
A Frequency-Programmable Miniaturized Radio Frequency Transmitter for Animal Tracking


Abstract
:1. Introduction
2. Materials and Methods
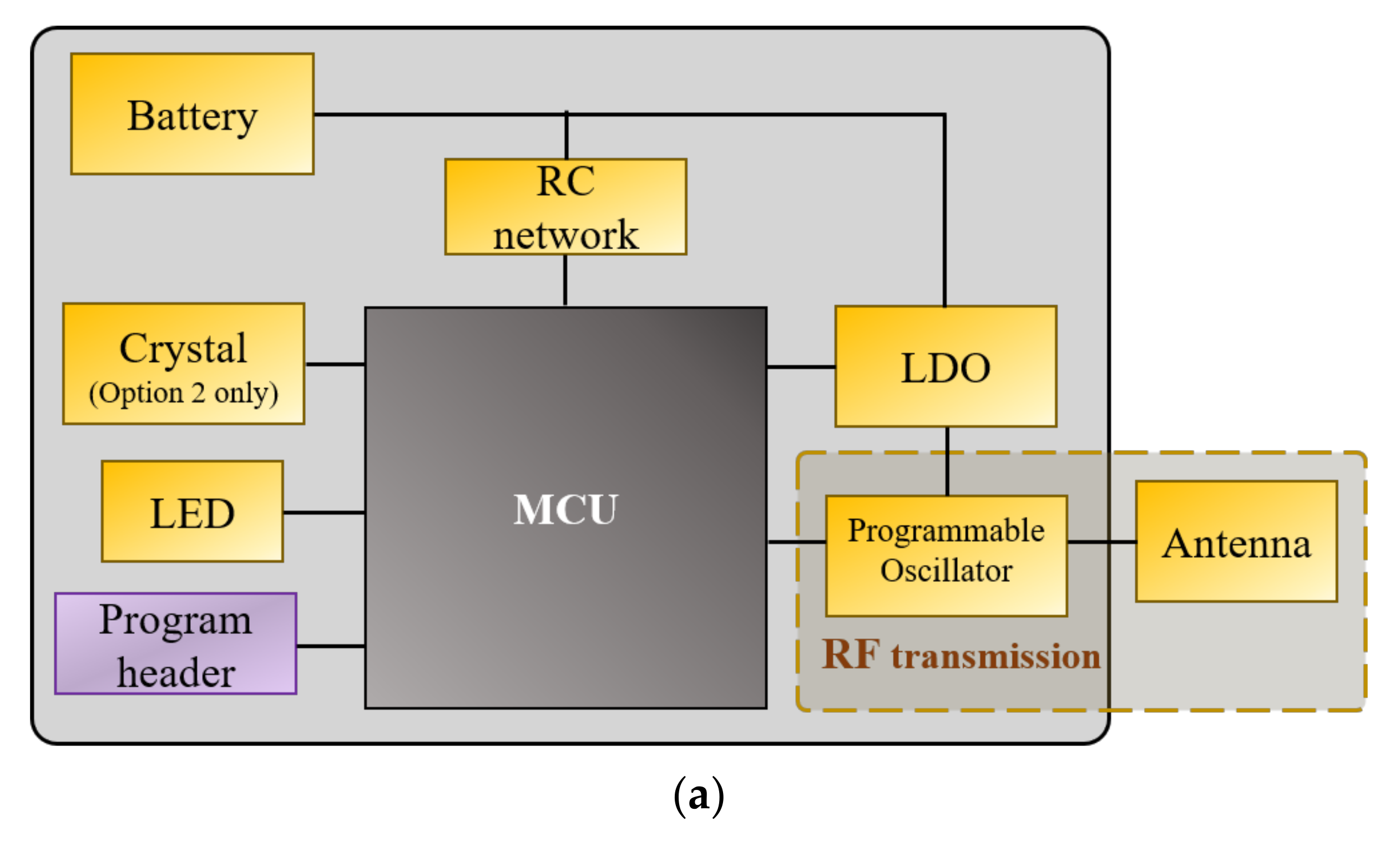
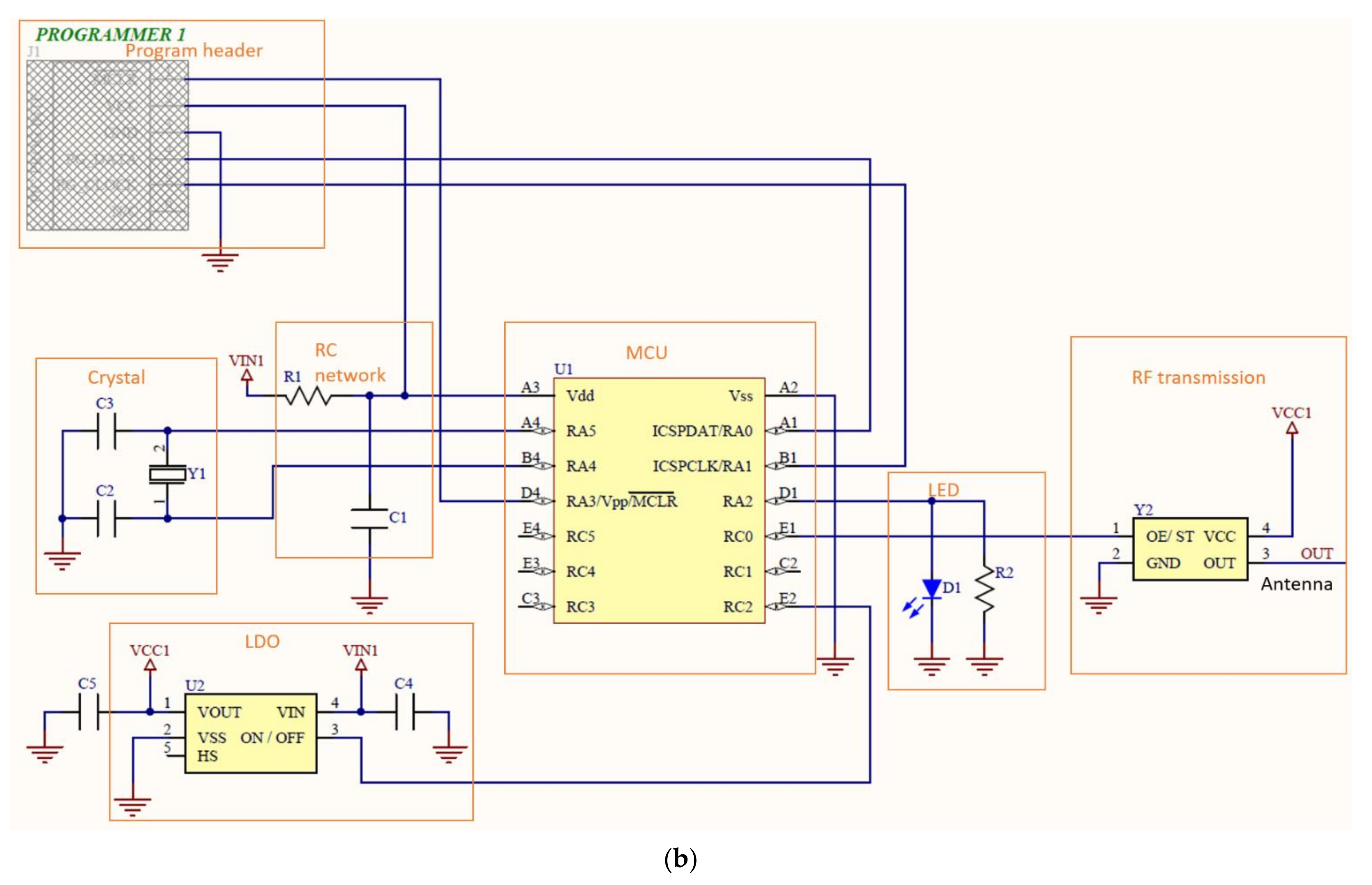
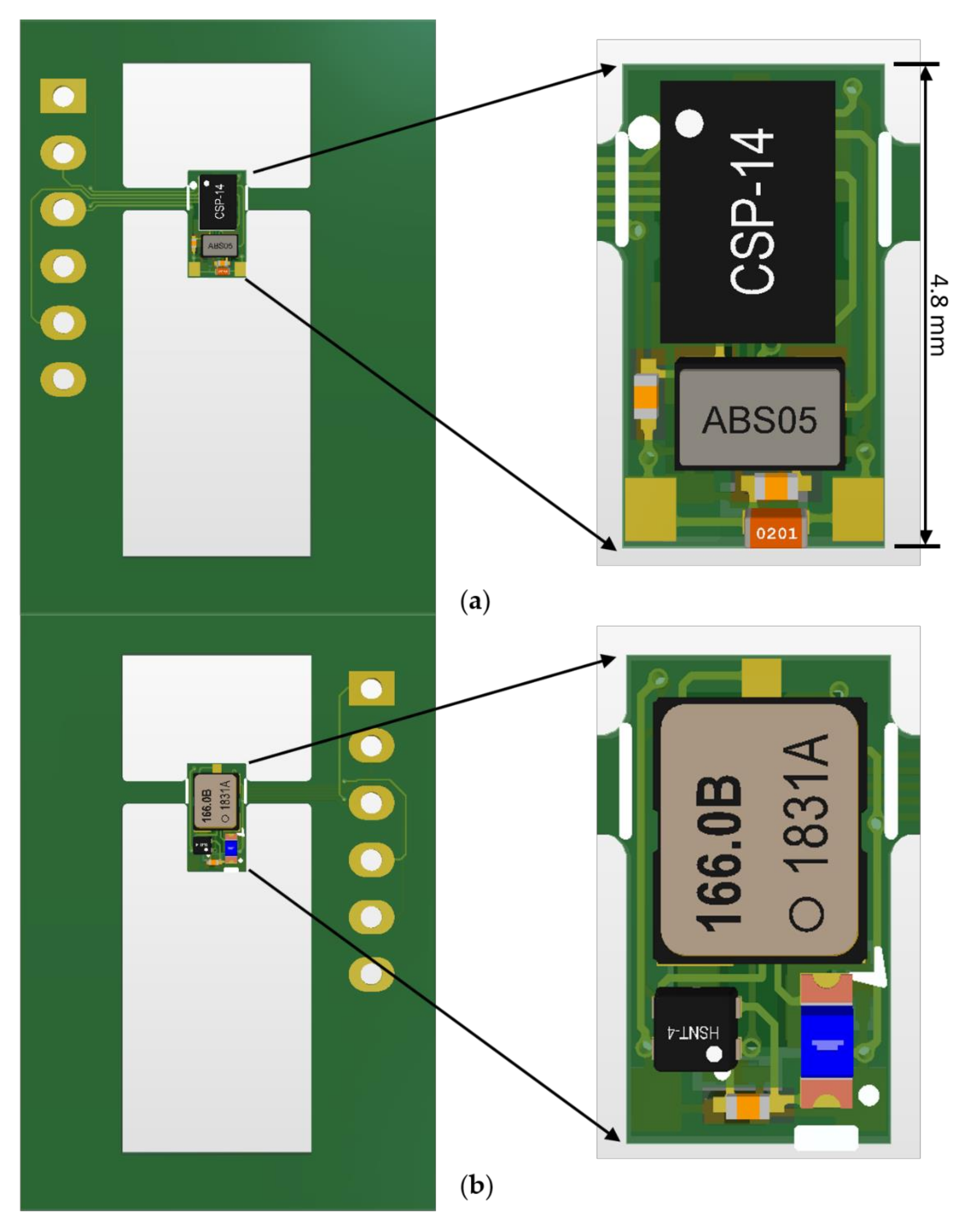
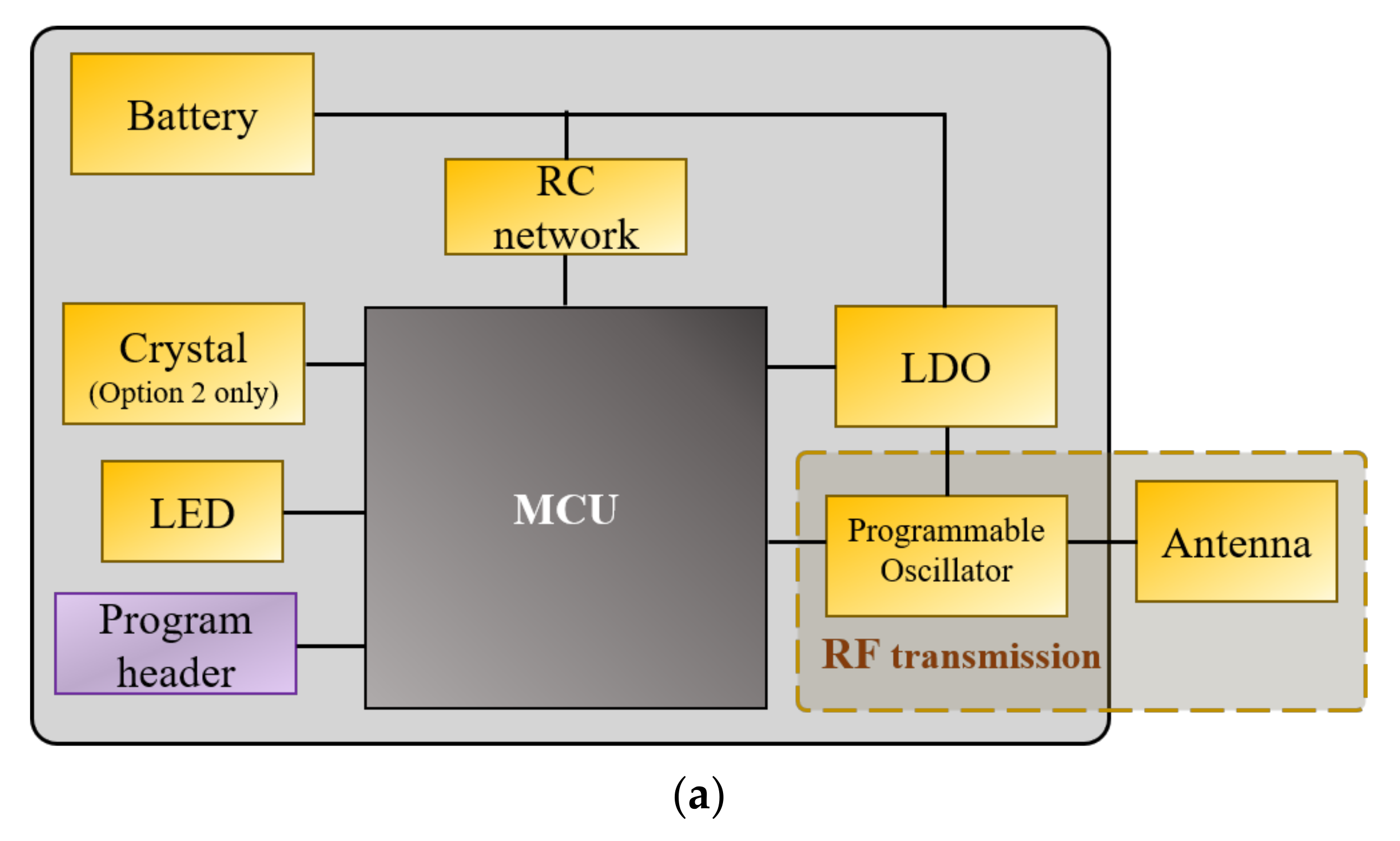
