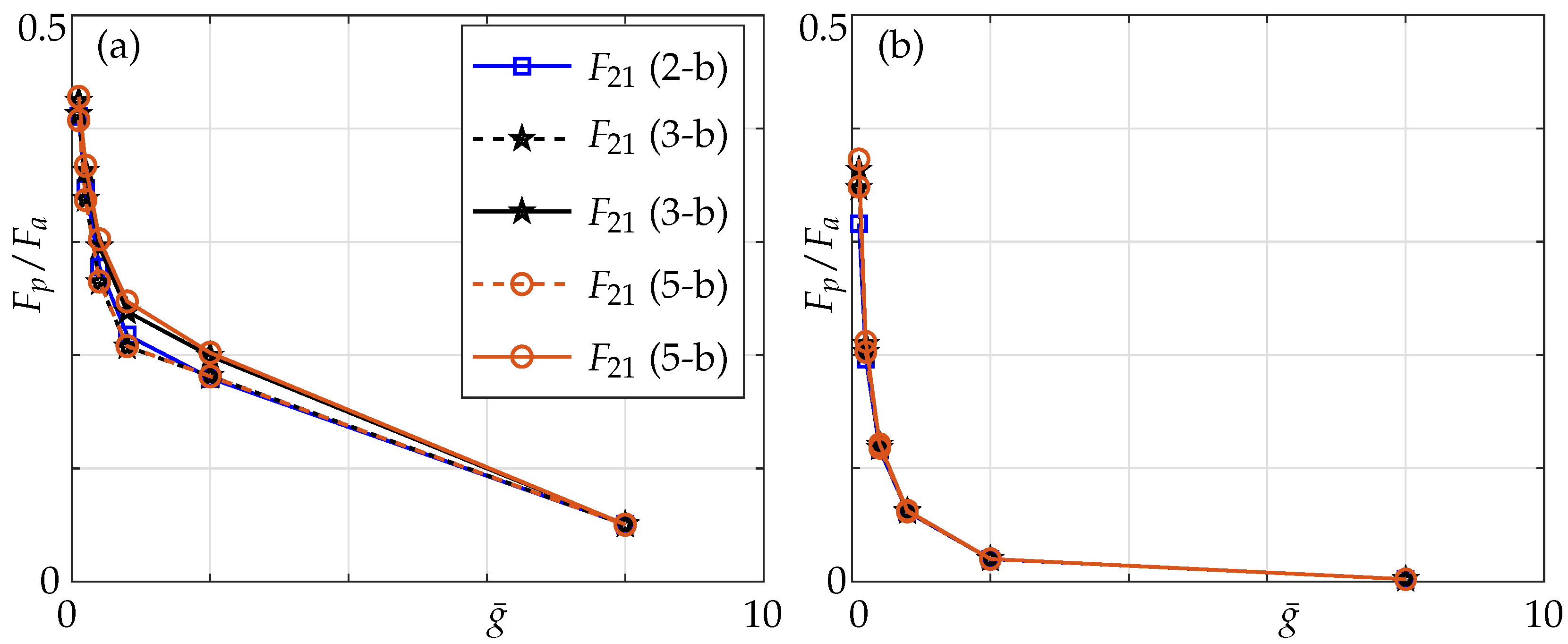
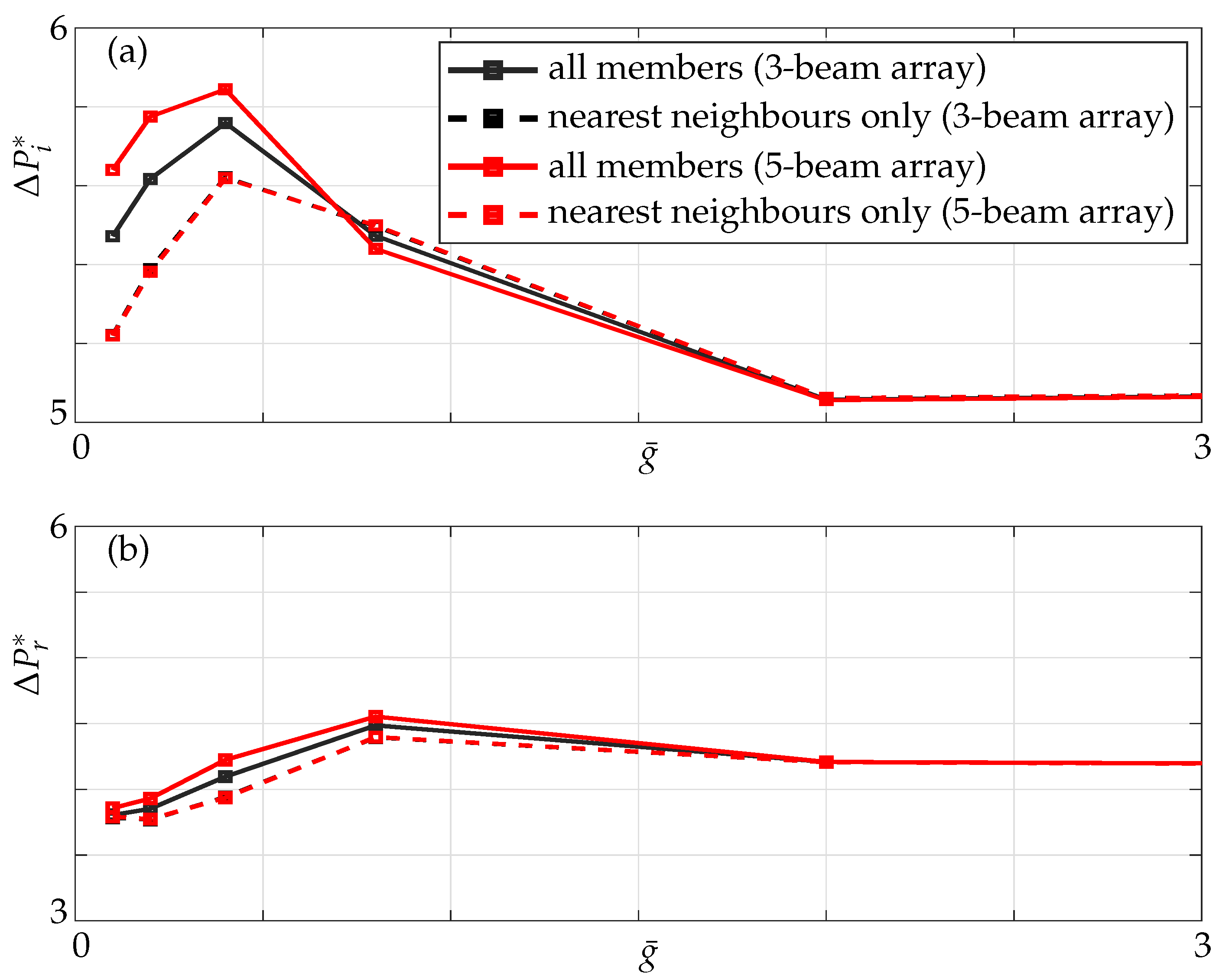
4.1.2. Effect of the Non-Neighbouring Members
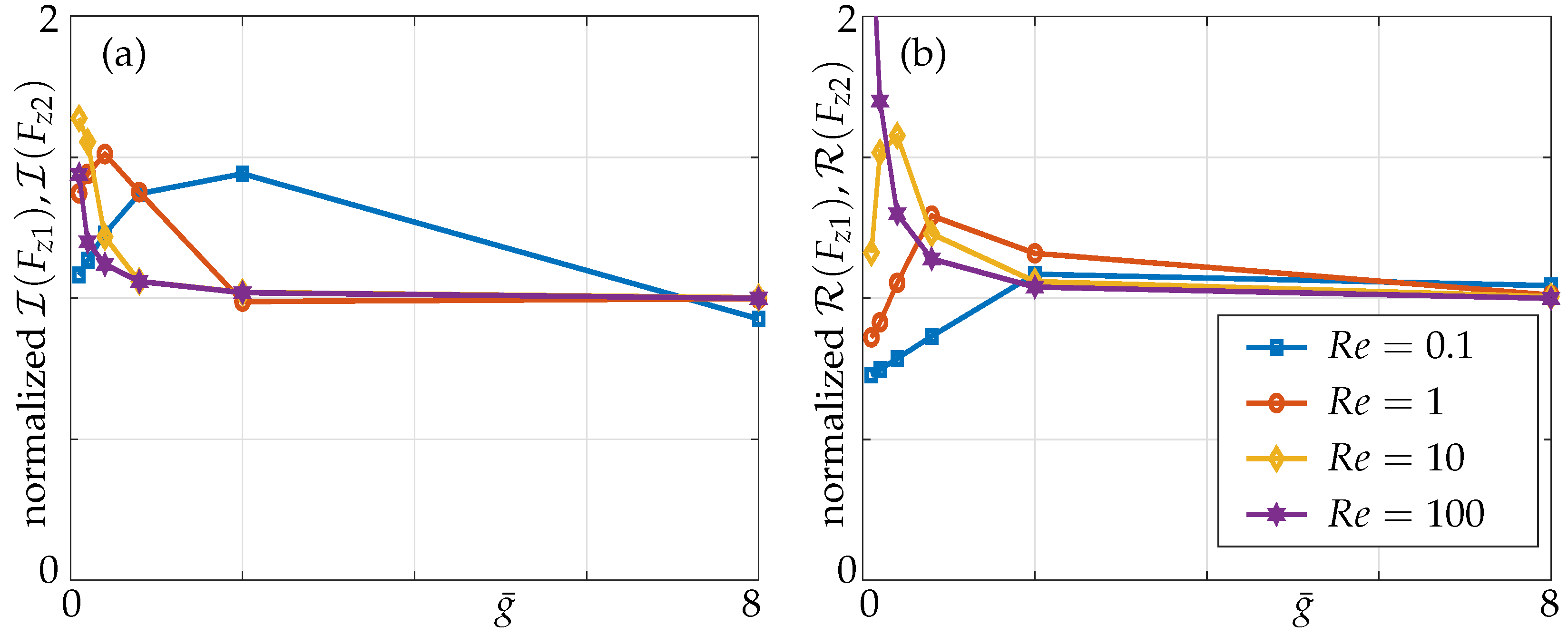
4.1.3. Effect of the Reynolds Numbers
4.2. Five Beam Array
4.2.1. Effect of the Gap
4.2.2. Effect of the Non-Neighbouring Members
4.2.3. Effect of the Reynolds Numbers
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MEMS | Micro Electro Mechanical Systems |
| IPMCs | Ionic Polymer Metal Composites |
| AFM | Atomic Force Microscope |
References
- Sundström, E.T.; Tomac, M.N. Synchronization and Flow Characteristics of the Opposing Facing Oscillator Pair in Back-to-Back Configuration. In Flow, Turbulence and Combustion; Springer Nature: Cham, Switzerland, 2019; Volume 6, pp. 71–87. [Google Scholar]
- Forrester, D.M. Arrays of coupled chemical oscillators. Nat. Sci. Rep. 2015, 5, 16994. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rangelow, I.W.; Ivanov, T.; Ahmad, A.; Kaestner, M.; Lenk, C.; Bozchalooi, I.S.; Xia, F.; Youcef-Toumi, K.; Holz, M.; Reum, A. Review Article: Active scanning probes: A versatile toolkit for fast imaging and emerging nanofabrication. J. Vac. Sci. Technol. 2017, 35, 06G101. [Google Scholar] [CrossRef]
- Hobeck, J.; Inman, D. A distributed parameter electromechanical and statistical model for energy harvesting from turbulence-induced vibration. Smart Mater. Struct. 2014, 23, 115003. [Google Scholar] [CrossRef]
