
Indoor Carrier Phase Positioning Technology Based on OFDM System


Abstract
:1. Introduction
2. Ranging System
2.1. Conventional Cross-Correlation TOA Estimator
- (known) is the TOA measurement from terminal r to BS i (unit:s).
- c is the speed of radio waves in vacuum, 299,792,458 (unit: m/s).
- (unknown) is the geometric distance between the antennas of transmitter i and receiver r (unit: m).
- (known) is the two-dimensional vector giving the coordinates of BS i.
- (unknown) is the location of the terminal to be solved.
- (unknown) is a random Gaussian variable accounting for the residual estimation error (unit: m).
2.2. High-Precision TOA Estimation Scheme Based on Carrier Phase
- (known) is the carrier phase measurement (unit: carrier circle).
- (known) is the wavelength calculated from c, , N, and , (unit: m).
- (unknown) is the integer ambiguity (unit: carrier circle).
- (unknown) is the residual estimation error (unit: carrier circle).
3. Positioning Algorithm
3.1. TOA and Carrier Phase Measurements
- (unknown) is the clock error of the transmitter i (unit: s).
- (unknown) is the clock error of the receiver r (unit: s).
- (unknown) represents the channel bias introduced by NLOS reflections (unit: m).
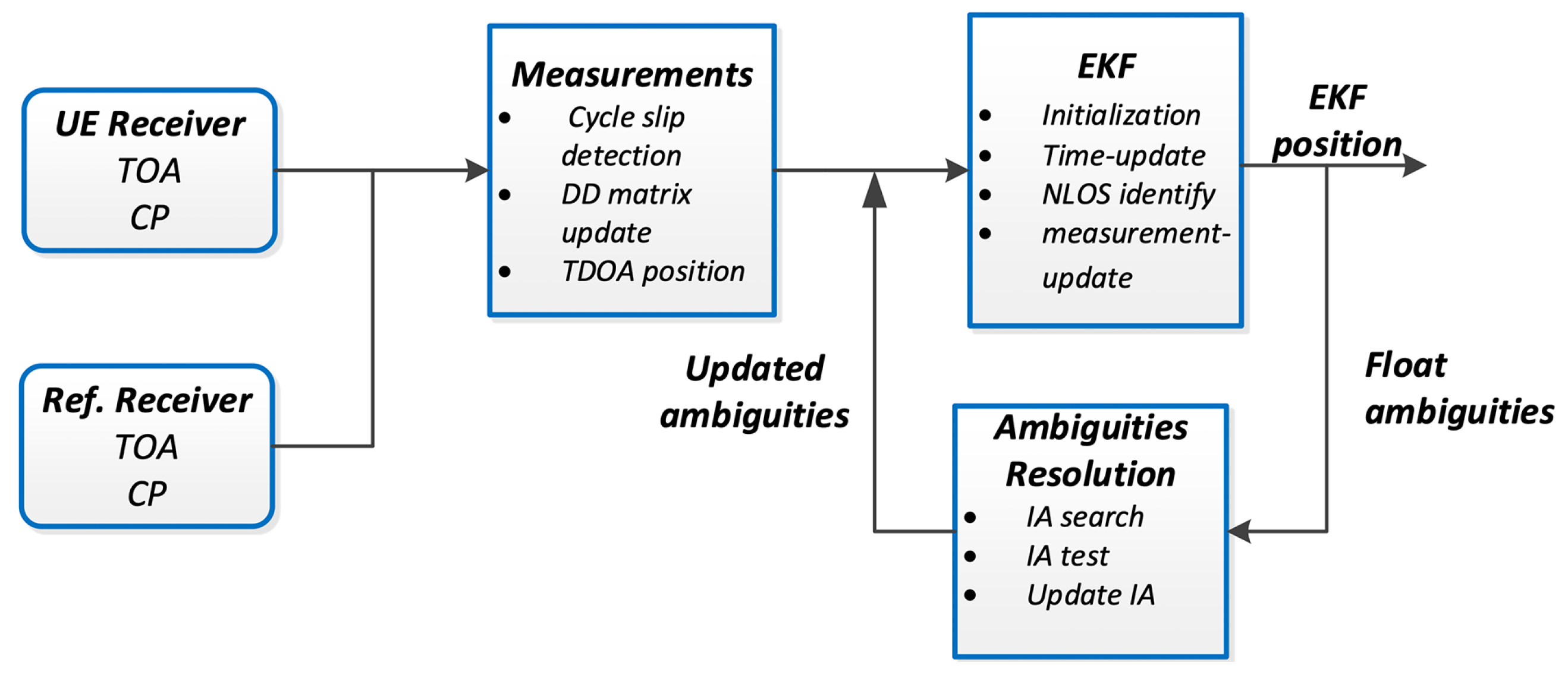
3.2. Extended Kalman Filter
- UE position. EKF for positioning needs to include the states associated with the unknown UE position. The EKF may use the 2D (or 3D) UE position coordinates directly as the EKF states. For example, in the following discussion of the EKF design, we assume the EKF states include a 2D position.
- UE velocity. With the consideration of UE mobility, the EKF states may also include the UE velocity. The number of states for UE velocity is generally the same as the number of states for UE position.
