
Extracting Key Traffic Parameters from UAV Video with On-Board Vehicle Data Validation


Abstract
:1. Introduction
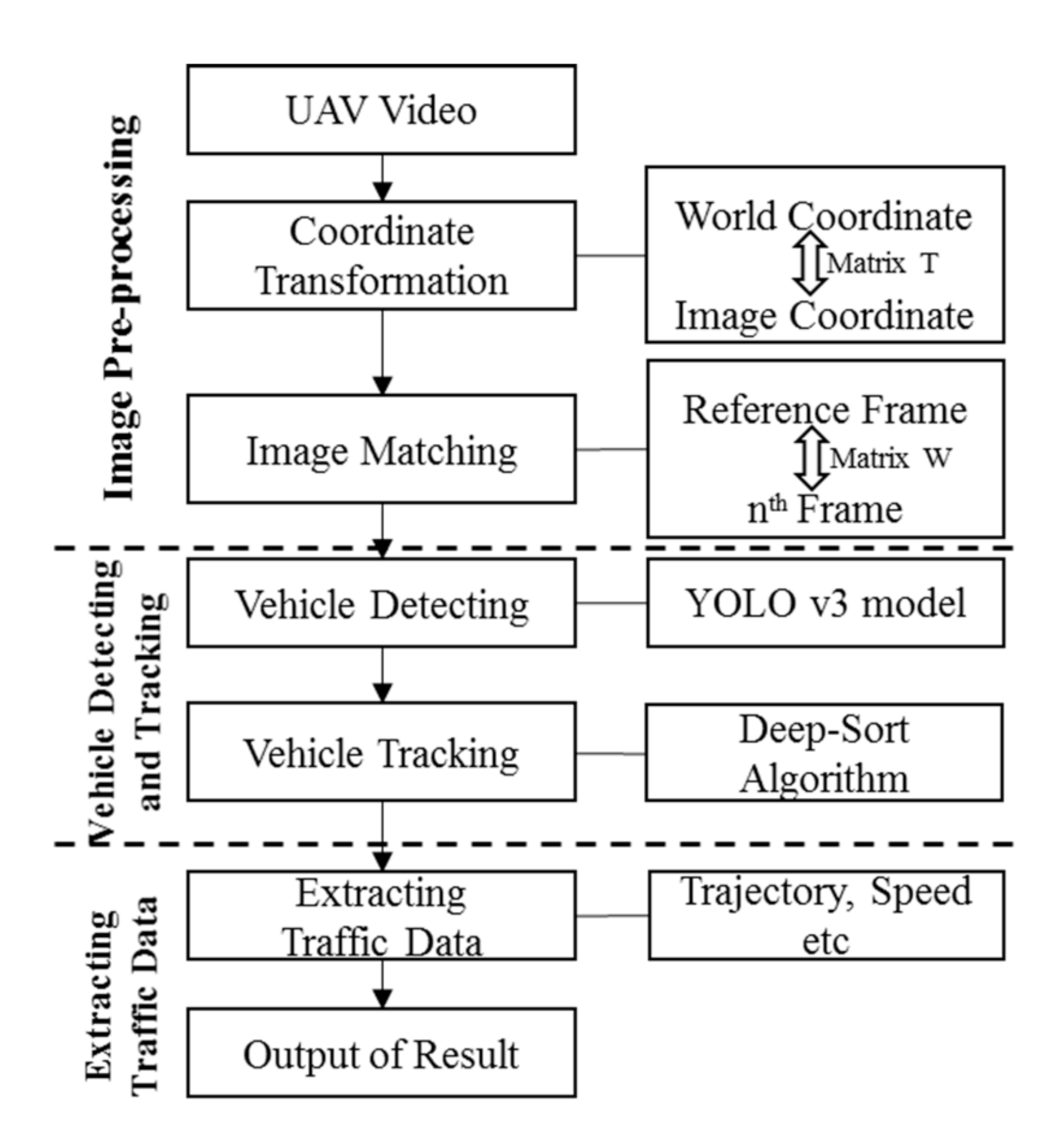
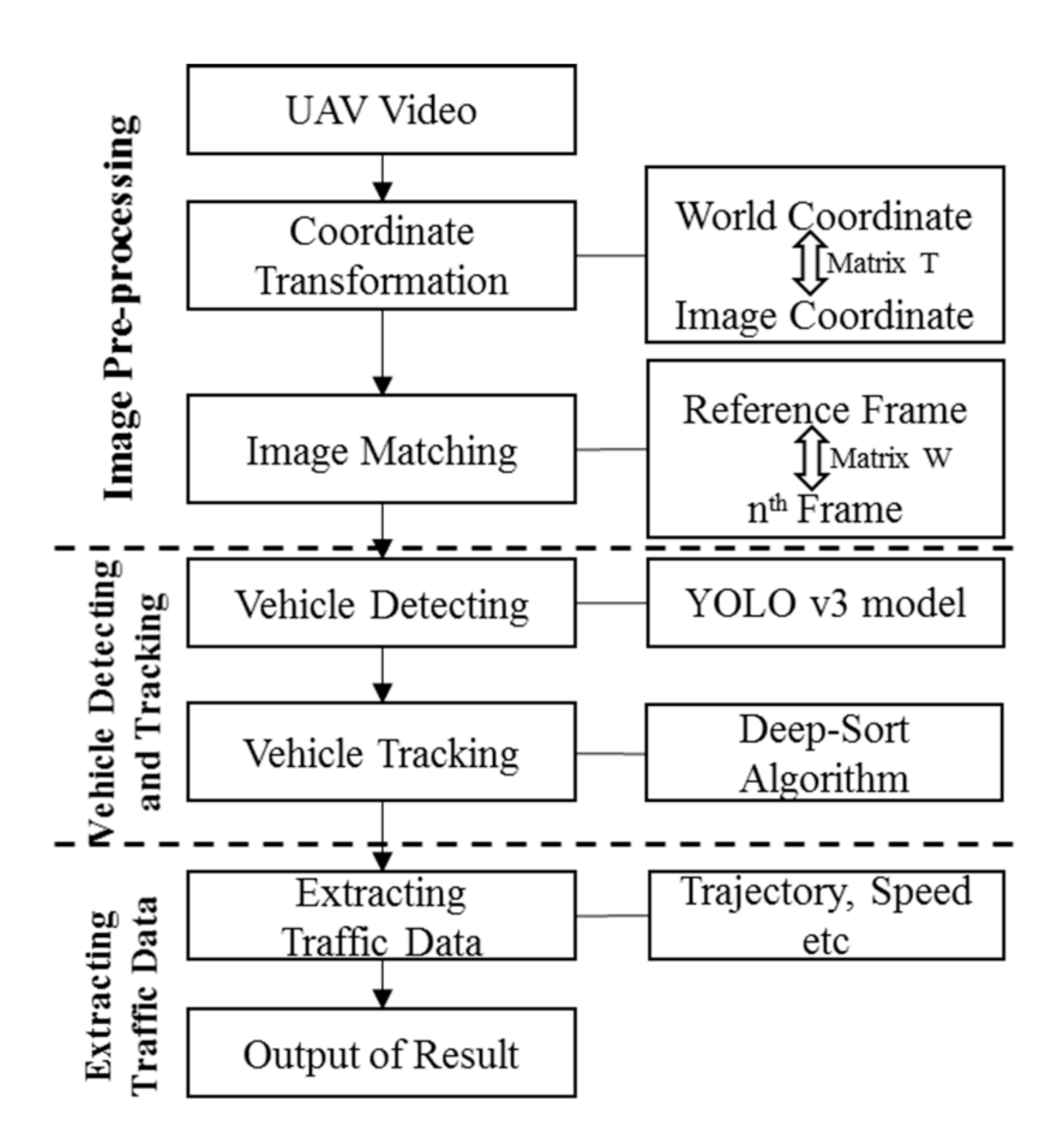
