
Relay Selection for Capacity Increase in Underwater Acoustic Sensor Network


Abstract
:1. Introduction
1.1. Related Work
1.2. Motivation and Objectives
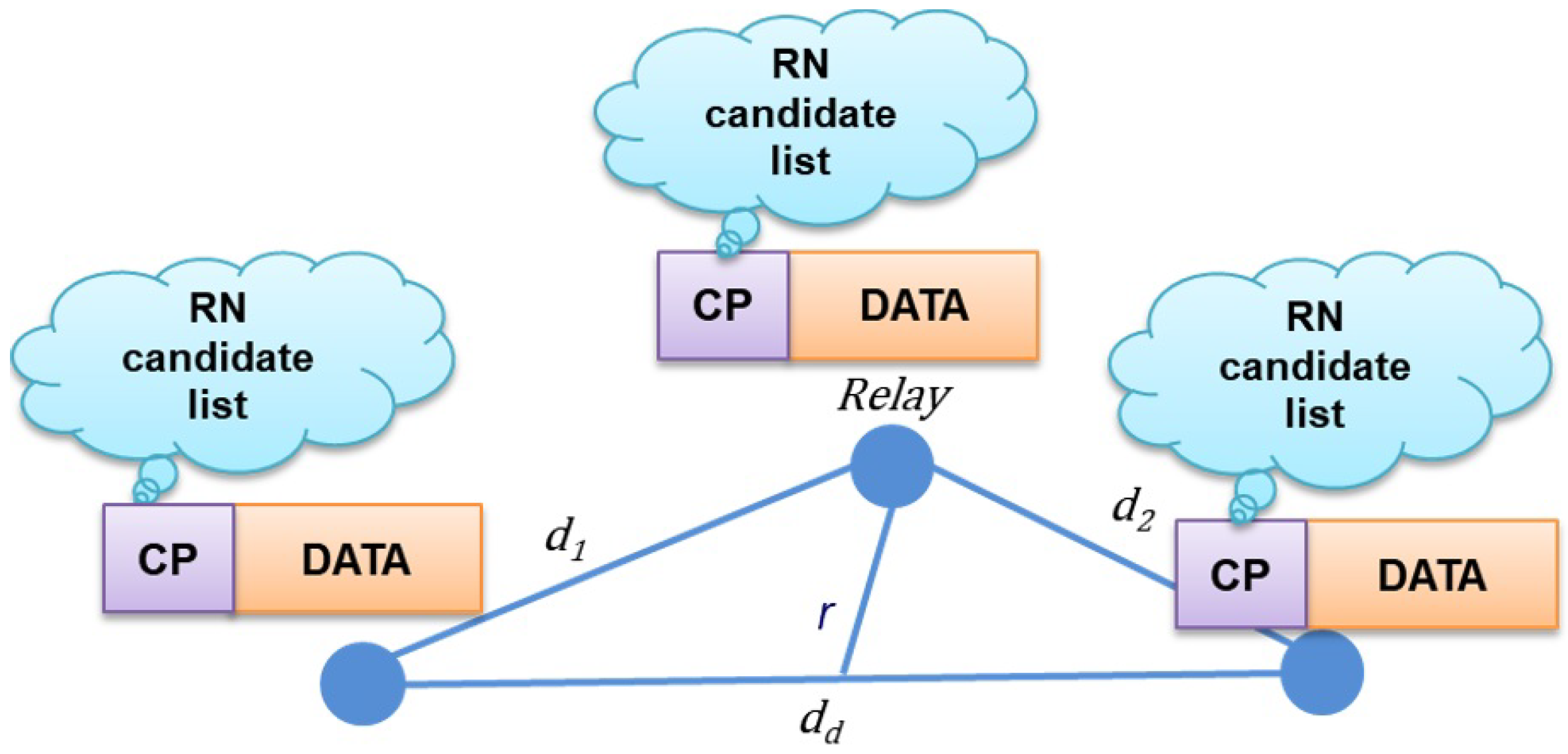
- The list of selected RNs is created by summing the two link propagation delays (S-RN and RN-D). RNs are arranged in an order that the top most RN has the minimum distance to the midpoint of direct link (S-D). The arranged list of selected RNs is attached along with data packet.
- Each RN, whose name is available in the list of best RNs, buffer the data packet while remaining RNs discards the received data packet.
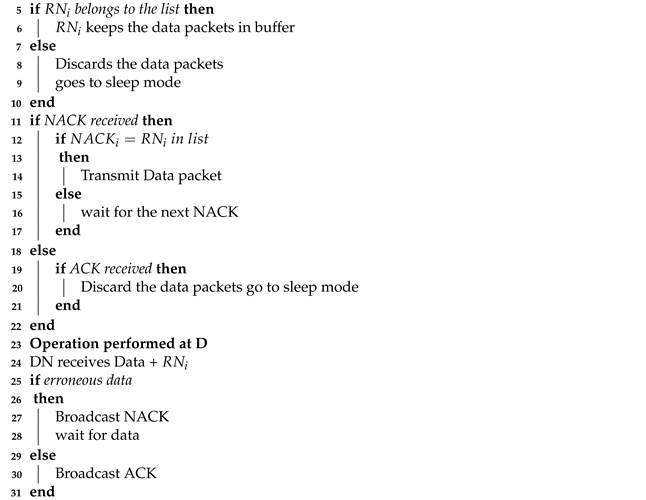
- When D receives erroneous data packet, it asks for retransmission by broadcasting NACK until the data packet is received successfully.
