
Research on a Task Offloading Strategy for the Internet of Vehicles Based on Reinforcement Learning

Abstract
:1. Introduction
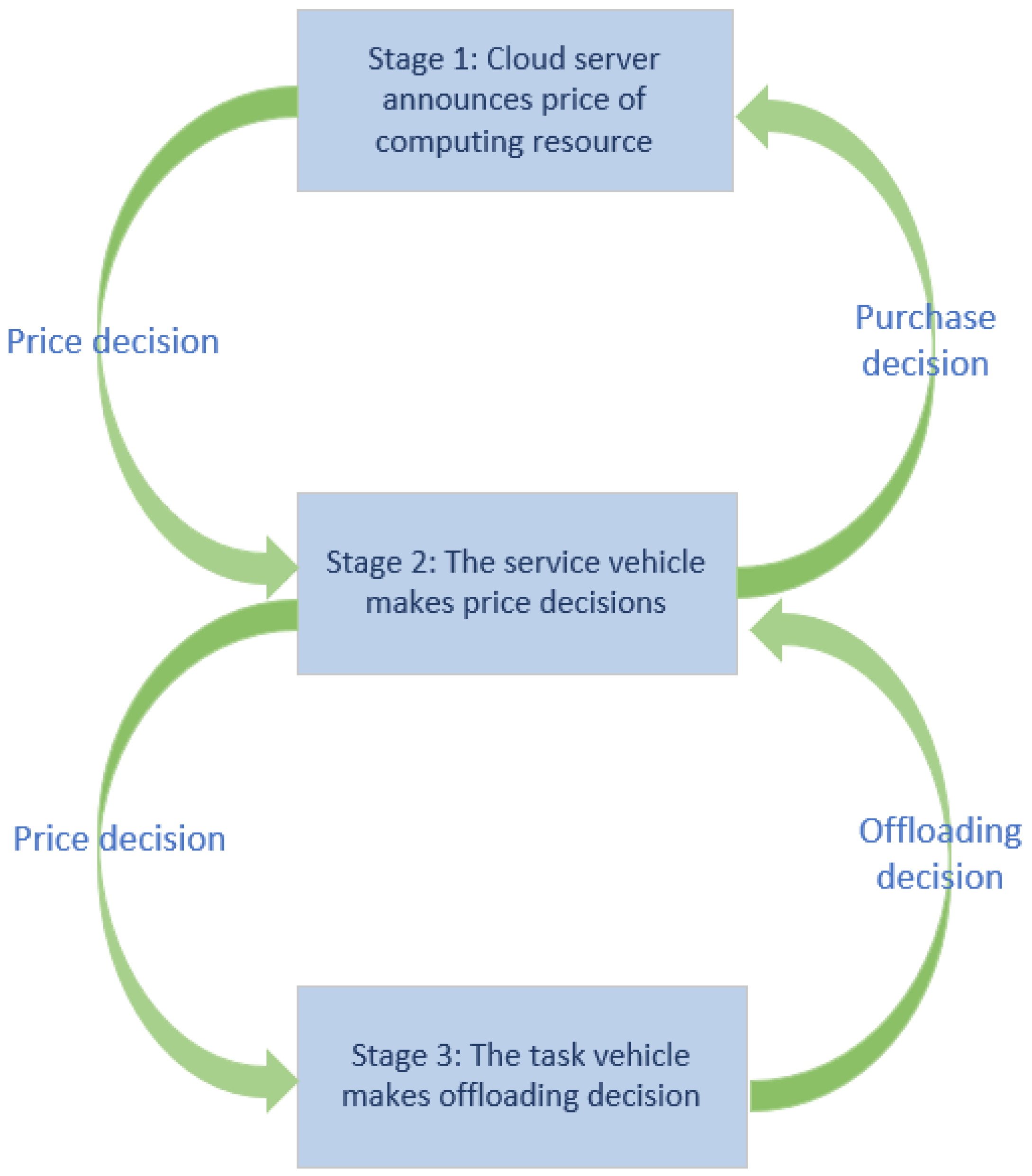
- Based on the Stackelberg game, we propose a new task offloading algorithm with deep reinforcement learning. It is different from previous research on minimizing task