
On the Importance of Characterizing Virtual PMUs for Hardware-in-the-Loop and Digital Twin Applications





Abstract
:1. Introduction
2. Characterization of the Calibrator
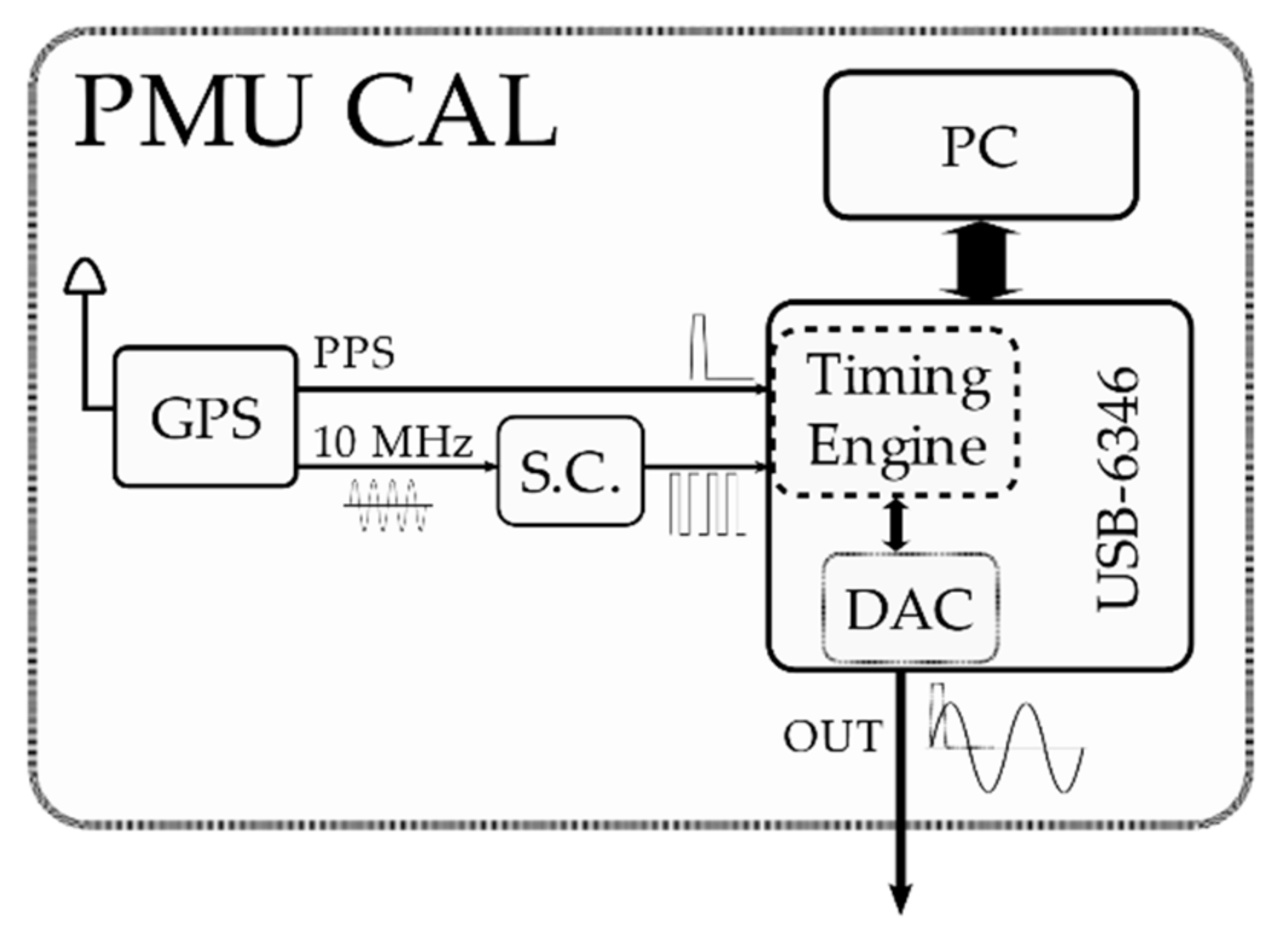
2.1. The Calibrator Hardware Architecture
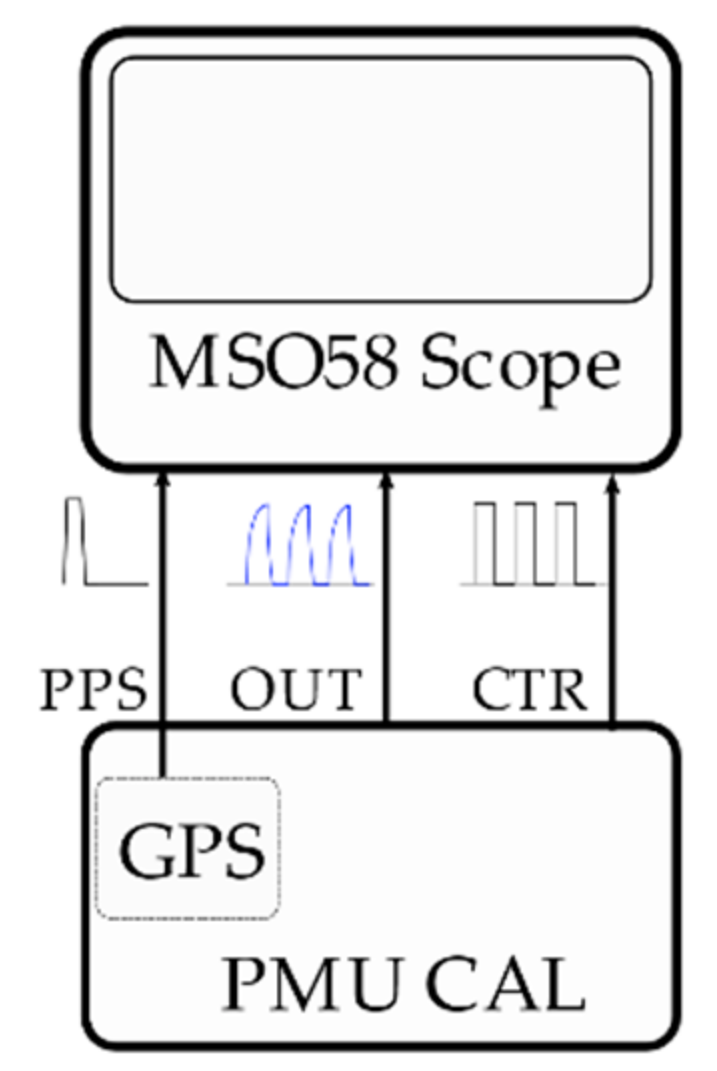
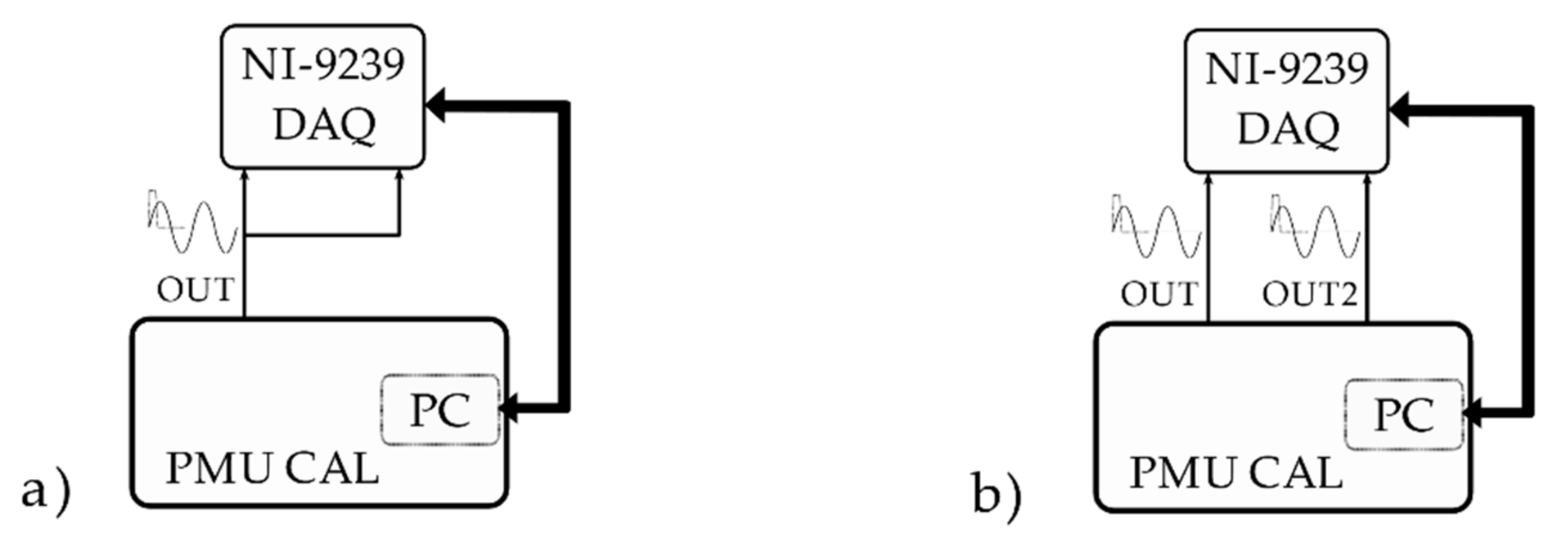
2.2. Characterization and Testing of the Calibrator
2.2.1. Signal Magnitude Test Case
- -
- A voltage signal varying from 80 to 120% of the rated value;
- -
- A current signal varying from 10 to 200% of the rated value.