2. Traffic Data Extraction Methodology
2.1. Image Pre-Processing
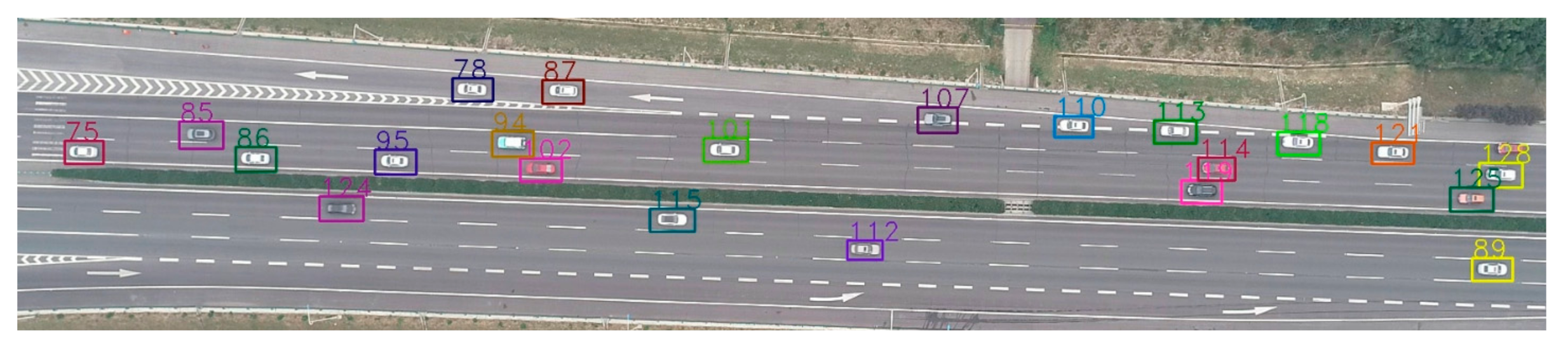
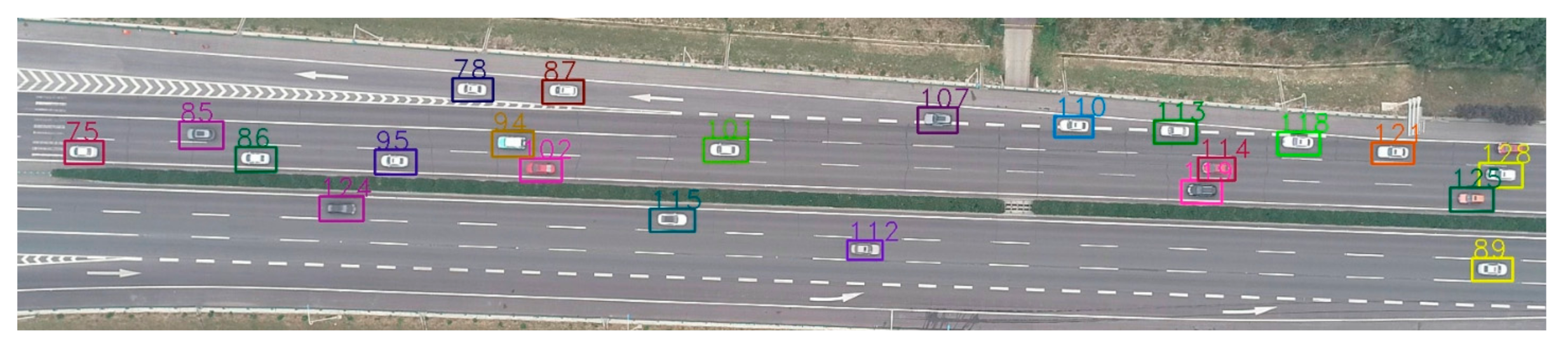
2.2. Vehicle Detecting and Tracking
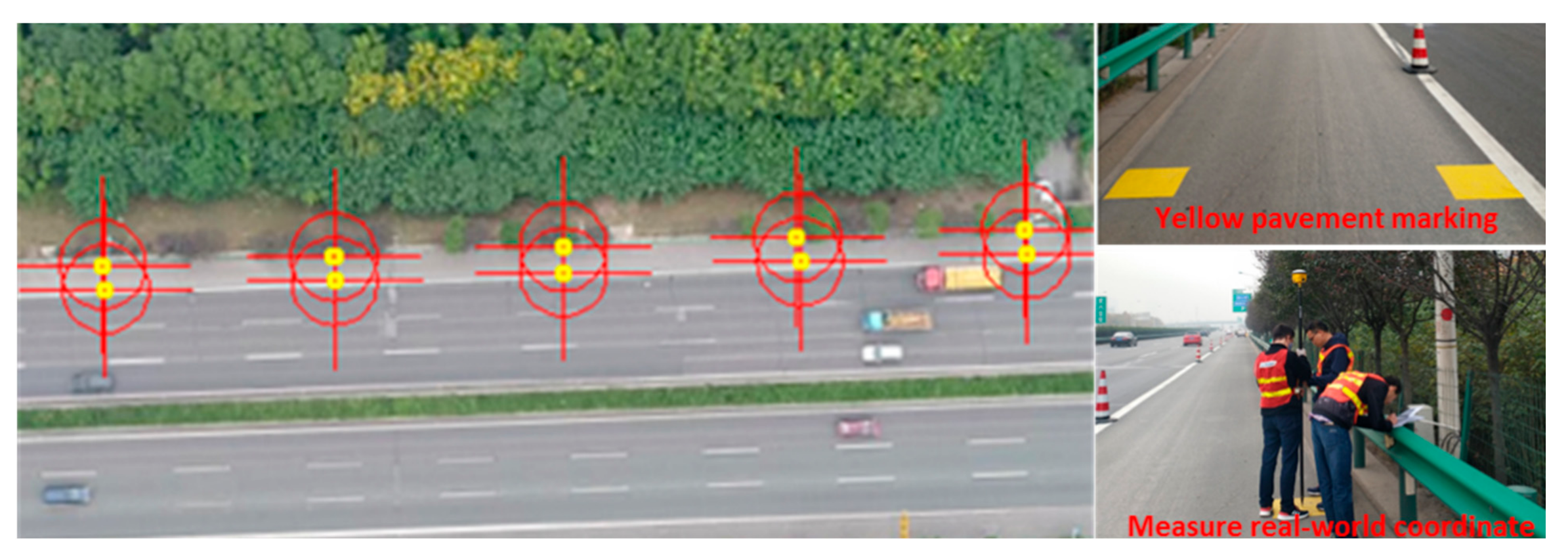