delays and power consumption. The goal of optimization is to reach a balance between time delay and task cost.
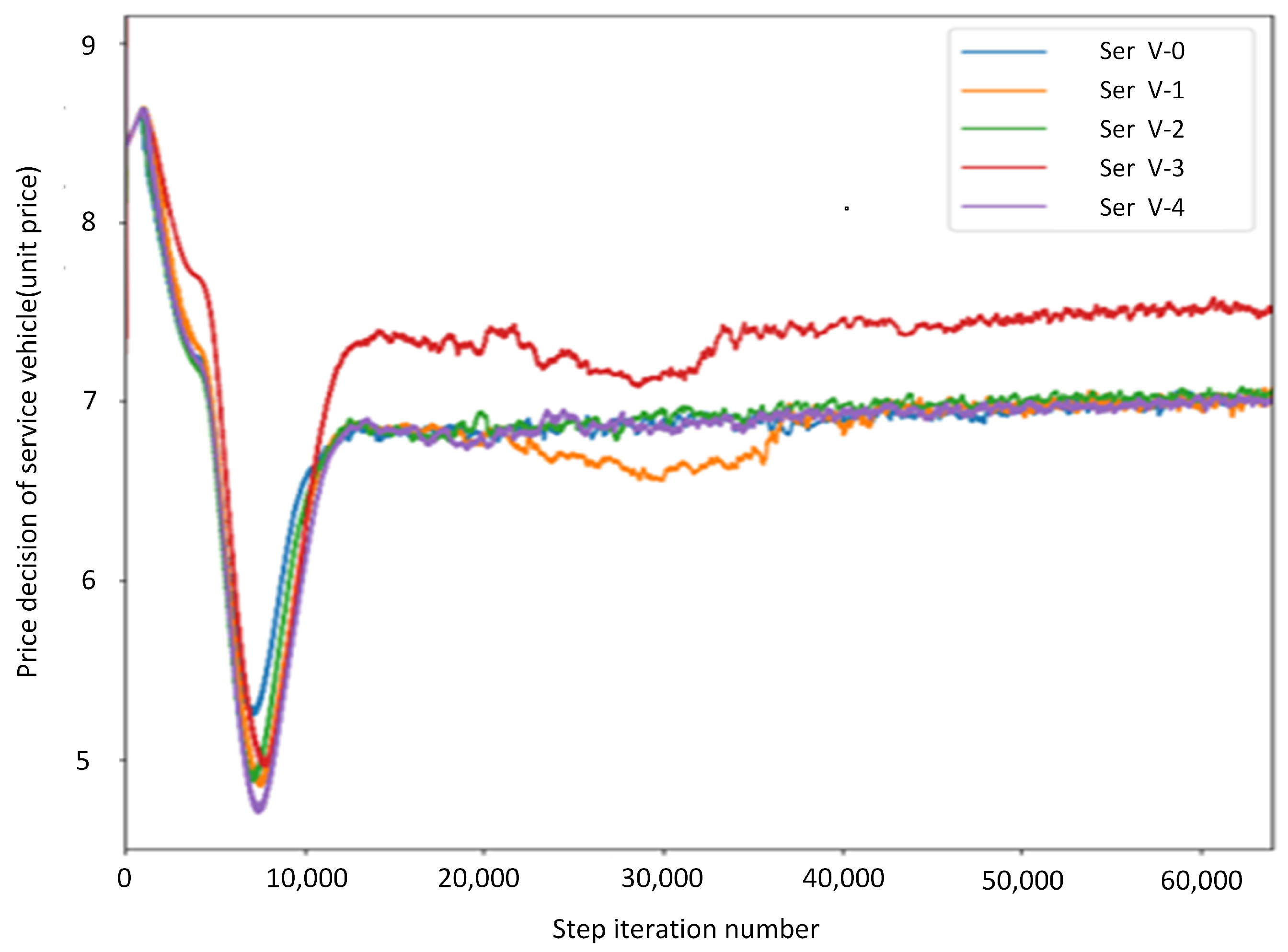
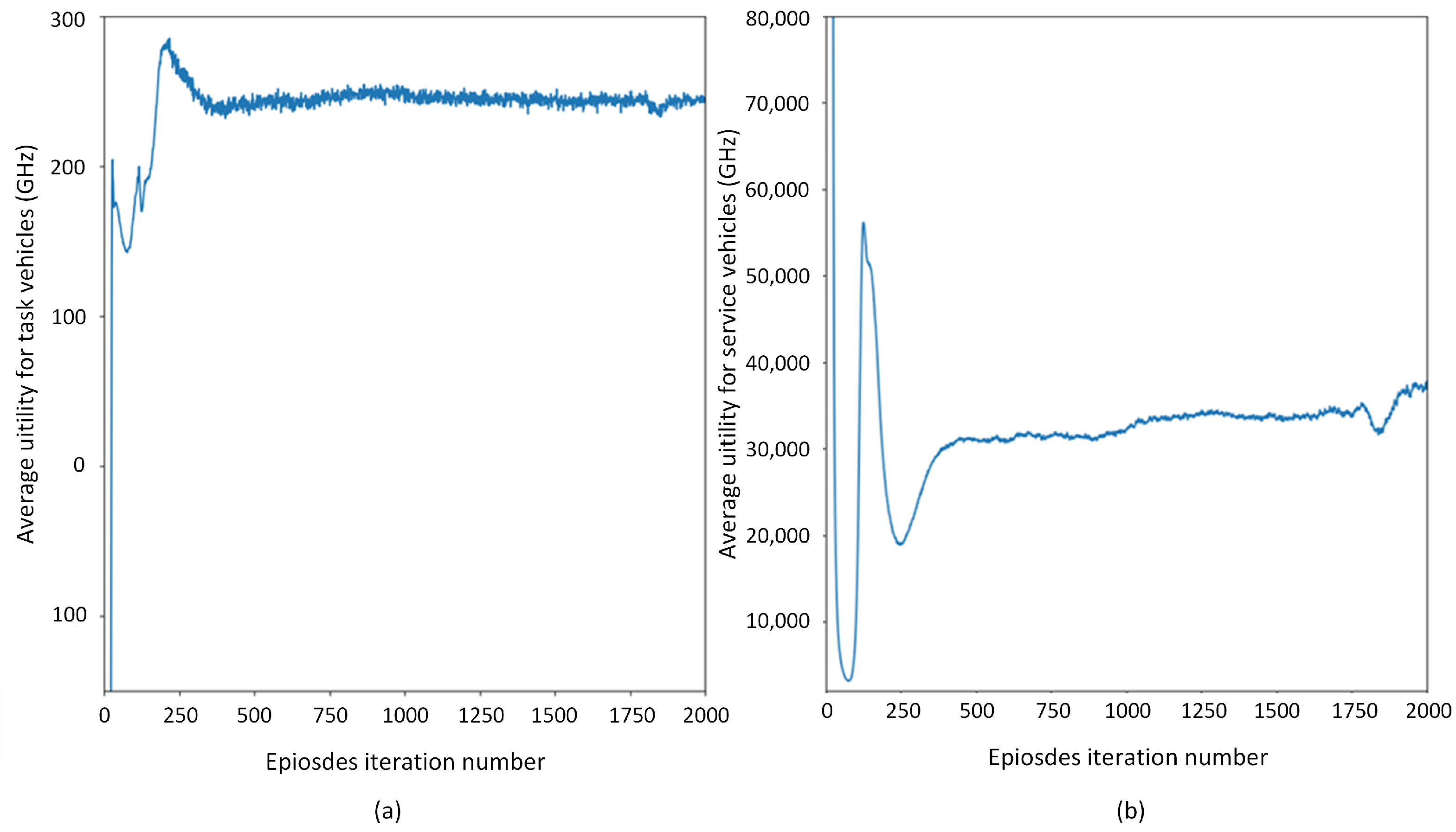
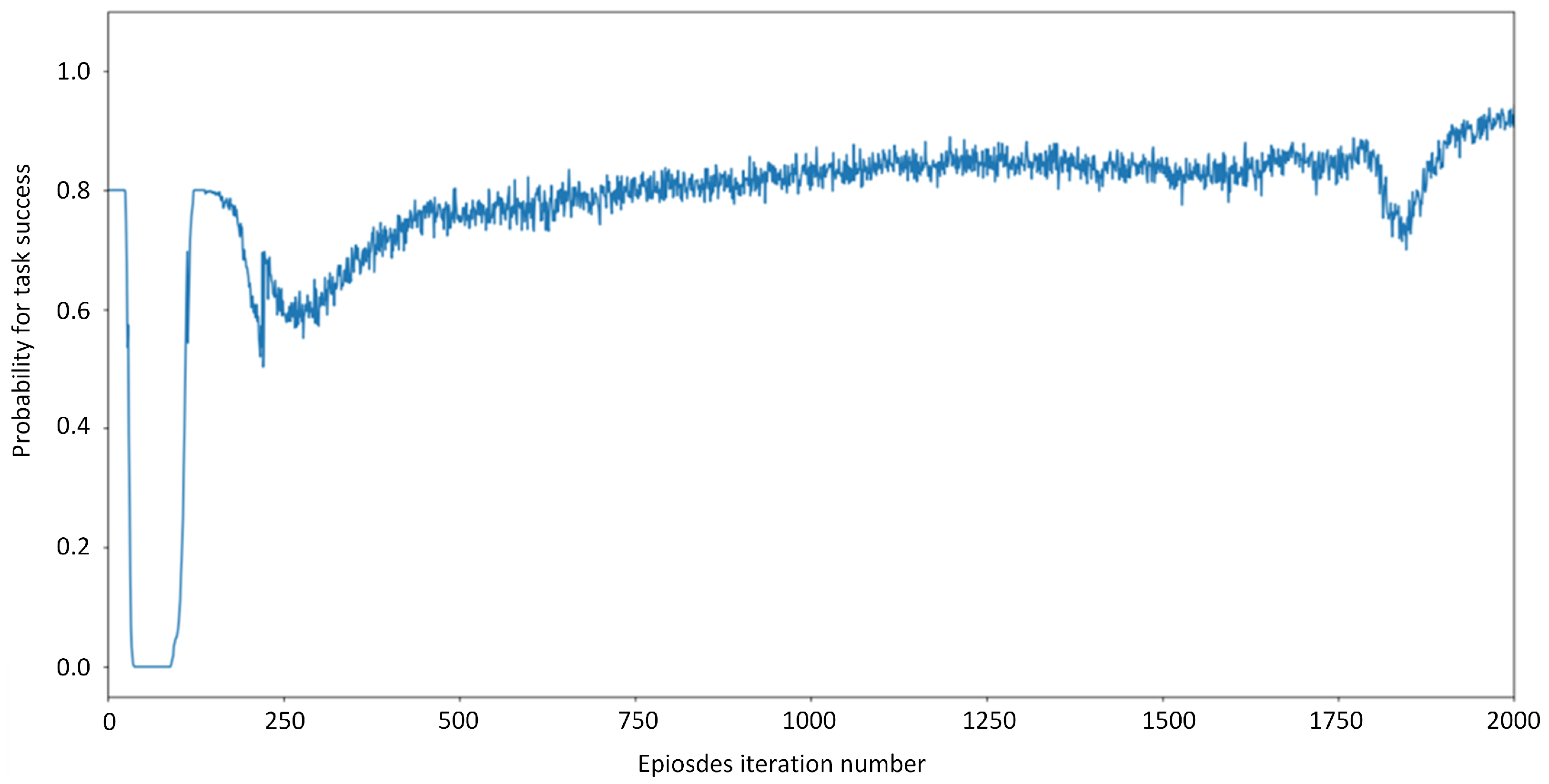
- We conduct experiments and solve the Nash equilibrium between service vehicles and task vehicles.
