
Development of a Reference-Free Indirect Bridge Displacement Sensing System


Abstract
:1. Introduction
2. Development of a Multimetric Sensing Board
2.1. Design Challenges
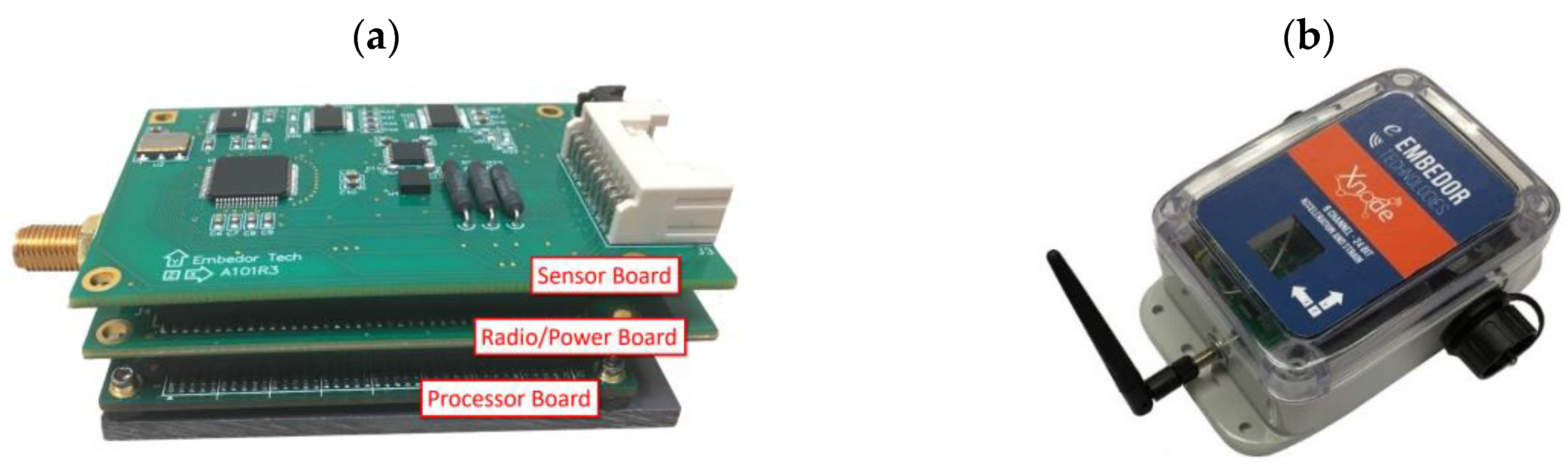
2.2. Xnode
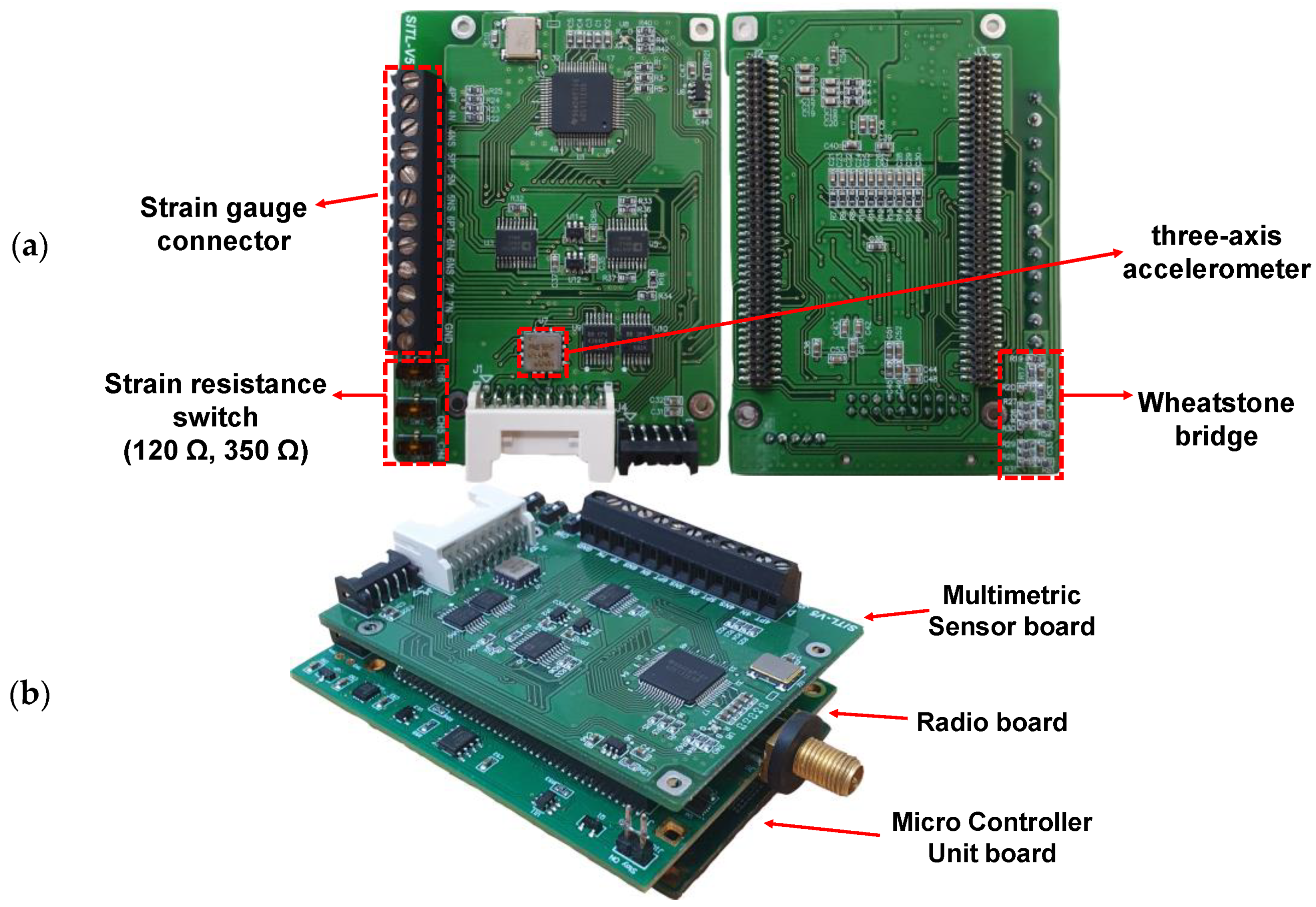
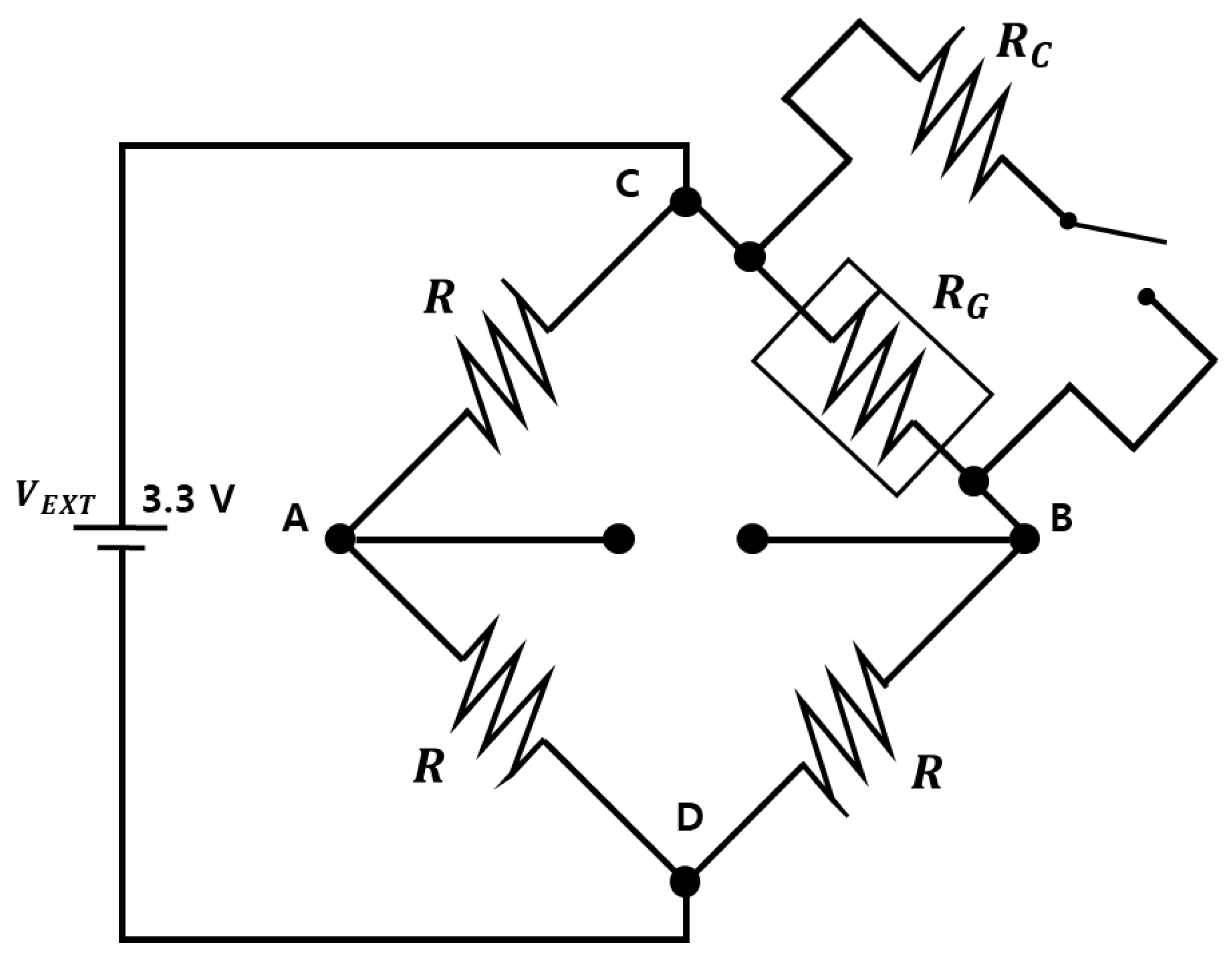
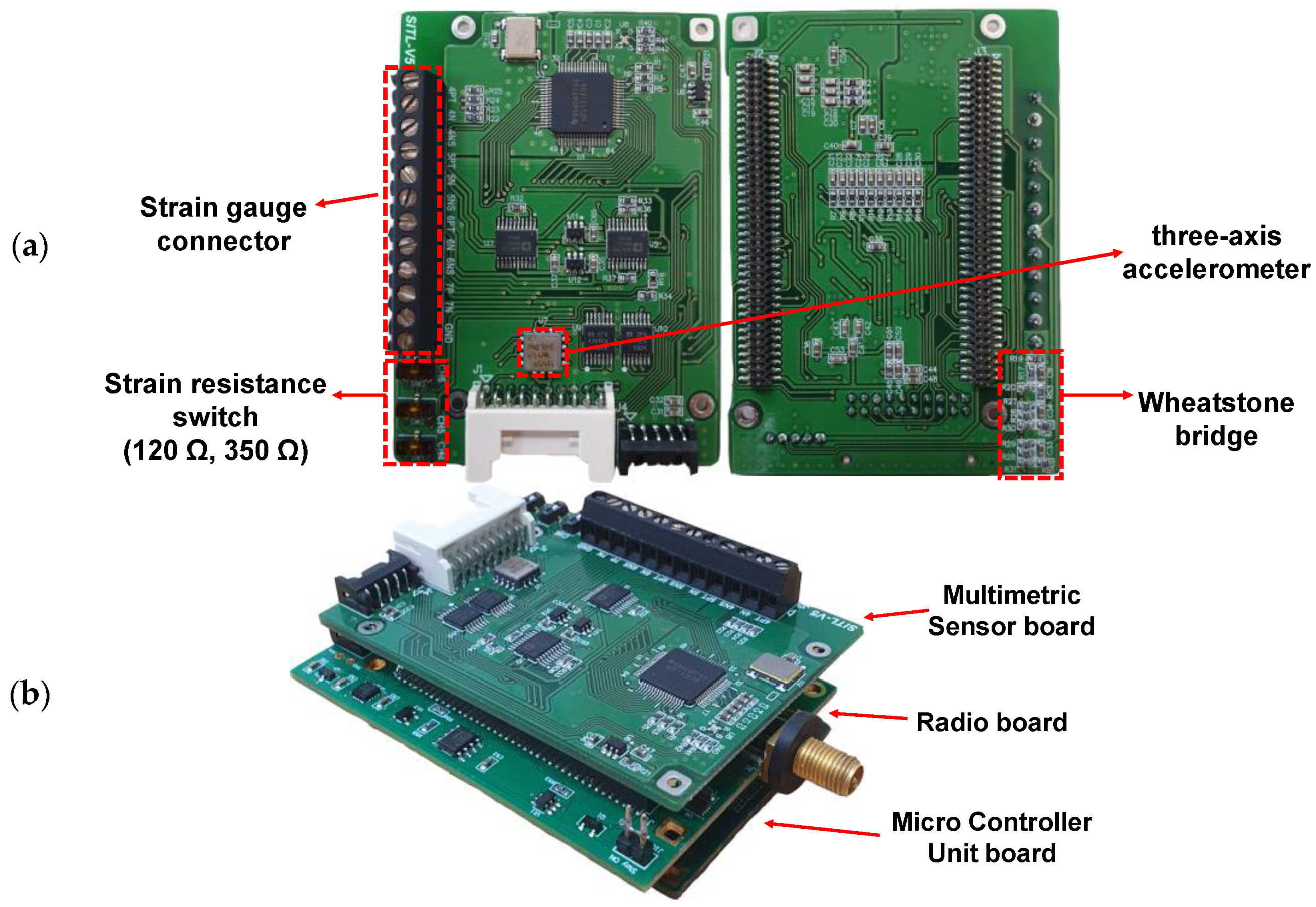