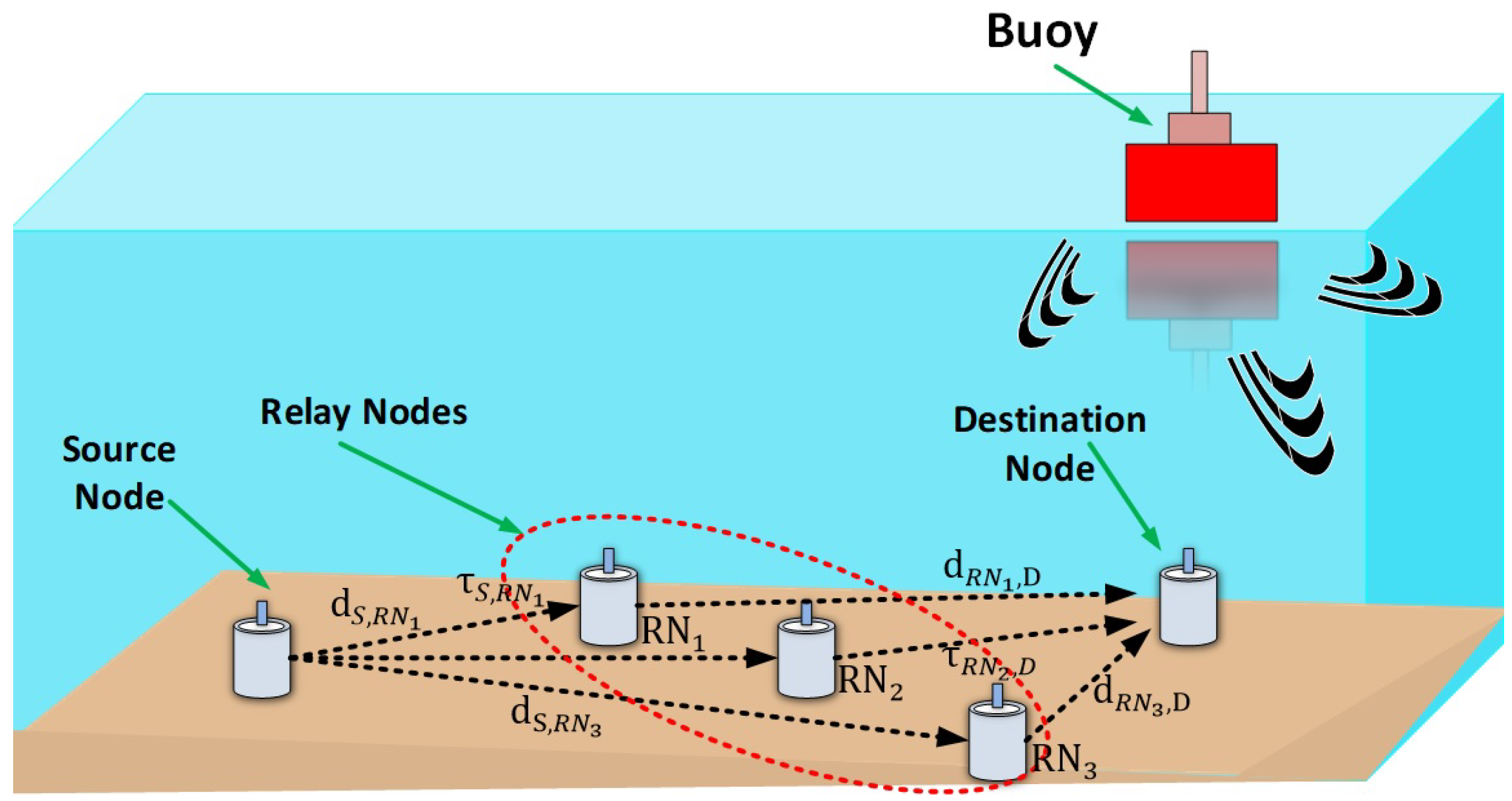
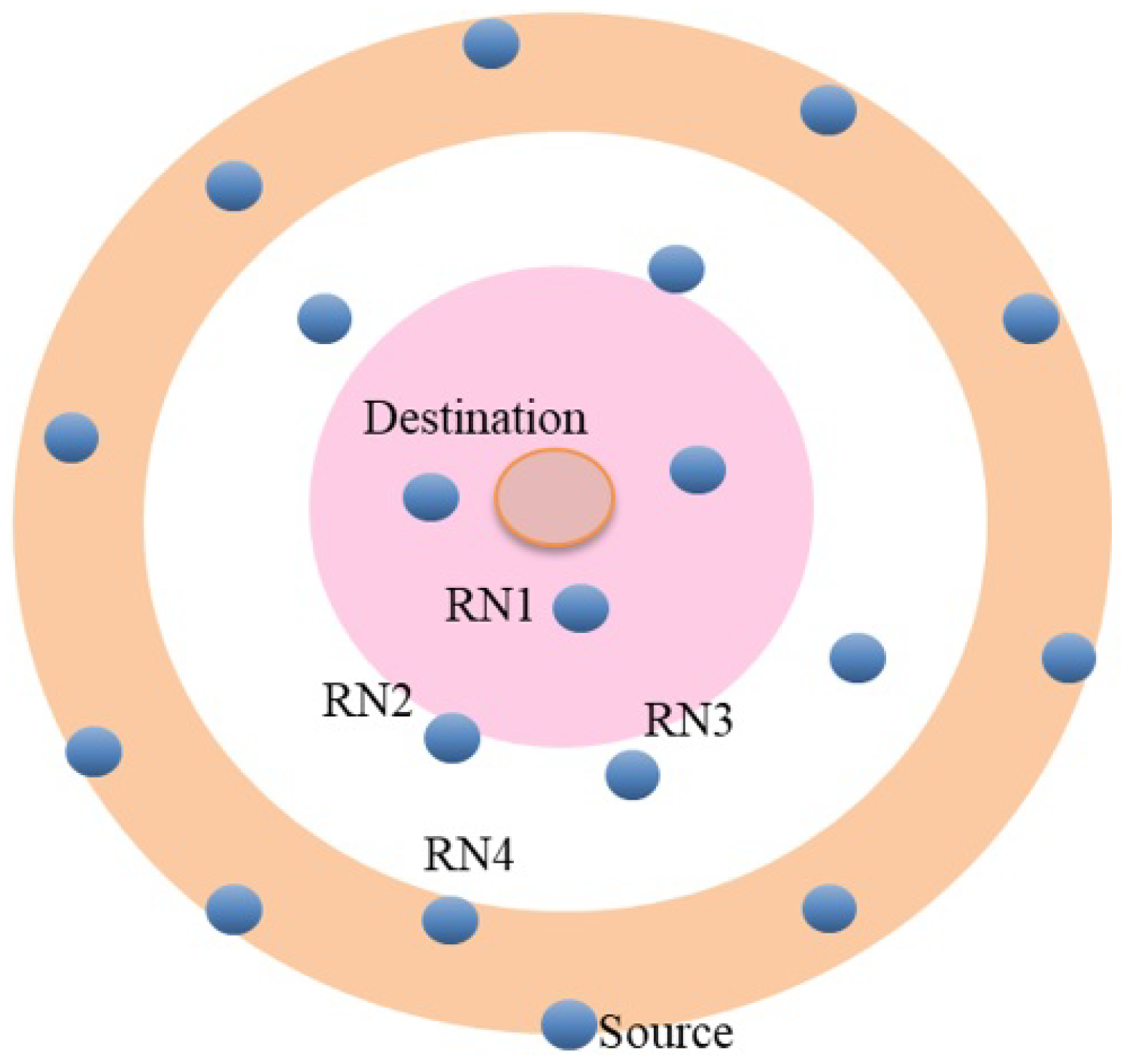
2. UWA System Model
3. Proposed Examining and Selecting the Best Relay Node (EBRN) Scheme
- All nodes have the same transmission power and receiver capability.
- Every node is fixed on a seabed and is unable to acquire a timing synchronization due to the UWA channel characteristics.
- All nodes know the distance and the propagation delay time from/to one-hop neighboring nodes through the network initialization.
- The reactive type of the decode-forward (DF) signaling strategy is utilized on each RN.
- The errors occur only in data packets, not in the control packets.
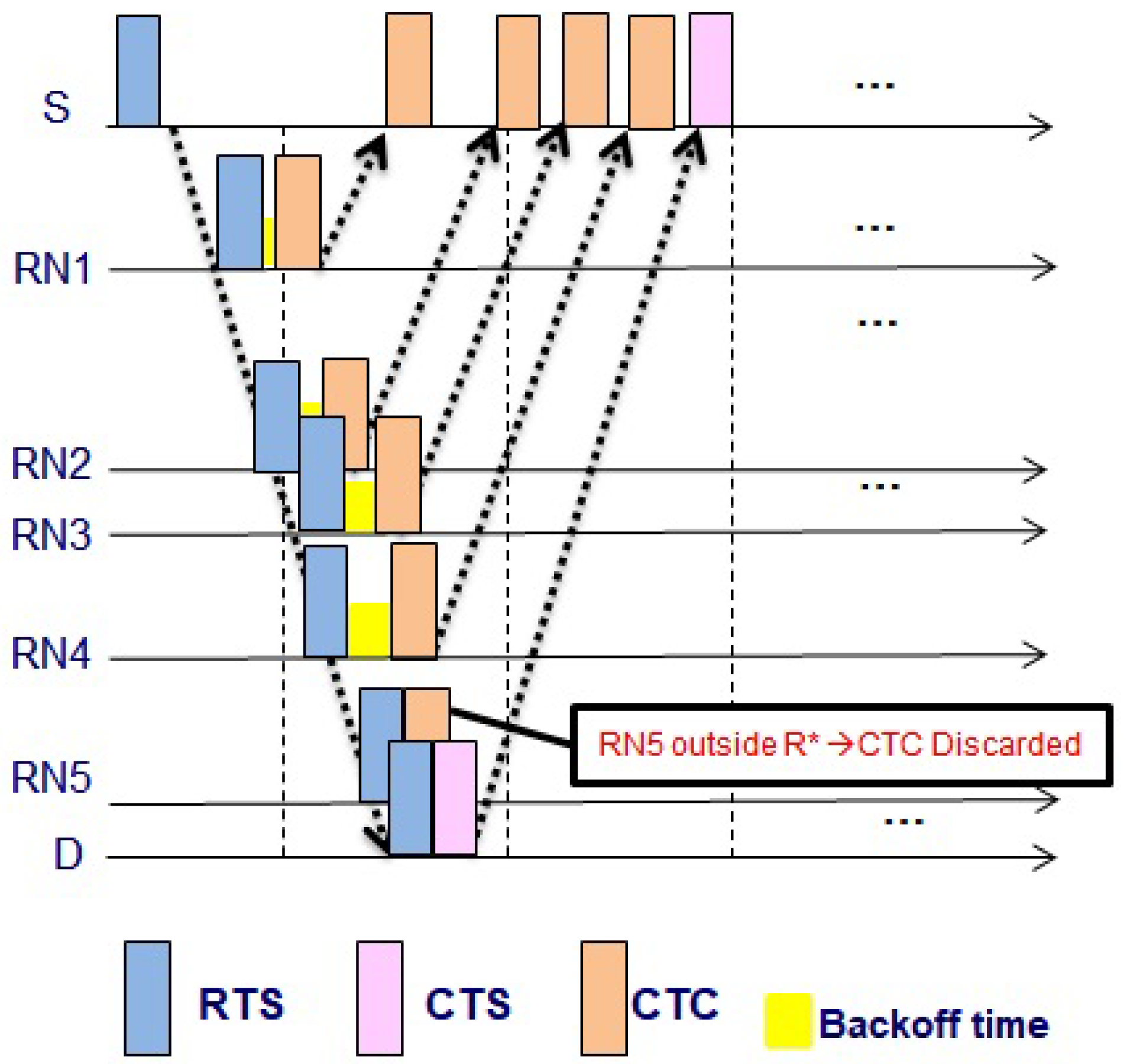
3.1. Initial Channel Reservation Phase
3.1.1. Estimate RN Eligibility and Compatibility
3.1.2. Reduce Control Packet Collision
3.1.3. Best Relay Node Selection
3.2. Data Transmission Phase
3.2.1. Broadcast Information of Selected Relay Node
| Algorithm 1 Initial Channel Reservation Phase |
| 1 Operation performed at S |
| 2 S transmit RTS |
| 3 CTCs received |
| 4 Sort RN –> mini. distance to midpoint |
| 5 Create list of RNs |
| 6Operation performed at RNs |
 |
| 20Operation performed at D |
| 21 Transmit CTS |
3.2.2. Data Retransmission
| Algorithm 2 Data Transmission Phase |
