
Robustness against Chirp Signal Interference of On-Board Vehicle Geodetic and Low-Cost GNSS Receivers



Abstract
:1. Introduction
1.1. Overview
1.2. Paper Focus and Outline
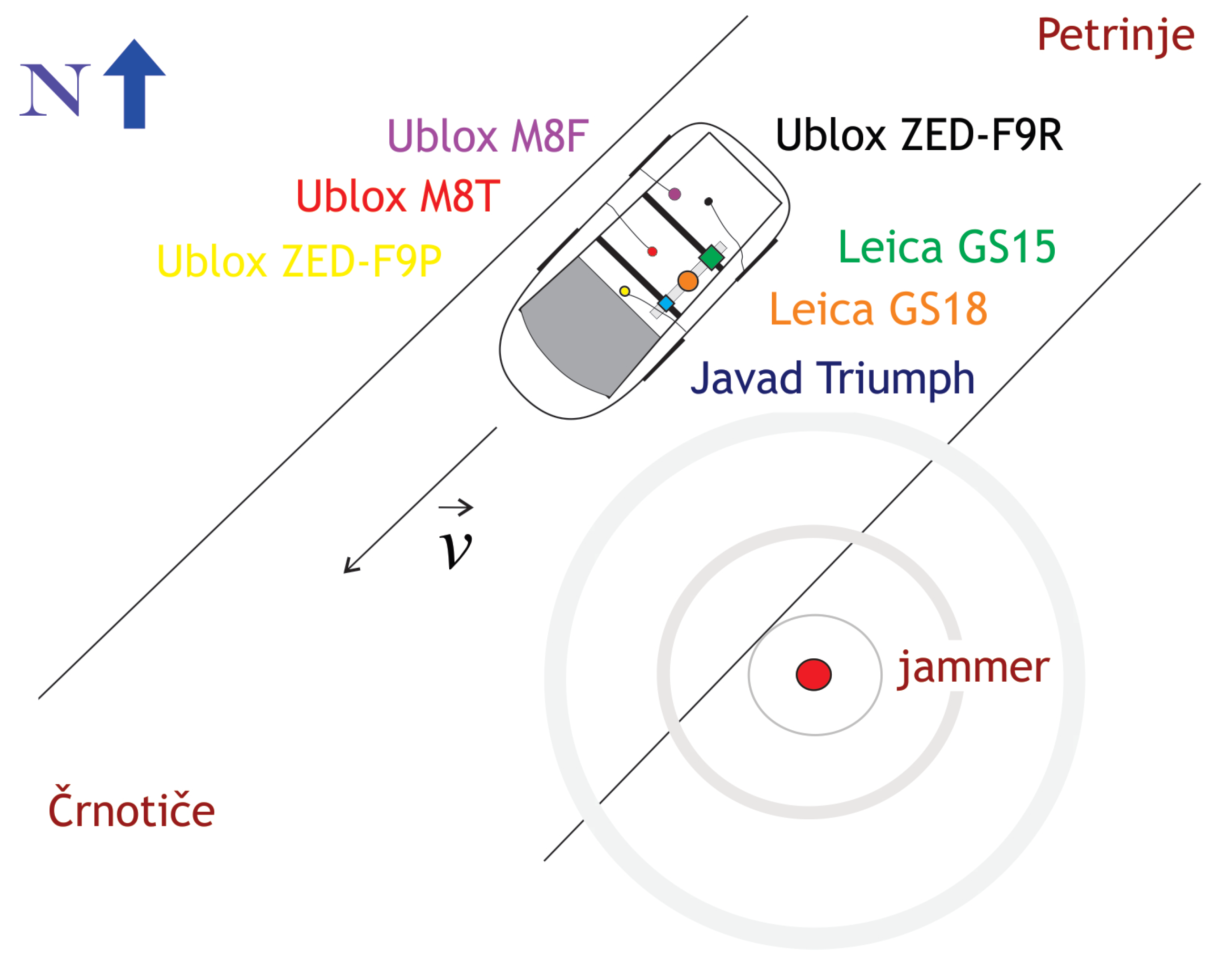
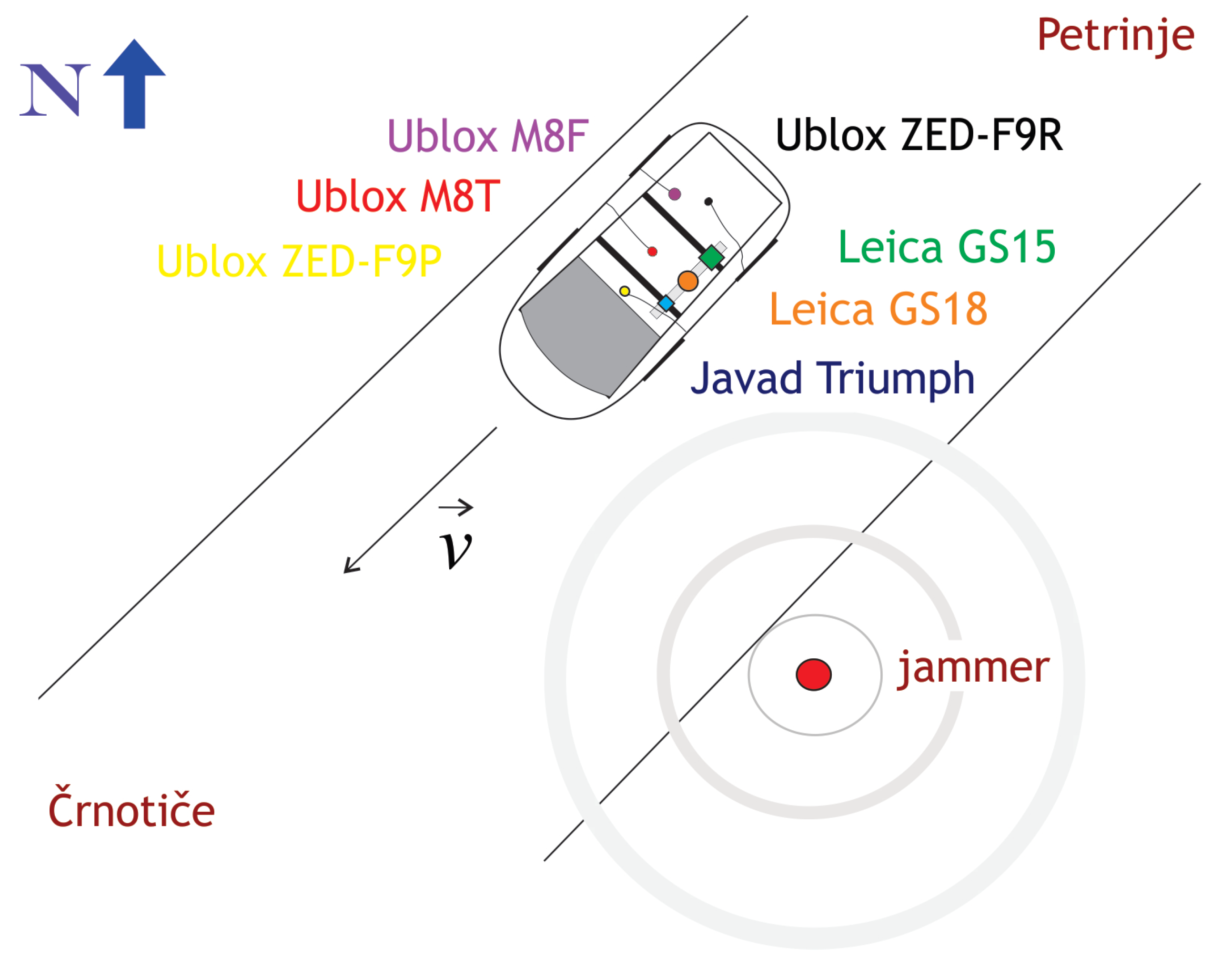
- The effect of static jamming, where a jammer is placed at different heights and a vehicle with receivers passes the jammer at a constant speed;
- The quality of signal reception and the re-acquisition time after jamming for different receivers.
