
Monitoring Flexions and Torsions of the Trunk via Gyroscope-Calibrated Capacitive Elastomeric Wearable Sensors

 ,
,  ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (i)
- the demonstration of a strategy to calibrate the system for flexions and torsions, avoiding the limitations of typical solutions described in the literature, such as angular measurements with bulky, unpractical and/or expensive external equipment (e.g., stereophotogrammetry [22,23,24,25,26,27,28]), or pose recognitions via interpolations of data acquired from reference poses, which however do not provide accurate angular measurements [29,30,31]; to that aim, in this study, we used a wearable three-axial gyroscope;
- (ii)
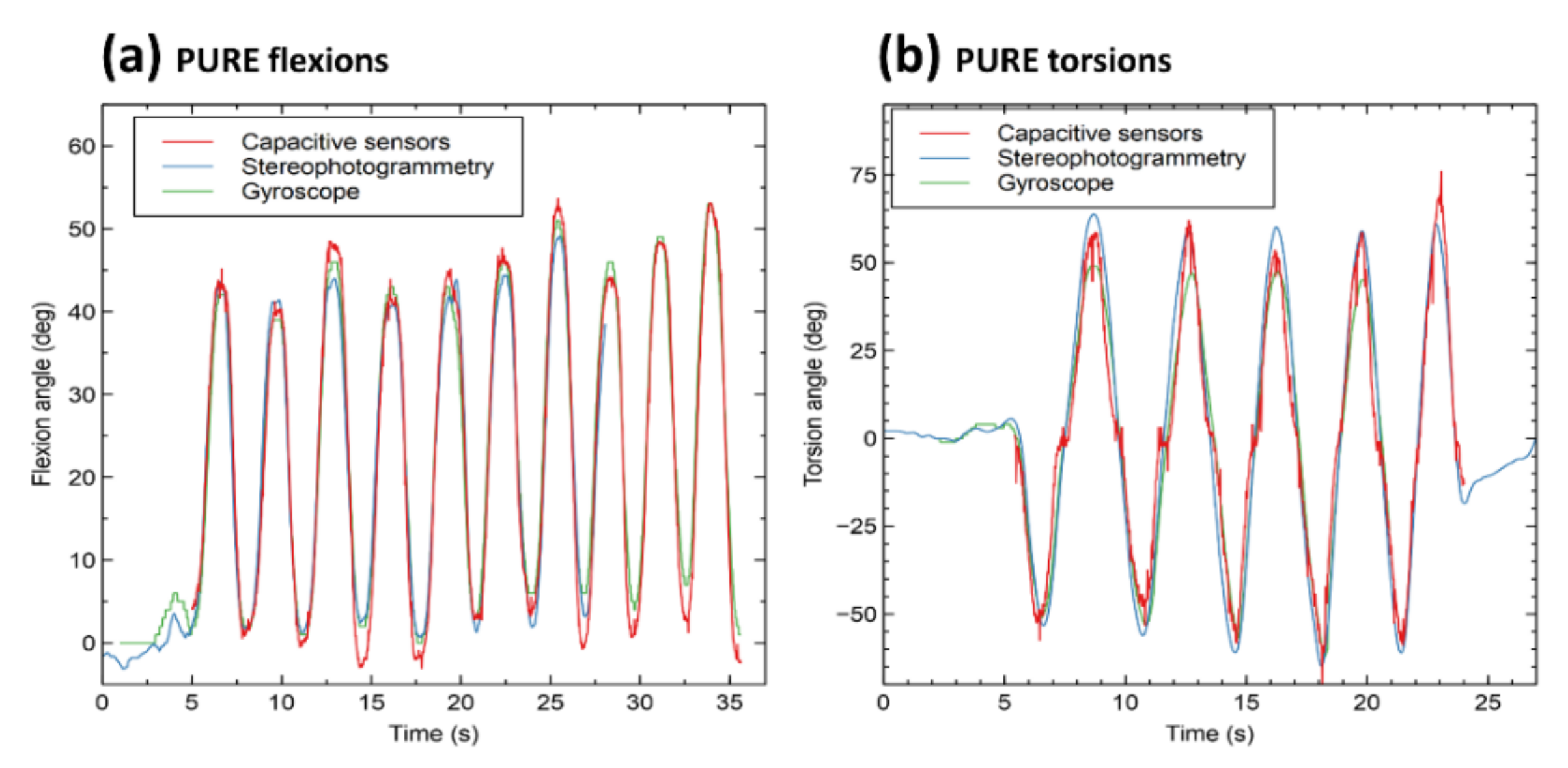
- a comparison of the sensing accuracy of a new wearable system in measuring both flexions and torsions, relative to conventional stereophotogrammetry (as the non-wearable standard technology).
