
Development of a New Negative Obstacle Sensor for Augmented Electric Wheelchair

Abstract
:1. Introduction
- With regard to motor impairments, these mostly comprise spasticity, dystonia, ataxia, tremors, hemiplegia or hemiparesis.
- Visual impairments are generally a limitation of the field of vision coupled with poor acuity, which in the worst cases results in near blindness.
- Cognitive impairments mainly concern the capacity for learning, planning, spatial and temporal representation, management of emotions, etc.
2. Materials and Methods
2.1. Generalized Wheel Protection
2.2. Technology
- The concealment of the scanning of the beam by the wheelchair or the user prevents monitoring of close frontal and lateral areas, mechanically creating large blind spot areas that will therefore not be protected,
- The permanent rotation of the LiDAR induces a reduced measurement rate at one point on the ground, which for a moving chair can result in accidents due to undetected dangers on the ground,
- Rotating LiDARs immune to direct sunlight are expensive, cumbersome and require a large amount of energy.
2.3. Technical Characteristics
2.3.1. Basic Scheme of the Sensor
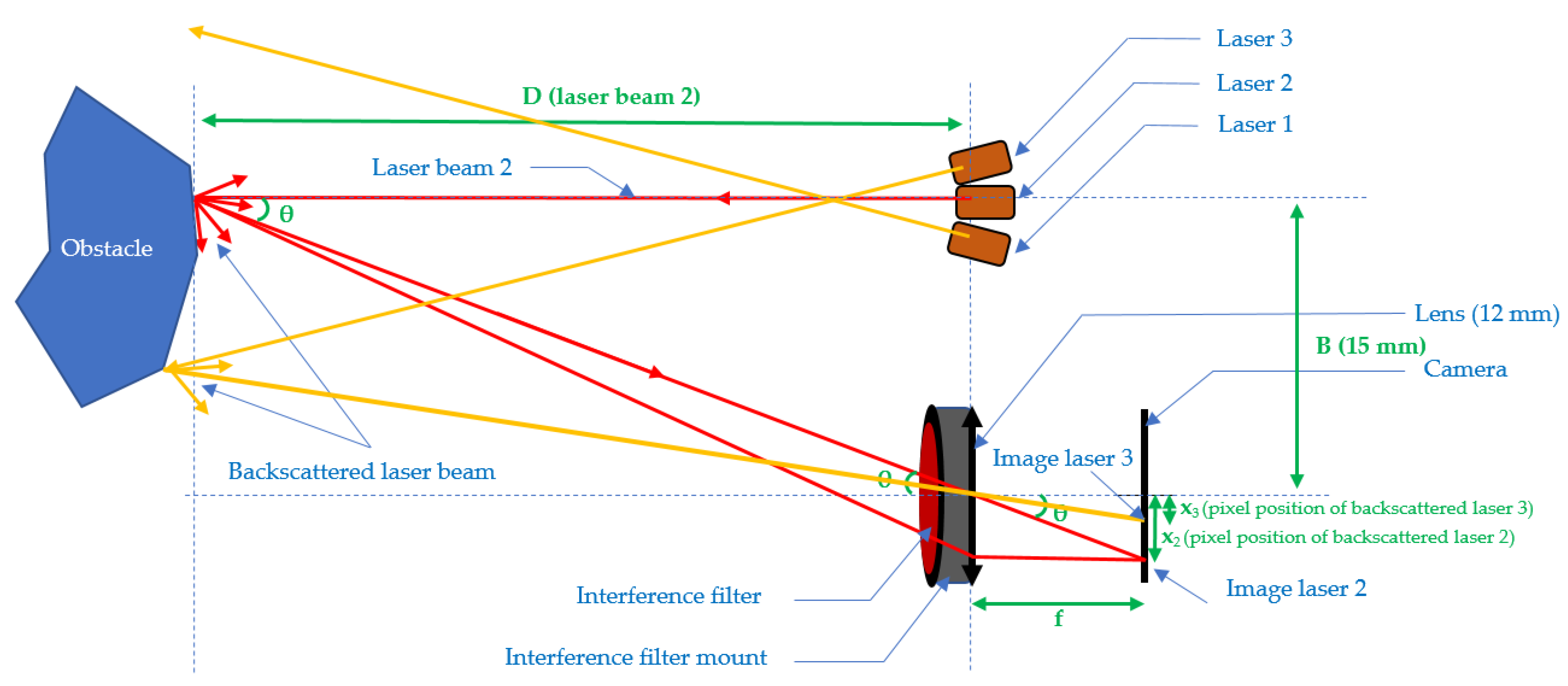
