A PAPR Reduction Technique for Fast Touch Sensors Adopting a Multiple Frequency Driving Method on Large Display Panels




Abstract
1. Introduction
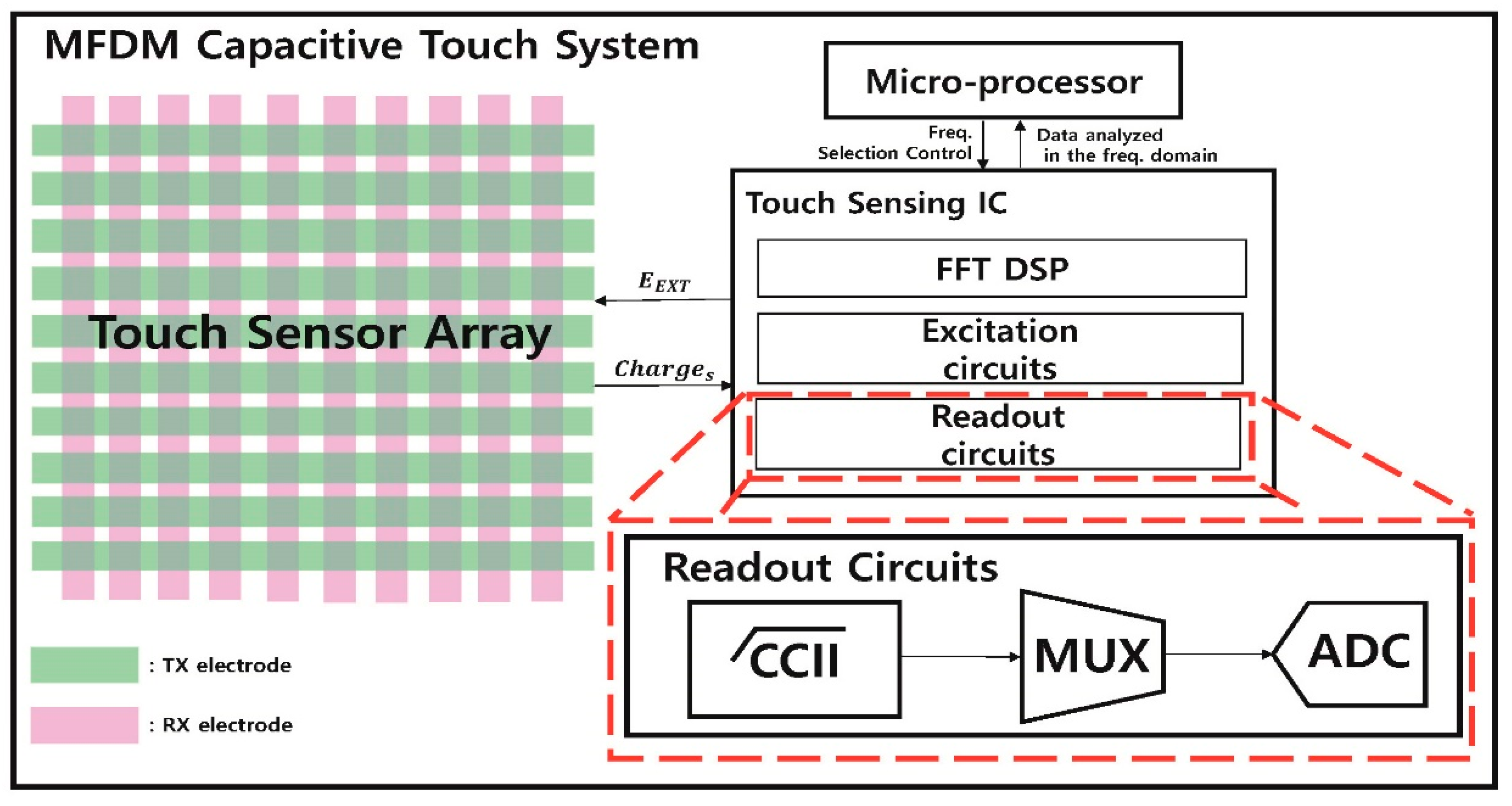
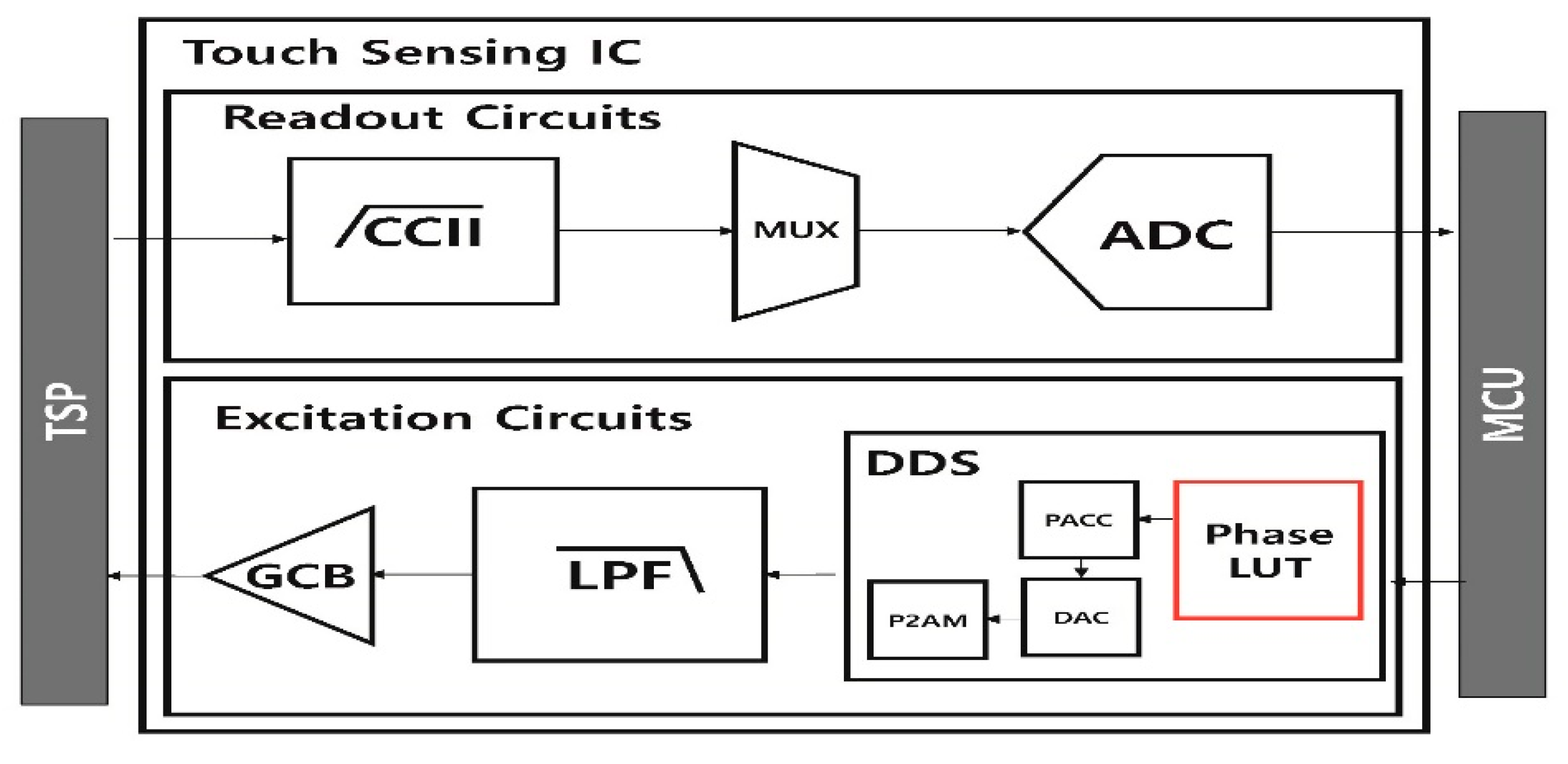
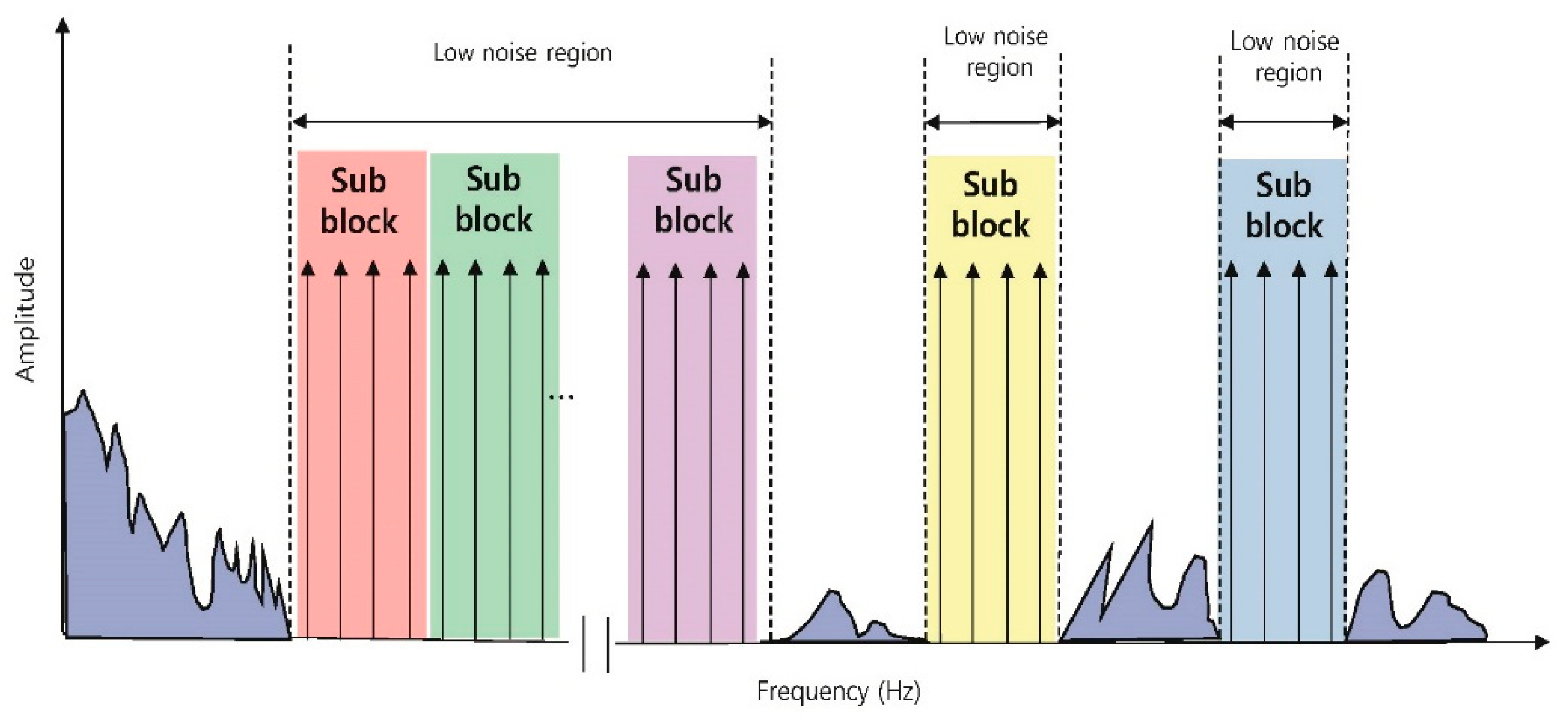
1.1. System Overview of MFDM
1.2. The PAPR Reduction Method in the Communications System
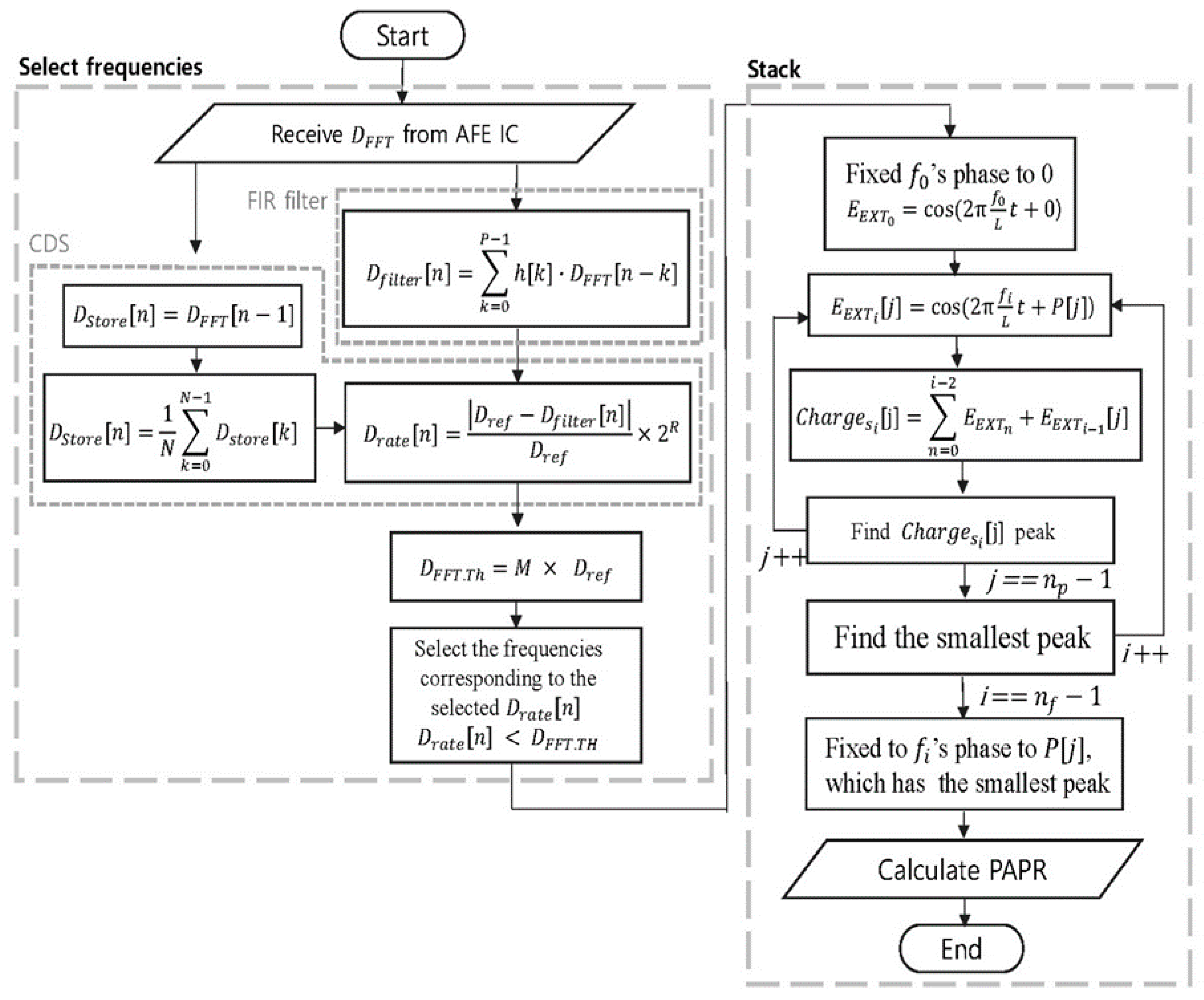
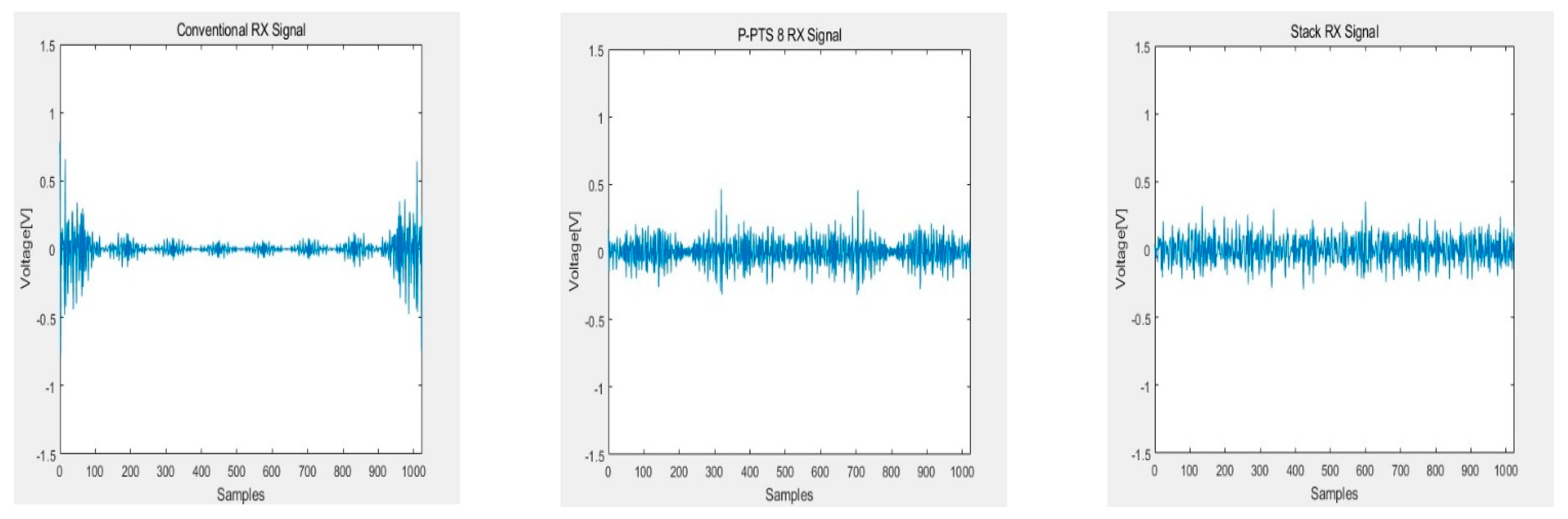
2. The PAPR Reduction Method about Stack
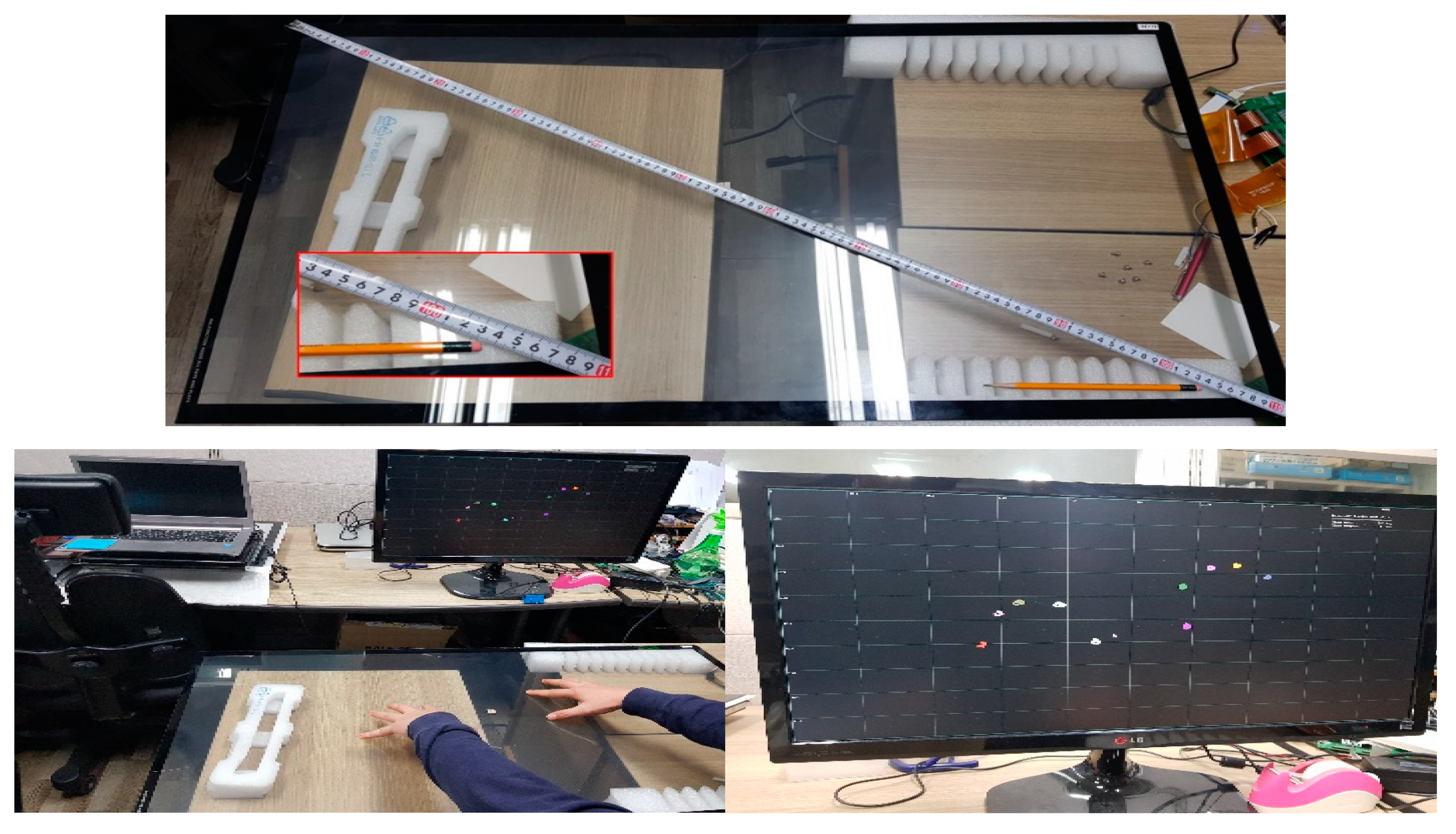
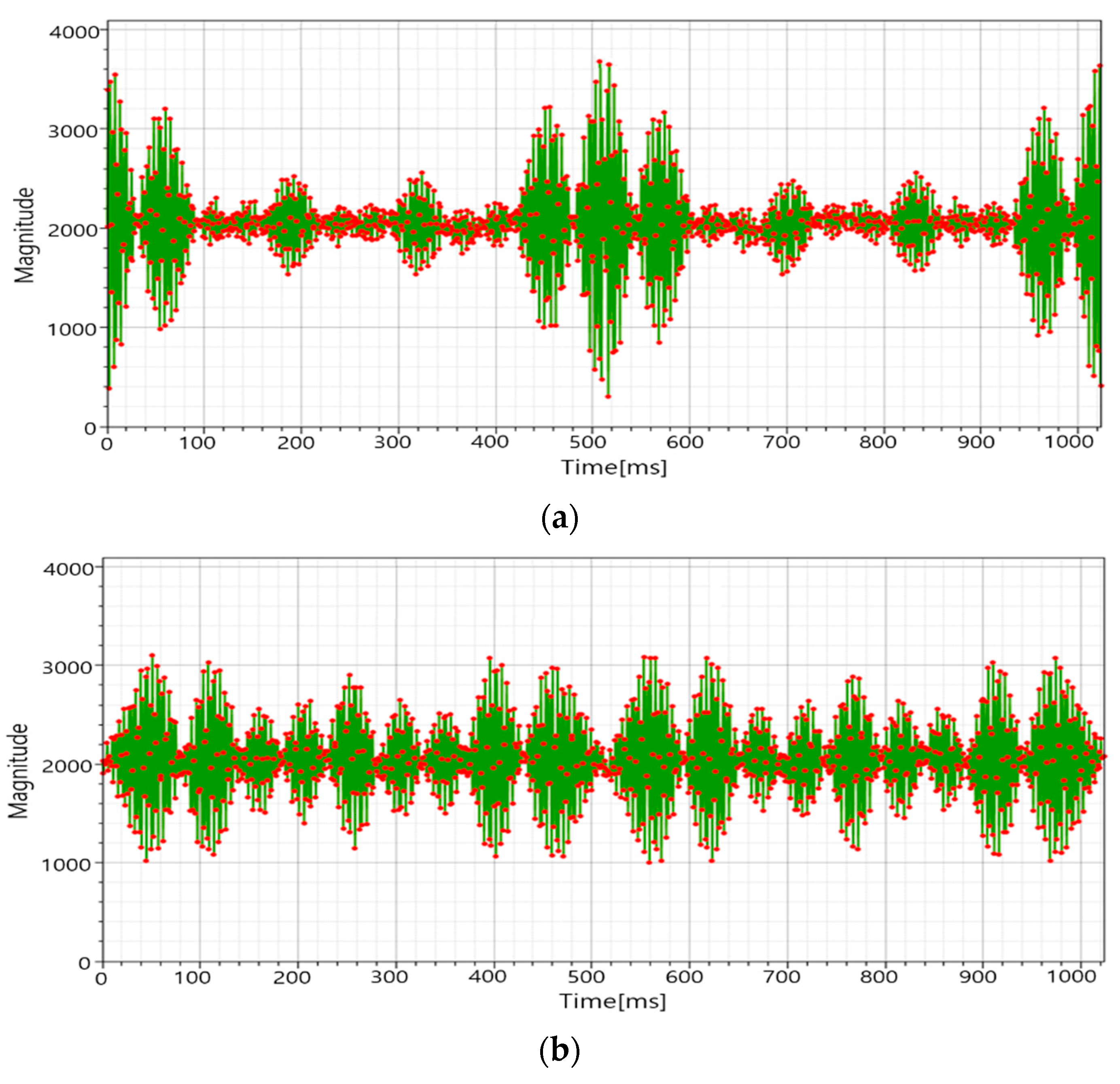
3. Experimental Result
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gillespie, D.W.; Trent, R.A.; Hsu, A.C.; Grate, L.R. Touch Screen with User Interface Enhancement. U.S. Patent No. 7,730,401, 1 June 2010. [Google Scholar]
- Chakraborty, P.; Shah, A. Interactive Touch Screen Using Augmented Reality. In Proceedings of the 2018 4th International Conference on Applied and Theoretical Computing and Communication Technology (iCATccT), Mangalore, India, 6–8 September 2018; pp. 294–298. [Google Scholar]
