In-Situ Estimation of Soil Water Retention Curve in Silt Loam and Loamy Sand Soils at Different Soil Depths


 ,
, 
Abstract
1. Introduction
2. Materials and Methods
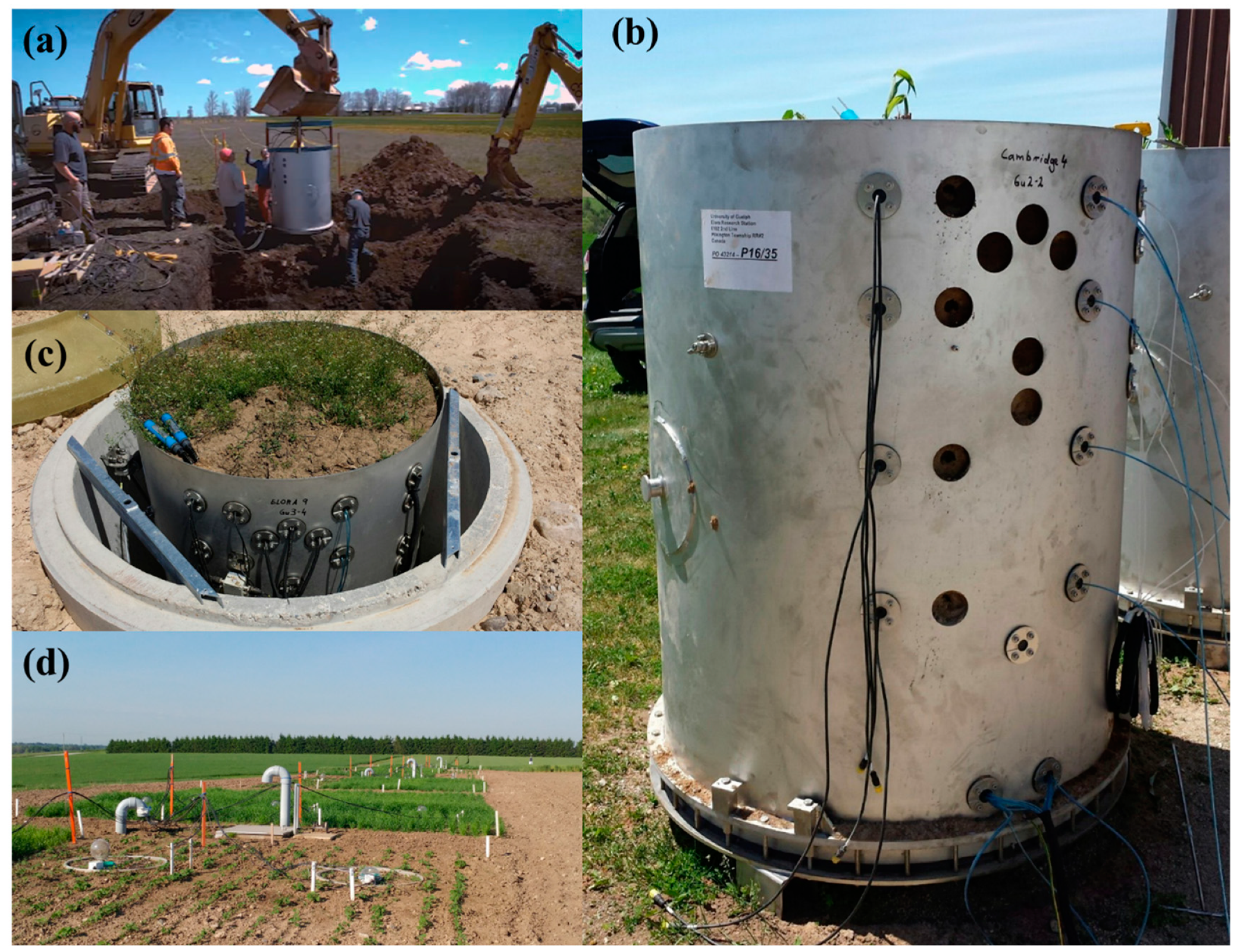
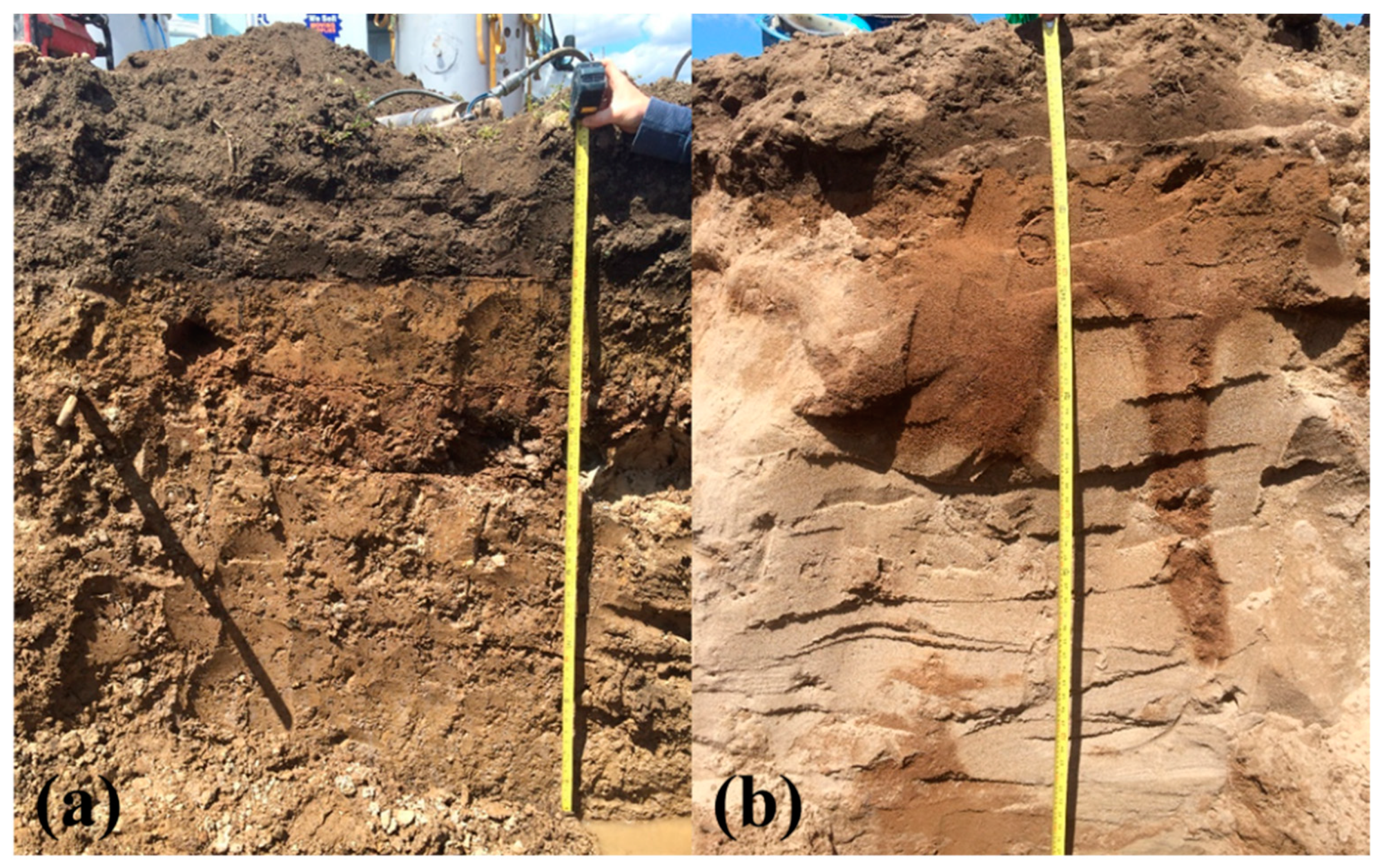
2.1. Sampling and Measurement Procedures
2.2. Soil Water Characteristic Functions
2.3. Methodology for Fitting Water Retention Parametric Models
2.4. Plant-Available Water Calculations
2.5. Descriptive Statistics
3. Results and Discussion
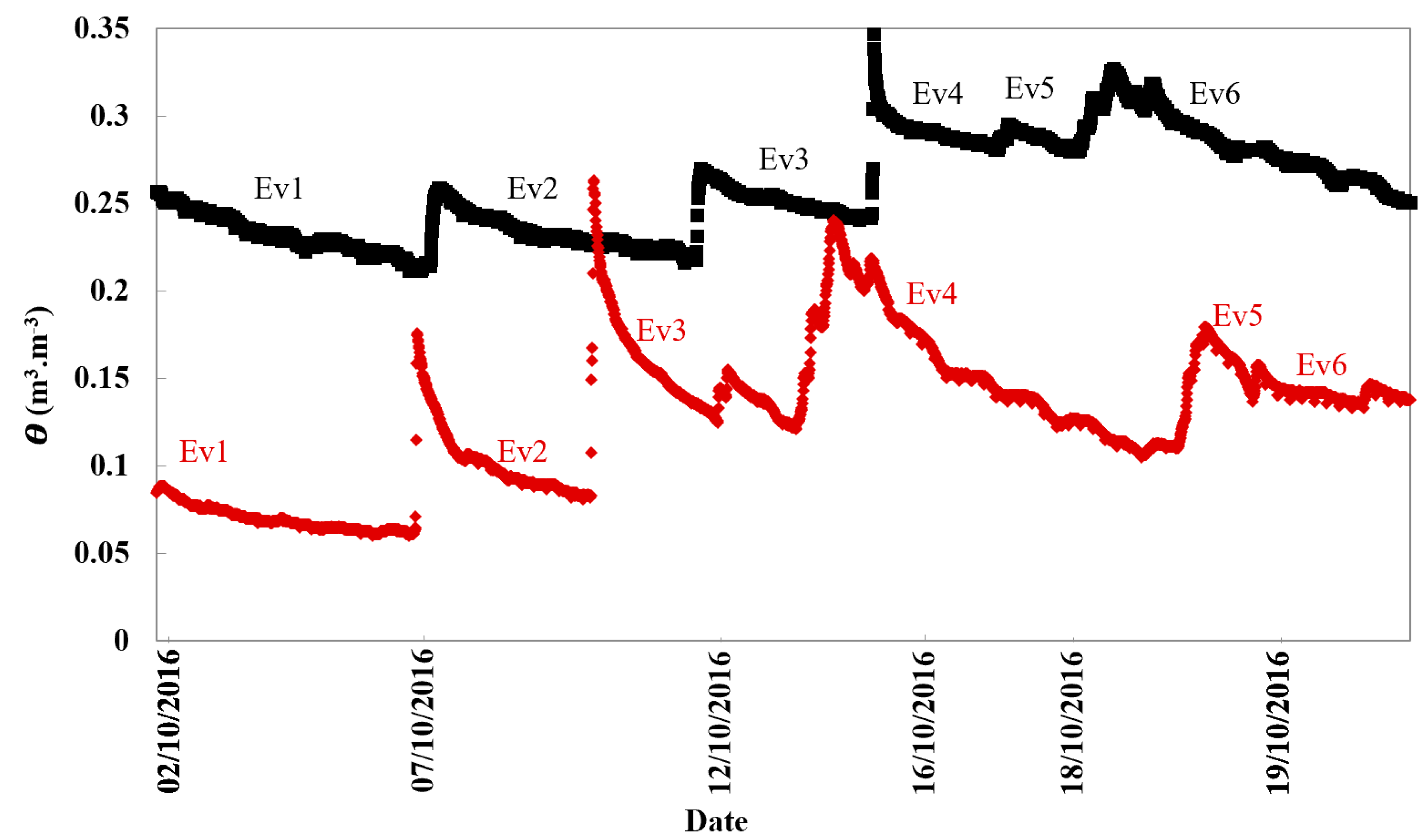
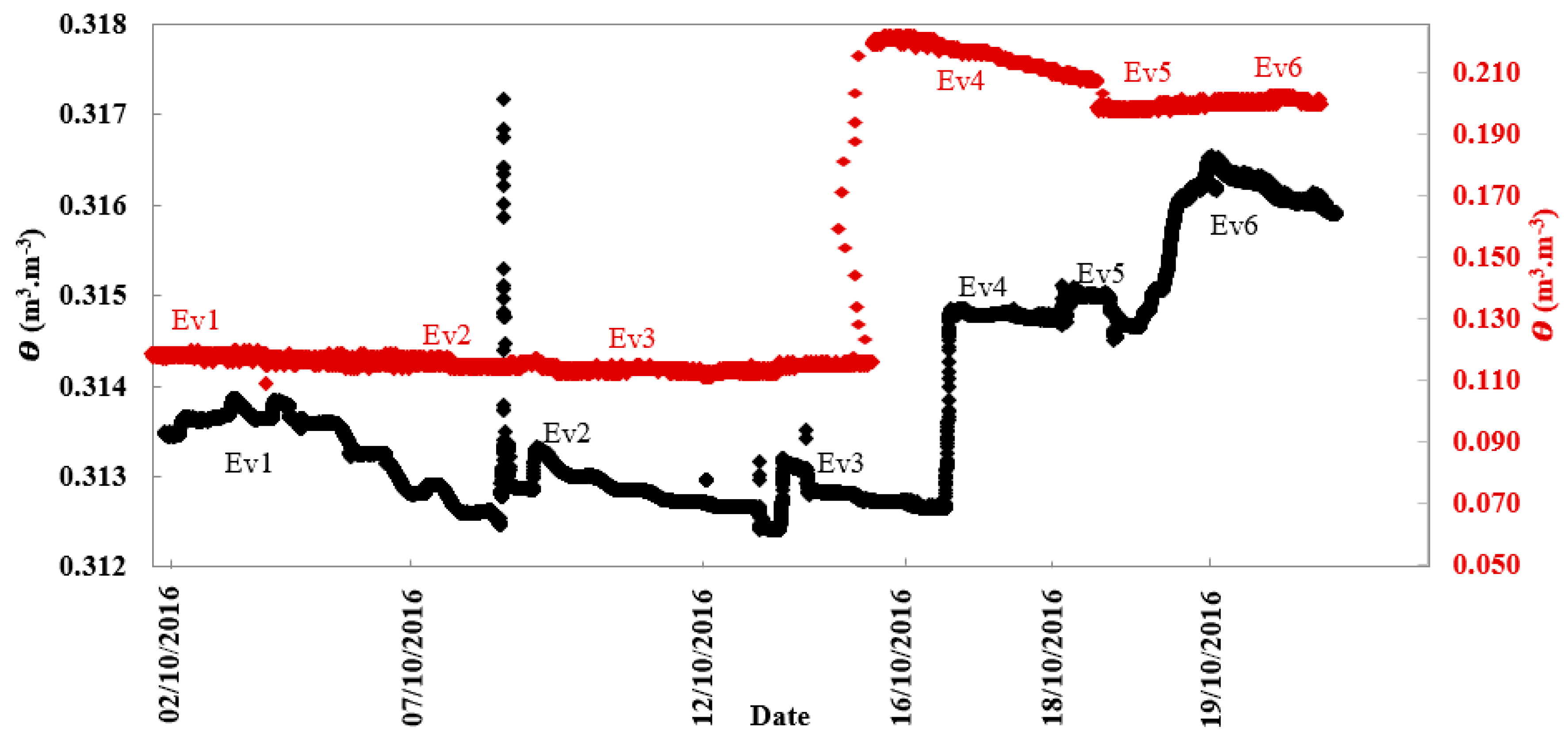
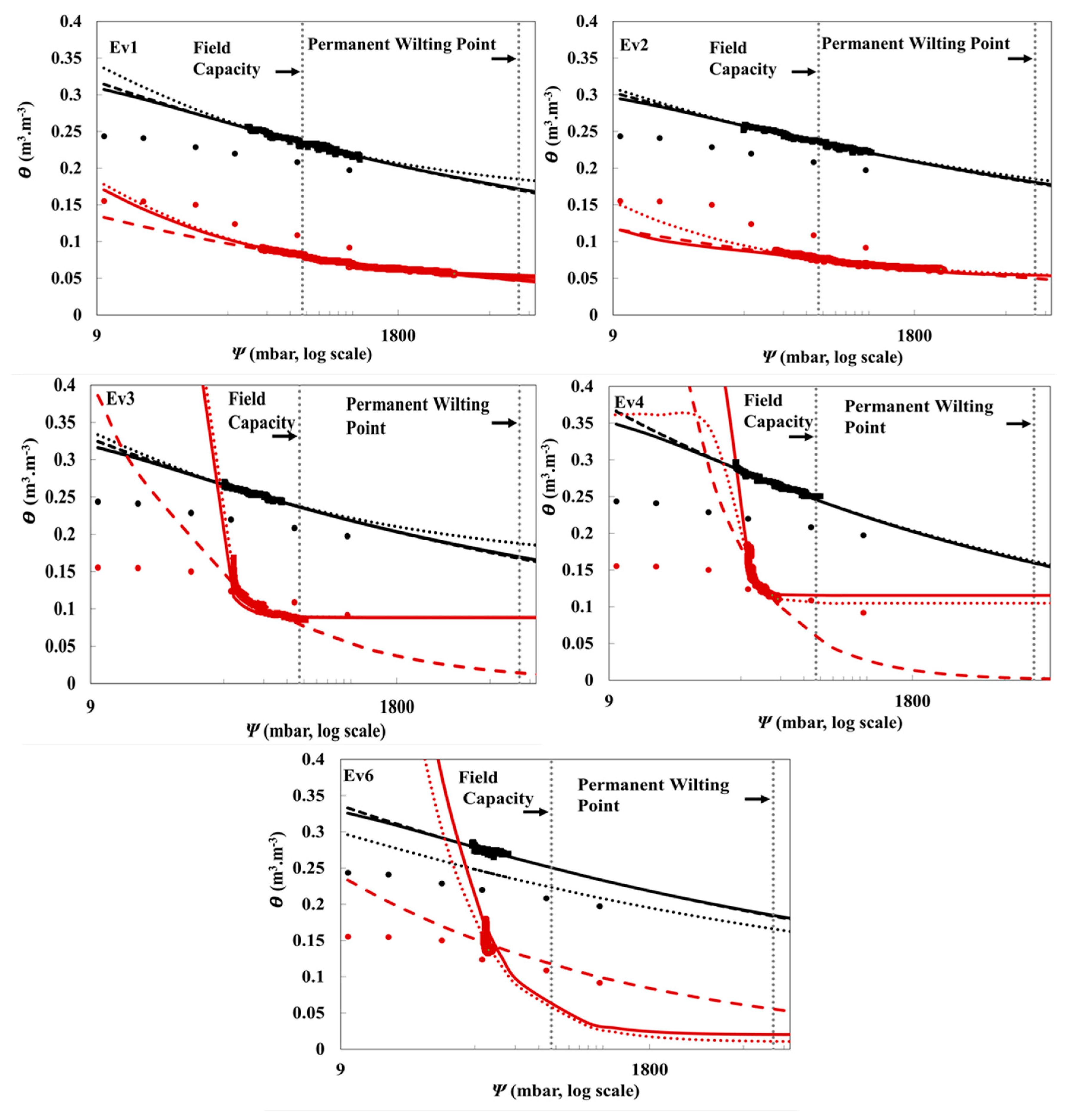
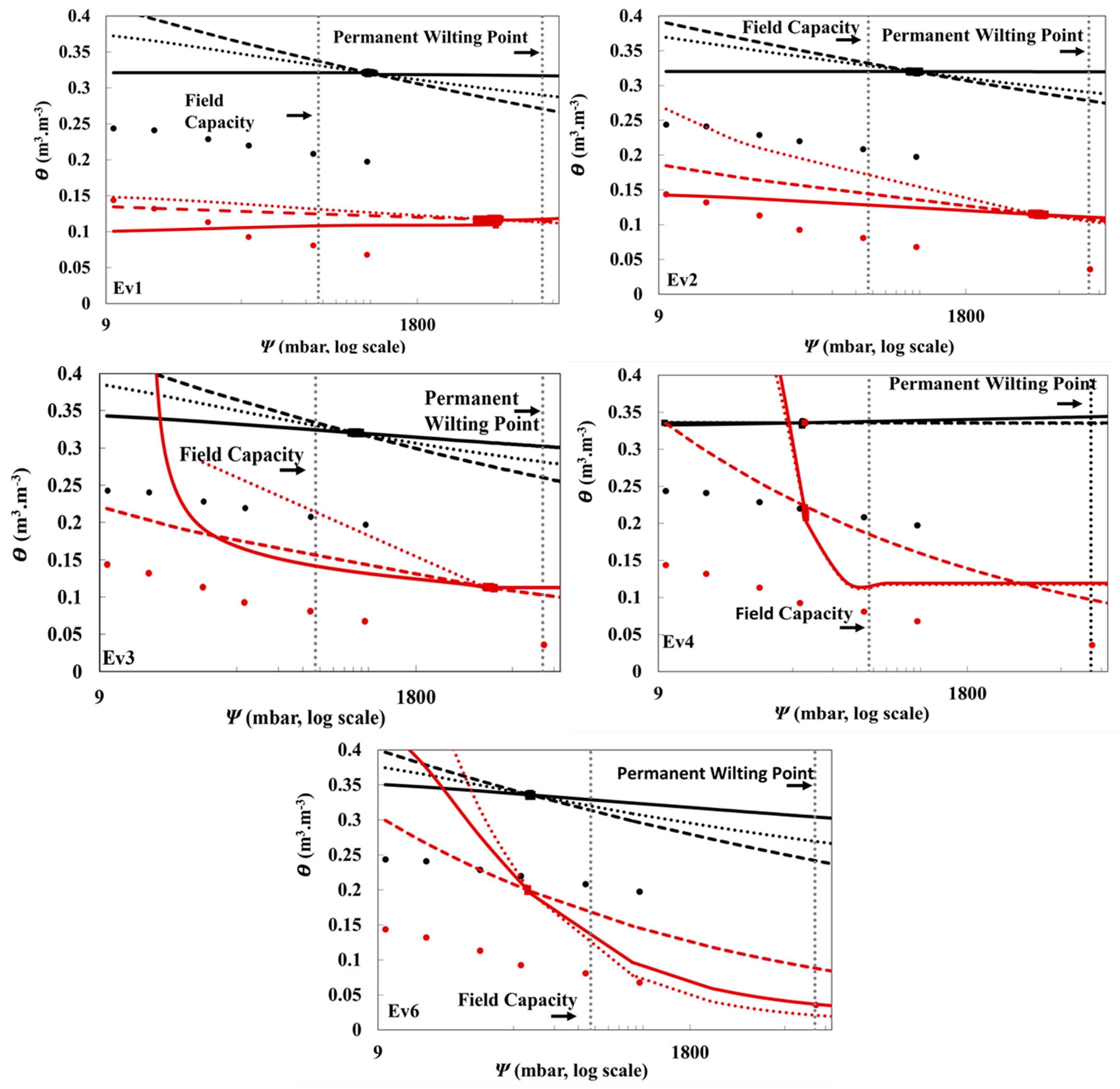
3.1. Field Data SWRC at Multiple Evapotranspiration Events
3.2. Fitting Performance of van Genuchten, Kosugi, and Campbell Parametric Models
3.3. Sensor Performance
3.4. Plant-Available Water
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ghanbarian, B.; Taslimitehrani, V.; Dong, G.; Pachepsky, Y.A. Sample dimensions effect on prediction of soil water retention curve and saturated hydraulic conductivity. J. Hydrol. 2015, 528, 127–137. [Google Scholar] [CrossRef]
- Burek, P.; Mubareka, S.; Rojas, R.; Roo, A.D.; Bianchi, A.; Baranzelli, C.; Lavalle, C.; Vandecasteele, I. Evaluation of the Effectiveness of Natural Water Retention Measures; JRC Scientific and Policy Report; European Union: Brussels, Belgium, 2012. [Google Scholar]
- Collentine, D.; Futter, M.N. Realising the potential of natural water retention measures in catchment flood management: Trade-offs and matching interests. Flood Risk Manag. 2018, 11, 76–84. [Google Scholar] [CrossRef]
- Bittelli, M.; Flury, M. Errors in Water Retention Curves Determined with Pressure Plates. Soil Sci. Soc. Am. J. 2009, 73, 1453–1460. [Google Scholar] [CrossRef]