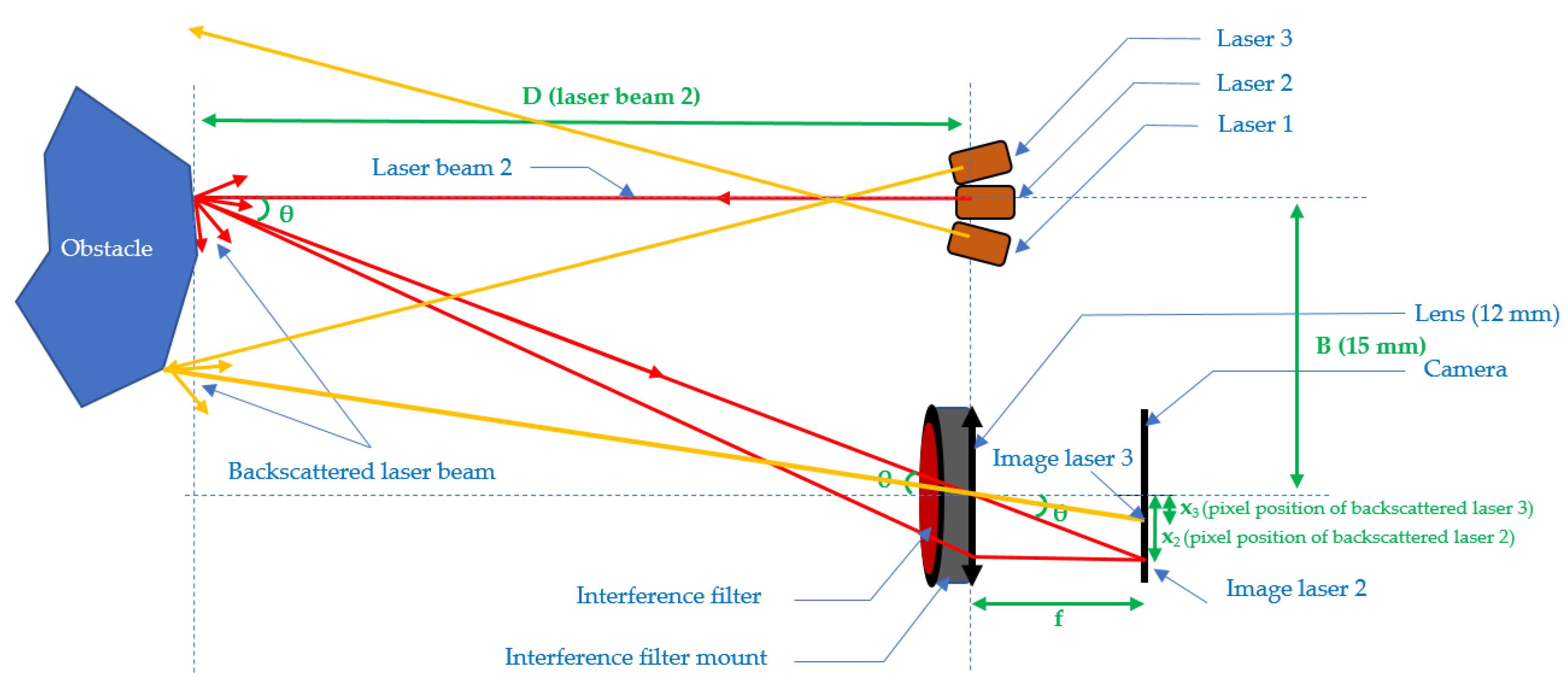
2.3.2. Three-Beam Scheme of the Sensor
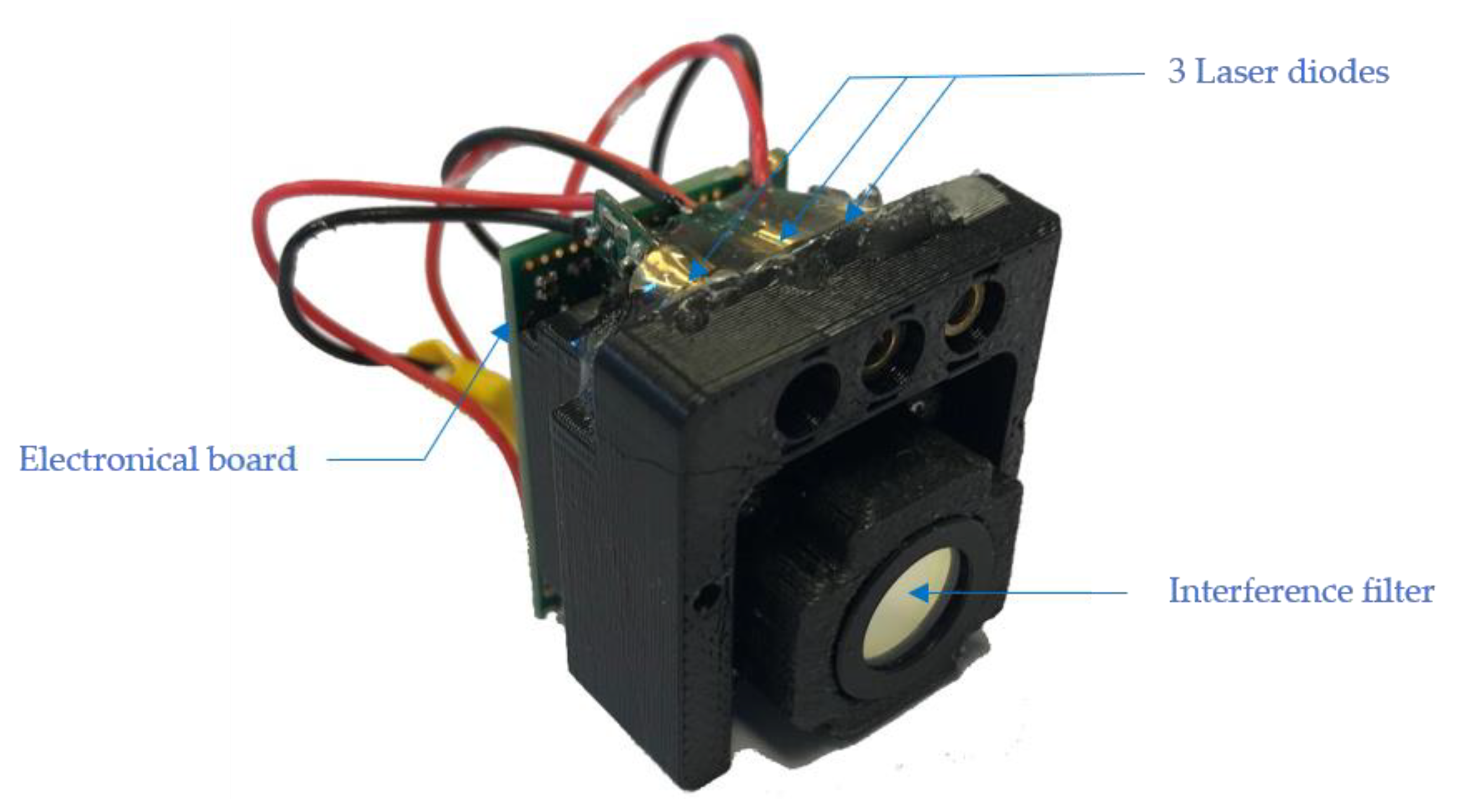
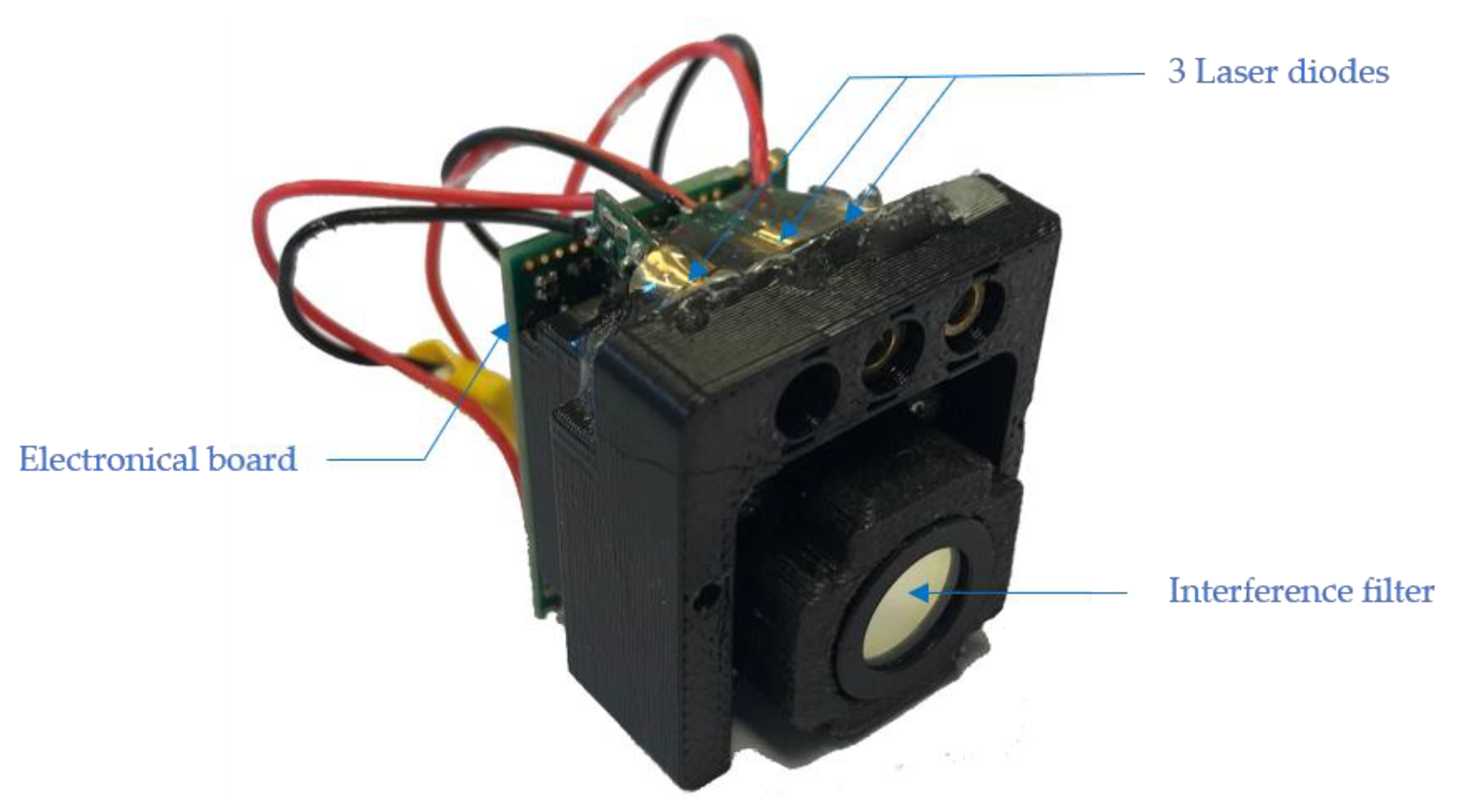
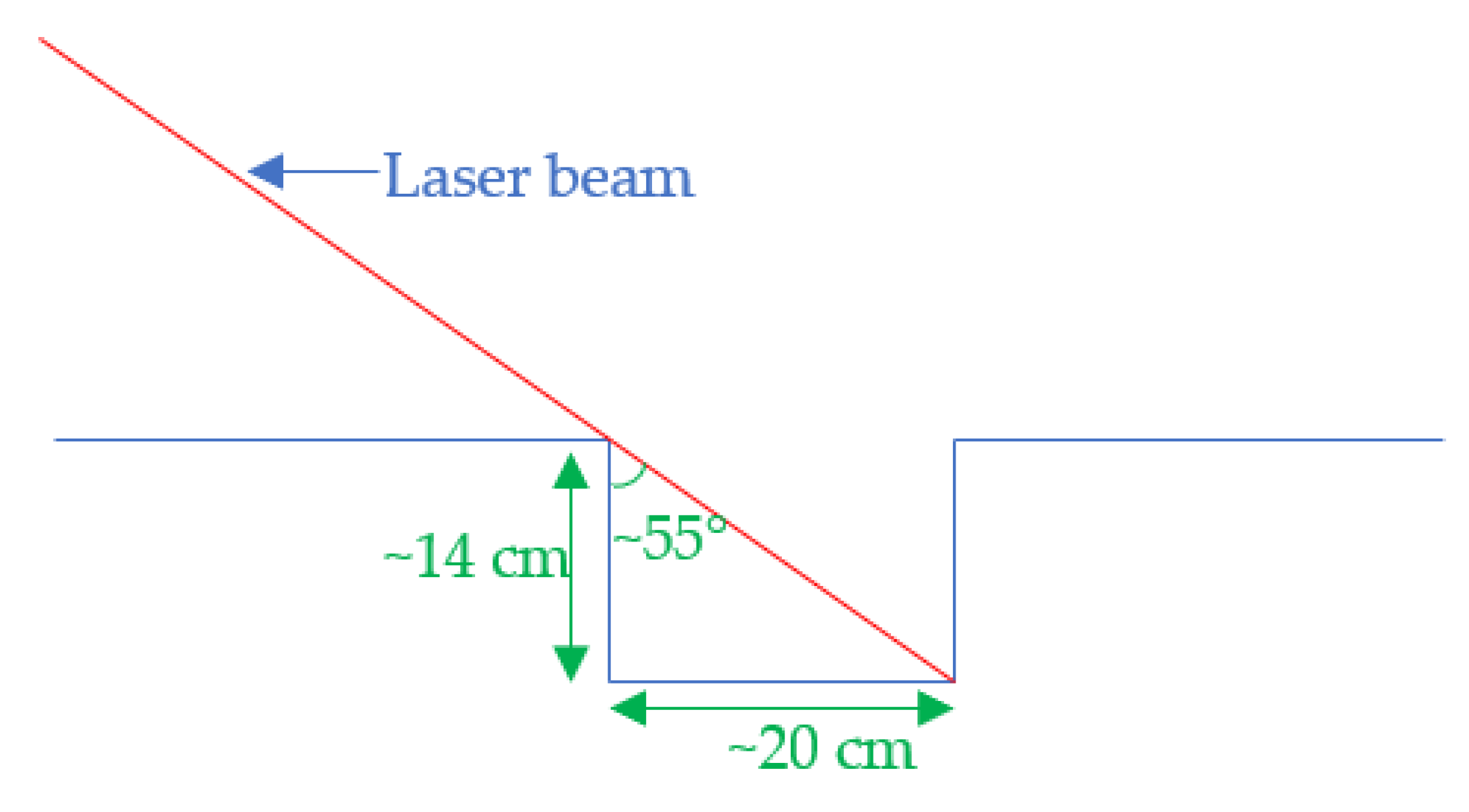
2.3.3. Practical Setup
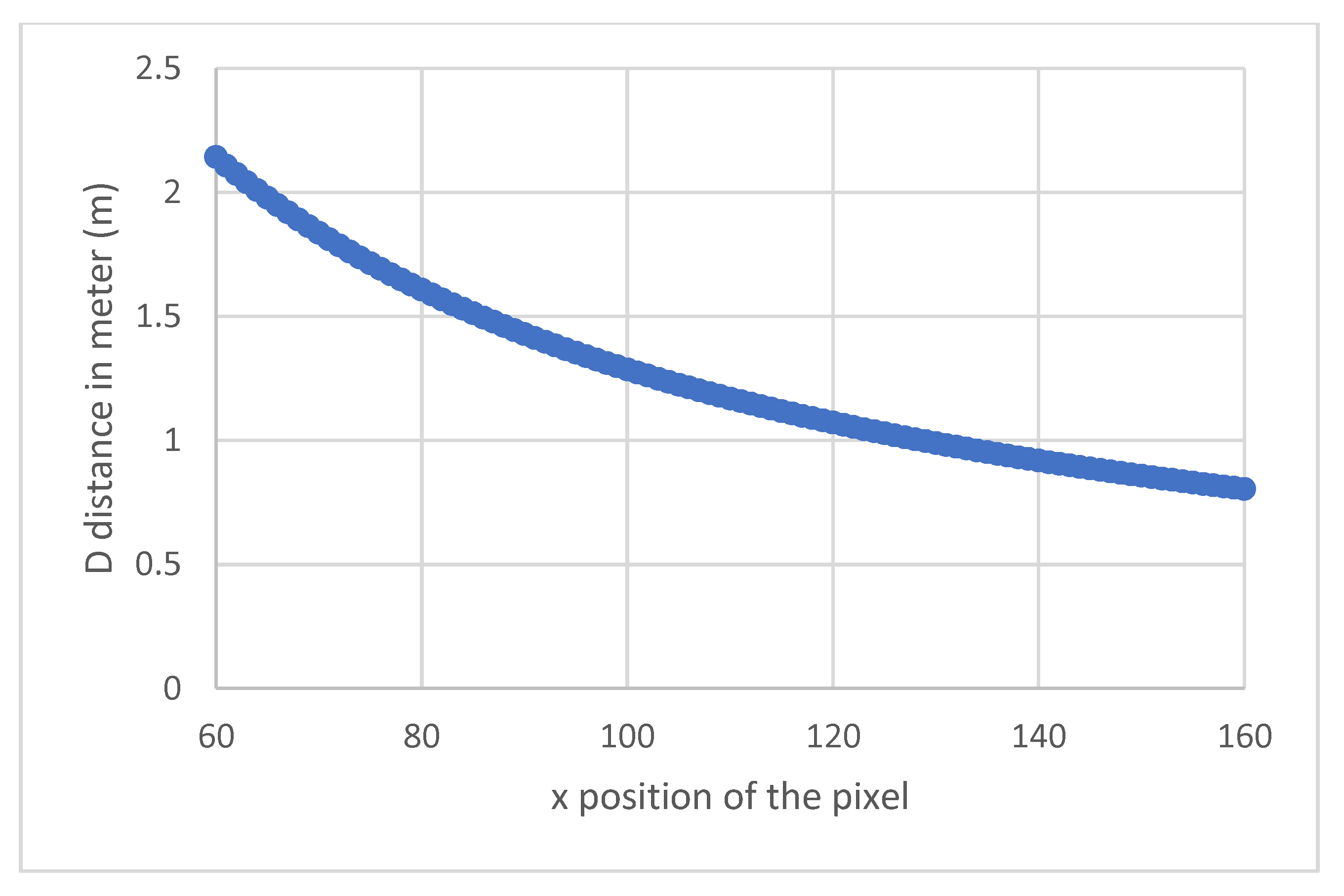
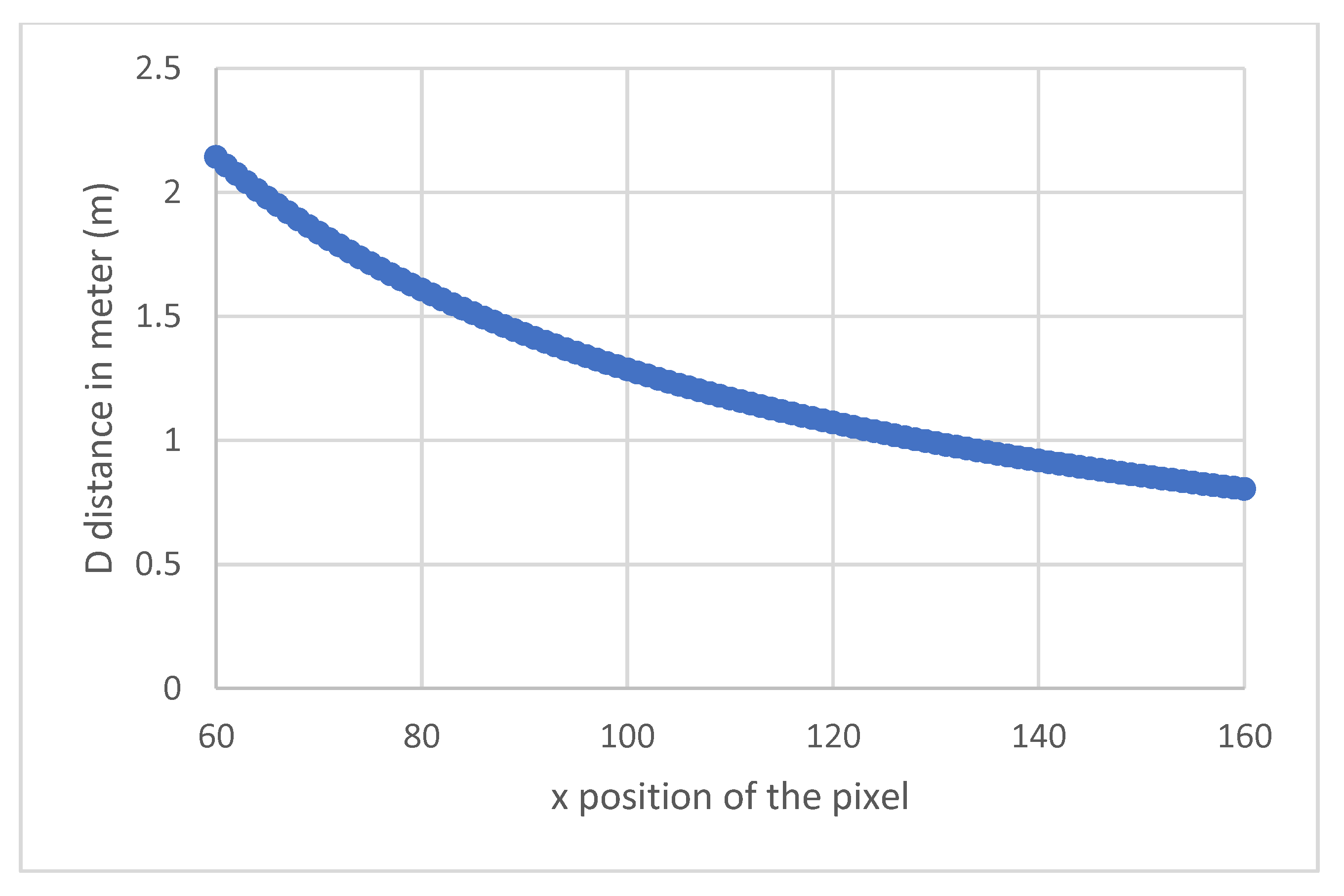
2.3.4. Resolution of the Telemeter
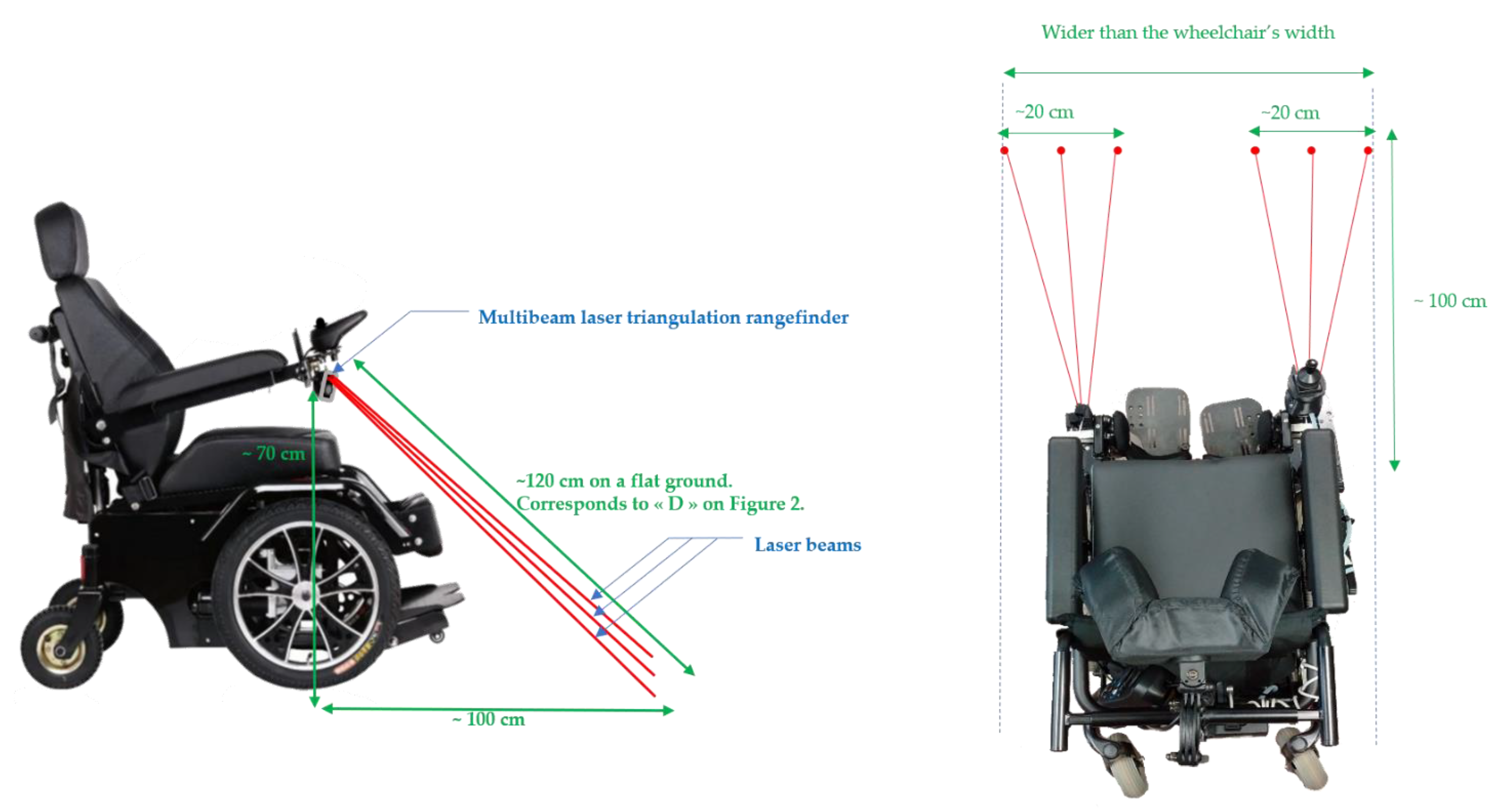
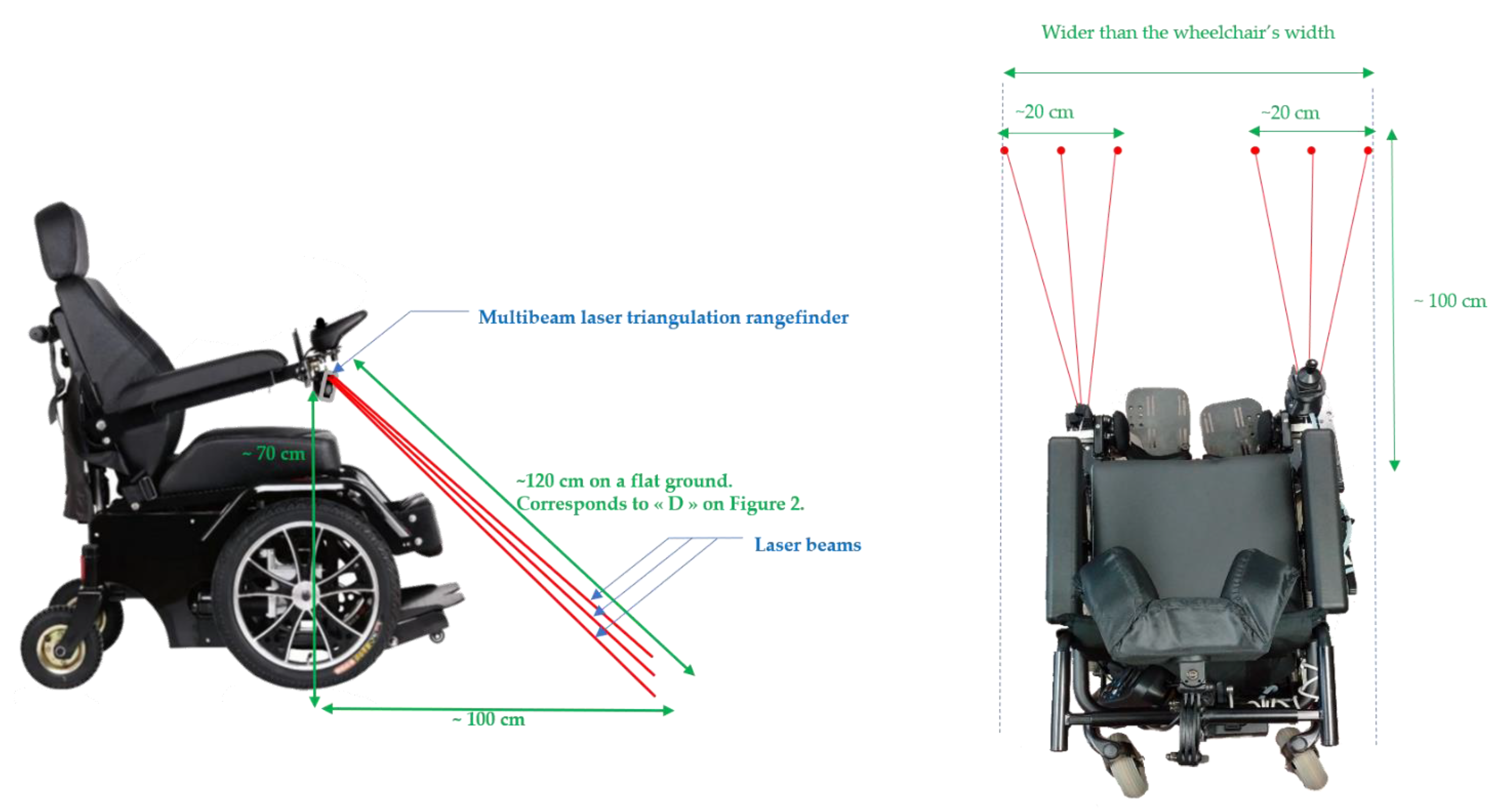
2.3.5. Arrangement
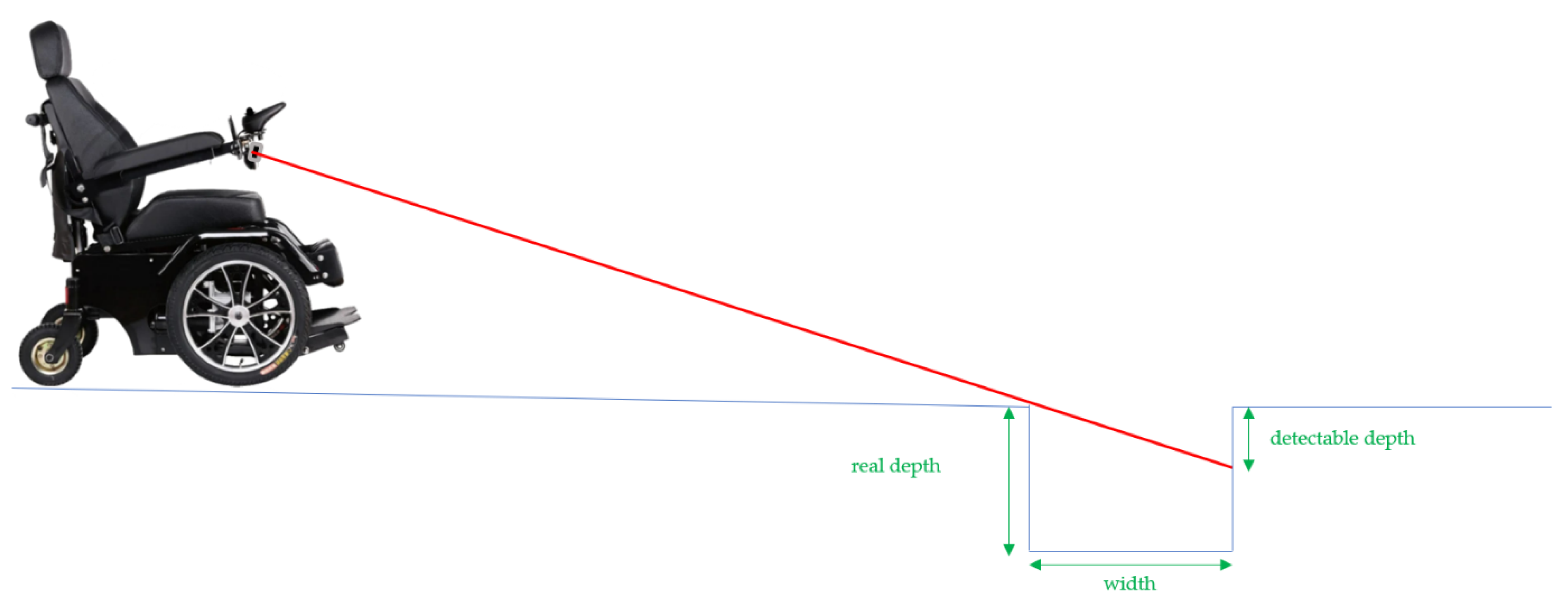
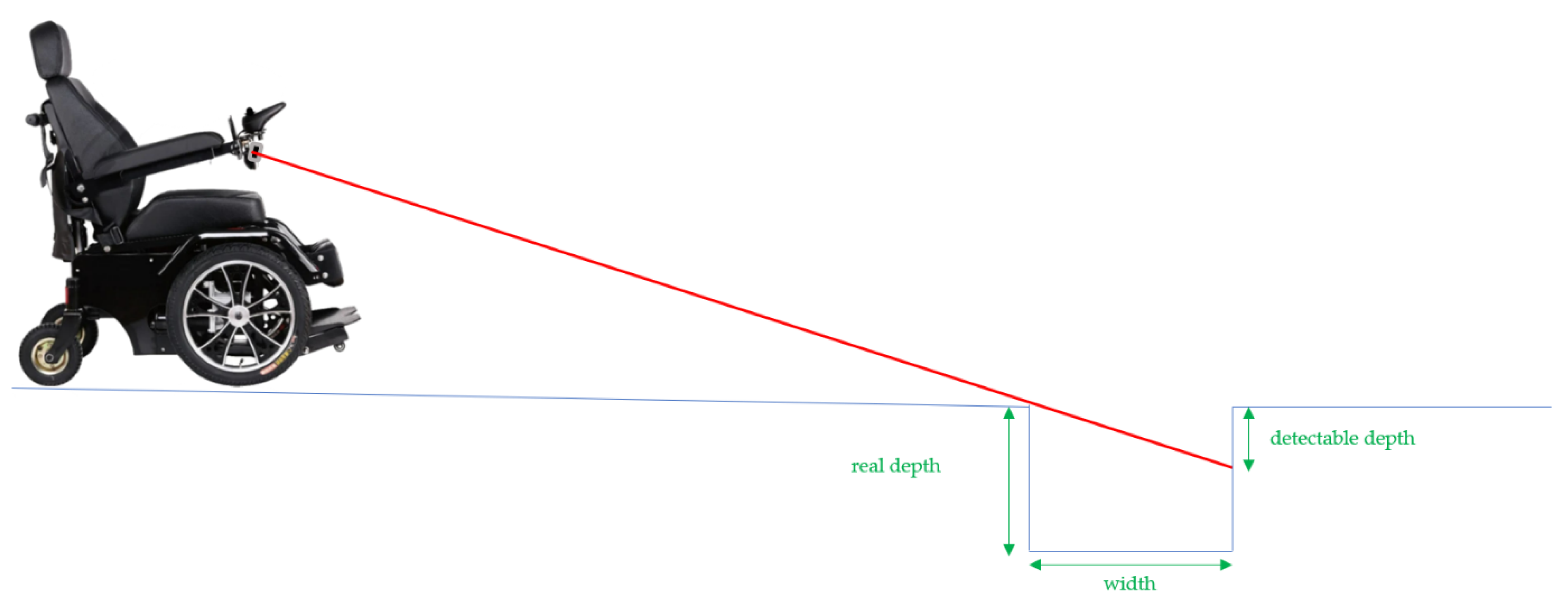
- Concerning the anticipation distance in front of the wheelchair, two criteria must be satisfied. The first one is the necessary braking distance according to the speed of the wheelchair. The second one is the average size of the drop height likely to cause a fall from the wheelchair.
- The braking distance depends on several parameters: the speed of the wheelchair, the weight of the wheelchair and that of the user, the grip of the wheels and the nature of the terrain (slope, granularity, etc.). To obtain an order of magnitude of these distances, we carried out measurements for each speed level, on flat ground with a user with a weight of 70 kg (each measurement was carried out 5 times and then averaged).
