
Communication Interface Manager for Improving Performance of Heterogeneous UAV Networks



Abstract
:1. Introduction
2. Related Works
2.1. Homogeneous Systems
2.2. Heterogenous Systems
2.3. Discussion
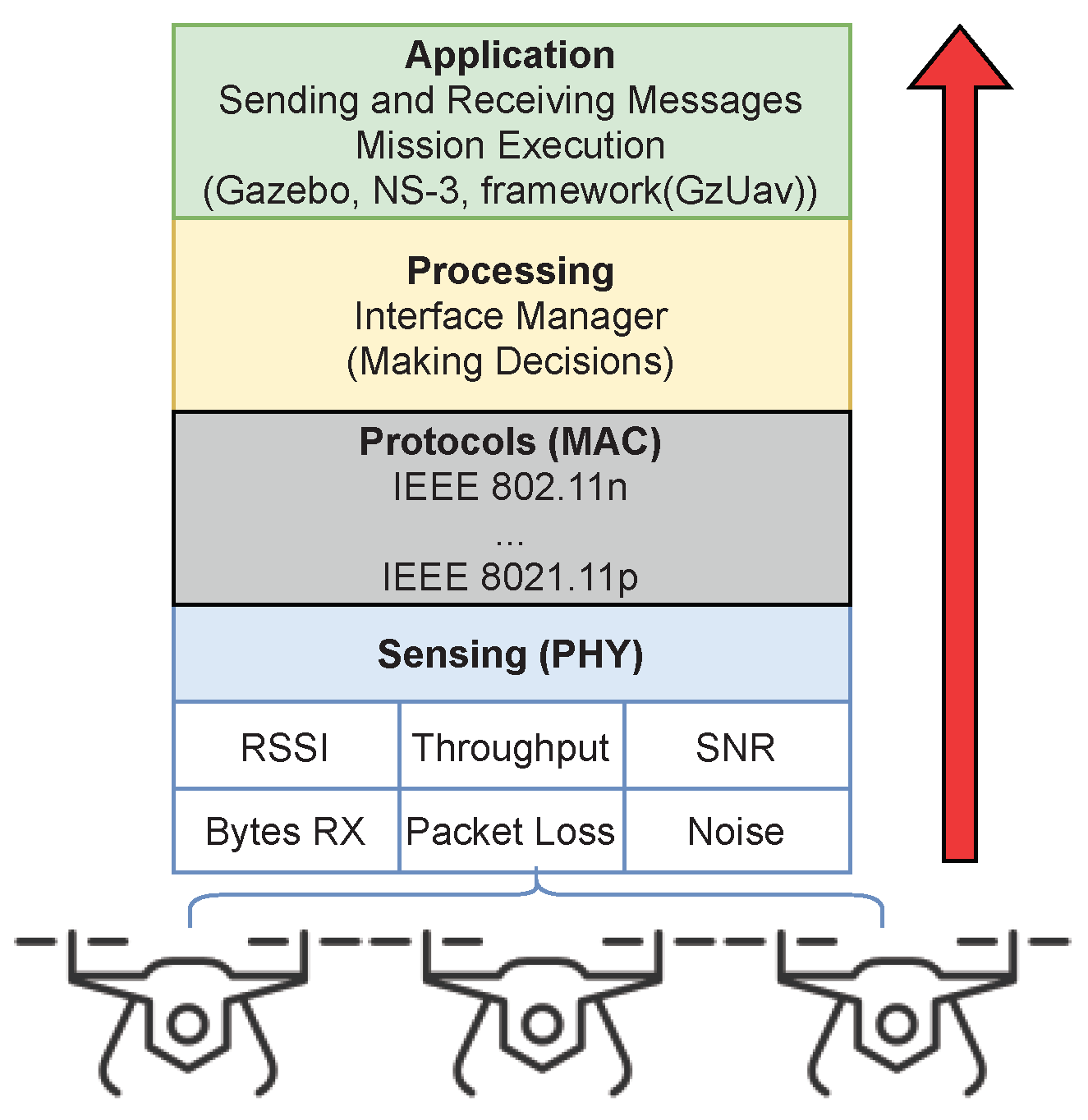
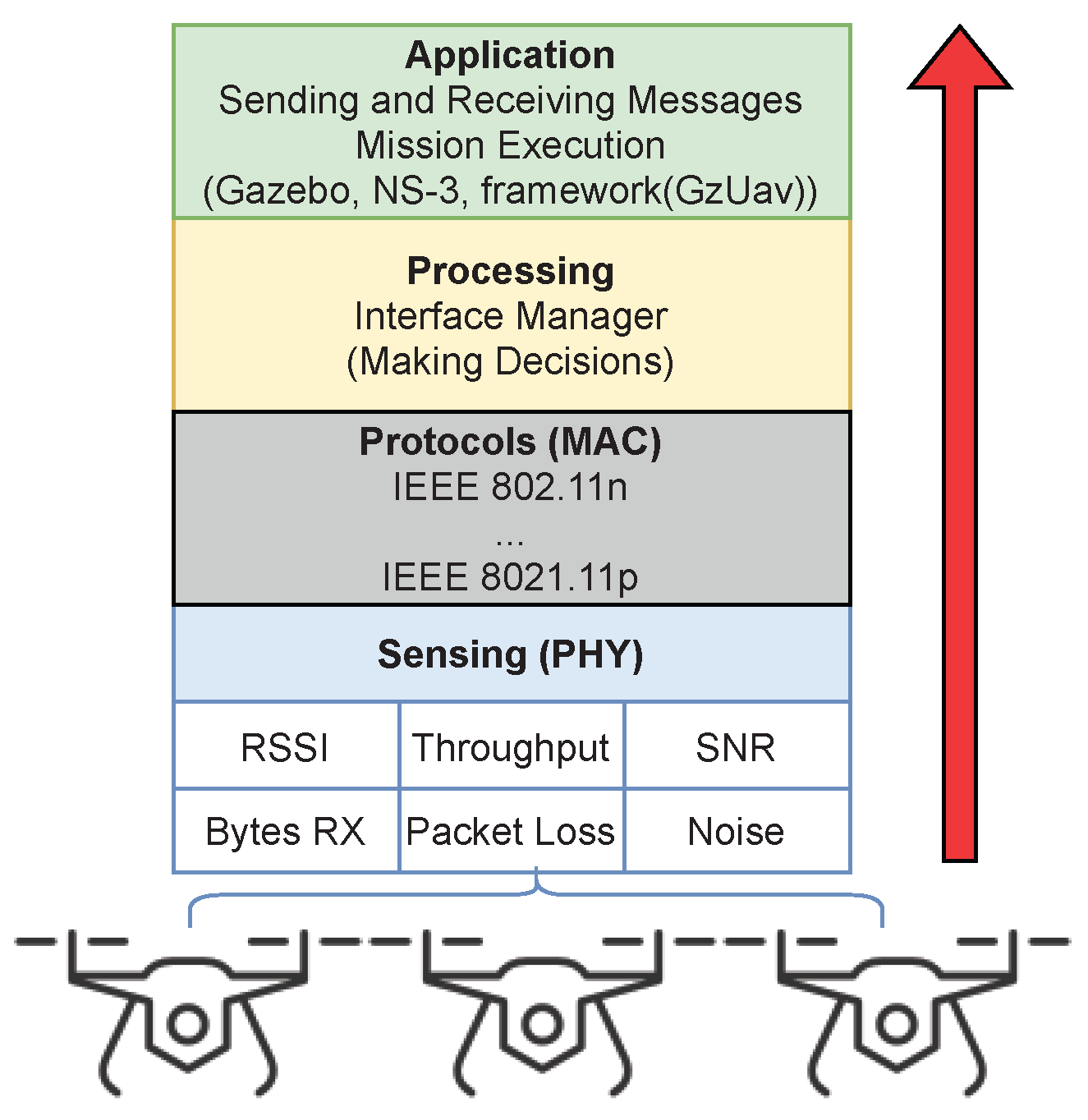
3. Architecture of the Interface Manager
- Application: In this layer, the mission of each UAV is defined. This includes the definition of trajectories, their mobility features, their goals, the type of messages that will be transmitted by each UAV, the recipients, and their payload. In addition, other details are defined in this layer such as the frequency of sending, definition of the protocol used for routing, and packet size. This layer can synchronize with other applications, in our case, with the NS-3 network simulator and the Gazebo virtual environment.