- Ganjegunte, G.K.; Sheng, Z.; Clark, J.A. Evaluating the accuracy of soil water sensors for irrigation scheduling to conserve freshwater. Appl. Water Sci. 2012, 2, 119–125. [Google Scholar] [CrossRef]
- Kang, S.; Shi, W.; Hu, X.; Liang, Y.; Kang, S.; Shi, W.; Hu, X.; Liang, Y. Effects of regulated deficit irrigation on physiological indices and water use efficiency of maize. Trans. Chin. Soc. Agric. Eng. 1998, 14, 82–87. [Google Scholar]
- Wang, Y.; Zhang, Y.; Zhang, R.; Li, J.; Zhang, M.; Zhou, S.; Wang, Z. Reduced irrigation increases the water use efficiency and productivity of winter wheat-summer maize rotation on the North China Plain. Sci. Total Environ. 2018, 618, 112–120. [Google Scholar] [CrossRef] [PubMed]
- Barragan, J.; Cots, L.; Monserrat, J.; Lopez, R.; Wu, I. Water distribution uniformity and scheduling in micro-irrigation systems for water saving and environmental protection. Biosyst. Eng. 2010, 107, 202–211. [Google Scholar] [CrossRef]
- Broner, I. Irrigation Scheduling Fact Sheet 4.708; Colorado State University: Fort Collins, CO, USA, 2005. [Google Scholar]
- Brady, N.C.; Weil, R.R.; Weil, R.R. The Nature and Properties of Soils; Prentice Hall: Upper Saddle River, NJ, USA, 2008; Volume 13. [Google Scholar]
- Bagarello, V.; Iovino, M. Testing the BEST procedure to estimate the soil water retention curve. Geoderma 2012, 187–188, 67–76. [Google Scholar] [CrossRef]
- Cresswell, H.P.; Paydar, Z. Water retention in Australian soils. I. Description and prediction using parametric functions. Aust. J. Soil Res. 1996, 34, 195–212. [Google Scholar] [CrossRef]
- Morgan, K.T.; Parsons, L.R.; Wheaton, T.A. Comparison of laboratory- and field-derived soil water retention curves for a fine sand soil using tensiometric, resistance and capacitance methods. Plant Soil 2001, 234, 153–157. [Google Scholar] [CrossRef]