2.2.2. Harmonic Distortion Test Case
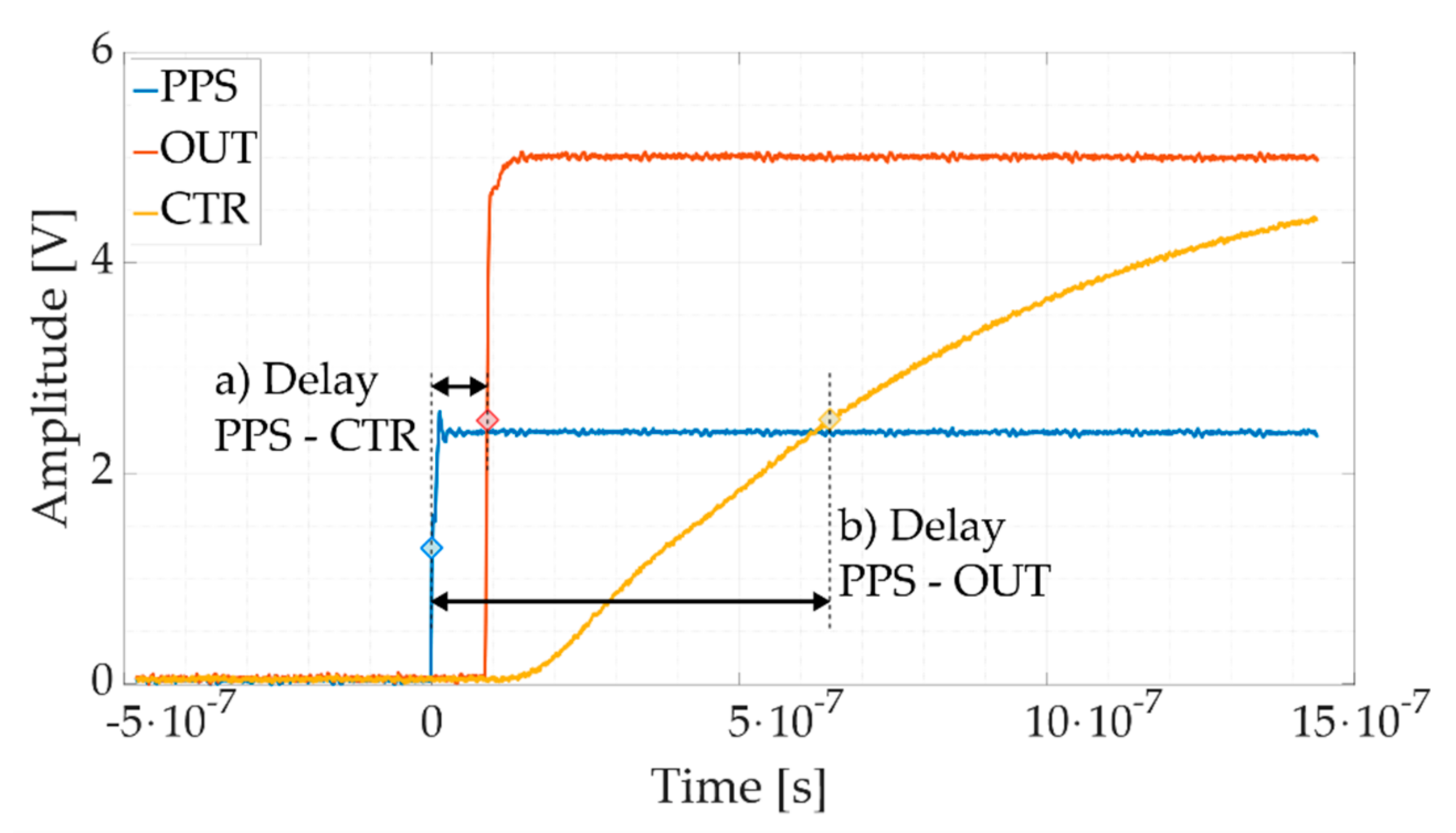
2.2.3. Synchronization Test Case
2.2.4. Frequency and ROCOF Test
2.2.5. Phase Displacement Test
2.3. Results of the Characterization Tests
2.3.1. Signal Magnitude Test Results
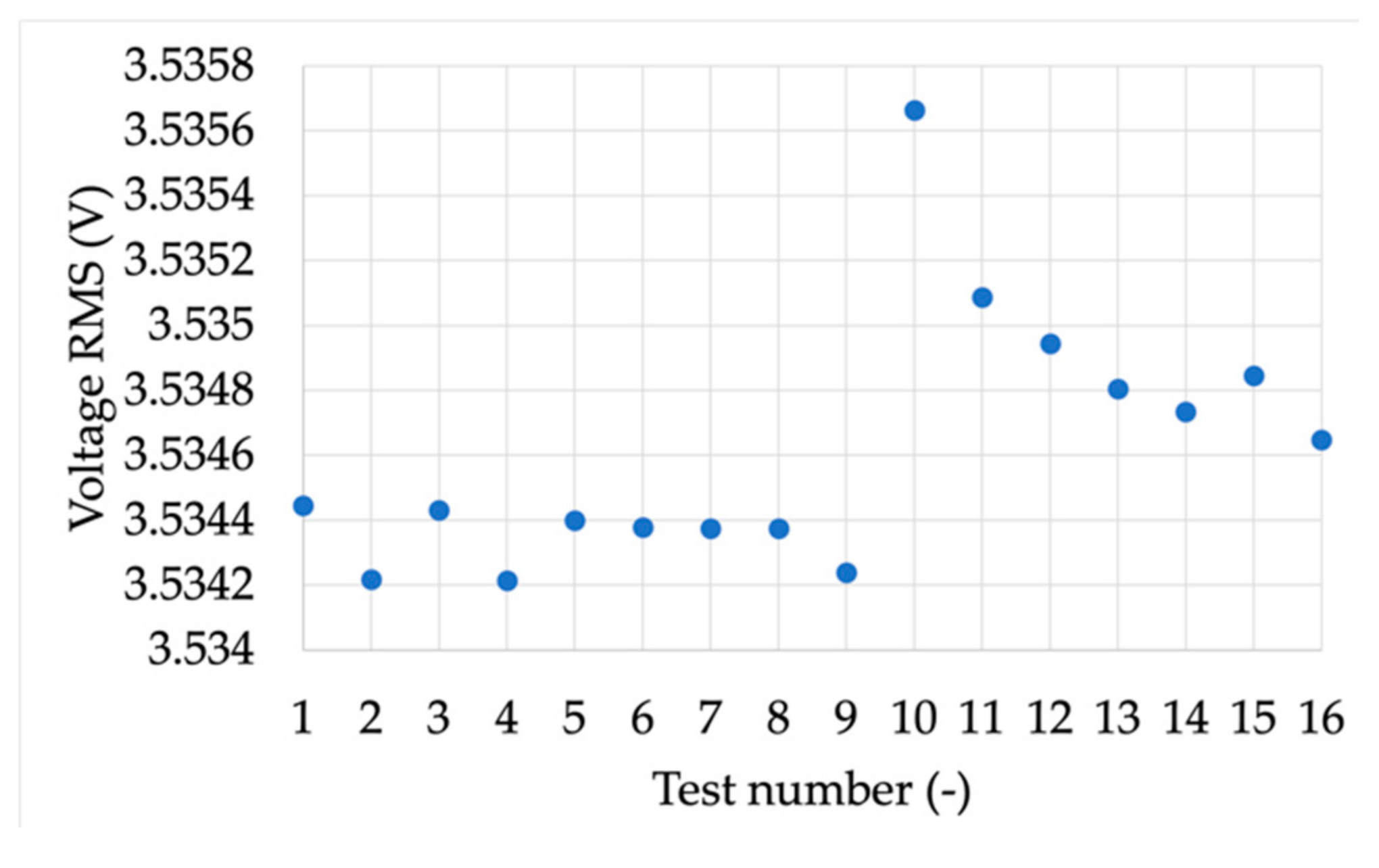
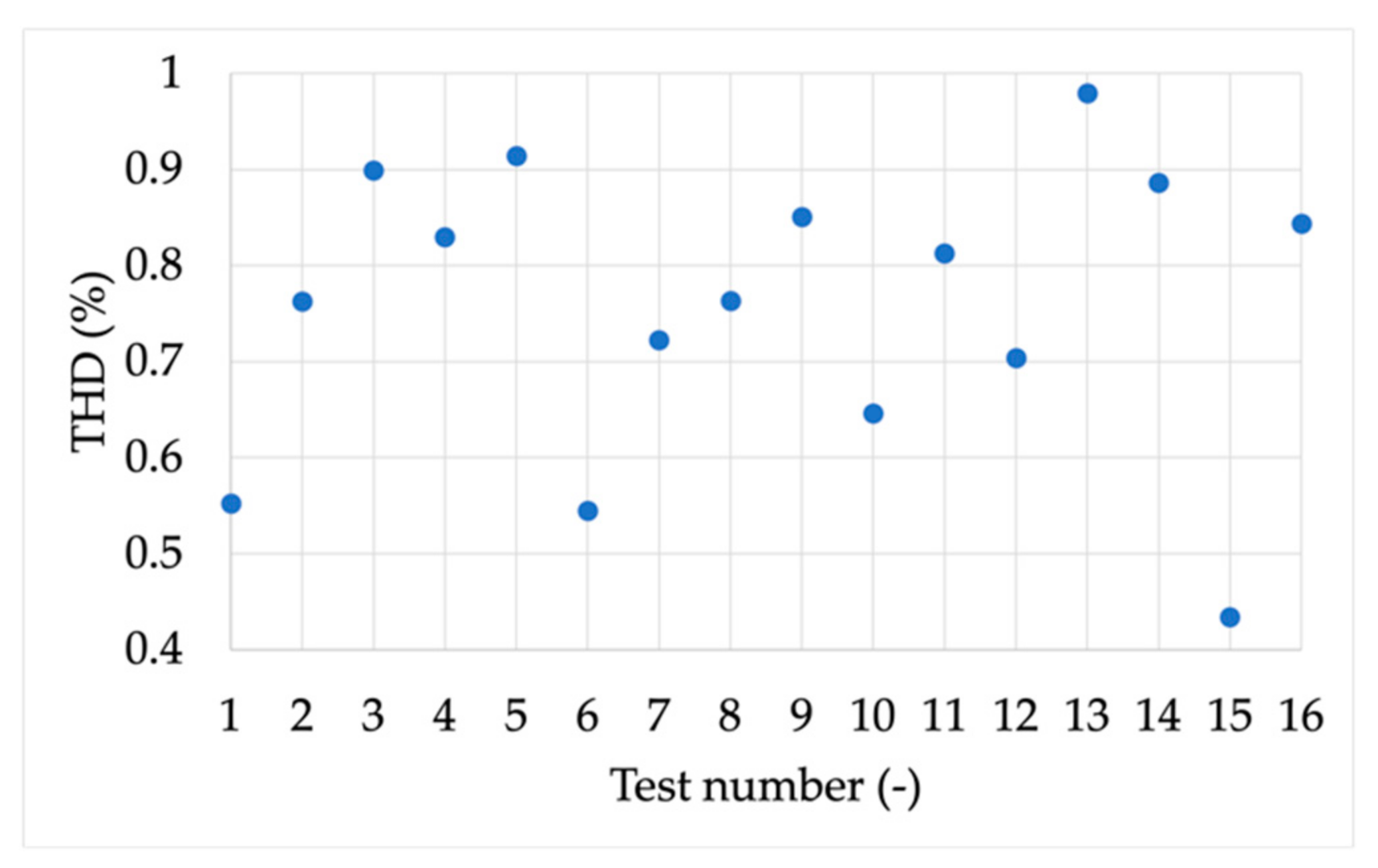
2.3.2. Harmonic Distortion Test Results
2.3.3. Synchronization Test Results
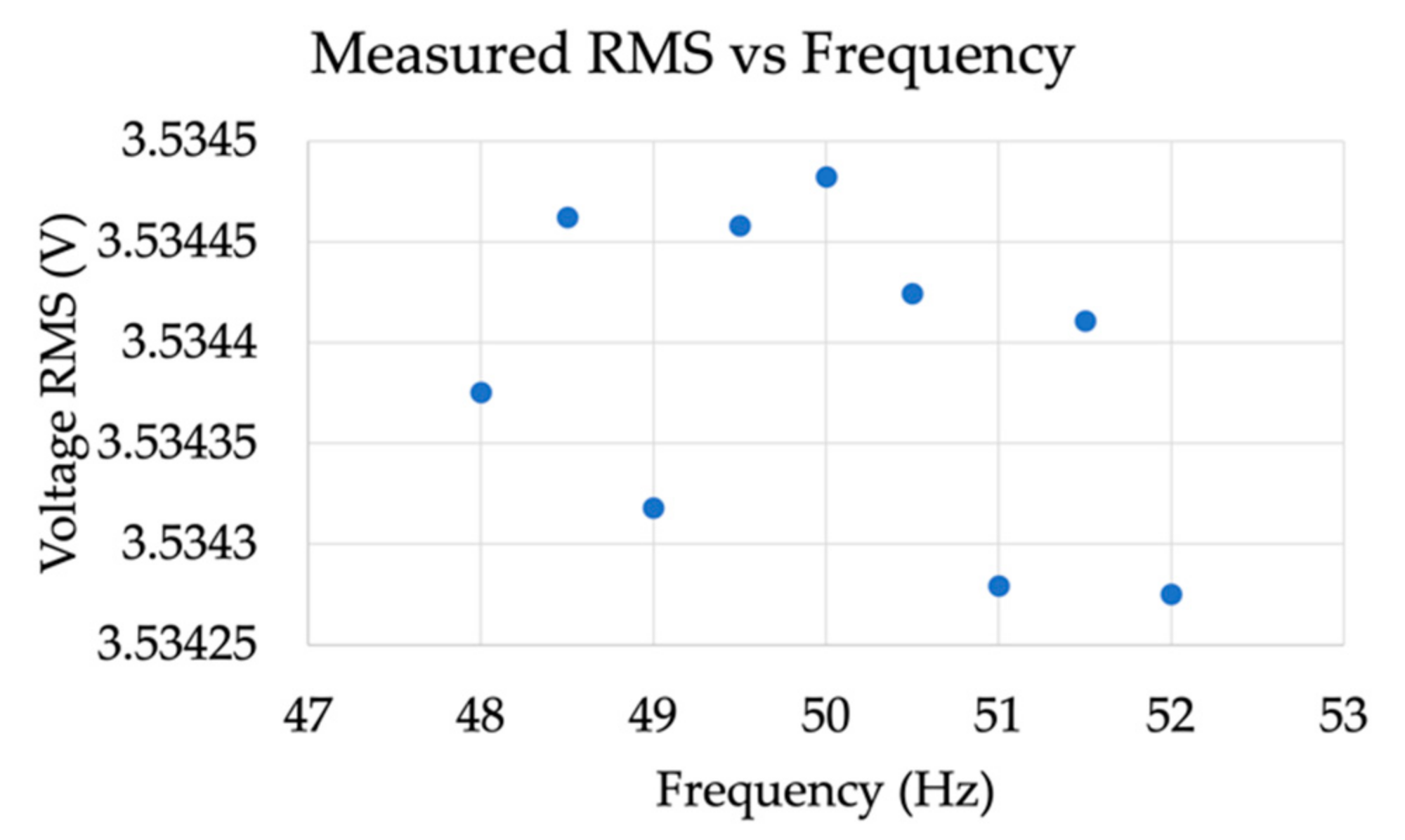
2.3.4. Frequency and ROCOF Test Results
2.3.5. Phase Displacement Test Results
2.3.6. Characterization Conclusions
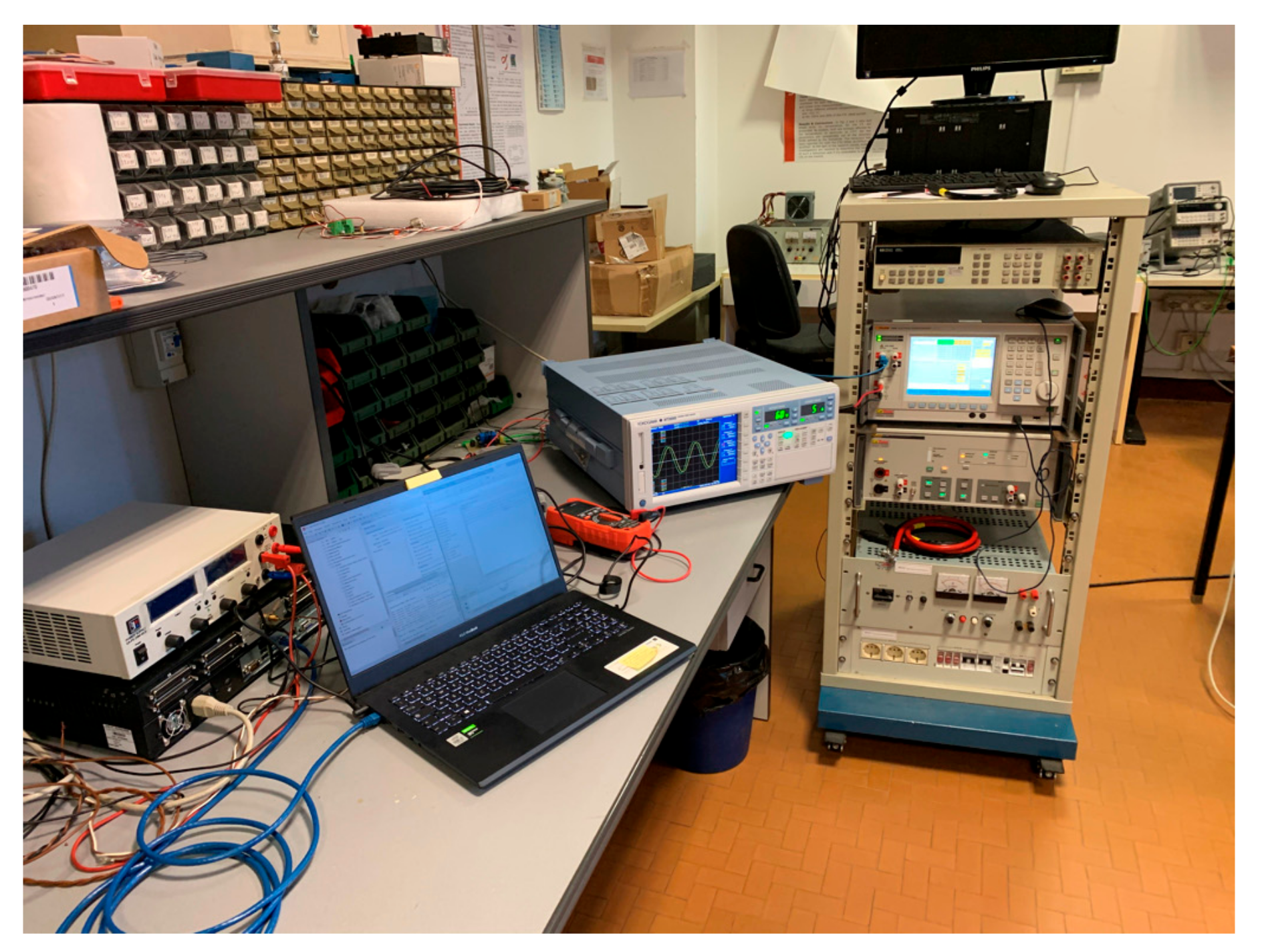
3. RTS Environment
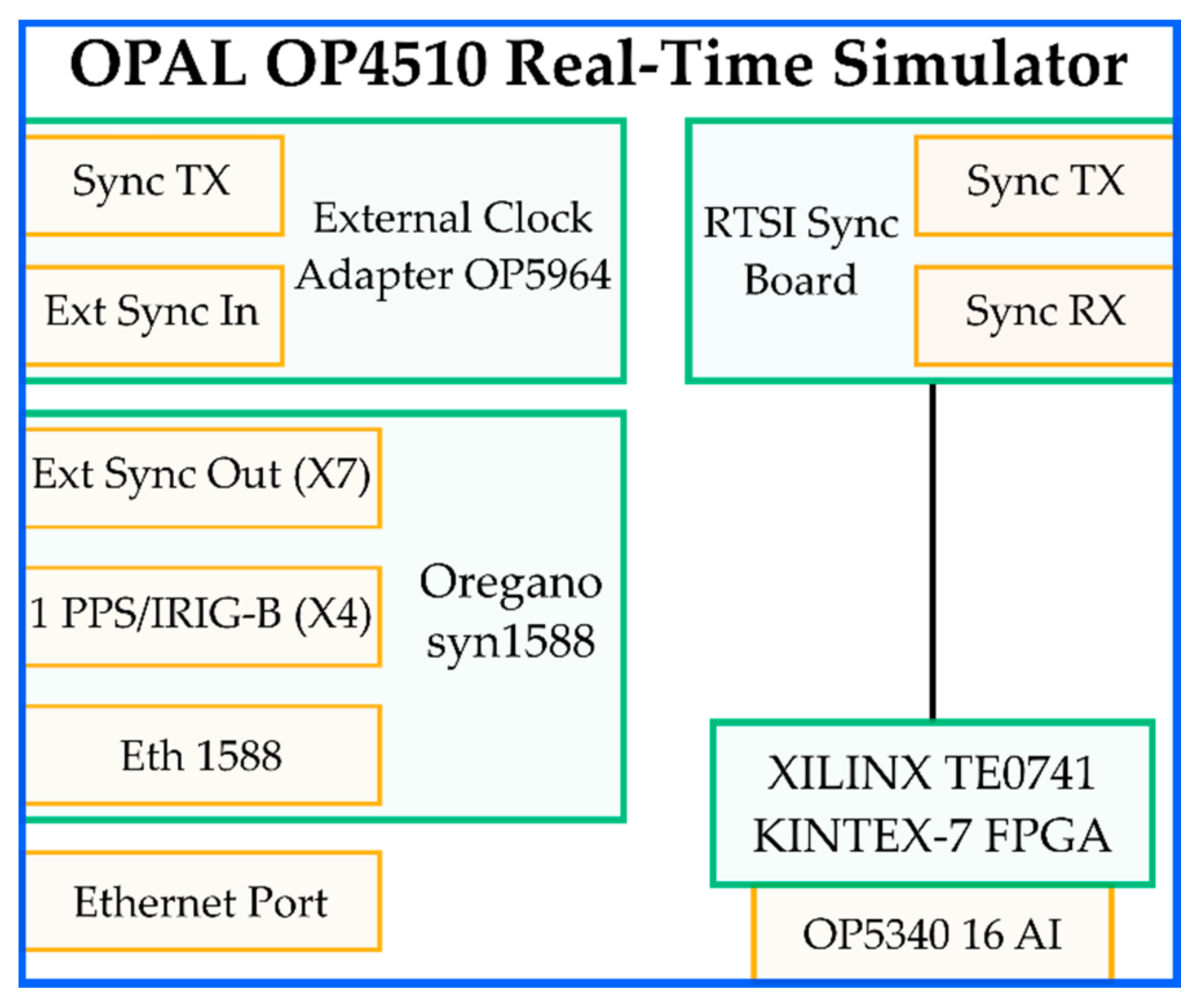
3.1. Description of the RTS
- Oregano syn1588 PCIe NIC. It is a PCI Express Ethernet network interface that provides highly accurate clock synchronization via the IEEE 1588 Standard (accuracy of its oscillator higher than 0.05 ppm). The Oregano card can be synchronized with either a PPS signal or an IRIG-B signal from a GPS source (3.3 V signal).
- External Clock Adapter OP5964. It is used to receive and transmit the synchronization signal from the outside to the interfaces.
- RTSI (Real-Time System Interface) Synchronization Board. This board directly communicated with the FPGA, as can be seen from Figure 7 (black line).
- XILINX TE0741 KINTEX-7 FPGA. It accepts either OPAL-RT boards or RS422 signals. The types of synchronization allowed are LVDS and fiber optic.
- Analog input (AI) card OP5340. It features 16 synchronous differential analog input channels with a maximum voltage range of ±20 V, sampled at 400 kSa/s. The analog to digital converter (ADC) has a 16-bit resolution, and the minimum acquisition time is 2.5 µs per channel. The declared maximum noise of the analog card is 20 mV peak-to-peak. The ADC already includes anti-aliasing filters to remove frequencies higher than 600 kHz.
- Ethernet port. It is used to interface a laptop to the OP4510 RTS.
3.2. Description of the PMU
4. Tests and Results
4.1. PMU Testing
4.1.1. Amplitude Tests
4.1.2. Frequency Tests
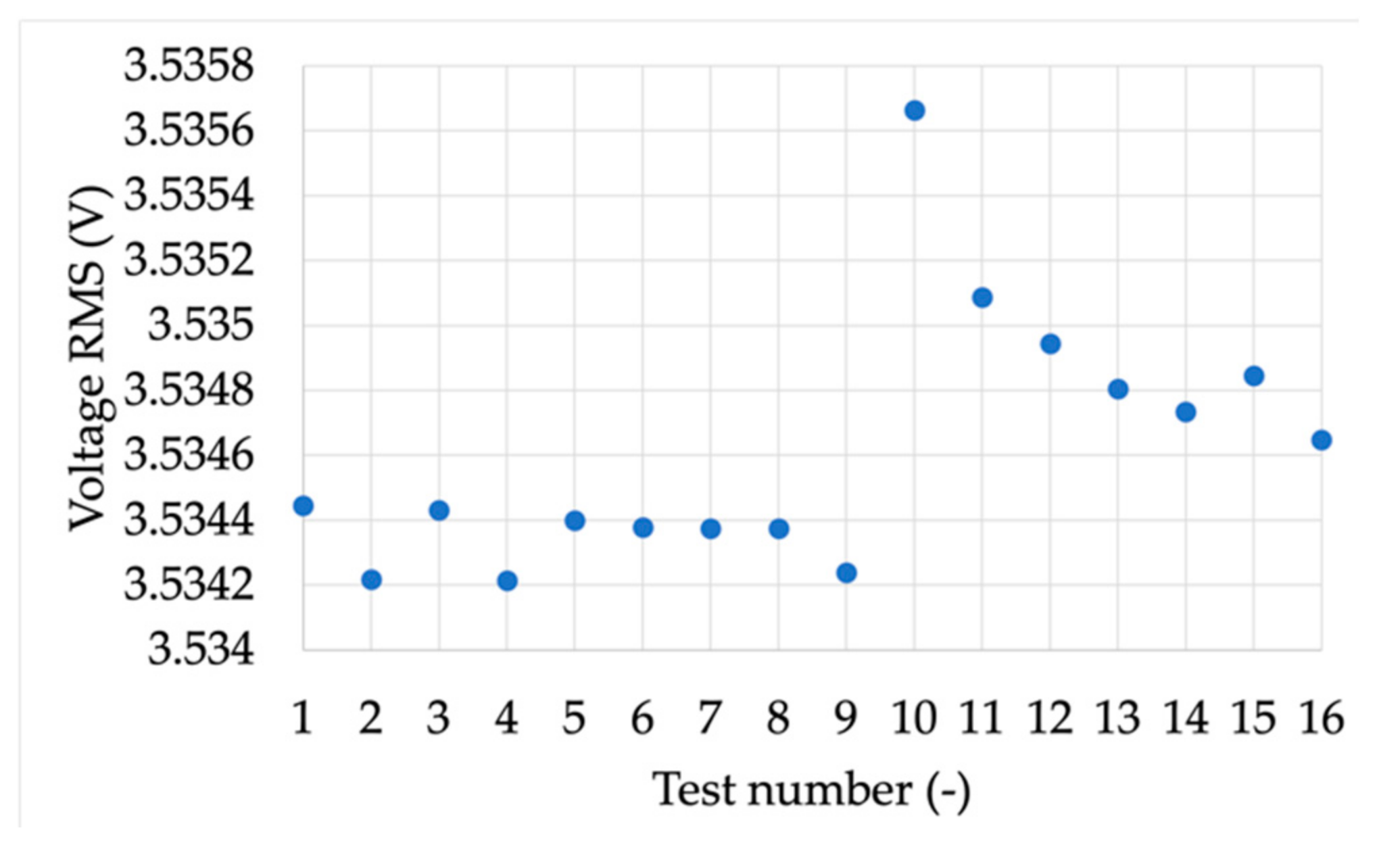
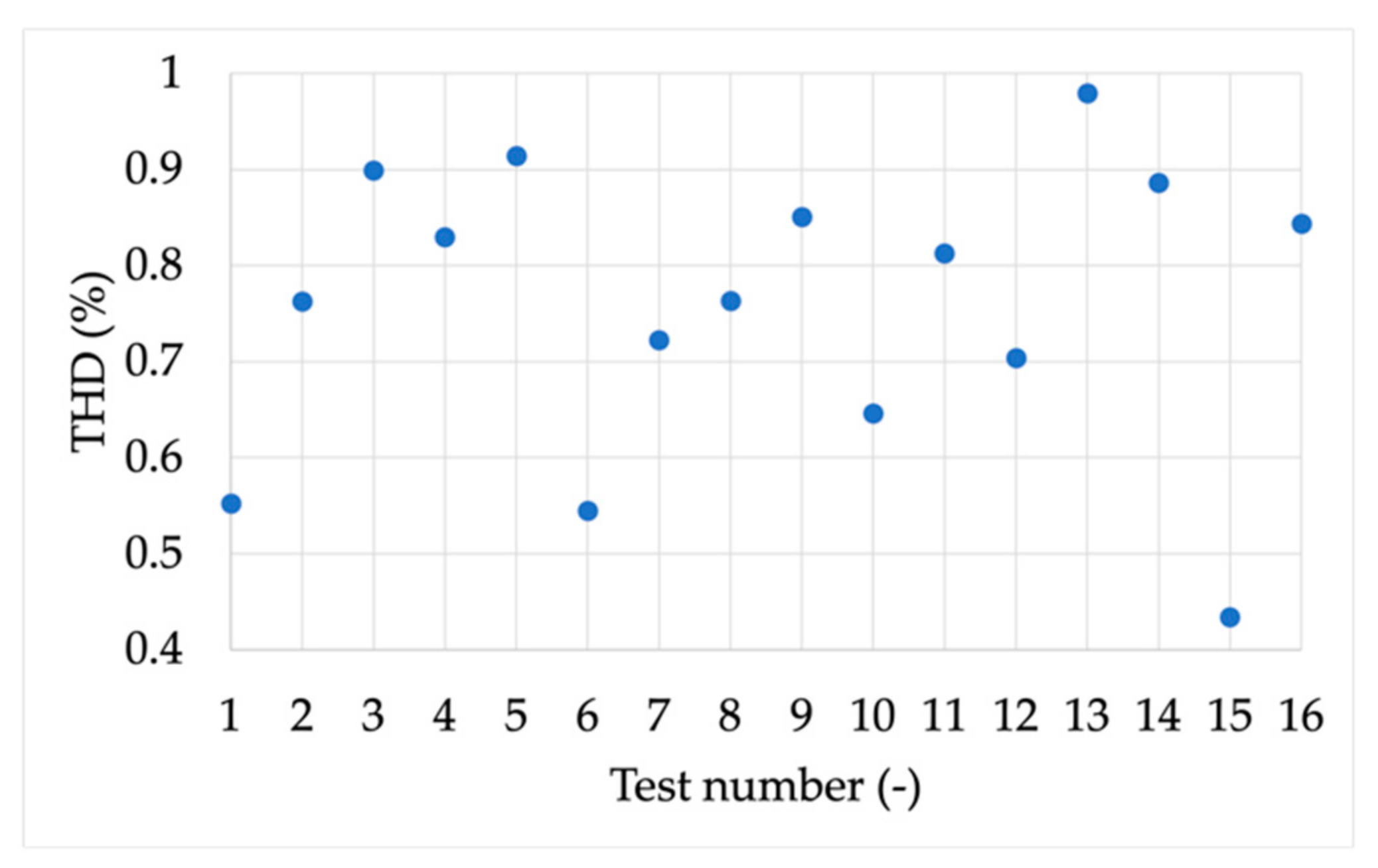
4.1.3. Harmonic Tests
4.1.4. Phase Tests
4.2. Tests Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hammer, B.; Fuhr, C.; Hanson, J.; Konigorski, U. Differences of power flows in transmission and distribution networks and implications on inverter droop control. In Proceedings of the ICCEP 2019—7th International Conference on Clean Electrical Power: Renewable Energy Resources Impact, Otranto, Italy, 2–4 July 2019; pp. 46–54. [Google Scholar]
- Shiguang, L.; Ting, Y.; Tianjiao, P.; Jie, M.; Fan, S. Coordinated optimization control method of transmission and distribution network. In Proceedings of the Asia-Pacific Power and Energy Engineering Conference, APPEEC, Xi’an, China, 12 December 2016; pp. 2215–2219. [Google Scholar]
- Voropai, N.I.; Krol, A.M.; Thanh, B.D. Power system restoration plans for transmission and distribution networks. IFAC Proc. Vol. 2012, 8 Pt 1, 411–415. [Google Scholar] [CrossRef]
- Mingotti, A.; Ghaderi, A.; Mazzanti, G.; Peretto, L.; Tinarelli, R.; Valtorta, G.; Danesi, S. Low-cost monitoring unit for MV cable joints diagnostics. In Proceedings of the 9th IEEE International Workshop on Applied Measurements for Power Systems, AMPS 2018, Bologna, Italy, 26–28 September 2018. [Google Scholar]
- Peretto, L.; Tinarelli, R.; Ghaderi, A.; Mingotti, A.; Mazzanti, G.; Valtorta, G.; Danesi, S. Monitoring cable current and laying environment parameters for assessing the aging rate of MV cable joint insulation. In Proceedings of the Annual Report-Conference on Electrical Insulation and Dielectric Phenomena, CEIDP, Cancun, Mexico, 21–24 October 2018; pp. 390–393. [Google Scholar]