2. Materials and Methods
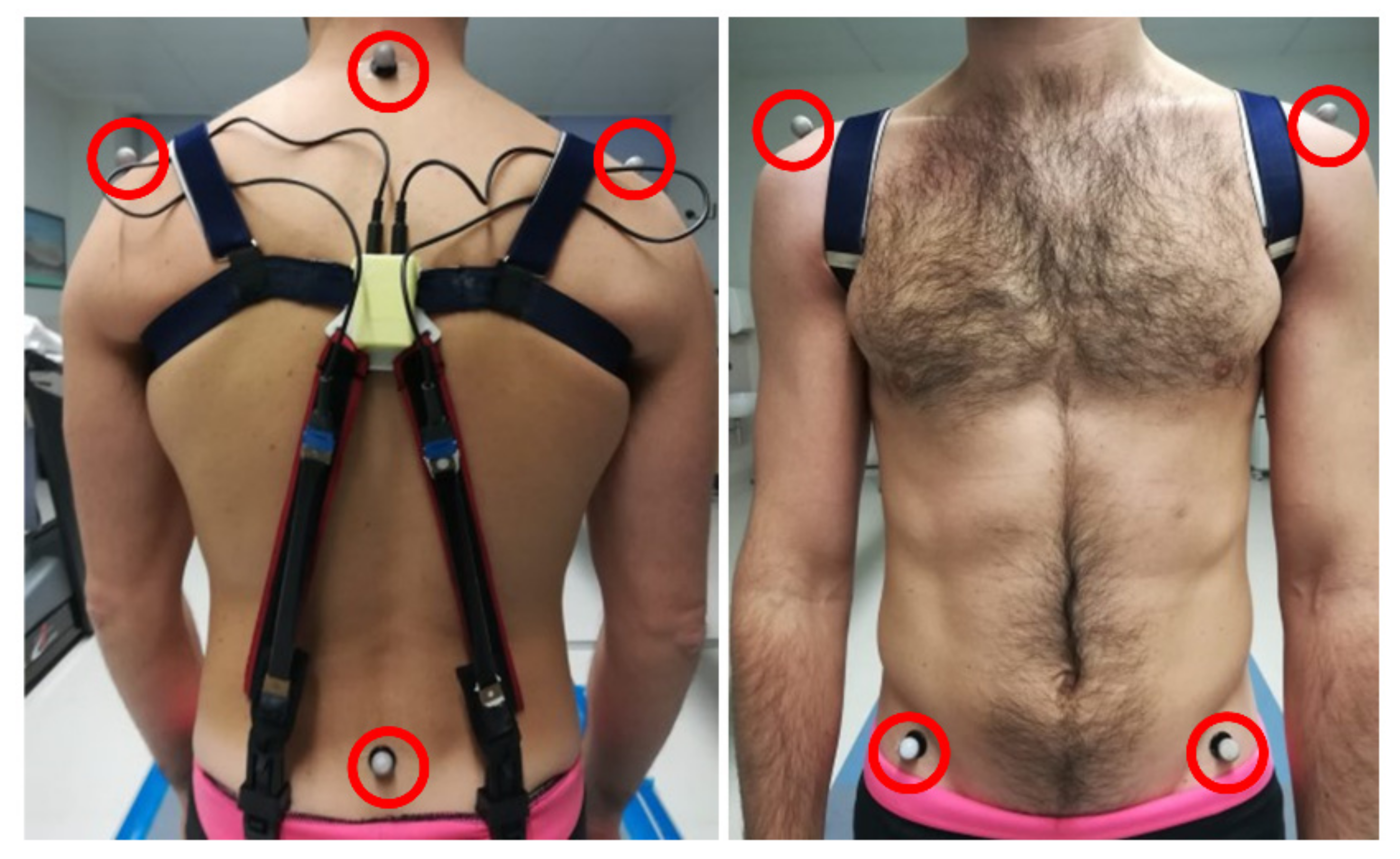
2.1. The Wearable Sensing System
2.2. Wireless Electronics
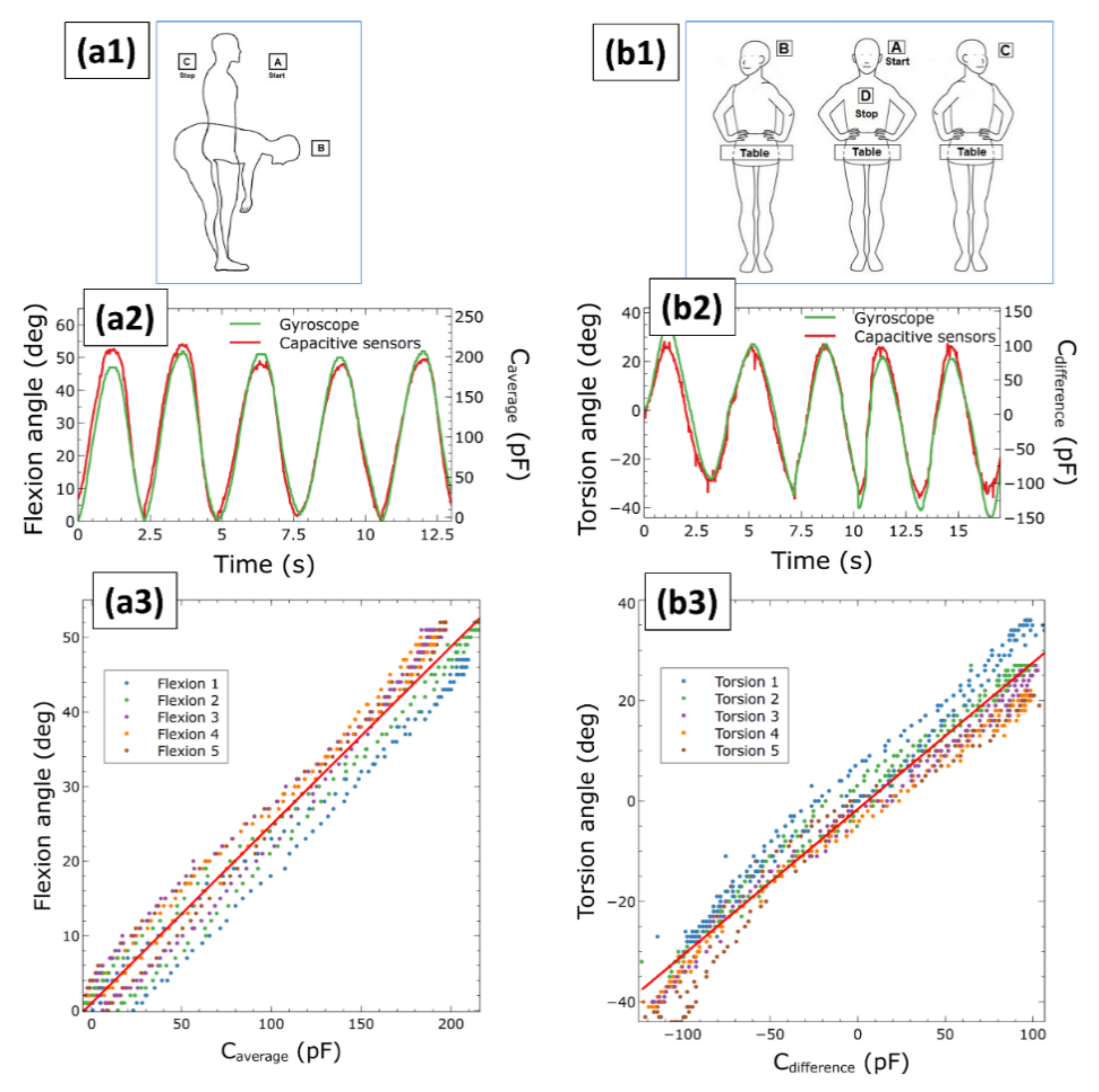
2.3. Capacitive Sensors’ Calibration Using the Gyroscope
2.4. Assessment of the Capacitive Sensors’ Accuracy
3. Results and Discussion
3.1. Capacitive Sensors’ Calibration
3.2. Capacitive Sensors’ Accuracy
4. Conclusions and Future Developments
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hoogendoorn, W.E.; Bongers, P.M.; De Vet, H.C.; Douwes, M.; Koes, B.W.; Miedema, M.C.; Ariëns, G.A.; Bouter, L.M. Flexion and Rotation of the Trunk and Lifting at Work Are Risk Factors for Low Back Pain: Results of a Prospective Cohort Study. Spine 2000, 25, 3087–3092. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leclerc, A.; Tubach, F.; Landre, M.-F.; Ozguler, A. Personal and Occupational Predictors of Sciatica in the GAZEL Cohort. Occup. Med. 2003, 53, 384–391. [Google Scholar] [CrossRef] [Green Version]
- Miranda, H.; Viikari-Juntura, E.; Punnett, L.; Riihimäki, H. Occupational Loading, Health Behavior and Sleep Disturbance as Predictors of Low-Back Pain. Scand. J. Work Environ. Health 2008, 34, 411–419. [Google Scholar] [CrossRef] [Green Version]
- Norman, R.; Wells, R.; Neumann, P.; Frank, J.; Shannon, H.; Kerr, M.; A Comparison of Peak, vs. Cumulative Physical Work Exposure Risk Factors for the Reporting of Low Back Pain in the Automotive Industry. Clin. Biomech. 1998, 13, 561–573. [Google Scholar]
- Cappozzo, A.; Croce, U.D.; Leardini, A.; Chiari, L. Human Movement Analysis Using Stereophotogrammetry: Part 1: Theoretical Background. Gait Posture 2005, 21, 186–196. [Google Scholar]
- Homayounfar, S.Z.; Andrew, T.L. Wearable Sensors for Monitoring Human Motion: A Review on Mechanisms, Materials, and Challenges. SLAS Technol. Transl. Life Sci. Innov. 2020, 25, 9–24. [Google Scholar] [CrossRef]