3. Results
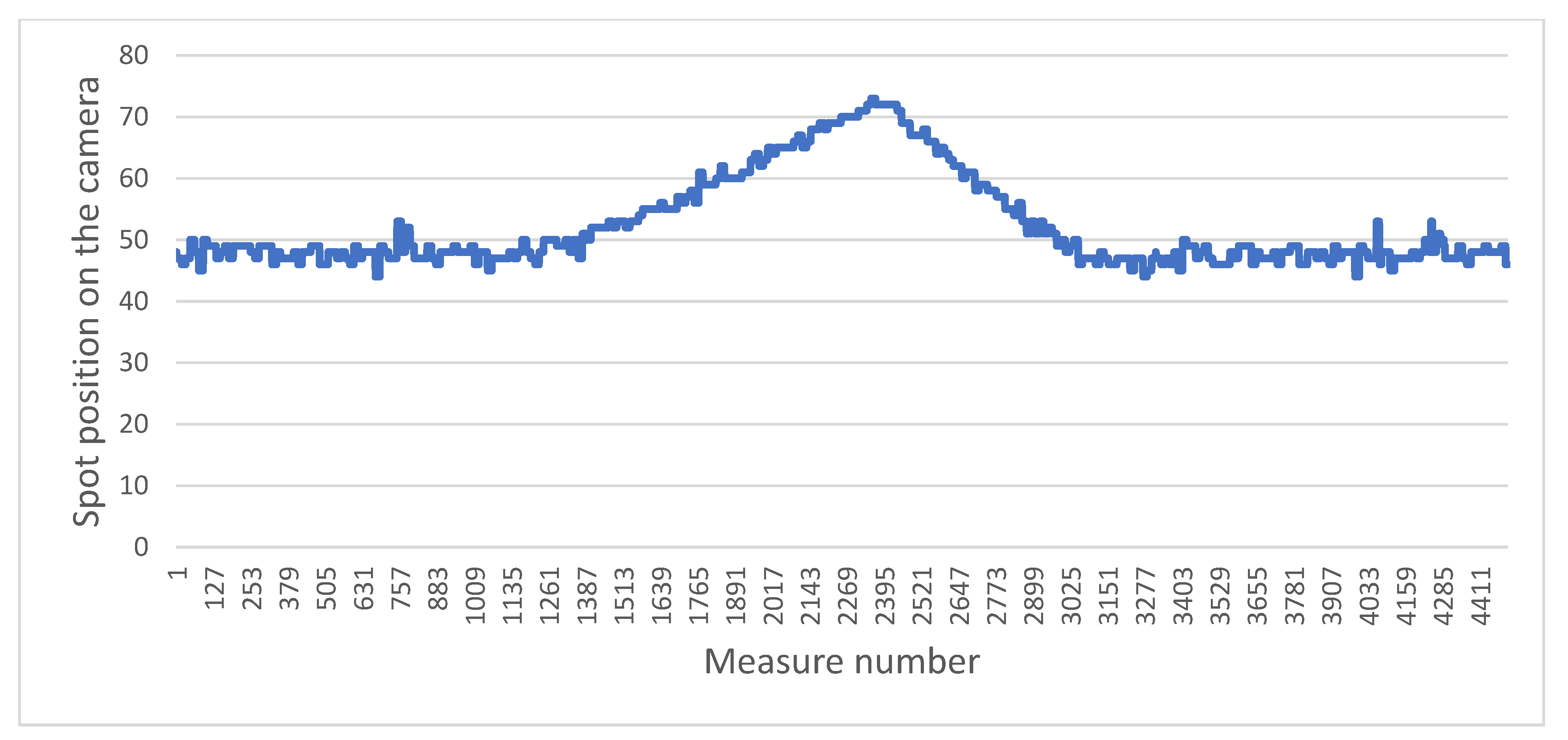
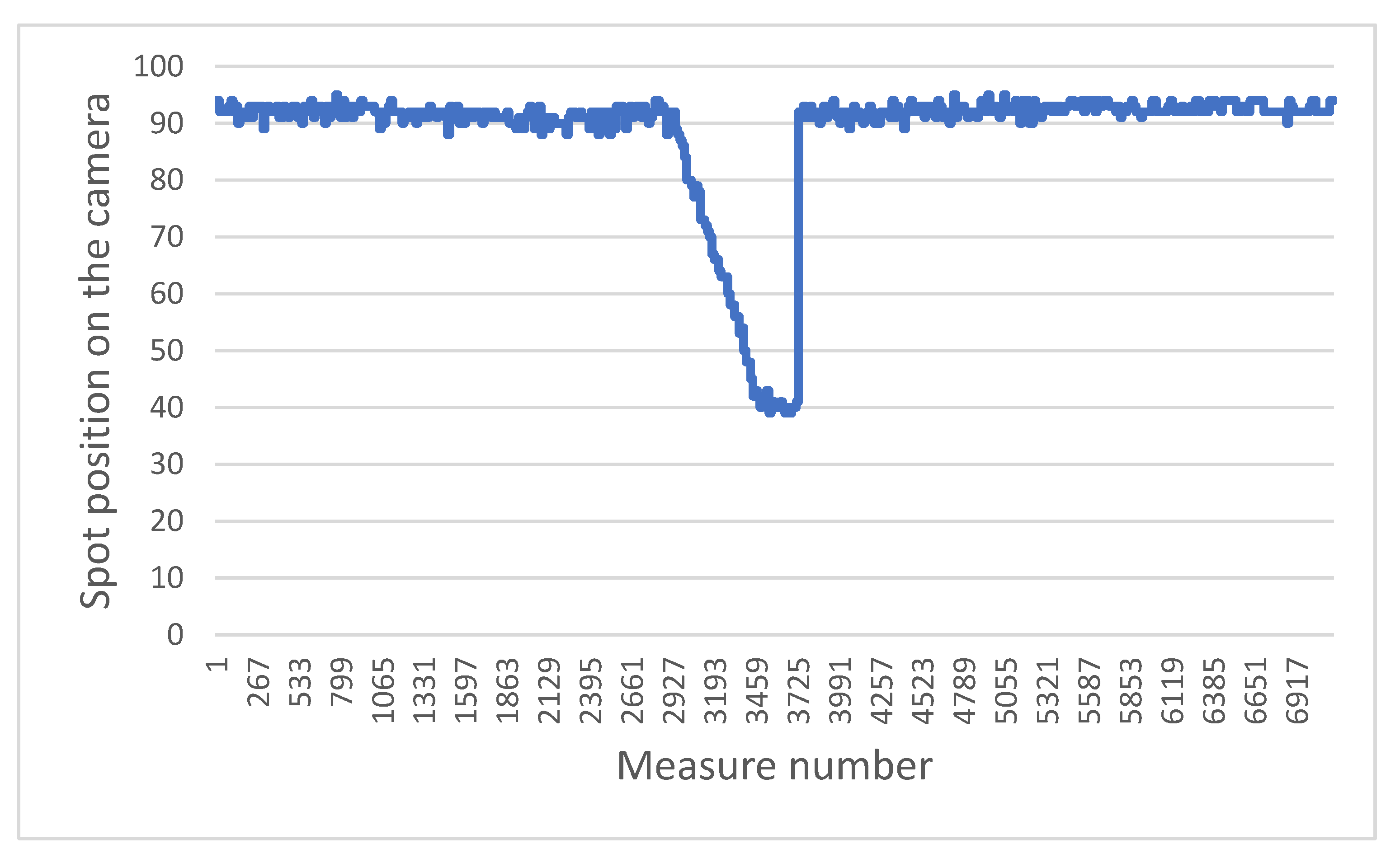
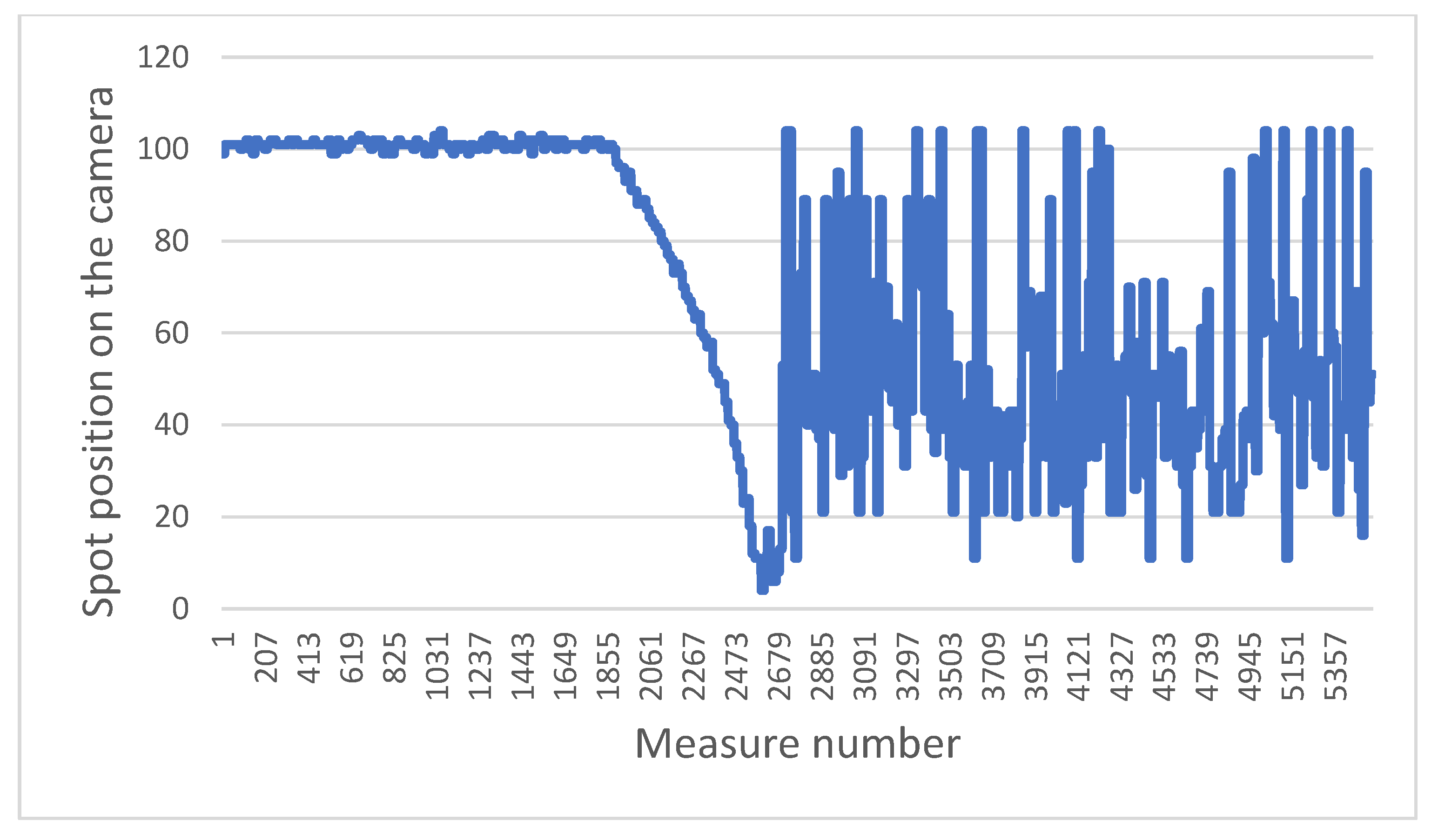
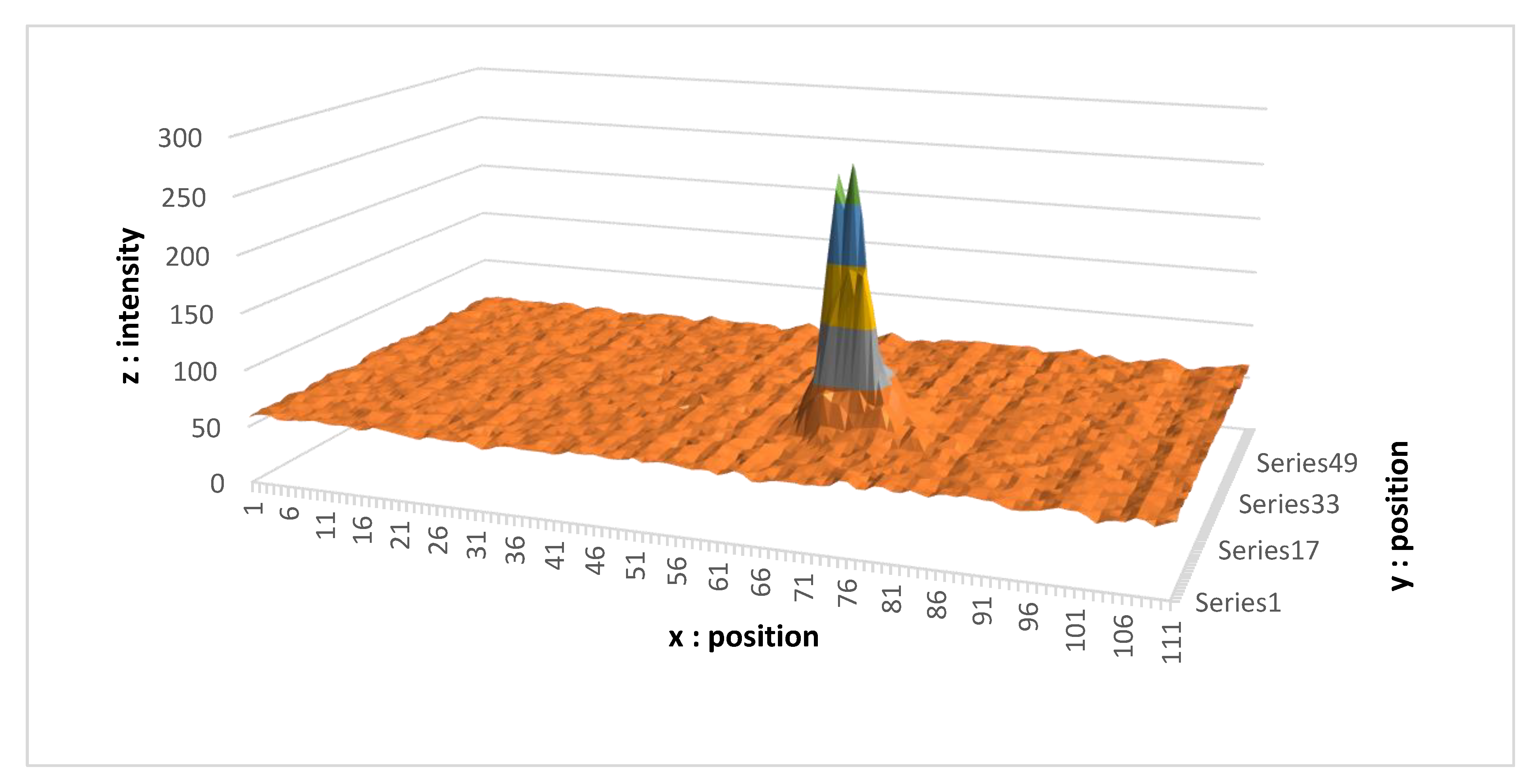
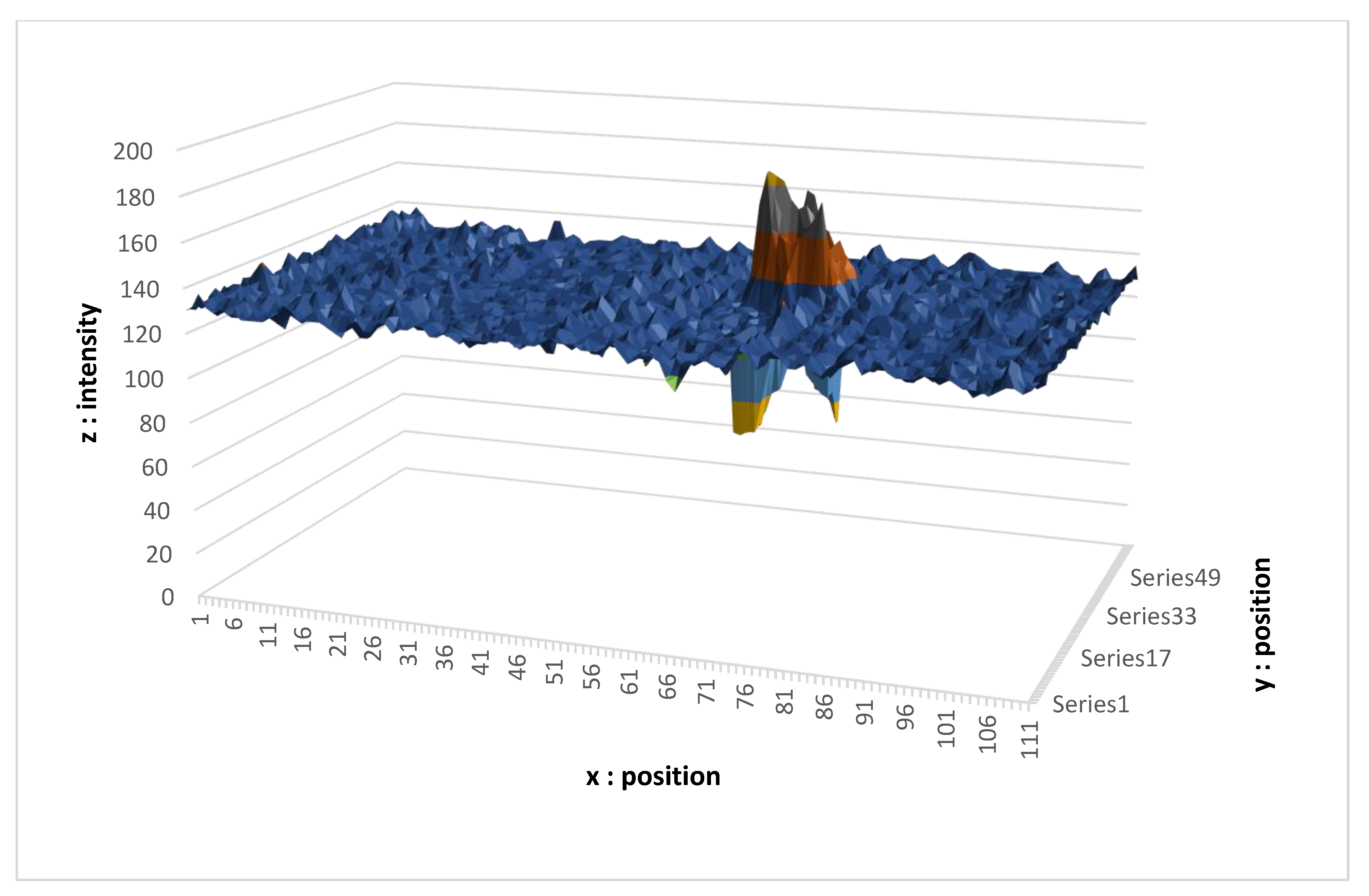
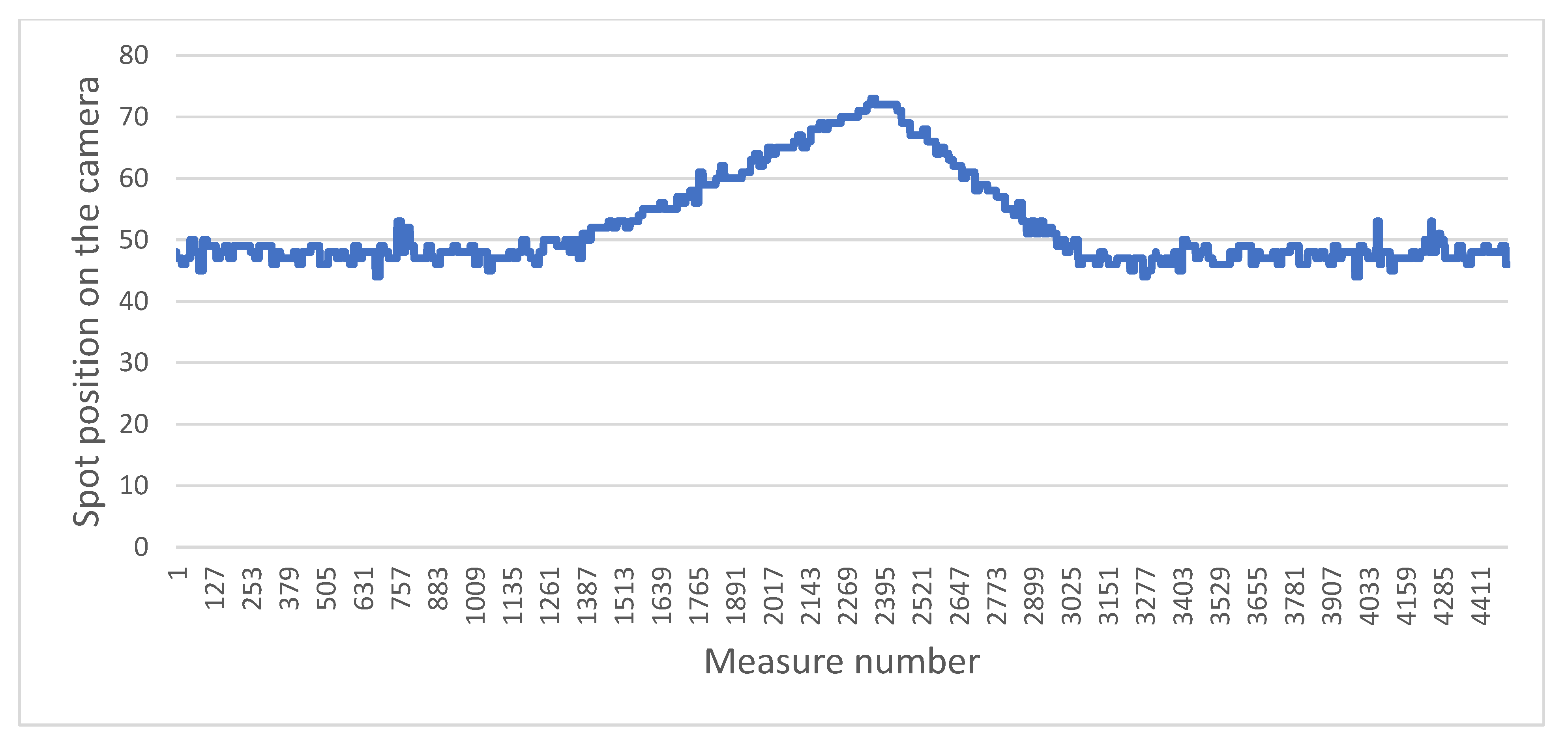
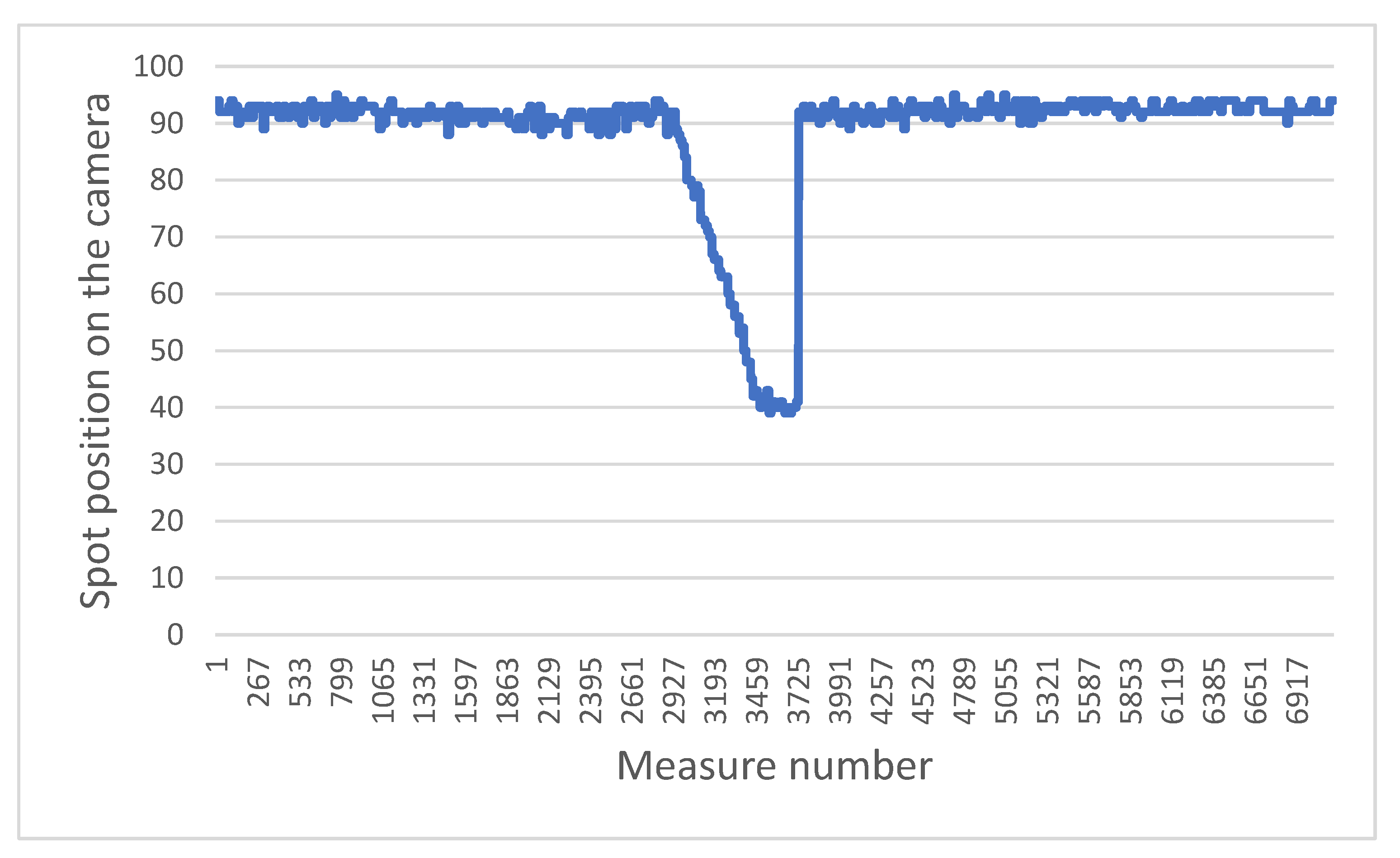
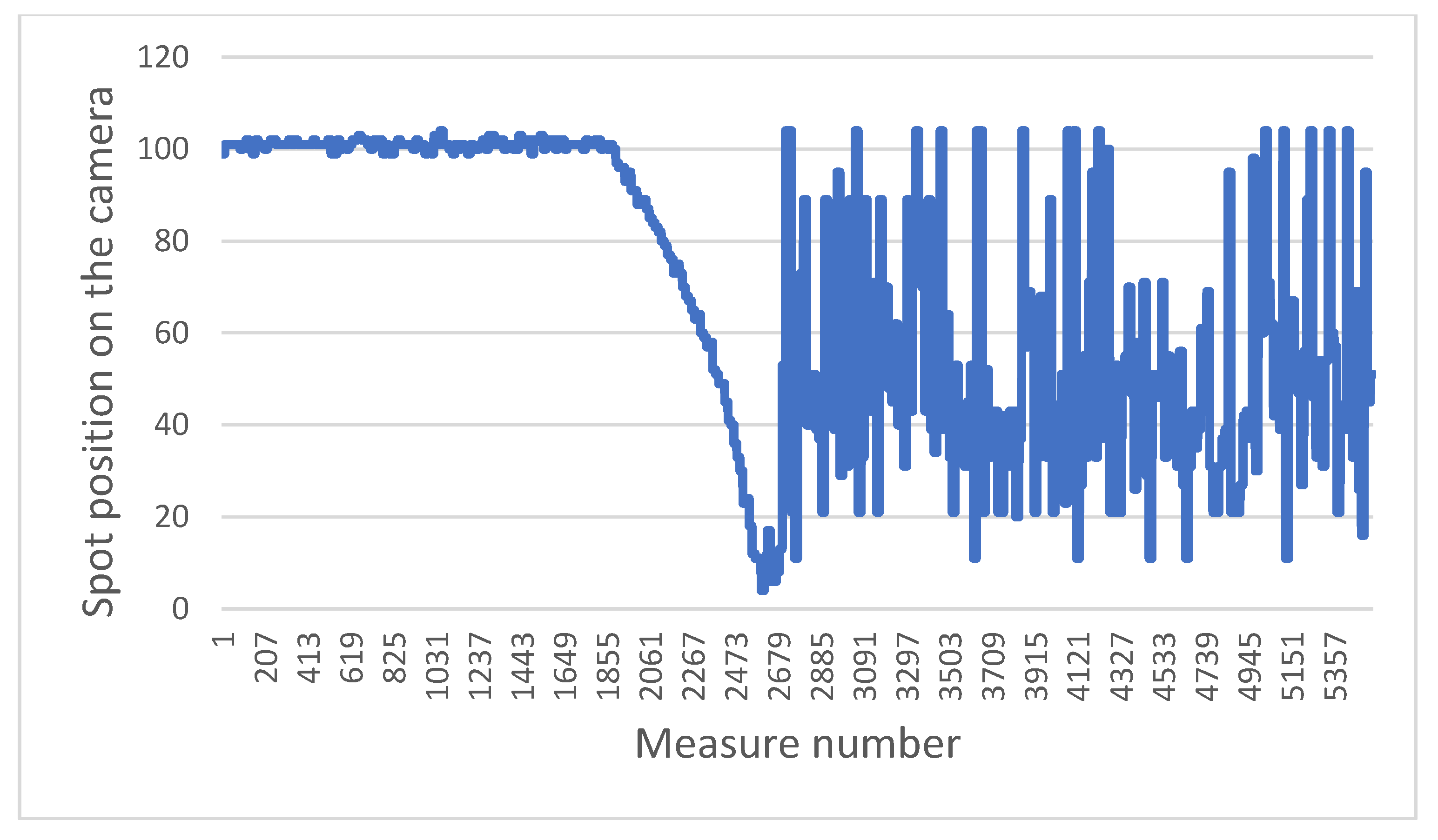
3.1. Signals Obtained
3.2. Algorithms
3.2.1. Determination of Peak
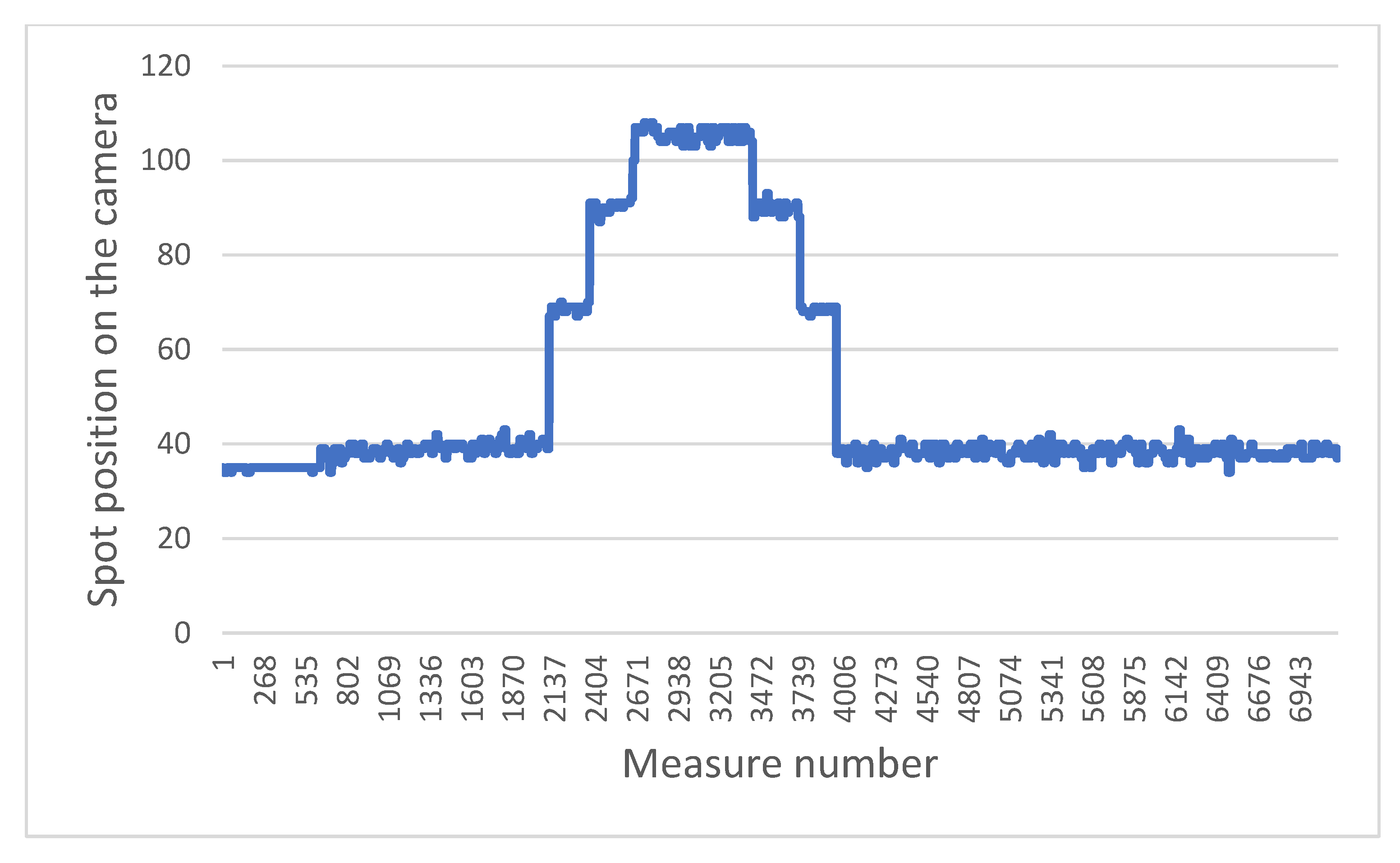
3.2.2. Obtained Curves and Detection of Dangerous Height Differences
3.2.3. Treatment of Random Values
3.2.4. Video Illustrations
4. Discussion
4.1. Relevance of the Developed Sensor
- Its precision, namely 1.5 cm on average in the distance ranges that interest us, is less than or equal to what is generally available on the market (ultrasound sonars, infrared sensors or laser LiDARs, which generally possess a precision equal or inferior to 1 cm). However, 1.5 cm is more than sufficient for determining the possible dangerousness of a drop.