- Li, Z.; Li, Z.; Li, Z.; Li, Y. Application of GA-LSTM model in cable joint temperature prediction. In Proceedings of the 2020 7th International Forum on Electrical Engineering and Automation, IFEEA, Hefei, China, 25–27 September 2020; pp. 71–75. [Google Scholar]
- Zhan, Q.; Tang, L.; Ou, X.; Liu, Y.; Tang, K.; Chen, R.; Wang, J. 110kV cable joint temperature computation based on radial basis function neural networks. In Proceedings of the ICHVE 2018 IEEE International Conference on High Voltage Engineering and Application, Athens, Greece, 10–13 September 2018. [Google Scholar]
- Springer, P.; Callaway, D. Effect of conductor high-temperature on porcelain suspension insulators. In Proceedings of the IEEE PES General Meeting, PES, Minneapolis, MN, USA, 25–29 July 2010. [Google Scholar]
- Yuan, Z.; Tu, Y.; Wang, C. Temperature rise prediction on silicone rubber housing of composite insulator in high humidity environment. In Proceedings of the 7th IEEE International Conference on High Voltage Engineering and Application, ICHVE, Beijing, China, 6–10 September 2020. [Google Scholar]
- Zhang, D.; Meng, F. Research on the interrelation between temperature distribution and dry band on wet contaminated insulators. Energies 2019, 12, 4289. [Google Scholar] [CrossRef] [Green Version]
- IEC 61869–1:2010, Instrument Transformers-Part 1: General requirements; International Standardization Organization: Geneva, Switzerland, 2010.
- IEC 61869–6:2016. Instrument Transformers-Part 6: Additional General Requirements for Low-Power Instrument Transformers; International Standardization Organization: Geneva, Switzerland, 2016. [Google Scholar]
- Dadić, M.; Župan, T.; Kolar, G. FIR modeling of voltage instrument transformers from frequency response data. In Proceedings of the 2018 1st International Colloquium on Smart Grid Metrology, SmaGriMet, Split, Croatia, 24–27 April 2018. [Google Scholar]
- Nikolić, B.; Khan, S. Modelling and optimisation of design of non-conventional instrument transformers. J. Phys. Conf. Ser. 2019, 1379, 012057. [Google Scholar] [CrossRef]
- Vaytelenok, L. Operation of relay protection digital elements at saturation of current transformers: Modeling and analysis. In Proceedings of the 2019 International Conference on Industrial Engineering, Applications and Manufacturing, ICIEAM, Sochi, Russia, 25–29 March 2019. [Google Scholar]
- Mingotti, A.; Peretto, L.; Tinarelli, R. A simple modelling procedure of rogowski coil for power systems applications. In Proceedings of the AMPS-2019 10th IEEE International Workshop on Applied Measurements for Power Systems, Aachen, Germany, 25–27 September 2019. [Google Scholar]
- Brandolini, A.; Faifer, M.; Ottoboni, R. A simple method for the calibration of traditional and electronic measurement current and voltage transformers. IEEE Trans. Instrum. Meas. 2009, 58, 1345–1353. [Google Scholar] [CrossRef]
- Bui, A.T.; Sixdenier, F.; Morel, L.; Burais, N. Characterization and modeling of a current transformer working under thermal stress. IEEE Trans. Magn. 2012, 48, 2600–2604. [Google Scholar] [CrossRef]
- Crotti, G.; Giordano, D.; Letizia, P.S.; Delle Femine, A.; Luiso, M. A simplified procedure for the accurate frequency response identification of voltage transformers. In Proceedings of the 24th IMEKO TC4 International Symposium and 22nd International Workshop on ADC and DAC Modelling and Testing, Palermo, Italy, 14–16 September 2020; pp. 50–54. [Google Scholar]
- Crotti, G.; Van Den Brom, H.E.; Mohns, E.; Tinarelli, R.; Luiso, M.; Styblikova, R.; Almutairi, M. Measurement methods and procedures for assessing accuracy of instrument transformers for power quality measurements. In Proceedings of the CPEM Digest (Conference on Precision Electromagnetic Measurements), Denver, CO, USA, 24–28 August 2020. [Google Scholar]