- Hong, J.; Baek, S.; Jung, H.; Kwon, Y. Usability Analysis of Touch Screen for Ground Operators. J. Comput. Commun. 2015, 3, 133. [Google Scholar] [CrossRef][Green Version]
- Redmayne, D.V. Capacitive Touch Sensor. U.S. Patent No. 5,650,597, 22 July 1997. [Google Scholar]
- Barrett, G.; Omote, R. Projected-Capacitive Touch Technology. Inf. Disp. 2010, 26, 16–21. [Google Scholar] [CrossRef]
- Hamaguchi, M.; Takeda, M.; Miyamoto, M. 6.6 A 240 Hz-Reporting-Rate Mutual-Capacitance Touch-Sensing Analog Front-End Enabling Multiple Active/Passive Styluses with 41 dB/32 dB SNR for 0.5 mm Diameter. In Proceedings of the 2015 IEEE International Solid-State Circuits Conference—(ISSCC) Digest of Technical Papers, San Francisco, CA, USA, 22–26 February 2015; pp. 1–3. [Google Scholar]
- Miyamoto, M.; Hamaguchi, M.; Nagao, A. A 143× 81 Mutual-Capacitance Touch-Sensing Analog Front-End With Parallel Drive and Differential Sensing Architecture. IEEE J. Solid State Circ. 2014, 50, 335–343. [Google Scholar] [CrossRef]