- Processing: This layer is responsible for executing systems, mechanisms, reasoning or decision-making entities, and coordinating systems. More specifically, it is responsible for the number of vehicles (nodes) in the network, the amount of interfaces, analyzing the parameters sensed by the medium, and calculating other parameters or conditions. Such parameters are used as the input of the decision-making process. This layer evaluates the parameters received from the sensing layer composed by its own and other sensing nodes to define the interface that will improve the link. To ensure a fair decision, it is necessary to use parameters common to all employed wireless interfaces.
- Sensing (PHY): This layer is responsible for sensing medium information and metrics (signal strength, background noise, latency, throughput, packet loss, and quantities of sent and received bytes). In the proposed architecture, periodic beacon frames are transmitted to allow calculation of the desired metrics.
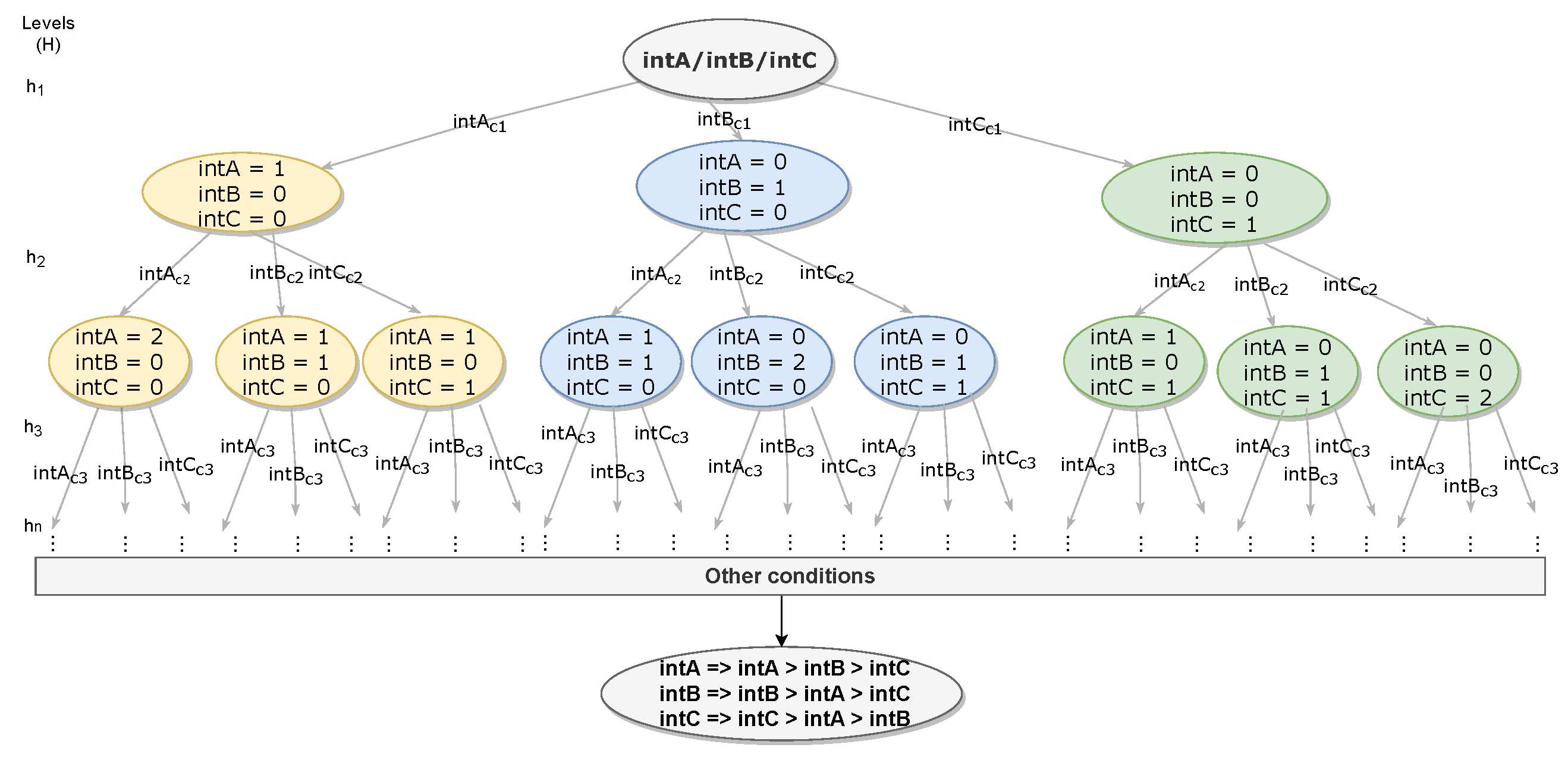
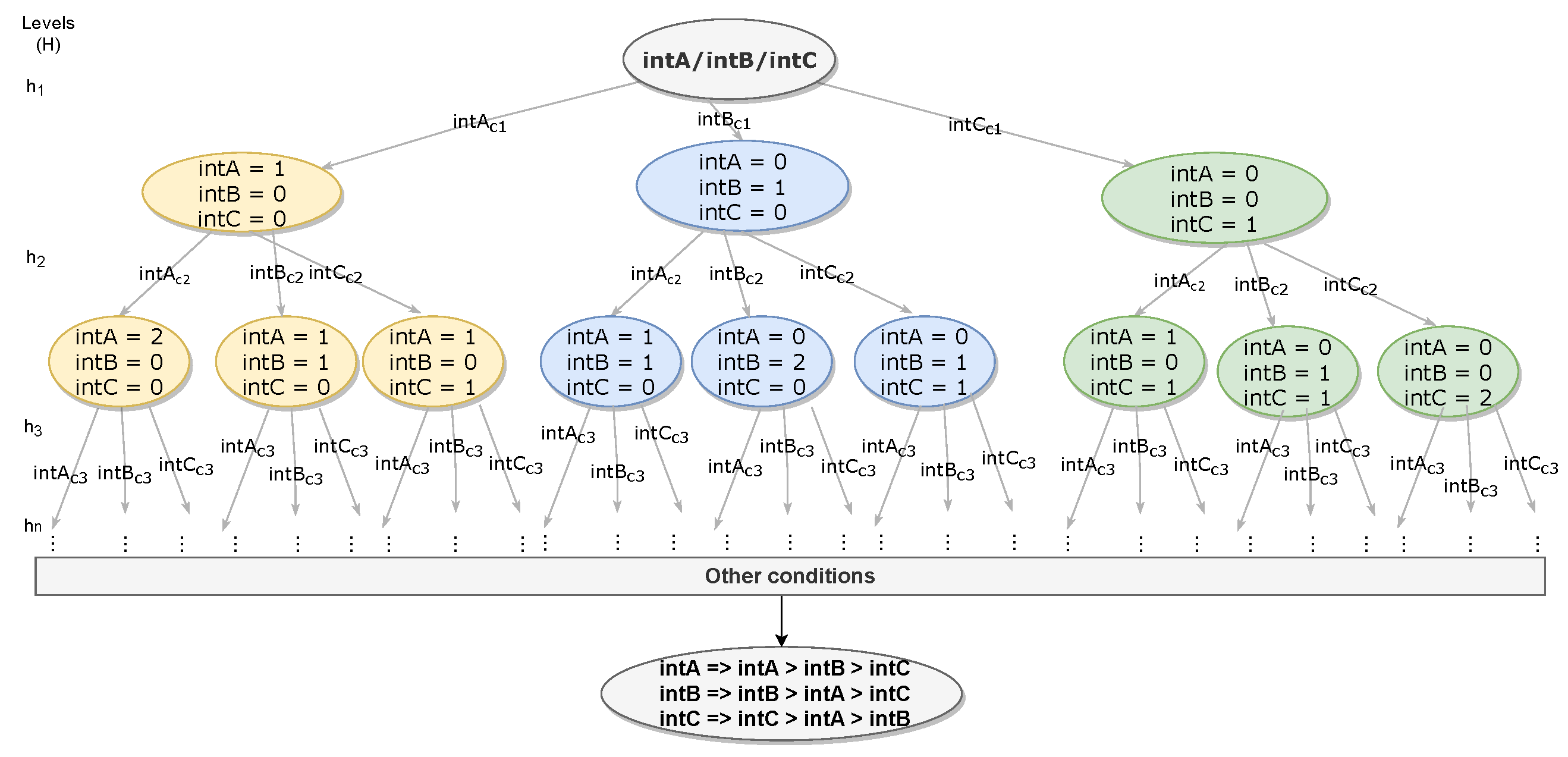
4. Heuristic and System Model
5. Experimental Setup
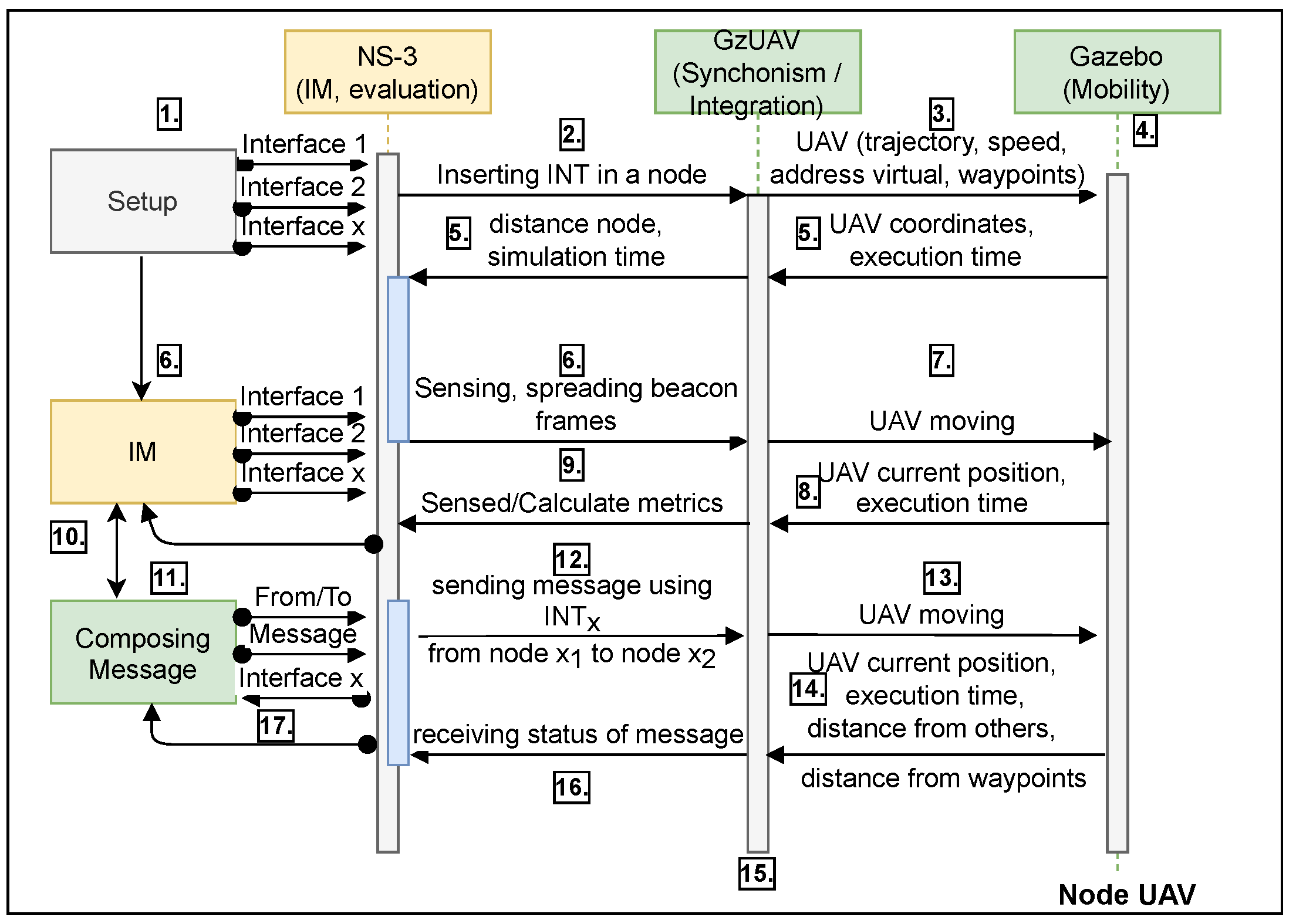
- NS-3: This classic network simulator is used to compose virtual communication nodes assigning interfaces (PHY), standards (MAC), routing protocols, general settings (channel, frequency, and propagation models), loss and fading models, IP address, and other networks settings needed to deploy wireless simulation environments [15,40]. Version 3.30.1 was used.