- Hobeck, J.; Inman, D. Artificial piezoelectric grass for energy harvesting from turbulence-induced vibration. Smart Mater. Struct. 2012, 21, 105024. [Google Scholar] [CrossRef] [Green Version]
- Hobeck, J.; Inman, D. Dual cantilever flutter: Experimentally validated lumped parameter modeling and numerical characterization. J. Fluids Struct. 2016, 61, 324–338. [Google Scholar] [CrossRef]
- Wang, J.; Nabawy, M.R.; Cioncolini, A.; Revell, A.; Weigert, S. Planform Geometry and Excitation Effects of PVDF-Based Vibration Energy Harvesters. Energies 2021, 14, 211. [Google Scholar] [CrossRef]
- Moghadassian, B.; Sharma, A. Designing wind turbine rotor blades to enhance energy capture in turbine arrays. J. Renew. Energy 2019, 148, 651–664. [Google Scholar] [CrossRef] [Green Version]
- Sogut, E.; Sogut, D.V.; Farhadzadeh, A. Effects of building arrangement on flow and pressure fields generated by a solitary wave interacting with developed coasts. In Advances in Water Resources; Elsevier: Amsterdam, The Netherlands, 2019; Volume 134. [Google Scholar]
- Jeong, K.H.; Yoo, G.H.; Lee, S.C. Hydroelastic vibration of two identical rectangular plates. J. Sound Vib. 2004, 272, 539–555. [Google Scholar] [CrossRef]
- Kimber, M.; Lonergan, R.; Garimella, S. Experimental study of aerodynamic damping in arrays of vibrating cantilevers. J. Fluid Struct. 2009, 25, 1334–1347. [Google Scholar] [CrossRef] [Green Version]
