
Impact of Accurate Detection of Freeway Traffic Conditions on the Dynamic Pricing: A Case Study of I-95 Express Lanes





Abstract
1. Introduction
- A robust methodology is established to investigate the sensitivity of failed sensors and their erroneous data.
- The dynamic pricing algorithm used on Interstate-95 ELs in Florida is described and replicated (with proper calibration and validation) in MS Excel software by using Visual Basic for Applications (VBA).
- The individual impacts of the erroneous detection readings and completely failed sensors on the existing dynamic toll calculation algorithm and the resulting toll revenues of Interstate-95 ELs are quantified.
- The combined impact of multiple failed sensors and erroneous sensor data on the existing dynamic pricing algorithm and toll revenues of Interstate-95 ELs are quantified.
2. Literature Review
2.1. Dynamic Congestion Pricing Algorithms
2.2. Traffic Data Sensors
2.3. Summary
3. Methodology
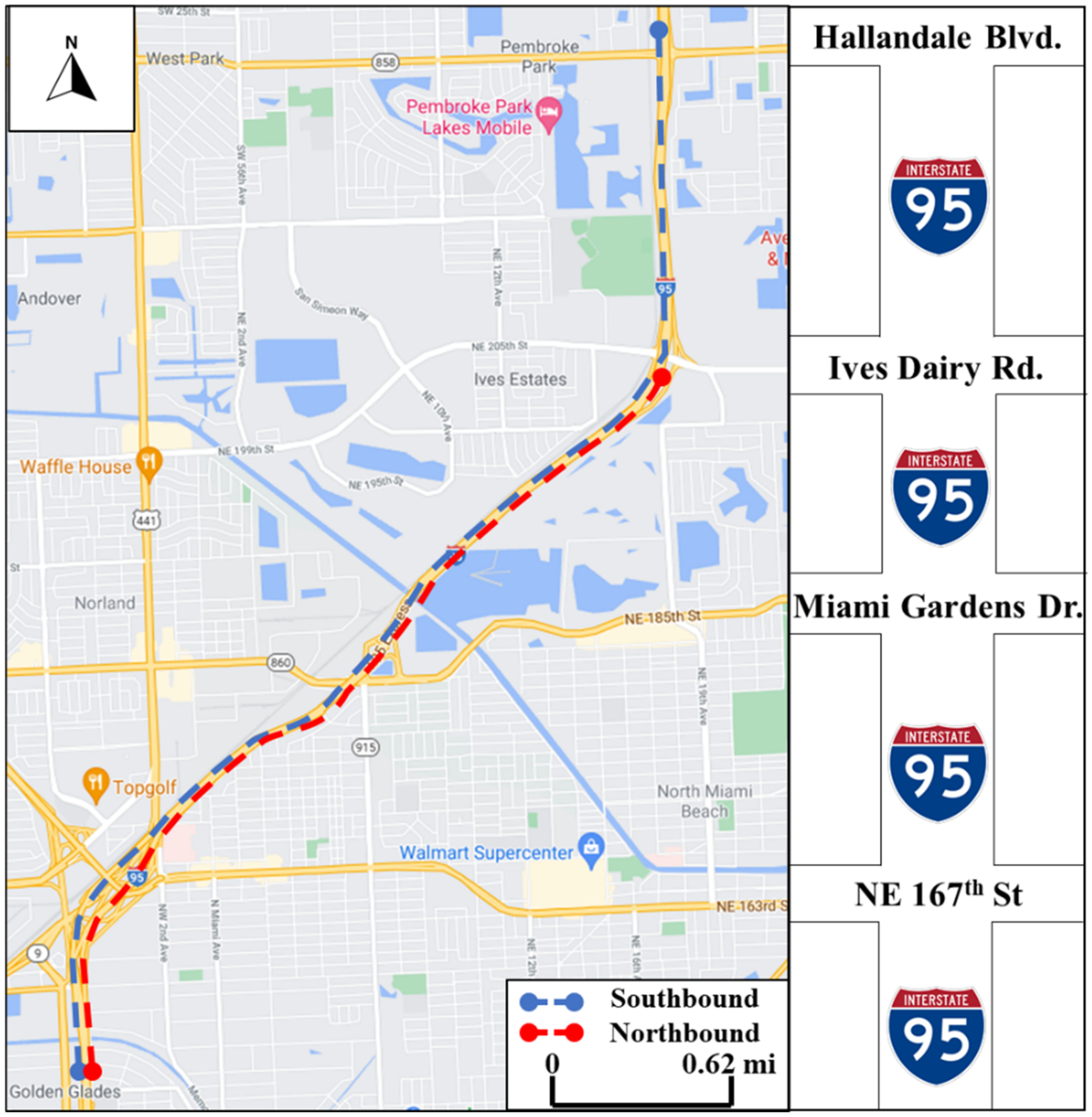
3.1. Study Site and Data Collection
3.1.1. Data Collection and Analysis
3.1.2. Study Area
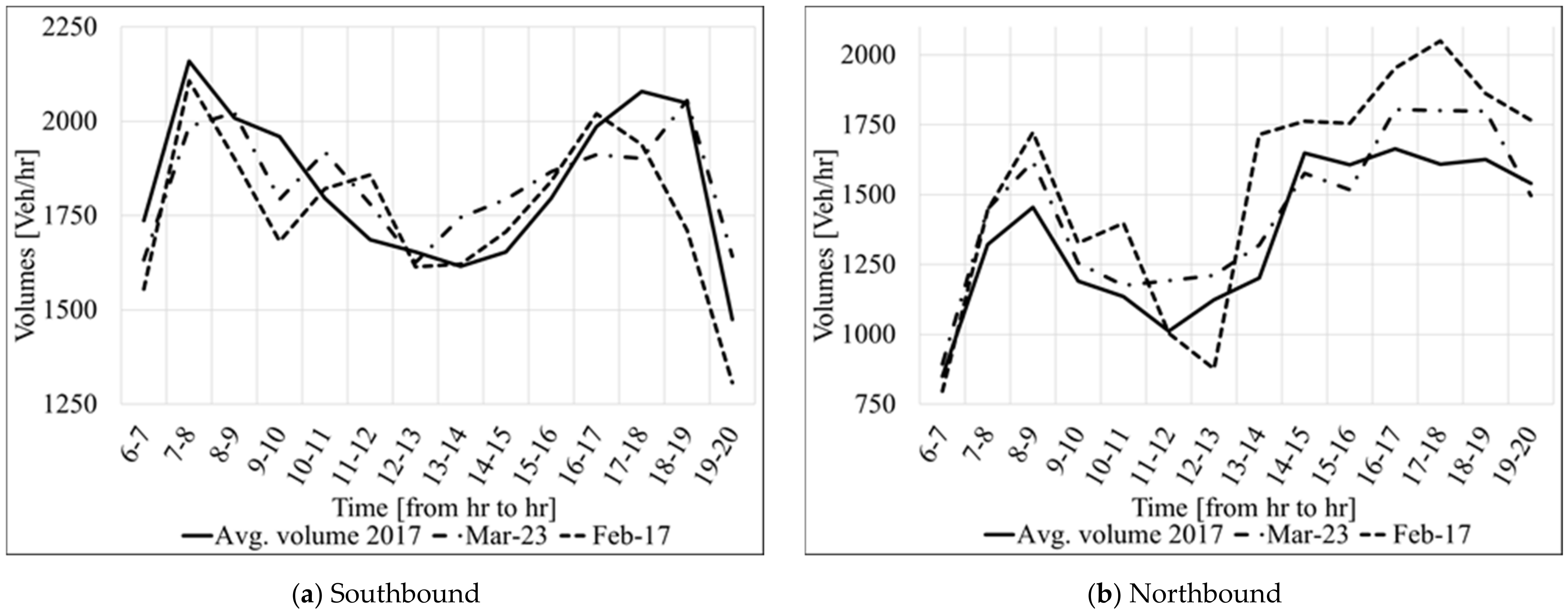
3.1.3. Selection of Representative Days
- The tolling operations were not closed during any portion of the investigated period;
- The tolls do not reach the maximum value allowed by the algorithm (to avoid oversaturation conditions that can impact the results of the conducted experiments);
- The tolls exhibit smooth and noticeable toll changing patterns (that will ensure testing the sensitivity of sensors at various traffic ‘demand’ densities);
- The toll operations use the maximum number of sensors for toll calculations;
- The representative days experienced a close-to-an-average traffic volume in 2017.