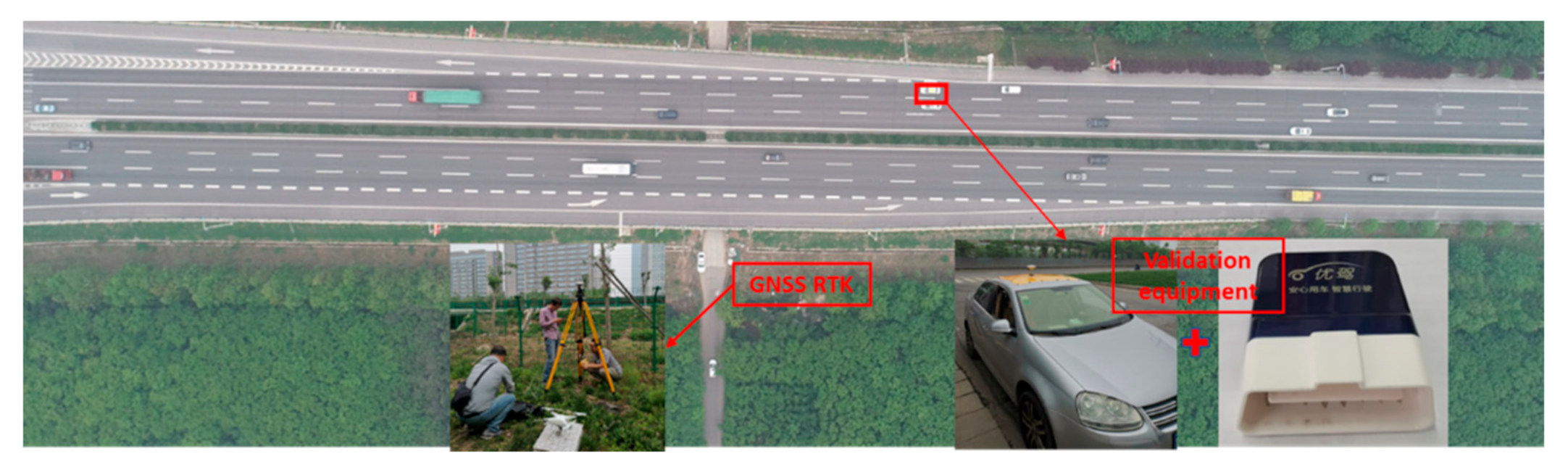
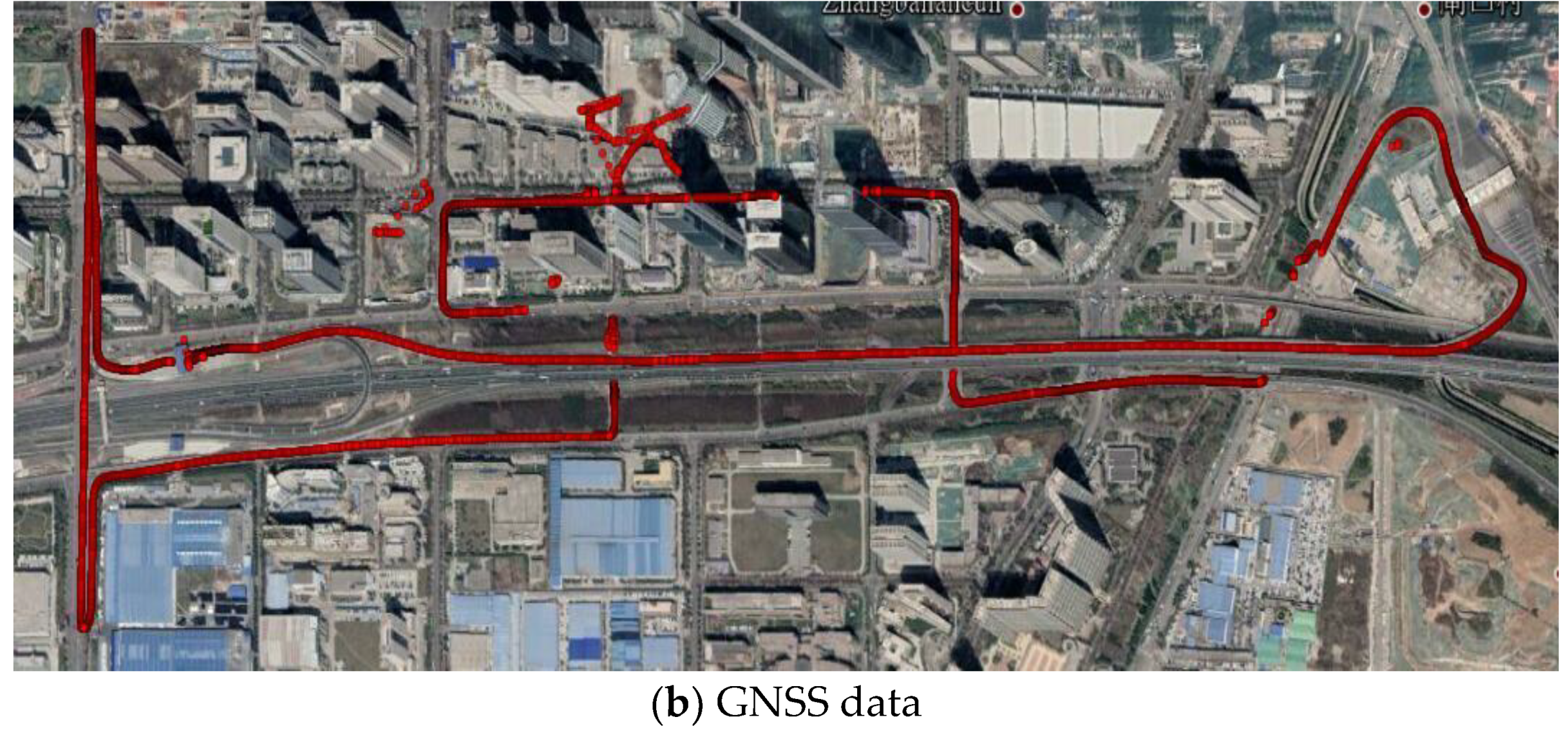
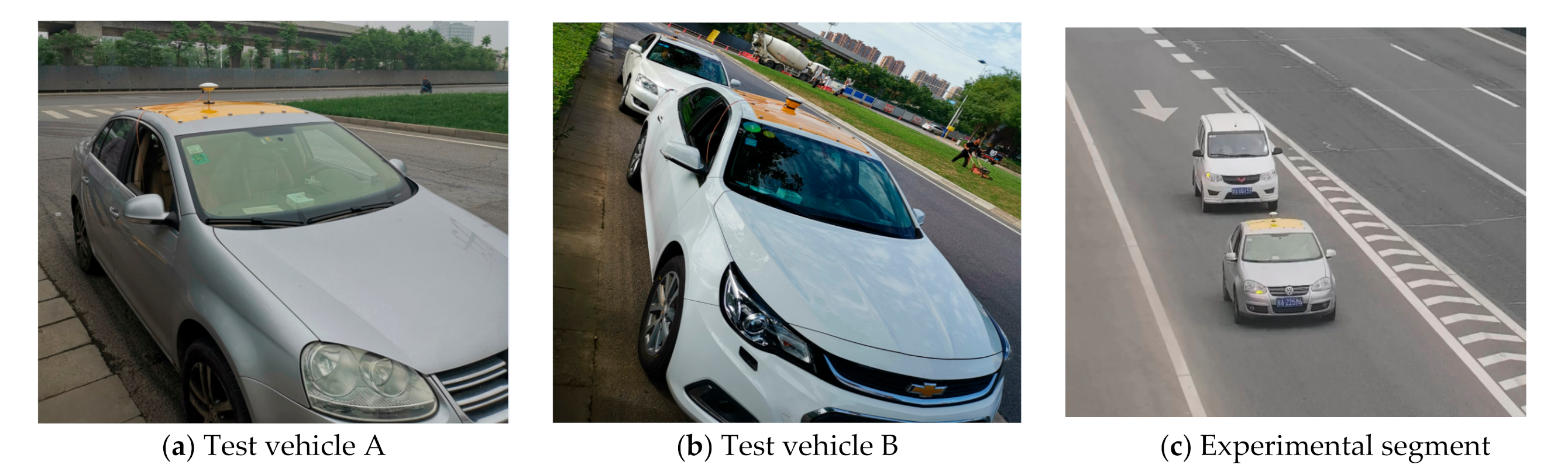
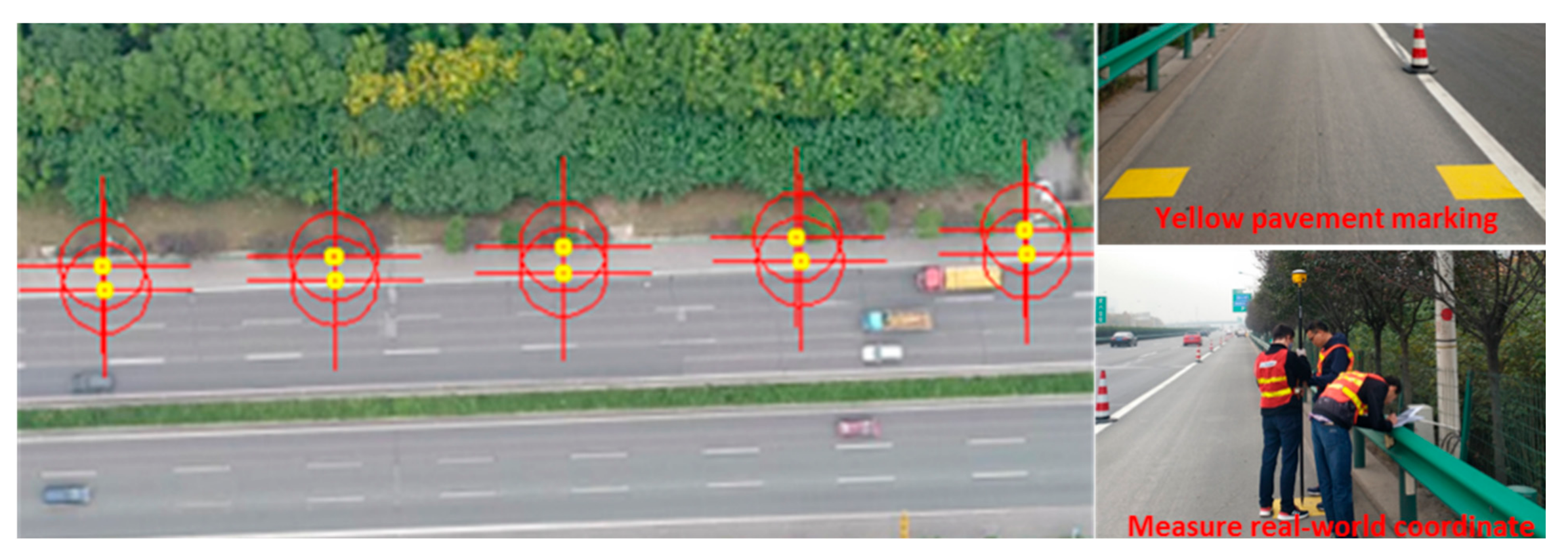
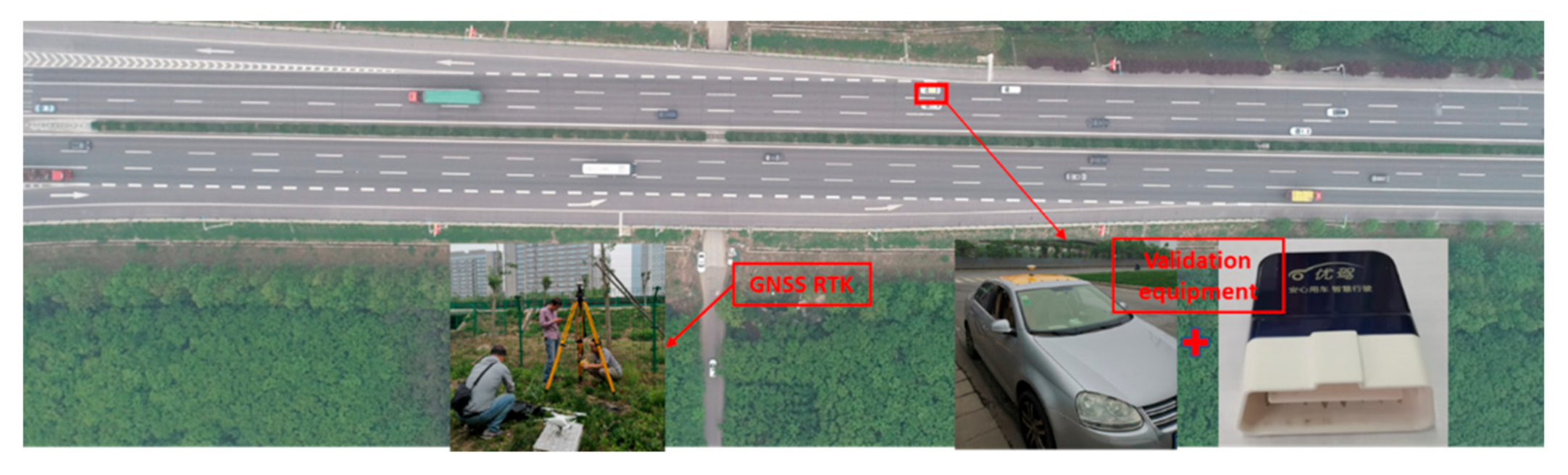