- Integer ambiguities. The premise of using the carrier phase for location is to solve integer ambiguities. According to Equation (25), it is necessary to solve the DD integer ambiguities while solving the user position.
3.2.1. NLOS Error Recognition and Elimination Based on EKF
3.2.2. EKF Initialization
3.2.3. Interaction with the Ambiguity Resolution Block
- Initialization: Set a predefined threshold for the ratio test: , e.g., . Set a predefined maximum count , e.g., . Set counter .
- Step 1: For each epoch k, requesting the MLAMBDA to output two sets of the DD integer ambiguities. With the request, MLAMDA will return one group of the best estimates and one group of the second-best of the DD integer ambiguities and together with the corresponding residuals, say and .
- Step 2: Calculate the ratio of , and compared it with a predefined threshold . The smaller indicates that the best DD integer ambiguities estimates and the second-best estimates are close. If , the counter is increased by 1, i.e., . Otherwise, set .
- Step 3: If , declared that the is reliable DD integer ambiguity resolution. Once reliable DD integer ambiguity resolution is obtained, it can be used to update the EKF.
3.2.4. Interaction with the Pre-Processing Measurement Block
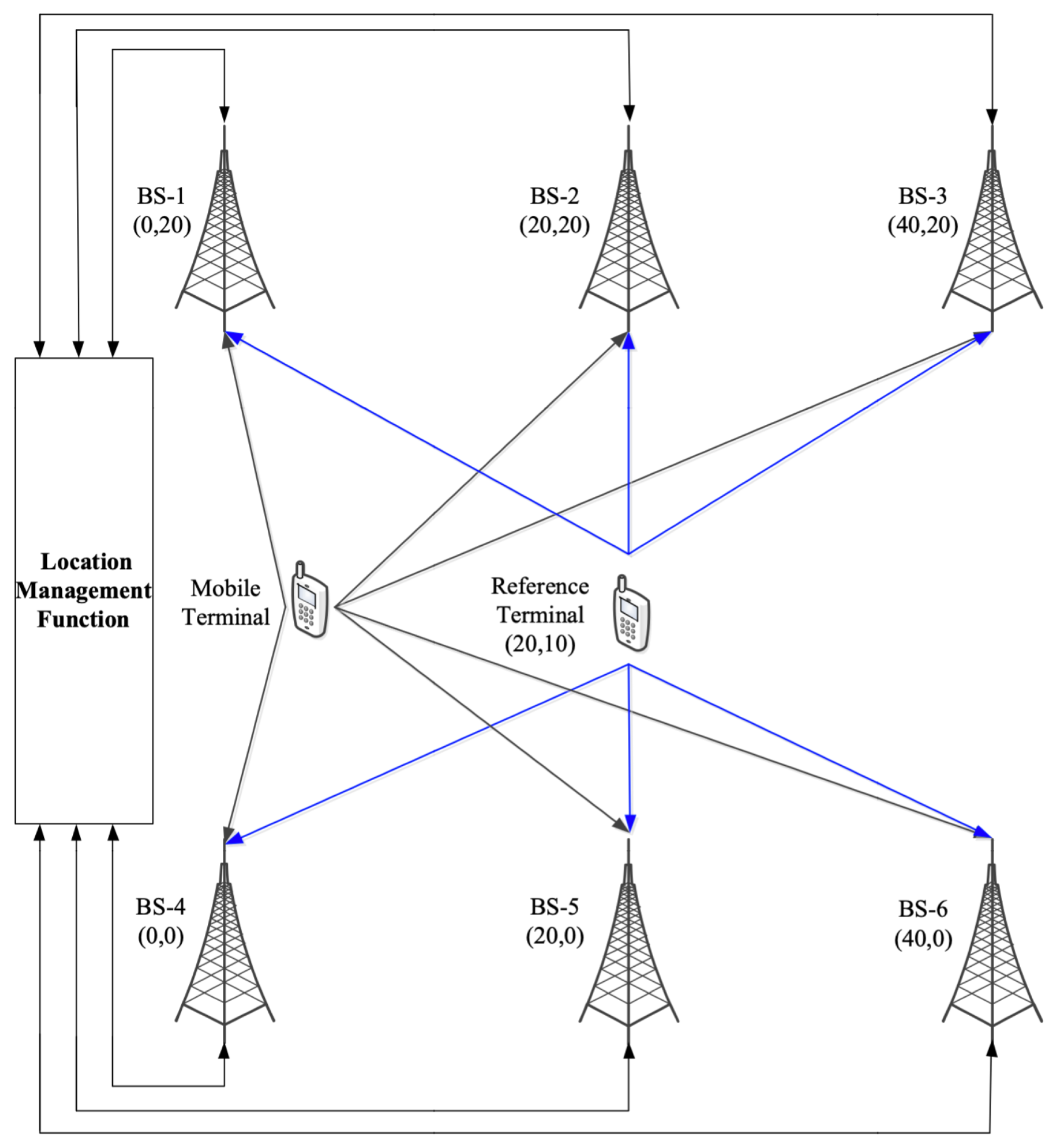
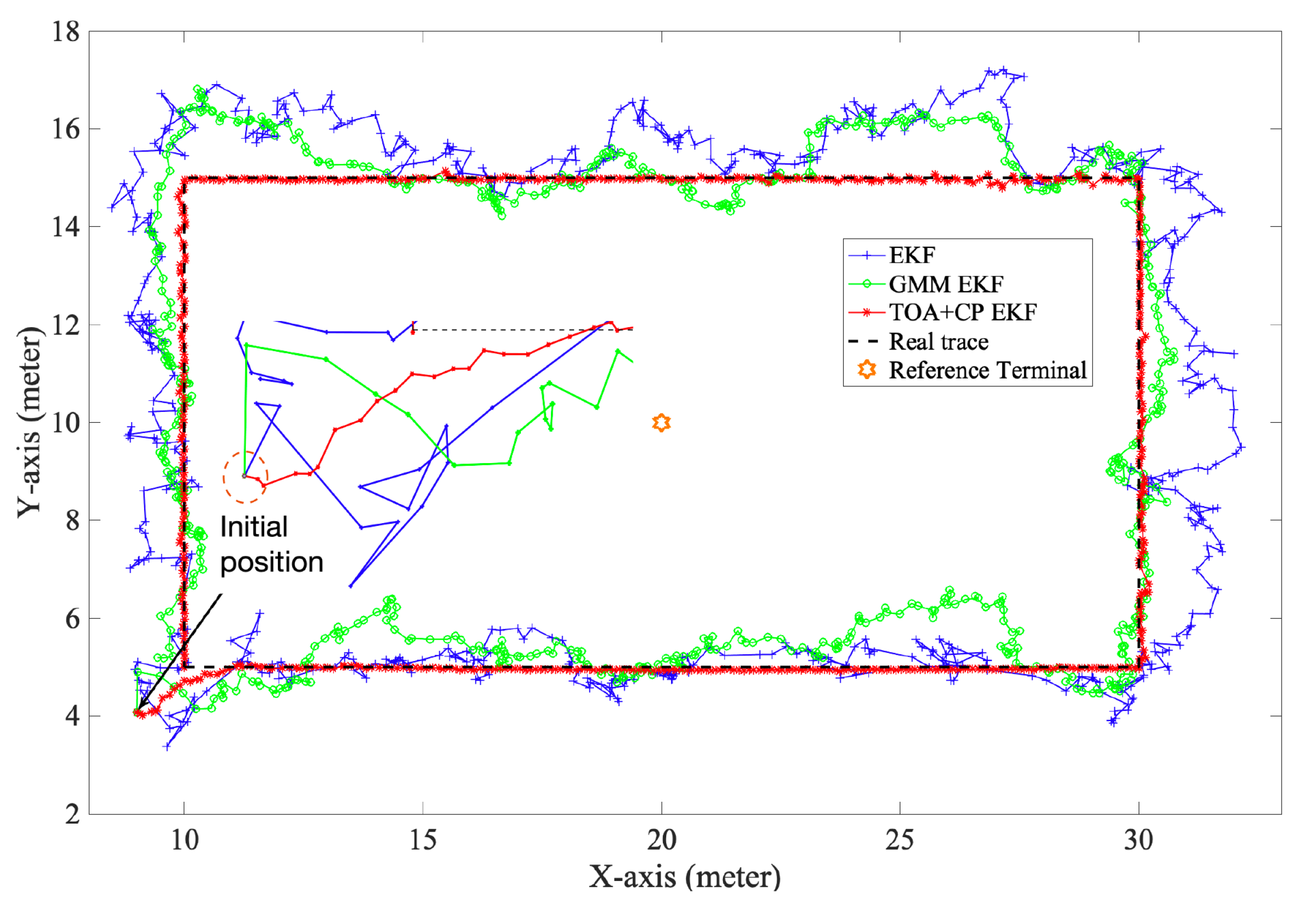
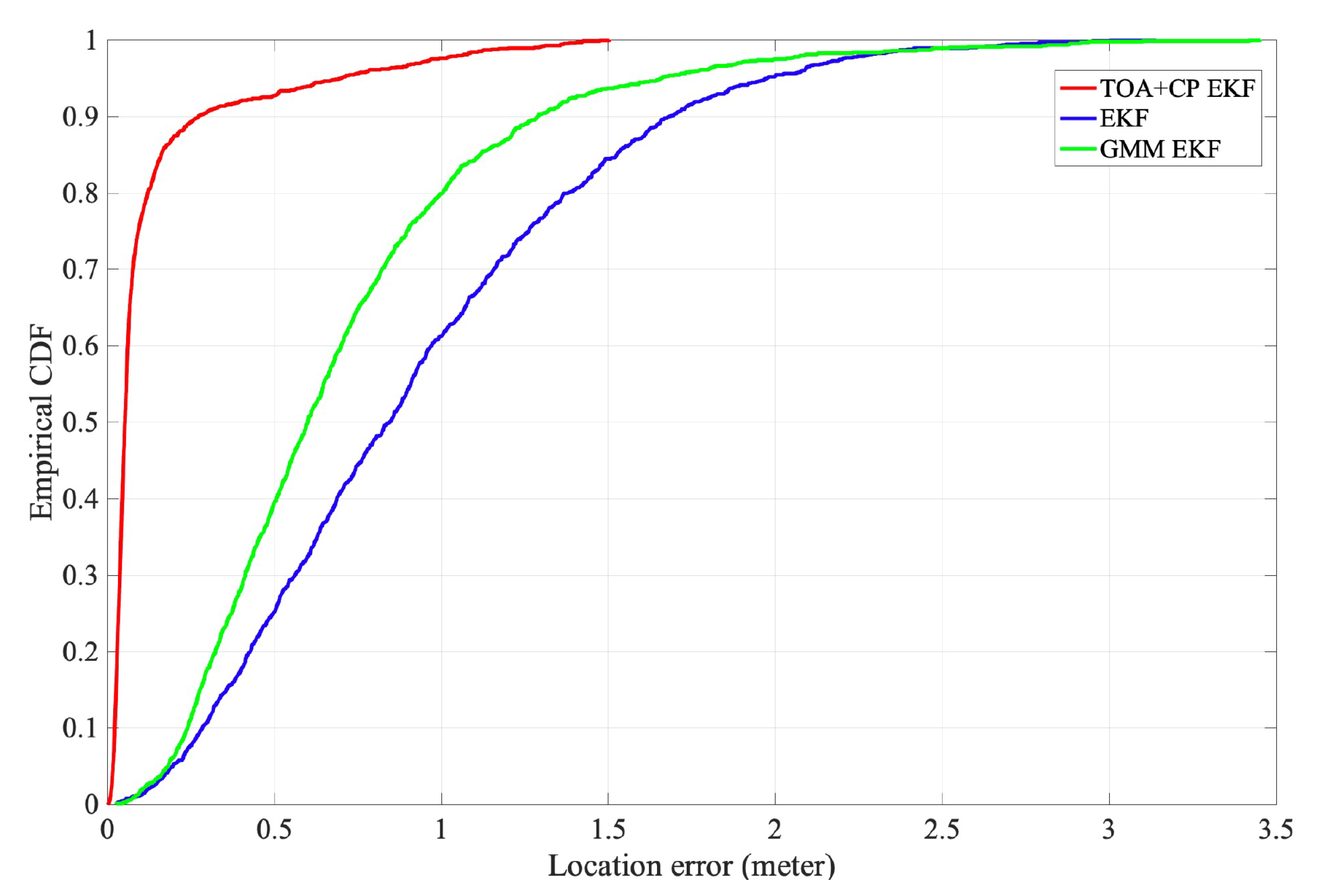
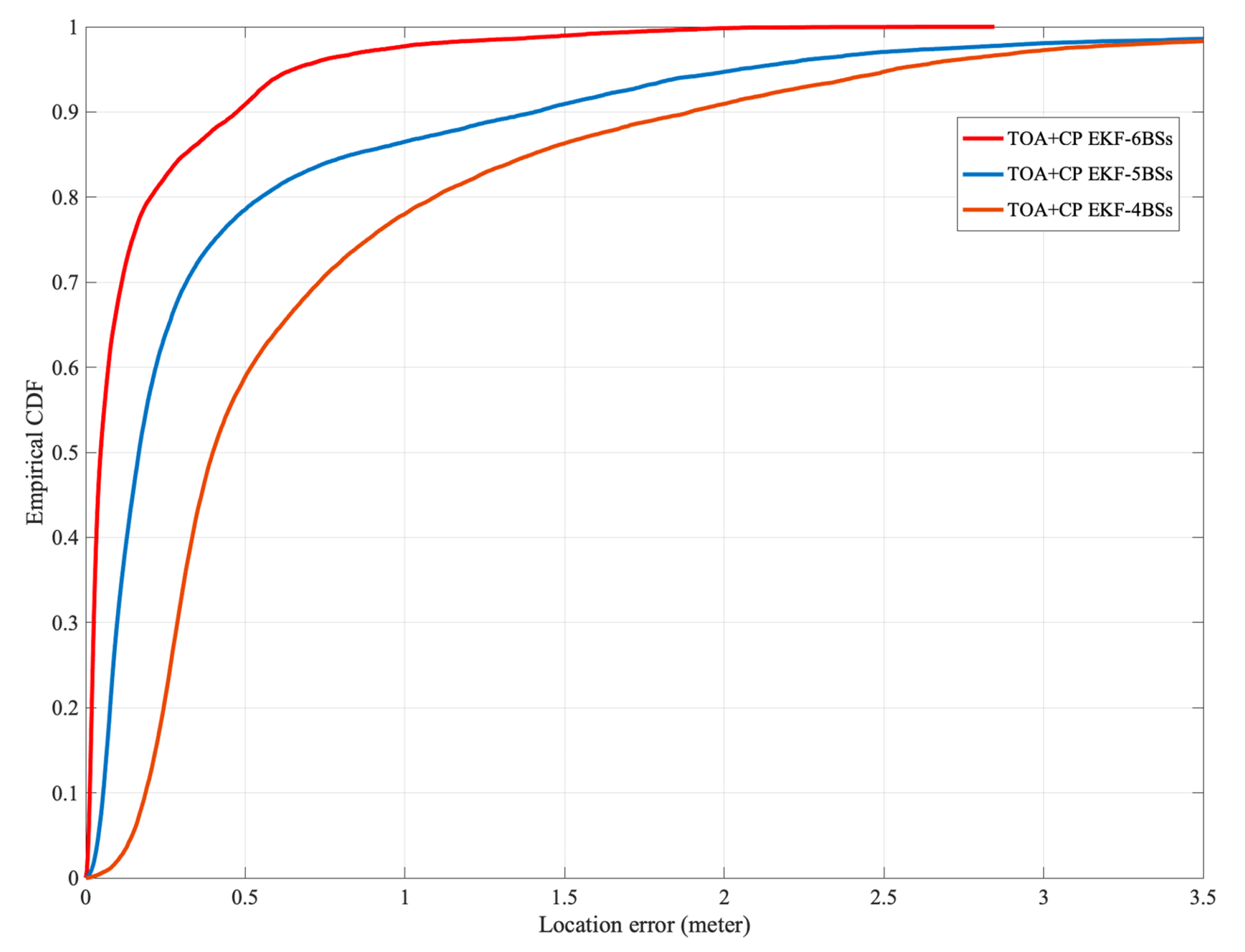
4. Numerical Results
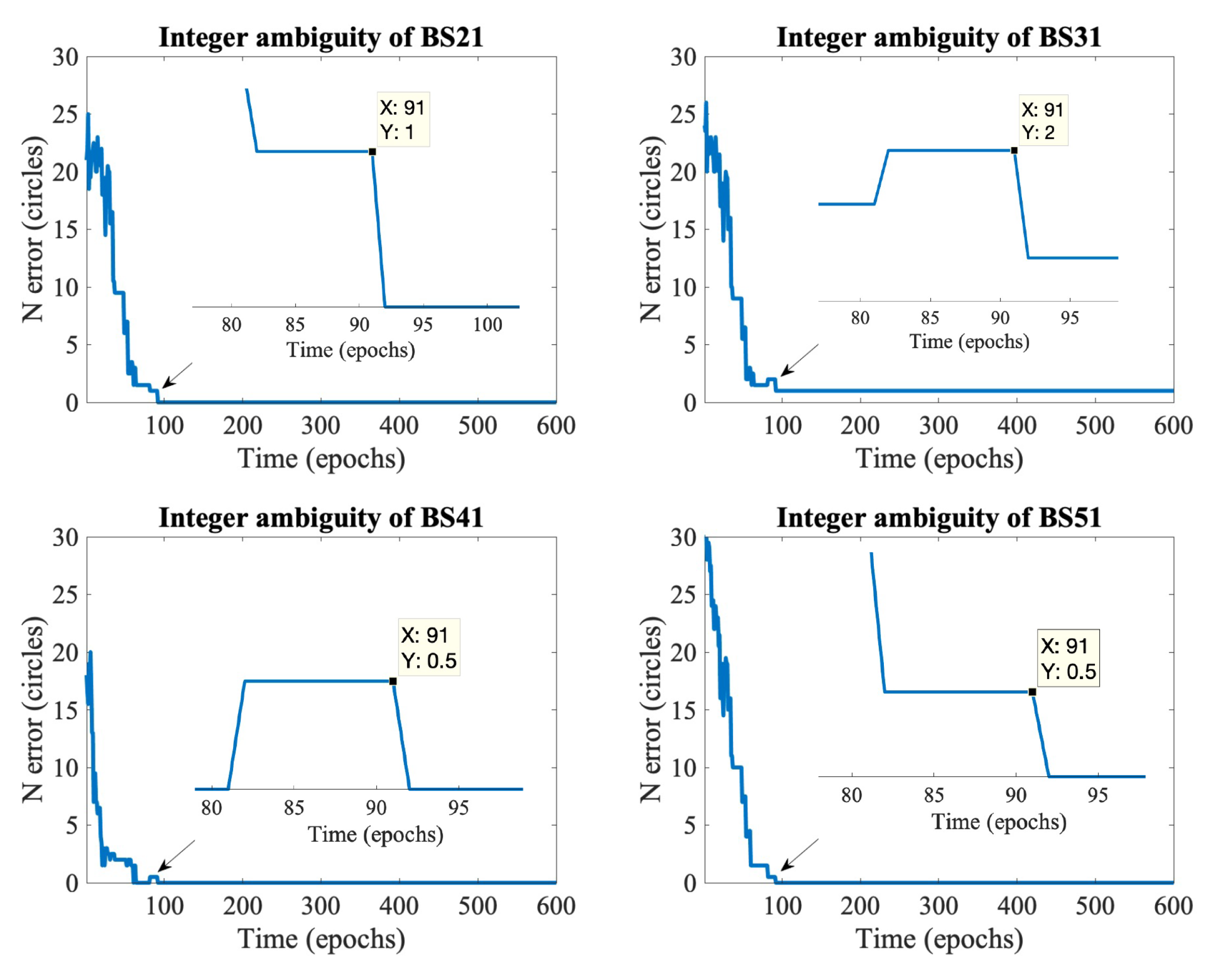
- The accuracy and convergence speed of the integer ambiguity.
- The terminal that can judge whether the solved integer ambiguity is reliable or not.