| 1 Operation performed at S |
| 2 S transmit Data packet + list of RNs (RN) |
| 3 Operation performed at RNs |
| 4 RN decode Data packet + list of RNs |
 |
4. System Level Simulation Results
4.1. UWA Network Model
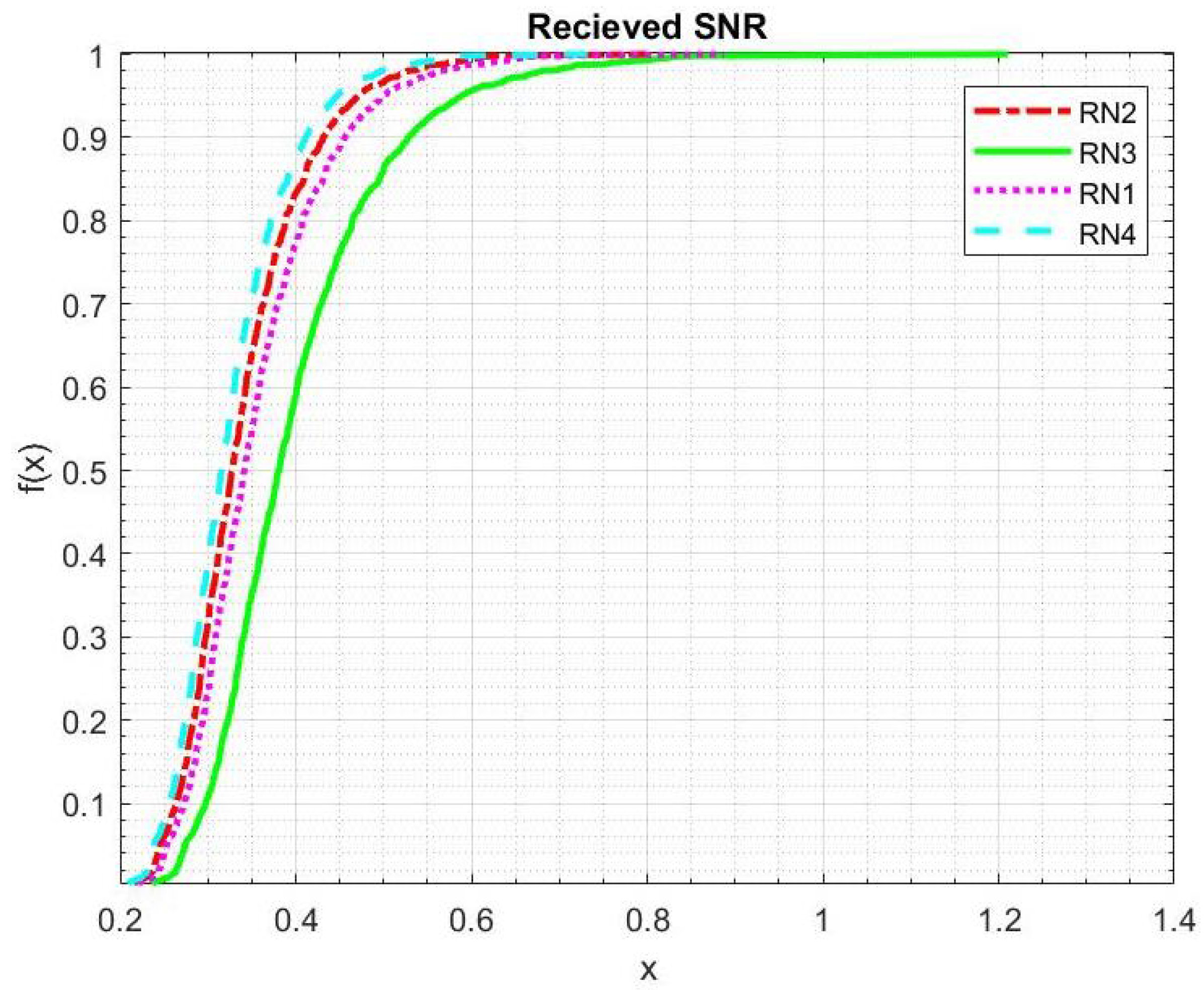
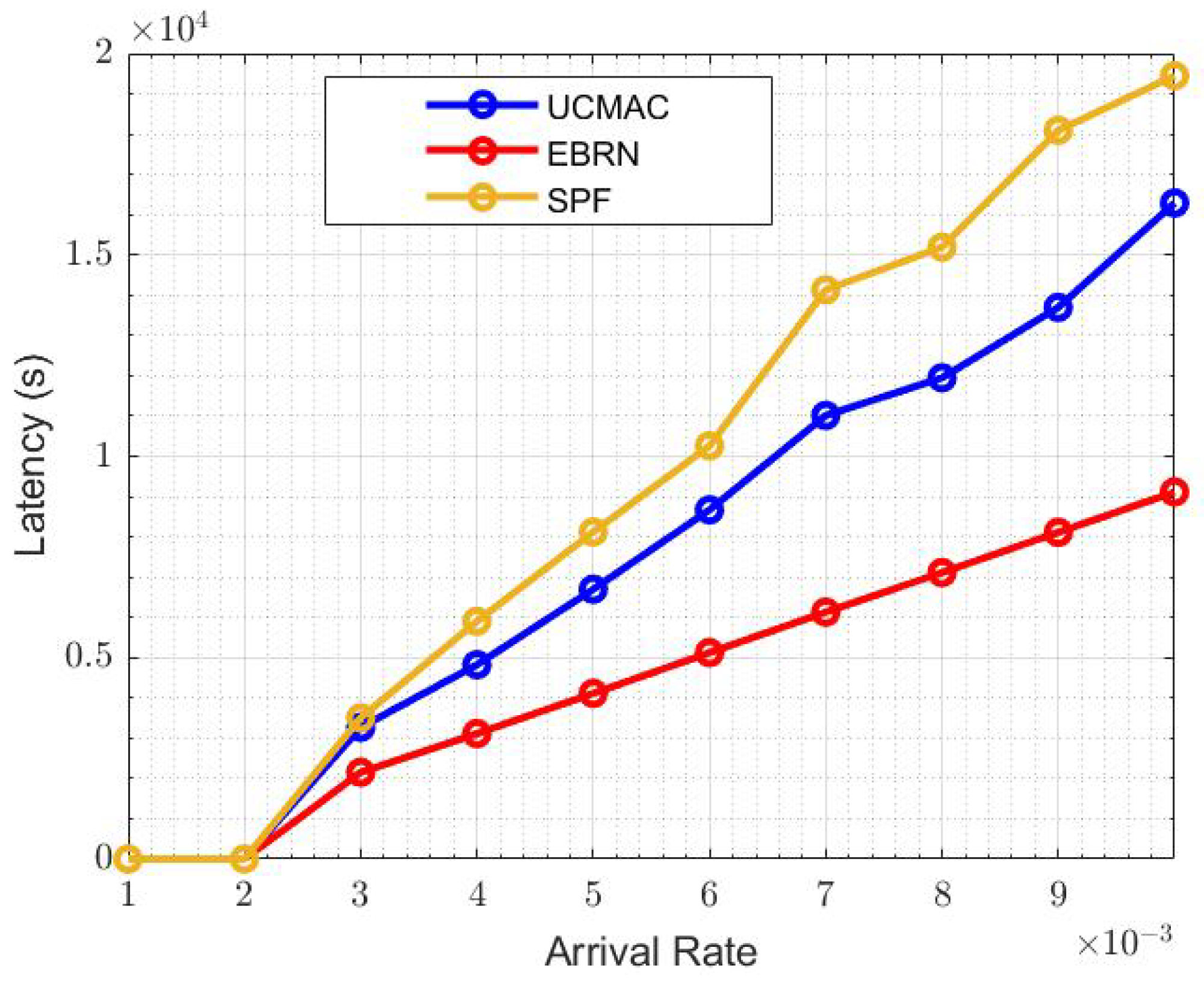
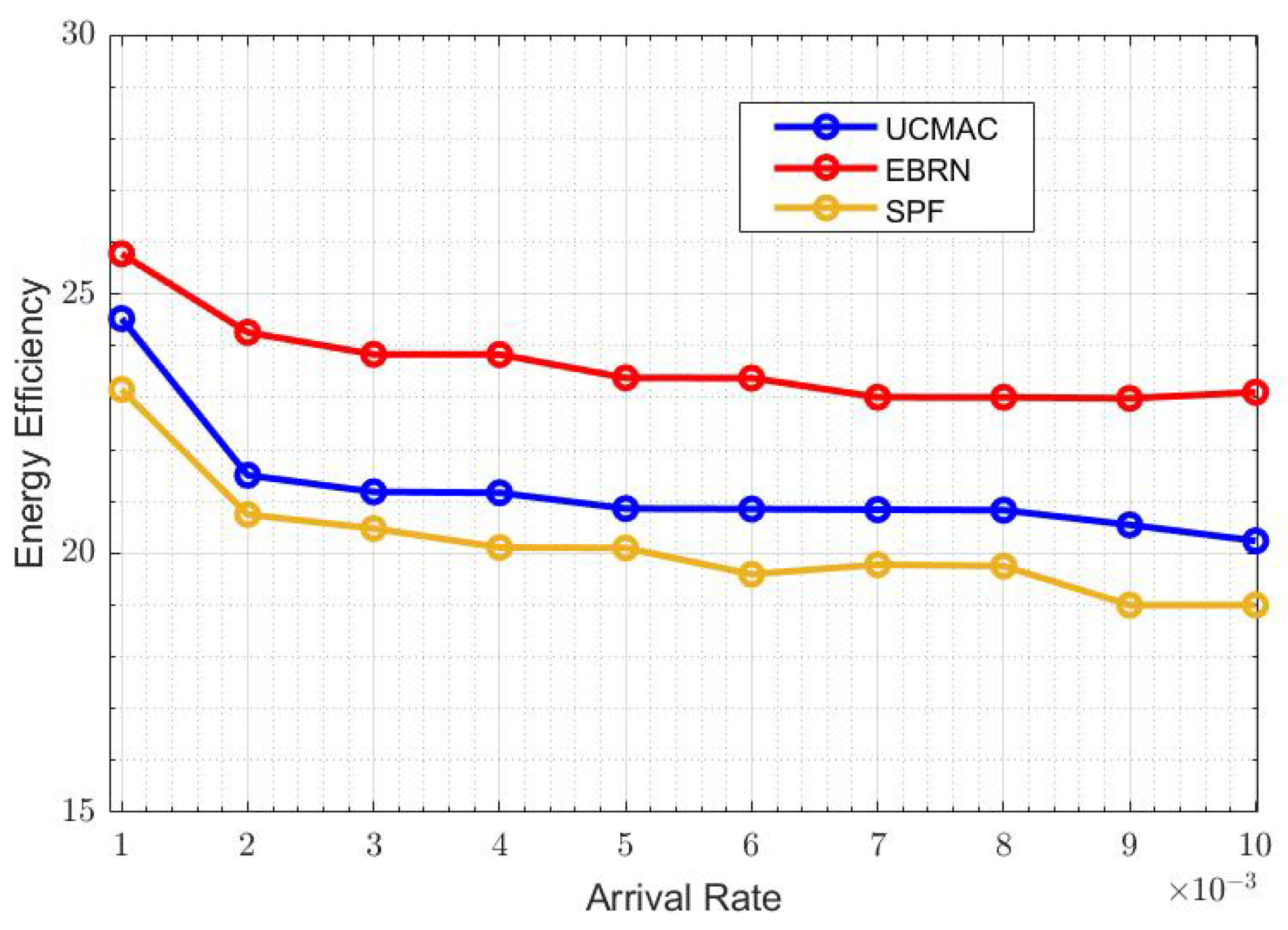
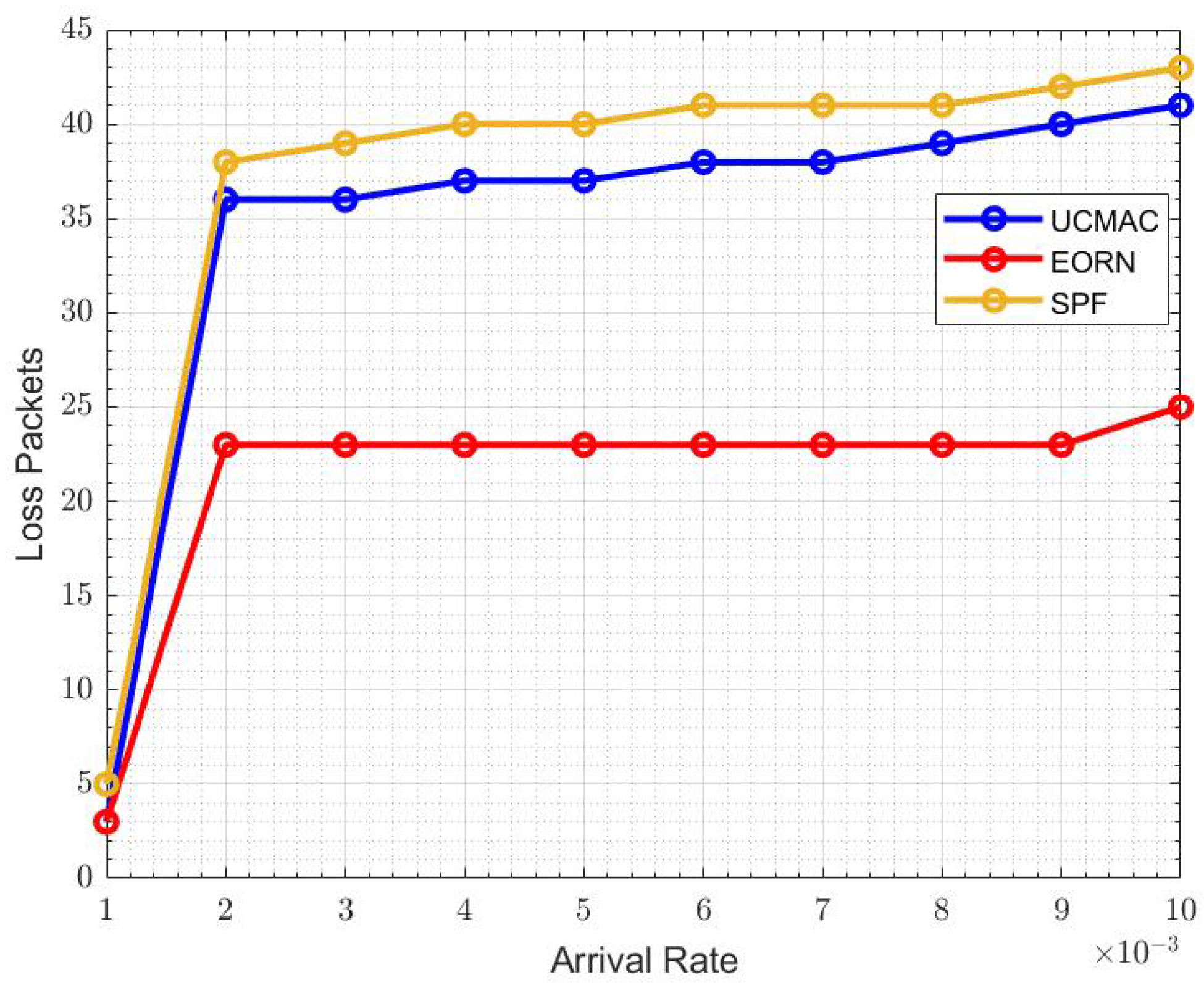
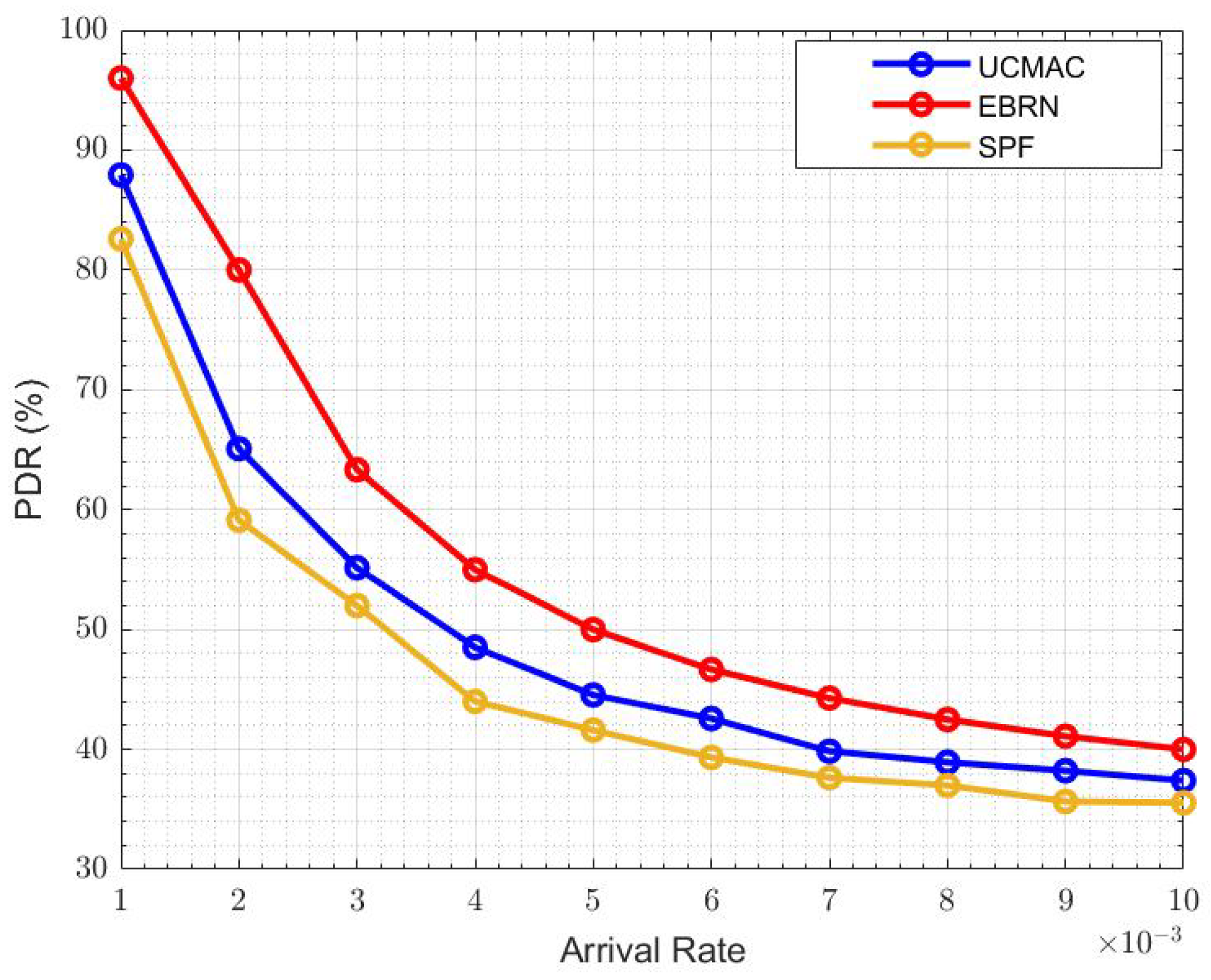
4.2. Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Han, S.; Li, X.; Yan, L.; Xu, J.; Liu, Z.; Guan, X. Joint resource allocation in underwater acoustic communication networks: A game-based hierarchical adversarial multiplayer multiarmed bandit algorithm. Inf. Sci. 2018, 454–455, 382–400. [Google Scholar] [CrossRef]
- He, Y.; Han, G.; Jiang, J.; Wang, H.; Martinez-Garcia, M. A Trust Update Mechanism Based on Reinforcement Learning in Underwater Acoustic Sensor Networks. IEEE Trans. Mob. Comput. 2020. [Google Scholar] [CrossRef]
- Latif, K.; Javaid, N.; Ullah, I.; Kaleem, Z.; Malik, Z.A.; Nguyen, L.D. DIEER Delay-intolerant energy-efficient routing with sink mobility in underwater wireless sensor networks. Sensors 2020, 20, 3467. [Google Scholar] [CrossRef]