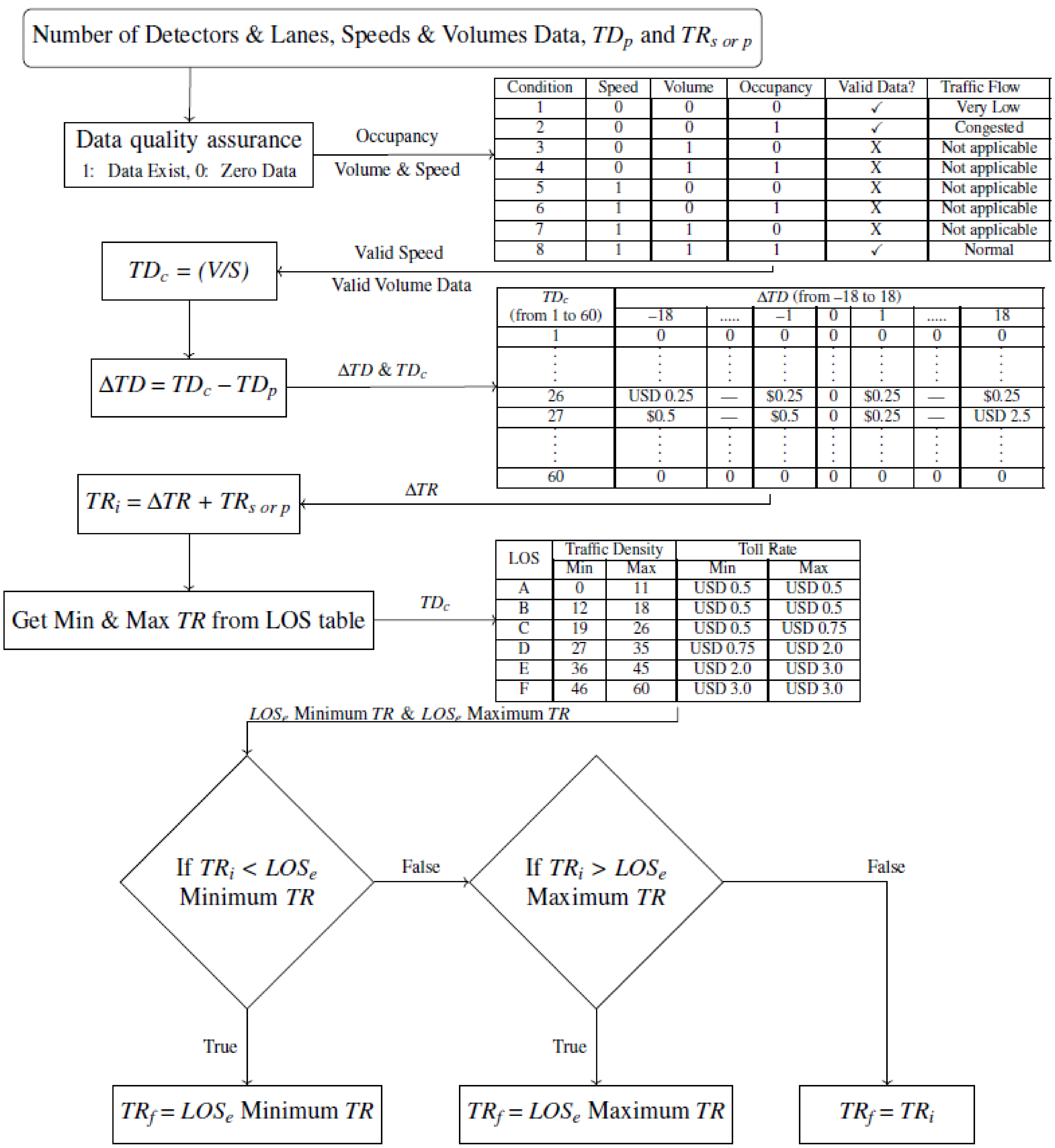
3.2. Pseudocode for Dynamic Toll Module
3.3. Scenarios for Modeling Detection Errors
- Scenario 1: Systematic detection errors—all sensors consistently generate erroneous readings with 5, 10, 15, or 20% error across the board. This scenario includes two subsets:
- Subset 1 consisted of a set of uniform detection errors for all of the sensors on the tested segment, of ± 5, ±10, ±15, and ±20% of the detection values observed in the field. For example, a +5% error in volume (with a corresponding error in speed and the resulting error in density) had been applied to all of the sensors on the studied segments by multiplying their observed field volumes with a factor of 1.05.
- Subset 2 consisted of a set of experiments where a certain percentage of sensors was considered to have failed completely (e.g., no reported traffic data), thus leaving the algorithm to rely only on the rest of the sensors (that have remained operational). Therefore, Subset 2 represents hypothetical field conditions when sensors either work or do not work—there is no error applied. However, various percentages of the available sensors were simulated to fail within the two analyzed EL segments.Table 2 lists all of the 25 experiments conducted under the Scenario 1 set, each with an associated percent of error or a percent of failed sensors. We note here that if 100% of sensors on a particular segment fail, it is assumed that the pre-designed tolls (from the day-of-week/time-of-day tables) are used.
- Scenario 2: Stochastic detection errors—the Monte Carlo simulation method was utilized to randomly introduce errors and failures of the sensors at the two ELs segments. All sensors within the studied segments had equal probabilities of falling into the group of failing sensors or their erroneous data. A custom stochastic model was developed to model the errors and failures throughout the analyzed ELs segments. The logic behind this approach was that some of the sensors could ultimately fail while others will either work with erroneous outputs or work properly. The objective was to investigate how such stochastically distributed detection errors and failures would impact the ELs toll calculations. Table 3 shows how stochastic experiments were selected and executed. The first column of Table 3 shows experiment ID, the second column shows the percentage of sensors set to fail in the corresponding experiment, the third column lists the sensors that were operational (with or without an error), the fourth column shows the level of error applied to (some of) the operational sensors, and the fifth column lists the operational sensors that were modeled with an error. The rest of the sensors in each experiment were assumed to be 100% functional and accurate.
3.4. Replication and Validation of the Toll Calculation Algorithm
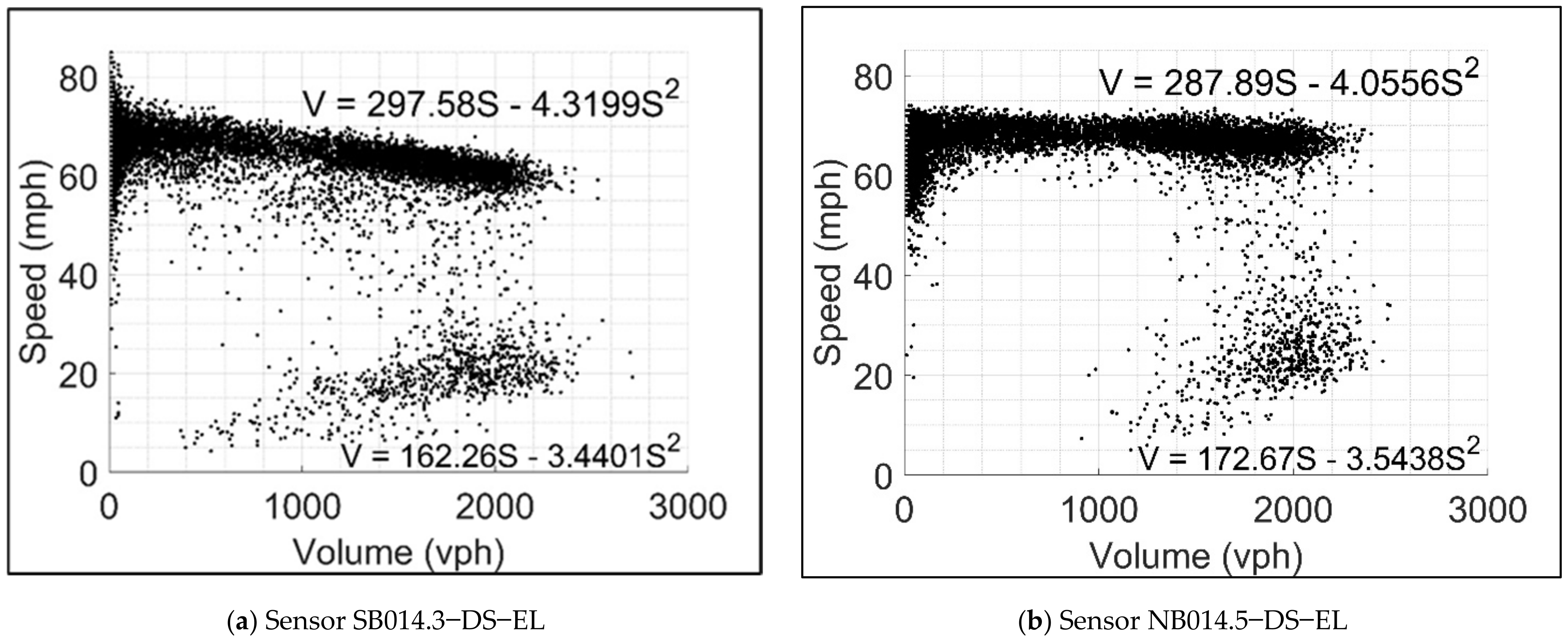
3.5. Modeling of Traffic Density in Evaluated Detection Scenarios
- Take the aggregated 15-min “true” volume and speed observations from the dataset, V1 and S1;
- Multiply V1 by percent of error—representing an erroneous reading (+/− Z%) to obtain V2;
- Insert V2 into the appropriate V-S relationship to obtain (the speed that corresponds to the adjusted volume, V2). A 40–50 mph speed range represents the queue discharge flow condition; thus, 45 mph is used as a threshold value to distinguish between undersaturated and oversaturated conditions.
- Calculate speed error percentage by using the following equation:
- Apply speed error F% on the true speed S1 to obtain S2;
- Use V2 and S2 to calculate 15-min traffic density (D):
3.6. Performance Measures to Evaluate the Impact of Detection Errors
- Mean absolute percentage error (MAPE), shown in Equation (7), was used to assess density variation in different scenarios. Equation (7) has three terms: TTD is true traffic density, which is the field-measured density, CTD is calculated traffic density after applying a percent of error to volume and speed readings, n is the number of 15-min intervals used in the calculation, and i is any 15-min interval.