- Intartaglia, C.; Soria, L.; Porfiri, M. Hydrodynamic coupling of two sharp-edged beams vibrating in a viscous fluid. Proc. Roy. Soc. 2013, 470, 20130397. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cellini, F.; Intartaglia, C.; Soria, L.; Porfiri, M. Effect of hydrodynamic interaction on energy harvesting in arrays of ionic polymer metal composites vibrating in a viscous fluid. Smart Mater. Struct. 2014, 23, 045015. [Google Scholar] [CrossRef]
- Hosaka, H.; Itao, K. Coupled Vibration of Microcantilever Array Induced by Airflow Force. J. Vib. Acoust. 2002, 124, 26–32. [Google Scholar] [CrossRef]
- Clark, M.; Paul, M. The stochastic dynamics of an array of atomic force microscopes in a viscous fluid. Int. J. Nonlin Mech. 2006, 42, 690–696. [Google Scholar] [CrossRef] [Green Version]
- Basak, S.; Raman, A. Hydrodynamic coupling between micromechanical beams oscillating in viscous fluids. Phys. Fluids 2007, 19, 017105. [Google Scholar] [CrossRef] [Green Version]
- Ghatkesar, M.; Braun, T.; Barwich, V.; Ramseyer, J.P.; Gerber, C.; Hegner, M.; Lang, H.P. Resonating modes of vibrating microcantilevers in liquid. Appl. Phys. Lett. 2008, 92, 10–13. [Google Scholar] [CrossRef] [Green Version]
- Van Eysden, C.A.; Sader, J.E. Frequency response of cantilever beams immersed in compressible fluids with applications to the atomic force microscope. J. Appl. Phys. 2009, 106, 094904. [Google Scholar] [CrossRef]
- Jackson, S. Modelling and Control of Coupled AFM Arrays for Parallel Imaging Verified through a Macro Scale Experiment. Ph.D. Thesis, University of Canterbury, Christchurch, New Zealand, 2017. [Google Scholar]
- Tuck, E.O. Calculation of Unsteady Flows Due to Small Motions of Cylinders in Viscous Fluid. J. Eng. Math. 1969, 3, 29–44. [Google Scholar] [CrossRef]