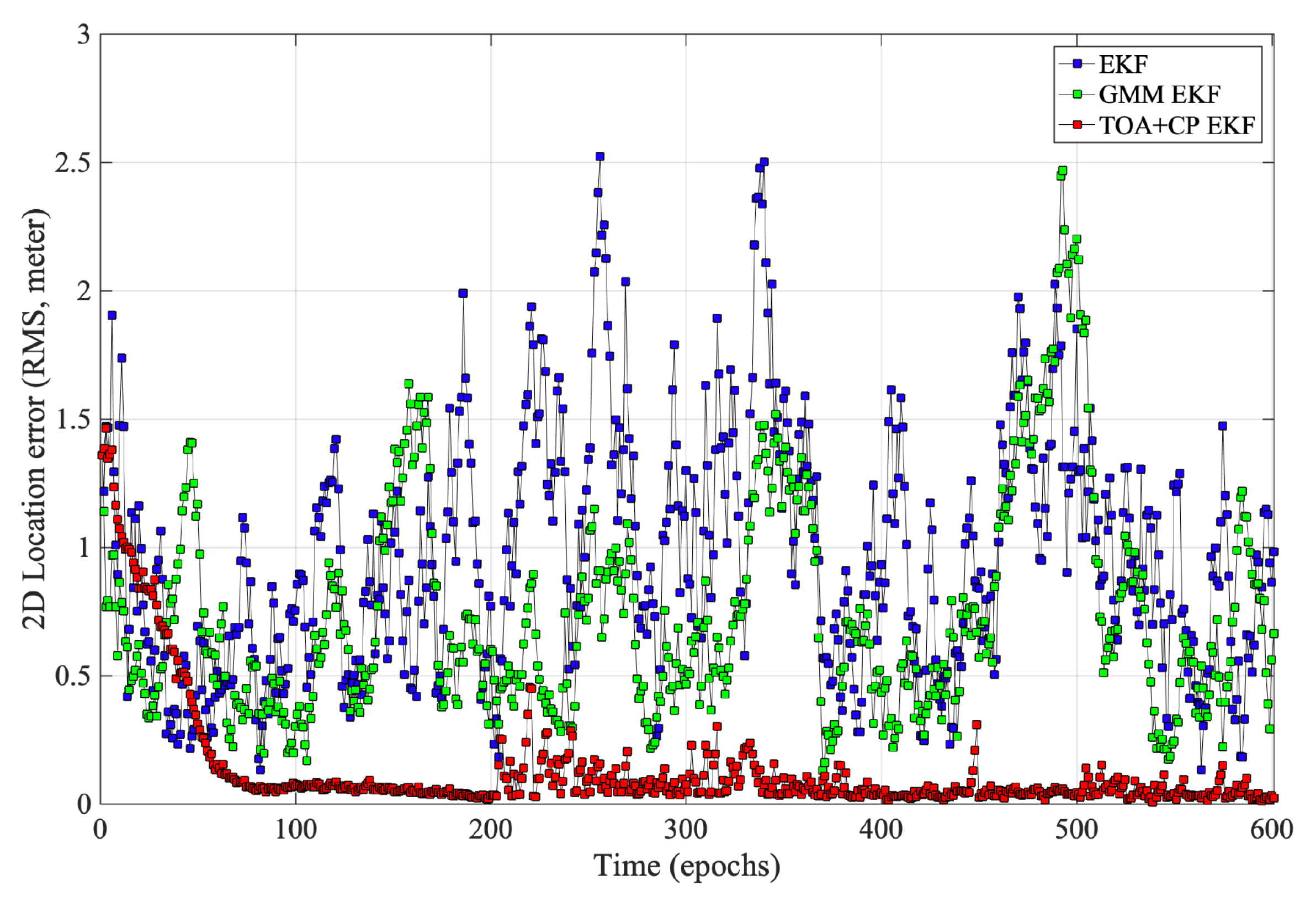
- The real-time positioning accuracy of the terminal position.
- The cumulative distribution curve of positioning error.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Garcia, N.; Wymeersch, H.; Larsson, E.; Haimovich, A.; Coulon, M. Direct Localization for Massive MIMO. IEEE Trans. Signal Process. 2010, 65, 2475–2487. [Google Scholar] [CrossRef] [Green Version]
- Rappaport, T.; Xing, Y.; MacCartney, G.; Molisch, A.; Mellios, E.; Zhang, J. Overview of Millimeter Wave Communications for Fifth Generation (5G) Wireless Networks With a Focus on Propagation Models. IEEE Trans. Antennas Propag. 2017, 65, 6213–6230. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, H. A Survey of Positioning Technology for 5G. J. Beijing Univ. Posts Telecommun. 2018, 41, 1–12. [Google Scholar]
- Ryden, H.; Zaidi, A.A.; Razavi, S.M.; Gunnarsson, F.; Siomina, I. Enhanced time of arrival estimation and quantization for positioning in LTE networks. In Proceedings of the IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–7 September 2016; pp. 1–6. [Google Scholar]
- Bialer, O.; Raphaeli, D.; Weiss, A.J. Robust time-of-arrival estimation in multipath channels with OFDM signals. In Proceedings of the 25th European Signal Processing Conference (EUSIPCO), Kos, Greece, 28 August–2 September 2017; pp. 2724–2728. [Google Scholar]
- Wang, D.; Fattouche, M. OFDM transmission for timebased range estimation. IEEE Signal Process Lett. 2010, 17, 571–574. [Google Scholar] [CrossRef]
- Wang, T.; Shen, Y.; Mazuelas, S. Bounds for OFDM ranging accuracy in multipath channels. In Proceedings of the IEEE International Conference on Ultra-Wideband (ICUWB), Bologna, Italy, 14–16 September 2011; pp. 450–454. [Google Scholar]
- Hu, S.; Berg, A.; Li, X.; Rusek, F. Improving the performance of OTDOA based positioning in NB-IoT systems. In Proceedings of the IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–7. [Google Scholar]
- He, Z.; Ma, Y.; Tafazolli, R. Improved high resolution TOA estimation for OFDM-WLAN based Indoor ranging. IEEE Wirel. Commun. Lett. 2013, 2, 163–166. [Google Scholar] [CrossRef]
- Li, X.; Pahlavan, K. Super-resolution TOA estimation with diversity for Indoor geolocation. IEEE Trans. Wireless Commun. 2004, 3, 224–234. [Google Scholar] [CrossRef]
- Driusso, M.; Marshall, C.; Sabathy, M.; Knutti, F.; Mathis, H.; Babich, F. Vehicular Position Tracking Using LTE Signals. IEEE Trans. Veh. Technol. 2017, 66, 3376–3391. [Google Scholar] [CrossRef]
- Chong, C.; Laurenson, D.; Tan, C.; McLaughlin, S.; Beach, M.; Nix, A. Joint detection-estimation of directional channel parameters using the 2-D frequency domain SAGE algorithm with serial interference cancellation. In Proceedings of the IEEE International Conference on Communications, ICC 2002 (Cat. No.02CH37333), New York, NY, USA, 28 April–2 May 2002; Volume 2, pp. 906–910. [Google Scholar]