2.3. Multimetric Sensor Board
3. Optimal Sensor Location for Reference-Free Indirect Displacement Estimation
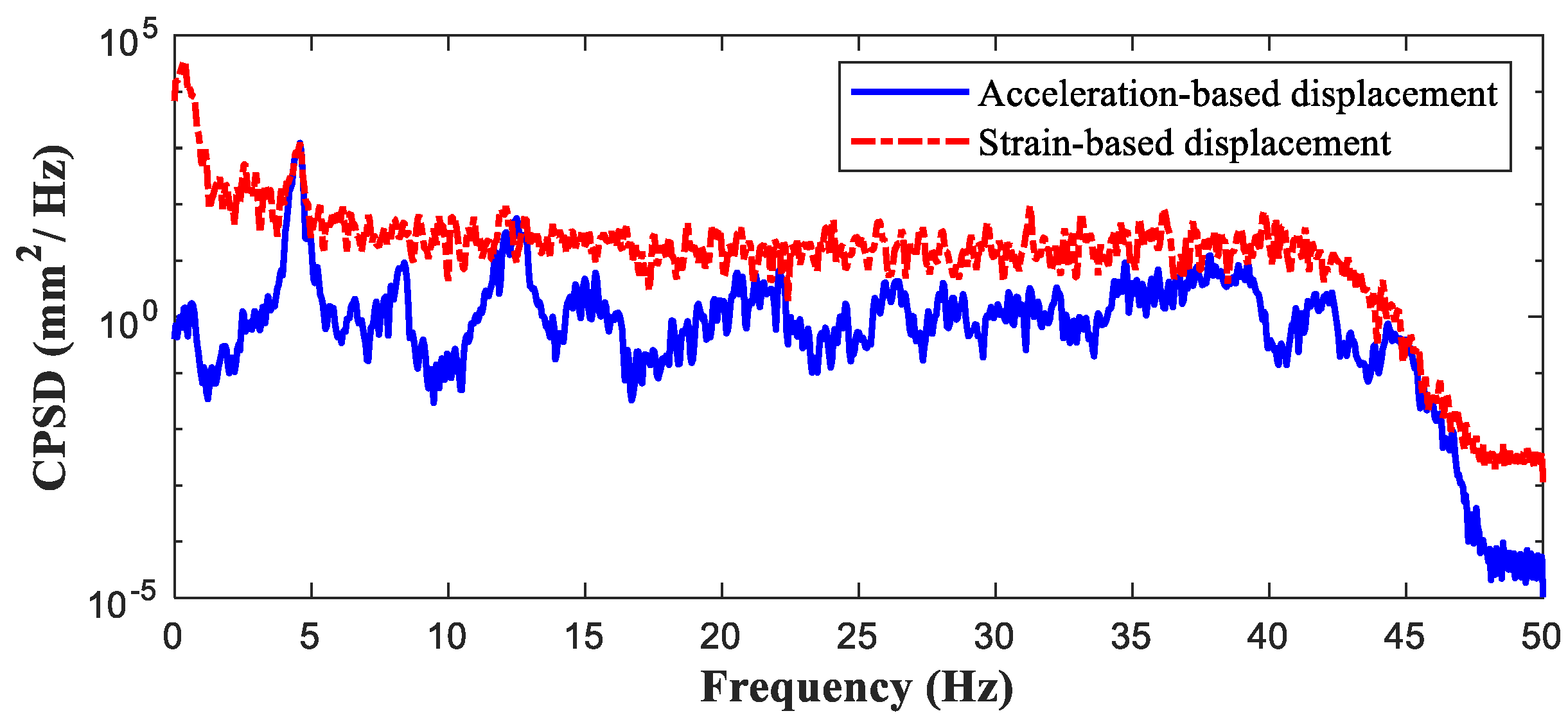
3.1. Reference-Free Indirect Displacement Estimation