- Kok, M.; Hol, J.D.; Schön, T.B. Using Inertial Sensors for Position and Orientation Estimation. Found. Trends Signal Process. 2017, 11, 1–153. [Google Scholar] [CrossRef] [Green Version]
- Bergamini, E.; Ligorio, G.; Summa, A.; Vannozzi, G.; Cappozzo, A.; Sabatini, A.M. Estimating Orientation Using Magnetic and Inertial Sensors and Different Sensor Fusion Approaches: Accuracy Assessment in Manual and Locomotion Tasks. Sensors 2014, 14, 18625–18649. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tanenhaus, M.; Carhoun, D.; Geis, T.; Wan, E.; Holland, A. Miniature IMU/INS with Optimally Fused Low Drift MEMS Gyro and Accelerometers for Applications in GPS-Denied Environments. In Proceedings of the IEEE/ION PLANS, Myrtle Beach, SC, USA, 24–26 April 2012; Volume 2012, pp. 259–264. [Google Scholar]
- Khial, P.P.; White, A.D.; Hajimiri, A. Nanophotonic Optical Gyroscope with Reciprocal Sensitivity Enhancement. Nat. Photonics 2018, 12, 671–675. [Google Scholar] [CrossRef] [Green Version]
- Consmüller, T.; Rohlmann, A.; Weinland, D.; Druschel, C.; Duda, G.N.; Taylor, W.R. Comparative Evaluation of a Novel Measurement Tool to Assess Lumbar Spine Posture and Range of Motion. Eur. Spine J. 2012, 21, 2170–2180. [Google Scholar] [CrossRef] [Green Version]
- Tojima, M.; Ogata, N.; Yozu, A.; Sumitani, M.; Haga, N. Novel 3-Dimensional Motion Analysis Method for Measuring the Lumbar Spine Range of Motion: Repeatability and Reliability Compared with an Electrogoniometer. Spine 2013, 38, E1327–E1333. [Google Scholar] [CrossRef] [PubMed]
- Tognetti, A.; Lorussi, F.; Mura, G.D.; Carbonaro, N.; Pacelli, M.; Paradiso, R.; De Rossi, D. New Generation of Wearable Goniometers for Motion Capture Systems. J. Neuroeng. Rehabil. 2014, 11, 56. [Google Scholar] [CrossRef] [PubMed]
- Tognetti, A.; Lorussi, F.; Carbonaro, N.; De Rossi, D. Wearable Goniometer and Accelerometer Sensory Fusion for Knee Joint Angle Measurement in Daily Life. Sensors 2015, 15, 28435–28455. [Google Scholar] [CrossRef] [Green Version]