- Cresswell, H.; Coquet, Y.; Bruand, A.; McKenzie, N. The transferability of Australian pedotransfer functions for predicting water retention characteristics of French soils. Soil Use Manag. 2006, 22, 62–70. [Google Scholar] [CrossRef]
- Kosugi, K.I.; Hopmans, J.W.; Dane, J.H. 3.3.4 Parametric Models. In Methods of Soil Analysis: Part 4 Physical Methods; Dane, J.H., Topp, C.G., Eds.; Soil Science Society of America: Madison, WI, USA, 2002; Volume 5. [Google Scholar]
- Assouline, S.; Tessier, D.; Bruand, A. A conceptual model of the soil water retention curve. Water Resour. Res. 1998, 34, 223–231. [Google Scholar] [CrossRef]
- Hallema, D.W.; Périard, Y.; Lafond, J.A.; Gumiere, S.J.; Caron, J. Characterization of water retention curves for a series of cultivated Histosols. Vadose Zone J. 2015, 14, 1–8. [Google Scholar] [CrossRef]
- Van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef]
- Van Genuchten, R. Calculating the Unsaturated Hydraulic Conductivity with a New Closed-Form Analytical Model; Research Report No. 78-WR-08; Princeton University: Princeton, NJ, USA, 1978. [Google Scholar]
- Campbell, G.S. A simple method for determining unsaturated conductivity from moisture retention data. Soil Sci. 1974, 117, 311–314. [Google Scholar] [CrossRef]
- Genuchten, M.V.; Leij, F.; Yates, S. The RETC Code for Quantifying the Hydraulic Functions of Unsaturated Soils; Technical Report EPA/600/2-91/065; US Environmental Protection Agency: Washington, DC, USA, 1991.
- Groenevelt, P.; Grant, C. A new model for the soil-water retention curve that solves the problem of residual water contents. Eur. J. Soil Sci. 2004, 55, 479–485. [Google Scholar] [CrossRef]
- Shervin, H.; Farid, H.; Siamak, B.; Seth, E. Comparing the Applicability of Soil Water Retention Models. Int. J. Environ. Sci. Technol. 2016, 1, 114–118. [Google Scholar]