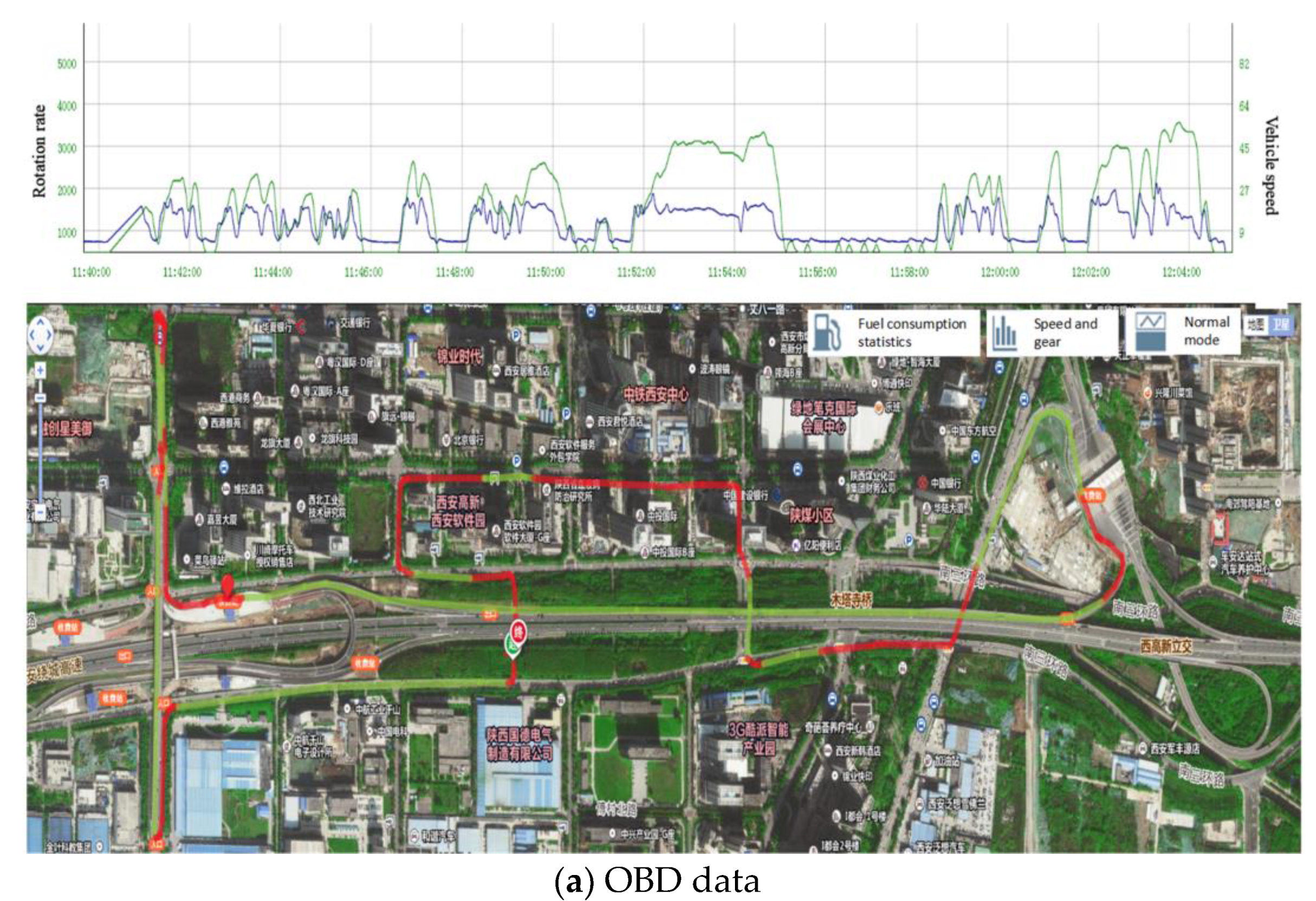
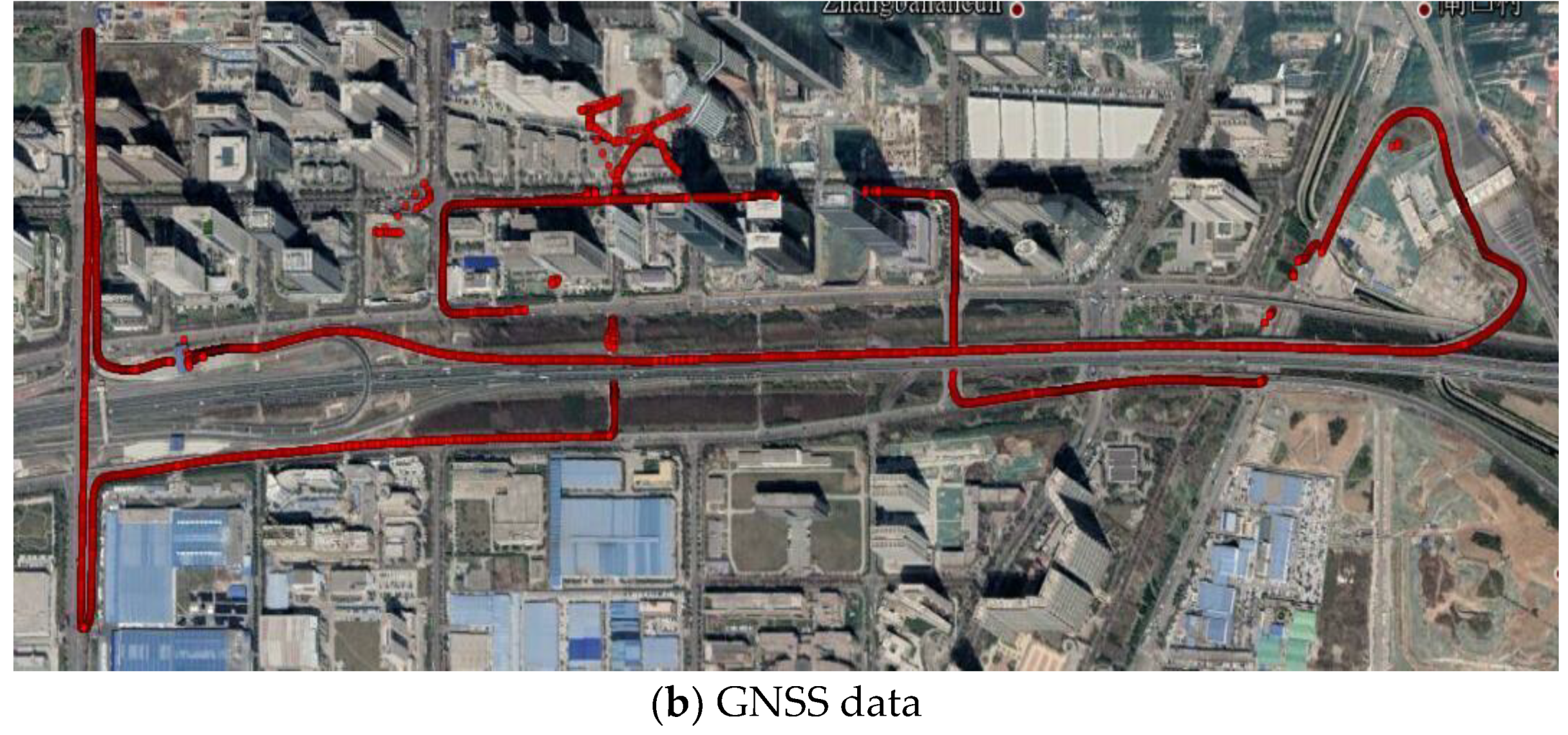
3. Experiment
4. Results
4.1. The Precision of Vehicle Detection
4.2. The Precision of Vehicle Tracking
