
Practical Particulate Matter Sensing and Accurate Calibration System Using Low-Cost Commercial Sensors


Abstract
:1. Introduction
2. Related Work
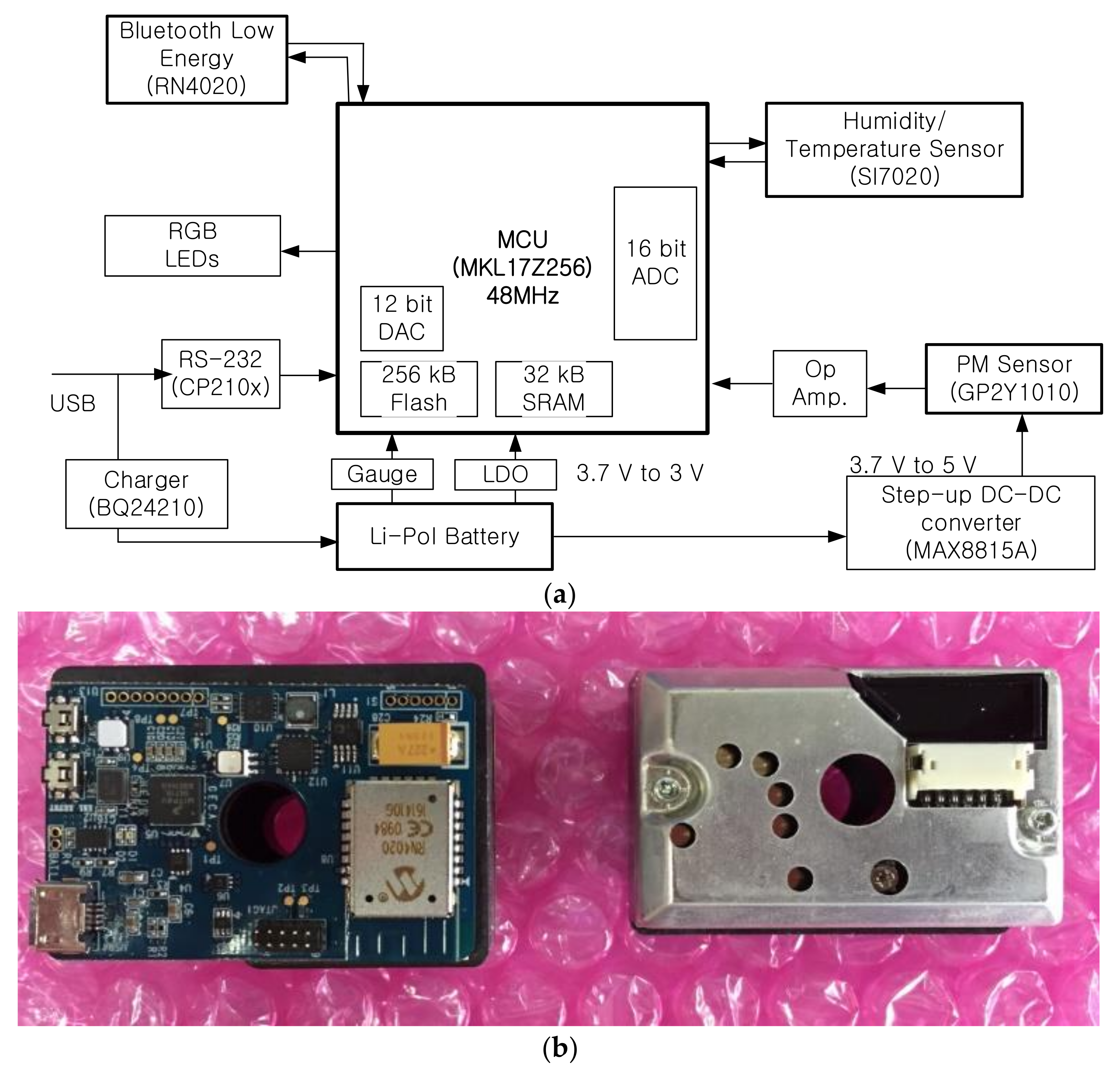
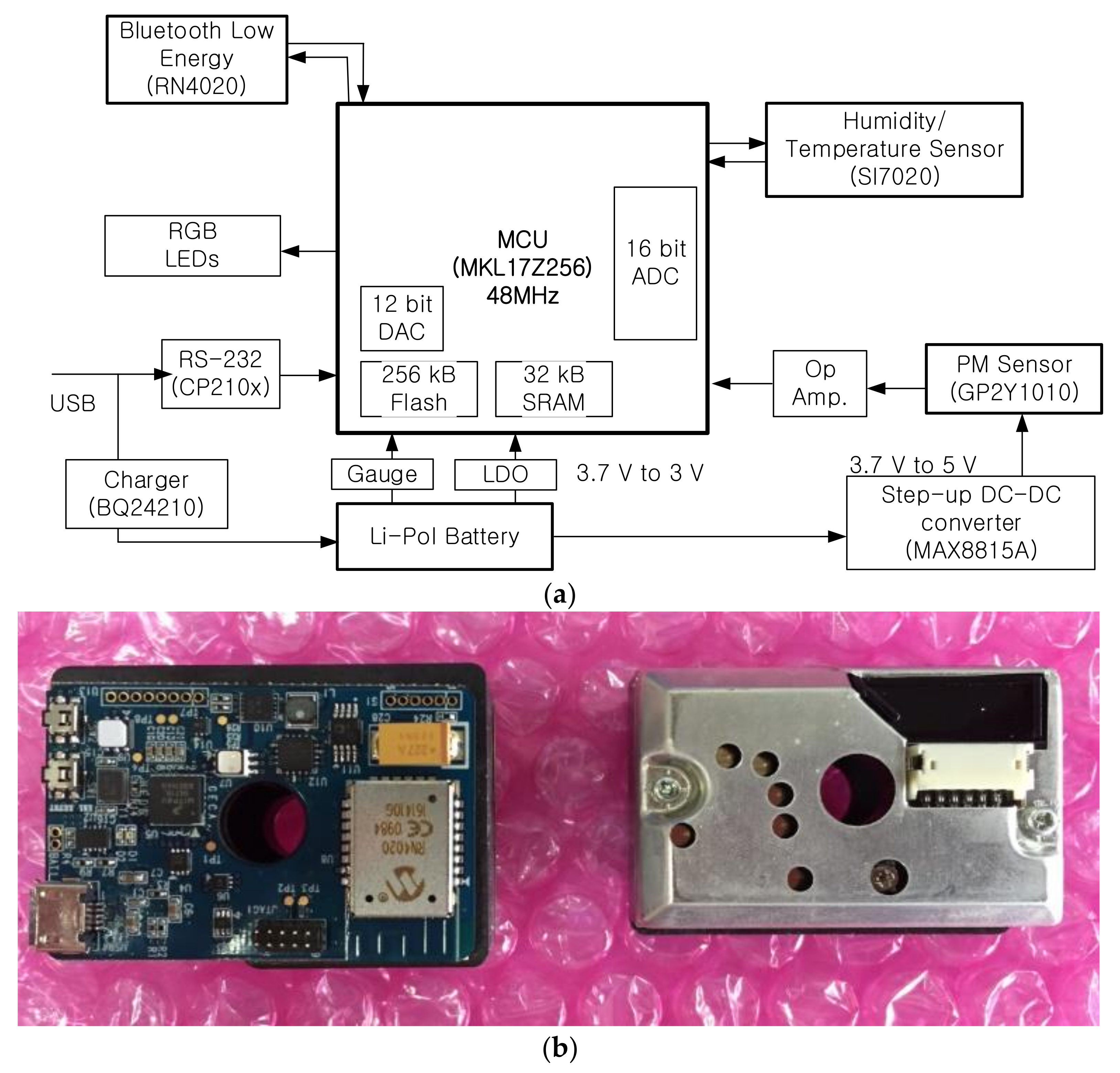