- Mills, P.M.; Morrison, S.; Lloyd, D.G.; Barrett, R.S. Repeatability of 3D Gait Kinematics Obtained from an Electromagnetic Tracking System during Treadmill Locomotion. J. Biomech. 2007, 40, 1504–1511. [Google Scholar] [CrossRef] [PubMed]
- Schuler, N.B.; Bey, M.J.; Shearn, J.T.; Butler, D.L. Evaluation of an Electromagnetic Position Tracking Device for Measuring in Vivo, Dynamic Joint Kinematics. J. Biomech. 2005, 38, 2113–2117. [Google Scholar] [CrossRef] [PubMed]
- Lorussi, F.; Rocchia, W.; Scilingo, E.P.; Tognetti, A.; De Rossi, D. Wearable, Redundant Fabric-Based Sensor Arrays for Reconstruction of Body Segment Posture. IEEE Sens. J. 2004, 4, 807–818. [Google Scholar] [CrossRef] [Green Version]
- Tognetti, A.; Lorussi, F.; Bartalesi, R.; Quaglini, S.; Tesconi, M.; Zupone, G.; De Rossi, D. Wearable Kinesthetic System for Capturing and Classifying Upper Limb Gesture in Post-Stroke Rehabilitation. J. Neuroeng. Rehabil. 2005, 2, 8. [Google Scholar] [CrossRef]
- De Rossi, D.; Carpi, F.; Carbonaro, N.; Tognetti, A.; Scilingo, E.P. Electroactive Polymer Patches for Wearable Haptic Interfaces. In Proceedings of the EMBC 2011, the 33rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 8369–8372. [Google Scholar]
- De Rossi, D.; Carpi, F.; Lorussi, F.; Scilingo, E.P.; Tognetti, A. Wearable Kinesthetic Systems and Emerging Technologies in Actuation for Upperlimb Neurorehabilitation. In Proceedings of the EMBC 2009, the 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 2–6 September 2009; pp. 6830–6833. [Google Scholar]
- Carpi, F.; De Rossi, D.; Kornbluh, R.; Pelrine, R.E.; Sommer-Larsen, P. (Eds.) Dielectric Elastomers as Electromechanical Eransducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology; Elsevier: Oxford, UK, 2008. [Google Scholar]
- Nakamoto, H.; Yamaji, T.; Yamamoto, A.; Ootaka, H.; Bessho, Y.; Kobayashi, F.; Ono, R. Wearable Lumbar-Motion Monitoring Device with Stretchable Strain Sensors. J. Sens. 2018, 2018, 7480528. [Google Scholar] [CrossRef]