- Shin, H.H.; Ko, S.S.; Jang, H.H.; Yun, I.I.; Lee, K.K. A 55 dB SNR with 240 Hz Frame Scan Rate Mutual Capacitor 30×24 Touch-Screen Panel Read-out IC Using Code-Division Multiple Sensing Technique. In Proceedings of the 2013 IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 17–21 February 2013; pp. 388–389. [Google Scholar]
- An, J.S.; Han, S.H.; Kim, J.E.; Yoon, D.H.; Kim, Y.H.; Hong, H.H.; Ye, J.H.; Jung, S.J.; Lee, S.H.; Jeong, J.Y.; et al. A 3.9 kHz-Frame-Rate Capacitive Touch System with Pressure/Tilt Angle Expressions of Active Stylus Using Multiple-Frequency Driving Method for 65 104 x 64 Touch Screen Panel. In Proceedings of the 2017 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017; pp. 168–169. [Google Scholar]
- Kwon, O.-K.; An, J.-S.; Hong, S.-K. Capacitive Touch Systems with Styli for Touch Sensors: A Review. IEEE Sens. J. 2018, 18, 4832–4846. [Google Scholar] [CrossRef]
- An, J.-S.; Han, S.-H.; Kim, J.E.; Yoon, D.-H.; Kim, Y.H.; Hong, H.-H.; Ye, J.-H.; Jung, S.-J.; Lee, S.-H.; Jeong, J.-Y.; et al. A 3.9-kHz Frame Rate and 61.0-dB SNR Analog Front-End IC with 6-bit Pressure and Tilt Angle Expressions of Active Stylus Using Multiple-Frequency Driving Method for Capacitive Touch Screen Panels. IEEE J. Solid-State Circ. 2017, 53, 187–203. [Google Scholar] [CrossRef]
- An, J.-S.; Ra, J.-H.; Kang, E.; Pertijs, M.A.P.; Han, S.-H. 28.1 A Capacitive Touch Chipset with 33.9 dB Charge-Overflow Reduction Using Amplitude-Modulated Multi-Frequency Excitation and Wireless Power and Data Transfer to an Active Stylus. In Proceedings of the 2020 IEEE International Solid-State Circuits Conference-(ISSCC), San Francisco, CA, USA, 16–20 February 2020; pp. 430–432. [Google Scholar]
- Wulich, D. Definition of efficient PAPR in OFDM. IEEE Commun. Lett. 2005, 9, 832–834. [Google Scholar] [CrossRef]