2. Materials and Methods
2.1. Setup and Measurement Campaign
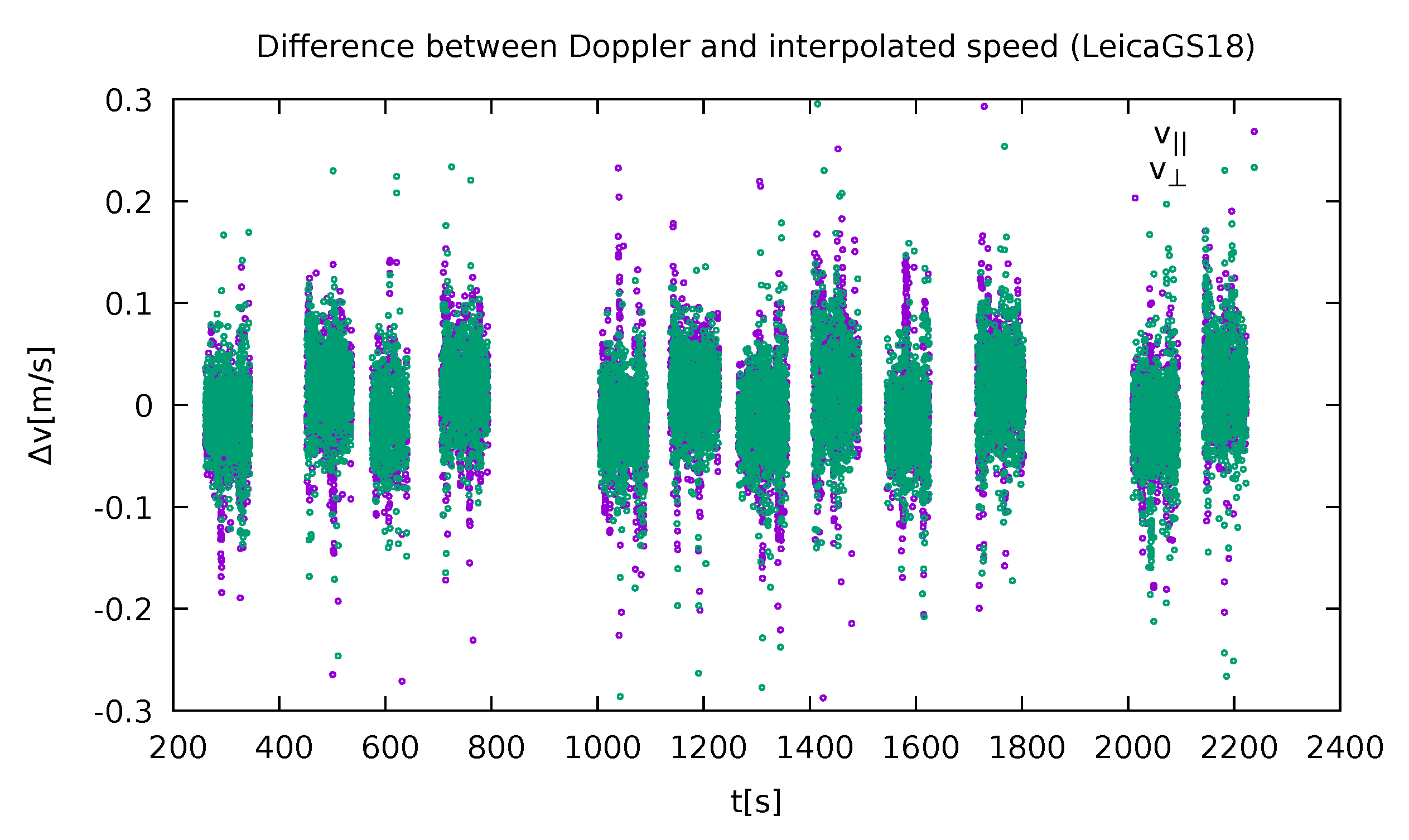
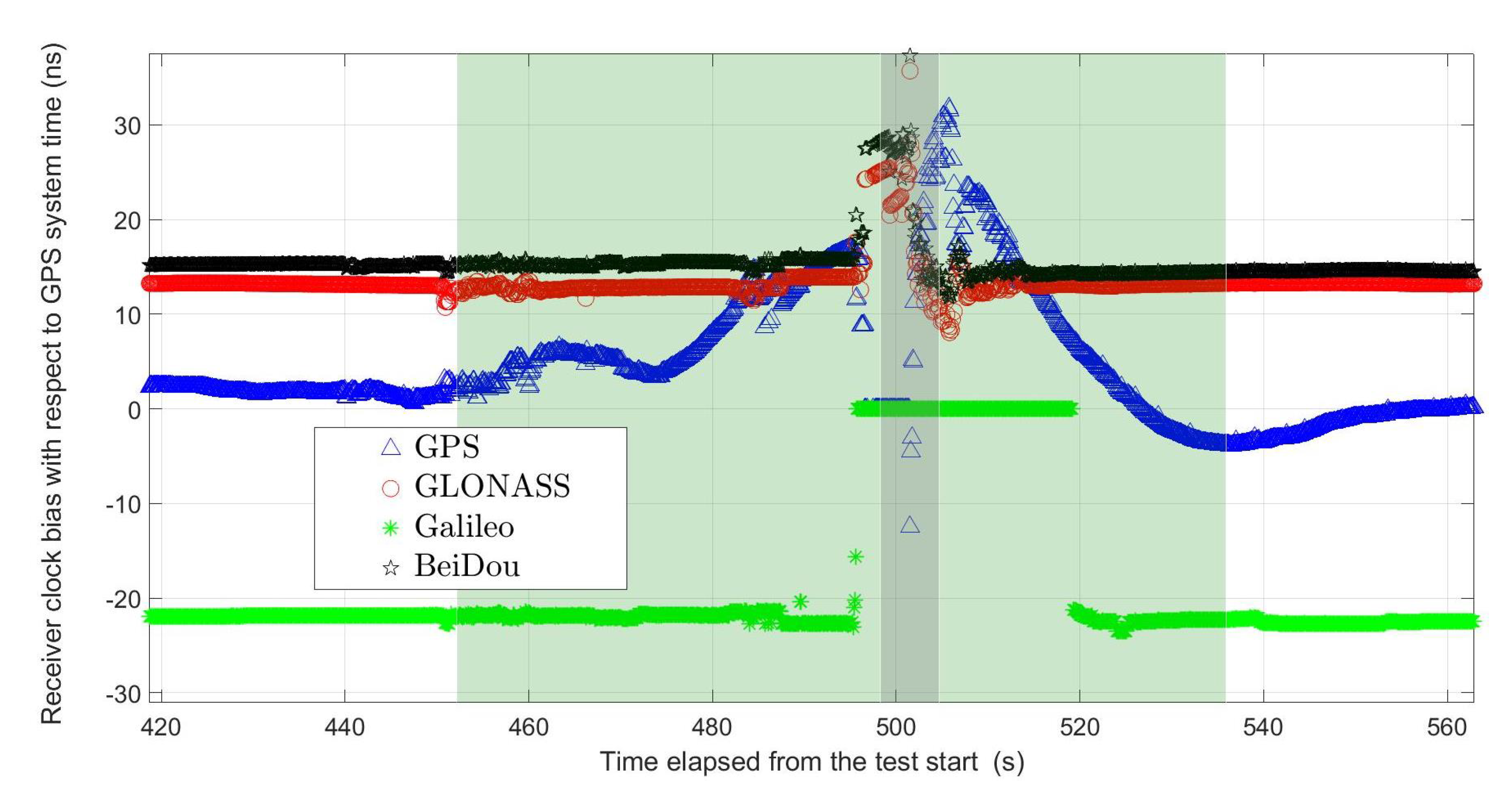
2.2. Observation Processing
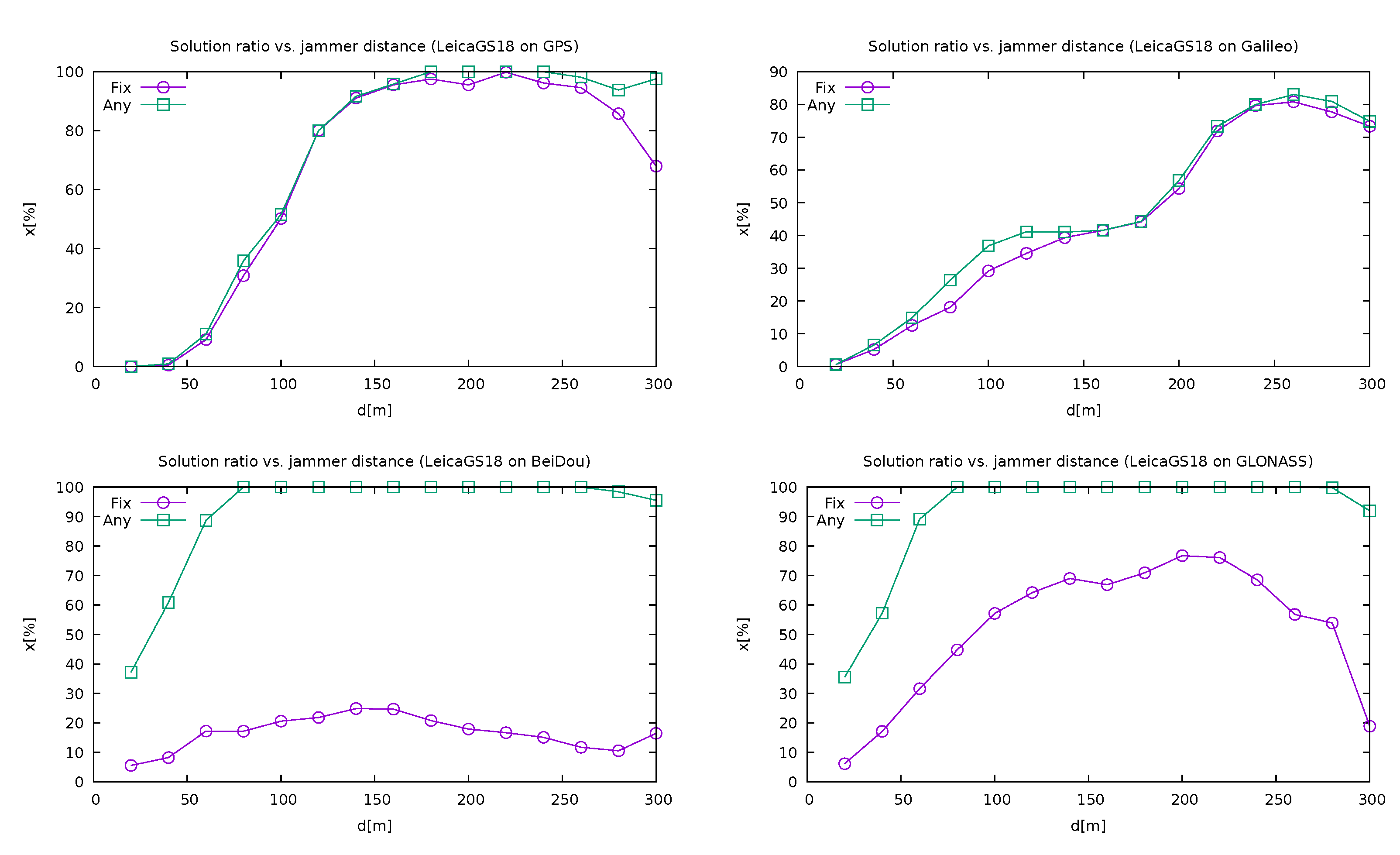
- Separately for each satellite system constellation, namely GPS, GLONASS, Galileo and BeiDou;
- For different combinations of constellations, namely GPS+GLONASS, GPS+Galileo, etc.
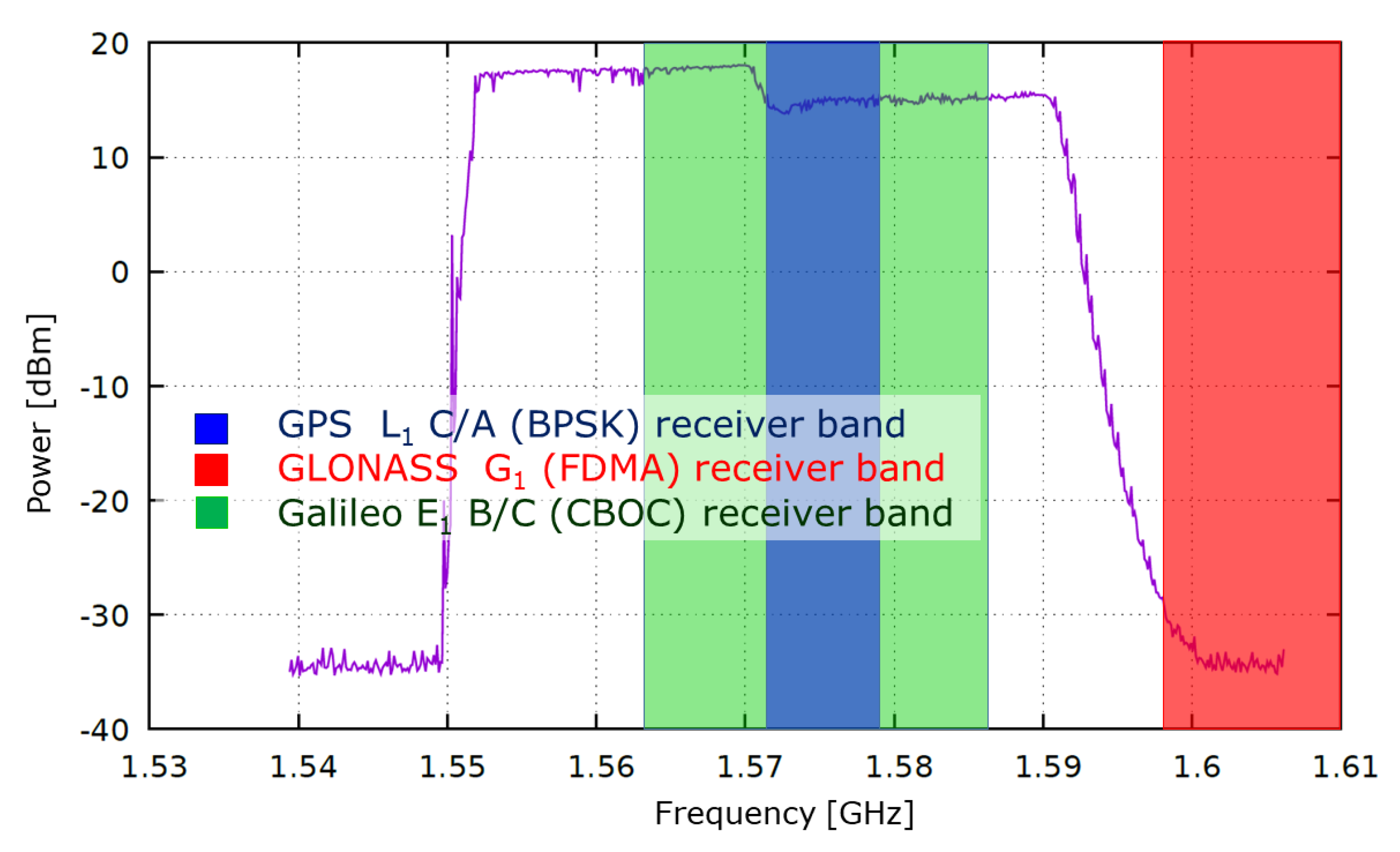
2.3. Jamming Detection and Quality of Mitigation
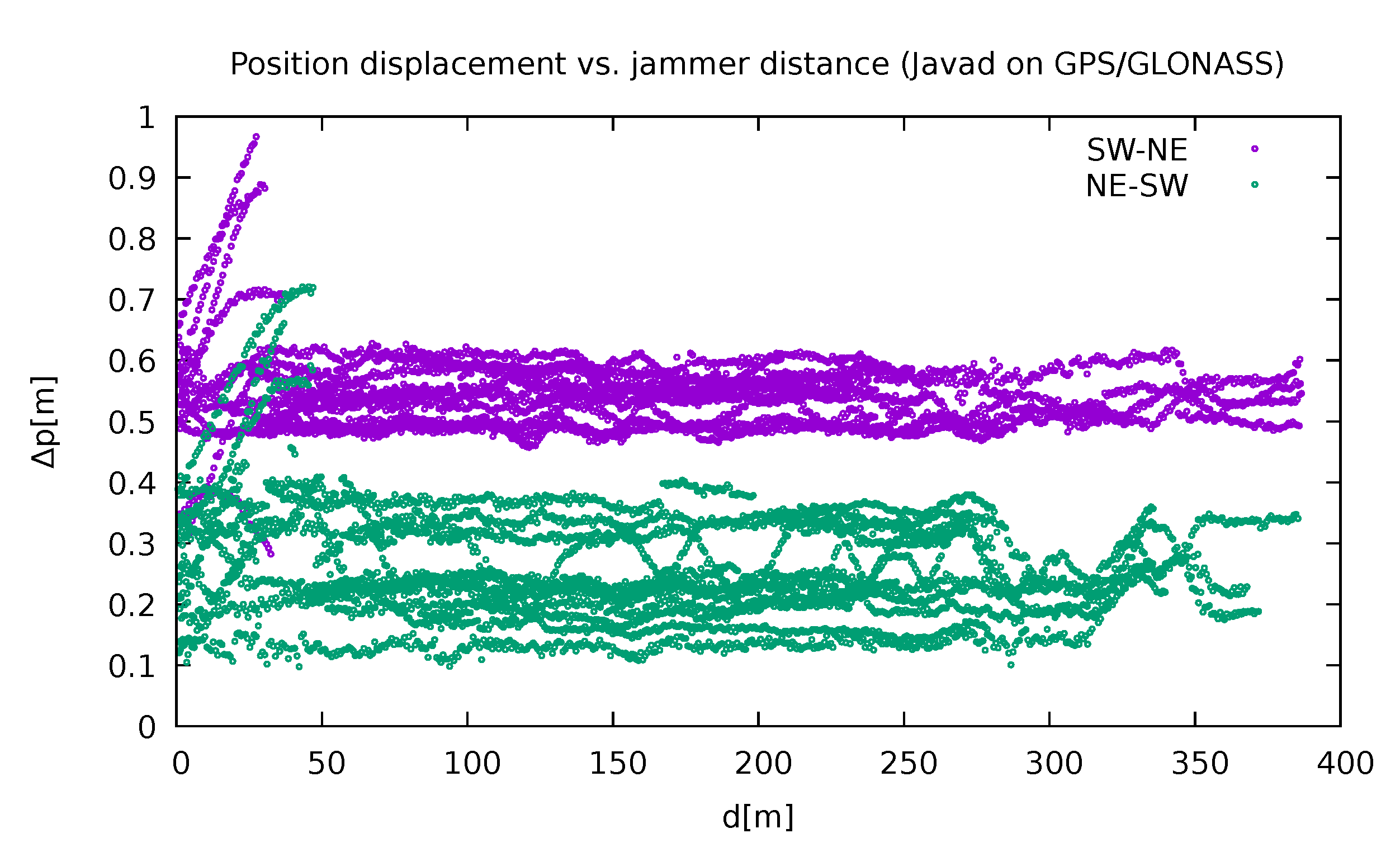
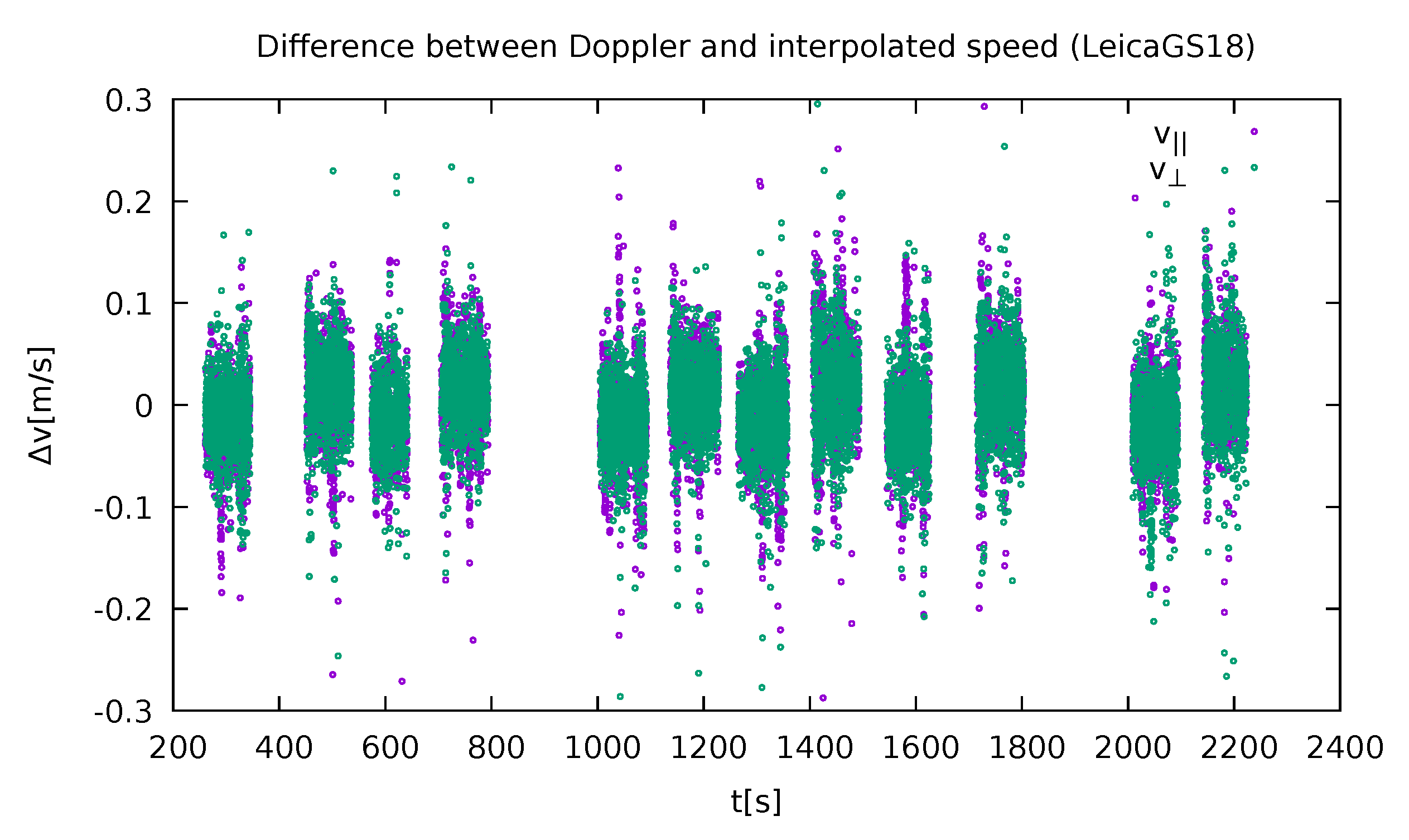
2.4. Position Determination
3. Results and Discussion
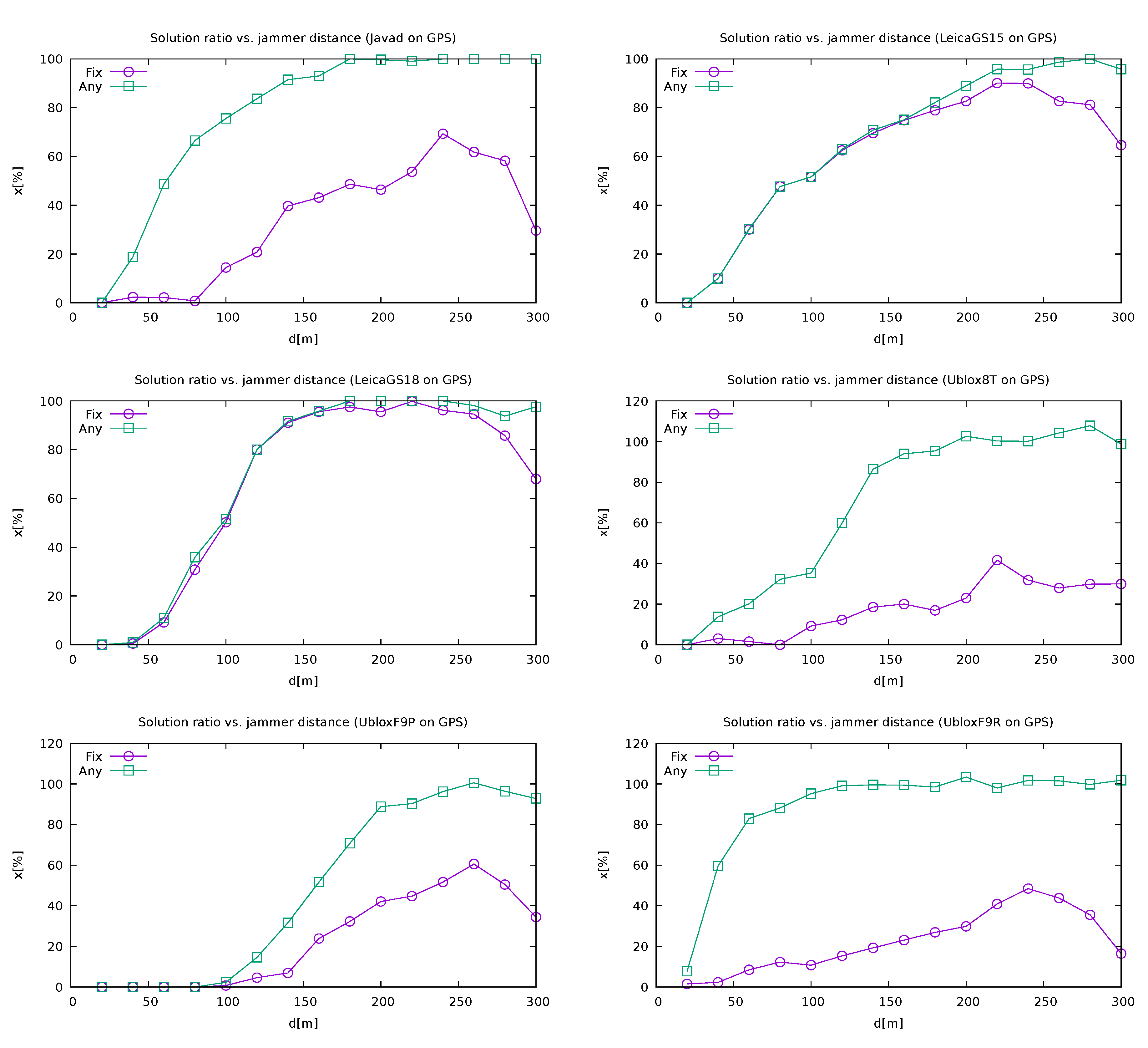
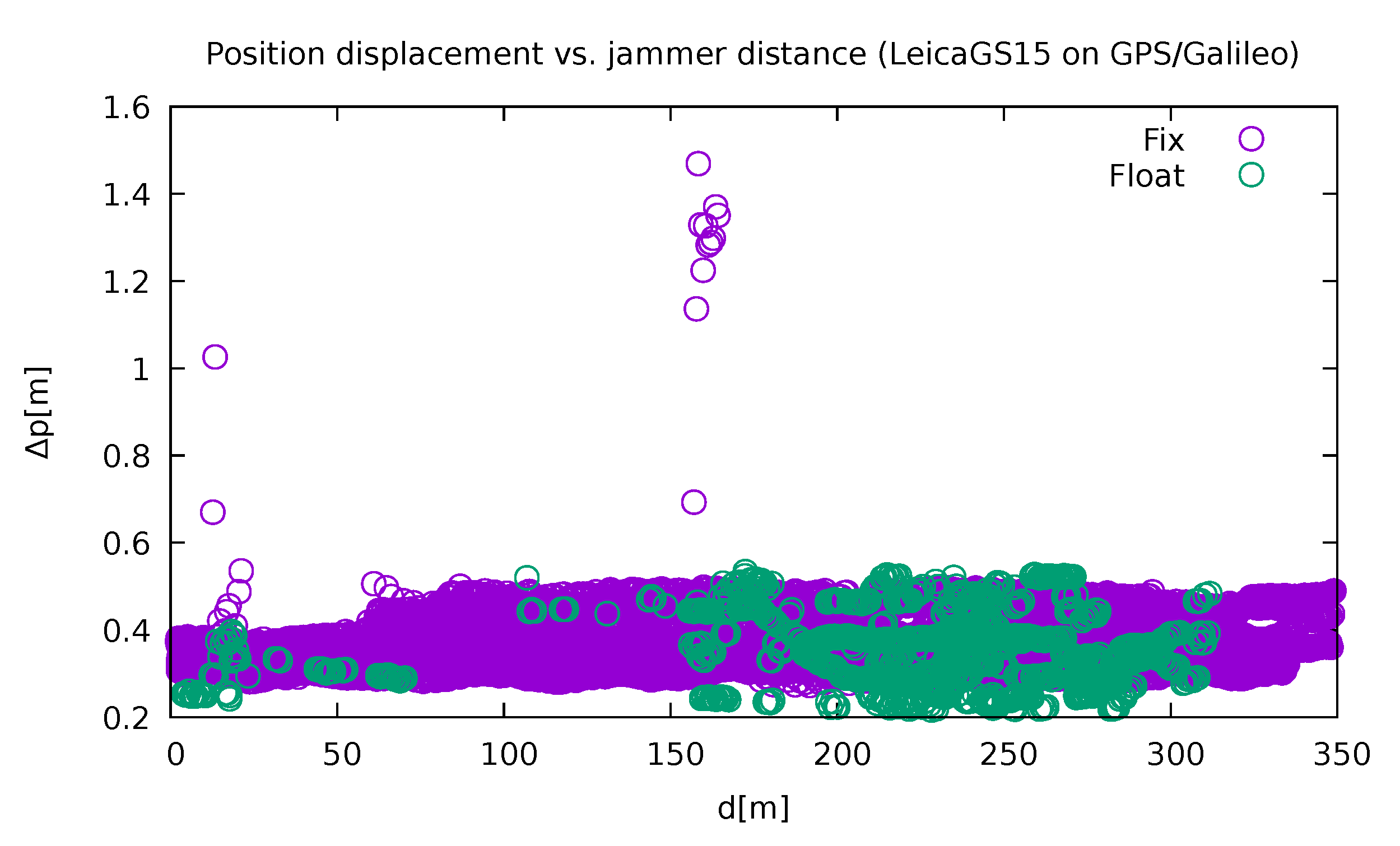
3.1. Reported Solution Quality