- Ghosh, S.S.; Narayanan, G. Experimental characterisation and performance evaluation of a coaxial current transformer for measurement of insulated gate bipolar transistor switching current. IET Sci. Meas. Technol. 2015, 9, 962–972. [Google Scholar] [CrossRef]
- Koprivica, B.; Milovanovic, A. Electromagnetic characterization of current transformer with toroidal core under sinusoidal conditions. Phys. B Condens. Matter 2016, 486, 34–39. [Google Scholar] [CrossRef]
- Mingotti, A.; Peretto, L.; Tinarelli, R.; Ghaderi, A. Uncertainty sources analysis of a calibration system for the accuracy vs. temperature verification of voltage transformers. J. Phys. Conf. Ser. 2018, 1065, 052041. [Google Scholar] [CrossRef] [Green Version]
- Faifer, M.; Laurano, C.; Ottoboni, R.; Toscani, S.; Zanoni, M. Characterization of voltage instrument transformers under nonsinusoidal conditions based on the best linear approximation. IEEE Trans. Instrum. Meas. 2018, 67, 2392–2400. [Google Scholar] [CrossRef]
- Faifer, M.; Laurano, C.; Ottoboni, R.; Toscani, S.; Zanoni, M. Nonlinear behavioral modeling of voltage transformers in the frequency domain: Comparing different approaches. IEEE Trans. Instrum. Meas. 2020, 69, 8137–8145. [Google Scholar]
- Hu, X.; Siew, W.H.; Judd, M.D.; Peng, X. Transfer function characterization for HFCTs used in partial discharge detection. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 1088–1096. [Google Scholar] [CrossRef] [Green Version]
- Crotti, G.; Femine, A.D.; Gallo, D.; Giordano, D.; Landi, C.; Letizia, P.S.; Luiso, M. Traceable characterization of low power voltage instrument transformers for PQ and PMU applications. In Proceedings of the CPEM Digest (Conference on Precision Electromagnetic Measurements), Denver, CO, USA, 24–28 August 2020. [Google Scholar]
- Mingotti, A.; Peretto, L.; Bartolomei, L.; Cavaliere, D.; Tinarelli, R. Are inductive current transformers performance really affected by actual distorted network conditions? An experimental case study. Sensors 2020, 20, 927. [Google Scholar] [CrossRef] [Green Version]
- Mingotti, A.; Peretto, L.; Tinarelli, R.; Zhang, J. Use of COMTRADE fault current data to test inductive current transformers. In Proceedings of the 2019 IEEE International Workshop on Metrology for Industry 4.0 and IoT, MetroInd 4.0 and IoT, Naples, Italy, 4–6 June 2019; pp. 103–107. [Google Scholar]
- Barragán-Villarejo, M.; de Paula García-López, F.; Marano-Marcolini, A.; Maza-Ortega, J.M. Power system hardware in the loop (PSHIL): A holistic testing approach for smart grid technologies. Energies 2020, 13, 3858. [Google Scholar] [CrossRef]
- Bokal, M.; Papic, I.; Blazic, B. Stabilization of hardware-in-the-loop ideal transformer model interfacing algorithm by using spectrum assignment. IEEE Trans. Power Deliv. 2019, 34, 1865–1873. [Google Scholar] [CrossRef]
- Ebe, F.; Idlbi, B.; Stakic, D.E.; Chen, S.; Kondzialka, C.; Casel, M.; Strasser, T.I. Comparison of power hardware-in-the-loop approaches for the testing of smart grid controls. Energies 2018, 11, 3381. [Google Scholar] [CrossRef] [Green Version]
- Langston, J.; Szymanski, T.; Schoder, K.; Steurer, M.M.; Roberts, R.G. Practical estimation of accuracy in power hardware-in-the-loop simulation using impedance measurements. IEEE Trans. Power Syst. 2021, 36, 2584–2593. [Google Scholar] [CrossRef]
- Murugan, S.K.; Simon, S.P.; Sundareswaran, K.; Panugothu, S.R.N.; Padhy, N.P. Hardware-in-the loop testing of power transformer differential relay using RTDS and DSP. Electr. Power Compon. Syst. 2019, 47, 1090–1100. [Google Scholar] [CrossRef]