- Ma, Y.; Pahlavan, K.; Geng, Y. Comparison of POA and TOA based ranging behavior for RFID application. In Proceedings of the IEEE 25th Annual International Symposium on Personal, Indoor, and Mobile Radio Communication (PIMRC), Washington, DC, USA, 2–5 September 2014. [Google Scholar]
- DiGiampaolo, E.; Martinelli, F. Mobile Robot Localization Using the Phase of Passive UHF RFID Signals. IEEE Trans. Ind. Electron. 2014, 61, 365–376. [Google Scholar] [CrossRef]
- Ma, Y.; Zhou, L.; Liu, K.; Wang, J. Iterative Phase Reconstruction and Weighted Localization Algorithm for Indoor RFID-Based Localization in NLOS Environment. IEEE Sens. J. 2014, 14, 597–611. [Google Scholar] [CrossRef]
- Noschese, M.; Babich, F.; Comisso, M.; Marshall, C.; Driusso, M. A low-complexity approach for time of arrival estimation in OFDM systems. In Proceedings of the International Symposium on Wireless Communication Systems (ISWCS), Bologna, Italy, 28–31 August 2017. [Google Scholar]
- Makki, A.; Siddig, A.; Saad, M.; Bleakley, C.; Cavallaro, J. High-resolution time of arrival estimation for OFDM-based transceivers. Electron. Lett. 2015, 51, 294–296. [Google Scholar] [CrossRef] [Green Version]
- Babich, F.; Noschese, M.; Marshall, C.; Driusso, M. A simple method for TOA estimation in OFDM systems. In Proceedings of the European Navigation Conference (ENC), Lausanne, Switzerland, 9–12 May 2017; pp. 305–310. [Google Scholar]
- Shamaei, K.; Kassas, Z. Sub-meter accurate UAV navigation and cycle slip detection with LTE carrier phase measurements. In Proceedings of the ION Global Navigation Satellite Systems Conference, Miami, FL, USA, 16–20 September 2019. [Google Scholar]
- Abdallah, A.A.; Shamaei, K.M.; Kassas, Z. Performance Characterization of an Indoor Localization System with LTE Code and Carrier Phase Measurements and an IMU. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 3–30 September 2019. [Google Scholar]
- Takasu, T.; Yasuda, A. A Kalman-filter-based integer ambiguity resolution strategy for long-baseline RTK with ionosphere and troposphere estimation. In Proceedings of the ION GNSS, Portland, OR, USA, 21–24 September 2010. [Google Scholar]
- Zhao, S.; Cui, X.; Guan, F.; Liu, M. A Kalman filter-based short baseline RTK algorithm for single-frequency combination of GPS and BDS. Sensors 2014, 14, 15415–15433. [Google Scholar] [CrossRef] [PubMed]
- Richter, A. On the Estimation of Radio Channel Parameters: Models and Algorithms. Ph.D. Thesis, Ilmenau University of Technology, Thuringia, Germany, 2015. [Google Scholar]
- Kay, S. Fundamentals of Statistical Signal Processing. PTR Prentice Hall. August 1994. Available online: https://www.sciencedirect.com/science/article/pii/0967066194901953 (accessed on 1 July 2021).