2.1. Circuit Board Design
2.2. Circuit Firmware Design
2.3. Battery
2.4. Antenna
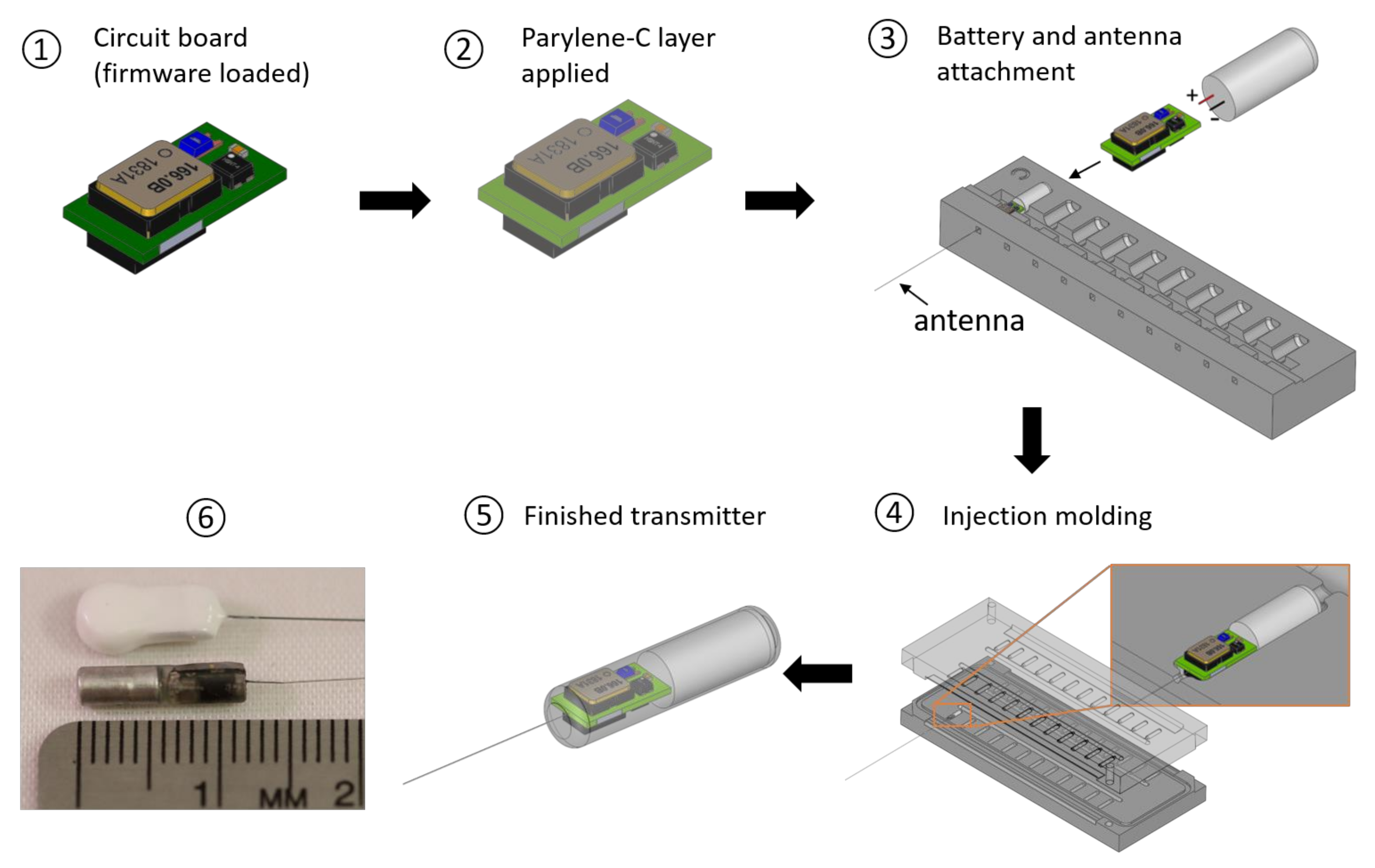
2.5. Packaging and Manufacturing
3. Results
3.1. Transmitter Signal Strength Testing
3.2. Transmitter Life Testing
- —the battery voltage in volts,
- —the battery capacity in mAh,
- —the energy consumed by each transmission,
- —static current,
- —the signal period (ping rate),
- —the service life in days.