- Feng, Y.; Li, Y.; McCoul, D.; Qin, S.; Jin, T.; Huang, B.; Zhao, J. Dynamic Measurement of Legs Motion in Sagittal Plane Based on Soft Wearable Sensors. J. Sens. 2020, 2020, 9231571. [Google Scholar] [CrossRef]
- Ma, X.; Guo, J.; Lee, K.-M.; Yang, L.; Chen, M. A Soft Capacitive Wearable Sensing System for Lower-Limb Motion Monitoring. In Proceedings of the International Conference on Intelligent Robotics and Applications, Shenyang, China, 8–11 August 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 467–479. [Google Scholar]
- Yamamoto, A.; Nakamoto, H.; Yamaji, T.; Ootaka, H.; Bessho, Y.; Nakamura, R.; Ono, R. Method for Measuring Tri-Axial Lumbar Motion Angles Using Wearable Sheet Stretch Sensors. PLoS ONE 2017, 12, e0183651. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, B.; Li, M.; Mei, T.; McCoul, D.; Qin, S.; Zhao, Z.; Zhao, J. Wearable Stretch Sensors for Motion Measurement of the Wrist Joint Based on Dielectric Elastomers. Sensors 2017, 17, 2708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vu, L.Q.; Amick, R.Z.; Kim, K.H.; Rajulu, S.L. Evaluation of Lumbar Motion with Fabric Strain Sensors: A Pilot Study. Int. J. Ind. Ergon. 2019, 69, 194–199. [Google Scholar] [CrossRef]
- Vu, L.Q.; Kim, K.H.; Schulze, L.J.; Rajulu, S.L. Lumbar Posture Assessment with Fabric Strain Sensors. Comput. Biol. Med. 2020, 118, 103624. [Google Scholar] [CrossRef] [PubMed]
- Glauser, O.; Wu, S.; Panozzo, D.; Hilliges, O.; Sorkine-Hornung, O. Interactive Hand Pose Estimation Using a Stretch-Sensing Soft Glove. ACM Trans. Graph. 2019, 38, 41. [Google Scholar] [CrossRef] [Green Version]
- Landgraf, M.; Yoo, I.S.; Sessner, J.; Mooser, M.; Kaufmann, D.; Mattejat, D.; Reitelshöfer, S.; Franke, J. Gesture Recognition with Sensor Data Fusion of Two Complementary Sensing Methods. In Proceedings of the 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Enschede, The Netherlands, 26–29 August 2018; pp. 795–800. [Google Scholar]