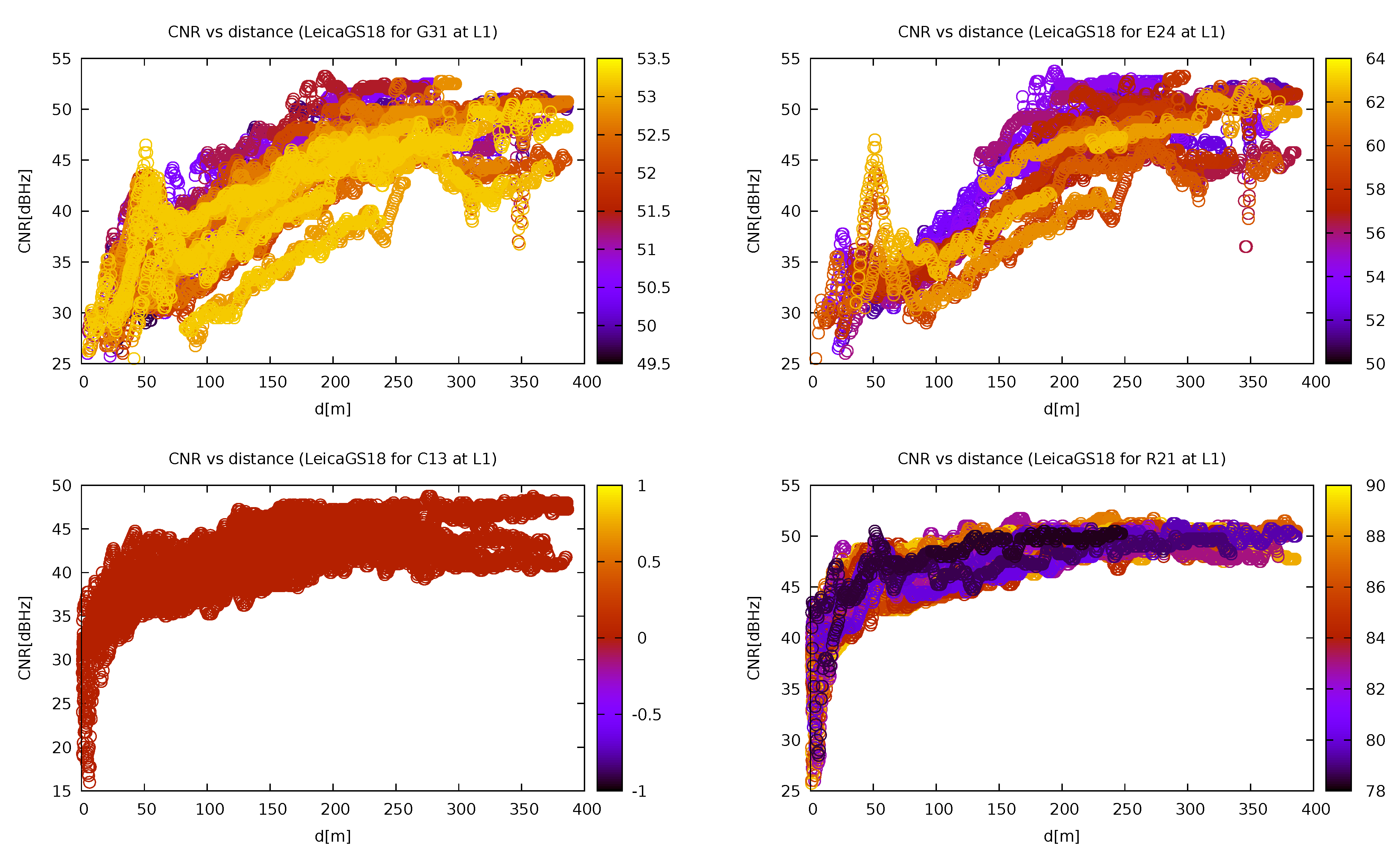
3.2. Carrier-to-Noise Ratio
3.3. Recovery from Jamming
4. Conclusions
- All of the receivers’ reported positions fluctuated around a few values that eventually changed during the experiment;
- The presented referencing method does not perform well in areas where the position is non-predictable (e.g., turns and non-uniform speed);
- The actual GLONASS constellation was not optimal, due to the lack of satellites of high elevation (above 40 degrees);
- From the observed CNR dependence, it can be safely assumed that none of the used instruments has any effective type of mitigation technique adapted to the chirp jammer.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AKOS | Agency for Communication Networks and Services of the Republic of Slovenia |