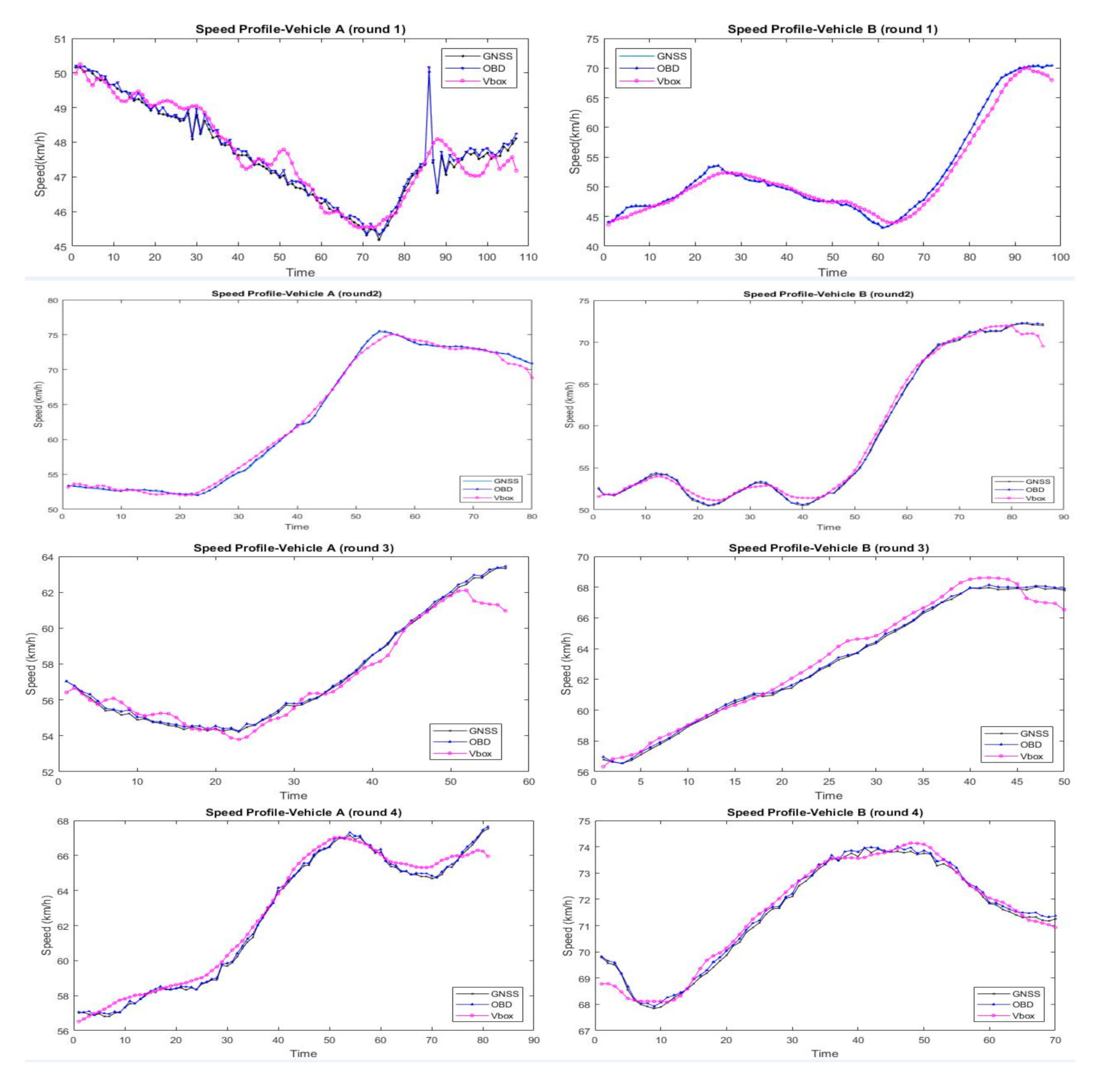
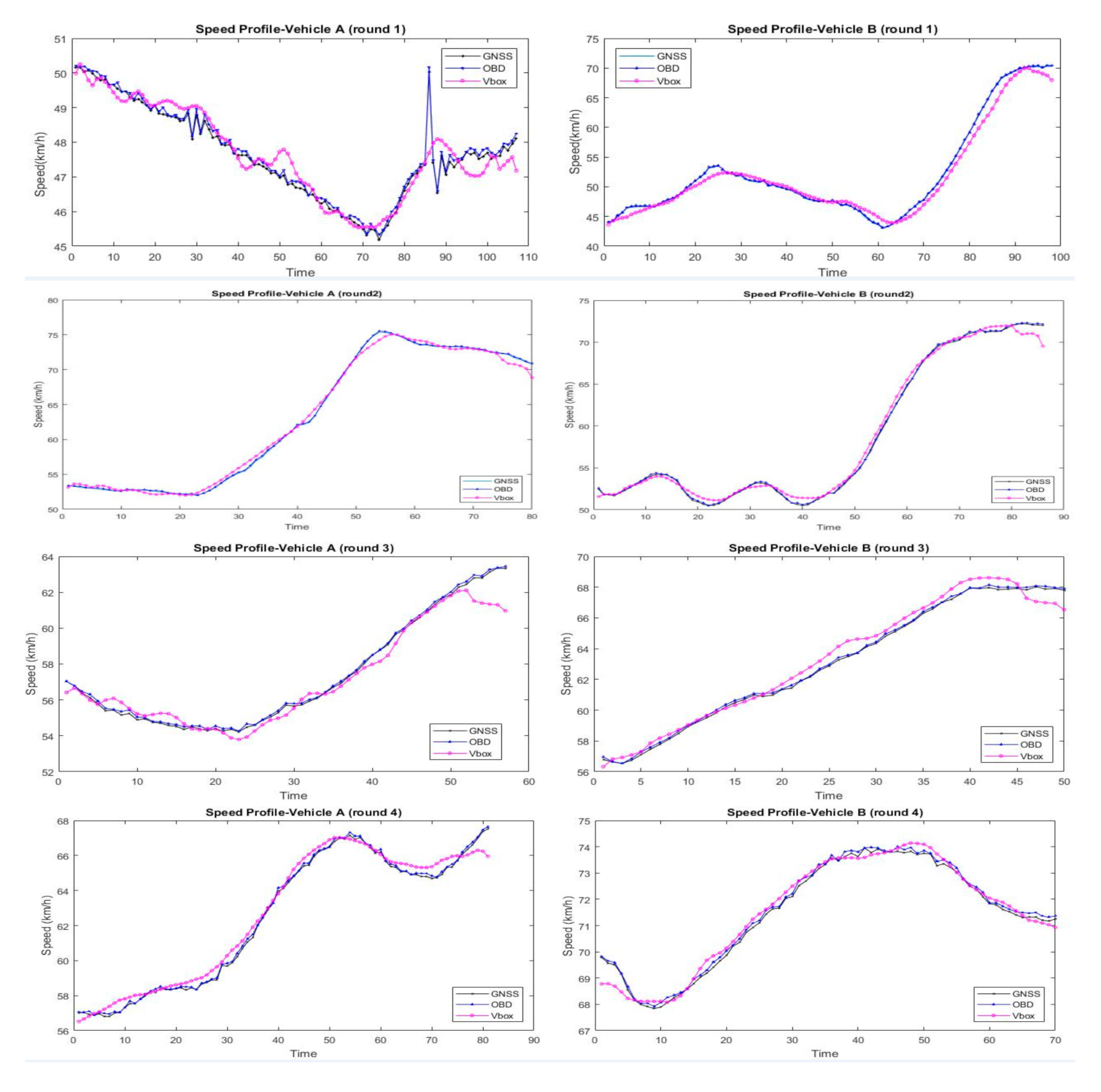
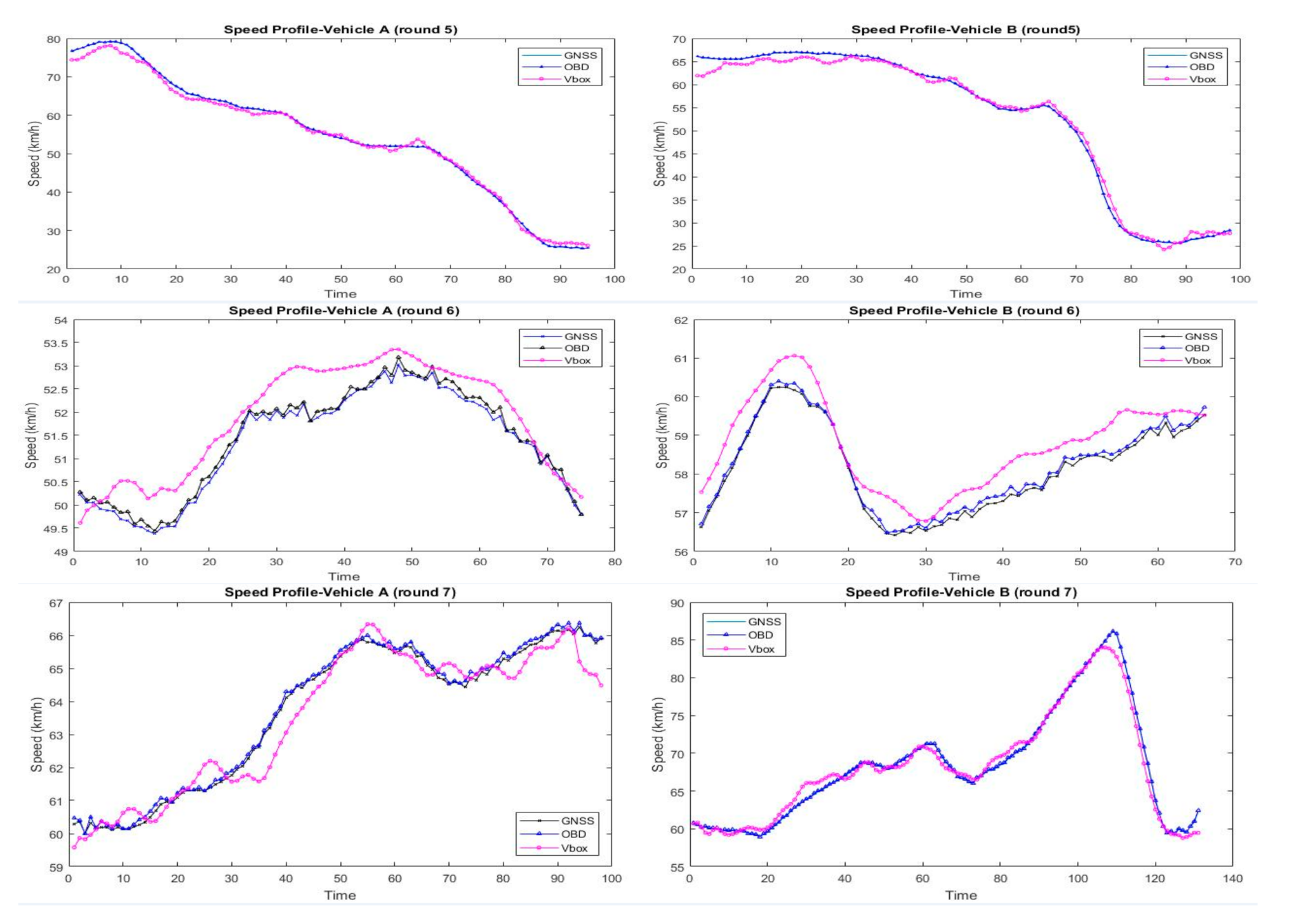
4.3. The Precision of Extracted Speed
5. Conclusions
- The accuracy of object detection and tracking of the proposed approach reached up to 90.88% and 98.9%, respectively. Compared with the traditional detection algorithms, vehicle recognition accuracy and robustness was improved.