- Its detection field is a bit special and is difficult to compare, since it consists of a point detection, multiplied by the number of points distributed on a line on the ground in front of the wheelchair wheels. This allows better spatial resolution than ultrasonic sonar type sensors or infrared sensors, because these emit a large cone in front of them, not making it possible to evaluate the flatness of the ground.In our opinion our solution is more suited to our context than rotating laser LiDARs, which have difficulty targeting a region on the ground around the wheelchair wheels, and the majority of the measurements of which would be irrelevant because they are in the air due to the rotating nature of this type of device. It would be possible to achieve a detection field similar to ours, or even better, by associating several punctual LiDARs. However, that would be nonsense in terms of congestion and energy consumption.It is necessary to have something that looks like a series of points on the ground, like the operation of the Kinect; however, this type of technology cannot be employed outdoors because of sunlight.
- The measurement rate (cadence) is roughly on the same order of magnitude as most sensors on the market. This is not a big issue here, as the wheelchair equipped with our system moves at a maximum speed of 3 km/h. Considering a frequency of measurement of 30 Hz per point on the ground, it is calculated that the chair can at best travel 2.7 cm between each measurement. This is more than sufficient given the arrangement of the laser beam and the necessary braking distances (see: Section 2.3.5. Arrangement).
- Its robustness of detection makes it possible to correctly detect height differences in all indoor and outdoor conditions, which is only true for high-end LiDARs on the market (Velodyne, Ouster or Sick, for example).Its mechanical robustness, that is to say, its solidity and its capacity to resist over time, is still too weak to be compared to what is available on the market. This is undoubtedly the difference between an experimental system and an industrial system.