- GzUAV: The Gazebo-based framework for ArduCopter multi-UAV simulation allows running multiple-UAV simulations in Gazebo [41]. The set of programs includes a tool called GzUAVChannel, which creates instances of virtual UAVs in Gazebo, keeping the simulation clock strictly synchronized with NS-3 and ArduCopter (allows simulated UAVs to be ready to fly), compounding more realistic wireless network simulations. ROS topics are applied by the framework that integrates the Mavlink protocol commands and simulation clocks in order to compose virtual communication channels for more than one instance of ArduCopter. Thus, each channel is defined by a UAV with different SSIDs, ports, and addresses, generating multiple instances to be connected in Gazebo. This framework also allows writing programs using the DroneKit platform.
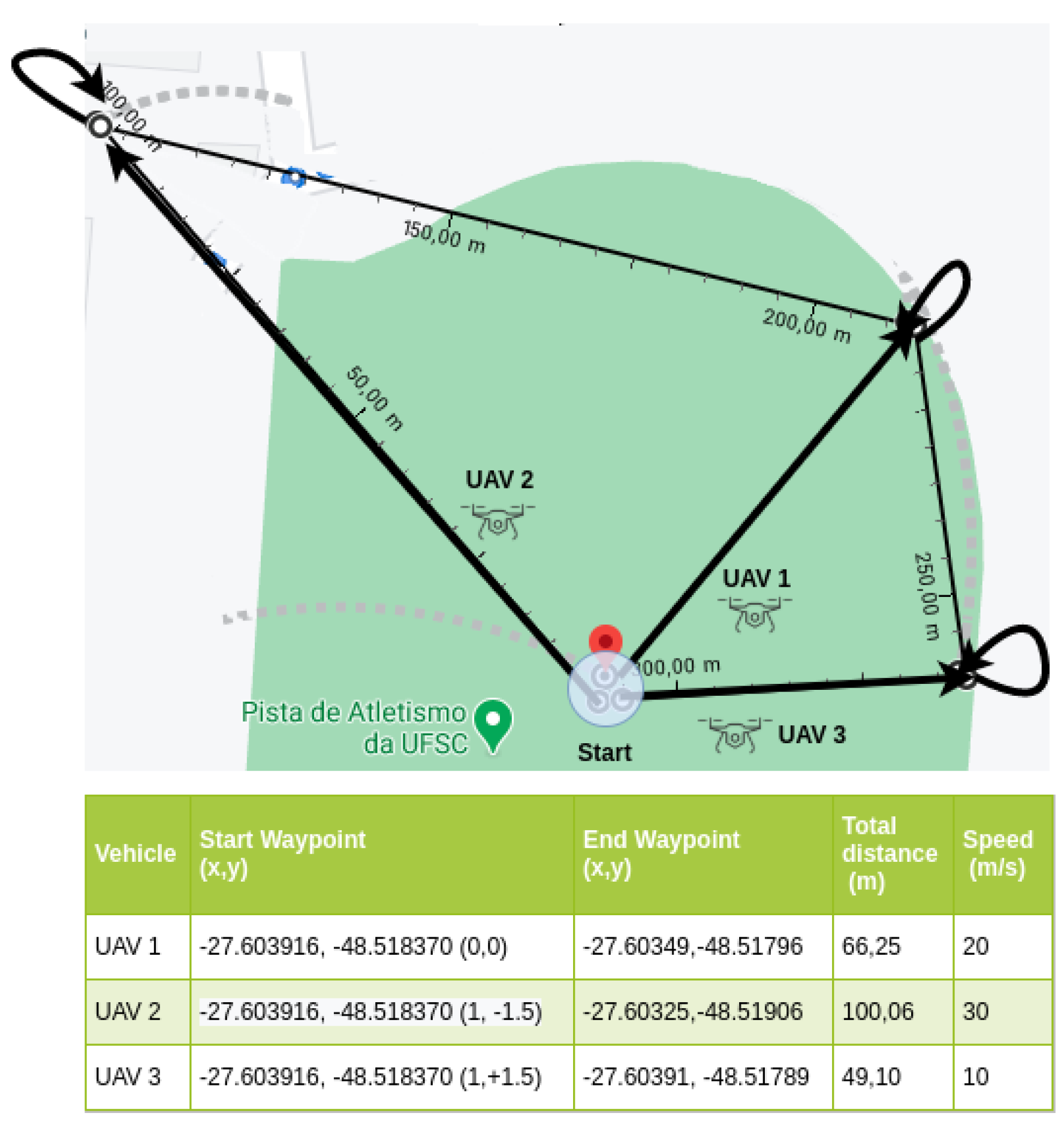
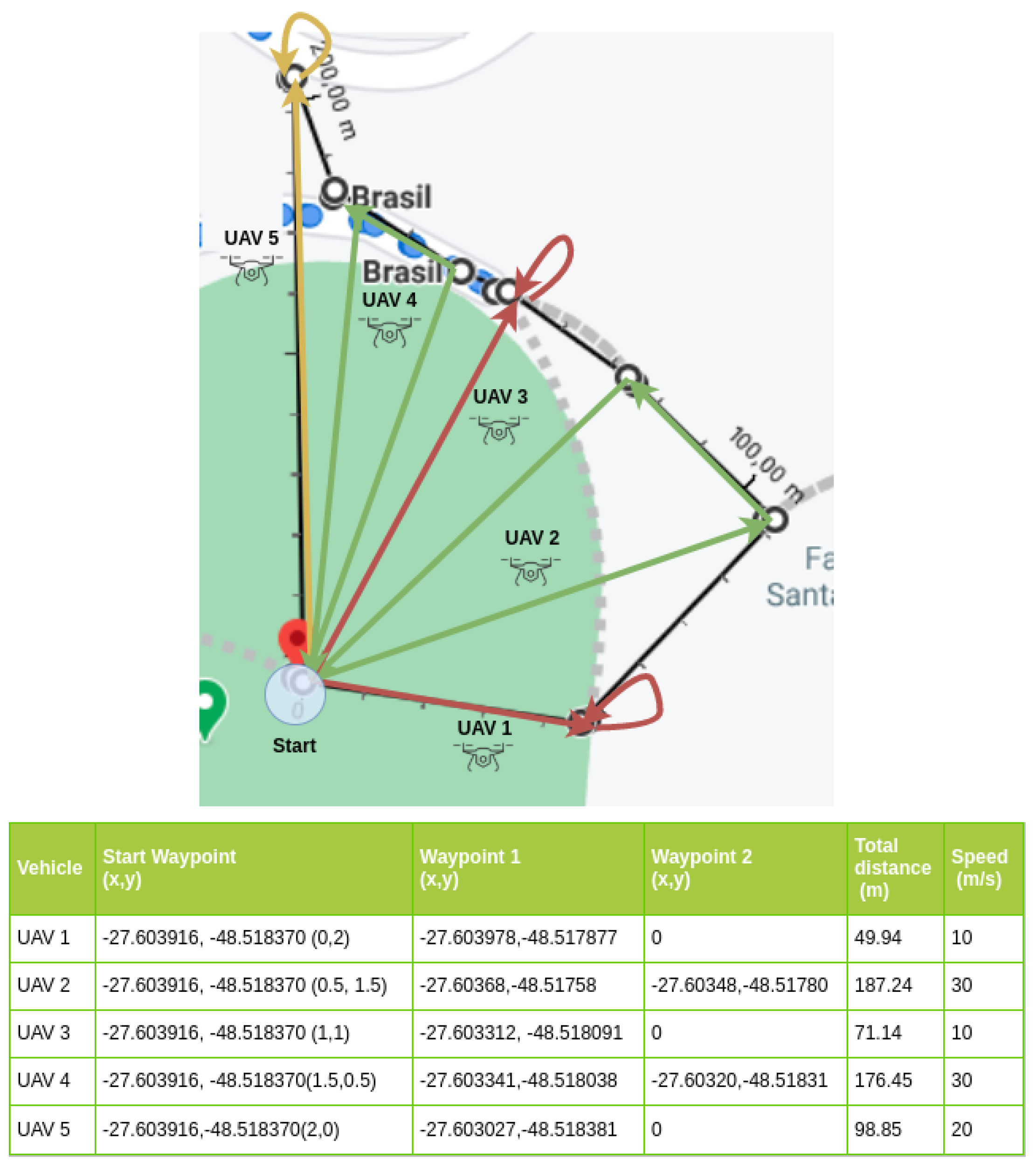
- Gazebo (robot simulation): This tool is used to generate 3D simulations, allowing the creation of realistic scenarios where robots, or populations of robots, perform their missions (robots are UAV in the present study). This allows the testing of algorithm performance and the validation of models. Gazebo allows the definition of real coordinates for UAVs trajectories (waypoints) and realistic experimentation scenarios. Other useful features include: speed definition, UAV flight mode, UAV model, and distance–altitude calculation. The experiments presented in this paper use the features of the Iris UAV RTF Quadcopter.