- Blanc, S. Event-driven data gathering in pure asynchronous multi-hop underwater acoustic sensor networks. Sensors 2020, 20, 1407. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Su, Y.; Fan, R.; Jin, Z. ORIT: A transport layer protocol design for underwater DTN sensor networks. IEEE Access 2019, 7, 69592–69603. [Google Scholar] [CrossRef]
- Ahmad, I.; Chang, K.H. Downlink power allocation strategy for nextgeneration underwater acoustic communications networks. Electronics 2019, 8, 1297. [Google Scholar] [CrossRef] [Green Version]
- Song, Y. Underwater acoustic sensor networks with cost efficiency for Internet of underwater things. IEEE Trans. Ind. Electron. 2021, 68, 1707–1716. [Google Scholar] [CrossRef]
- Ahmad, I.; Chang, K. Effective SNR mapping and link adaptation strategy for next-generation underwater acoustic communications networks: A cross-layer approach. IEEE Access 2019, 7, 44150–44164. [Google Scholar] [CrossRef]
- Tran-Dang, H.; Kim, D.-S. Channel-aware cooperative routing in underwater acoustic sensor networks. J. Commun. Netw. 2019, 21, 33–44. [Google Scholar] [CrossRef]
- Stojanovic, M.; Beaujean, P. Acoustic Communication. In Springer Handbook of Acoustic; Dhanak, M.R., Xiros, N.I., Eds.; Springer: New York, NY, USA, 2016; pp. 359–383. [Google Scholar]