- Roy, D.; Jia, X.; Steele, D.D.; Lin, D. Development and comparison of soil water release curves for three soils in the red river valley. Soil Sci. Soc. Am. J. 2018, 82, 568–577. [Google Scholar] [CrossRef]
- Berliner, P.; Barak, P.; Chen, Y. An improved procedure for measuring water retention curves at low suction by the hanging-water-column method. Can. J. Soil Sci. 1980, 60, 591–594. [Google Scholar] [CrossRef]
- Baver, L.D.; Gardner, W.H.; Gardner, W.R. Soil Physics, 4th ed.; John Wiley and Sons, Inc.: New York, NY, USA, 1972. [Google Scholar]
- Steenpass, C.; Vanderborghta, J.; Herbsta, M.; Šimůnekb, J.; Vereeckena, H. Estimating Soil Hydraulic Properties from Infrared measurements of Soil Surface Temperatures and TDR Data. Vadoze Zone J. 2010, 9, 910–924. [Google Scholar] [CrossRef]
- Vellidis, G.; Tucker, M.; Perry, C.; Kvien, C.; Bednarz, C. A real-time wireless smart sensor array for scheduling irrigation. Comput. Electron. Agric. 2008, 61, 44–50. [Google Scholar] [CrossRef]
- Parvin, N.; Degré, A. Soil-specific calibration of capacitance sensors considering clay content and bulk density. Soil Res. 2016, 54, 111–119. [Google Scholar] [CrossRef]
- Archer, N.; Rawlins, B.; Marchant, B.; Mackay, J.; Meldrum, P. Approaches to calibrate in-situ capacitance soil moisture sensors and some of their implications. Soil Discuss 2016. [Google Scholar] [CrossRef]
- Fares, A.; Awal, R.; Bayabil, H.K. Soil water content sensor response to organic matter content under laboratory conditions. Sensors 2016, 16, 1239. [Google Scholar] [CrossRef] [PubMed]
- Mittelbach, H.; Lehner, I.; Seneviratne, S.I. Comparison of four soil moisture sensor types under field conditions in Switzerland. J. Hydrol. 2012, 430, 39–49. [Google Scholar] [CrossRef]