- Wang, B.; Adali, T. Joint Impulse Responses Shortening for Discrete Multitone Systems. In Proceedings of the Seamless Interconnection for Universal Services. Global Telecommunications Conference, Rio De Janeiro, Brazil, 5–9 December 1999. [Google Scholar]
- Shawqi, F.S.; Audah, L.; Hammoodi, A.T.; Hamdi, M.M.; Mohammed, A.H. A Review of PAPR Reduction Techniques for UFMC Waveform. In Proceedings of the 2020 4th International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Istanbul, Turkey, 22–24 October 2020. [Google Scholar]
- Al-Rayif, M.I.; Seleem, H.E.; Ragheb, A.M.; Alshebeili, S.A. PAPR Reduction in UFMC for 5G Cellular Systems. Electron 2020, 9, 1404. [Google Scholar] [CrossRef]
- Mishra, P.; Amin, M.U. PAPR reduction in OFDM using various coding techniques. Int. J. Wirel. Mob. Comput. 2018, 15, 16–20. [Google Scholar] [CrossRef]
- Kumar, P.; Ahuja, A.K.; Chakka, R. BCH/Hamming/Cyclic Coding Techniques: Comparison of PAPR-Reduction Performance in OFDM Systems; International Conference on Intelligent Computing and Application; Springer: Singapore, 2018. [Google Scholar]