3. Particulate Matter Sensing and Calibration System
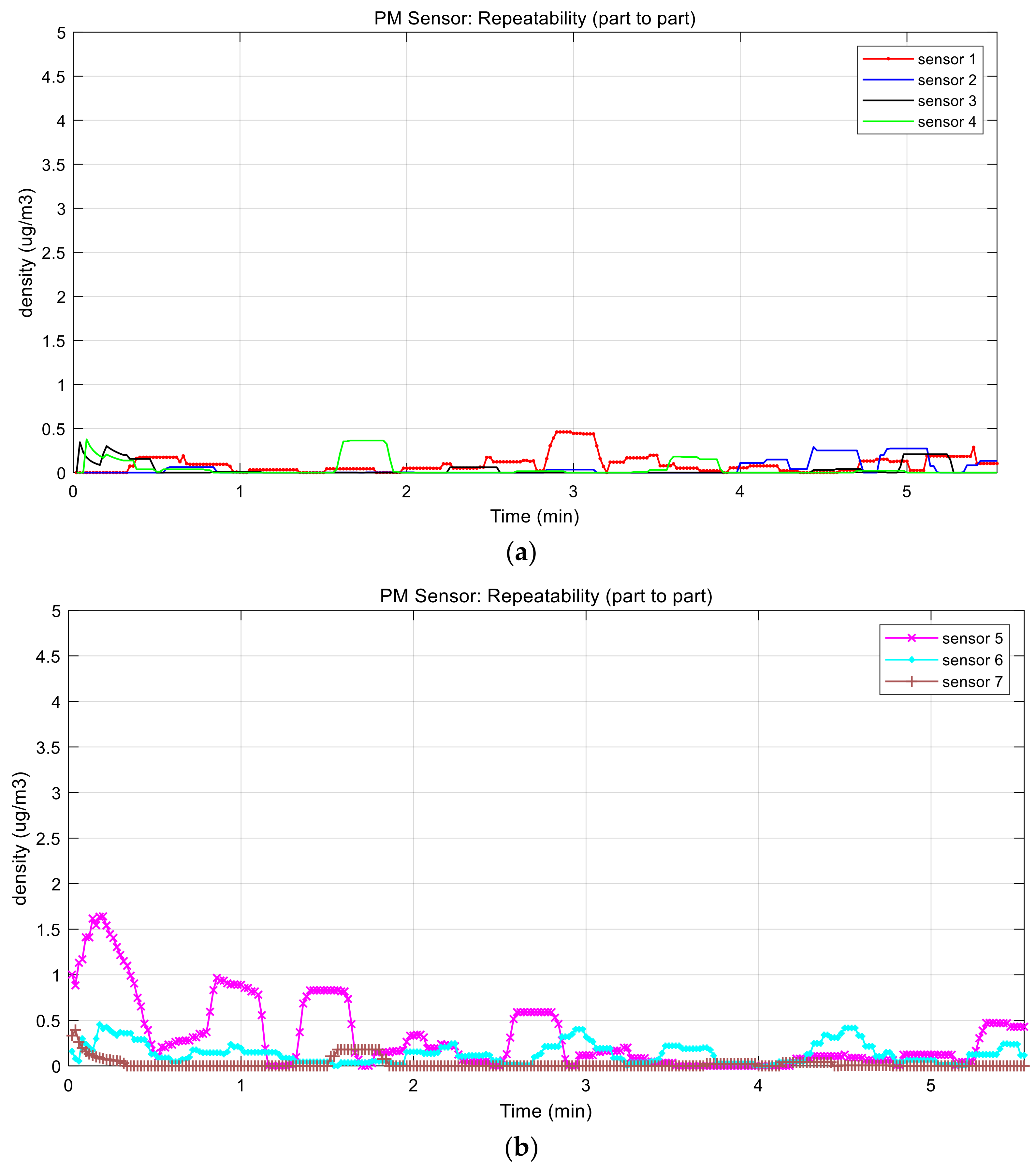
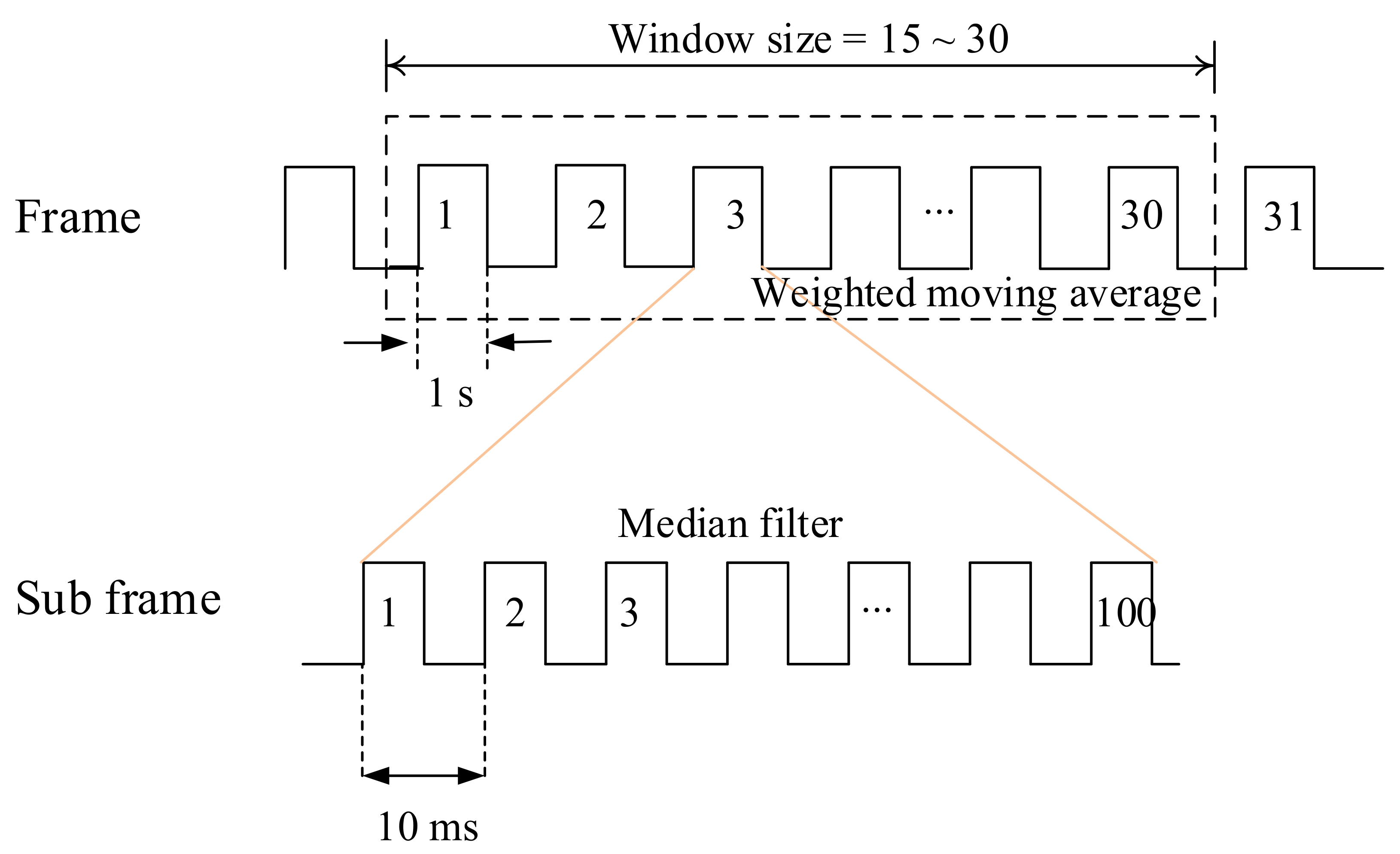
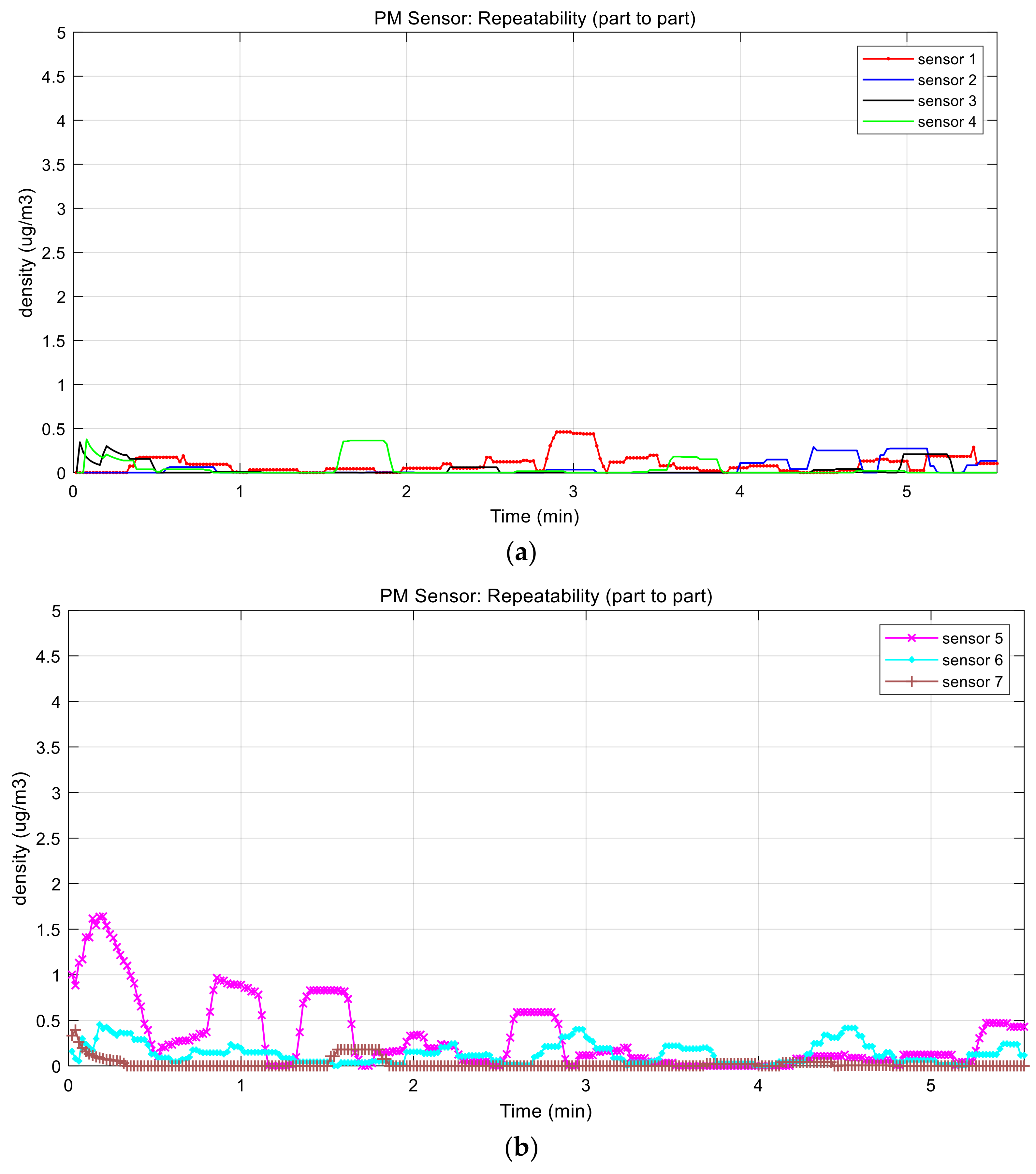
