
An IMU/ODM/UWB Joint Localization System Based on Modified Cubature Kalman Filtering

Abstract
:1. Introduction
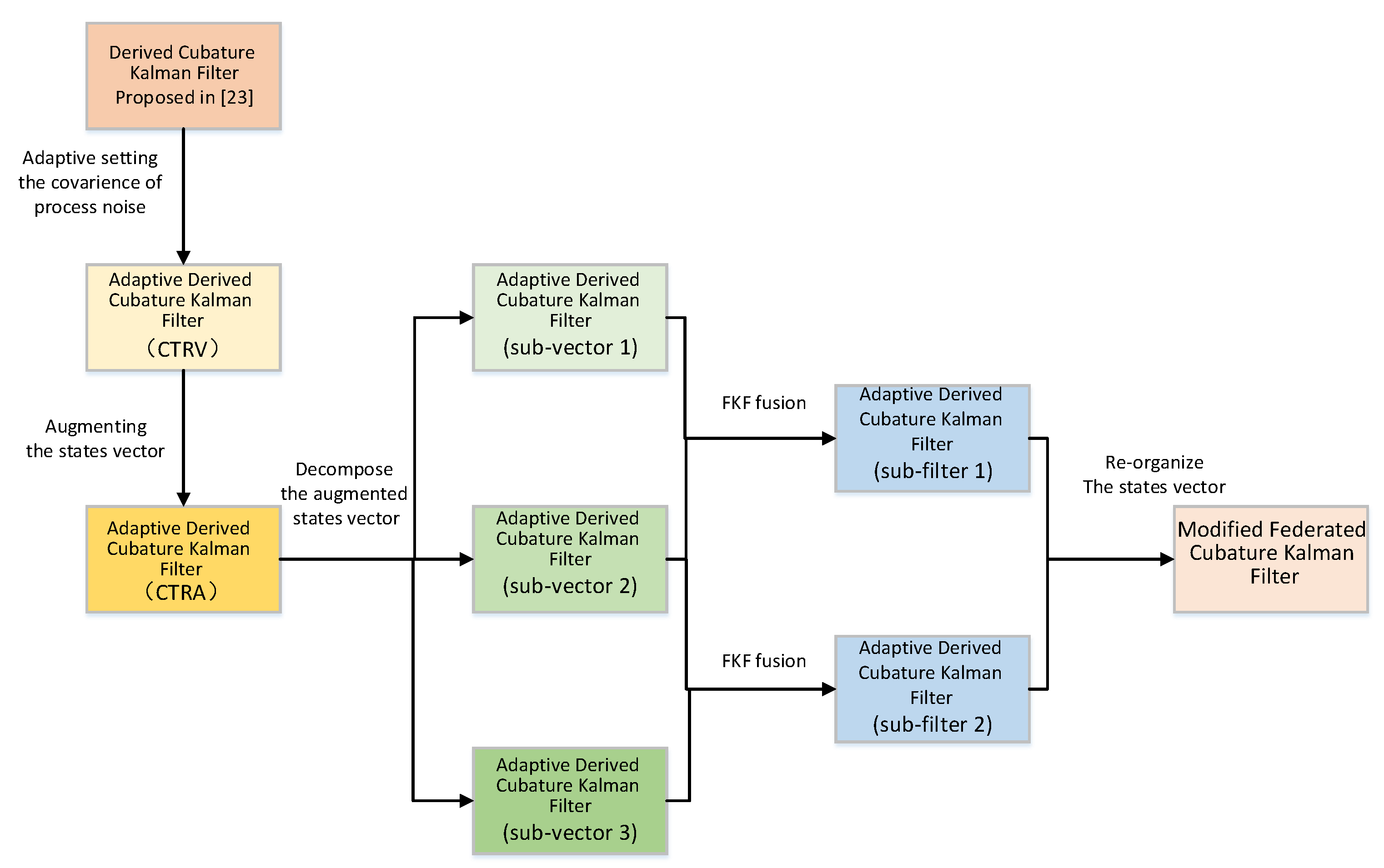
- Adaptive filtering is introduced to improve the ability of the algorithm proposed by He et al. [25] to deal with process noise.
- The expansion method proposed in Li et al. [24] is employed to expand the model, improve the tracking performance of the algorithm, and further enhance the capability of the algorithm in dealing with process noise.
- Given the increased dimension of the system caused by the expansion method, the state space decomposition method proposed in [22] is used to decompose the system state and thus reduce the side effects of the expansion method as much as possible.
2. System Establishment and Problem Description
2.1. System Model
2.2. Analysis of the Process Noise
2.3. Problem Formulation
- Our previous work [25] should be improved based on the idea of adaptive filtering, so that the ratio of Q and R can still be coordinated in a high process noise environment to avoid filtering divergence.