- Absolute toll error (ABS) is important for observing the cumulative total absolute change in tolls for all 56 15-min intervals during the study period (6 a.m.–8 p.m.). Equation (8) shows how ABS is computed where true toll rate (TTR) represents the posted toll in the field, whereas calculated toll rate (CTR) is taken from the experiments, and i is any 15-min interval.
- Total gross toll: a sum of the products of volumes of the charged vehicles and their tolls for each of the 15-min intervals. The total gross toll represents the total toll fees calculated for each scenario during the analysis period (6 a.m.–8 p.m.). It is crucial to mention here that all the total gross toll values are theoretical and not actual. By using “i” for any 15-min interval during the analysis period, the following equation defines the total gross toll:where: TV is true volume, and CTR is calculated toll rate.
- Equation (10) computes the difference in total revenue between the true total gross toll charged in the field and the total gross toll calculated in the experiments with erroneous detection. This measure helps to see the impact of detection errors or failures on the total gross toll.where: TCR is total calculated revenue, TAR is total actual revenue, and i is any 15-min interval.
4. Results and Discussion
4.1. Analysis of the Southbound Segment
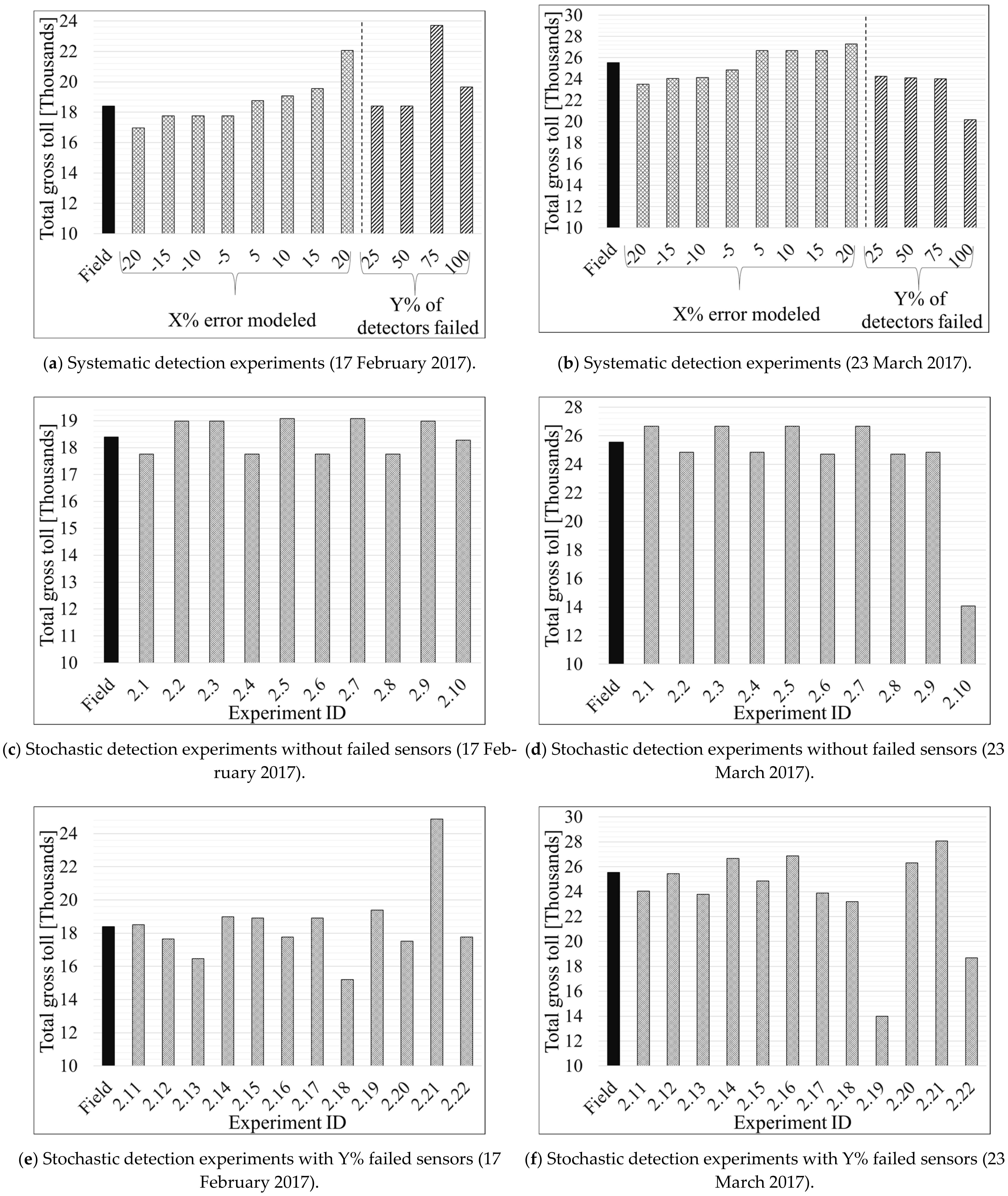
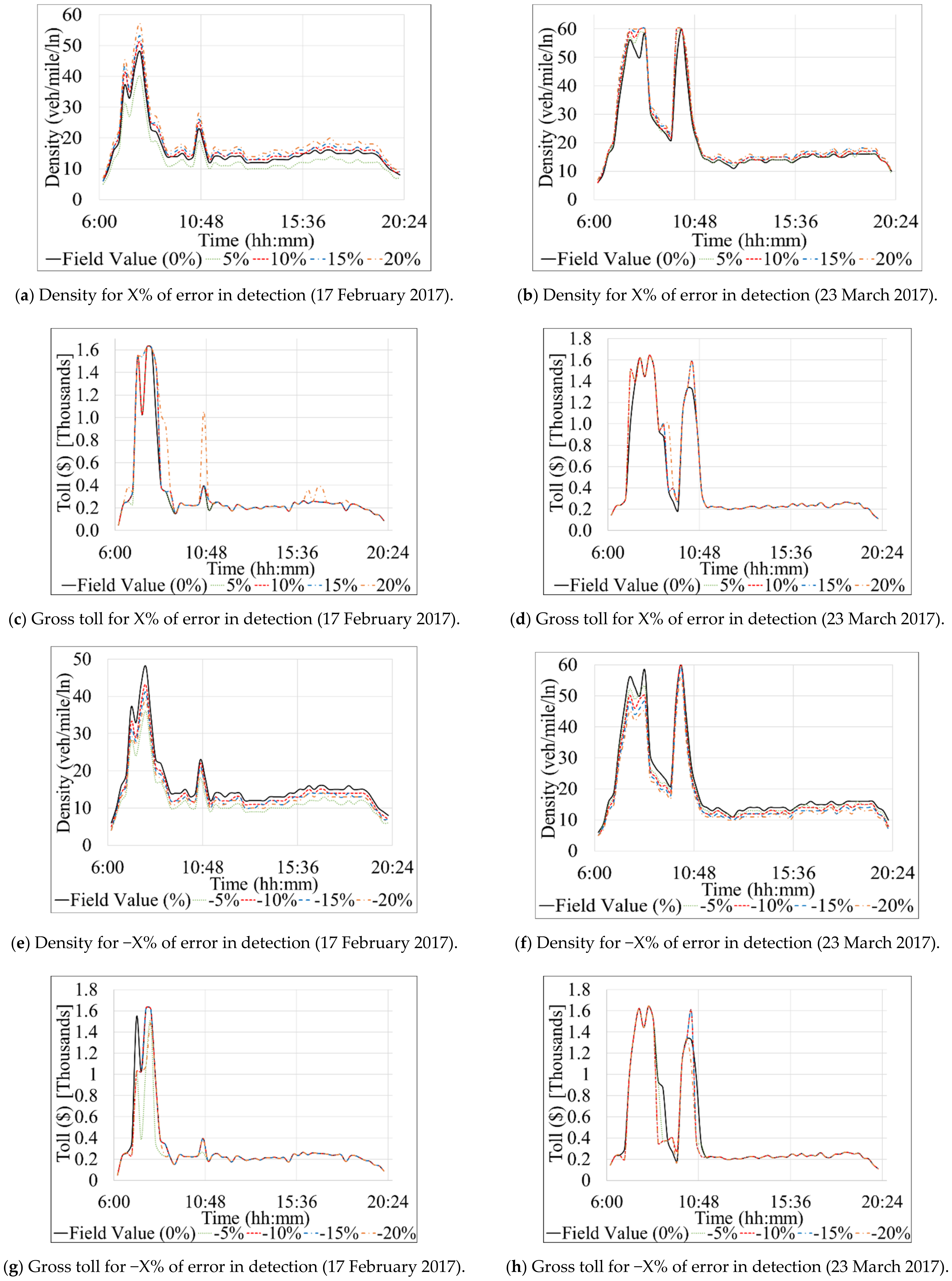
4.1.1. Scenario 1: Systematic Detection Errors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (A) Systematic Detection Experiments—Subset 1 | ||||||||
|---|---|---|---|---|---|---|---|---|
| Exp. ID | MAPE (Density) | Absolute 15-min Toll Error (USD) | Total Gross Toll (USD) | Profit/Loss (USD) | ||||
| 17 February | 23 March | 17 February | 23 March | 17 February | 23 March | 17 February | 23 March | |
| 1.1 | 0 | 0 | 0 | 0 | 18,394 | 25,548 | 0 | 0 |
| 1.2 | 5.85 | 4.79 | 1.25 | 2.25 | 18,752 | 26,667 | 358 | 1118 |
| 1.3 | 4.17 | 6.5 | 5.75 | 3.5 | 17,763 | 24,838 | 631 | 710 |
| 1.4 | 6.97 | 6.54 | 1.5 | 2.25 | 19,075 | 26,667 | 681 | 1118 |
| 1.5 | 9.05 | 10.2 | 1.25 | 5 | 17,763 | 24,135 | 631 | 1413 |
| 1.6 | 10.34 | 9.39 | 2.5 | 2.25 | 19,588 | 26,667 | 1194 | 1118 |
| 1.7 | 13.24 | 14.56 | 1.25 | 4.75 | 17,763 | 24,040 | 631 | 1507 |
| 1.8 | 19.44 | 12.04 | 7.5 | 3.5 | 22,061 | 27,297 | 3667 | 1748 |
| 1.9 | 18.89 | 18.89 | 4.75 | 4.75 | 16,972 | 23,297 | 1422 | 2035 |
| (B) Systematic Detection Experiments—Subset 2 | ||||||||
| 1.19 | 2.22 | 3.92 | 4.75 | 4.75 | 18,394 | 24,235 | 0 | 1312 |
| 1.20 | 2.22 | 3.92 | 0 | 5.00 | 18,394 | 24,120 | 0 | 1428 |
| 1.21 | 3.07 | 6.05 | 12.25 | 6.25 | 23,722 | 24,019 | 5328 | 1529 |
| 1.22 | 23.62 | 23.62 | 13.00 | 13.00 | 19,659 | 20,170 | 1266 | 5378 |

4.1.2. Scenario 2: Stochastic Detection Errors

| Exp. ID | MAPE (Density) | Abs 15-min Toll Error (USD) | Total Gross Toll (USD) | Profit/Loss (USD) | ||||
|---|---|---|---|---|---|---|---|---|
| 17 February | 23 March | 17 February | 23 March | 17 February | 23 March | 17 February | 23 March | |
| 2.1 | 18.99 | 3.48 | 15.75 | 2.25 | 17,763 | 26,667 | 631 | 1118 |
| 2.2 | 16.47 | 5.06 | 15.25 | 3.5 | 18,983 | 24,838 | 589 | 710 |
| 2.3 | 16.68 | 2.98 | 15.25 | 2.25 | 18,983 | 26,667 | 589 | 1118 |
| 2.4 | 18.42 | 5.52 | 15.75 | 3.5 | 17,763 | 24,838 | 631 | 710 |
| 2.5 | 16 | 4.52 | 15 | 2.25 | 19,075 | 26,667 | 681 | 1118 |
| 2.6 | 19.46 | 9.27 | 15.75 | 3.75 | 17,763 | 24,722 | 631 | 825 |
| 2.7 | 15.9 | 5.9 | 15 | 2.25 | 19.075 | 26,667 | 681 | 1118 |