- Its dimensions (3.2 cm × 3 cm × 2.2 cm) classify it as a small sensor, easily integrated into the volume of the chair, without anything protruding or obstructing navigation. Unlike punctual or rotating LiDAR sensors, which are typically larger. Even more so if they are robust to sunlight.
- Its consumption (0.5 Watts) is greater than ultrasonic sonars and infrared sensors, but way lower than the LiDARs available on the market, where even the most economical in terms of energy consumes at least 15 W.
- Its price is difficult to evaluate at this time, since this is not an industrial product. Although we have an idea of its current material cost (around EUR 150), it is impossible to assess its real cost, since it is based on several years of research. By way of comparison, an entry-level functional exterior LiDAR is around EUR 2000.
4.2. Wearable Device
4.3. Perspectives
4.3.1. Multibeam
4.3.2. Mechanical Robustness
4.4. User Cases Studies
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Tefft, D.; Guerette, P.; Furumasu, J. Cognitive predictors of young children’s readiness for powered mobility. Dev. Med. Child Neurol. 1999, 41, 665–670. [Google Scholar] [CrossRef] [PubMed]
- Zubek, J.P.; Wilgosh, L. Prolonged Immobilization of the Body: Changes in Performance and in the Electroencephalogram. Science 1963, 19, 306–308. [Google Scholar] [CrossRef] [PubMed]
- Trefler, E.; Fitzgerald, S.G.; Hobson, D.A.; Bursick, T.; Joseph, R. Outcomes of Wheelchair Systems Intervention with Residents of Long-Term Care Facilities. Assist. Technol. 2010, 16, 18–27. [Google Scholar] [CrossRef] [PubMed]
- Keeler, E.; Guralnik, J.M.; Tian, H.; Wallace, R.B.; Reuben, D.B. The Impact of Functional Status on Life Expectancy in Older Persons. J. Gerontol. Ser. A 2010, 65, 727–733. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Levine, S.P.; Bell, D.A.; Jaros, L.A.; Simpson, R.C.; Koren, Y.; Borenstein, J. The NavChair Assistive Wheelchair Navigation System. IEEE Trans. Rehabil. Eng. 1999, 7, 443–451. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Simpson, R.C.; Levine, S.P. NavChair: An Assistive Wheelchair Navigation System with Automatic Adaptation. IEEE Trans. Rehabil. Eng. 1999, 7, 452–463. [Google Scholar] [CrossRef] [PubMed]
- Babel, M.; Pasteau, F.; Guégan, S.; Gallien, P.; Nicolas, B.; Fraudet, B.; Achille-Fauveau, S.; Guillard, D. HandiViz project: Clinical validation of a driving assistance for electrical wheelchair. In Proceedings of the 2015 IEEE International Workshop on Advanced Robotics and its Social Impacts (ARSO), Lyon, France, 30 June–2 July 2015. [Google Scholar]
- Ferrer, S.B.; Kökösy, A.; Capron, J.; Pepper, M.G.; Henderson, M.; Kelly, S.; Gillham, M. Système universel à bas coût d’aide à la conduite d’un fauteuil roulant électrique. Handicap 2014. [Google Scholar] [CrossRef]
- Kokosy, A.; Floquet, T.; Howells, G.; Uk, H.; Pepper, M.G.; Sakel, M.; Donze, C. SYSIASS—An Intelligent Powered Wheelchair. In Proceedings of the International Conference on Systems and Computer Science, Lille, French, 29–31 August 2012. [Google Scholar]
- Mazo, M.; Santiso, E.; Revenga, P.; Rodríguez, F.J.; Lázaro, J.L.; Ureña, J.; García, J.C. Wheelchair for Physically Disabled People with Voice, Ultrasonic and Infrared Sensor Control. Auton. Robot. 1995, 2, 203–224. [Google Scholar] [CrossRef]
- Pires, G.; Honorio, N.; Lopes, C.; Nunes, U.; Almeida, A.T. Autonomous wheelchair for disabled people. In Proceedings of the ISIE ‘97 Proceeding of the IEEE International Symposium on Industrial Electronics, Guimaraes, Portugal, 7–11 July 1997. [Google Scholar]
- Grewal, H.; Matthews, A.; Tea, R.; George, K. LIDAR-based autonomous wheelchair. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Arnay, R.; Hernández-Aceituno, J.; Toledo, J.; Acosta, L. Laser and Optical Flow Fusion for a Non-Intrusive Obstacle Detection System on an Intelligent Wheelchair. IEEE Sens. J. 2018, 18, 3799–3805. [Google Scholar] [CrossRef]
- Md Tomari, M.R.; Kobayashi, Y.; Kuno, Y. Development of Smart Wheelchair System for a User with Severe Motor Impairment. Elsevier Procedia Eng. 2012, 41, 538–546. [Google Scholar] [CrossRef] [Green Version]
- Leaman, J.; La, H.M.; Nguyen, L. Development of a Smart Wheelchair for People with Disabilities. In Proceedings of the IEEE lntemational Conference on Multisensor Fusion and Integration for Intelligent Systems, Baden-Baden, Germany, 19–21 September 2016. [Google Scholar]
- La, H.; Leaman, J. iChair: Intelligent Powerchair for Severely Disabled People. In Proceedings of the The ISSAT International Conference on Modeling of Complex Systems and Environments (MCSE), Da Nang, Vietnam, 8–10 June 2015. [Google Scholar]
- Özçelikörs, M.; Çoşkun, A.; Say, M.G.; Yazici, A.; Yayan, U.; Akçakoca, M. Kinect based Intelligent Wheelchair navigation with potential fields. In Proceedings of the 2014 IEEE International Symposium on Innovations in Intelligent Systems and Applications (INISTA) Proceedings, Alberobello, Italy, 23–25 June 2014; pp. 330–337. [Google Scholar]
- Mittal, R.; Goyal, D. Autonomous Navigation of Smart Wheelchair using Kinect Camera. Int. J. Eng. Tech. Res. 2014, 2, 2. [Google Scholar]
- Utaminingrum, F.; Fauzi, M.A.; Wihandika, R.C.; Adinugroho, S.; Kurniawan, T.A.; Syauqy, D.; Sari, Y.A.; Adikara, P.P. Development of computer vision based obstacle detection and human tracking on smart wheelchair for disabled patient. In Proceedings of the 2017 5th International Symposium on Computational and Business Intelligence (ISCBI), Dubai, United Arab Emirates, 11–14 August 2017. [Google Scholar]
- Satoh, Y.; Sakaue, K. An Omnidirectional Stereo Vision-Based Smart Wheelchair. J. Image Video Proc. 2007, 087646. [Google Scholar] [CrossRef]
- Takei, T.; Suzuki, Y.; Matsumoto, O.; Adachi, Y.; Sasaki, Y.; Kamo, M. Development of assistive technologies for safe operation of electric wheelchairs on sloping sidewalks and grade height differences. In Proceedings of the 2010 IEEE/SICE International Symposium on System Integration, Sendai, Japan, 21–22 December 2010; pp. 43–48. [Google Scholar]
- Devigne, L.; Pasteau, F.; Nicolas, L.B.; Marie, B.; Tome, C.; Philippe, G. Assistance à la conduite de fauteuil roulant électrique (FRE) sur un trottoir: Une preuve de concept. In Proceedings of the IFRATH 2018—10ème Conférence sur les Aides Techniques pour les Personnes en Situation de Handicap, Paris, France, 13–15 June 2018; pp. 1–6. [Google Scholar]
- Karunasekera, H.; Zhang, H.; Xi, T.; Wang, H. Stereo vision based negative obstacle detection. In Proceedings of the 2017 13th IEEE International Conference on Control & Automation (ICCA), Ohrid, Macedonia, 3–6 July 2017; pp. 834–838. [Google Scholar]
- Larson, J.; Trivedi, M. Lidar based off-road negative obstacle detection and analysis. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 192–197. [Google Scholar]
- Available online: https://medium.com/conscious-life/why-my-wheelchair-is-a-part-of-my-body-and-what-this-means-for-you-f1635acfa8d4 (accessed on 20 September 2021).
- Available online: https://eminetra.co.nz/the-brain-may-treat-the-wheelchair-as-part-of-the-body/205573/ (accessed on 20 September 2021).
- Scandola, M.; Togni, R.; Tieri, G.; Avesani, R.; Brambilla, M.; Aglioti, S.M.; Moro, V. Embodying their own wheelchair modifies extrapersonal space perception in people with spinal cord Injury. Exp. Brain Res. 2019, 237, 2621–2632. [Google Scholar] [CrossRef] [PubMed]
- Villanueva, J.; Farcy, R. Optical Device Indicating a Safe Free Path to Blind People. IEEE Trans. Instrum. Meas. 2011, 61, 170–177. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measured Speed (km/h) | Braking Distance (cm) |
|---|---|
| 2.1 | 34 |
| 3.0 | 66.5 |
| 6.4 | 122.2 |
| 8.8 | 184.3 |
| 10.5 | 217.2 |
| User’s Profile | Assessment of Tests | Observations |
|---|---|---|
| Post-adolescent man. Congenital disease resulting in loss of sensitivity of the limbs and near blindness. | Very satisfactory | Very good adaptation to the system, is beginning to concretely use it daily, in an autonomous way, under supervision. |
| Pre-teenage girl with cerebral palsy. Rough hand control. | Satisfactory | Good progress and unhindered navigation. The system may be useful for this user. |
| Child with cerebral palsy and cognitive impairment. Unaware of the danger. | Moderate to satisfactory | Function correctly fulfilled by our system, but the unconsciousness of the danger and the established rules do not allow a secure employment. |
| Adult in his forties. Blind and paraplegic. | Moderate | Function correctly fulfilled by our system but the spatial representation it implies and the need to adapt to it is difficult for some, especially over a certain age. |
| Young man with cerebral palsy, total blindness, severely cognitive impaired, great difficulty in taking initiative. | Unsatisfactory | The system is useless in this situation, since the user does not initiate any movement. |
| Teenage boy with mild cerebral palsy, sufficient hand control, difficulty perceiving the relief on the ground. | Unsatisfactory | Our system is too secure and frustrating for its capabilities. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Favey, C.; Farcy, R.; Donnez, J.; Villanueva, J.; Zogaghi, A. Development of a New Negative Obstacle Sensor for Augmented Electric Wheelchair. Sensors 2021, 21, 6341. https://doi.org/10.3390/s21196341
Favey C, Farcy R, Donnez J, Villanueva J, Zogaghi A. Development of a New Negative Obstacle Sensor for Augmented Electric Wheelchair. Sensors. 2021; 21(19):6341. https://doi.org/10.3390/s21196341
Chicago/Turabian StyleFavey, Clément, René Farcy, Julien Donnez, Jose Villanueva, and Aziz Zogaghi. 2021. "Development of a New Negative Obstacle Sensor for Augmented Electric Wheelchair" Sensors 21, no. 19: 6341. https://doi.org/10.3390/s21196341
APA StyleFavey, C., Farcy, R., Donnez, J., Villanueva, J., & Zogaghi, A. (2021). Development of a New Negative Obstacle Sensor for Augmented Electric Wheelchair. Sensors, 21(19), 6341. https://doi.org/10.3390/s21196341