4. Accurate Calibration Using Low-Cost Commercial Sensors
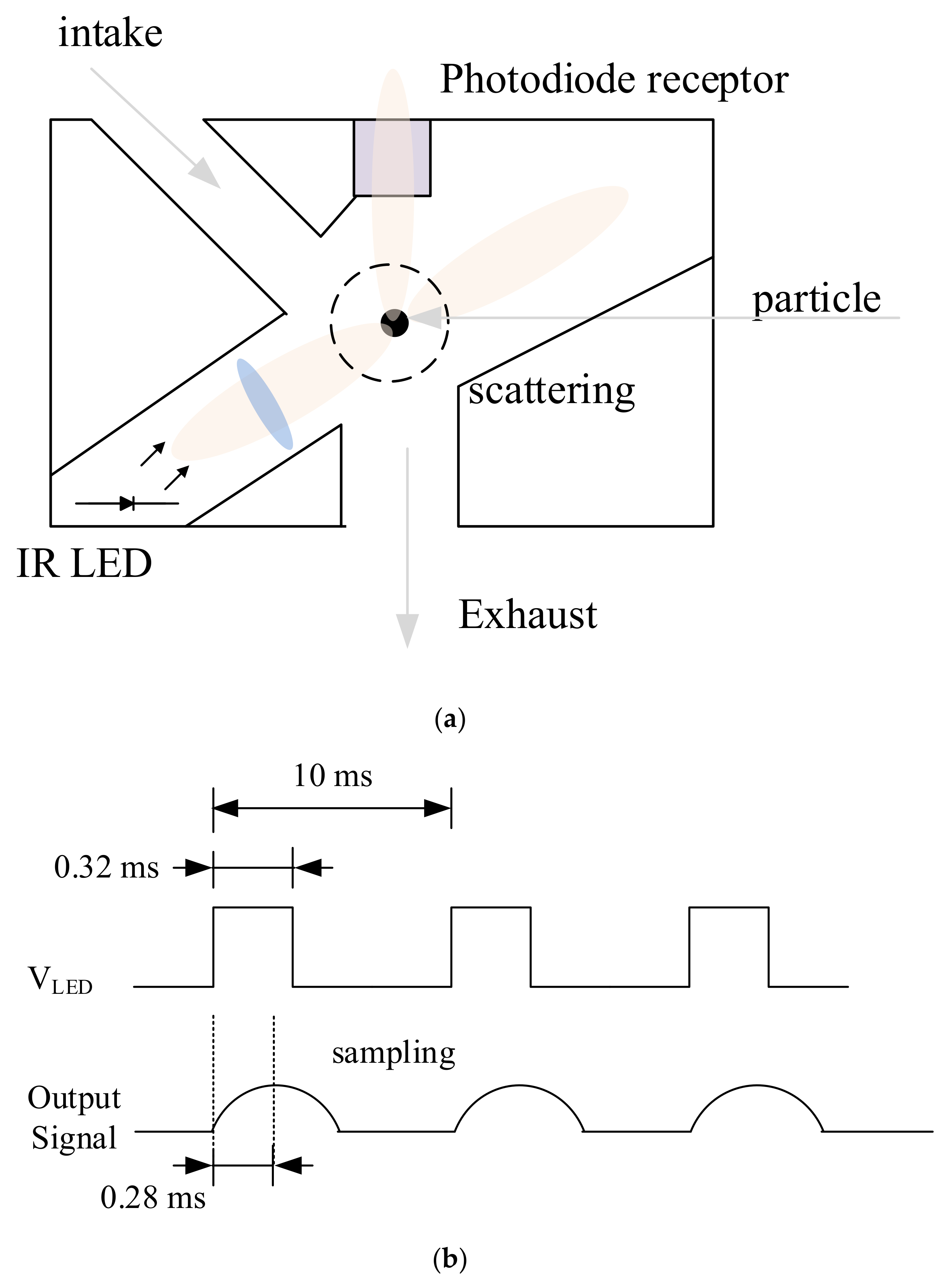
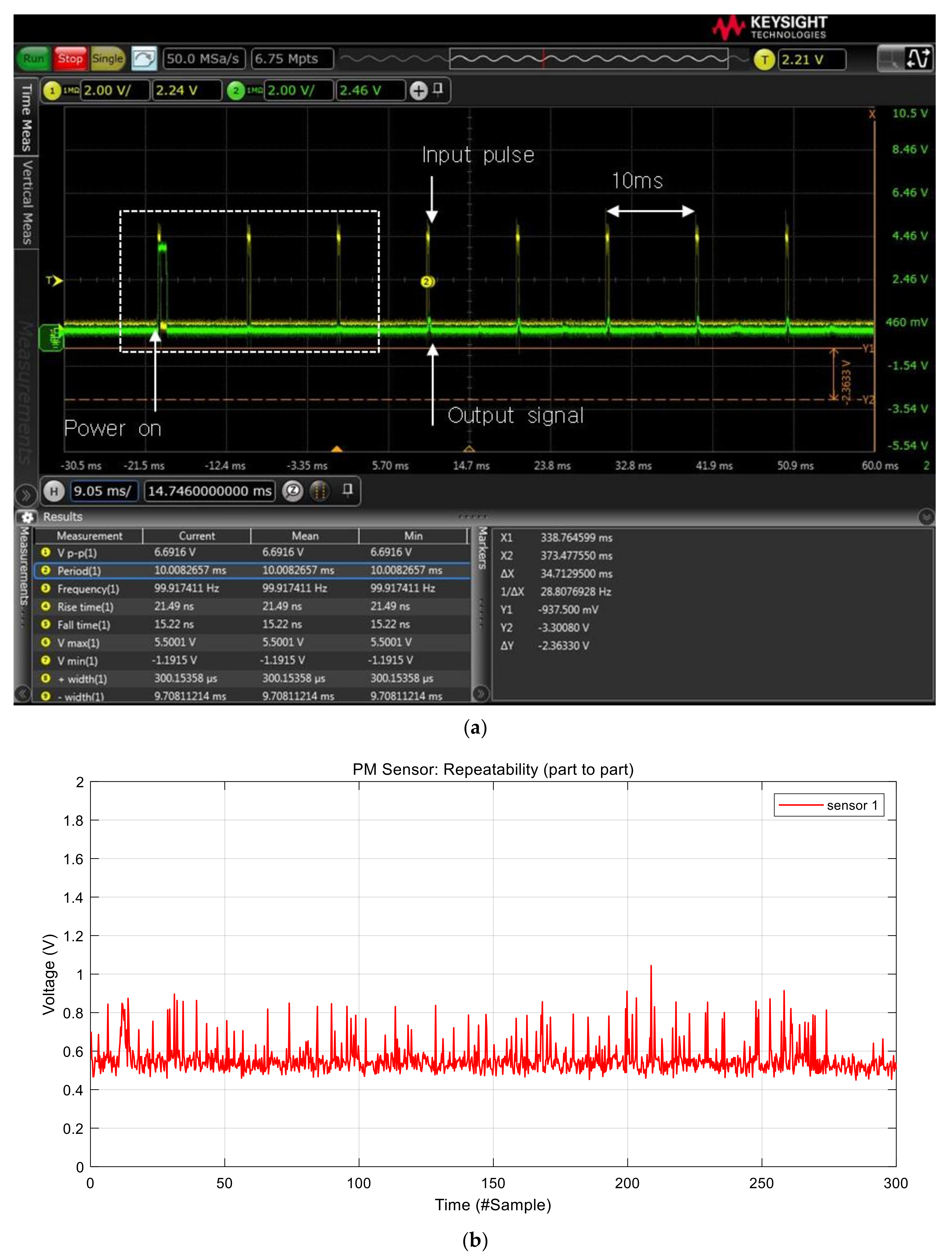
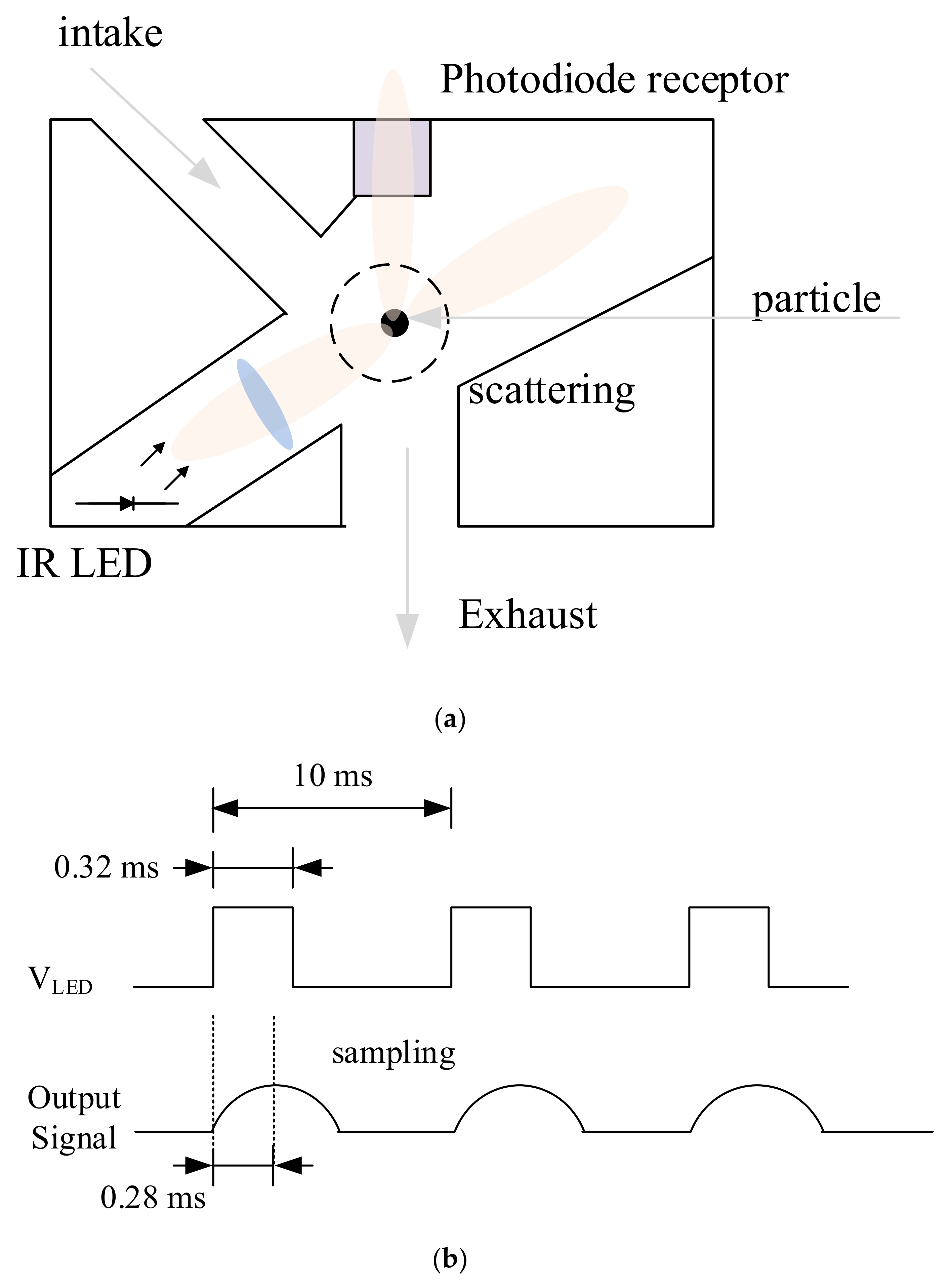
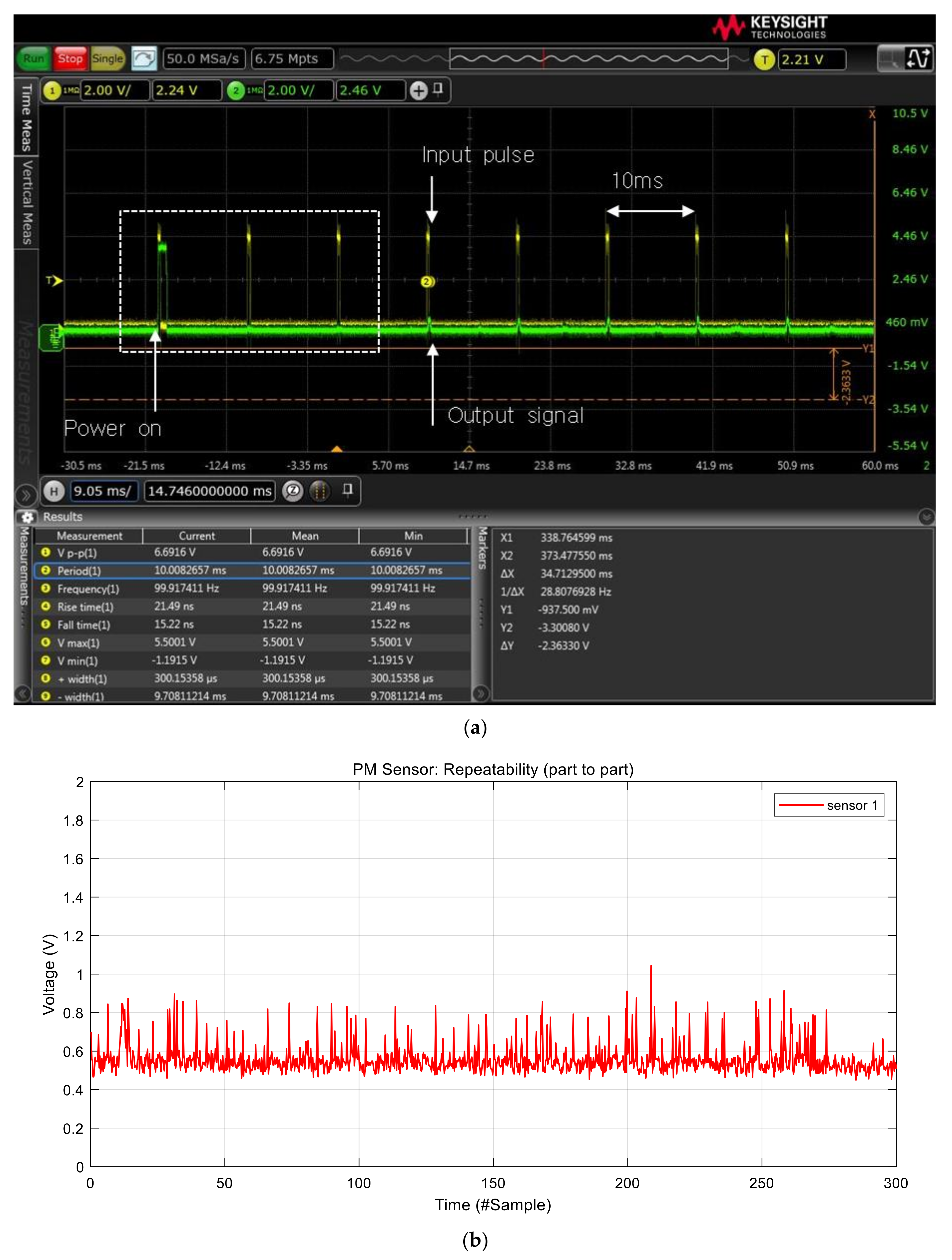
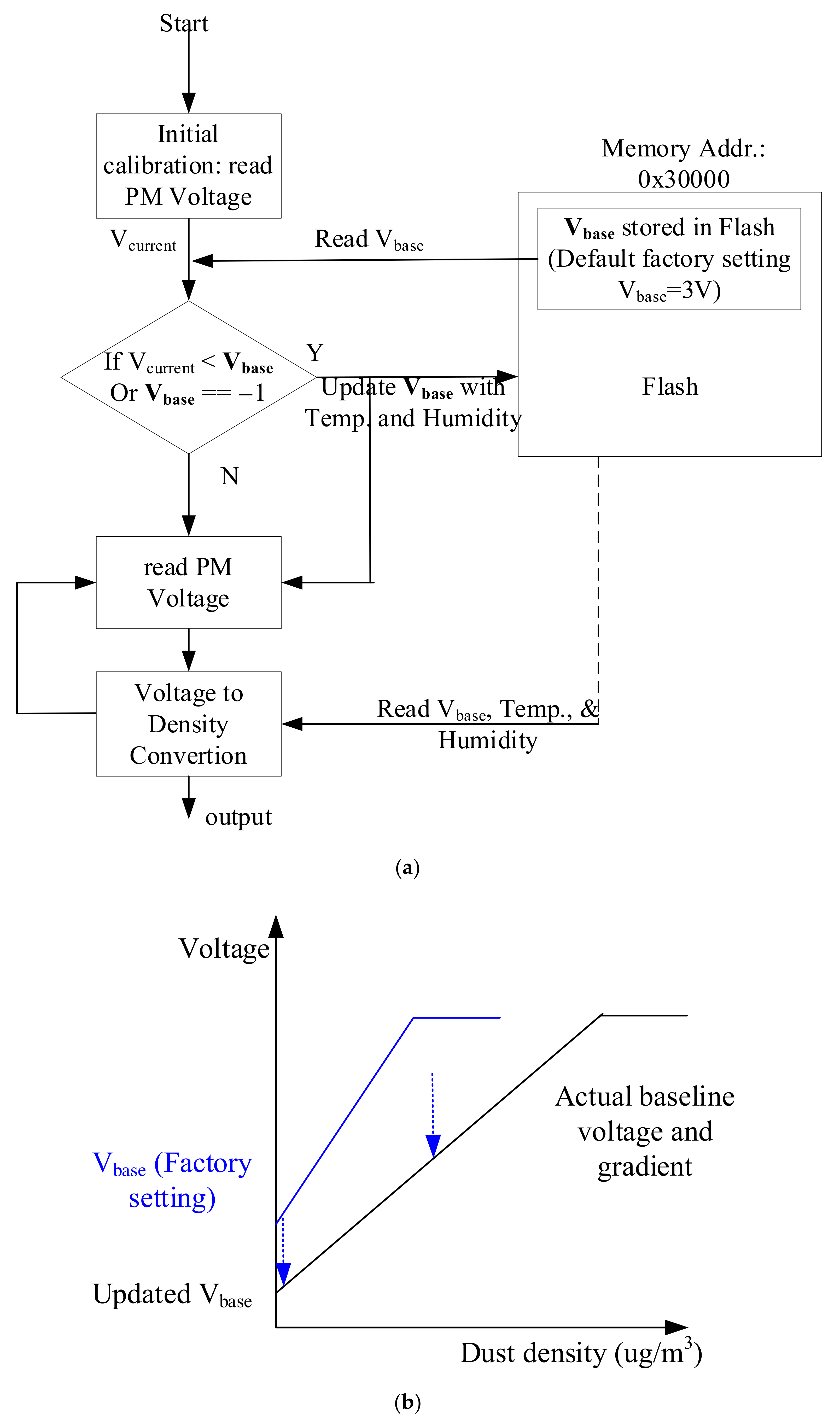