| 2.8 | 20.89 | 8.78 | 15.75 | 3.75 | 17,763 | 24,722 | 631 | 825 |
| 2.9 | 16.56 | 5.59 | 15.25 | 3.5 | 18,983 | 24,838 | 589 | 710 |
| 2.10 | 18.05 | 71.28 | 16.75 | 4.5 | 18,276 | 24,092 | 118 | 1426 |
| 2.11 | 17.08 | 32.15 | 16.25 | 4.75 | 18,507 | 24,040 | 113 | 1507 |
| 2.12 | 20.57 | 7.01 | 16 | 4.25 | 17,648 | 25,439 | 746 | 109 |
| 2.13 | 24.76 | 14.65 | 18.25 | 4.75 | 16,472 | 23,780 | 1922 | 1768 |
| 2.14 | 17.79 | 8.98 | 15.25 | 2.25 | 18,983 | 26,667 | 589 | 1118 |
| 2.15 | 17.6 | 6.32 | 15.5 | 5.5 | 18,907 | 24,401 | 513 | 696 |
| 2.16 | 21.63 | 13.3 | 15.75 | 5.5 | 17,763 | 10,852 | 631 | 1655 |
| 2.17 | 17.82 | 21.07 | 15.5 | 4.75 | 18,907 | 23,893 | 513 | 1324 |
| 2.18 | 26.85 | 16.48 | 20.75 | 6 | 15,205 | 23,192 | 3189 | 2355 |
| 2.19 | 17.68 | 71.88 | 14.5 | 23.75 | 19,383 | 13,999 | 989 | 11,549 |
| 2.20 | 21.74 | 7.19 | 16.25 | 4.5 | 17,520 | 26,323 | 874 | 775 |
| 2.21 | 20.32 | 11.52 | 13.25 | 5.5 | 24,866 | 28,056 | 6473 | 2507 |
| 2.22 | 21.63 | 56.08 | 15.75 | 14 | 17,763 | 18,682 | 631 | 6866 |
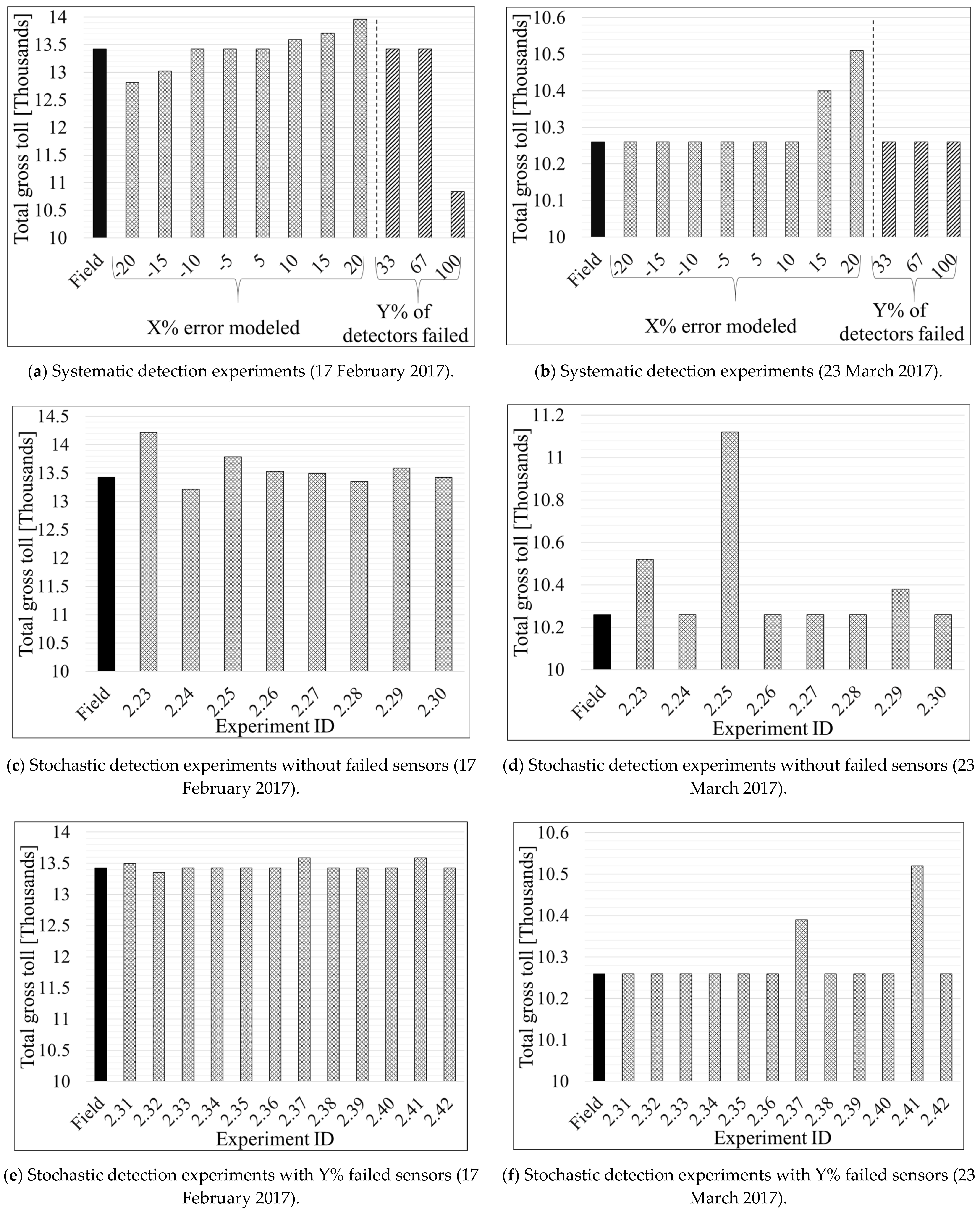
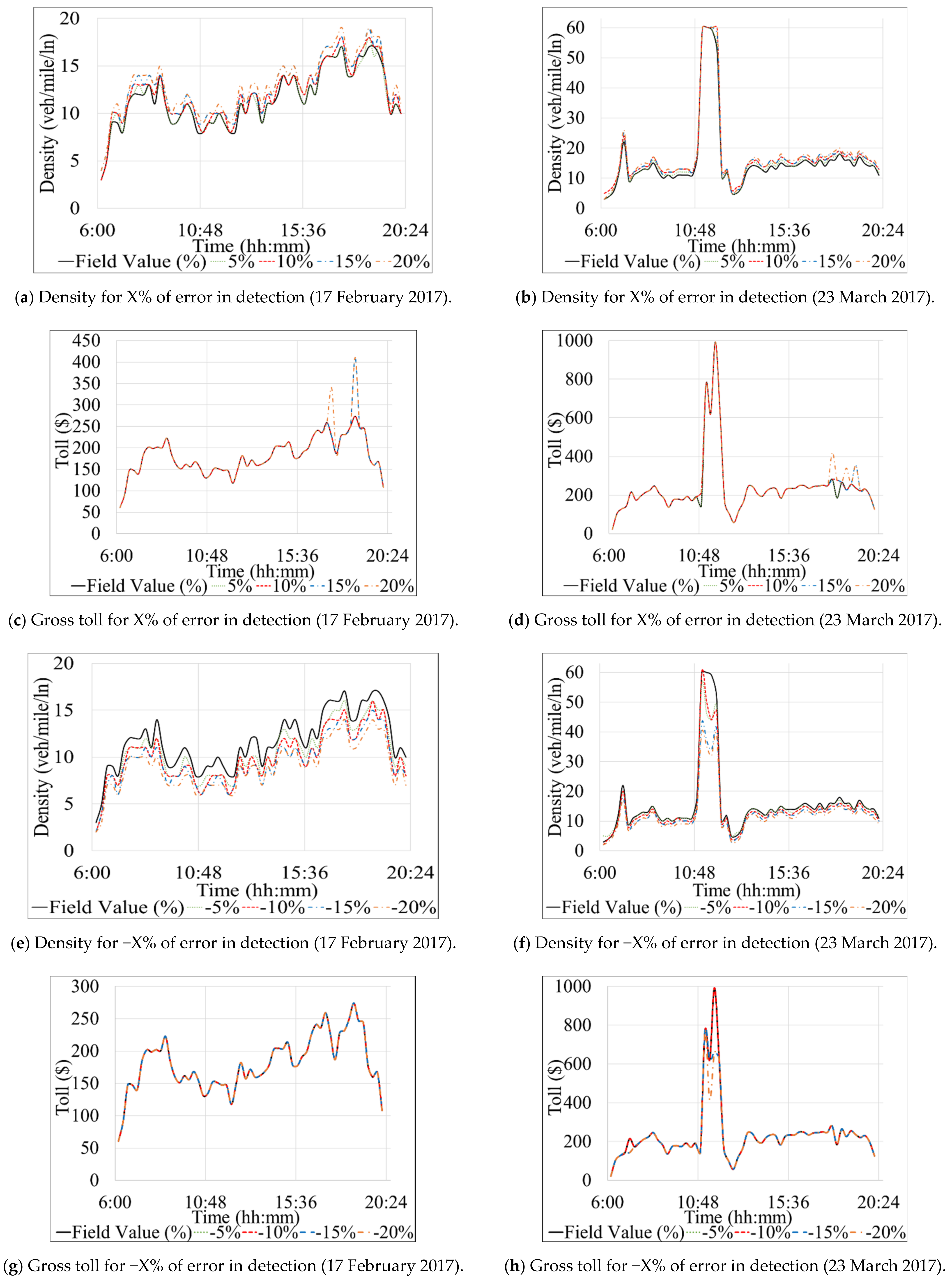
4.2. Analysis of the Northbound Segment
4.2.1. Scenario 1: Systematic Detection Errors
| (A) Systematic Detection Experiments—Subset 1 | ||||||||
|---|---|---|---|---|---|---|---|---|
| Exp. ID | MAPE (Density) | Absolute 15-min Toll Error (USD) | Total Gross Toll (USD) | Profit/Loss (USD) | ||||
| 17 February | 23 March | 17 February | 23 March | 17 February | 23 March | 17 February | 23 March | |
| 1.10 | 0 | 0 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 1.11 | 4.24 | 10.8 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 1.12 | 4.79 | 10.22 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 1.13 | 13.94 | 4.67 | 0.5 | 0 | 13,590 | 10,264 | 165 | 0 |
| 1.14 | 9.18 | 14.79 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 1.15 | 11.33 | 9.05 | 0.75 | 0.25 | 13,708 | 10,401 | 283 | 137 |
| 1.16 | 16.13 | 18.65 | 1.25 | 0 | 13,023 | 10,264 | 403 | 0 |
| 1.17 | 14.45 | 12.31 | 1.25 | 0.5 | 13,961 | 10,514 | 536 | 250 |
| 1.18 | 20.31 | 23.13 | 2.25 | 0 | 12,816 | 10,264 | 609 | 0 |
| (B) Systematic Detection Experiments—Subset 2 | ||||||||
| 1.23 | 0.48 | 1.48 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 1.24 | 1.48 | 1.67 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 1.25 | 14.14 | 14.14 | 0 | 0 | 10,844 | 10,264 | 2581 | 0 |
| Level of Service | Traffic Density [Veh/Mile/ln] | Toll Amount (USD) | ||
|---|---|---|---|---|
| Minimum | Maximum | Minimum | Maximum | |
| A | 0 | 11 | USD 0.50 | USD 0.50 |
| B | 12 | 18 | USD 0.50 | USD 0.50 |
| C | 19 | 26 | USD 0.50 | USD 0.75 |
| D | 27 | 35 | USD 0.75 | USD 2.00 |
| E | 36 | 45 | USD 2.00 | USD 3.00 |
| F | 46 | 60 | USD 3.00 | USD 3.00 |


4.2.2. Scenario 2: Stochastic Detection Errors
| Exp. ID | MAPE (Density) | Abs 15-min Toll Error (USD) | Total Gross Toll (USD) | Profit/Loss (USD) | ||||
|---|---|---|---|---|---|---|---|---|
| 17 February | 23 March | 17 February | 23 March | 17 February | 23 March | 17 February | 23 March | |
| 2.23 | 1.1 | 20.23 | 2.75 | 0.5 | 14,216 | 10,524 | 791 | 260 |
| 2.24 | 1.25 | 23.35 | 1 | 0 | 13,216 | 10,264 | 209 | 0 |
| 2.25 | 0.32 | 24.04 | 1.25 | 1.75 | 13,784 | 11,118 | 359 | 854 |
| 2.26 | 95.37 | 95.25 | 0.25 | 0 | 13,534 | 10,264 | 72 | 0 |
| 2.27 | 0.63 | 9.99 | 0.25 | 0 | 13,497 | 10,264 | 72 | 0 |
| 2.28 | 0.16 | 9.52 | 0.25 | 0 | 13,354 | 10,264 | 72 | 0 |
| 2.29 | 0.39 | 13.25 | 0.5 | 0.25 | 13,590 | 10,377 | 164 | 113 |