- Pozrikidis, C. Boundary Integral and Singularity Methods for Linearized Viscous Flow; Cambridge University Press: New York, NY, USA, 1992. [Google Scholar]
- Davis, P.J.; Rabinowitz, P. Methods of Numerical Integration; Academic Press: San Diego, CA, USA, 1984. [Google Scholar]
- Tung, R.C.; Jana, A.; Raman, A. Hydrodynamic loading of microcantilevers oscillating near rigid walls. J. Appl. Phys. 2008, 104. [Google Scholar] [CrossRef] [Green Version]
- Manickavasagam, A.K.; Gutschmidt, S.; Sellier, M. Hydrodynamic loading profiles of viscously-interacting blocks subject to different stimulus locations. J. R. Soc. N. Z. 2021, 51, 346–360. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manickavasagam, A.K.; Gutschmidt, S.; Sellier, M. Interactive Fluid Coupling Effects of Non-Neighbouring Members. Sensors 2021, 21, 6961. https://doi.org/10.3390/s21216961
Manickavasagam AK, Gutschmidt S, Sellier M. Interactive Fluid Coupling Effects of Non-Neighbouring Members. Sensors. 2021; 21(21):6961. https://doi.org/10.3390/s21216961
Chicago/Turabian StyleManickavasagam, Arun Kumar, Stefanie Gutschmidt, and Mathieu Sellier. 2021. "Interactive Fluid Coupling Effects of Non-Neighbouring Members" Sensors 21, no. 21: 6961. https://doi.org/10.3390/s21216961
APA StyleManickavasagam, A. K., Gutschmidt, S., & Sellier, M. (2021). Interactive Fluid Coupling Effects of Non-Neighbouring Members. Sensors, 21(21), 6961. https://doi.org/10.3390/s21216961