- Rudnick, D.R.; Djaman, K.; Irmak, S. Performance analysis of capacitance and electrical resistance-type soil moisture sensors in a silt loam soil. Trans. Asabe 2015, 58, 649–665. [Google Scholar]
- Rende, A.; Biage, M. Characterization of capacitive sensors for measurements of the moisture in irrigated soils. J. Braz. Soc. Mech. Sci. 2002, 24, 226–233. [Google Scholar] [CrossRef]
- Canadian Agricultural Services Coordinating Committee. The Canadian System of Soil Classification; NRC Research Press: Ottawa, ON, Canada, 1998. [Google Scholar]
- Kroetsch, D.; Wang, C. Particle Size Distribution. In Soil Sampling and Methods of Analysis, 2nd ed.; Carter, M.R., Gregorich, E., Eds.; CRC Press: Boca Raton, FL, USA, 2008; pp. 713–726. [Google Scholar]
- Hao, X.; Ball, B.; Culley, J.; Carter, M.; Parkin, G. Soil Density and Porosity. In Soil Sampling and Methods of Analysis, 2nd ed.; Carter, M.R., Gregorich, E.G., Eds.; CRC Press: Boca Raton, FL, USA, 2008; pp. 743–760. [Google Scholar]
- Genuchten, M.V.; Nielse, D. On describing and predicting the hydraulic properties of unsaturated soils. Ann. Geophys. 1985, 3, 615–628. [Google Scholar]
- Adamu, G.; Aliyu, A. Determination of the influence of texture and organic matter on soil water holding capacity in and around Tomas Irrigation Scheme, Dambatta Local Government Kano State. Res. J. Environ. Earth Sci. 2012, 4, 1038–1044. [Google Scholar]
- Wang, Z.; Feyen, J.; van Genuchten, M.T.; Nielsen, D.R. Air entrapment effects on infiltration rate and flow instability. Water Resour. Res. 1998, 34, 213–222. [Google Scholar] [CrossRef]
- FAO. Food and Agriculture Organization of the United Nations: Soil Permeability. Available online: http://www.fao.org/fishery/static/FAO_Training/FAO_Training/General/x6706e/x6706e09.htm (accessed on 24 April 2020).