| 2.30 | 0.16 | 11.15 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 2.31 | 0.19 | 18.03 | 0.25 | 0 | 13.497 | 10,264 | 72 | 0 |
| 2.32 | 0.32 | 18.03 | 0.25 | 0 | 13,353 | 10,264 | 72 | 0 |
| 2.33 | 0.24 | 11.15 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 2.34 | 0.49 | 10.74 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 2.35 | 0.65 | 12.32 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 2.36 | 0.37 | 12.32 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 2.37 | 0.39 | 14.63 | 0.5 | 0.25 | 13,590 | 10,389 | 164 | 124 |
| 2.38 | 0.29 | 13.75 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 2.39 | 0.53 | 10.74 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 2.40 | 0.23 | 10.74 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
| 2.41 | 0.39 | 21.94 | 0.5 | 0.5 | 13,590 | 10,524 | 164 | 260 |
| 2.42 | 0.38 | 20.29 | 0 | 0 | 13,425 | 10,264 | 0 | 0 |
5. Conclusions
- Uniformly applied detection errors (±5, 10, 15, and 20%) for all of the sensors on the Southbound segment show consistent results—underestimated traffic volumes result in a loss of the gross tolls. In contrast, the overestimated volumes result in a surplus of the tolls.
- Uniformly applied detection errors (±5, 10, 15, and 20%) for all of the sensors on the Northbound segment show that change in total gross toll occurs when the volume is overestimated by more than 15% for a day with an average traffic volume. In contrast, the detection error as low as 10% caused changes in toll amounts for a day with high traffic volumes.
- Considering the demonstrated cases in which detection errors of 5–10% did not trigger any changes in the tolls in the Northbound direction, the authorities could require that the accuracy of their detection systems cannot be lower than 90%.
- Experiments with multiple failed/erroneous sensors lead to results that are not easy to interpret systematically. In these experiments, the results vary between losses and gains based on the percentages of failed sensors and the magnitude of introduced errors on each sensor. The unpredictability of the resulting tolls appears to be more significant on the Southbound segment because it is more dynamic, traffic-wise, than the Northbound segment.
- In summary, the findings show that the detection errors greater than 10% should present a concern for the toll authorities in terms of possible underestimates or overestimates of reported traffic volumes, which reduce the algorithm’s effectiveness in determining the appropriate toll rates.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Disclaimer
References
- Al Shayeb, S.; Dobrota, N.; Stevanovic, A.; Mitrovic, N. Assessment of Arterial Signal Timings Based on Various Operational Policies and Optimization Tools. Transp. Res. Rec. 2021, 03611981211011165. [Google Scholar] [CrossRef]
- Evans, A.W. Road congestion pricing: When is it a good policy? J. Transp. Econ. Policy 1992, 26, 213–243. [Google Scholar]
- Florida Department of Transportation. Express Lanes Handbook. 2015. Available online: https://www.scribd.com/document/492483848/FDOT-Express-Lanes-Handbook (accessed on 3 September 2021).
- Phan, T.; Annaswamy, A.M.; Yanakiev, D.; Tseng, E. A model-based dynamic toll pricing strategy for controlling highway traffic. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 6245–6252. [Google Scholar]
- Perez, B.G.; Fuhs, C.; Gants, C.; Giordano, R.; Ungemah, D.H.; Berman, W. Priced Managed Lane Guide; Report No. FHWA-HOP-13-007; Federal Highway Administration: Washington, DC, USA, 2012.