- The model should be expanded to enhance the traceability of the system by using the state vector enhancement method [24].
- The enhanced state vector should be decomposed according to the measurement vector of each sensor [28] to reduce the dimension of the system and thus improve the measurement accuracy of the system.
3. Adaptive SVD-DCKF Filtering
3.1. Preliminary Work
3.2. Adaptive Filtering
3.3. The SVD-ADCKF Algorithm Based on Adaptive Filtering
| Algorithm 1. The specific steps of SVD-ADCKF. |
| Input:, , |
| Output:, , |
| Nonlinear time update |
| 1. Initialize state estimation and covariance estimation ; |
| 2. Perform SVD decomposition on to obtain ; |
| 3. Calculate the cubature point according to the equation: ; |
| 4. Calculate the one-step prediction of each cubature point () based on the state equation and |
| the process noise covariance (); |
| 5. Combine each cubature point to obtain the linear approximation time update :
|
| quad where n is system order; is the weight of each cubature point; |
| 6. Calculate the time update of the linearly approximated error covariance :
|
| Linear measurement update |
| 7. Obtain the linear prediction value of the measurement () based on the time update of |
| the measurement equation to the linear approximation; |
| 8. Calculate Kalman gain K based on the formula: ; |
| 9. Update the system state based on the Kalman gain: ; |
| 10. Update the system error covariance based on the Kalman gain: ; |
| Process noise covariance update |
| 11. Calculate the residual error: ; |
| 12. Calculate the correction matrix: ; |
| 13. Calculate the window width M based on Formulas (10) and (11); |
| 14. Correct the process noise covariance: ; |
| 15. Output , , as the initial value for the next moment, and repeat Steps 1–14. |
| End. |
4. Improvement in the Tracking Performance
4.1. System Model after the State Vector Enhancement
4.2. Accuracy of the Augmented System Model
4.3. Simplification of the State Vector
4.4. Computational Complexity Analysis
4.5. Fusion and Reorganization of Sub-States
| Algorithm 2. Specific steps of the MFCKF. |
| Input:, , |
| Output:, , |
| 1. Decompose and and obtain sub-states (i.e., , , and ) |
| and their covariance (i.e., , , and ); |
| 2. Filter the sub-filters based on the sub-states and sub-covariances as well as the measured values and |
| obtain the sub-states and sub-covariances at time (, , and , , , ) |
| (based on the filter shown in Algorithm 1); |
| 3. Eliminate redundant information and get sub-states for fusion (i.e., , , and ) |
| and their variances (i.e., , , and ); |
| 4. Fuse the sub-states and covariance based on the FKF framework and thus obtain and |
| as well as their covariance and ; |
| 5. Recombine , and to obtain the final status update ; |
| 6. Recombine , and to obtain the final status update ; |
| 7. Output , , as the initial value for the next moment, and repeat Steps 1–6. |
| End. |
5. Simulation
5.1. Simulation on the SVD-FADCKF
5.2. Simulation on the MFCKF
6. Conclusions
- Transplanting the algorithm to a physical platform to verify the filtering performance of the proposed algorithm under actual conditions.
- Investigating the dynamic response performance of the proposed algorithm to further improve its performance in the highly dynamic environment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dong, X.; Zhou, Y.; Ren, Z.; Zhong, Y. Time-varying formation control for unmanned aerial vehicles with switching interaction topologies. Control Eng. Pract. 2016, 46, 26–36. [Google Scholar] [CrossRef]
- Golden, S.A.; Bateman, S.S. Sensor measurements for Wi-Fi location with emphasis on time-of-arrival ranging. IEEE Trans. Mob. Comput. 2007, 6, 1185–1198. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Ye, Q.; Cheng, J.; Wang, L. RSSI-based bluetooth indoor localization. In Proceedings of the 2015 11th International Conference on Mobile Ad-hoc and Sensor Networks (MSN), Shenzhen, China, 16–18 December 2015; pp. 165–171. [Google Scholar]
- Sugano, M.; Kawazoe, T.; Ohta, Y.; Murata, M. Indoor localization system using RSSI measurement of wireless sensor network based on zigbee standard. In Proceedings of the 6th IASTED International Conference on Wireless and Optical Communications, Banff, AB, Canada, 3–5 July 2006; pp. 503–508. [Google Scholar]
- Lee, S.; Song, J.B. Mobile robot localization using infrared light reflecting landmarks. In Proceedings of the Mobile Robot Localization Using Infrared Light Reflecting Landmarks, Seoul, Korea, 17–20 October 2007; pp. 674–677. [Google Scholar]