- Chao, Z.; Yizhao, L.; Ronggui, L.; Jun, G.; Mi, Z. Power distribution network based on digital 3D twin panoramic modeling. E3S Web Conf. 2020, 204, 02005. [Google Scholar] [CrossRef]
- Feng, Z.; Cui, Q.; Zhang, Y.; Chi, Z.; Zhang, X.; Bai, X.; Zhu, S. Online assessment of flexibility on active distribution network planning through digital twin. In Proceedings of the ICECIE 2020–2020 2nd International Conference on Electrical, Control and Instrumentation Engineering, Kuala Lumpur, Malaysia, 28–28 November 2020. [Google Scholar]
- Song, X.; Cai, H.; Kircheis, J.; Jiang, T.; Schlegel, S.; Westermann, D. Investigation of inventive tuning algorithm for the realization of digital twins of inverter model in inverter-dominated power distribution grid. In Proceedings of the NEIS 2020-Conference on Sustainable Energy Supply and Energy Storage Systems, Bucharest, Romania, 29 September–2 October 2019; pp. 143–148. [Google Scholar]
- Wagner, T.; Mehlmann, G.; Richter, M. Application of the digital twin concept for a distribution network. In Proceedings of the PESS 2020—IEEE Power and Energy Student Summit, 5–7 October 2020; pp. 160–164. Available online: https://ieeexplore.ieee.org/abstract/document/9273795 (accessed on 28 July 2021).
- Stifter, M.; Cordova, J.; Kazmi, J.; Arghandeh, R. Real-time simulation and hardware-in-the-loop testbed for distribution synchrophasor applications. Energies 2018, 11, 876. [Google Scholar] [CrossRef] [Green Version]
- Quintero-Zuluaga, F.; Viana-Villa, P.; Giraldo-Gomez, D.; Arboleda, B.; Villegas, D.; Sanchez, M.; Duque, N. Hardware in the loop design and testing of a PMU-based special protection scheme: Case study of colombia-ecuador interconnection. In Proceedings of the 2020 IEEE PES Transmission and Distribution Conference and Exhibition-Latin America, T and D LA, Montevideo, Uruguay, 28 September–2 October 2020. [Google Scholar]
- Al-Hammouri, A.T.; Nordstrom, L.; Chenine, M.; Vanfretti, L.; Honeth, N.; Leelaruji, R. Virtualization of synchronized phasor measurement units within real-time simulators for smart grid applications. In Proceedings of the 2020 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012. [Google Scholar]
- Frigo, G.; Derviškadić, A.; Zuo, Y.; Bach, A.; Paolone, M. Taylor-Fourier PMU on a Real-Time Simulator: Design, Implementation and Characterization. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Amin, M.M. Experimental validation of high performance HIL-based real-time PMU model for WAMS. IEEE Trans. Ind. Appl. 2020, 56, 2382–2392. [Google Scholar] [CrossRef]
- Xu, Q.; Li, P.; Yuan, Z.; Yu, L. Comprehensive and adaptive synchrophasor estimator and hardware-in-loop test. In Proceedings of the ISPEC 2019—IEEE Sustainable Power and Energy Conference: Grid Modernization for Energy Revolution, Beijing, China, 21–23 November 2019; pp. 1321–1326. [Google Scholar]
- Gao, Y.; Kirli, D.; Zeinali, M.; Mukherjee, S.; Birzhanova, A.; Thompson, J.; Kiprakis, A. Development of a hardware in-the-loop co-simulation platform for smart distribution networks. In Proceedings of the 2020 15th International Conference on Ecological Vehicles and Renewable Energies, EVER 2020, Monte-Carlo, Monaco, 10–12 September 2020. [Google Scholar]
- Ihrens, J.; Möws, S.; Wilkening, L.; Kern, T.A.; Becker, C. The impact of time delays for power hardware-in-the-loop investigations. Energies 2021, 14, 3154. [Google Scholar] [CrossRef]
- IEC 60255–118–1:2018. Measuring Relays and Protection Equipment, Part 118–1: Synchrophasor for Power Systems–Measurements; International Standardization Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Barchi, G.; Macii, D.; Petri, D. Synchrophasor Estimators Accuracy: A Comparative Analysis. IEEE Trans. Instrum. Meas. 2013, 62, 963–973. [Google Scholar] [CrossRef]