- The absolute and relative error of extracted speed fell within ±3 km/h and 2%. The overall accuracy of the extracted parameters reached up to 98%. The reference sample obtained from the high-precision equipment (GNSS-RTK and OBD) proves the reliability and feasibility of the proposed approach.
- The proposed approach exhibited strong robustness and reliability. The validation experiments covered the different UAV height (150 m to 500 m) and different test vehicle speed (40 km/h to 90 km/h), but the accuracy of extracted data had little change.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Alessandretti, G.; Broggi, A.; Cerri, P. Vehicle and guard rail detection using radar and vision data fusion. IEEE Trans. Intell. Transp. Syst. 2007, 8, 95–105. [Google Scholar] [CrossRef] [Green Version]
- Ki, Y.K.; Baik, D.K. Vehicle-classification algorithm for single-loop detectors using neural networks. IEEE Trans. Veh. Technol. 2006, 55, 1704–1711. [Google Scholar] [CrossRef]
- Cheung, S.Y.; Varaiya, P.P. Traffic Surveillance by Wireless Sensor Networks. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2006. [Google Scholar]
- Bramberger, M.; Brunner, J.; Rinner, B.; Schwabach, H. Real-time video analysis on an embedded smart camera for traffic surveillance. In Proceedings of the RTAS 2004, 10th IEEE Real-Time and Embedded Technology and Applications Symposium, Toronto, ON, Canada, 25–28 May 2004; pp. 174–181. [Google Scholar]
- Zheng, J.; Liu, H.X. Estimating traffic volumes for signalized intersections using connected vehicle data. Transp. Res. Part C Emerg. Technol. 2017, 79, 347–362. [Google Scholar] [CrossRef] [Green Version]
- Masoud, N.; Jayakrishnan, R. Autonomous or driver-less vehicles: Implementation strategies and operational concerns. Transp. Res. Part E Logist. Transp. Rev. 2017, 108, 179–194. [Google Scholar] [CrossRef]
- Lei, T.; Claudel, C. Inertial Measurement Units-based probe vehicles: Path reconstruction and map matching. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2899–2904. [Google Scholar]
- Leitloff, J.; Rosenbaum, D.; Kurz, F.; Meynberg, O.; Reinartz, P. An operational system for estimating road traffic information from aerial images. Remote Sens. 2014, 6, 11315–11341. [Google Scholar] [CrossRef] [Green Version]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef] [Green Version]
- Hunt, E.R., Jr.; Daughtry, C.S. What good are unmanned aircraft systems for agricultural remote sensing and precision agriculture? Int. J. Remote. Sens. 2018, 39, 5345–5376. [Google Scholar] [CrossRef] [Green Version]
- Pai, H.; Malenda, H.F.; Briggs, M.A.; Singha, K.; González-Pinzón, R.; Gooseff, M.N. Potential for small unmanned aircraft systems applications for identifying groundwater-surface water exchange in a meandering river reach. Geophys. Res. Lett. 2017, 44, 11868–11877. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Chen, F.; Yin, H. Detecting and tracking vehicles in traffic by unmanned aerial vehicles. Autom. Constr. 2016, 72, 294–308. [Google Scholar] [CrossRef]
- Niu, H.; Gonzalez-Prelcic, N.; Heath, R.W. A UAV-based traffic monitoring system-invited paper. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar]
- Brooks, R.R.; Ramanathan, P.; Sayeed, A.M. Distributed target classification and tracking in sensor networks. Proc. IEEE 2003, 91, 1163–1171. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Tao, C.; Zou, Z.; Pan, H. A vehicle detection method taking shadow areas into account for high resolution aerial imagery. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 669–672. [Google Scholar]
- Ke, R.; Li, Z.; Kim, S.; Ash, J.; Cui, Z.; Wang, Y. Real-time bidirectional traffic flow parameter estimation from aerial videos. IEEE Trans. Intell. Transp. Syst. 2016, 18, 890–901. [Google Scholar] [CrossRef]
- Liu, Y.; Bai, B.; Zhang, C. UAV image mosaic for road traffic accident scene. In Proceedings of the 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Hefei, China, 19–21 May 2017; pp. 1048–1052. [Google Scholar]
- Beg, A.; Qureshi, A.R.; Sheltami, T.; Yasar, A. UAV-enabled intelligent traffic policing and emergency response handling system for the smart city. Pers. Ubiquitous Comput. 2021, 25, 33–50. [Google Scholar] [CrossRef]
- Liu, J.; Wu, J.; Liu, M. UAV monitoring and forecasting model in intelligent traffic oriented applications. Comput. Commun. 2020, 153, 499–506. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, J. To explore the UAV application in disaster prevention and reduction. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2014; Volume 590, pp. 609–612. [Google Scholar]
- Gu, X.; Abdel-Aty, M.; Xiang, Q.; Cai, Q.; Yuan, J. Utilizing UAV video data for in-depth analysis of drivers’ crash risk at interchange merging areas. Accid. Anal. Prev. 2019, 123, 159–169. [Google Scholar] [CrossRef]
- Pu, C. Link-quality and traffic-load aware routing for UAV ad hoc networks. In Proceedings of the 2018 IEEE 4th international Conference on Collaboration and Internet Computing (CIC), Philadelphia, PA, USA, 18–20 October 2018; pp. 71–79. [Google Scholar]
- Ke, R.; Li, Z.; Tang, J.; Pan, Z.; Wang, Y. Real-time traffic flow parameter estimation from UAV video based on ensemble classifier and optical flow. IEEE Trans. Intell. Transp. Syst. 2018, 20, 54–64. [Google Scholar] [CrossRef]
- Sakai, K.; Seo, T.; Fuse, T. Traffic density estimation method from small satellite imagery: Towards frequent remote sensing of car traffic. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, NZ, USA, 27–30 October 2019; pp. 1776–1781. [Google Scholar]
- Li, J.; Chen, S.; Zhang, F.; Li, E.; Yang, T.; Lu, Z. An adaptive framework for multi-vehicle ground speed estimation in airborne videos. Remote Sens. 2019, 11, 1241. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. Unmanned aerial vehicle-based traffic analysis: A case study for shockwave identification and flow parameters estimation at signalized intersections. Remote Sens. 2018, 10, 458. [Google Scholar] [CrossRef] [Green Version]
- Hao, Y.; Xu, L.; Wang, X.; Li, Y.; Chen, G. Aggressive Lane-change Analysis Closing to Intersection Based on UAV Video and Deep Learning. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; pp. 496–502. [Google Scholar]