4. Conclusions
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dressler, F.; Ripperger, S.; Hierold, M.; Nowak, T.; Eibel, C.; Cassens, B.; Mayer, F.; Meyer-Wegener, K.; Koelpin, A. From radio telemetry to ultra-low-power sensor networks: Tracking bats in the wild. IEEE Commun. Mag. 2016, 54, 129–135. [Google Scholar] [CrossRef]
- Körner, F.; Speck, R.; Göktoğan, A.H.; Sukkarieh, S. Autonomous Airborne Wildlife Tracking Using Radio Signal Strength. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Taipei, China, 18–22 October 2010. [Google Scholar]
- Gingerich, A.J.; Bellgraph, B.J.; Brown, R.S.; Tavan, N.T.; Deng, Z.; Brown, J. Quantifying reception strength and omnidi-rectionality of underwater radio telemetry antennas: Advances and applications for fisheries research. Fish. Res. 2012, 121–122, 1–8. [Google Scholar] [CrossRef]
- Bontadina, F.; Schofield, H.; Naef-Daenzer, B. Radio-tracking reveals that lesser horseshoe bats (Rhinolophus hipposideros) forage in woodland. J. Zool. 2002, 258, 281–290. [Google Scholar] [CrossRef] [Green Version]
- Warwick-Evans, V.; Atkinson, P.; Walkington, I.; Green, J.A. Predicting the impacts of wind farms on seabirds: An individual-based model. J. Appl. Ecol. 2017, 55, 503–515. [Google Scholar] [CrossRef] [Green Version]
- Poessel, S.A.; Brandt, J.; Mendenhall, L.; Braham, M.A.; Lanzone, M.J.; McGann, A.J.; Katzner, T.E. Flight response to spa-tial and temporal correlates informs risk from wind turbines to the California Condor. Condor 2018, 120, 330–342. [Google Scholar] [CrossRef]
- Sikes, R.S.; Gannon, W.L. Guidelines of the American Society of Mammalogists for the use of wild mammals in research. J. Mammal. 2011, 92, 235–253. [Google Scholar] [CrossRef]
- Kunz, T.H.; Arnett, E.B.; Cooper, B.M.; Erickson, W.P.; Larkin, R.P.; Mabee, T.; Morrison, M.L.; Strickland, M.D.; Szewczak, J.M. Assessing Impacts of Wind-Energy Development on Nocturnally Active Birds and Bats: A Guidance Document. J. Wildl. Manag. 2007, 71, 2449–2486. [Google Scholar] [CrossRef]
- Mulcahy, D.M. Surgical Implantation of Transmitters into Fish. ILAR J. 2003, 44, 295–306. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aldridge, H.; Brigham, R.M. Load carrying and maneuverability in an insectivorousbat: A test of the 5% rule. J. Mammal. 1998, 69, 379–382. [Google Scholar] [CrossRef]
- Lotek Wireless Inc. Available online: https://www.lotek.com (accessed on 6 October 2021).
- Chen, H.; Cartmell, S.S.; Wang, Q.; Lozano, T.; Deng, Z.; Li, H.; Chen, X.; Yuan, Y.; Gross, M.E.; Carlson, T.J.; et al. Microbattery development for juvenile salmon acoustic telemetry system applications. Sci. Rep. 2014, 4, 3790. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Deng, Z.; Lu, J.; Li, H.; Tian, C.; Myjak, M.J.; Bellgraph, B.J.; Cartmell, S.S.; Xiao, J. Signal Transmitter and Methods for Transmit-ting Signals from Animals. US Patent Number 10,236,920, 19 March 2019. [Google Scholar]
- Microchip Technology, Chandler, AZ. Available online: http://www.microchip.com/wwwproducts/Devices.aspx?product=PIC16F1823 (accessed on 6 October 2021).
- Dietz, P.; Yerazunis, W.; Leigh, D. Very Low-Cost Sensing and Communication Using Bidirectional LEDs. In Ubiquitous Computing; Springer: Berlin/Heidelberg, Germany, 2003; pp. 175–191. [Google Scholar]
- Ripoll-Vercellone, E.; Reverter, F.; Gasulla, M. LED-Based Wake-Up Circuit for Microcontrollers. IEEE Trans. Instrum. Meas. 2020, 69, 5966–5968. [Google Scholar] [CrossRef]
- Liu, C.-C.; O’Connor, E.; Strohl, K.P. A multichannel, wireless telemetric microsystem for small animal studies. IEEE Sens. J. 2006, 6, 187–202. [Google Scholar]
- Deng, Z.; Carlson, T.J.; Li, H.; Xiao, J.; Myjak, M.; Lu, J.; Martinez, J.J.; Woodley, C.M.; Weiland, M.A.; Eppard, M.B. An injectable acoustic transmitter for juvenile salmon. Sci. Rep. 2015, 5, srep08111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kuechle, V.B.; Kuechle, P.J. Radio Telemetry in Fresh Water: The Basics Telemetry Techniques. A User Guide for Fisheries Research; American Fisheries Society: Bethesda, MD, USA, 2012. [Google Scholar]
- Advanced Telemetry Systems, Inc. 1505 Transmitter. Available online: https://atstrack.com/tracking-products/transmitters/product-transmitters.aspx?serie=F1505 (accessed on 6 October 2021).