- Nageli, T.; Conte, C.; Domahidi, A.; Morari, M.; Hilliges, O. Environment-independent formation flight for micro aerial vehicles, in Intelligent Robots and Systems (IROS 2014). In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1141–1146. [Google Scholar]
- Kushleyev, A.; Mellinger, D.; Powers, C.; Kumar, V. Towards a swarm of agile micro quadrotors. Auton. Robot. 2013, 35, 287–300. [Google Scholar] [CrossRef]
- Li, Z.; Dehaene, W.; Gielen, G. System Design for Ultra-Low-Power UWB-based Indoor Localization. In Proceedings of the 2007 IEEE International Conference on Ultra-Wideband (ICUWB 2007), Singapore, 24–26 September 2007; pp. 159–164. [Google Scholar]
- Li, H.B.; Wang, J.; Wang, C.Y. Discussion on affection factors of UWB indoor kinematic positioning. J. Navig. Position. 2018, 6, 45–48. [Google Scholar]
- Denis, B.; Pierrot, J.B.; Abou-Rjeily, C. Joint distributed synchronization and positioning in UWB ad hoc networks using TOA. IEEE Trans. Microw. Theory Tech. 2006, 54, 1896–1911. [Google Scholar] [CrossRef]
- Ruotsalainen, L.; Kirkko-Jaakkola, M.; Rantanen, J.; Maija, M. Error Modelling for Multi-Sensor Measurements in Infrastructure-Free Indoor Navigation. Sensors 2018, 18, 590. [Google Scholar] [CrossRef] [Green Version]
- Feng, X.; Zhang, T.; Lin, T.; Tang, H.; Niu, X. Implementation and Performance of a Deeply-Coupled GNSS Receiver with Low-Cost MEMS Inertial Sensors for Vehicle Urban Navigation. Sensors 2020, 20, 3397. [Google Scholar] [CrossRef]
- Kim, J.; Park, M.; Bae, Y.; Kim, O.-J.; Kim, D.; Kim, B.; Kee, C. A Low-Cost, High-Precision Vehicle Navigation System for Deep Urban Multipath Environment Using TDCP Measurements. Sensors 2020, 20, 3254. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, H.; Ullah, I.; Khan, U.; Qureshi, M.B.; Manzoor, S.; Muhammad, N.; Shahid Khan, M.U.; Nawaz, R. Adaptive Filtering on GPS-Aided MEMS-IMU for Optimal Estimation of Ground Vehicle Trajectory. Sensors 2019, 19, 5357. [Google Scholar] [CrossRef] [Green Version]
- Kukko, A.; Kaijaluoto, R.; Kaartinen, H.; Lehtola, V.V.; Jaakkola, A.; Hyypp, J. Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. ISPRS J. Photogramm. Remote Sens. 2017, 132, 199–209. [Google Scholar]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR integrated navigation system for urban and indoor environments using hybrid scan matching algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [Green Version]
- Chiang, K.-W.; Tsai, G.-J.; Li, Y.-H.; Li, Y.; El-Sheimy, N. Navigation Engine Design for Automated Driving Using INS/GNSS/3D LiDAR-SLAM and Integrity Assessment. Remote Sens. 2020, 12, 1564. [Google Scholar] [CrossRef]
- Carlson, N.A.; Berarducci, M.P. Federated Kalman Filter Simulation Results. Navigation 1994, 41, 297–322. [Google Scholar] [CrossRef]
- Qiu, H.Z.; Zhang, H.Y.; Jin, H. Fusion algorithm of correlated local estimates. Aerosp. Sci. Technol. 2004, 8, 619–626. [Google Scholar] [CrossRef]
- Li, M.; Zhu, H.; You, S.; Tang, C. UWB-Based Localization System Aided With Inertial Sensor for Underground Coal Mine Applications. IEEE Sens. J. 2020, 20, 6652–6669. [Google Scholar] [CrossRef]
- Giarré, L.; Pascucci, F.; Morosi, S.; Martinelli, A. Improved PDR Localization via UWB-Anchor Based on-Line Calibration. In Proceedings of the 2018 IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), Palermo, Italy, 10–13 September 2018; pp. 1–5. [Google Scholar]
- Hu, G.; Gao, S.; Zhong, Y.; Gao, B.; Subic, A. Modified strong tracking unscented Kalman filter for nonlinear state estimation with process model uncertainty. Int. J. Adapt. Control. Signal Process. 2015, 29, 1561–1577. [Google Scholar] [CrossRef]
- Han, Y.; Wei, C.; Li, R.; Wang, J.; Yu, H. A Novel Cooperative Localization Method Based on IMU and UWB. Sensors 2020, 20, 467. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, J.; Bi, Y.; Li, K.; Wang, K.; Lin, F.; Chen, B.M. Accurate 3D Localization for MAV Swarms by UWB and IMU Fusion. In Proceedings of the 2018 IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 12–15 June 2018. [Google Scholar]
- He, C.; Tang, C.; Yu, C. A Federated Derivative Cubature Kalman Filter for IMU-UWB Indoor Positioning. Sensors 2020, 20, 3514. [Google Scholar] [CrossRef] [PubMed]
- Shen, Y.; Zhu, H.; Mo, J.; Song, Y. Application and simulation of simplified Sage-Husa adaptive filter in integrated navigation system. J. Qingdao Univ. Eng. Technol. Ed. 2001. Available online: https://www.researchgate.net/publication/291150654_Application_and_simulation_of_simplified_Sage-Husa_adaptive_filter_in_integrated_navigation_system (accessed on 30 June 2021).