3.2. Setup for Numerical Analysis
3.3. Results and Discussion
4. Experimental Validation
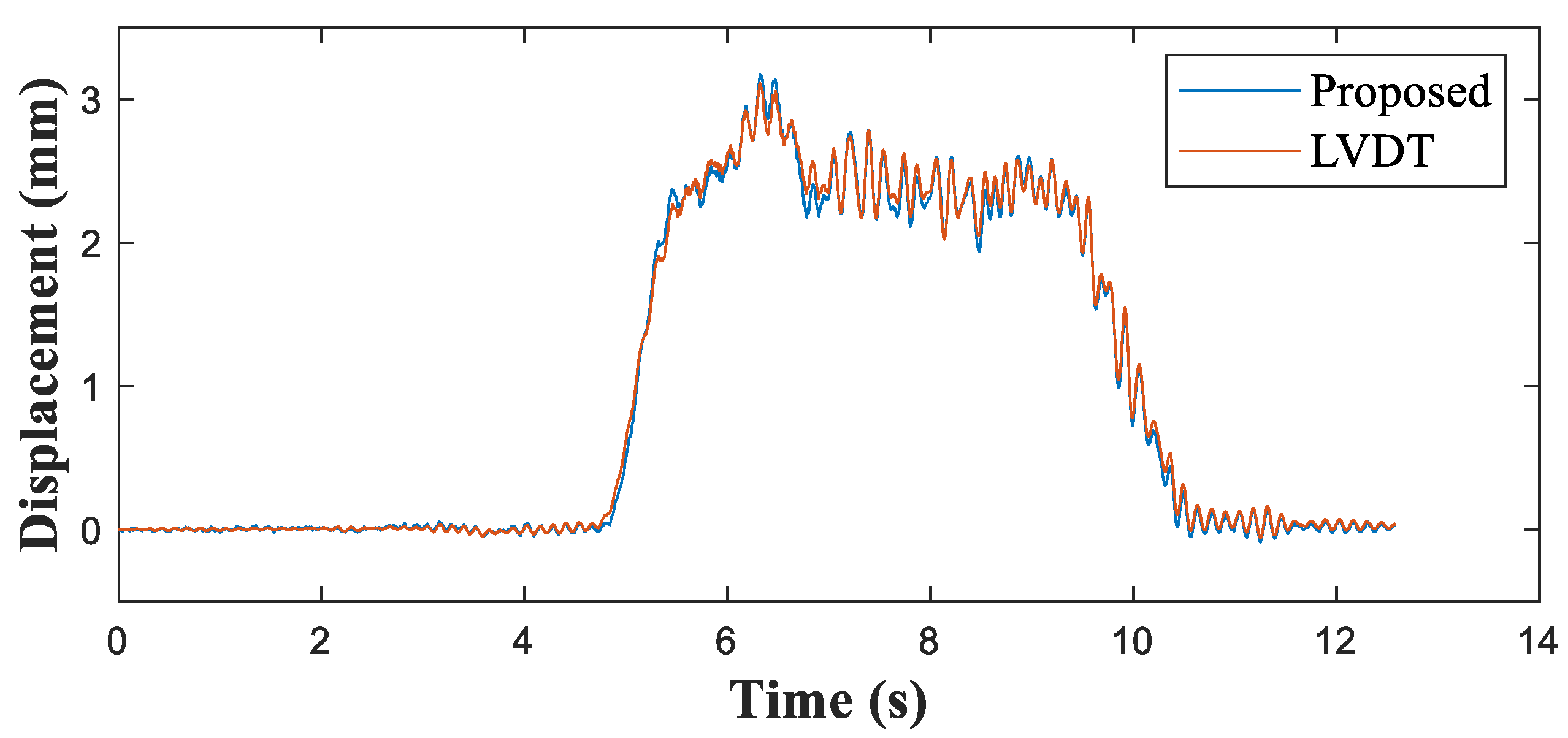
4.1. Validation on the Keukrak Bridge