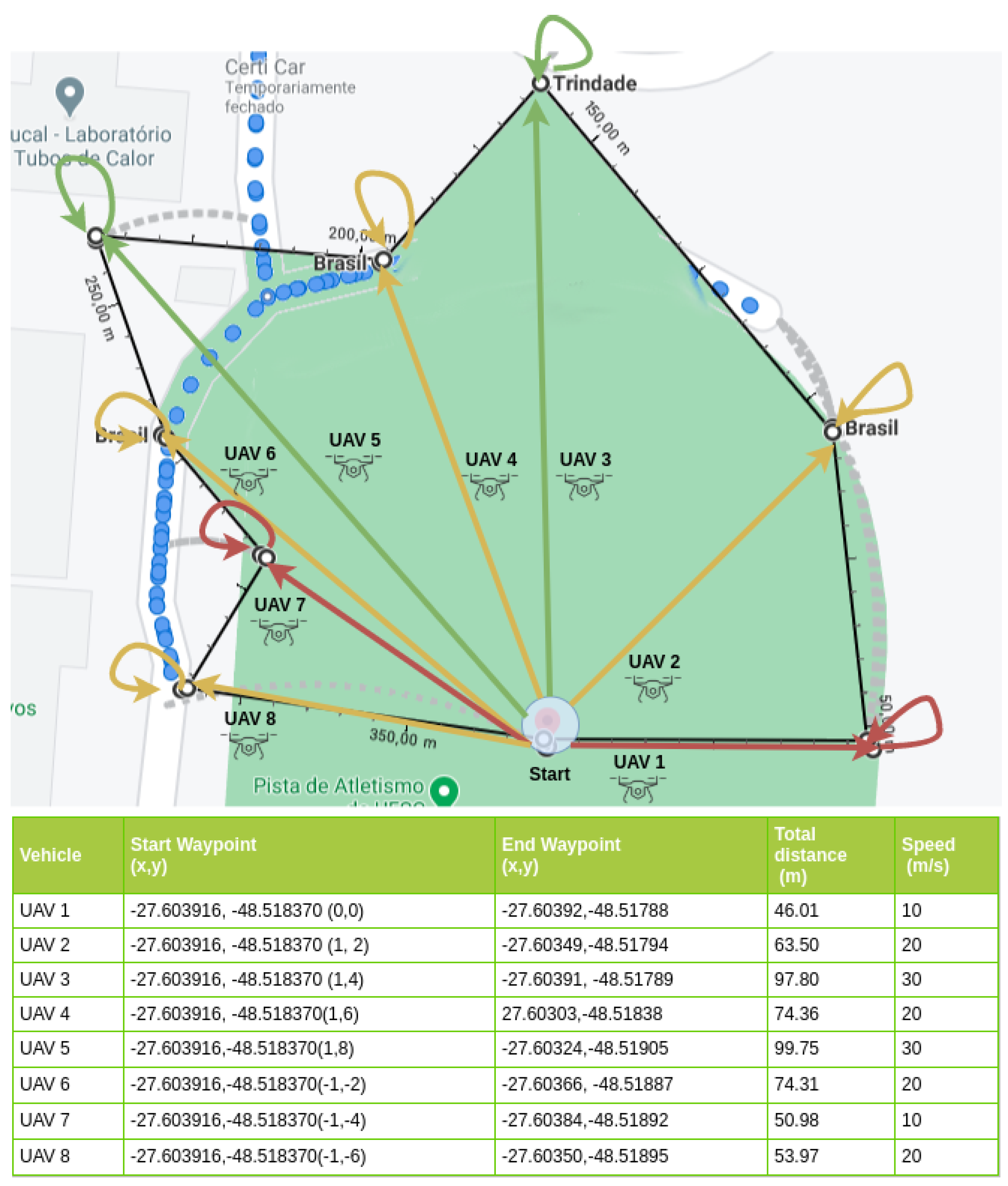
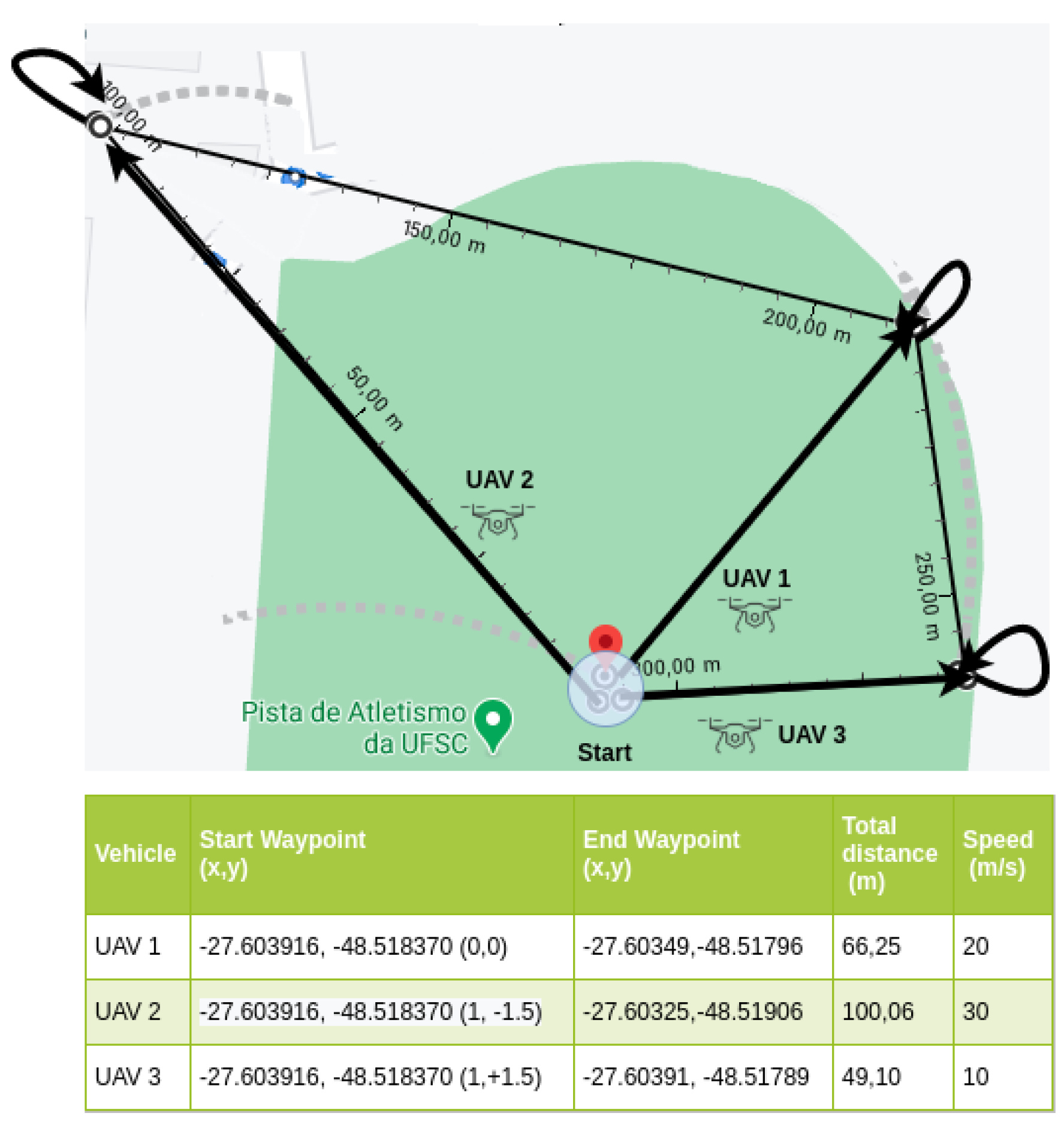