- Frigo, G.; Colangelo, D.; Derviškadić, A.; Pignati, M.; Narduzzi, C.; Paolone, M. Definition of Accurate Reference Synchrophasors for Static and Dynamic Characterization of PMUs. IEEE Trans. Instrum. Meas. 2017, 66, 2233–2246. [Google Scholar] [CrossRef]
- Qian, C.; Kezunovic, M. Synchrophasor reference algorithm for PMU Calibration Systems. In Proceedings of the IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Dallas, TX, USA, 3–5 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, S.; Liu, H.; Bi, T.; Martin, K.E. A High-Accuracy Phasor Estimation Algorithm for PMU Calibration and Its Hardware Implementation. IEEE Trans. Smart Grid 2020, 11, 3372–3383. [Google Scholar] [CrossRef]
- Colangelo, D.; Zanni, L.; Pignati, M.; Romano, P.; Paolone, M.; Braun, J.-P.; Bernier, L.-G. Architecture and characterization of a calibrator for PMUs operating in power distribution systems. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Frigo, G.; Derviškadić, A.; Colangelo, D.; Braun, J.P.; Paolone, M. Characterization of uncertainty contributions in a high-accuracy PMU validation system. Measurement 2019, 146, 72–86. [Google Scholar] [CrossRef]
- Meyur, R.; Stenbakken, G.N.; Centeno, V. A LabVIEW based test system to characterize phasor measurement units. In Proceedings of the 2017 North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Tang, Y.; Stenbakken, G.N.; Goldstein, A. Calibration of Phasor Measurement Unit at NIST. IEEE Trans. Instrum. Meas. 2013, 62, 1417–1422. [Google Scholar] [CrossRef]
- Braun, J.; Mester, C. Reference grade calibrator for the testing of the dynamic behavior of phasor measurement units. In Proceedings of the 2012 Conference on Precision electromagnetic Measurements, Washington, DC, USA, 1–6 July 2012; pp. 410–411. [Google Scholar] [CrossRef]
- Colangelo, D.; Hoogenboom, D.; Dierikx, E.; Rietveld, G.; Frigo, G. Metrological characterization of a PMU calibrator in the 25 Hz to 3 kHz range. In Proceedings of the 2017 IEEE Manchester PowerTech, Manchester, UK, 18–22 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Georgakopoulos, D.; Quigg, S. Precision Measurement System for the Calibration of Phasor Measurement Units. IEEE Trans. Instrum. Meas. 2017, 66, 1441–1445. [Google Scholar] [CrossRef]
- Trinchera, B.; Serazio, D.; Pogliano, U. Asynchronous Phase Comparator for Characterization of Devices for PMUs Calibrator. IEEE Trans. Instrum. Meas. 2017, 66, 1139–1145. [Google Scholar] [CrossRef]
- Castello, P.; Muscas, C.; Pegoraro, P.A.; Sulis, S.; Toscani, S. Experimental characterization of dynamic methods for synchrophasor measurements. In Proceedings of the 2014 IEEE International Workshop on Applied Measurements for Power Systems Proceedings (AMPS), Aachen, Germany, 24–26 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Almas, M.S.; Kilter, J.; Vanfretti, L. Experiences with steady-state PMU compliance testing using standard relay testing equipment. In Proceedings of the 2014 Electric Power Quality and Supply Reliability Conference (PQ), Rakvere, Estonia, 11–13 June 2014; pp. 103–110. [Google Scholar] [CrossRef] [Green Version]
- Luiso, M.; Macii, D.; Tosato, P.; Brunelli, D.; Gallo, D.; Landi, C. A Low-Voltage Measurement Testbed for Metrological Characterization of Algorithms for Phasor Measurement Units. IEEE Trans. Instrum. Meas. 2018, 67, 2420–2433. [Google Scholar] [CrossRef]
- Trimble Time and Frequency. Available online: https://timing.trimble.com/wp-content/uploads/thunderbolt-e-gps-disciplined-clock-datasheet.pdf (accessed on 28 July 2021).