- Kirkham, M.B. Chapter 10: Field Capacity, Wilting Point, Available Water, and the Nonlimiting Water Range. In Principles of Soil and Plant Water Relations; Kirkham, M.B., Ed.; Elsevier Inc.: Boston, MA, USA, 2014; pp. 153–170. [Google Scholar]
- Zotarelli, L.; Dukes, M.D.; Morgan, K.T. Interpretation of Soil Moisture Content to Determine Soil Field Capacity and Avoid Over-Irrigating Sandy Soils Using Soil Moisture Sensors; University of Florida Cooperation Extension Services Document No. AE 460; University of Florida: Gainesville, FL, USA, 2010. [Google Scholar]
- Corey, A.T. Measurement of water and air permeability in unsaturated soil. Soil Sci. Soc. Am. J. 1957, 21, 7–10. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Type | ||||||
|---|---|---|---|---|---|---|
| Soil Property | Elora, Ontario Soil | Cambridge, Ontario Soil | ||||
| Mineral soil horizons | Ap | Bt | Ck | Ap | Btj | Ck |
| Horizon depth (cm) | 0–32 * | 32–61 # | 61+ | 0–28 § | 28–55 ʈ | 55 + |
| Horizon thickness (cm) | 20–34 * | 20–30 # | - | 20–31 § | 15–90 ʈ | - |
| Sand (%) | 38.0 ¶ | 44.7 ¶ | 49.4 ¶ | 79.2 ‡ | 82.0 ‡ | 88.8 ‡ |
| Silt (%) | 54.5 ¶ | 40.3 ¶ | 38.1 ¶ | 17.5 ‡ | 13 ‡ | 8.7 ‡ |
| Clay (%) | 7.5 ¶ | 15.0 ¶ | 12.5 ¶ | 3.3 ‡ | 5.0 ‡ | 2.5 ‡ |
| Textural class | silt loam | loam | loam | loamy sand | loamy sand | sand |
| Bulk density (g cm−3) | 1.53 ± 0.12 | 1.71 ± 0.08 | 1.78 ± 0.11 | 1.71 ± 0.11 | 1.68 ± 0.09 | 1.64 ± 0.07 |
| Event# | Van Genuchuten | Kosugi | Campbell | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| θr (m3m−3) | θs (m3m−3) | ∝ (cm−1) | n | θr (m3m−3) | θs (m3m−3) | ψi (mbar) | n | ψma (mbar) | θs (m3m−3) | λ | |
| Silt loam (5 cm) | |||||||||||
| Ev1 | 0.04 | 0.33 | 0.16 | 1.10 | 0.15 | 0.42 | 0.61 | 1.24 | 0.03 | 0.51 | 0.08 |
| Ev2 | 0.04 | 0.32 | 0.17 | 1.09 | 0.10 | 0.43 | 0.03 | 1.12 | 0.02 | 0.46 | 0.07 |
| Ev3 | 0.04 | 0.34 | 0.15 | 1.11 | 0.15 | 0.41 | 0.58 | 1.22 | 0.03 | 0.55 | 0.09 |
| Ev4 | 0.04 | 0.32 | 0.17 | 1.04 | 0.14 | 0.42 | 0.59 | 1.18 | 0.03 | 0.54 | 0.08 |
| Ev6 | 0.04 | 0.35 | 0.17 | 1.10 | 0.14 | 0.39 | 0.58 | 1.18 | 0.03 | 0.54 | 0.08 |
| Loamy sand (5 cm) | |||||||||||
| Ev1 | 0.04 | 0.27 | 0.48 | 1.35 | 0.04 | 0.25 | 1.65 | 1.40 | 0.03 | 0.31 | 0.14 |
| Ev2 | 0.05 | 0.13 | 0.06 | 1.34 | 0.05 | 0.51 | 0.05 | 1.36 | 0.10 | 0.20 | 0.12 |
| Ev3 | 0.09 | 0.99 | 0.02 | 4.50 | 0.09 | 0.99 | 46.15 | 4.50 | 1.29 | 0.99 | 0.45 |
| Ev4 | 0.12 | 0.52 | 0.01 | 9.26 | 0.10 | 0.36 | 76.21 | 5.89 | 12.40 | 0.99 | 0.86 |
| Ev6 | 0.02 | 0.99 | 0.04 | 2.26 | 0.01 | 0.99 | 12.28 | 2.05 | 0.04 | 0.70 | 0.20 |
| Silt loam (30 cm) | |||||||||||
| Ev1 | 0.04 | 0.33 | 0.16 | 1.00 | 0.16 | 0.39 | 0.60 | 1.07 | 0.03 | 0.58 | 0.04 |
| Ev2 | 0.04 | 0.32 | 0.17 | 1.00 | 0.10 | 0.41 | 0.03 | 1.05 | 0.02 | 0.52 | 0.04 |
| Ev3 | 0.04 | 0.35 | 0.15 | 1.02 | 0.16 | 0.40 | 0.59 | 1.09 | 0.03 | 0.61 | 0.04 |
| Ev4 | 0.04 | 0.31 | 0.17 | 0.99 | 0.14 | 0.41 | 0.59 | 1.12 | 0.03 | 0.55 | 0.04 |
| Ev6 | 0.04 | 0.36 | 0.17 | 1.02 | 0.14 | 0.39 | 0.58 | 1.09 | 0.03 | 0.59 | 0.04 |
| Loamy sand (30 cm) | |||||||||||
| Ev1 | 0.04 | 0.10 | 0.60 | 0.96 | 0.07 | 0.15 | 1.69 | 1.09 | 0.02 | 0.15 | 0.04 |
| Ev2 | 0.05 | 0.15 | 0.06 | 1.07 | 0.05 | 0.48 | 0.05 | 1.19 | 0.10 | 0.26 | 0.05 |
| Ev3 | 0.11 | 0.50 | 0.03 | 4.48 | 0.11 | 0.99 | 30.81 | 4.47 | 0.19 | 0.33 | 0.11 |