- Melodia, T.; Kulhandjian, H.; Demirors, E. Advances in underwater acoustic networking. In Mobile Ad-Hoc Networking: Cutting Edge Directions, 2nd ed.; Basagni, S., Conti, M., Giordano, S., Stojmenovic, I., Eds.; John Wiley and Sons: Hoboken, NJ, USA, 2013; pp. 504–854. [Google Scholar]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Berger, C.R.; Zhou, S.; Willett, P. Sparse channel estimation for multicarrier underwater acoustic communication: From subspace methods to compressed sensing. IEEE Trans. Signal Process. 2010, 58, 1708–1721. [Google Scholar] [CrossRef] [Green Version]
- Qu, F.; Wang, Z.; Yang, L. A journey toward modeling and resolving doppler in underwater acoustic communications. IEEE Commun. Mag. 2016, 54, 49–55. [Google Scholar] [CrossRef]
- Chen, Y.-S.; Juang, T.-Y.; Lin, Y.-W.; Tsai, I.-C. A Low Propagation Delay Multi-Path Routing Protocol for Underwater Sensor Networks. J. Internet Technol. 2009, 11, 153–165. [Google Scholar]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spadaccini, D. CARP: A Channel-aware routing protocol for underwater acoustic wireless networks. Ad Hoc Netw. 2015, 34, 92–104. [Google Scholar] [CrossRef]
- Llor, J.; Malumbres, M.P. Underwater Wireless Sensor Networks: How Do Acoustic Propagation Models Impact the Performance of Higher-Level Protocols? Sensors 2012, 12, 1312–1335. [Google Scholar] [CrossRef] [Green Version]