- Sullivan, E.C.; Harake, J.E. California route 91 toll lanes impacts and other observations. Transp. Res. Rec. 1998, 1649, 55–62. [Google Scholar] [CrossRef]
- Lanes, E.H. High-Occupancy/Toll (HOT) Lanes and value pricing: A preliminary assessment. ITE J. 1998, 31. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.417.2312&rep=rep1&type=pdf (accessed on 3 September 2021).
- Burris, M.; Sullivan, E. Benefit-Cost Analysis of Variable Pricing Projects: QuickRide HOT Lanes. J. Transp. Eng. 2006, 132, 183–190. [Google Scholar] [CrossRef][Green Version]
- Appiah, J.; Burris, M.W. QuickRide user response to different HOT lane operating scenarios. In Proceedings of the 84th annual meeting of the Transportation Research Board, Washington, DC, USA, 9–13 January 2005; pp. 9–13. [Google Scholar]
- Halvorson, R.; Buckeye, K.R. High-Occupancy Toll Lane Innovations: I-394 MnPASS. Public Work. Manag. Policy 2006, 10, 242–255. [Google Scholar] [CrossRef]
- Chaudhuri, P.; Stevanovic, A.; Martin, P.T. Assessing the accuracy and reliability of freeway traffic monitoring stations using GPS probe vehicle speed data. World Rev. Intermodal Transp. Res. 2011, 3, 338. [Google Scholar] [CrossRef]
- Fujito, I.; Margiotta, R.; Huang, W.; Perez, W.A. Effect of sensor spacing on performance measure calculations. Transp. Res. Rec. 2006, 1945, 1–11. [Google Scholar] [CrossRef]
- Kwon, J.; Petty, K.; Varaiya, P. Probe vehicle runs or loop detectors? Effect of detector spacing and sample size on accuracy of freeway congestion monitoring. Transp. Res. Rec. 2007, 2012, 57–63. [Google Scholar] [CrossRef]
- Chen, L.; May, A.D. Traffic Detector Errors and Diagnostics; Transportation Research Board: Washington, DC, USA, 1987. [Google Scholar]
- NordFOU. Analysis of Measured Data for the Calculation of Accuracy in Vehicle Classification and Various Measurement Data. 2012. Available online: http://www.nordfou.org/knowledge/Sider/default.aspx (accessed on 3 September 2021).
- Pigou, A.C. The Economics of Welfare; Macmillan: New York, NY, USA, 1920. [Google Scholar]
- Seik, F.T. An advanced demand management instrument in urban transport: Electronic road pricing in Singapore. Cities 2000, 17, 33–45. [Google Scholar] [CrossRef]
- Lombardi, C.; Picado-Santos, L.; Annaswamy, A. Model-Based Dynamic Toll Pricing: An Overview. Appl. Sci. 2021, 11, 4778. [Google Scholar] [CrossRef]
- Managed Lanes Project Database. Available online: https://managedlanes.wordpress.com/category/projects (accessed on 27 August 2021).
- Figueiras, P.; Gonçalves, D.; Costa, R.; Guerreiro, G.; Georgakis, P.; Jardim-Gonçalves, R. Novel Big Data-supported dynamic toll charging system: Impact assessment on Portugal’s shadow-toll highways. Comput. Ind. Eng. 2019, 135, 476–491. [Google Scholar] [CrossRef]
- Shirazi, M.; Aashtiani, H.Z.; Quadrifoglio, L. Estimating the minimal revenue tolls in large-scale roadway networks using the dynamic penalty function method. Comput. Ind. Eng. 2017, 107, 120–127. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Q.; Chen, W. Bi-level programming model of truck congestion pricing at container terminals. J. Ambient. Intell. Humaniz. Comput. 2019, 10, 385–394. [Google Scholar] [CrossRef]
- Yin, Y.; Lou, Y. Dynamic Tolling Strategies for Managed Lanes. J. Transp. Eng. 2009, 135, 45–52. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, Y.; Wei, H.; Yi, P. A Feedback-Based Dynamic Tolling Algorithm for High-Occupancy Toll Lane Operations. Transp. Res. Rec. 2008, 2065, 54–63. [Google Scholar] [CrossRef]
- Sheu, J.-B.; Yang, H. An integrated toll and ramp control methodology for dynamic freeway congestion management. Phys. A Stat. Mech. Appl. 2008, 387, 4327–4348. [Google Scholar] [CrossRef]
- Ban, X.J.; Liu, H.X. A Link-Node Discrete-Time Dynamic Second Best Toll Pricing Model with a Relaxation Solution Algorithm. Netw. Spat. Econ. 2009, 9, 243–267. [Google Scholar] [CrossRef]
- Aboudina, A.; Abdelgawad, H.; Abdulhai, B.; Habib, K.N. Time-dependent congestion pricing system for large networks: Integrating departure time choice, dynamic traffic assignment and regional travel surveys in the Greater Toronto Area. Transp. Res. Part A Policy Pract. 2016, 94, 411–430. [Google Scholar] [CrossRef]
- Aboudina, A.; Abdulhai, B. A bi-level distributed approach for optimizing time-dependent congestion pricing in large networks: A simulation-based case study in the Greater Toronto Area. Transp. Res. Part C Emerg. Technol. 2017, 85, 684–710. [Google Scholar] [CrossRef]
- Lou, Y.; Yin, Y.; Laval, J.A. Optimal dynamic pricing strategies for high-occupancy/toll lanes. Transp. Res. Part C Emerg. Technol. 2011, 19, 64–74. [Google Scholar] [CrossRef]
- Zhang, G.; Ma, X.; Wang, Y. Self-Adaptive Tolling Strategy for Enhanced High-Occupancy Toll Lane Operations. IEEE Trans. Intell. Transp. Syst. 2014, 15, 306–317. [Google Scholar] [CrossRef]
- Jin, W.-L.; Wang, X.; Lou, Y. Stable dynamic pricing scheme independent of lane-choice models for high-occupancy-toll lanes. Transp. Res. Part B Methodol. 2020, 140, 64–78. [Google Scholar] [CrossRef]
- Do Chung, B.; Yao, T.; Friesz, T.L.; Liu, H. Dynamic congestion pricing with demand uncertainty: A robust optimization approach. Transp. Res. Part B Methodol. 2012, 46, 1504–1518. [Google Scholar] [CrossRef]
- Yang, H.; Xu, W.; He, B.-S.; Meng, Q. Road pricing for congestion control with unknown demand and cost functions. Transp. Res. Part C Emerg. Technol. 2010, 18, 157–175. [Google Scholar] [CrossRef]
- Zou, G.; Alvaro, G.; Kulkarni, R. Dynamic Pricing Algorithm with Embedded Controller for High Occupancy Toll Lanes. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 2384–2389. [Google Scholar]
- AlKheder, S.; Al-Rashidi, A. Congestion pricing with Genetic Algorithm for delay reduction on urban road network. Int. J. Urban Sci. 2021, 25, 178–192. [Google Scholar] [CrossRef]
- Cheng, Q.; Chen, J.; Zhang, H.; Liu, Z. Optimal Congestion Pricing with Day-to-Day Evolutionary Flow Dynamics: A Mean–Variance Optimization Approach. Sustainability 2021, 13, 4931. [Google Scholar] [CrossRef]
- Liu, Z.; Meng, Q.; Wang, S. Speed-based toll design for cordon-based congestion pricing scheme. Transp. Res. Part C Emerg. Technol. 2013, 31, 83–98. [Google Scholar] [CrossRef]
- Zhong, S.; Gong, Y.; Zhou, Z.; Cheng, R.; Xiao, F. Active learning for multi-objective optimal road congestion pricing considering negative land use effect. Transp. Res. Part C Emerg. Technol. 2021, 125, 103002. [Google Scholar] [CrossRef]
- Zheng, N.; Waraich, R.A.; Axhausen, K.W.; Geroliminis, N. A dynamic cordon pricing scheme combining the Macroscopic Fundamental Diagram and an agent-based traffic model. Transp. Res. Part A Policy Pract. 2012, 46, 1291–1303. [Google Scholar] [CrossRef]
- Yang, L.; Saigal, R.; Zhou, H. Distance-Based Dynamic Pricing Strategy for Managed Toll Lanes. Transp. Res. Rec. J. Transp. Res. Board 2012, 2283, 90–99. [Google Scholar] [CrossRef]
- Zheng, N.; Rérat, G.; Geroliminis, N. Time-dependent area-based pricing for multimodal systems with heterogeneous users in an agent-based environment. Transp. Res. Part C Emerg. Technol. 2016, 62, 133–148. [Google Scholar] [CrossRef]
- Gu, Z.; Shafiei, S.; Liu, Z.; Saberi, M. Optimal distance- and time-dependent area-based pricing with the Network Fundamental Diagram. Transp. Res. Part C Emerg. Technol. 2018, 95, 1–28. [Google Scholar] [CrossRef]
- Wei, B.; Sun, D. A Two-Layer Network Dynamic Congestion Pricing Based on Macroscopic Fundamental Diagram. J. Adv. Transp. 2018, 2018, 1–11. [Google Scholar] [CrossRef]
- Hassan, A.; Abdelghany, K.; Semple, J. Dynamic road pricing for revenue maximization: Modeling framework and solution methodology. Transp. Res. Rec. 2013, 2345, 100–108. [Google Scholar] [CrossRef]