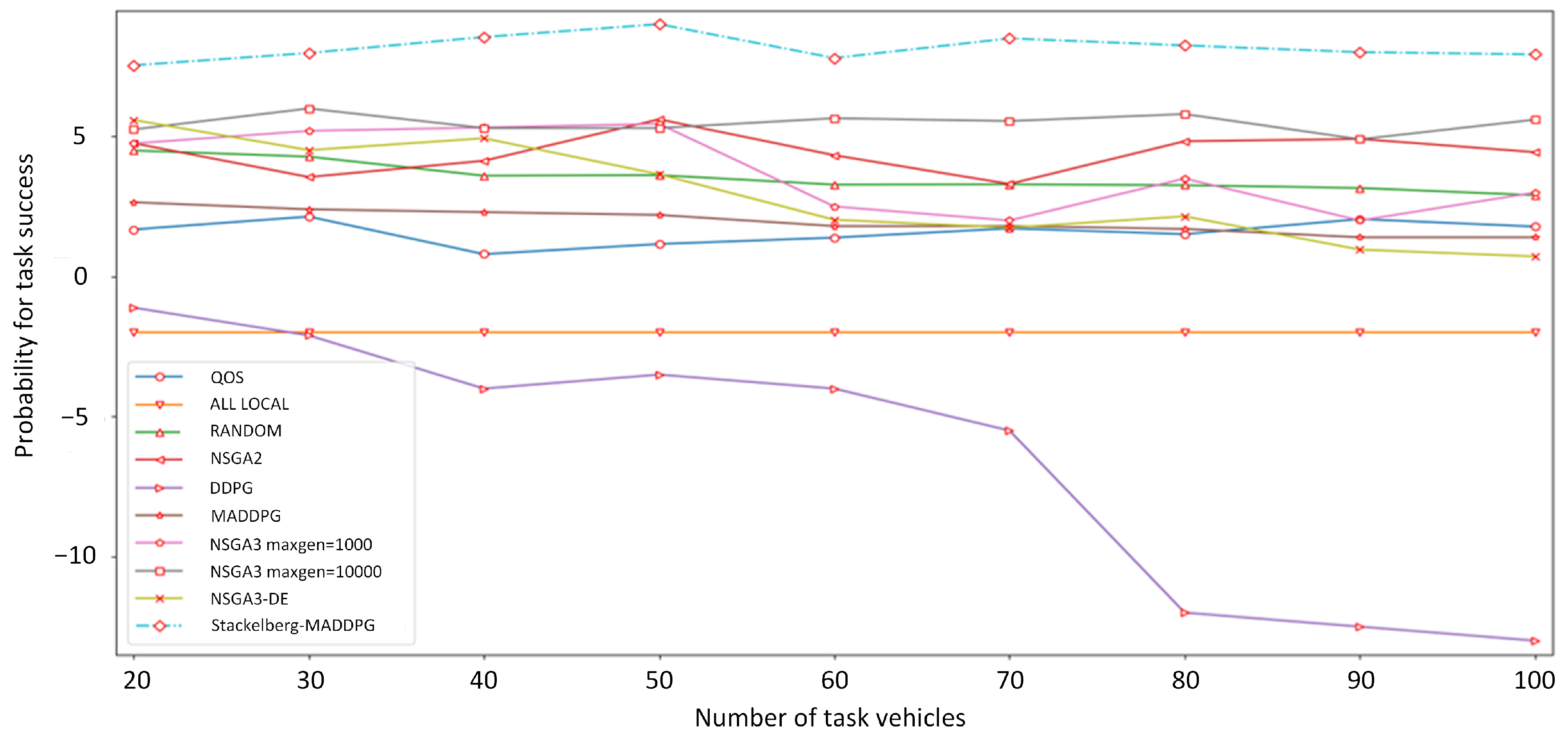
- We compare the proposed method with other algorithms. Our proposed algorithm achieves high system utility and better performance.