- Kularia, Y.; Kohli, S. Analyzing propagation delay, transmission loss and signal to noise ratio in acoustic channel for Underwater Wireless Sensor Networks. In Proceedings of the IEEE 1st international Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016. [Google Scholar]
- Dianati, M.; Ling, X.; Naik, K.; Shen, X. A Node-Cooperative ARQ Scheme for Wireless Ad Hoc Networks. IEEE. Trans. Veh. Technol. 2006, 55, 1032–1044. [Google Scholar] [CrossRef]
- Wang, C.-L.; Syue, S.-J. An Efficient Relay Selection Protocol for Cooperative Wireless Sensor Networks. In Proceedings of the 2009 IEEE Wireless Communications and Networking Conference, Budapest, Hungary, 5–8 April 2009. [Google Scholar]
- Lin, Z.; Li, Y.; Wen, S.; Gao, Y. Stochastic geometry analysis of achievable transmission capacity for relay-assisted Device-to-Device networks. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, Australia, 10–14 June 2014. [Google Scholar]
- Li, Q.; Hu, R.Q.; Qian, Y. Cooperative communications for wireless networks: Techniques and applications in LTE-advanced systems. IEEE Wirel. Commun. 2012, 19, 22–29. [Google Scholar]
- Abuarqoub, A.; Hammoudeh, M.; Adebisi, B.; Jabbar, S.; Bounceur, A.; Al-Bashar, H. Dynamic clustering and management of mobile wireless sensor networks. Comput. Netw. 2017, 117, 62–75. [Google Scholar] [CrossRef] [Green Version]
- IEEE Computer Society LAN MAN Standards Committee. Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Wang, X.; Yang, C. A MAC Protocol Supporting Cooperative Diversity for Distributed Wireless Ad Hoc Networks. In Proceedings of the IEEE 16th International Symposium on Personal, Indoor and Mobile Radio Communications, Berlin, Germany, 11–14 September 2005; pp. 1396–1400. [Google Scholar]
- Blestsas, A.; Khisti, A.; Reed, D.; Lippman, A. A simple cooperative diversity method based on network path selection. IEEE J. Sel. Areas Commun. 2006, 24, 659–672. [Google Scholar] [CrossRef] [Green Version]
- El-Banna, A.A.A.; Wu, K.; ElHalawany, B.M. Opportunistic cooperative transmission for underwater communication based on the Water’s key physical variables. IEEE Sens. J. 2020, 20, 2792–2802. [Google Scholar] [CrossRef]
- Kim, H.W.; Im, T.H.; Cho, H.S. UCMAC: A Cooperative MAC Protocol for Underwater Wireless Sensor Networks. Sensors 2018, 18, 1969. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wei, Y.; Kim, D.-S. Exploiting Cooperative Relay for Reliable Communications in Underwater Acoustic Sensor Networks. In Proceedings of the IEEE Military Communications Conference, Baltimore, MD, USA, 6–8 October 2014. [Google Scholar]