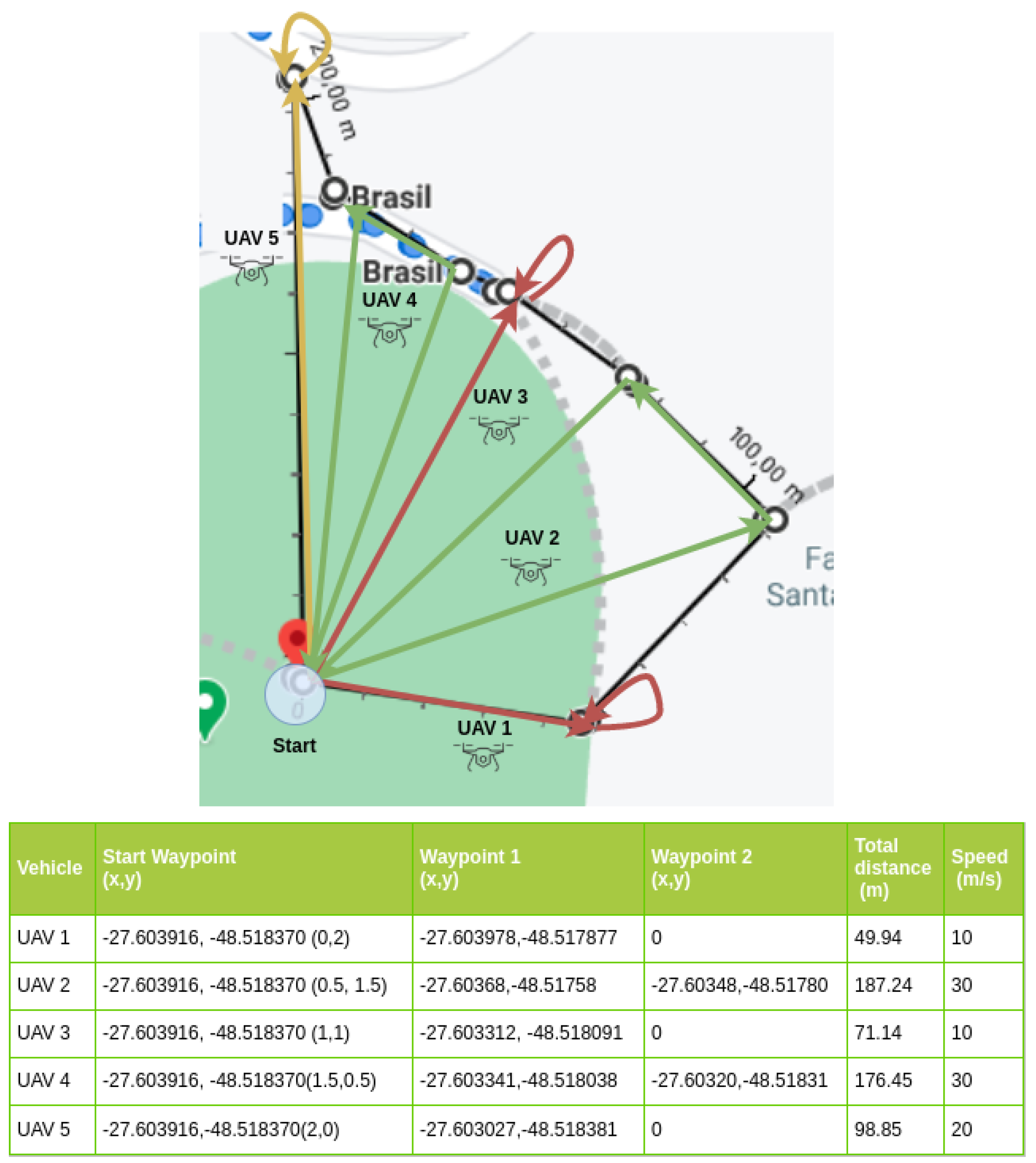
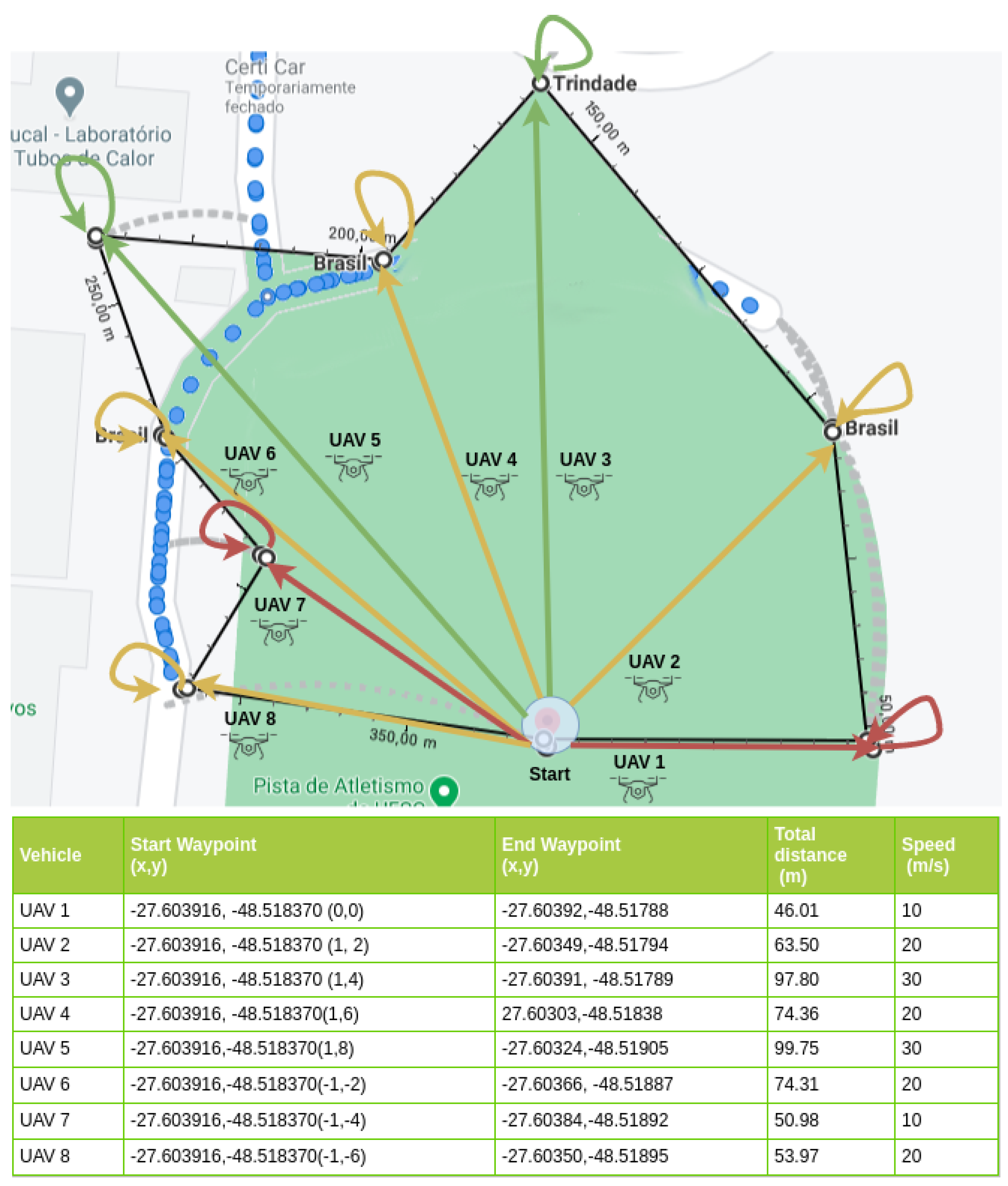
Experimentation Scenarios