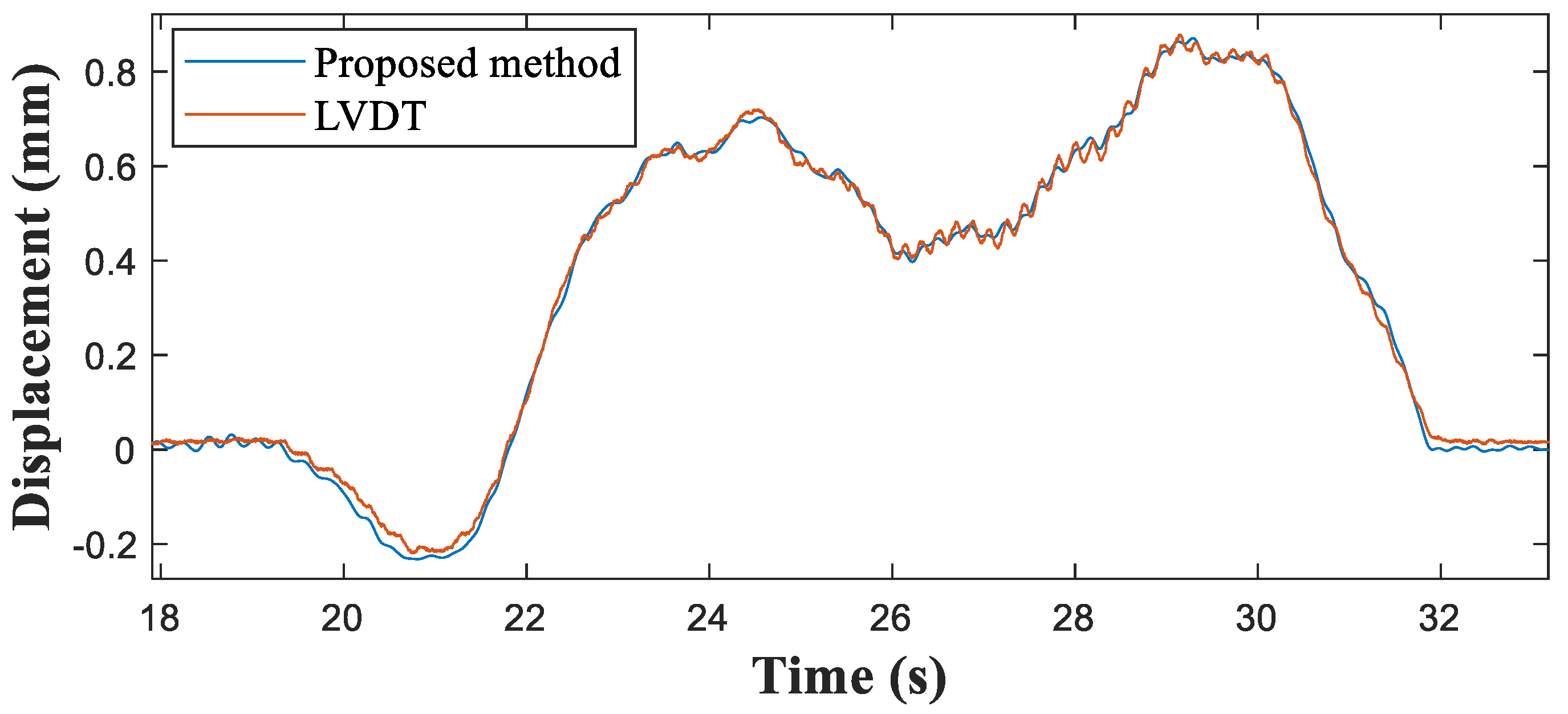
4.2. Validation on the Jojungchun Bridge
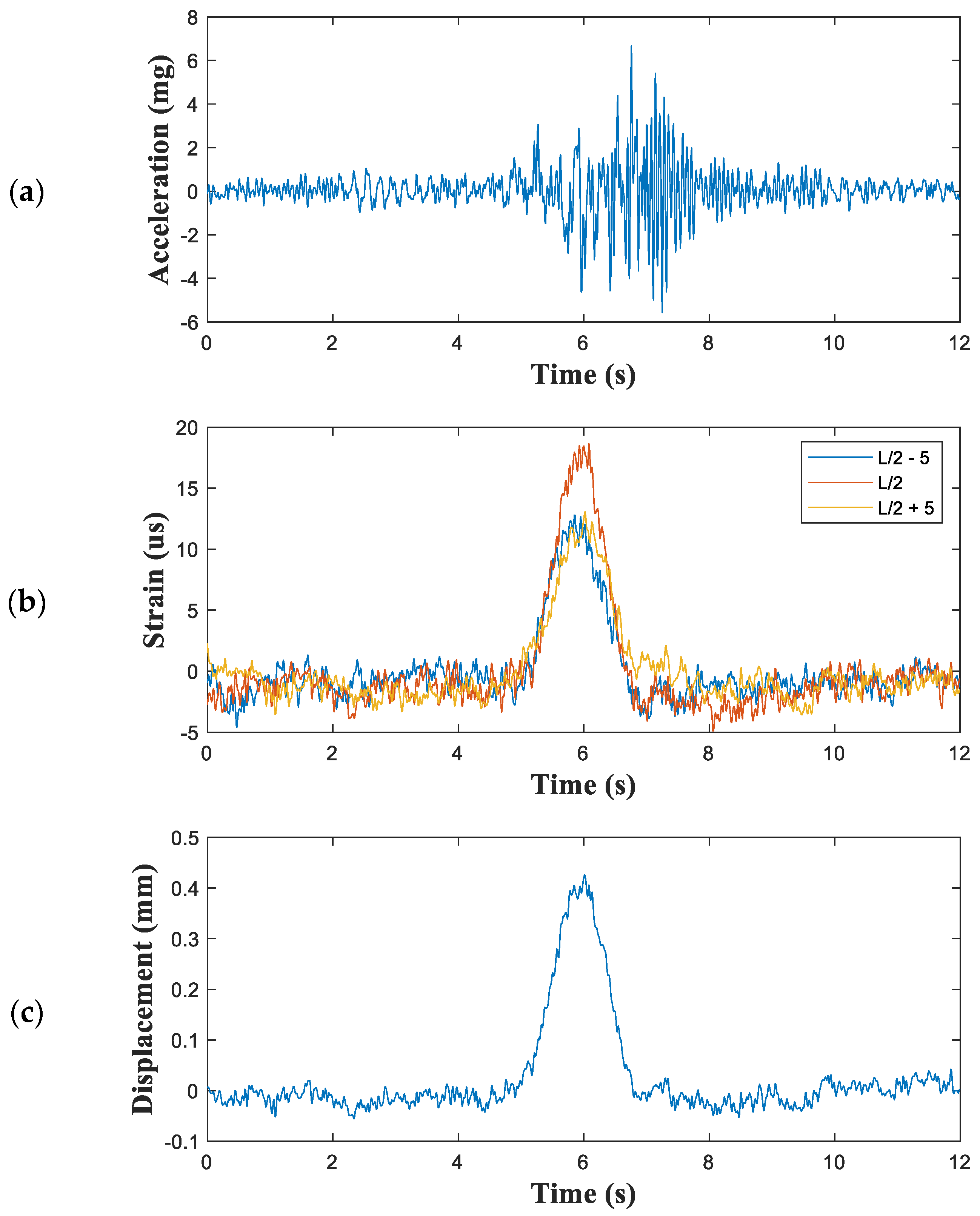
4.3. Application of Developed System to the Geumgok Bridge
5. Conclusions
- The developed multimetric board simultaneously observed the three-axis acceleration and three-channel strains and estimated the reference-free displacement.