- NI. Available online: https://www.ni.com/documentation/en/multifunction-io-device/latest/specs-usb-6346/specs/ (accessed on 28 July 2021).
- Keysight Technologies. Available online: https://www.keysight.com/it/en/assets/9018–01343/user-manuals/9018–01343.pdf (accessed on 28 July 2021).
- Tektronix. Available online: https://download.tek.com/datasheet/5-Series-MSO-Datasheet-48W6085016.pdf (accessed on 28 July 2021).
- Uncertainty of Measurement, Part 3: Guide to the Expression of Uncertainty in Measurement; (GUM 1995), ISO/IEC Guide 98–3:2008; International Standardization Organization: Geneva, Switzerland, 2008.
- Belega, D.; Petri, D. Accuracy Analysis of the Multicycle Synchrophasor Estimator Provided by the Interpolated DFT Algorithm. IEEE Trans. Instrum. Meas. 2013, 62, 942–953. [Google Scholar] [CrossRef]
- Jin, T.; Zhang, W. A Novel Interpolated DFT Synchrophasor Estimation Algorithm with an Optimized Combined Cosine Self-Convolution Window. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar]
- Bi, T.; Liu, H.; Feng, Q.; Qian, C.; Liu, Y. Dynamic Phasor Model-Based Synchrophasor Estimation Algorithm for M-Class PMU. IEEE Trans. Power Deliv. 2015, 30, 1162–1171. [Google Scholar] [CrossRef]
- Ferrero, R.; Pegoraro, P.A.; Toscani, S. Synchrophasor Estimation for Three-Phase Systems Based on Taylor Extended Kalman Filtering. IEEE Trans. Instrum. Meas. 2020, 69, 6723–6730. [Google Scholar] [CrossRef]
- Dubey, A.; Chakrabarti, S.; Terzija, V. Testing and validation of a dynamic estimator of states in OPAL-RT real time simulator. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]
- Muscas, C.; Pegoraro, P.A.; Sulis, S.; Pau, M.; Ponci, F.; Monti, A. New Kalman Filter Approach Exploiting Frequency Knowledge for Accurate PMU-Based Power System State Estimation. IEEE Trans. Instrum. Meas. 2020, 69, 6713–6722. [Google Scholar] [CrossRef]
- Xu, S.; Liu, H.; Bi, T.; Martin, K.E. An improved Taylor weighted least squares method for estimating synchrophasor. Int. J. Electr. Power Energy Syst. 2020, 120, 105987. [Google Scholar] [CrossRef]
- Toscani, S.; Muscas, C.; Pegoraro, P.A. Design and Performance Prediction of Space Vector-Based PMU Algorithms. IEEE Trans. Instrum. Meas. 2017, 66, 394–404. [Google Scholar] [CrossRef] [Green Version]
- Qian, C.; Kezunovic, M. A Power Waveform Classification Method for Adaptive Synchrophasor Estimation. IEEE Trans. Instrum. Meas. 2018, 67, 1646–1658. [Google Scholar] [CrossRef]
- Kamwa, I.; Samantaray, S.R.; Joos, G. Wide Frequency Range Adaptive Phasor and Frequency PMU Algorithms. IEEE Trans. Smart Grid 2014, 5, 569–579. [Google Scholar] [CrossRef]
- Amirat, Y.; Oubrahim, Z.; Ahmed, H.; Benbouzid, M.; Wang, T. Phasor Estimation for Grid Power Monitoring: Least Square vs. Linear Kalman Filter. Energies 2020, 13, 2456. [Google Scholar] [CrossRef]
- Zhan, L.; Liu, Y.; Liu, Y. A Clarke Transformation-Based DFT Phasor and Frequency Algorithm for Wide Frequency Range. IEEE Trans. Smart Grid 2018, 9, 67–77. [Google Scholar] [CrossRef]
- Messina, F.; Marchi, P.; Vega, L.R.; Galarza, C.G.; Laiz, H. A Novel Modular Positive-Sequence Synchrophasor Estimation Algorithm for PMUs. IEEE Trans. Instrum. Meas. 2017, 66, 1164–1175. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DAC Properties | Value |
|---|---|
| Resolution | 16 bit |
| Full range | ±10 V |
| Max sampling rate | 900 kSa/s |
| GPS Properties | Value |
|---|---|
| PPS accuracy | 15 ns (one sigma) |
| 10 MHz clock accuracy | Hz (one day average) |
| 10 MHz stability | See Allan deviation graph in [63] |
| Set Point (% of Nominal Value) | Peak Set Point (V) | RMS Set Point V X1 |
|---|---|---|
| 10 | 0.5 | ≈0.35 |
| 20 | 1 | ≈0.71 |
| 50 | 2.5 | ≈1.77 |
| 100 | 5 | ≈3.54 |
| 120 | 6 | ≈4.24 |
| 150 | 7.5 | ≈5.30 |
| 200 | 10 | ≈7.07 |
| 50 Hz Component (% of Nominal Value) | Harmonic Component Order h | Harmonic Component Magnitude (% of 50 Hz Signal Nominal Value) | |
|---|---|---|---|
| Single harmonic component test signal | 0 | From 2 to 50 | 10 |
| Standard harmonic distortion test signal | 100 | 2 | 10 |
| 3 | 10 | ||
| 5 | 10 | ||
| 7 | 10 | ||
| 11 | 10 | ||
| 20 | 10 | ||
| 30 | 10 | ||
| 50 | 10 |
(V) | (V) | (V) | (V) | (V) | (V) |
|---|---|---|---|---|---|
| 0.3535534 | 0.3535314 | ||||
| 0.7071068 | 0.7070302 | ||||
| 1.767767 | 1.767642 | ||||
| 3.535534 | 3.535152 | ||||
| 4.242641 | 4.242152 | ||||
| 5.303301 | 5.302879 | ||||
| 7.071068 | 7.070681 |
(V) | (V) | (V) | (V) | (V) | (V) | |
|---|---|---|---|---|---|---|
| 5 | 0.3535534 | 0.3535502 | ||||
| 50 | 0.3535131 |
(V) | (V) | (V) | (V) | (V) | (V) | |
|---|---|---|---|---|---|---|
| 2 | 3.5531676 | 3.552858 | ||||
| 3 | 3.552888 | |||||
| 5 | 3.552913 | |||||
| 7 | 3.552886 | |||||
| 11 | 3.552876 | |||||
| 20 | 3.552886 | |||||
| 30 | 3.552893 | |||||
| 50 | 3.552720 |
(Hz) | (Hz) | (Hz) | (Hz) | (Hz) | (Hz) | (Hz) | (Hz) | (Hz) |
|---|---|---|---|---|---|---|---|---|
| 45.0 | 45.000000 | 0 | ||||||
| 45.5 | 45.500002 | − | ||||||
| 46.0 | 46.000001 | |||||||
| 46.5 | 46.500001 | |||||||
| 47.0 | 47.000001 | |||||||
| 47.5 | 47.500002 | |||||||
| 48.0 | 48.000001 | |||||||
| 48.5 | 48.500006 | − | ||||||
| 49.0 | 49.000003 | − | ||||||
| 49.5 | 49.500000 | − | ||||||
| 50.0 | 50.000002 | 0 | ||||||
| 50.5 | 50.500000 | − | − | |||||
| 51.0 | 51.000001 | |||||||
| 51.5 | 51.500007 | |||||||
| 52.0 | 52.000003 | − | ||||||
| 52.5 | 52.500004 | − | ||||||
| 53.0 | 53.000006 | |||||||
| 53.5 | 53.500004 | − | ||||||
| 54.0 | 54.000005 | |||||||
| 54.5 | 54.500001 | − | ||||||
| 55.0 | 55.000004 |
| 1.27 | 4 |
| 0 | 0 | |||
| 0.523598776 | 0 | 0.5236015 | ||
| 0.785398163 | 0 | 0.7854010 | ||
| 1.570796327 | 0 | 1.5707995 |
| Test Name | Peak (V) | RMS (V) | % of Rated (%) | Phase (rad) | Frequency (Hz) |
|---|---|---|---|---|---|
| A1 | 10 | 7.0710 | 200 | 0 | 50 |
| A2 | 5 | 3.5355 | 100 | 0 | 50 |
| A3 | 2.5 | 1.7677 | 50 | 0 | 50 |
| A4 | 1 | 0.7071 | 20 | 0 | 50 |
| A5 | 0.1 | 0.0707 | 10 | 0 | 50 |
| Test Name | Peak (V) | RMS (V) | % of Rated (%) | Phase (rad) | Frequency (Hz) |
|---|---|---|---|---|---|
| F1 | 5 | 3.5355 | 100 | 0 | 48 |
| F2 | 5 | 3.5355 | 100 | 0 | 48.5 |
| F3 | 5 | 3.5355 | 100 | 0 | 49 |
| F4 | 5 | 3.5355 | 100 | 0 | 49.5 |