| CORS | Continuously Operating Reference Station |
| C/N0 | Carrier-to-Noise density |
| CNR | Carrier-to-Noise Ratio |
| GLONASS | Russian: Globalnaya Navigatsionnaya Sputnikovaya Sistema |
| GNSS | Global Navigation Satellite Systems |
| GPS | Global Positioning System |
| RINEX | Receiver Independent Exchange Format |
| RIMS | Ranging and Integrity Monitoring Station |
| RTK | Real Time Kinematic |
| UTC | Coordinated Universal Time |
| SIGNAL | SI-Geodesy-Navigation-And-Location |
| STRIKE3 | Standardisation of GNSS Threat reporting and Receiver testing through |
| International Knowledge Exchange, Experimentation and Exploitation |
References
- Borio, D.; Gioia, C. GNSS interference mitigation: A measurement and position domain assessment. Navigation 2021, 68, 93–114. [Google Scholar] [CrossRef]
- Amin, M.G.; Borio, D.; Zhang, Y.D.; Galleani, L. Time-Frequency Analysis for GNSSs: From interference mitigation to system monitoring. IEEE Signal Process. Mag. 2017, 34, 85–95. [Google Scholar] [CrossRef]
- Kuusniemi, H.; Airos, E.; Bhuiyan, M.Z.H.; Kröger, T. Effects of GNSS Jammers on Consumer Grade Satellite Navigation Receivers. In Proceedings of the European Navigation Conference, Gdansk, Poland, 25–27 April 2012; pp. 1–14. [Google Scholar]
- Glomsvoll, O.; Bonenberg, L.K. GNSS Jamming Resilience for Close to Shore Navigation in the Northern Sea. J. Navig. 2017, 70, 33–48. [Google Scholar] [CrossRef] [Green Version]
- Zhu, N.; Marais, J.; Bétaille, D.; Berbineau, M. GNSS Position Integrity in Urban Environments: A Review of Literature. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2762–2778. [Google Scholar] [CrossRef] [Green Version]
- Elghamrawy, H.; Karaim, M.; Tamazin, M.; Noureldin, A. Experimental Evaluation of the Impact of Different Types of Jamming Signals on Commercial GNSS Receivers. Appl. Sci. 2020, 10, 4240. [Google Scholar] [CrossRef]
- Uhrich, P.; Abgrall, M.; Riedel, F.; Chupin, B.; Achkar, J.; Rovera, G.D. A Poweful Signal nearby L1 Frequency Band Jamming GNSS Stations in Observatoire de Paris. ITU J. ICT Discov. 2019, 2. Available online: https://www.itu.int/dms_pub/itu-s/opb/journal/S-JOURNAL-ICTF.VOL2-2019-1-P01-PDF-E.pdf (accessed on 23 April 2021).