- To enhance the accuracy of the displacement estimation, the placements of the three-channel strains were optimized in a numerical study.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gomez, F.; Park, J.-W.; Spencer, B.F., Jr. Reference-free structural dynamic displacement estimation method. Struct. Control Health Monit. 2018, 25, e2209. [Google Scholar] [CrossRef]
- Sarwar, M.Z.; Park, J.-W. Bridge displacement estimation using a co-located acceleration and strain. Sensors 2020, 20, 1109. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Lee, K.-C.; Cho, S.; Sim, S.-H. Computer vision-based structural displacement measurement robust to light-induced image degradation for in-service bridges. Sensors 2017, 17, 2317. [Google Scholar] [CrossRef] [Green Version]
- Hoskere, V.; Park, J.-W.; Yoon, H.; Spencer, B.F., Jr. Vision-based modal survey of civil infrastructure using unmanned aerial vehicles. J. Struct. Eng. 2019, 145, 04019062. [Google Scholar] [CrossRef]
- Yoon, H.; Elanwar, H.; Choi, H.; Golparvar-Fard, M.; Spencer, B.F., Jr. Target-free approach for vision-based structural system identification using consumer-grade cameras. Struct. Control Health Monit. 2016, 23, 1405–1416. [Google Scholar] [CrossRef]
- Won, J.; Park, J.-W.; Park, K.; Yoon, H.; Moon, D.-S. Non-target structural displacement measurement using reference frame-based deepflow. Sensors 2019, 19, 2992. [Google Scholar] [CrossRef] [Green Version]
- Feng, M.Q.; Fukuda, Y.; Feng, D.; Mizuta, M.J. Nontarget vision sensor for remote measurement of bridge dynamic response. J. Bridge Eng. 2015, 20, 04015023. [Google Scholar] [CrossRef]
- Lee, J.; Lee, K.C.; Lee, S.; Lee, Y.J.; Sim, S.H. Long-term displacement measurement of bridges using a LiDAR system. Struct. Control Health Monit. 2019, 26, e2428. [Google Scholar] [CrossRef]
- Kim, K.; Sohn, H. Dynamic displacement estimation by fusing LDV and LiDAR measurements via smoothing based Kalman filtering. Mech. Syst. Signal Process. 2017, 82, 339–355. [Google Scholar] [CrossRef]
- Pieraccini, M. Monitoring of civil infrastructures by interferometric radar: A review. Sci. World J. 2013, 2013, 786961. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, Y.; Zhao, W.; Zhang, J. Radar-based multipoint displacement measurements of a 1200-m-long suspension bridge. ISPRS J. Photogramm. Remote Sens. 2020, 167, 71–84. [Google Scholar] [CrossRef]
- Miccinesi, L.; Beni, A.; Pieraccini, M. Multi-Monostatic Interferometric Radar for Bridge Monitoring. Electronics 2021, 10, 247. [Google Scholar] [CrossRef]
- Lee, H.S.; Hong, Y.H.; Park, H.W. Design of an FIR filter for the displacement reconstruction using measured acceleration in low-frequency dominant structures. Int. J. Numer. Methods Eng. 2010, 82, 403–434. [Google Scholar] [CrossRef]
- Hong, Y.H.; Kim, H.-K.; Lee, H.S. Reconstruction of dynamic displacement and velocity from measured accelerations using the variational statement of an inverse problem. J. Sound Vib. 2010, 329, 4980–5003. [Google Scholar] [CrossRef]
- Liu, B.; Ozdagli, A.I.; Moreu, F. Direct reference-free measurement of displacements for railroad bridge management. Struct. Control Health Monit. 2018, 25, e2241. [Google Scholar] [CrossRef]
- Wang, Z.-C.; Geng, D.; Ren, W.-X.; Liu, H.-T. Strain modes based dynamic displacement estimation of beam structures with strain sensors. Smart Mater. Struct. 2014, 23, 125045. [Google Scholar] [CrossRef]
- Jeon, J.-C.; Lee, H.-H. Development of displacement estimation method of girder bridges using measured strain signal induced by vehicular loads. Eng. Struct. 2019, 186, 203–215. [Google Scholar] [CrossRef]
- Li, C.-J.; Ulsoy, A.G. High-precision measurement of tool-tip displacement using strain gauges in precision flexible line boring. Mech. Syst. Signal Process. 1999, 13, 531–546. [Google Scholar] [CrossRef]
- Park, J.W.; Sim, S.H.; Jung, H.J. Displacement estimation using multimetric data fusion. IEEE/ASME Trans. Mechatron. 2013, 18, 1675–1682. [Google Scholar] [CrossRef]