- Geng, C.; Yuan, X.; Huang, H. Exploiting Channel Correlations for NLOS ToA Localization with Multivariate Gaussian Mixture Models. IEEE Wirel. Commun. Lett 2020, 9, 70–73. [Google Scholar] [CrossRef]
- van de Beek, J.; Edfors, O.; Sandell, M.; Wilson, S.; Borjesson, P. On channel estimation in OFDM systems. In Proceedings of the IEEE 45th Vehicular Technology Conference, Countdown to the Wireless Twenty-First Century, Chicago, IL, USA, 25–28 July 1995. [Google Scholar]
- Xu, W.; Huang, M.; Zhu, C.; Dammann, A. Maximum likelihood TOA and OTDOA estimation with first arriving path detection for 3GPP LTE system. Trans. Emerg. Telecommun. Technol. 2016, 27, 339–356. [Google Scholar] [CrossRef]
- Zhang, Z.; Kang, S. Time of Arrival Estimation Based on Clustering for Positioning in OFDM System. IET Commun. 2020, 14, 2584–2591. [Google Scholar] [CrossRef]
- Kuang, L.; Ni, Z.; Lu, J.; Zheng, J. A time-frequency decision-feedback loop for carrier frequency offset tracking in OFDM systems. IEEE Trans. Wireless Commun. 2005, 4, 367–373. [Google Scholar] [CrossRef]
- 3GPP, FL Summary for Accuracy Improvements by Mitigating UE Rx/Tx and/or gNB Rx/Tx Timing Delays. R1-2103781, Rel.17, 12–20 April 2021. Available online: https://www.3gpp.org/ftp/tsg_ran/WG1_RL1/TSGR1_104b-e/Docs (accessed on 1 July 2021).
- Cui, W.; Li, B.; Zhang, L.; Meng, W. Robust Mobile Location Estimation in NLOS Environment Using GMM, IMM, and EKF. IEEE Syst. J. 2019, 13, 3490–3500. [Google Scholar] [CrossRef]
- Chen, B.; Yang, C.; Liao, F.; Liao, J. Mobile Location Estimator in a Rough Wireless Environment Using Extended Kalman-Based IMM and Data Fusion. IEEE Trans. Veh. Technol. 2009, 58, 1157–1169. [Google Scholar] [CrossRef]
- Chan, Y.; Ho, K. A Simple and Efficient Estimator for Hyperbolic Location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef] [Green Version]
- Chang, X.; Yang, X.; Zhou, T. MLAMBDA: A modified LAMBDA method for integer least-squares estimation. J. Geod. 2005, 79, 552–565. [Google Scholar] [CrossRef] [Green Version]
- Al Borno, M.; Chang, X.; Xie, X. On “decorrelation” in solving integer least-squares problems for ambiguity determination. Surv. Rev. 2014, 46, 37–49. [Google Scholar] [CrossRef]
- 3GPP, Study on Channel Model for Frequencies from 0.5 to 100 GHz. TR 38.901, Rel.15, 11 January 2020. Available online: https://www.3gpp.org/ftp/Specs/archive/38_series/38.901 (accessed on 1 July 2021).
- 3GPP, Physical Channels and Modulation. TS 38.211, Rel.16, 28, September, 2021. Available online: https://www.3gpp.org/ftp/Specs/archive/38_series/38.211 (accessed on 1 July 2021).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Channel model | 5G New Radio (NR) channel model (Indoor-Mixed office [36]). |
| Carrier frequency | 3.5 GHz |
| Carrier wavelength | 0.085 m |
| Inter-site distance | 20 m |
| Room size | 40 m × 20 m |
| Subcarrier spacing | 15 KHz |
| Reference signal | New Radio PRS Structure from [37]. |
| Reference Signal Transmission Bandwidth | 50 MHz |
| Number of BSs | 6 |
| UE-antennas | 4 |
| Number of subcarriers | 3240 |
| FFT Length | 4096 for 50 MHz |
| Sampling rate | 61.44 MHz for 50 MHz |
| Number of occasions used per positioning estimate | 1 |
| Interference modelling | Perfect muting |
| Clock error between BSs | Gaussian distribution with a mean of 25 ns and a variance of 10 ns. |
| Clock error of the terminal | Gaussian distribution with a mean of 50 ns and a variance of 15 ns. |
| Delay spread | Exponential distribution with a mean of 22 ns. |
| Total transmission power | 24 dBm |
| Maximum directional gain of an antenna element | 5 dBi |
| UE speed | 1 m/s |
| Position solution interval | 0.1 s |
| NLOS error identification threshold | |
| Ratio test threshold | |
| LOS generation probability | Table 7.4.2-1 in the literature [36]. |
| Fading model | Large scale fading: Table 7.4.1-1 in the literature [36]; Fast fading: Section 7.5 of [36]. |
| Channel independence | The channel model of the reference device and the channel model of the user terminal are independent of each other. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Kang, S.; Zhang, X. Indoor Carrier Phase Positioning Technology Based on OFDM System. Sensors 2021, 21, 6731. https://doi.org/10.3390/s21206731
Zhang Z, Kang S, Zhang X. Indoor Carrier Phase Positioning Technology Based on OFDM System. Sensors. 2021; 21(20):6731. https://doi.org/10.3390/s21206731
Chicago/Turabian StyleZhang, Zhenyu, Shaoli Kang, and Xiang Zhang. 2021. "Indoor Carrier Phase Positioning Technology Based on OFDM System" Sensors 21, no. 20: 6731. https://doi.org/10.3390/s21206731
APA StyleZhang, Z., Kang, S., & Zhang, X. (2021). Indoor Carrier Phase Positioning Technology Based on OFDM System. Sensors, 21(20), 6731. https://doi.org/10.3390/s21206731