- Park, K.W.; Lee, M.J.; Park, C. A Design of Anti-jamming Method Based on Spectrum Sensing and GNSS Software Defined Radio. In Proceedings of the International Symposium on Global Navigation Satellite System 2018 (ISGNSS 2018), Bali, Indonesia, 21–23 November 2018; Wijaya, D.D., Ed.; E3S Web of Conferences. 2018; Volume 94, p. 03004. [Google Scholar] [CrossRef]
- Dovis, F.; Musumeci, L.; Motella, B.; Faletti, E. Classification of Interferring Sources and Analysis of the Effects on GNSS Receivers. In GNSS Interference Threats and Countermeasures; Dovis, F., Ed.; Artech House: Norwood, MA, USA, 2015; pp. 31–65. [Google Scholar]
- Gao, G.X.; Heng, L.; Hornbostel, A.; Denks, H.; Meurer, M.; Walter, T.; Enge, P. DME/TACAN interference mitigation for GNSS: Algorithms and flight test results. GPS Solut. 2006, 17, 561–573. [Google Scholar] [CrossRef]
- Gao, G.X.; Sgammini, M.; Lu, M.; Kubo, N. Protecting GNSS receivers from jamming and interference. Proc. IEEE 2016, 104, 1327–1338. [Google Scholar] [CrossRef]
- Borio, D.; Camoriano, L.; Mulassano, P. Analysis of the one-pole notch filter for interference mitigation: Wiener solution and loss estimations. In Proceedings of the 19th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2006), Fort Worth, TX, USA, 26–29 September 2006; pp. 1849–1860. [Google Scholar]
- Jang, J.; Paonni, M.; Eissfeller, B. CW Interference Effects on Tracking Performance of GNSS Receivers. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 243–258. [Google Scholar] [CrossRef]
- Giordanengo, G. Impact of Notch Filtering on Tracking Loops for GNSS Applications. Ph.D. Thesis, Politecnico di Torino, Torino, Italy, 2009. Available online: https://schulich.ucalgary.ca/labs/position-location-and-navigation/files/position-location-and-navigation/giordanengo2009_phd.pdf (accessed on 25 April 2021).
- Raasakka, J.; Orejas, M. Analysis of notch filtering methods for narrowband interference mitigation. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2014; pp. 1282–1292. Available online: https://doi.org/10.1109/PLANS.2014.6851503 (accessed on 25 April 2021).
- Di Grazia, D.; Cardineau, D.; Pisoni, F. A NAVIC enabled hardware receiver for the Indian mass market. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, September 2019; pp. 189–199. Available online: https://doi.org/10.33012/2019.16979 (accessed on 25 April 2021).
- Qin, W.; Dovis, F.; Troglia Gamba, M.; Falletti, E. A comparison of optimized mitigation techniques for swept-frequency jammers. In Proceedings of the International Technical Meeting of The Institute of Navigation, Reston, VA, USA, 28–31 January 2019; pp. 233–247. [Google Scholar] [CrossRef] [Green Version]
- Wendel, J.; Schubert, F.M.; Rügamer, A.; Taschke, S. Limits of narrowband interference mitigation using adaptive notch filters. In Proceedings of the 29th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 286–294. [Google Scholar] [CrossRef]
- Vagle, N.; Broumandan, A.; Lachapelle, G. Analysis of multi-antenna GNSS receiver performance under jamming attacks. Sensors 2016, 16, 1937. [Google Scholar] [CrossRef] [Green Version]
- Borio, D. A multi-state notch filter for GNSS jamming mitigation. In Proceedings of the International Conference on Localization and GNSS 2014 (ICL-GNSS 2014), Helsinki, Finland, 24–26 June 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Susi, M.; Borio, D. Kalman filtering with noncoherent integrations for Galileo E6-B tracking. Navig. J. Inst. Navig. 2020, 67, 601–617. [Google Scholar] [CrossRef]
- Cortés, I.; van der Merwe, J.R.; Nurmi, J.; Rügamer, A.; Felber, W. Evaluation of Adaptive Loop-Bandwidth Tracking Techniques in GNSS Receivers. Sensors 2021, 21, 502. [Google Scholar] [CrossRef]
- STRIKE3. Standardisation of GNSS Threat Reporting and Receiver Testing through International Knowledge Exchange, Experimentation and Exploitation. Available online: https://www.gsa.europa.eu/standardisation-gnss-threat-reporting-and-receiver-testing-through-international-knowledge-exchange (accessed on 12 April 2021).
- Pattinson, M.; Lee, S.; Bhuiyan, Z.; Thombre, S.; Manikundalam, V.; Hill, S. STRIKE3 Consortium: Draft Standards for Receiver Testing against Threats. Available online: http://aric-aachen.de/strike3/downloads/STRIKE3_D42_Test_Standards_v2.0.pdf (accessed on 25 April 2021).
- Arnold, D. GNSS Jamming and How to Mitigate it. Available online: https://blog.meinbergglobal.com/2020/04/12/gnss-jamming-and-how-to-mitigate-it/ (accessed on 25 April 2021).