- Park, J.W.; Lee, K.C.; Sim, S.H.; Jung, H.J.; Spencer, B.F., Jr. Traffic safety evaluation for railway bridges using expanded multisensor data fusion. Comput.-Aided Civ. Infrastruct. Eng. 2016, 31, 749–760. [Google Scholar] [CrossRef]
- Park, J.W.; Sim, S.H.; Jung, H.J. Wireless displacement sensing system for bridges using multi-sensor fusion. Smart Mater. Struct. 2014, 23, 045022. [Google Scholar] [CrossRef]
- Linderman, L.E.; Rice, J.A.; Barot, S.; Spencer, B.F., Jr.; Bernhard, J.T. Characterization of wireless smart sensor performance. J. Eng. Mech. 2010, 136, 1435–1443. [Google Scholar] [CrossRef] [Green Version]
- Fasl, J.; Helwig, T.; Wood, S.L.; Pasupathy, P.; Neikirk, D.P.; Raffaeli, F. Factors affecting wireless network communication in monitoring systems for steel bridges. J. Civ. Struct. Health Monit. 2012, 2, 87–95. [Google Scholar] [CrossRef]
- Spencer, B.F., Jr.; Park, J.W.; Mechitov, K.A.; Jo, H.; Agha, G. Next, generation wireless smart sensors toward sustainable civil infrastructure. Procedia Eng. 2017, 171, 5–13. [Google Scholar] [CrossRef]
- Zhu, L.; Fu, Y.; Chow, R.; Spencer, B.F.; Park, J.W.; Mechitov, K.J.S. Development of a high-sensitivity wireless accelerometer for structural health monitoring. Sensors 2018, 18, 262. [Google Scholar] [CrossRef] [PubMed]
- Fu, Y.; Mechitov, K.; Hoang, T.; Kim, J.R.; Lee, D.H.; Spencer, B.F., Jr. Development and full-scale validation of high-fidelity data acquisition on a next-generation wireless smart sensor platform. Adv. Struct. Eng. 2019, 22, 3512–3533. [Google Scholar] [CrossRef]
- NXP. LPC4357. Available online: https://www.nxp.com/products/processors-and-micro-controllers/arm-microcontrollers/general-purpose-mcus/lpc4300-cortex-m4-m0/high-performance-32-bit-microcontroller-mcu-based-on-arm-cortex-m4-m0-cores:LPC4357FET256 (accessed on 15 July 2021).
- Microchip. AT86RF233 Datasheet and Product Info. Available online: https://www.micro-chip.com/wwwproducts/en/AT86RF233 (accessed on 15 July 2021).
- Texas Instruments. ADS131E08 Datasheet and Product Info. Available online: https://www.ti.com/document-viewer/ADS131E08/datasheet (accessed on 15 July 2021).
- Analog Devices. ADXL354 Datasheet and Product Info. Available online: https://www.ana-log.com/en/products/adxl354.html# (accessed on 15 July 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configurations | Front | Rear | |
|---|---|---|---|
| Two-wheel car | 20 kN | 20 kN | |
| Three-wheel truck | 35 kN | 145 kN | 145 kN |
| Bridge Type | Span | Strain Measurement Distance from Center |
|---|---|---|
| Prestressed concrete | 21 m | 4 m |
| Method | Maximum Displacement (mm) | Error (mm) | Error (%) |
|---|---|---|---|
| Proposed method | 3.18 | 0.07 | 2.17 |
| Reference displacement | 3.11 | - | - |
| Bridge Type | Span | Strain Measurement Distance from Center |
|---|---|---|
| Three-cell steel-box girder | 40 m | 10 m |
| Method | Maximum Displacement (mm) | Error (mm) | Error (%) |
|---|---|---|---|
| Proposed method | 0.8795 | 0.0015 | 0.17 |
| Reference displacement | 0.8780 | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Won, J.; Park, J.-W.; Park, J.; Shin, J.; Park, M. Development of a Reference-Free Indirect Bridge Displacement Sensing System. Sensors 2021, 21, 5647. https://doi.org/10.3390/s21165647
Won J, Park J-W, Park J, Shin J, Park M. Development of a Reference-Free Indirect Bridge Displacement Sensing System. Sensors. 2021; 21(16):5647. https://doi.org/10.3390/s21165647
Chicago/Turabian StyleWon, Jongbin, Jong-Woong Park, Junyoung Park, Junsik Shin, and Minyong Park. 2021. "Development of a Reference-Free Indirect Bridge Displacement Sensing System" Sensors 21, no. 16: 5647. https://doi.org/10.3390/s21165647
APA StyleWon, J., Park, J.-W., Park, J., Shin, J., & Park, M. (2021). Development of a Reference-Free Indirect Bridge Displacement Sensing System. Sensors, 21(16), 5647. https://doi.org/10.3390/s21165647