4.1. Operation Principle of the PM Sensor
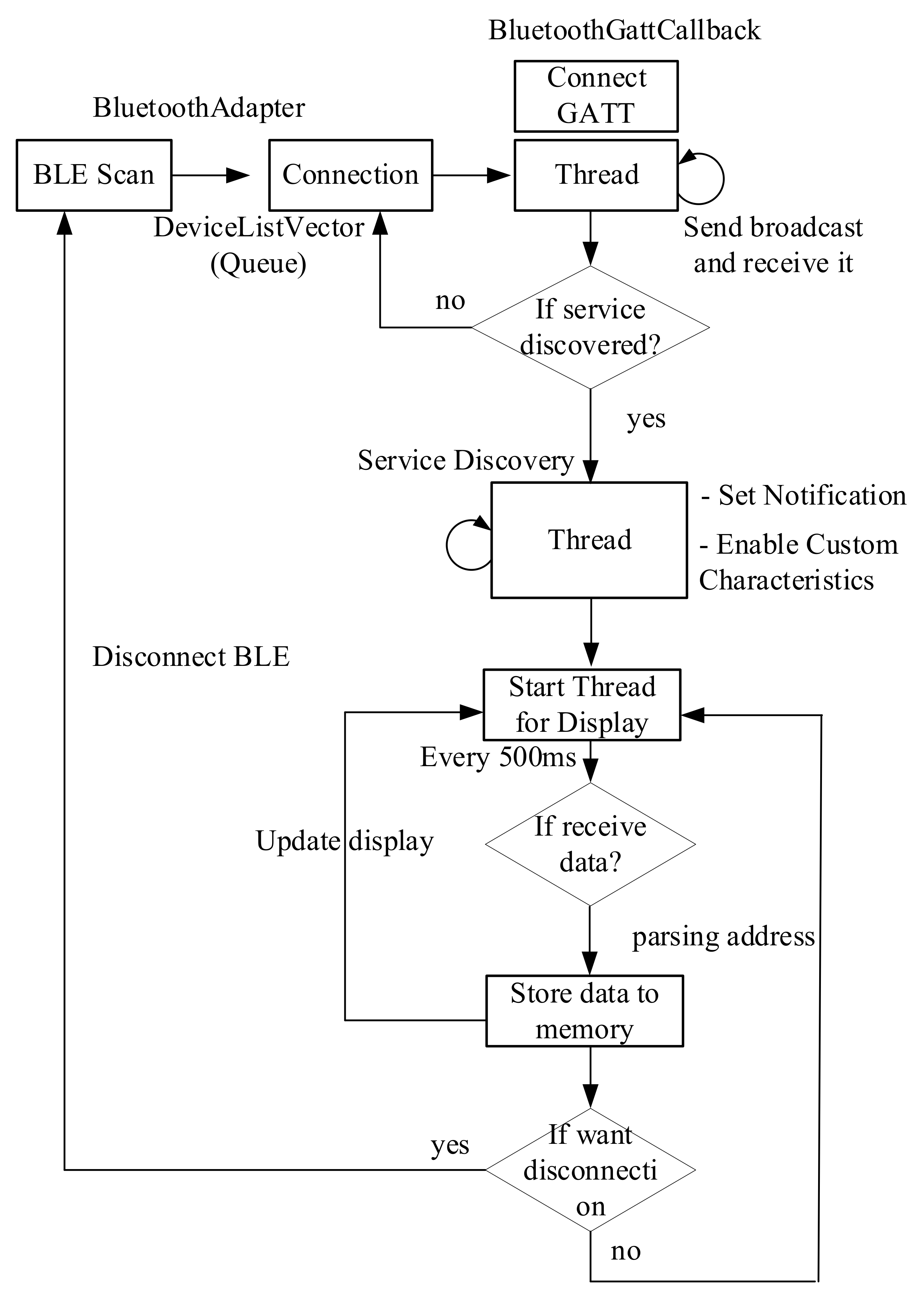
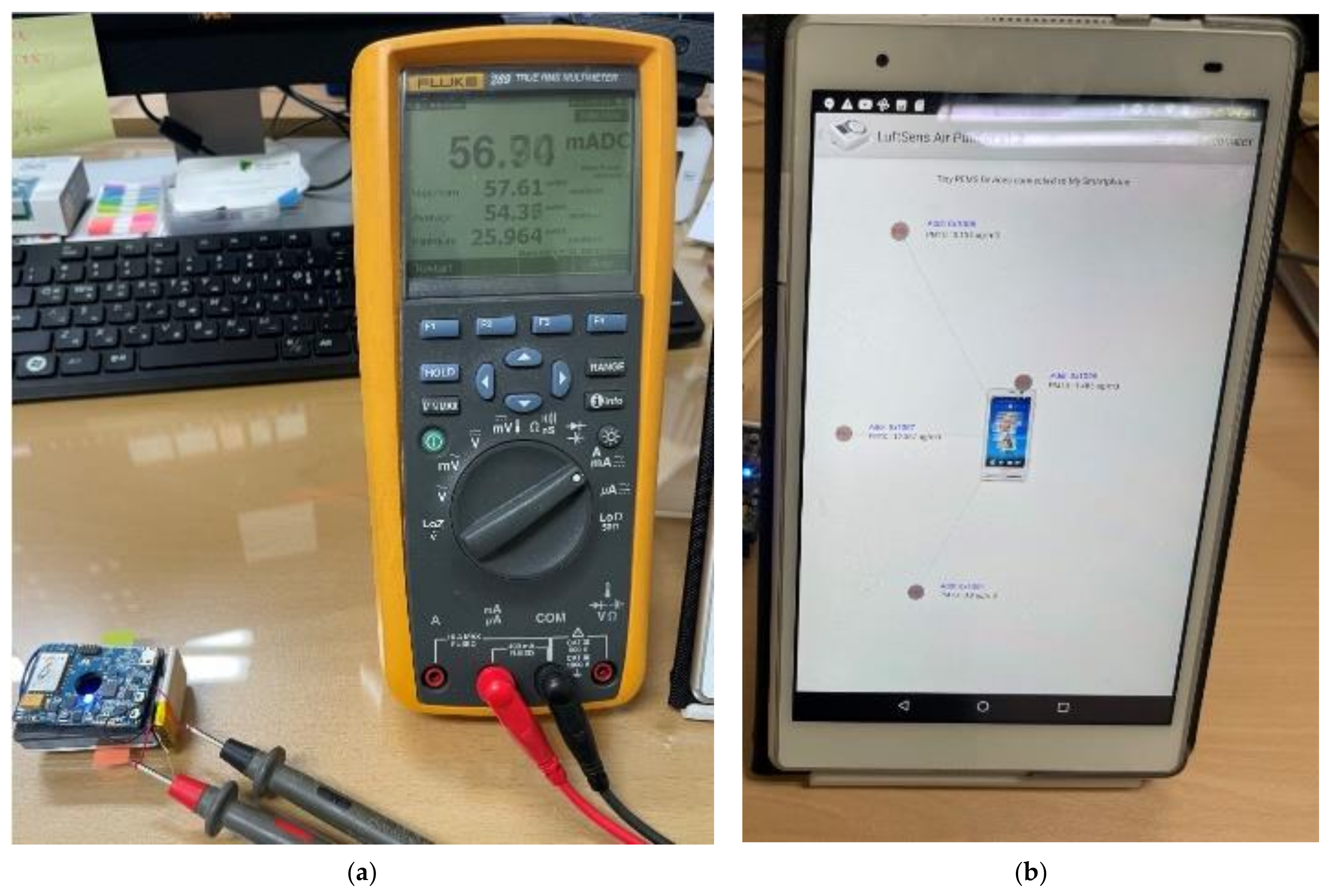
4.2. Smartphone Application
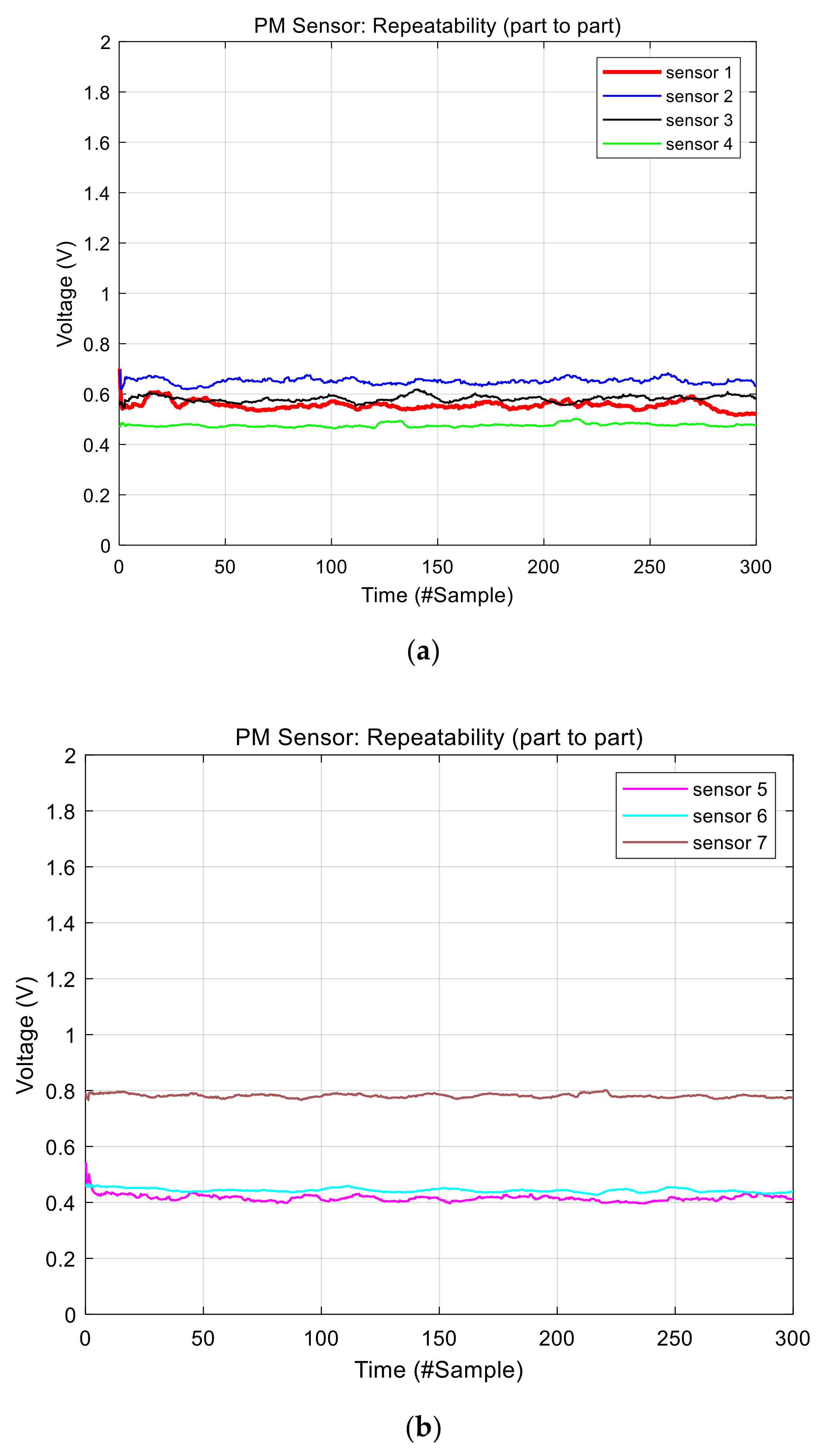