- Pavlovčič-Prešeren, P.; Dimc, F.; Bažec, M. A Comparative Analysis of the Response of GNSS Receivers under Vertical and Horizontal L1/E1 Chirp Jamming. Sensors 2021, 21, 1446. [Google Scholar] [CrossRef]
- Bažec, M.; Dimc, F.; Pavlovčič-Prešeren, P. Evaluating the Vulnerability of Several Geodetic GNSS Receivers under Chirp Signal L1/E1 Jamming. Sensors 2020, 20, 814. [Google Scholar] [CrossRef] [Green Version]
- Wendel, J.; Kurzhals, C.; Houdek, M.; Samson, J. An Interference Monitoring System for GNSS Reference Stations. In Proceedings of the 26th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Tampa, FL, USA, 16–20 September 2013; pp. 3391–3398. [Google Scholar]
- Dimc, F.; Bažec, M.; Borio, D.; Gioia, C.; Baldini, G.; Basso, M. An Experimental Evaluation of Low-Cost GNSS Jamming Sensors. Navigation 2017, 64, 93–109. [Google Scholar] [CrossRef]
- U-blox ZED-F9P. Available online: https://www.u-blox.com/sites/default/files/ZED-F9P_DataSheet_%28UBX-17051259%29.pdf (accessed on 12 April 2021).
- Everett, T. Building a Simple U-blox F9P Data Logger with a Sparkfun OpenLog Board. Available online: https://rtklibexplorer.wordpress.com/2019/10/25/building-a-simple-u-blox-f9p-data-logger-with-a-sparkfun-openlog-board/ (accessed on 12 April 2021).
- Borio, D.; Fortuny Guasch, J.; O’Driscoll, C. Characterization of GNSS Jammers. Coordinates 2013, IX, 8–16. [Google Scholar]
- Borio, D.; Gioia, C.; Baldini, G. Asynchronous pseudolite navigation using C/N0 measurements. J. Navig. 2016, 69, 639–658. [Google Scholar] [CrossRef] [Green Version]
- Lineswala, P.L.; Shah, S.N. Review of NavIC signals under class II jamming based on power and auto-correlation function monitoring. Acta Geod. Geophys. 2019, 54, 359–371. [Google Scholar] [CrossRef]
- Thombre, S.; Bhuiyan, M.Z.H.; Eliardsson, P.; Gabrielsson, B.; Pattinson, M.; Dumville, M.; Fryganiotis, D.; Hill, S.; Manikundalam, V.; Pölöskey, M.; et al. GNSS Threat Monitoring and Reporting: Past, Present, and a Proposed Future. J. Navig. 2018, 71, 513–529. [Google Scholar] [CrossRef] [Green Version]
- Everett, T. RTKLIB Demo5_b33e. Available online: http://rtkexplorer.m/downloads/rtklib-code/ (accessed on 6 December 2020).
- Takasu, T. RTKLIB: An Open Source Program Package for GNSS Positioning. Available online: http://rtklib.com/ (accessed on 20 March 2021).
- Kubo, N.; Kobayashi, K.; Furukawa, R. GNSS multipath detection using continuous time-series C/N0. Sensors 2020, 20, 4059. [Google Scholar] [CrossRef]
- Zuo, X.; Bu, J.; Li, X.; Chang, J.; Li, X. The quality analysis of GNSS satellite positioning data. Cluster Comput. 2019, 22, 6693–6708. [Google Scholar] [CrossRef]
- Joseph, A. Measuring GNSS Signal Strength. Inside GNSS 2010, 5, 20–25. [Google Scholar]
- Axell, E.; Eklöf, F.M.; Johansson, P.; Alexandersson, M.; Akos, D.M. Jamming detection in GNSS receivers: Performance evaluation of field trials. Navig. J. Inst. Navig. 2015, 62, 73–82. [Google Scholar] [CrossRef]
- Zhang, J.; Cui, X.; Xu, H.; Lu, M. A two-stage interference suppression scheme based on antenna array for GNSS jamming and spoofing. Sensors 2019, 19, 3870. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dimc, F.; Pavlovčič-Prešeren, P.; Bažec, M. Detailed Measurement Results. Available online: https://gnss.fpp.uni-lj.si/2021-03-19/ (accessed on 27 April 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point Name | B-Latitude | L-Longitude | H [m] |
|---|---|---|---|
| Črnotiče (C) | 453340.078 N | 135329.889 E | 439.90 |
| jammer (J) | 453349.124 N | 135338.248 E | 435.49 |
| Petrinje (P) | 453401.064 N | 135348.894 E | 433.91 |
| No. of Drive | Vehicle Speed | Direction | Start (UTC) | End (UTC) |
|---|---|---|---|---|
| 1 | 30 km/h | J–C | 14:07:20 | 14:07:50 |
| 2 | 30 km/h | C–P | 14:09:10 | 14:10:50 |
| 3 | 30 km/h | P–C | 14:12:25 | 14:14:05 |
| 4 | 30 km/h | C–P | 14:14:25 | 14:16:05 |
| 5 | 30 km/h | P–C | 14:16:40 | 14:18:20 |
| 6 | 30 km/h | C–P | 14:21:35 | 14:23:15 |
| 7 | 30 km/h | P–C | 14:23:55 | 14:25:35 |
| 8 | 30 km/h | C–P | 14:26:00 | 14:27:40 |
| 9 | 30 km/h | P–C | 14:28:15 | 14:29:55 |
| 10 | 30 km/h | C–P | 14:30:40 | 14:32:20 |
| 11 | 30 km/h | P–C | 14:34:30 | 14:36:10 |
| 12 | 30 km/h | C–P | 14:38:20 | 14:40:00 |
| 13 | 30 km/h | P–C | 14:40:30 | 14:42:10 |
| 14 | 30 km/h | C–P | 14:42:55 | 14:44:35 |
| 15 | 80 km/h | P–C | 14:45:05 | 14:46:45 |
| a short break | 14:49:00 | |||
| 16 | 60 km/h | P–C | 14:51:00 | 14:51:55 |
| 17 | 60 km/h | C–P | 14:52:40 | 14:53:20 |
| 18 | 60 km/h | P–C | 14:54:20 | 14:55:05 |
| Point Name | B-Latitude | L-Longitude | H [m] |
|---|---|---|---|
| B1 | 453347.91960 N | 135346.79756 E | 431.950 |
| B2 | 453354.67516 N | 135336.16875 E | 433.722 |
| B3 | 453341.97677 N | 135330.83599 E | 438.648 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dimc, F.; Pavlovčič-Prešeren, P.; Bažec, M. Robustness against Chirp Signal Interference of On-Board Vehicle Geodetic and Low-Cost GNSS Receivers. Sensors 2021, 21, 5257. https://doi.org/10.3390/s21165257
Dimc F, Pavlovčič-Prešeren P, Bažec M. Robustness against Chirp Signal Interference of On-Board Vehicle Geodetic and Low-Cost GNSS Receivers. Sensors. 2021; 21(16):5257. https://doi.org/10.3390/s21165257
Chicago/Turabian StyleDimc, Franc, Polona Pavlovčič-Prešeren, and Matej Bažec. 2021. "Robustness against Chirp Signal Interference of On-Board Vehicle Geodetic and Low-Cost GNSS Receivers" Sensors 21, no. 16: 5257. https://doi.org/10.3390/s21165257
APA StyleDimc, F., Pavlovčič-Prešeren, P., & Bažec, M. (2021). Robustness against Chirp Signal Interference of On-Board Vehicle Geodetic and Low-Cost GNSS Receivers. Sensors, 21(16), 5257. https://doi.org/10.3390/s21165257