2. Related Work
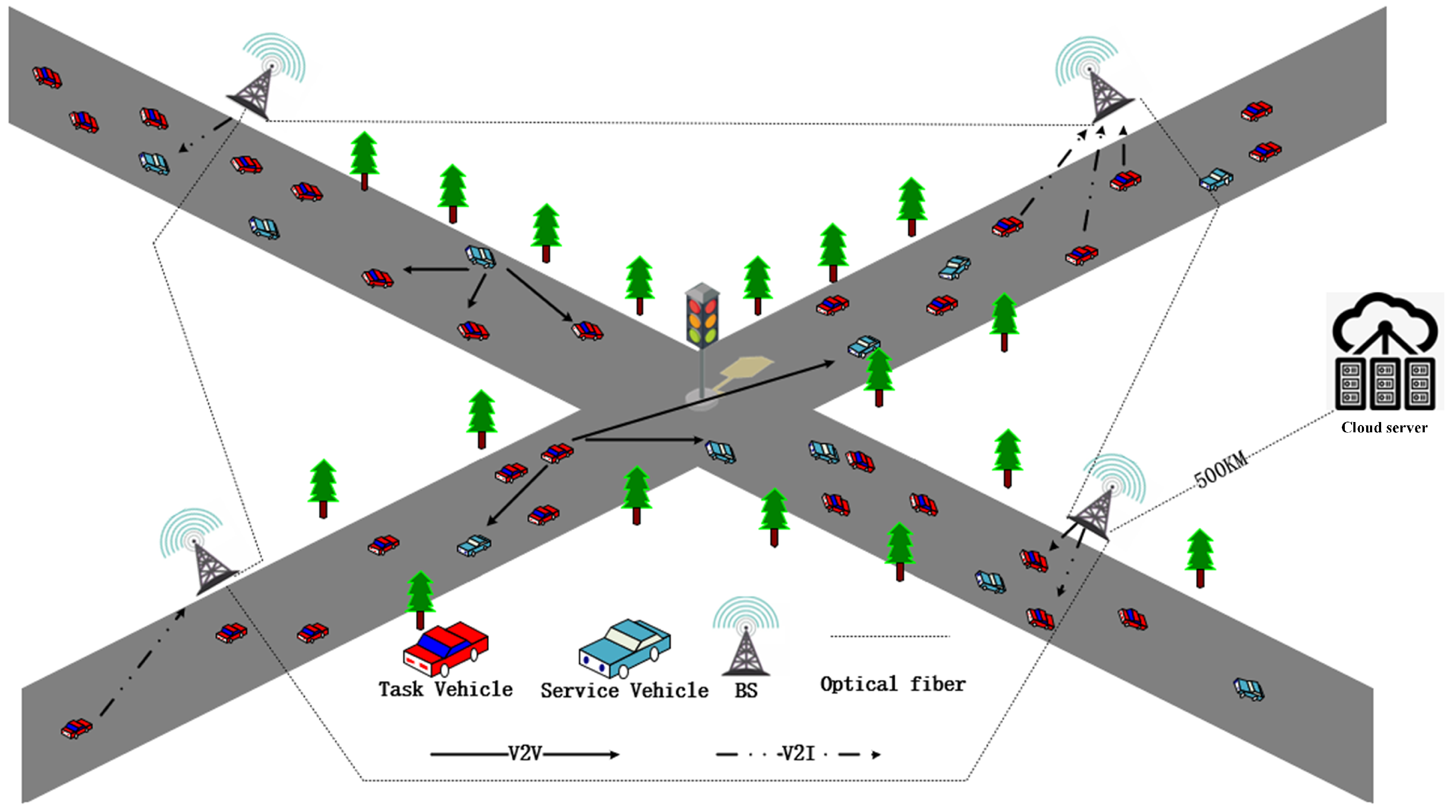
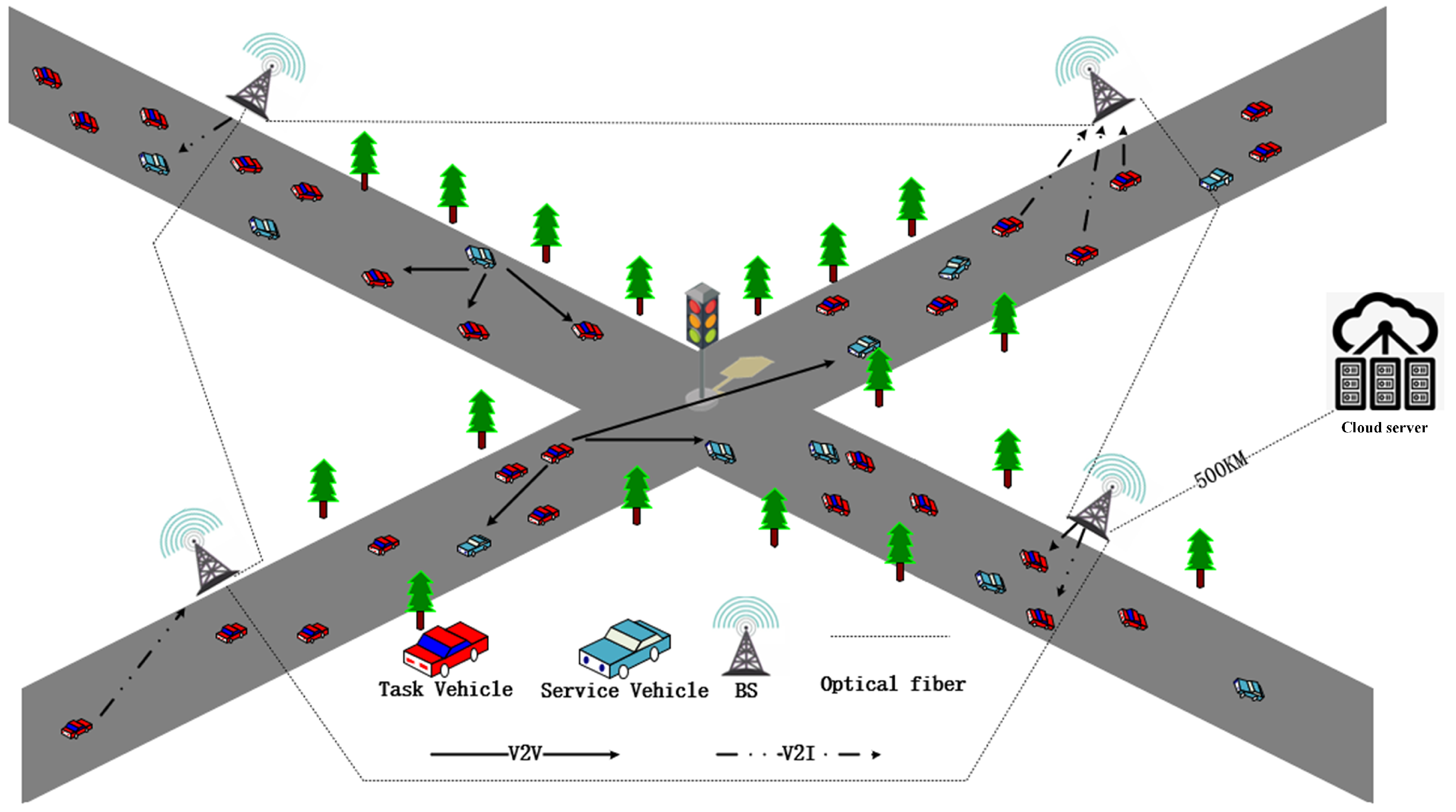
3. System Model
3.1. Communication Model
3.2. Cost Model
4. Computing Model and Utility Function
4.1. Computing Model
4.2. Utility Function
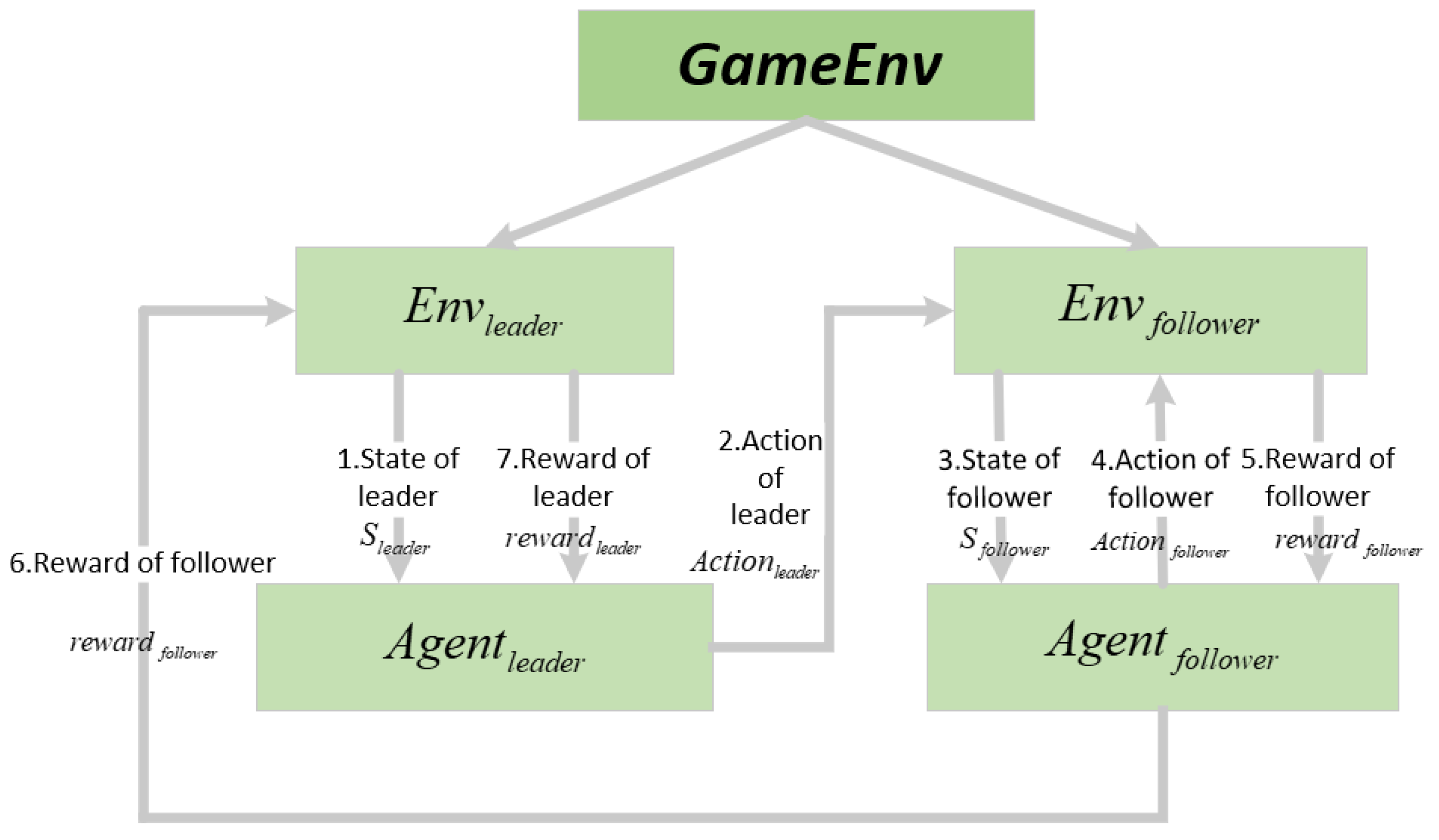
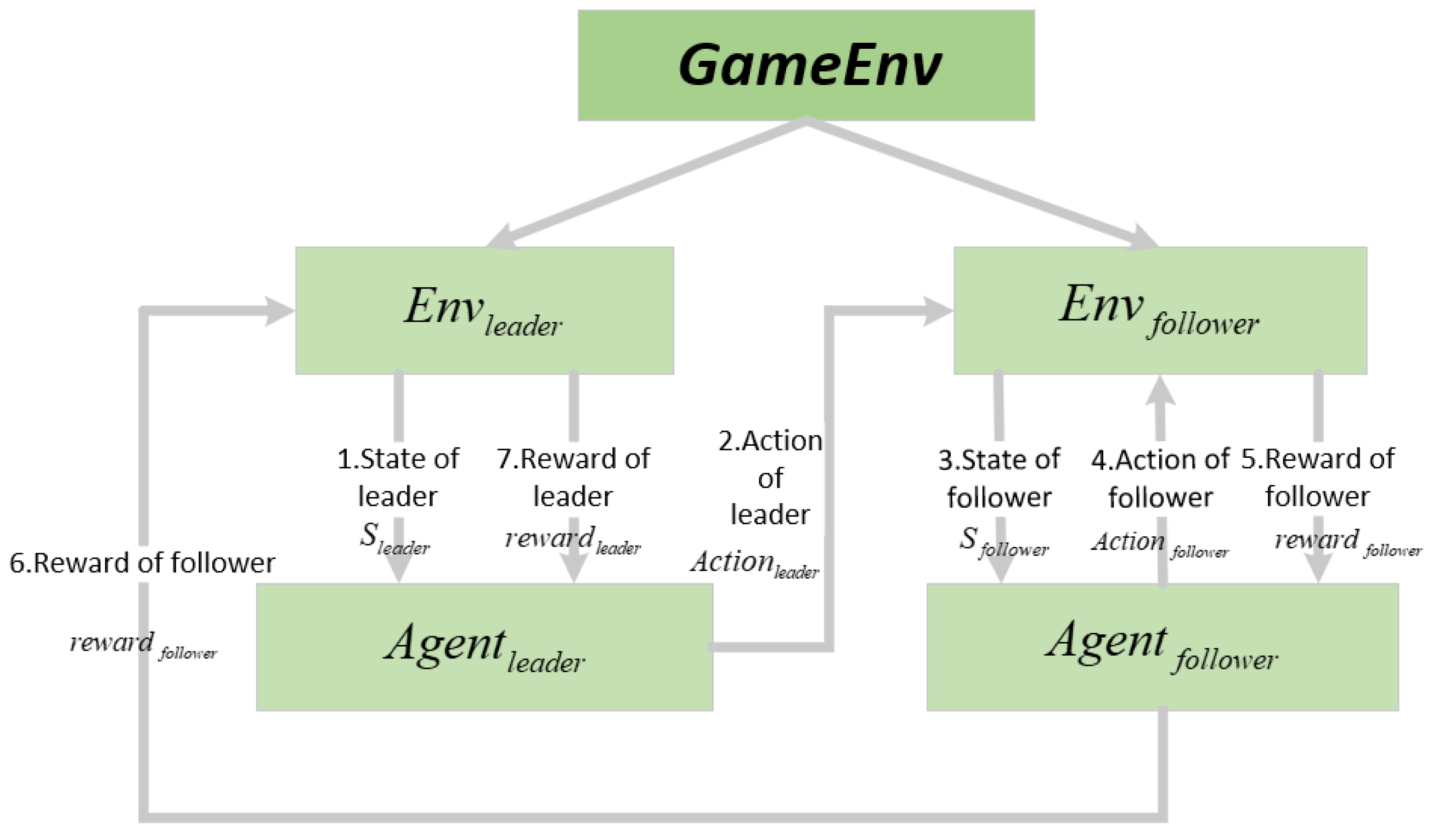
5. Stackelberg–MADDPG Task Offloading Algorithm
| Algorithm 1: Stackelberg-MADDPG algorithm in Internet of Vehicles |