6. Obtained Results
6.1. Application Evaluation
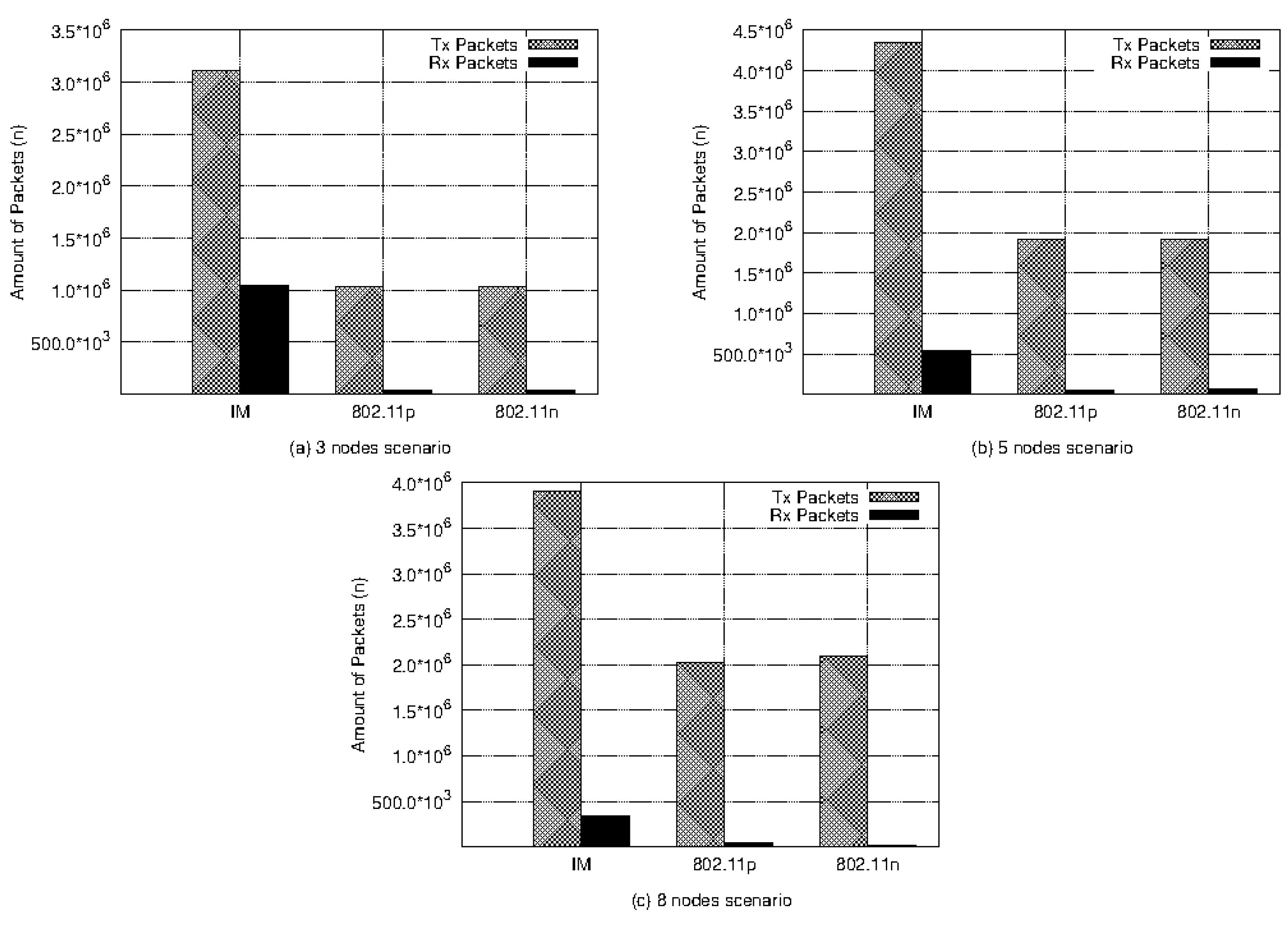