- Cheng, D.; Ishak, S. Maximizing toll revenue and level of service on managed lanes with a dynamic feedback-control toll pricing strategy. Can. J. Civ. Eng. 2016, 43, 18–27. [Google Scholar] [CrossRef]
- Lou, Y. A unified framework of proactive self-learning dynamic pricing for high-occupancy/toll lanes. Transp. A Transp. Sci. 2013, 9, 205–222. [Google Scholar] [CrossRef]
- Friesz, T.L.; Han, K.; Liu, H.; Yao, T. Dynamic Congestion and Tolls with Mobile Source Emission. Procedia-Soc. Behav. Sci. 2013, 80, 818–836. [Google Scholar] [CrossRef][Green Version]
- Jang, K.; Song, M.K.; Choi, K.; Kim, D.-K. A bi-level framework for pricing of high-occupancy toll lanes. Transport 2014, 29, 317–325. [Google Scholar] [CrossRef][Green Version]
- Rambha, T.; Boyles, S.D. Dynamic pricing in discrete time stochastic day-to-day route choice models. Transp. Res. Part B Methodol. 2016, 92, 104–118. [Google Scholar] [CrossRef]
- Jang, K.; Chung, K.; Yeo, H. A dynamic pricing strategy for high occupancy toll lanes. Transp. Res. Part A Policy Pract. 2014, 67, 69–80. [Google Scholar] [CrossRef]
- Laval, J.A.; Cho, H.W.; Muñoz, J.C.; Yin, Y. Real-time congestion pricing strategies for toll facilities. Transp. Res. Part B Methodol. 2015, 71, 19–31. [Google Scholar] [CrossRef]
- Zhang, Y.; Atasoy, B.; Akkinepally, A.; Ben-Akiva, M. Dynamic Toll Pricing using Dynamic Traffic Assignment System with Online Calibration. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 532–546. [Google Scholar] [CrossRef]
- Michalaka, D.; Yin, Y.; Hale, D. Simulating High-Occupancy Toll Lane Operations. Transp. Res. Rec. J. Transp. Res. Board 2013, 2396, 124–132. [Google Scholar] [CrossRef]
- He, B.Y.; Zhou, J.; Ma, Z.; Wang, D.; Sha, D.; Lee, M.; Chow, J.Y.; Ozbay, K. A validated multi-agent simulation test bed to evaluate congestion pricing policies on population segments by time-of-day in New York City. Transp. Policy 2021, 101, 145–161. [Google Scholar] [CrossRef]
- Pandey, V.; Boyles, S.D. Dynamic pricing for managed lanes with multiple entrances and exits. Transp. Res. Part C Emerg. Technol. 2018, 96, 304–320. [Google Scholar] [CrossRef]
- Pandey, V.; Boyles, S.D. Multiagent Reinforcement Learning Algorithm for Distributed Dynamic Pricing of Managed Lanes. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2346–2351. [Google Scholar]
- Toledo, T.; Mansour, O.; Haddad, J. Simulation-based Optimization of HOT Lane Tolls. Transp. Res. Procedia 2015, 6, 189–197. [Google Scholar] [CrossRef]
- He, X.; Chen, X.; Xiong, C.; Zhu, Z.; Zhang, L. Optimal Time-Varying Pricing for Toll Roads Under Multiple Objectives: A Simulation-Based Optimization Approach. Transp. Sci. 2017, 51, 412–426. [Google Scholar] [CrossRef]
- Gu, Z.; Saberi, M. Simulation-based optimization of toll pricing in large-scale urban networks using the network fundamental diagram: A cross-comparison of methods. Transp. Res. Part C Emerg. Technol. 2021, 122, 102894. [Google Scholar] [CrossRef]
- Gardner, L.M.; Bar-Gera, H.; Boyles, S.D. Development and comparison of choice models and tolling schemes for high-occupancy/toll (HOT) facilities. Transp. Res. Part B Methodol. 2013, 55, 142–153. [Google Scholar] [CrossRef]
- Xiao, F.; Zhang, H.M. Pareto-Improving and Self-Sustainable Pricing for the Morning Commute with Nonidentical Commuters. Transp. Sci. 2014, 48, 159–169. [Google Scholar] [CrossRef]
- Tan, Z.; Yang, H.; Guo, R.-Y. Dynamic congestion pricing with day-to-day flow evolution and user heterogeneity. Transp. Res. Part C Emerg. Technol. 2015, 61, 87–105. [Google Scholar] [CrossRef]
- Meng, Q.; Liu, Z.; Wang, S. Optimal distance tolls under congestion pricing and continuously distributed value of time. Transp. Res. Part E Logist. Transp. Rev. 2012, 48, 937–957. [Google Scholar] [CrossRef]
- Fakhrmoosavi, F.; Zockaie, A.; Abdelghany, K. Incorporating Travel Time Reliability in Equitable Congestion Pricing Schemes for Heterogeneous Users and Bimodal Networks. Transp. Res. Rec. J. Transp. Res. Board 2021. [Google Scholar] [CrossRef]
- Zheng, N.; Geroliminis, N. Area-based equitable pricing strategies for multimodal urban networks with heterogeneous users. Transp. Res. Part A Policy Pract. 2020, 136, 357–374. [Google Scholar] [CrossRef]
- Cheng, D.; Li, W.; Ishak, S. Accounting for travel time reliability and trip purpose in an agent-based approach to toll pricing with dynamic feedback control: Case study on I-95 managed-lanes corridor. Transp. Res. Rec. 2014, 2470, 131–141. [Google Scholar] [CrossRef]
- Cheng, Q.; Liu, Z.; Szeto, W.Y. A cell-based dynamic congestion pricing scheme considering travel distance and time delay. Transp. B Transp. Dyn. 2019, 7, 1286–1304. [Google Scholar] [CrossRef]
- Chen, Y.; Zheng, N.; Vu, H.L. A novel urban congestion pricing scheme considering travel cost perception and level of service. Transp. Res. Part C Emerg. Technol. 2021, 125, 103042. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, Z. Information provision and congestion pricing in a risky two-route network with heterogeneous travelers. Transp. Res. Part C Emerg. Technol. 2021, 128, 103083. [Google Scholar] [CrossRef]
- Yang, K.; Menendez, M.; Zheng, N. Heterogeneity aware urban traffic control in a connected vehicle environment: A joint framework for congestion pricing and perimeter control. Transp. Res. Part C Emerg. Technol. 2019, 105, 439–455. [Google Scholar] [CrossRef]
- Pandey, V.; Wang, E.; Boyles, S.D. Deep reinforcement learning algorithm for dynamic pricing of express lanes with multiple access locations. Transp. Res. Part C Emerg. Technol. 2020, 119, 102715. [Google Scholar] [CrossRef]
- Sato, K.; Seo, T.; Fuse, T. A reinforcement learning-based dynamic congestion pricing method for the morning commute problems. Transp. Res. Procedia 2021, 52, 347–355. [Google Scholar] [CrossRef]
- Genser, A.; Kouvelas, A. Dynamic optimal congestion pricing in multi-region urban networks by application of a Multi-Layer-Neural network. arXiv 2021, arXiv:2107.14585. [Google Scholar]
- Gajewski, B.J.; Turner, S.M.; Eisele, W.L.; Spiegelman, C.H. Intelligent Transportation System Data Archiving: Statistical Techniques for Determining Optimal Aggregation Widths for Inductive Loop Detector Speed Data. Transp. Res. Rec. J. Transp. Res. Board 2000, 1719, 85–93. [Google Scholar] [CrossRef]
- Oh, C.; Ritchie, S.G.; Oh, J.S. Exploring the relationship between data aggregation and predictability to provide better predictive traffic information. Transp. Res. Rec. 2005, 1935, 28–36. [Google Scholar] [CrossRef]
- Park, D.; You, S.; Rho, J.; Cho, H.; Lee, K. Investigating optimal aggregation interval sizes of loop detector data for freeway travel-time estimation and prediction. Can. J. Civ. Eng. 2009, 36, 580–591. [Google Scholar] [CrossRef]
- Vlahogianni, E.; Karlaftis, M. Temporal aggregation in traffic data: Implications for statistical characteristics and model choice. Transp. Lett. 2011, 3, 37–49. [Google Scholar] [CrossRef]
- Son, S.; Cetin, M.; Khattak, A. Exploring Bias in Traffic Data Aggregation Resulting from Transition of Traffic States. Transp. Res. Rec. J. Transp. Res. Board 2014, 2443, 78–87. [Google Scholar] [CrossRef]
- Hourdos, J.; Janson, M.; Levinson, D.; Parikh, G. MnPASS Modeling and Pricing Algorithm Enhancement; Center for Transportation Studies, University of Minnesota: Twins, MN, USA, 2015. [Google Scholar]
- Texpresslanes.com. How Pricing Is Determined|TEXpress Lanes. 2018. Available online: http://www.texpresslanes.com/pricing/how-pricing (accessed on 23 December 2020).
- Mimbela, L.E.; Klein, L.A. Summary of Vehicle Detection and Surveillance Technologies Used in Intelligent Transportation Systems; Joint Program Office for Intelligent Transportation Systems: Washington, DC, USA, 2007.