- Pamungkasari, P.D.; Shubhi, I.; Juwono, F.H.; Mariyam, P.D.; Gunawan, D. Time domain cyclic selective mapping for PAPR reduction in MIMO-OFDM systems. In Proceedings of the 2018 IEEE International Conference on Innovative Research and Development (ICIRD), Bangkok, Thailand, 11–12 May 2018. [Google Scholar]
- Cuteanu, V.; Isar, A. PAPR Reduction of OFDM Signals Using Selective Mapping and Clipping Hybrid Scheme. In Proceedings of the 2012 20th European Signal Processing Conference (EUSIPCO), Bucharest, Romania, 27–31 August 2012. [Google Scholar]
- Jawhar, Y.A.; Audah, L.; Taher, M.A.; Ramli, K.N.; Shah, N.S.M.; Musa, M.; Ahmed, M.S. A Review of Partial Transmit Sequence for PAPR Reduction in the OFDM Systems. IEEE Access 2019, 7, 18021–18041. [Google Scholar] [CrossRef]
- Han, S.H.; Lee, J.H. An overview of peak-to-average power ratio reduction techniques for multicarrier transmission. IEEE Wirel. Commun. 2005, 12, 56–65. [Google Scholar] [CrossRef]
- Chen-Hu, K.; Céspedes, M.M.; Armada, A.G. OFDM-Based Multicarrier Transmission. In Wiley 5G Ref: The Essential 5G Reference Online; Wiley: New York, NY, USA, 2019; pp. 1–23. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lists | Values |
|---|---|
| ADC sampling rates | 3 MHZ |
| FFT points | 1024 |
| Bandwidth | 150 KHz ~ 1 MHz |
| Number of TX | 64 |
| Clock | 100 MHz |
| Number of simulations | 100,000,000 |
| Method | |||||
|---|---|---|---|---|---|
| Stack | |||||
| Number of Phases ( | 8 | 16 | 32 | 64 | 128 |
| Average PAPR () | 7.90 | 7.33 | 6.98 | 6.76 | 6.65 |
| Maximum PAPR () | 16.35 | 13.11 | 12.05 | 11.19 | 10.49 |
| Time () | 0.0299 | 0.0504 | 0.0990 | 0.1939 | 0.3830 |
| PAPR-time performance ( | 3.86 | 4.84 | 8.33 | 14.67 | 26.72 |
| Method | Simulation Parameters | Computational Complexity (Times) | MaxPAPR | AvgPAPR | |
|---|---|---|---|---|---|
| P-PTS | = 288, = 64, = 2, = 8 | 9216 | 21.90 | 11.62 | |
| Stack (proposed) | = 288, = 64, = 16 | 1008 | 13.11 | 7.33 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, P.; Han, S.; Jung, Y.; Lee, S. A PAPR Reduction Technique for Fast Touch Sensors Adopting a Multiple Frequency Driving Method on Large Display Panels. Sensors 2021, 21, 429. https://doi.org/10.3390/s21020429
Kim P, Han S, Jung Y, Lee S. A PAPR Reduction Technique for Fast Touch Sensors Adopting a Multiple Frequency Driving Method on Large Display Panels. Sensors. 2021; 21(2):429. https://doi.org/10.3390/s21020429
Chicago/Turabian StyleKim, Piljoong, Sanghyun Han, Yunho Jung, and Seongjoo Lee. 2021. "A PAPR Reduction Technique for Fast Touch Sensors Adopting a Multiple Frequency Driving Method on Large Display Panels" Sensors 21, no. 2: 429. https://doi.org/10.3390/s21020429
APA StyleKim, P., Han, S., Jung, Y., & Lee, S. (2021). A PAPR Reduction Technique for Fast Touch Sensors Adopting a Multiple Frequency Driving Method on Large Display Panels. Sensors, 21(2), 429. https://doi.org/10.3390/s21020429