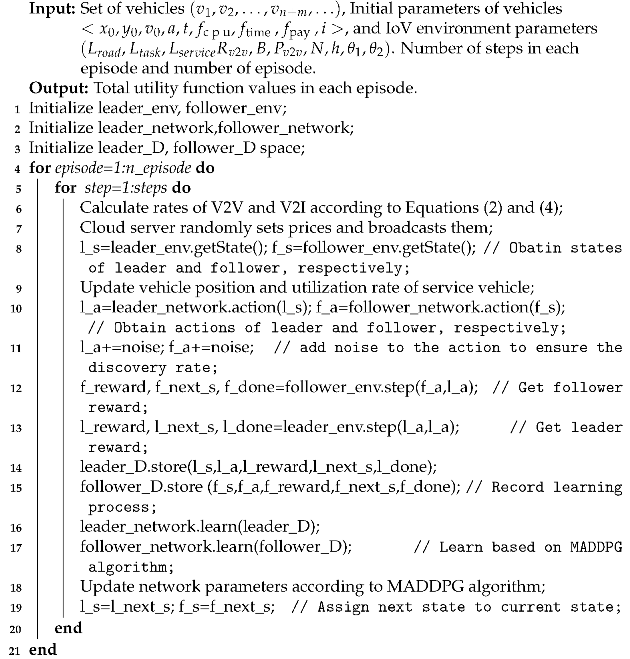 |
6. Simulation and Analysis
6.1. Experimental Settings
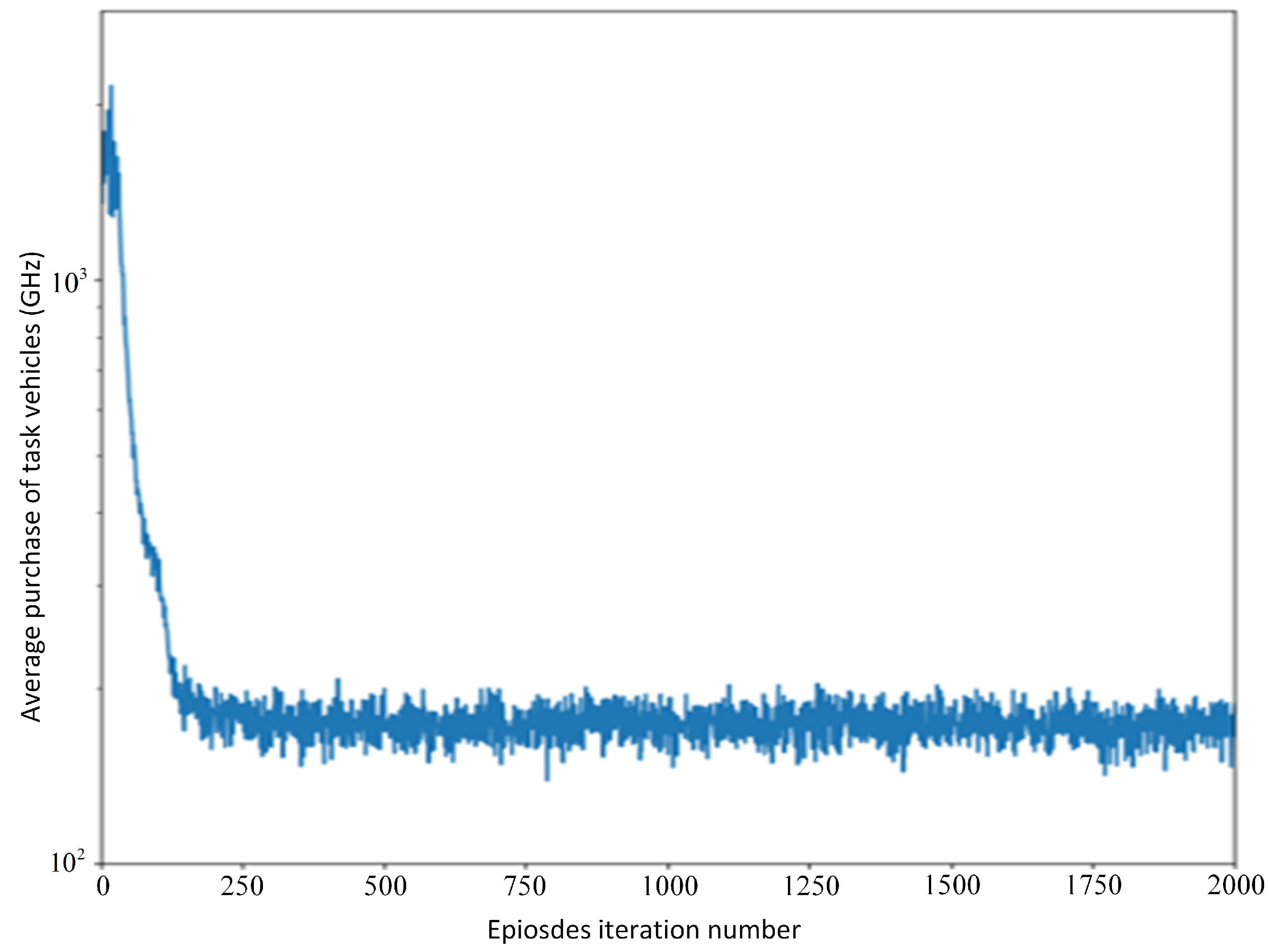
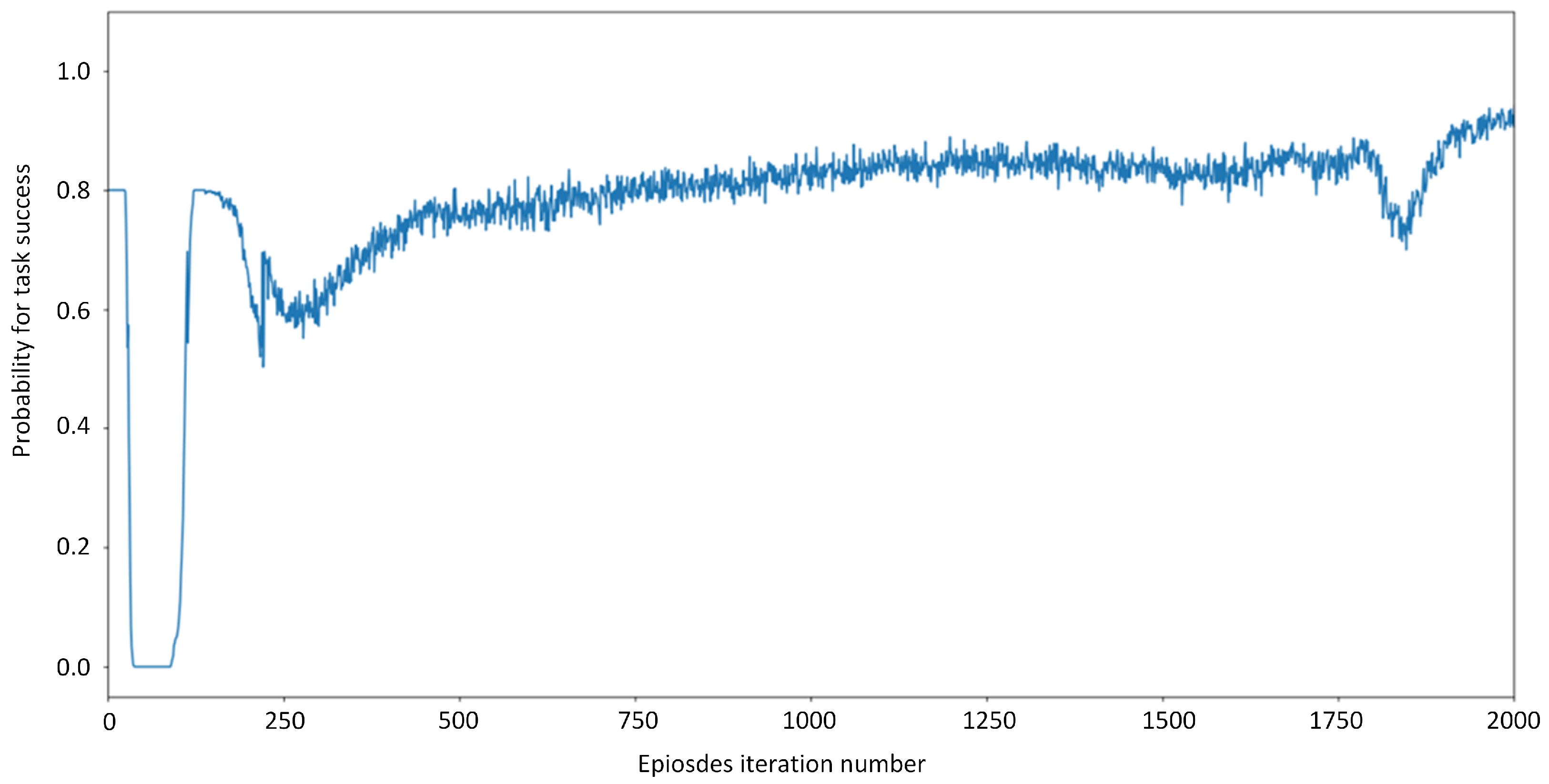
6.2. Results and Analysis
- Non-dominated Sorting Genetic Algorithms (NSGA): To obtain a Pareto optimal solution of purchase strategy and price strategy, both purchase strategy and price strategy are determined by the algorithm simultaneously. We select the results and running time of NSGA-II, NSGA-III and NSGA-III-DE algorithms. For NSGA-IIIS, to compare the influence of genetic algebra on the results, we set the maximum genetic algebras (maxgen) to 1000 and 10,000, respectively. NSGA-III-DE combines the advantages of NSGA-III and differential evolution (DE) algorithm, which optimizes the generation of offspring.