- Walker, C.R.; Anderson, I.A. Monitoring Diver Kinematics with Dielectric Elastomer Sensors. In Proc. SPIE 10163, Electroactive Polymer Actuators and Devices (EAPAD); SPIE: Bellingham, WA, USA, 2017; pp. 1016307-1–1016307-11. [Google Scholar]
- Frediani, G.; Botondi, B.; Quartini, L.; Zonfrillo, G.; Bocchi, L.; Carpi, F. Wearable Kinematic Monitoring System Based on Piezocapacitive Sensors. In pHealth; IOS Press: Amsterdam, The Netherlands, 2019; Volume 2019, pp. 103–108. [Google Scholar]
- Frediani, G.; Bocchi, L.; Vannetti, F.; Zonfrillo, G.; Carpi, F. Wearable Detection of Trunk Flexions: Capacitive Elastomeric Sensors Compared to Inertial Sensors. Sensors 2021, 21, 5453. [Google Scholar] [CrossRef]
- StretchSense. Available online: https://stretchsense.com (accessed on 1 July 2021).






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frediani, G.; Vannetti, F.; Bocchi, L.; Zonfrillo, G.; Carpi, F. Monitoring Flexions and Torsions of the Trunk via Gyroscope-Calibrated Capacitive Elastomeric Wearable Sensors. Sensors 2021, 21, 6706. https://doi.org/10.3390/s21206706
Frediani G, Vannetti F, Bocchi L, Zonfrillo G, Carpi F. Monitoring Flexions and Torsions of the Trunk via Gyroscope-Calibrated Capacitive Elastomeric Wearable Sensors. Sensors. 2021; 21(20):6706. https://doi.org/10.3390/s21206706
Chicago/Turabian StyleFrediani, Gabriele, Federica Vannetti, Leonardo Bocchi, Giovanni Zonfrillo, and Federico Carpi. 2021. "Monitoring Flexions and Torsions of the Trunk via Gyroscope-Calibrated Capacitive Elastomeric Wearable Sensors" Sensors 21, no. 20: 6706. https://doi.org/10.3390/s21206706
APA StyleFrediani, G., Vannetti, F., Bocchi, L., Zonfrillo, G., & Carpi, F. (2021). Monitoring Flexions and Torsions of the Trunk via Gyroscope-Calibrated Capacitive Elastomeric Wearable Sensors. Sensors, 21(20), 6706. https://doi.org/10.3390/s21206706