| Ev4 | 0.12 | 0.51 | 0.01 | 8.52 | 0.12 | 0.47 | 96.23 | 8.68 | 0.04 | 0.86 | 0.17 |
| Ev6 | 0.02 | 0.49 | 0.06 | 1.49 | 0.01 | 0.86 | 5.01 | 1.59 | 0.04 | 0.75 | 0.02 |
| Soil Type (Depth) | Model Parameters | |||||||
|---|---|---|---|---|---|---|---|---|
| van Genuchuten | ||||||||
| θr (m3m−3) | RSD (%) | θs (m3m−3) | RSD (%) | ∝ (cm−1) | RSD (%) | n | RSD (%) | |
| Silt loam (5 cm) | 0.04 | 0.00 | 0.33 | 3.93 | 0.16 | 5.45 | 1.09 | 2.55 |
| Loamy sand (5 cm) | 0.06 | 64.08 | 0.58 | 68.88 | 0.12 | 164.79 | 3.74 | 89.34 |
| Silt loam (30 cm) | 0.04 | 0.00 | 0.33 | 6.21 | 0.16 | 5.45 | 1.01 | 1.33 |
| Loamy sand (30 cm) | 0.07 | 65.27 | 0.35 | 58.94 | 0.15 | 165.35 | 3.30 | 98.50 |
| Kosugi | ||||||||
| θr (m3m−3) | RSD (%) | θs (m3m−3) | RSD (%) | Ψi (mbar) | RSD (%) | n | RSD (%) | |
| Silt loam (5 cm) | 0.14 | 15.25 | 0.41 | 3.66 | 0.48 | 52.46 | 1.19 | 3.88 |
| Loamy sand (5 cm) | 0.06 | 63.82 | 0.62 | 56.47 | 27.27 | 121.27 | 3.04 | 67.31 |
| Silt loam (30 cm) | 0.14 | 17.50 | 0.40 | 2.50 | 0.48 | 52.41 | 1.08 | 2.41 |
| Loamy sand (30 cm) | 0.07 | 62.42 | 0.59 | 57.04 | 26.76 | 152.47 | 3.40 | 95.78 |
| Campbell | ||||||||
| ψma (mbar) | RSD (%) | θs (m3m−3) | RSD (%) | λ | RSD (%) | |||
| Silt loam (5 cm) | 0.03 | 15.97 | 0.52 | 7.07 | 0.08 | 8.84 | ||
| Loamy sand (5 cm) | 2.77 | 195.12 | 0.64 | 58.18 | 0.35 | 88.15 | ||
| Silt loam (30 cm) | 0.03 | 15.97 | 0.57 | 6.20 | 0.04 | 0.00 | ||
| Loamy sand (30 cm) | 0.08 | 89.01 | 0.47 | 67.00 | 0.08 | 78.72 | ||
| Event# | ψ Mean (mbar) | ψ Max (mbar) | ψ Min (mbar) | σ * (mbar) | θ Mean (m3m−3) | θ Max (m3m−3) | θ Min (m3m−3) | σ * (m3m−3) |
|---|---|---|---|---|---|---|---|---|
| Silt loam (5 cm) | ||||||||
| Ev1 | 410 | 918 | 127 | 202 | 0.233 | 0.256 | 0.211 | 0.010 |
| Ev2 | 403 | 847 | 51.0 | 180 | 0.234 | 0.259 | 0.221 | 0.009 |
| Ev3 | 161 | 247 | 91 | 42.9 | 0.254 | 0.269 | 0.243 | 0.007 |
| Ev4 | 144 | 360 | 82 | 63.9 | 0.273 | 0.298 | 0.250 | 0.012 |
| Ev6 | 111 | 160 | 86 | 15.4 | 0.274 | 0.286 | 0.265 | 0.004 |
| Loamy sand (5 cm) | ||||||||
| Ev1 | 1487 | 4845 | 162 | 1360 | 0.070 | 0.092 | 0.055 | 0.010 |
| Ev2 | 1123 | 3000 | 157 | 859 | 0.070 | 0.088 | 0.059 | 0.007 |
| Ev3 | 188 | 291 | 107 | 61.7 | 0.106 | 0.168 | 0.087 | 0.019 |
| Ev4 | 120 | 171 | 100 | 20.2 | 0.142 | 0.184 | 0.110 | 0.020 |
| Ev6 | 111 | 121 | 105 | 3.81 | 0.146 | 0.179 | 0.133 | 0.011 |
| Silt loam (30 cm) | ||||||||
| Ev1 | 782 | 877 | 722 | 39.9 | 0.321 | 0.323 | 0.319 | 0.001 |
| Ev2 | 739 | 815 | 102 | 52.4 | 0.319 | 0.322 | 0.249 | 0.005 |
| Ev3 | 661 | 715 | 102 | 41.3 | 0.320 | 0.322 | 0.249 | 0.004 |
| Ev4 | 107 | 111 | 10.0 | 4.22 | 0.335 | 0.338 | 0.249 | 0.004 |
| Ev6 | 120 | 124 | 102 | 2.16 | 0.335 | 0.338 | 0.249 | 0.004 |
| Loamy sand (30 cm) | ||||||||
| Ev1 | 6296 | 7424 | 4862 | 672 | 0.116 | 0.118 | 0.115 | 0.002 |
| Ev2 | 6414 | 7107 | 5500 | 333 | 0.114 | 0.117 | 0.112 | 0.001 |
| Ev3 | 6219 | 6704 | 5750 | 241 | 0.112 | 0.115 | 0.111 | 0.001 |
| Ev4 | 112 | 113 | 111 | 0.799 | 0.215 | 0.336 | 0.207 | 0.006 |
| Ev6 | 115 | 115 | 114 | 0.281 | 0.199 | 0.202 | 0.197 | 0.001 |
| Van Genuchten | Kosugi | Campbell | ||||
|---|---|---|---|---|---|---|
| Event# | RMSE (%) | R2 | RMSE (%) | R2 | RMSE (%) | R2 |
| Silt loam (5 cm) | ||||||
| Ev1 | 0.19 | 0.97 | 0.18 | 0.97 | 0.19 | 0.97 |
| Ev2 | 0.15 | 0.98 | 0.15 | 0.98 | 0.15 | 0.98 |