- Deep deterministic policy gradient (DDPG) algorithm: DDPG is a single agent reinforcement learning algorithm. The service vehicles and task vehicles are abstracted as an agent, and they make decisions simultaneously. The optimization objective is the weighted sum of service vehicle and task vehicle rewards.
- MADDPG algorithm: The service vehicles and task vehicles are abstracted as multiple agents, and each agent makes strategies at the same time. The optimization objective is to maximize the cumulative rewards of each agent.
- Random algorithm: Purchasing decision, local offloading ratio and edge server offloading ratio are randomly generated.
- Quality of service (QoS) algorithm: All the tasks are equally allocated to service vehicles. Task vehicles purchase the maximum computing resources to save time delay.
- All-Local algorithm: All tasks are executed locally without offloading.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, D.; Jiang, K.; Zhao, D.; Yu, C.; Cao, Z.; Xie, S.; Xiao, Z.; Jiao, X.; Wang, S.; Zhang, K. Intelligent and connected vehicles: Current status and future perspectives. Sci. China Technol. Sci. 2018, 61, 1446–1471. [Google Scholar] [CrossRef]
- Zhao, F.; Tan, H.; Liu, Z. Analysis of the Business Models of the Intelligent and Connected Vehicle Industry. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2020; Volume 325, p. 04002. [Google Scholar]
- Lin, P.; Liu, J.; Jin, P.J.; Ran, B. Autonomous vehicle-intersection coordination method in a connected vehicle environment. IEEE Intell. Transp. Syst. Mag. 2017, 9, 37–47. [Google Scholar] [CrossRef]
- Contreras-Castillo, J.; Zeadally, S.; Guerrero-Ibañez, J.A. Internet of Vehicles: Architecture, protocols, and security. IEEE Internet Things J. 2017, 5, 3701–3709. [Google Scholar] [CrossRef]
- Sharmin, Z.; Malik, A.; ur Rahman, A.; Noor, R.M. Toward Sustainable Micro-Level Fog-Federated Load Sharing in Internet of Vehicles. IEEE Internet Things J. 2020, 7, 3614–3622. [Google Scholar] [CrossRef]
- Song, F.; Zhu, M.; Zhou, Y.; You, I.; Zhang, H. Smart Collaborative Tracking for Ubiquitous Power IoT in Edge-Cloud Interplay Domain. IEEE Internet Things J. 2020, 7, 6046–6055. [Google Scholar] [CrossRef]
- Flores, H.; Hui, P.; Tarkoma, S.; Li, Y.; Srirama, S.; Buyya, R. Mobile code offloading: From concept to practice and beyond. IEEE Commun. Mag. 2015, 53, 80–88. [Google Scholar] [CrossRef]
- Cardellini, V.; Persone, V.D.N.; Valerio, V.; Facchinei, F.; Grassi, V.; Presti, F.L.; Piccialli, V. A game-theoretic approach to computation offloading in mobile cloud computing. Math. Program. 2016, 157, 421–449. [Google Scholar] [CrossRef]
- Ning, Z.; Dong, P.; Wang, X.; Guo, L.; Rodrigues, J.; Kong, X.; Huang, J.; Kwok, R.Y.K. Deep Reinforcement Learning for Intelligent Internet of Vehicles: An Energy-Efficient Computational Offloading Scheme. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 1060–1072. [Google Scholar] [CrossRef]
- Song, F.; Ai, Z.; Zhang, H.; You, I.; Li, S. Smart Collaborative Balancing for Dependable Network Components in Cyber-Physical Systems. IEEE Trans. Ind. Inform. 2021, 17, 6916–6924. [Google Scholar] [CrossRef]
- Xu, X.; Xue, Y.; Qi, L.; Yuan, Y.; Zhang, X.; Umer, T.; Wan, S. An edge computing-enabled computation offloading method with privacy preservation for internet of connected vehicles. Future Gener. Comput. Syst. 2019, 96, 89–100. [Google Scholar] [CrossRef]
- Raza, S.; Wang, S.; Ahmed, M.; Anwar, M.R. A survey on vehicular edge computing: Architecture, applications, technical issues, and future directions. Wirel. Commun. Mob. Comput. 2019, 2019. [Google Scholar] [CrossRef]
- Rocha Filho, G.P.; Meneguette, R.I.; Neto, J.R.T.; Valejo, A.; Weigang, L.; Ueyama, J.; Pessin, G.; Villas, L.A. Enhancing intelligence in traffic management systems to aid in vehicle traffic congestion problems in smart cities. Ad Hoc Netw. 2020, 107, 102265. [Google Scholar] [CrossRef]
- Si, P.; He, Y.; Yao, H.; Yang, R.; Zhang, Y. DaVe: Offloading delay-tolerant data traffic to connected vehicle networks. IEEE Trans. Veh. Technol. 2016, 65, 3941–3953. [Google Scholar] [CrossRef]
- Zhang, K.; Mao, Y.; Leng, S.; Maharjan, S.; Zhang, Y. Optimal delay constrained offloading for vehicular edge computing networks. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Hu, B.; Chen, J.; Li, F. A dynamic service allocation algorithm in mobile edge computing. In Proceedings of the 2017 IEEE International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 18–20 October 2017; pp. 104–109. [Google Scholar]
- Li, B.; Zhao, X.; Han, S.; Chen, Z. New sdn-based architecture for integrated vehicular cloud computing networking. In Proceedings of the 2018 IEEE International Conference on Selected Topics in Mobile and Wireless Networking (MoWNeT), Tianjin, China, 15–16 August 2018; pp. 1–4. [Google Scholar]
- Huang, X.; Yu, R.; Kang, J.; Zhang, Y. Distributed reputation management for secure and efficient vehicular edge computing and networks. IEEE Access 2017, 5, 25408–25420. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, S.; Huang, J.; Yang, F. A computation offloading algorithm based on game theory for vehicular edge networks. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Hou, X.; Li, Y.; Chen, M.; Wu, D.; Jin, D.; Chen, S. Vehicular fog computing: A viewpoint of vehicles as the infrastructures. IEEE Trans. Veh. Technol. 2016, 65, 3860–3873. [Google Scholar] [CrossRef]