- El-Geneidy, A.M.; Bertini, R.L. Toward validation of freeway loop detector speed measurements using transit probe data. In Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems (IEEE Cat. No. 04TH8749), Washington, DC, USA, 3 October 2004; pp. 779–784. [Google Scholar]
- Tong, D.; Merry, C.J.; Coifman, B. Traffic Information Deriving Using GPS Probe Vehicle Data Integrated with GIS. Master’s Thesis, Center for Urban and Regional Analysis and Department of Geography, The Ohio State University, Columbus, OH, USA, 2005. [Google Scholar]
- Bar-Gera, H. Evaluation of a cellular phone-based system for measurements of traffic speeds and travel times: A case study from Israel. Transp. Res. Part C Emerg. Technol. 2007, 15, 380–391. [Google Scholar] [CrossRef]
- Fdot. Its Cei Training: Microwave Vehicle Detection System (MVDS). Available online: http://wbt.dot.state.fl.us/ois/ITS-MVDS/docs/ITS-MVDS-Module1-Transcript.pdf (accessed on 23 December 2020).
- LBJ Development Partners. IH 635 Managed Lanes Project Appendix D.4: Draft Tolling Plan January. Appendix D.4: Draft Tolling Plan. 2009. Available online: https://ftp.txdot.gov/pub/txdot-info/dal/lbj_635/lbj_development_partners/tech_proposal_managed/Technical%20Proposal%20V4%20-%20Appendices/D.4-Tolling%20Plan/LBJ%20DRAFT%20TOLLING%20PLAN-vFINAL.pdf (accessed on 3 September 2021).
- Floridaexpresslanes.com. Southeast Florida EXPRESS LANES. 2018. Available online: http://floridaexpresslanes.com/wp-content/uploads/2017/04/FINAL_SouthFla_RCTO_Report_07_18_2014_v2.pdf (accessed on 23 December 2020).





| Variable | Description |
|---|---|
| TD | Traffic link density (veh/mile/ln) |
| FTL | Traffic link flow (vehicles per hour) |
| STL | Traffic link speed (miles per hour) |
| NL | Number of lanes |
| VTLC | Traffic link volume count (vehicles per data collection interval) |
| DCI | Data collection interval (900 s = 15 min) |
| Si | Average of one vehicle’s speeds (miles per hour) |
| TDc | Calculated traffic density (veh/mile/ln) |
| TDp | Previously calculated traffic density (veh/mile/ln) |
| ΔTD | Change in traffic density (veh/mile/ln) |
| ΔTR | Toll rate adjustment (USD) |
| TRs or p | Seed or previously calculated toll rate (USD) |
| LOSe | Existing level of service (A, B, C, D, E, or F) |
| TRi | Initial toll rate (USD) |
| TRf | Final toll rate (USD) |
| Experiments ID’s of Subset 1 (Uniform Errors Applied for All Sensors) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Uniform Error | 0% | +5% | −5% | +10% | −10% | +15% | −15% | +20% | −20% |
| Experiment ID—Southbound | 1.1 | 1.2 | 1.3 | 1.4 | 1.5 | 1.6 | 1.7 | 1.8 | 1.9 |
| Experiment ID—Northbound | 1.10 | 1.11 | 1.12 | 1.13 | 1.14 | 1.15 | 1.16 | 1.17 | 1.18 |
| Experiments ID’s and Used Sensor for Each Experiment in Subset 2 | |||||||||
| Experiment ID | Southbound | Exp.ID | Northbound | ||||||
| Y% of Sensors Failed | Used Sensor(s) | Y% of Sensors Failed | Used Sensor(s) | ||||||
| 1.19 | 25% | 14.3,14.9,15.1 | 1.23 | 33.33% | 14.5,14.9 | ||||
| 1.20 | 50% | 14.6,15.1 | 1.24 | 66.67% | 14.6 | ||||
| 1.21 | 75% | 14.9 | |||||||
| 1.22 | 100% | Time of Day table | 1.25 | 100% | Time of Day table | ||||
| Random Detection Error Scenarios for Southbound Segment | ||||
|---|---|---|---|---|
| Experiment ID | Y% of Sensors Failed | Used Sensor(s) | X% Modeled Error | Sensor(s) Subjected to X% Error, Respectively |
| 2.1 | 0% | 14.3,14.6,14.9,15.1 | +5, +15% | 14.3,14.6 |
| 2.2 | 0% | 14.3,14.6,14.9,15.1 | −5, −15% | 14.3,14.6 |
| 2.3 | 0% | 14.3,14.6,14.9,15.1 | +10, +5% | 14.6,14.9 |
| 2.4 | 0% | 14.3,14.6,14.9,15.1 | −10, −5% | 14.6,14.9 |
| 2.5 | 0% | 14.3,14.6,14.9,15.1 | +10, +15, +5% | 14.3,14.9,15.1 |
| 2.6 | 0% | 14.3,14.6,14.9,15.1 | −10, −15, −5% | 14.3,14.9,15.1 |
| 2.7 | 0% | 14.3,14.6,14.9,15.1 | +10, +10, +20% | 14.3,14.6,15.1 |
| 2.8 | 0% | 14.3,14.6,14.9,15.1 | −10, −10, −20% | 14.3,14.6,15.1 |
| 2.9 | 0% | 14.3,14.6,14.9,15.1 | +15% | 14.9 |
| 2.10 | 0% | 14.3,14.6,14.9,15.1 | −15% | 14.9 |
| 2.11 | 25% | 14.3,14.9,15.1 | +10, +15% | 14.9,15.1 |
| 2.12 | 25% | 14.3,14.9,15.1 | −10, −15% | 14.9,15.1 |
| 2.13 | 25% | 14.3,14.9,15.1 | +10, +15, +20% | 14.3,14.9,15.1 |
| 2.14 | 25% | 14.3,14.9,15.1 | −10, −15, −20% | 14.3,14.9,15.1 |
| 2.15 | 50% | 14.6,15.1 | +15% | 15.1 |
| 2.16 | 50% | 14.6,15.1 | −15% | 15.1 |
| 2.17 | 50% | 14.3,15.1 | +10, +20% | 14.3,15.1 |
| 2.18 | 50% | 14.3,15.1 | −10, −20% | 14.3,15.1 |
| 2.19 | 75% | 14.9 | +10% | 14.9 |
| 2.20 | 75% | 14.9 | −10% | 14.9 |
| 2.21 | 75% | 14.3 | +15% | 14.3 |
| 2.22 | 75% | 14.3 | −15% | 14.3 |
| Random detection error scenarios for Northbound segment | ||||
| 2.23 | 0% | 14.5,14.6,14.9 | +10, +15, +20% | 14.5,14.6,14.9 |
| 2.24 | 0% | 14.5,14.6,14.9 | −10, −15, −20% | 14.5,14.6,14.9 |
| 2.25 | 0% | 14.5,14.6,14.9 | +10, +20% | 14.5,14.6 |
| 2.26 | 0% | 14.5,14.6,14.9 | −10, −20% | 14.5,14.6 |
| 2.27 | 0% | 14.5,14.6,14.9 | +10, +10% | 14.5,14.9 |
| 2.28 | 0% | 14.5,14.6,14.9 | −10, −10% | 14.5,14.9 |
| 2.29 | 0% | 14.5,14.6,14.9 | +5, +20% | 14.6,14.9 |
| 2.30 | 0% | 14.5,14.6,14.9 | −5, −20% | 14.6,14.9 |
| 2.31 | 33.33% | 14.5,14.6 | +15% | 14.9 |
| 2.32 | 33.33% | 14.5,14.6 | −15% | 14.9 |
| 2.33 | 33.33% | 14.5,14.6 | +10% | 14.9,15.1 |
| 2.34 | 33.33% | 14.5,14.6 | −10% | 14.9,15.1 |
| 2.35 | 33.33% | 14.5,14.6 | +10, +15% | 14.3,14.9,15.1 |
| 2.36 | 33.33% | 14.5,14.6 | −10, −15% | 14.3,14.9,15.1 |
| 2.37 | 33.33% | 14.5,14.6 | +15, +20% | 15.1 |
| 2.38 | 33.33% | 14.5,14.6 | −15, −20% | 15.1 |
| 2.39 | 66.67% | 14.6 | +10% | 14.6 |
| 2.40 | 66.67% | 14.6 | −10% | 14.6 |
| 2.41 | 66.67% | 14.9 | +20% | 14.9 |
| 2.42 | 66.67% | 14.9 | −20% | 14.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshayeb, S.; Stevanovic, A.; Mitrovic, N.; Dimitrijevic, B. Impact of Accurate Detection of Freeway Traffic Conditions on the Dynamic Pricing: A Case Study of I-95 Express Lanes. Sensors 2021, 21, 5997. https://doi.org/10.3390/s21185997
Alshayeb S, Stevanovic A, Mitrovic N, Dimitrijevic B. Impact of Accurate Detection of Freeway Traffic Conditions on the Dynamic Pricing: A Case Study of I-95 Express Lanes. Sensors. 2021; 21(18):5997. https://doi.org/10.3390/s21185997
Chicago/Turabian StyleAlshayeb, Suhaib, Aleksandar Stevanovic, Nikola Mitrovic, and Branislav Dimitrijevic. 2021. "Impact of Accurate Detection of Freeway Traffic Conditions on the Dynamic Pricing: A Case Study of I-95 Express Lanes" Sensors 21, no. 18: 5997. https://doi.org/10.3390/s21185997
APA StyleAlshayeb, S., Stevanovic, A., Mitrovic, N., & Dimitrijevic, B. (2021). Impact of Accurate Detection of Freeway Traffic Conditions on the Dynamic Pricing: A Case Study of I-95 Express Lanes. Sensors, 21(18), 5997. https://doi.org/10.3390/s21185997