| F5 | 5 | 3.5355 | 100 | 0 | 50 |
| F6 | 5 | 3.5355 | 100 | 0 | 50.5 |
| F7 | 5 | 3.5355 | 100 | 0 | 51 |
| F8 | 5 | 3.5355 | 100 | 0 | 51.5 |
| F9 | 5 | 3.5355 | 100 | 0 | 52 |
| Test Name | Peak (V) | RMS (V) | % of Rated (%) | Order (-) | % of 50 Hz Comp (%) |
|---|---|---|---|---|---|
| H1 | 5 | 3.5355 | 100 | 3 | 10 |
| H2 | 5 | 3.5355 | 100 | 5 | 10 |
| H3 | 5 | 3.5355 | 100 | 7 | 10 |
| H4 | 5 | 3.5355 | 100 | 9 | 10 |
| H5 | 5 | 3.5355 | 100 | 11 | 10 |
| H6 | 5 | 3.5355 | 100 | 15 | 10 |
| H7 | 5 | 3.5355 | 100 | 19 | 10 |
| H8 | 5 | 3.5355 | 100 | 21 | 10 |
| H9 | 5 | 3.5355 | 100 | 25 | 10 |
| H10 | 5 | 3.5355 | 100 | 29 | 10 |
| H11 | 5 | 3.5355 | 100 | 31 | 10 |
| H12 | 5 | 3.5355 | 100 | 35 | 10 |
| H13 | 5 | 3.5355 | 100 | 39 | 10 |
| H14 | 5 | 3.5355 | 100 | 41 | 10 |
| H15 | 5 | 3.5355 | 100 | 45 | 10 |
| H16 | 5 | 3.5355 | 100 | 49 | 10 |
| Test Name | Peak (V) | RMS (V) | % of Rated (%) | Frequency (Hz) | Phase (°) | Phase (rad) |
|---|---|---|---|---|---|---|
| P1 | 5 | 3.5355 | 100 | 50 | 0 | 0 |
| P2 | 5 | 3.5355 | 100 | 50 | 10 | 0.1745 |
| P3 | 5 | 3.5355 | 100 | 50 | 20 | 0.3490 |
| P4 | 5 | 3.5355 | 100 | 50 | 30 | 0.5235 |
| P5 | 5 | 3.5355 | 100 | 50 | 40 | 0.6981 |
| P6 | 5 | 3.5355 | 100 | 50 | 50 | 0.8726 |
| P7 | 5 | 3.5355 | 100 | 50 | 60 | 1.0471 |
| P8 | 5 | 3.5355 | 100 | 50 | 70 | 1.2217 |
| P9 | 5 | 3.5355 | 100 | 50 | 80 | 1.3962 |
| P10 | 5 | 3.5355 | 100 | 50 | 90 | 1.5707 |
| P11 | 5 | 3.5355 | 100 | 50 | 100 | 1.7453 |
| Test Name | RMS (V) | Phase (rad) | Frequency (Hz) | ROCOF (Hz/s) | ||||
|---|---|---|---|---|---|---|---|---|
| A1 | 7.0692976 | 0.0054920 | 50.0000000 | |||||
| A2 | 3.53433398 | 0.0088586 | 50.0000002 | |||||
| A3 | 1.76701027 | 0.0093632 | 50.0000000 | |||||
| A4 | 0.70625170 | 0.0035345 | 50.0000004 | |||||
| A5 | 0.06985583 | 0.007932 | 49.999975 |
| Test Name | RMS (V) | (V) | Phase (rad) | (rad) | Frequency (Hz) | (Hz) | ROCOF (Hz/s) | (Hz/s) |
| F1 | 3.5343752 | 0.0073137 | 48.0000000 | |||||
| F2 | 3.5344621 | 0.0119328 | 48.4999925 | |||||
| F3 | 3.53431802 | 0.0092100 | 48.9999999 | |||||
| F4 | 3.5344581 | 0.008737 | 49.5000027 | |||||
| F5 | 3.53448223 | 0.0031022 | 49.9999971 | |||||
| F6 | 3.5344243 | 0.0027930 | 50.4999894 | |||||
| F7 | 3.5342794 | 0.0034803 | 50.9999988 | |||||
| F8 | 3.5344108 | 0.0072208 | 51.4999955 | |||||
| F9 | 3.5342751 | 0.0047451 | 52.0000001 |
| Test Name | RMS (V) | Phase (rad) | Frequency (Hz) | ROCOF (Hz/s) | ||||
|---|---|---|---|---|---|---|---|---|
| H1 | 3.53444568 | 0.0055126 | 50.0000008 | |||||
| H2 | 3.53421753 | 0.0076177 | 50.0000070 | |||||
| H3 | 3.53443023 | 0.0089869 | 50.0000075 | |||||
| H4 | 3.5342145 | 0.0082917 | 50.0000136 | |||||
| H5 | 3.53439991 | 0.0091382 | 49.9999942 | |||||
| H6 | 3.5343785 | 0.0054355 | 50.0000072 | |||||
| H7 | 3.5343746 | 0.0072207 | 50.0000003 | |||||
| H8 | 3.5343741 | 0.0076282 | 50.0000000 | |||||
| H9 | 3.5342377 | 0.0085004 | 49.9999873 | |||||
| H10 | 3.5356639 | 0.005984 | 50.0000197 | |||||
| H11 | 3.5350865 | 0.0081300 | 50.0000089 | |||||
| H12 | 3.5349436 | 0.0070349 | 49.9999980 | |||||
| H13 | 3.5348042 | 0.0097929 | 49.9999977 | |||||
| H14 | 3.5347333 | 0.008859 | 50.0000258 | |||||
| H15 | 3.53484464 | 0.0043363 | 49.9999995 | |||||
| H16 | 3.5346480 | 0.008433 | 50.0000127 |
| Test Name | RMS (V) | Phase (rad) | Frequency (Hz) | ROCOF (Hz/s) | ||||
|---|---|---|---|---|---|---|---|---|
| P1 | 3.53407799 | 0.0113214 | 50.0000045 | |||||
| P2 | 3.53414587 | 0.1757891 | 49.9999982 | |||||
| P3 | 3.53423390 | 0.3574863 | 49.9999988 | |||||
| P4 | 3.53424212 | 0.5307076 | 49.9999991 | |||||
| P5 | 3.5341987 | 0.7064876 | 50.0000064 | |||||
| P6 | 3.53416886 | 0.8733776 | 49.9999999 | |||||
| P7 | 3.53417573 | 1.0548074 | 49.9999991 | |||||
| P8 | 3.5340813 | 1.224595 | 50.0000105 | |||||
| P9 | 3.5340916 | 1.4034948 | 49.9999980 | |||||
| P10 | 3.5340525 | 1.5760936 | 49.9999852 | |||||
| P11 | 3.53407339 | 1.7542494 | 49.9999982 |
| Test Name | TVE (%) | FE (Hz) | RFE (Hz/s) | |||
|---|---|---|---|---|---|---|
| A1 | 0.54970 | |||||
| A2 | 0.31161 | |||||
| A3 | 0.93710 | |||||
| A4 | 0.37348 | |||||
| A5 | 1.4512 |
| Test Name | TVE (%) | FE (Hz) | RFE (Hz/s) | |||
|---|---|---|---|---|---|---|
| F1 | 0.73198 | |||||
| F2 | 1.19348 | |||||
| F3 | 0.92148 | |||||
| F4 | 0.87410 | |||||
| F5 | 0.31161 | |||||
| F6 | 0.28105 | |||||
| F7 | 0.34979 | |||||
| F8 | 0.72267 | |||||
| F9 | 0.47577 |
| Test Name | TVE (%) | FE (Hz) | RFE (Hz/s) | |||
|---|---|---|---|---|---|---|
| H1 | 0.55204 | |||||
| H2 | 0.76254 | |||||
| H3 | 0.89909 | |||||
| H4 | 0.82986 | |||||
| H5 | 0.91423 | |||||
| H6 | 0.54446 | |||||
| H7 | 0.72270 | |||||
| H8 | 0.76340 | |||||
| H9 | 0.85068 | |||||
| H10 | 0.6461 | |||||
| H11 | 0.81305 | |||||
| H12 | 0.70363 | |||||
| H13 | 0.97941 | |||||
| H14 | 0.8861 | |||||
| H15 | 0.43403 | |||||
| H16 | 0.8436 |
| Test Name | TVE (%) | FE (Hz) | RFE (Hz/s) | |||
|---|---|---|---|---|---|---|
| P1 | 0.31161 | |||||
| P2 | 0.13178 | |||||
| P3 | 0.84269 | |||||
| P4 | 0.71170 | |||||
| P5 | 0.83629 | |||||
| P6 | 0.08218 | |||||
| P7 | 0.76181 | |||||
| P8 | 0.2903 | |||||
| P9 | 0.72415 | |||||
| P10 | 0.53129 | |||||
| P11 | 0.89278 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mingotti, A.; Costa, F.; Cavaliere, D.; Peretto, L.; Tinarelli, R. On the Importance of Characterizing Virtual PMUs for Hardware-in-the-Loop and Digital Twin Applications. Sensors 2021, 21, 6133. https://doi.org/10.3390/s21186133
Mingotti A, Costa F, Cavaliere D, Peretto L, Tinarelli R. On the Importance of Characterizing Virtual PMUs for Hardware-in-the-Loop and Digital Twin Applications. Sensors. 2021; 21(18):6133. https://doi.org/10.3390/s21186133
Chicago/Turabian StyleMingotti, Alessandro, Federica Costa, Diego Cavaliere, Lorenzo Peretto, and Roberto Tinarelli. 2021. "On the Importance of Characterizing Virtual PMUs for Hardware-in-the-Loop and Digital Twin Applications" Sensors 21, no. 18: 6133. https://doi.org/10.3390/s21186133
APA StyleMingotti, A., Costa, F., Cavaliere, D., Peretto, L., & Tinarelli, R. (2021). On the Importance of Characterizing Virtual PMUs for Hardware-in-the-Loop and Digital Twin Applications. Sensors, 21(18), 6133. https://doi.org/10.3390/s21186133