- Kownacki, C. Design of an adaptive Kalman filter to eliminate measurement faults of a laser rangefinder used in the UAV system. Aerosp. Sci. Technol. 2015, 41, 81–89. [Google Scholar] [CrossRef]
- Sabatini, A.M. Variable-State-Dimension Kalman-Based Filter for Orientation Determination Using Inertial and Magnetic Sensors. Sensors 2012, 12, 8491–8506. [Google Scholar] [CrossRef]
- Hu, G.; Gao, S.; Zhong, Y. A derivative UKF for tightly coupled INS/GPS integrated navigation. ISA Trans. 2015, 56, 135–144. [Google Scholar] [CrossRef]
- Gao-Ge, H.; She-Sheng, G.; Yong-Min, Z.; Bing-Bing, G. Stochastic stability of the derivative unscented Kalman filter. Chin. Phys. B 2015, 24, 070202. [Google Scholar]
- Julier, S.J. Unscented filtering and nonlinear estimation. IEEE Proc. 2004, 92, 401–422. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Original System (5+5) | Augmented System (6+6) | Simplified Augment System (6+4) |
|---|---|---|---|
| Calculation of cubature points | 450 flops 460 flops 200 flops | 792 flops 844 flops 552 flops | 508 flops 538 flops 300 flops |
| Time update | 50 flops | 72 flops | 52 flops |
| Prediction of covariance update | 260 flops | 372 flops | 270 flops |
| Measurement forecast | 90 flops | 132 flops | 94 flops |
| Calculation of Kalman gain | 1504 flops | 2596 flops | 1684 flops |
| Status update | 30 flops | 36 flops | 30 flops |
| Covariance update | 950 flops | 1656 flops | 1068 flops |
| Total | 3994 flops | 7052 flops | 4544 flops |
| Item | Parameters |
|---|---|
| Initial state | X coordinate: 4 (cm) Y coordinate: 4 (cm) Velocity: 5 (cm/s) Accelerate: 0 (cm/s) Yaw angle: /3 () Yaw angle changement: /90 () |
| Simulation time | 150 (/s) |
| Sampling time | |
| Initial covariance | |
| Initial estimate | + |
| The driving matrix of process noise | |
| Distribution of process noise | |
| Initial covariance of process noise | 6-order diagonal identity matrix |
| Measurement noise of UWB | |
| White noise of gyro | |
| Constant drift of gyro | 0.1°/h |
| White noise of accelerometer | |
| Constant bias of accelerometer | g |
| White noise of magnetometer | |
| White noise of odometer |
| Item | SVD-FDCKF | SVD-FADCK |
|---|---|---|
| Average positioning error (cm) | 1.2937 | 1.1915 |
| Item | SVD-FDCKF | SVD-FADCK | MFCKF |
|---|---|---|---|
| Average positioning error (cm) | 1.2937 | 1.1915 | 0.8698 |
| Item | SVD-FDCKF | MFDCK |
|---|---|---|
| Average calculation time (s) | 0.0445 | 0.0398 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, C.; He, C.; Dou, L. An IMU/ODM/UWB Joint Localization System Based on Modified Cubature Kalman Filtering. Sensors 2021, 21, 4823. https://doi.org/10.3390/s21144823
Tang C, He C, Dou L. An IMU/ODM/UWB Joint Localization System Based on Modified Cubature Kalman Filtering. Sensors. 2021; 21(14):4823. https://doi.org/10.3390/s21144823
Chicago/Turabian StyleTang, Chao, Chengyang He, and Lihua Dou. 2021. "An IMU/ODM/UWB Joint Localization System Based on Modified Cubature Kalman Filtering" Sensors 21, no. 14: 4823. https://doi.org/10.3390/s21144823
APA StyleTang, C., He, C., & Dou, L. (2021). An IMU/ODM/UWB Joint Localization System Based on Modified Cubature Kalman Filtering. Sensors, 21(14), 4823. https://doi.org/10.3390/s21144823