- Parvereshi, J.; Tabatabaei, S. Enhancing FPGA-based Systems with Programmable Oscillators. Available online: https://www.sitime.com/api/gated/Enhancing-FPGA-based-Systems.pdf (accessed on 6 October 2021).
- Seiko Epson Corp. Available online: https://www5.epsondevice.com/en/products/crystal_oscillator/sg8003cg.html (accessed on 6 October 2021).
- Advanced Telemetry Systems, Inc. Available online: https://atstrack.com/ (accessed on 6 October 2021).
- Allen, J. Use of Coded Transmitter Schemes to Overcome Radio Frequency Spectrum Constraints in Terrestrial Wildlife Tracking. Available online: https://atstrack.com/assets/documents/Use-of-Coded-Transmitters-in-Wildlife-Telemetry-Systems.pdf (accessed on 6 October 2021).
- Beeman, J.W.; Bower, N.; Juhnke, S.; Dingmon, L.; Tillaart, M.V.D.; Thomas, T. Effects of antenna length and material on output power and detection of miniature radio transmitters. Hydrobiologia 2007, 582, 221–229. [Google Scholar] [CrossRef]
- Sigma Eight Inc. Available online: https://sigmaeight.ca/ (accessed on 6 October 2021).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PNNL Option 1 (3 s Ping Rate) Transmitter | Calculated Life (Days) | Measured Life (Days) |
|---|---|---|
| Low-signal-strength Transmitter (test sample 1) | 23 | 30 |
| Low-signal-strength Transmitter (test sample 2) | 23 | 24 |
| Transmitter | Size (mm) (w*h*l) | Weight (Air, mg) | Calculated Life (PRI, Days) | |||
|---|---|---|---|---|---|---|
| 2 s | 5 s | 10 s | 60 s | |||
| Lotek NTQ-1 | 5*3*10 | 260 | 10 | 21 | 33 | 59 |
| Lotek NTQ-2 | 5*3*10 | 310 | 16 | 33 | 52 | 94 |
| PNNL Option 1 Low signal strength | Ø 2.95*11.22 | 152 | 15 | 37 | 60 | 245 |
| PNNL Option 1 High signal strength | Ø 2.95*11.22 | 152 | 12 | 24 | 56 | 217 |
| PNNL Option 2 Low signal strength | Ø 2.95*11.85 | 160 | 11 | 22 | 52 | 205 |
| PNNL Option 2 High signal strength | Ø 2.95*11.85 | 160 | 8 | 21 | 41 | 176 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Li, H.; Tian, C.; Myjak, M.J.; Xiao, J.; Bellgraph, B.J.; Cartmell, S.S.; Deng, Z.D. A Frequency-Programmable Miniaturized Radio Frequency Transmitter for Animal Tracking. Sensors 2021, 21, 6683. https://doi.org/10.3390/s21196683
Lu J, Li H, Tian C, Myjak MJ, Xiao J, Bellgraph BJ, Cartmell SS, Deng ZD. A Frequency-Programmable Miniaturized Radio Frequency Transmitter for Animal Tracking. Sensors. 2021; 21(19):6683. https://doi.org/10.3390/s21196683
Chicago/Turabian StyleLu, Jun, Huidong Li, Chuan Tian, Mitchell J. Myjak, Jie Xiao, Brian J. Bellgraph, Samuel S. Cartmell, and Zhiqun Daniel Deng. 2021. "A Frequency-Programmable Miniaturized Radio Frequency Transmitter for Animal Tracking" Sensors 21, no. 19: 6683. https://doi.org/10.3390/s21196683
APA StyleLu, J., Li, H., Tian, C., Myjak, M. J., Xiao, J., Bellgraph, B. J., Cartmell, S. S., & Deng, Z. D. (2021). A Frequency-Programmable Miniaturized Radio Frequency Transmitter for Animal Tracking. Sensors, 21(19), 6683. https://doi.org/10.3390/s21196683