| Ev3 | 0.12 | 0.97 | 0.11 | 0.97 | 0.12 | 0.97 |
| Ev4 | 0.33 | 0.94 | 0.33 | 0.94 | 0.33 | 0.95 |
| Ev6 | 0.21 | 0.68 | 3.01 | 0.68 | 0.21 | 0.68 |
| Loamy sand (5 cm) | ||||||
| Ev1 | 0.13 | 0.98 | 0.13 | 0.98 | 0.17 | 0.97 |
| Ev2 | 0.11 | 0.97 | 0.11 | 0.98 | 0.17 | 0.95 |
| Ev3 | 0.11 | 0.50 | 0.47 | 0.93 | 0.80 | 0.81 |
| Ev4 | 0.95 | 0.84 | 1.02 | 0.82 | 1.10 | 0.74 |
| Ev6 | 2.26 | 0.22 | 1.16 | 0.23 | 1.22 | 0.09 |
| Silt loam (30 cm) | ||||||
| Ev1 | 0.06 | 0.02 | 0.08 | 0.03 | 0.03 | 0.03 |
| Ev2 | 0.61 | 0.42 | 0.71 | 0.42 | 0.75 | 0.43 |
| Ev3 | 0.56 | 0.60 | 0.65 | 0.61 | 0.72 | 0.61 |
| Ev4 | 0.45 | 0.00 | 0.45 | 0.00 | 0.45 | 0.00 |
| Ev6 | 0.45 | 0.10 | 0.46 | 0.10 | 0.47 | 0.10 |
| Loamy sand (30 cm) | ||||||
| Ev1 | 0.10 | 0.21 | 0.15 | 0.35 | 0.14 | 0.34 |
| Ev2 | 0.11 | 0.12 | 0.11 | 0.19 | 0.10 | 0.19 |
| Ev3 | 0.07 | 0.98 | 0.07 | 0.98 | 0.15 | 0.99 |
| Ev4 | 0.16 | 0.95 | 0.16 | 0.95 | 0.41 | 0.53 |
| Ev6 | 0.14 | 0.11 | 0.28 | 0.11 | 0.52 | 0.11 |
| Silt Loam | Loamy Sand | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| SWRT Model | RMSEL (%) | rL | Md (m3m−3) | m + | b + | RMSEL (%) | rL | Md (m3m−3) | m + | b + |
| 5 cm depth | ||||||||||
| van Genuchten | 4.78 | 0.99 | 0.05 | 1.65 | −0.10 | 7.56 | 0.55 | −0.03 | 1.84 | −0.13 |
| Kosugi | 6.19 | 0.98 | 0.06 | 2.22 | −0.22 | 24.5 | 0.85 | 0.14 | 7.70 | −0.73 |
| Campbell | 5.79 | 0.99 | 0.05 | 1.95 | −0.16 | 12.8 | 0.91 | 0.09 | 4.04 | −0.30 |
| 30 cm depth | ||||||||||
| van Genuchten | 14.97 | 0.92 | 0.15 | 0.17 | 0.29 | 2.65 | 0.69 | −0.02 | 0.61 | 0.03 |
| Kosugi | 16.48 | 0.92 | 0.16 | 1.10 | 0.19 | 0.11 | 0.86 | 0.15 | 5.05 | −0.25 |
| Campbell | 23.06 | 0.94 | 0.23 | 1.19 | 0.14 | 2.01 | 0.99 | 0.17 | 1.27 | 0.13 |
| PAW (cm) | ||||
|---|---|---|---|---|
| Event# | Silt Loam (5 cm) | Loamy Sand (5 cm) | Silt Loam (30 cm) | Loamy Sand (30 cm) |
| Ev1 | 0.32 | 0.14 | 0.15 | NA |
| Ev2 | 0.27 | 0.11 | 0.03 | 0.51 |
| Ev3 | 0.34 | 0.28 × 10−2 | 0.66 | 0.39 × 10−2 |
| Ev4 | 0.43 | 1.73 × 10−5 | 0.18 | 0.10 × 10−2 |
| Ev6 | 0.33 | 0.18 | 0.75 | 2.75 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeitoun, R.; Vandergeest, M.; Vasava, H.B.; Machado, P.V.F.; Jordan, S.; Parkin, G.; Wagner-Riddle, C.; Biswas, A. In-Situ Estimation of Soil Water Retention Curve in Silt Loam and Loamy Sand Soils at Different Soil Depths. Sensors 2021, 21, 447. https://doi.org/10.3390/s21020447
Zeitoun R, Vandergeest M, Vasava HB, Machado PVF, Jordan S, Parkin G, Wagner-Riddle C, Biswas A. In-Situ Estimation of Soil Water Retention Curve in Silt Loam and Loamy Sand Soils at Different Soil Depths. Sensors. 2021; 21(2):447. https://doi.org/10.3390/s21020447
Chicago/Turabian StyleZeitoun, Reem, Mark Vandergeest, Hiteshkumar Bhogilal Vasava, Pedro Vitor Ferrari Machado, Sean Jordan, Gary Parkin, Claudia Wagner-Riddle, and Asim Biswas. 2021. "In-Situ Estimation of Soil Water Retention Curve in Silt Loam and Loamy Sand Soils at Different Soil Depths" Sensors 21, no. 2: 447. https://doi.org/10.3390/s21020447
APA StyleZeitoun, R., Vandergeest, M., Vasava, H. B., Machado, P. V. F., Jordan, S., Parkin, G., Wagner-Riddle, C., & Biswas, A. (2021). In-Situ Estimation of Soil Water Retention Curve in Silt Loam and Loamy Sand Soils at Different Soil Depths. Sensors, 21(2), 447. https://doi.org/10.3390/s21020447