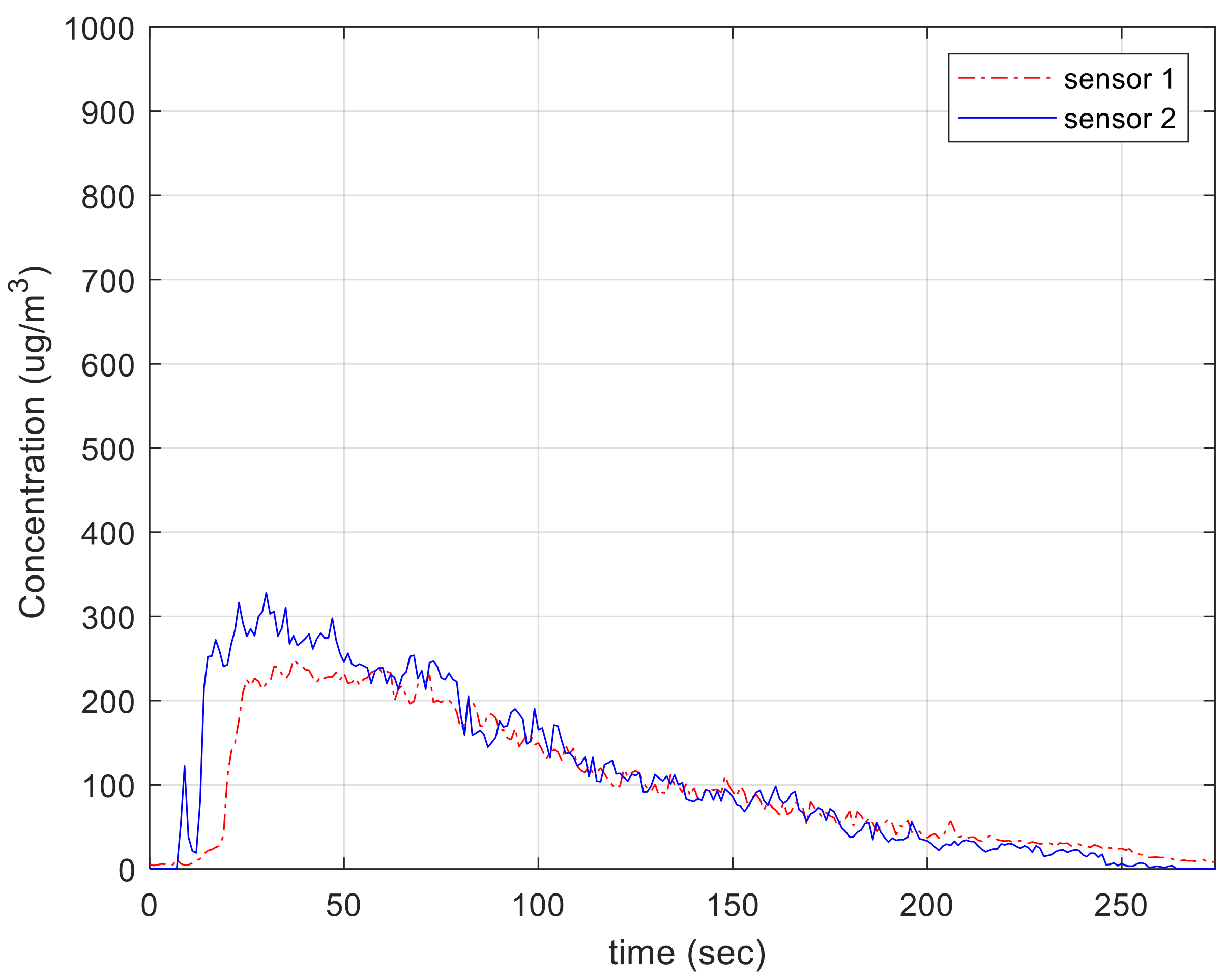
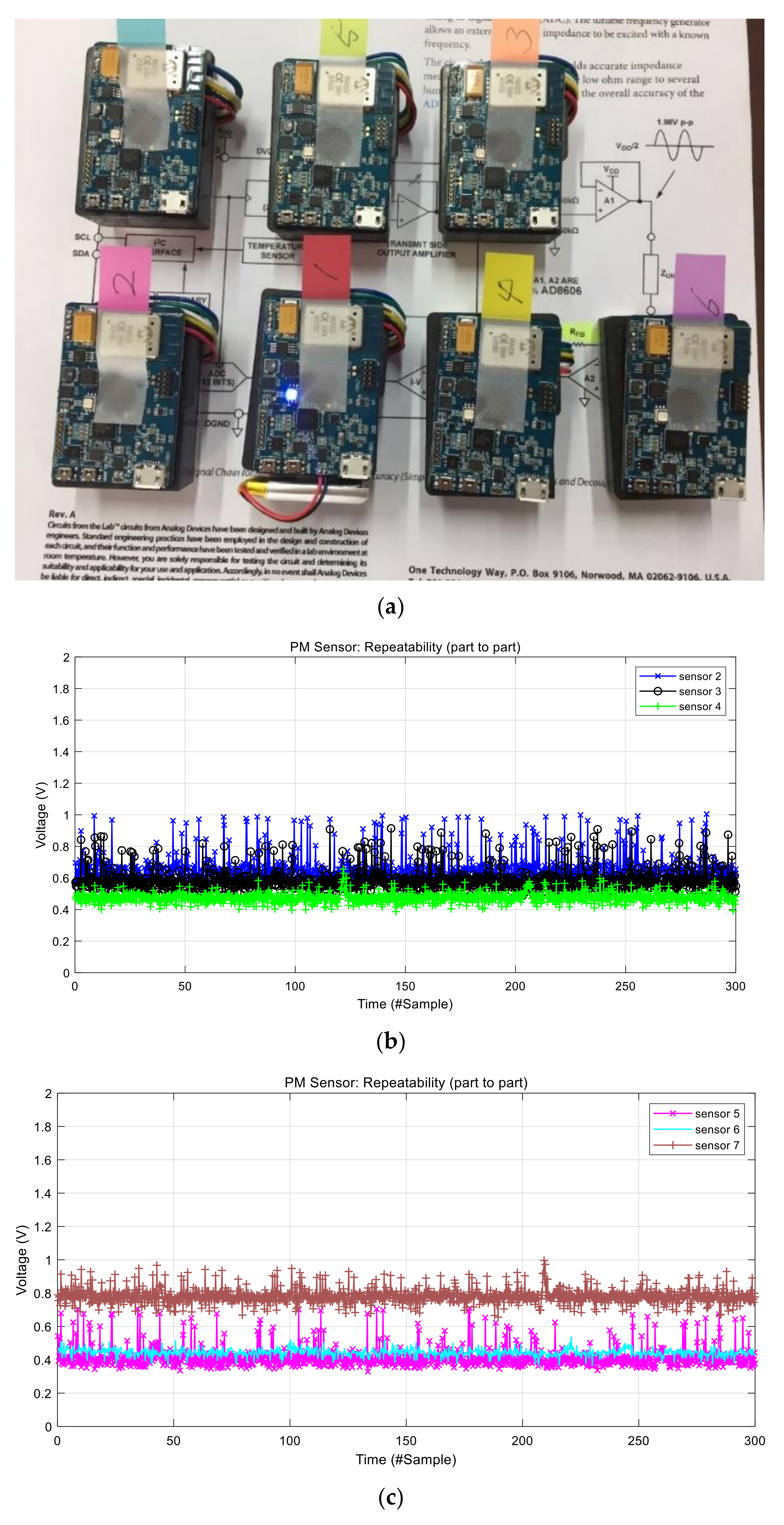
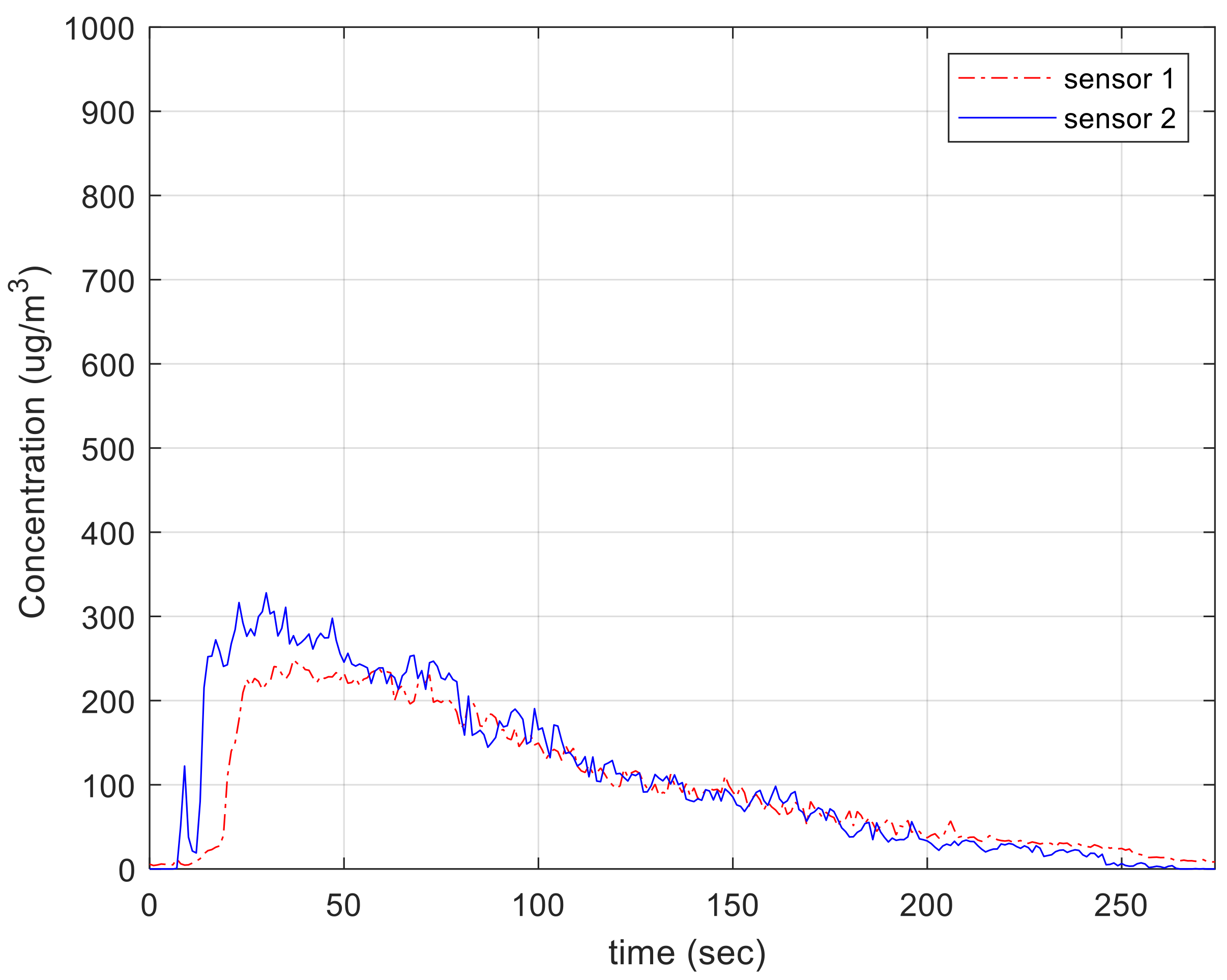
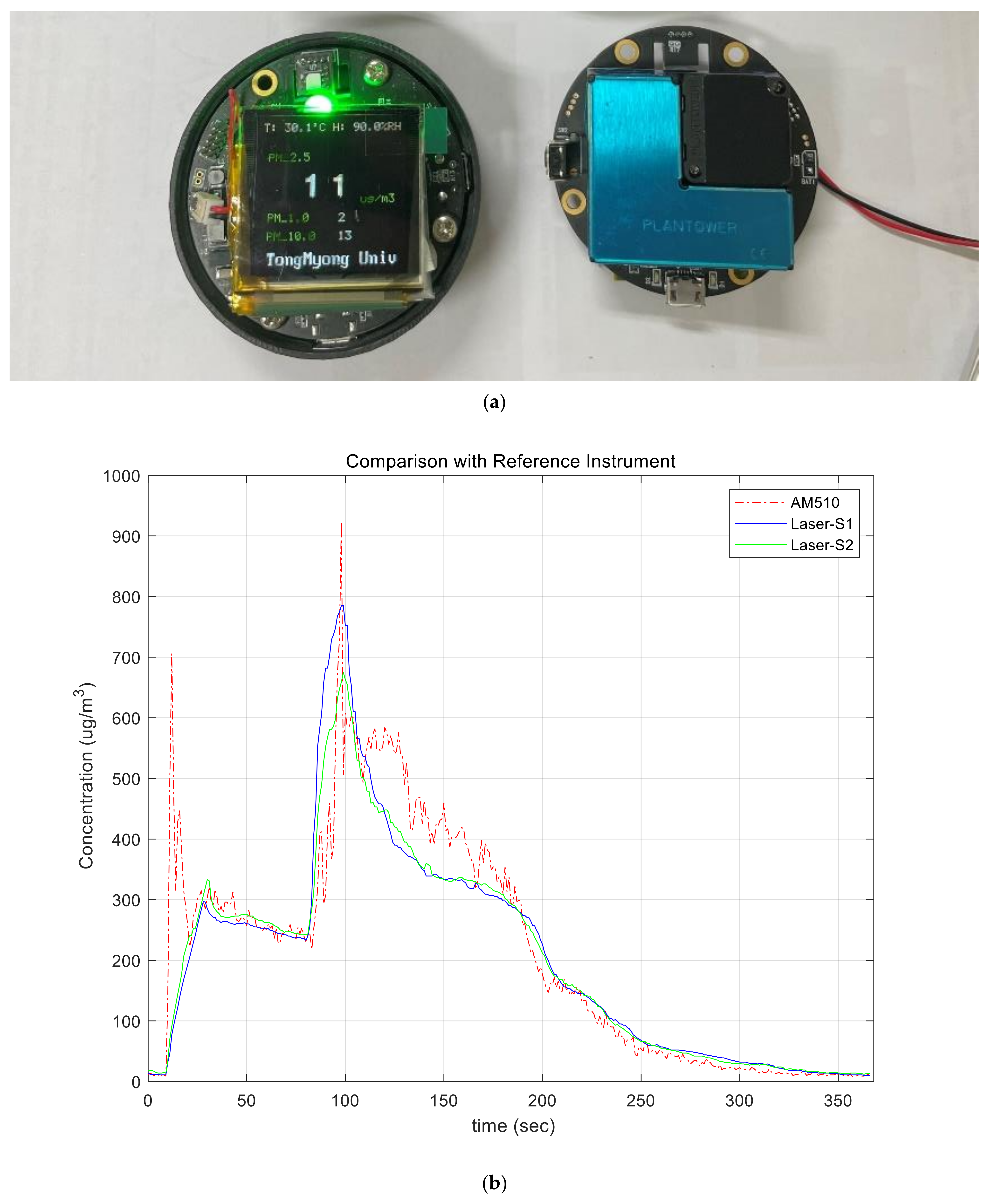
5. Performance Evaluation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- WHO. Burden of Disease from Household Air Pollution for 2012; World Health Organization: Geneva, Switzerland, 2014. [Google Scholar]
- WHO. Public Health, Environmental and Social Determinants of Health (PHE); World Health Organization: Geneva, Switzerland, 2017; Available online: https://www.who.int/news/item/25-03-2014-7-million-premature-deaths-annually-linked-to-air-pollution (accessed on 10 September 2021).