- Li, S.; Ni, Q.; Sun, Y.; Min, G.; Al-Rubaye, S. Energy-efficient resource allocation for industrial cyber-physical IoT systems in 5G era. IEEE Trans. Ind. Inform. 2018, 14, 2618–2628. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Sun, Y.; Cao, Q.; Li, S.; Xu, H.; Shi, W. QoS-based robust power optimization for SWIPT NOMA system with statistical CSI. IEEE Trans. Green Commun. Netw. 2019, 3, 765–773. [Google Scholar] [CrossRef]
- Song, F.; Li, L.; You, I.; Zhang, H. Enabling Heterogeneous Deterministic Networks with Smart Collaborative Theory. IEEE Netw. 2021, 35, 64–71. [Google Scholar] [CrossRef]
- Zhang, K.; Mao, Y.; Leng, S.; Vinel, A.; Zhang, Y. Delay constrained offloading for mobile edge computing in cloud-enabled vehicular networks. In Proceedings of the 2016 8th IEEE International Workshop on Resilient Networks Design and Modeling (RNDM), Halmstad, Sweden, 13–15 September 2016; pp. 288–294. [Google Scholar]
- Ren, J.; Yu, G.; Cai, Y.; He, Y.; Qu, F. Partial offloading for latency minimization in mobile-edge computing. In Proceedings of the GLOBECOM 2017–2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Luoto, P.; Bennis, M.; Pirinen, P.; Samarakoon, S.; Horneman, K.; Latva-Aho, M. Vehicle clustering for improving enhanced LTE-V2X network performance. In Proceedings of the 2017 IEEE European Conference on Networks and Communications (EuCNC), Oulu, Finland, 12–15 June 2017; pp. 1–5. [Google Scholar]
- Zhang, K.; Mao, Y.; Leng, S.; He, Y.; Zhang, Y. Mobile-edge computing for vehicular networks: A promising network paradigm with predictive off-loading. IEEE Veh. Technol. Mag. 2017, 12, 36–44. [Google Scholar] [CrossRef]
- Song, F.; Zhou, Y.; Wang, Y.; Zhao, T.; You, I.; Zhang, H. Smart collaborative distribution for privacy enhancement in moving target defense. Inf. Sci. 2019, 479, 593–606. [Google Scholar] [CrossRef]
- Du, Z.; Wu, C.; Yoshinaga, T.; Yau, K.; Ji, Y.; Li, J. Federated Learning for Vehicular Internet of Things: Recent Advances and Open Issues. IEEE Open J. Comput. Soc. 2020, 1, 45–61. [Google Scholar] [CrossRef] [PubMed]
- Song, F.; Ai, Z.; Zhou, Y.; You, I.; Choo, K.; Zhang, H. Smart Collaborative Automation for Receive Buffer Control in Multipath Industrial Networks. IEEE Trans. Ind. Inform. 2020, 16, 1385–1394. [Google Scholar] [CrossRef]
- Wu, C.; Chen, X.; Yoshinaga, T.; Ji, Y.; Zhang, Y. Integrating Licensed and Unlicensed Spectrum in the Internet of Vehicles with Mobile Edge Computing. IEEE Netw. 2019, 33, 48–53. [Google Scholar] [CrossRef]
- Guo, S.; Xiao, B.; Yang, Y.; Yang, Y. Energy-efficient dynamic offloading and resource scheduling in mobile cloud computing. In Proceedings of the IEEE INFOCOM 2016-The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar]
- Xu, X.; Xue, Y.; Li, X.; Qi, L.; Wan, S. A Computation Offloading Method for Edge Computing With Vehicle-to-Everything. IEEE Access 2019, 7, 131068–131077. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Value |
|---|---|---|
| width of road | 20 m | |
| transverse length of road | 200 m | |
| longitudinal length of road | 200 m | |
| V2V communication distance | 50 m | |
| V2V communication power | 20 W | |
| V2I communication power | 30 W | |
| B | communication bandwidth | 3.5 GHz |
| computing power of task vehicle | 2.2 GHz | |
| computing power of service vehicle | 2∼5 GHz | |
| N | white Gaussian noise power | W |
| h | fading factor | 4 |
| differential price factor | ||
| server utilization normalization factor | ||
| a | price sensitive factor | 0∼1 |
| b | delay sensitive factor | 0∼1 |
| c | task success sensitive factor | 0∼1 |
| D | task data size | 1000∼1700 MB |
| reward for mission success | 20 | |
| time discount factor of utility function | 10 | |
| expenditure discount factor | 0.15 | |
| task priority discount factor | 0.16667 | |
| discount factor of task vehicle | 0.26 | |
| discount factor of service vehicle | 0.0001 | |
| computing power price of cloud sever | ||
| unit price of computer power | ||
| e | unit price of electricity | |
| a | acceleration | 0∼1 |
| initial velocity | 30∼50 km/h |
| Task Offloading | Algorithm Execution | Algorithm Training |
|---|---|---|
| Decision Algorithm | Time (s) | Time (h) |
| QoS | 0.0056 | 0 |
| All-Local | 0.0032 | 0 |
| Random | 0.0068 | 0 |
| NSGA-III-DE | 973 | 0 |
| NSGA-III (maxgen = 1000) | 62 | 0 |
| NSGA-III (maxgen = 10,000) | 1061 | 0 |
| NSGA-III | 467 | 0 |
| DDPG | 0.040 | 3 |
| MADDPG | 0.043 | 9 |
| Stackelberg-MADDPG | 0.052 | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, S.; Wang, S.; Zhuang, J.; Wang, T.; Liu, J. Research on a Task Offloading Strategy for the Internet of Vehicles Based on Reinforcement Learning. Sensors 2021, 21, 6058. https://doi.org/10.3390/s21186058
Xiao S, Wang S, Zhuang J, Wang T, Liu J. Research on a Task Offloading Strategy for the Internet of Vehicles Based on Reinforcement Learning. Sensors. 2021; 21(18):6058. https://doi.org/10.3390/s21186058
Chicago/Turabian StyleXiao, Shuo, Shengzhi Wang, Jiayu Zhuang, Tianyu Wang, and Jiajia Liu. 2021. "Research on a Task Offloading Strategy for the Internet of Vehicles Based on Reinforcement Learning" Sensors 21, no. 18: 6058. https://doi.org/10.3390/s21186058
APA StyleXiao, S., Wang, S., Zhuang, J., Wang, T., & Liu, J. (2021). Research on a Task Offloading Strategy for the Internet of Vehicles Based on Reinforcement Learning. Sensors, 21(18), 6058. https://doi.org/10.3390/s21186058