- Ahmed, A.; Ngoduy, D.; Adnan, M.; Baig, M.A.U. On the fundamental diagram and driving behavior modeling of heterogeneous traffic flow using UAV-based data. Transp. Res. Part A Policy Pract. 2021, 148, 100–115. [Google Scholar] [CrossRef]
- Weber, K.; Heweling, G.; Fischer, C.; Lange, M. The use of an octocopter UAV for the determination of air pollutants—A case study of the traffic induced pollution plume around a river bridge in Duesseldorf, Germany. Int. J. Educ. Learn. Syst. 2017, 2, 63–66. [Google Scholar]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer Science & Business Media: Berlin, Germany, 2010. [Google Scholar]
- Lingua, A.; Marenchino, D.; Nex, F. Performance analysis of the SIFT operator for automatic feature extraction and matching in photogrammetric applications. Sensors 2009, 9, 3745–3766. [Google Scholar] [CrossRef]
- Rahman, M.A.; Wang, Y. Optimizing intersection-over-union in deep neural networks for image segmentation. In Proceedings of the International Symposium on Visual Computing, San Diego, CA, USA, 5–7 October 2016; Springer: Cham, Switzerland, 2016; pp. 234–244. [Google Scholar]
- Rodríguez-Canosa, G.R.; Thomas, S.; Del Cerro, J.; Barrientos, A.; MacDonald, B. A real-time method to detect and track moving objects (DATMO) from unmanned aerial vehicles (UAVs) using a single camera. Remote. Sens. 2012, 4, 1090–1111. [Google Scholar] [CrossRef] [Green Version]
- Cao, X.; Gao, C.; Lan, J.; Yuan, Y.; Yan, P. Ego motion guided particle filter for vehicle tracking in airborne videos. Neurocomputing 2014, 124, 168–177. [Google Scholar] [CrossRef]
- Cao, X.; Wu, C.; Yan, P.; Li, X. Linear SVM classification using boosting HOG features for vehicle detection in low-altitude airborne videos. In Proceedings of the 2011 18th IEEE International Conference on Image Processing, Brussels, Belgium, 11–14 September 2011; pp. 2421–2424. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed tracking with kernelized correlation filters. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 37, 583–596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Jiang, X.; Hadid, A.; Pang, Y.; Granger, E. Deep Learning in Object Detection and Recognition; Springer: Singapore, 2020. [Google Scholar]
- Zhu, J.; Sun, K.; Jia, S.; Li, Q.; Hou, X.; Lin, W.; Qiu, G. Urban traffic density estimation based on ultrahigh-resolution UAV video and deep neural network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4968–4981. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Hu, Y.; Wu, X.; Zheng, G.; Liu, X. Object detection of UAV for anti-UAV based on improved YOLO v3. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 8386–8390. [Google Scholar]
- Tuermer, S.; Kurz, F.; Reinartz, P.; Stilla, U. Airborne vehicle detection in dense urban areas using HoG features and disparity maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2327–2337. [Google Scholar] [CrossRef]
- Umbaugh, S.E. Digital Image Processing and Analysis: Human and Computer Vision Applications with CVIPtools; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Nagabhushana, S. Computer Vision and Image Processing; New Age International: North Delhi, India, 2005. [Google Scholar]
- Babenko, B.; Yang, M.H.; Belongie, S. Robust object tracking with online multiple instance learning. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 1619–1632. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Andrew, A.M. Multiple view geometry in computer vision. Kybernetes 2001, 30, 1333–1341. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title 1 | Title 2 |
|---|---|
| Weight | 1375 g |
| Maximum wind speed | 10 m/s |
| Maximum take-off altitude | 6000 m |
| Operative temperature | From 0 °C to 40 °C |
| Maximum flight time | 30 min |
| Hovering precision | Vertical: ±0.1 m, Horizontal: ±0.3 m |
| Camera resolution | 3840 × 2160 24/25/30p @ 100 Mbps |
| Number | Appearance Time of Test Vehicle (s) | Test Vehicle Speed (km/h) | UAV Height (m) | The Test Segment Length (m) |
|---|---|---|---|---|
| 1 | 24 | 40~70 | 200 | 285 |
| 2 | 20 | 50~80 | 210 | 300 |
| 3 | 35 | 50~70 | 200 | 285 |
| 4 | 30 | 50~80 | 200 | 285 |
| 5 | 25 | 30~80 | 150 | 220 |
| 6 | 26 | 50~60 | 250 | 360 |
| 7 | 30 | 50~90 | 350 | 500 |
| GT | TP | FP | FN | Recall | Precision | AP |
|---|---|---|---|---|---|---|
| 5030 | 4975 | 1 | 55 | 98.9% | 99.9% | 90.88% |
| GTt | FPt | FNt | IDSW | MOTA | MOTP |
|---|---|---|---|---|---|
| 5090 | 1 | 55 | 0 | 98.9 | 98.8 |
| Test Group | Test Vehicle-A | Test Vehicle-B | ||||||
|---|---|---|---|---|---|---|---|---|
| Sample | Average Speed (km/h) | Maximum Absolute Error (km/h) | Maximum Relative Error | Sample | Average Speed (km/h) | Maximum Absolute Error (km/h) | Maximum Relative Error | |
| 1 | 107 | 47.65 | 2.33 | 0.63% | 98 | 52.22 | 2.99 | 1.58% |
| 2 | 80 | 62.96 | 1.95 | 0.67% | 86 | 58.62 | 2.47 | 0.80% |
| 3 | 57 | 57.29 | 2.36 | 0.72% | 50 | 63.02 | 1.27 | 0.77% |
| 4 | 81 | 62.41 | 1.56 | 0.60% | 70 | 71.43 | 1.01 | 0.32% |
| 5 | 95 | 54.67 | 2.72 | 1.64% | 98 | 52.79 | 2.95 | 1.55% |
| 6 | 75 | 51.33 | 1.13 | 1.06% | 66 | 58.15 | 1.11 | 1.09% |
| 7 | 98 | 63.68 | 1.42 | 0.63% | 131 | 68.17 | 2.93 | 1.12% |
| Total | 593 | 57.14 | 2.72 | 0.85% | 599 | 60.63 | 2.99 | 1.03% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, D.; Lei, T.; Yin, X.; Luo, Q.; Gong, L. Extracting Key Traffic Parameters from UAV Video with On-Board Vehicle Data Validation. Sensors 2021, 21, 5620. https://doi.org/10.3390/s21165620
Shan D, Lei T, Yin X, Luo Q, Gong L. Extracting Key Traffic Parameters from UAV Video with On-Board Vehicle Data Validation. Sensors. 2021; 21(16):5620. https://doi.org/10.3390/s21165620
Chicago/Turabian StyleShan, Donghui, Tian Lei, Xiaohong Yin, Qin Luo, and Lei Gong. 2021. "Extracting Key Traffic Parameters from UAV Video with On-Board Vehicle Data Validation" Sensors 21, no. 16: 5620. https://doi.org/10.3390/s21165620
APA StyleShan, D., Lei, T., Yin, X., Luo, Q., & Gong, L. (2021). Extracting Key Traffic Parameters from UAV Video with On-Board Vehicle Data Validation. Sensors, 21(16), 5620. https://doi.org/10.3390/s21165620