- Anderson, J.O.; Thundiyil, J.G.; Stolbatch, A. Clearing the Air: A Review of the Effects of Particulate Matter Air Pollution on Human Health. J. Med. Toxicol. 2012, 8, 166–175. [Google Scholar] [CrossRef] [Green Version]
- Pope, C.A., III; Burnett, R.T.; Thun, M.J.; Calle, E.E.; Krewski, D.; Ito, K.; Thurston, G.D. Lung cancer, cardiopulmonary mortality, and long-term exposure to fine particulate air pollution. J. Am. Med. Assoc. 2002, 287, 1132–1141. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fine, G.F.; Cavanagh, L.M.; Afonja, A.; Binions, R. Metal Oxide Semi-Conductor Gas Sensors in Environmental Monitoring. Sensors 2010, 10, 5469–5502. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, D.D.; Lee, D.S. Environmental Gas Sensors. IEEE Sens. J. 2001, 1, 214–224. [Google Scholar]
- Cho, H. Personal Environmental Monitoring System and Network Platform. In Proceedings of the International Conference on Sensing Technology 2015, Auckland, New Zealand, 8–10 December 2015. [Google Scholar]
- Alfano, B.; Barretta, L.; Del Giudice, A.; De Vito, S.; Di Francia, G.; Esposito, E.; Formisano, F.; Massera, E.; Miglietta, M.L.; Polichetti, T. A Review of Low-Cost Particulate Matter Sensors from the Developers’ Perspectives. Sensors 2020, 20, 6819. [Google Scholar] [CrossRef] [PubMed]
- Holder, A.L.; Mebust, A.K.; Maghran, L.A.; McGown, M.R.; Stewart, K.E.; Vallano, D.M.; Elleman, R.A.; Baker, K.R. Field Evaluation of Low-Cost Particulate Matter Sensors for Measuring Wildfire Smoke. Sensors 2020, 20, 4796. [Google Scholar] [CrossRef]
- Lee, H.; Kang, J.; Kim, S.; Im, Y.; Yoo, S.; Lee, D. Long-Term Evaluation and Calibration of Low-Cost Particulate Matter (PM) Sensor. Sensors 2020, 20, 3617. [Google Scholar] [CrossRef] [PubMed]
- Brattich, E.; Bracci, A.; Zappi, A.; Morozzi, P.; Di Sabatino, S.; Porcù, F.; Di Nicola, F.; Tositti, L. How to Get the Best from Low-Cost Particulate Matter Sensors: Guidelines and Practical Recommendations. Sensors 2020, 20, 3073. [Google Scholar] [CrossRef]
- Johnston, S.J.; Basford, P.J.; Bulot, F.M.J.; Apetroaie-Cristea, M.; Easton, N.H.C.; Davenport, C.; Foster, G.L.; Loxham, M.; Morris, A.K.R.; Cox, S.J. City Scale Particulate Matter Monitoring Using LoRaWAN Based Air Quality IoT Devices. Sensors 2019, 19, 209. [Google Scholar] [CrossRef] [Green Version]
- Zanni, S.; Lalli, F.; Foschi, E.; Bonoli, A.; Mantecchini, L. Indoor Air Quality Real-Time Monitoring in Airport Terminal Areas: An Opportunity for Sustainable Management of Micro-Climatic Parameters. Sensors 2018, 18, 3798. [Google Scholar] [CrossRef] [Green Version]
- Di Antonio, A.; Popoola, O.A.M.; Ouyang, B.; Saffell, J.; Jones, R.L. Developing a Relative Humidity Correction for Low-Cost Sensors Measuring Ambient Particulate Matter. Sensors 2018, 18, 2790. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reece, S.; Williams, R.; Colón, M.; Southgate, D.; Huertas, E.; O’Shea, M.; Iglesias, A.; Sheridan, P. Spatial-Temporal Analysis of PM2.5 and NO2 Concentrations Collected Using Low-Cost Sensors in Peñuelas, Puerto Rico. Sensors 2018, 18, 4314. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, S.; Zhang, S.; Sardar, S.; Chen, S.; Dzhema, I.; Huang, S.M.; Quiros, D.; Sun, H.; Laroo, C.; Ayala, A.; et al. Evaluation of Gravimetric Method to Measure Light-Duty Vehicle Particulate Matter Emissions at Levels below One Milligram Per Mile (1 mg/mile); (No. 2014-01-1571); Technical Paper; SAE: Warrendale, PA, USA, 2014. [Google Scholar]
- Shin, S.E.; Jung, C.H.; Kim, Y.P. Analysis of the measurement difference for the PM10 concentrations between Beta-ray absorption and gravimetric methods at Gosan. Aerosol Air Qual. Res. 2011, 11, 846–853. [Google Scholar] [CrossRef] [Green Version]
- Patashnick, H.; Rupprecht, E.G. Continuous PM-10 measurements using the tapered element oscillating microbalance. J. Air Waste Manag. Assoc. 1991, 41, 1079–1083. [Google Scholar] [CrossRef]
- WHO. WHO Guidelines for Indoor Air Quality: Selected Pollutants; WHO: Geneva, Switzerland, 2010. [Google Scholar]
- Johnson, K.K.; Bergin, M.H.; Russell, A.G.; Hagler, G.S. Using Low Cost Sensors to Measure Ambient Particulate Matter Concentrations and On-Road Emissions Factors. Atmos. Meas. Tech. Discuss. 2016, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Sousan, S.; Regmi, S.; Park, Y.M. Laboratory Evaluation of Low-Cost Optical Parcle Counters for Environmental and Occupational Exposures. Sensors 2021, 21, 4146. [Google Scholar] [CrossRef]
- Venkatraman Jagatha, J.; Klausnitzer, A.; Chacón-Mateos, M.; Laquai, B.; Nieuwkoop, E.; van der Mark, P.; Vogt, U.; Schneider, C. Calibration Method for Particulate Matter Low-Cost Sensors Used in Ambient Air Quality Monitoring and Research. Sensors 2021, 21, 3960. [Google Scholar] [CrossRef]
- Zaidan, M.A.; Motlagh, N.H.; Fung, P.L.; Lu, D.; Timonen, H.; Kuula, J.; Niemi, J.V.; Tarkoma, S.; Petäjä, T.; Kulmala, M.; et al. Intelligent Calibration and Virtual Sensing for Integrated Low-Cost Air Quality Sensors. IEEE Sens. J. 2020, 20, 13638–13652. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Zaidan, M.A.; Fung, P.L.; Lagerspetz, E.; Aula, K.; Varjonen, S.; Siekkinen, M.; Rebeiro-Hargrave, A.; Petäjä, T.; Matsumi, Y.; et al. Transit pollution exposure monitoring using low-cost wearable sensors. Transp. Res. Part D Transp. Environ. 2021, 98, 102981. [Google Scholar] [CrossRef]
- Gressent, A.; Malherbe, L.; Colette, A.; Rollin, H.; Scimia, R. Data fusion for air quality mapping using low-cost sensor observations: Feasibility and added-value. Environ. Int. 2020, 143, 105965. [Google Scholar] [CrossRef]
- Miskell, G.; Salmond, J.A.; Williams, D.E. Solution to the problem of calibration of low-cost air quality measurement sensors in networks. ACS Sens. 2018, 3, 832–843. [Google Scholar] [CrossRef] [PubMed]
- Clements, A.L.; Griswold, W.G.; Rs, A.; Johnston, J.E.; Herting, M.M.; Thorson, J.; Collier-Oxandale, A.; Hannigan, M. Low-Cost Air Quality Monitoring Tools: From Research to Practice (A Workshop Summary). Sensors 2017, 17, 2478. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- NXP Semiconductor. MKL17Z Datasheet NXP Semiconductor 2016. Available online: https://www.nxp.com (accessed on 9 June 2021).
- Sharp. Application note of Sharp dust sensor GP2Y1010AU0F. Available online: https://global.sharp/products/device/lineup/data/pdf/datasheet/gp2y1010au_appl_e.pdf (accessed on 9 June 2021).
- Silicon Labs. Si7020-A20 Datasheet. Available online: https://www.silabs.com/documents/public/data-sheets/Si7020-A20.pdf (accessed on 9 June 2021).
- Microchips. RN4020 Bluetooth Low Energy Module Datasheet. Available online: https://www.microchip.com/wwwproducts/en/RN4020 (accessed on 9 June 2021).
- Budde, M.; Rasri, R.E.; Riedel, T.; Beigl, M. Enabling Low-Cost Particulate Matter Measurement for Participatory Sensing Scenarios. In Proceedings of the 12th International Conference on Mobile and Ubiquitous Multimedia, Luleå, Sweden, 2–5 December 2013; pp. 1–10. [Google Scholar]
- Goiffon, V.; Virmontois, C.; Magnan, P.; Cervantes, P.; Place, S.; Gaillardin, M.; Girard, S.; Paillet, P.; Estribeau, M.; Martin-Gonthier, P.; et al. Identification of radiation induced dark current sources in pinned photodiode CMOS image sensors. IEEE Trans. Nucl. Sci. 2012, 59, 918–926. [Google Scholar] [CrossRef] [Green Version]
- Simone, G.; Dyson, M.J.; Weijtens, C.H.; Meskers, S.C.; Coehoorn, R.; Janssen, R.A.; Gelinck, G.H. On the origin of dark current in organic photodiodes. Adv. Opt. Mater. 2020, 8, 1901568. [Google Scholar] [CrossRef] [Green Version]
- TSI. Sidepak Personal Aerosol Monitor AM510 Manual. Available online: https://tsi.com/discontinued-products/sidepak-personal-aerosol-monitor-am510 (accessed on 22 June 2021).
- Plantower. PMSA003 Datasheet. Available online: http://www.plantower.com/content/?125.html (accessed on 2 September 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # Part | Name | Description |
|---|---|---|
| 1 | MCU | NXP MKL17Z256VMP4 (Cortex-M0+) |
| 2 | PM sensor | Sharp GP2Y1010 |
| 3 | Battery Gauge | Maxim MAX17058 |
| 4 | Battery charger | TI BQ24210 |
| 5 | RS-232 | Silicon Labs CP 201x USB-to-RS232 bridge |
| 6 | Step-up DC-DC converter | Maxim MAX8815A |
| 7 | Bluetooth LE | Microchips RN4020 |
| 8 | OP AMP | Analog Device ADA4505 |
| 9 | LDO | STM STLQ015XG30R |
| 10 | Humidity/Temperature Sensor | Silicon Labs SI7020 |
| Original PM Sensor with No Calibration | |||||||
|---|---|---|---|---|---|---|---|
| PM | #1 | #2 | #3 | #4 | #5 | #6 | #7 |
| MIN | 0 | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 | 0.006 |
| MAX | 101.022 | 77.553 | 72.281 | 45.750 | 64.628 | 29.253 | 57.830 |
| STD | 12.913 | 13.838 | 11.170 | 5.213 | 10.088 | 3.875 | 7.355 |
| AVG | 17.844 | 17.290 | 15.812 | 15.191 | 14.578 | 13.230 | 21.283 |
| Our Method with Calibration | |||||||
|---|---|---|---|---|---|---|---|
| PM | #1 | #2 | #3 | #4 | #5 | #6 | #7 |
| MIN | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| MAX | 0.461 | 0.291 | 0.345 | 0.377 | 1.641 | 0.454 | 0.394 |
| STD | 0.101 | 0.082 | 0.068 | 0.093 | 0.378 | 0.110 | 0.055 |
| AVG | 0.093 | 0.046 | 0.032 | 0.045 | 0.309 | 0.136 | 0.021 |
| PM Sensor | Bluetooth | Others (MCU, H/T, Etc.) | Total | |
|---|---|---|---|---|
| Consumed current (mA) | 33.3 mA @3 V | 20.7 mA @3 V | 3 mA @3 V | 57 mA |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, H.; Baek, Y. Practical Particulate Matter Sensing and Accurate Calibration System Using Low-Cost Commercial Sensors. Sensors 2021, 21, 6162. https://doi.org/10.3390/s21186162
Cho H, Baek Y. Practical Particulate Matter Sensing and Accurate Calibration System Using Low-Cost Commercial Sensors. Sensors. 2021; 21(18):6162. https://doi.org/10.3390/s21186162
Chicago/Turabian StyleCho, Hyuntae, and Yunju Baek. 2021. "Practical Particulate Matter Sensing and Accurate Calibration System Using Low-Cost Commercial Sensors" Sensors 21, no. 18: 6162. https://doi.org/10.3390/s21186162
APA StyleCho, H., & Baek, Y. (2021). Practical Particulate Matter Sensing and Accurate Calibration System Using Low-Cost Commercial Sensors. Sensors, 21(18), 6162. https://doi.org/10.3390/s21186162