- Zou, Y.; Zheng, B.; Zhu, W.-P.; Cui, J. An optimal relay selection scheme for cooperative diversity. In Proceedings of the 9th International Conference on Signal Processing, Beijing, China, 16–18 December 2008. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Grid size | 1 km × 1 km |
| Data packet size | 1 kbits |
| Control packet size | 120 bits |
| Data packet duration | 0.2 s |
| Control packet duration | 0.024 s |
| Number of allowed RNs | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Narmeen, R.; Chung, J. Relay Selection for Capacity Increase in Underwater Acoustic Sensor Network. Sensors 2021, 21, 6605. https://doi.org/10.3390/s21196605
Narmeen R, Chung J. Relay Selection for Capacity Increase in Underwater Acoustic Sensor Network. Sensors. 2021; 21(19):6605. https://doi.org/10.3390/s21196605
Chicago/Turabian StyleNarmeen, Ramsha, and Jaehak Chung. 2021. "Relay Selection for Capacity Increase in Underwater Acoustic Sensor Network" Sensors 21, no. 19: 6605. https://doi.org/10.3390/s21196605
APA StyleNarmeen, R., & Chung, J. (2021). Relay Selection for Capacity Increase in Underwater Acoustic Sensor Network. Sensors, 21(19), 6605. https://doi.org/10.3390/s21196605