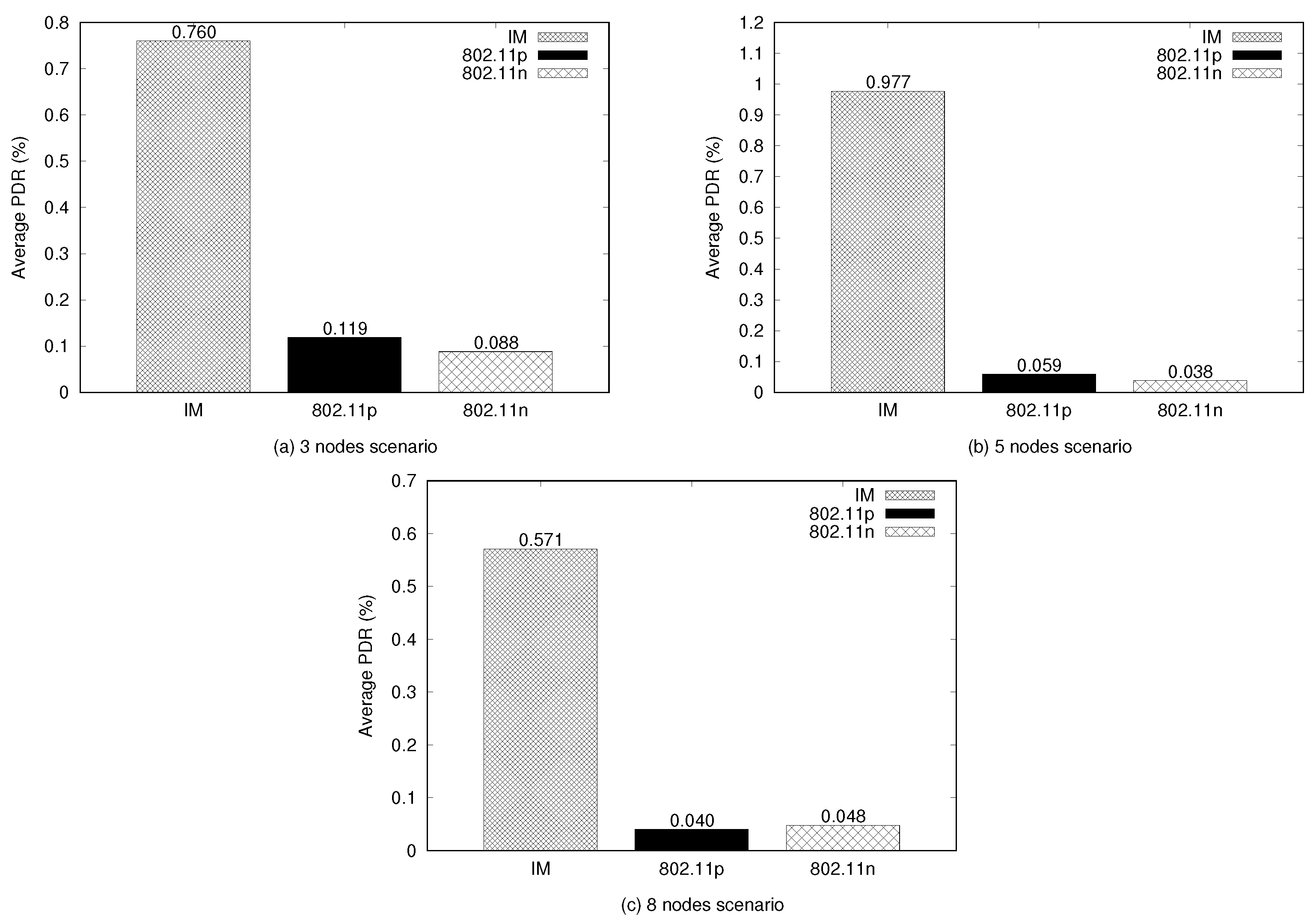
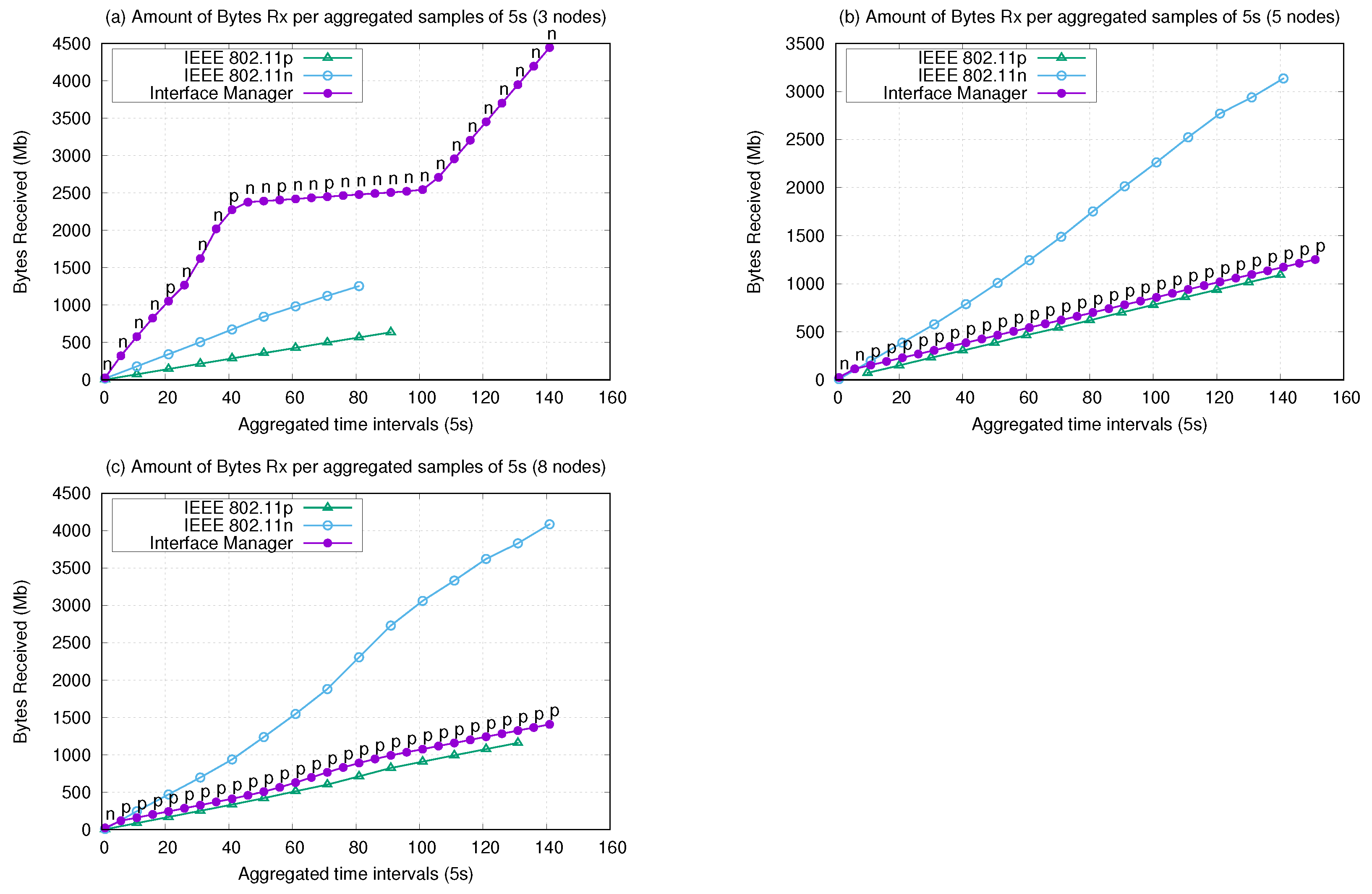
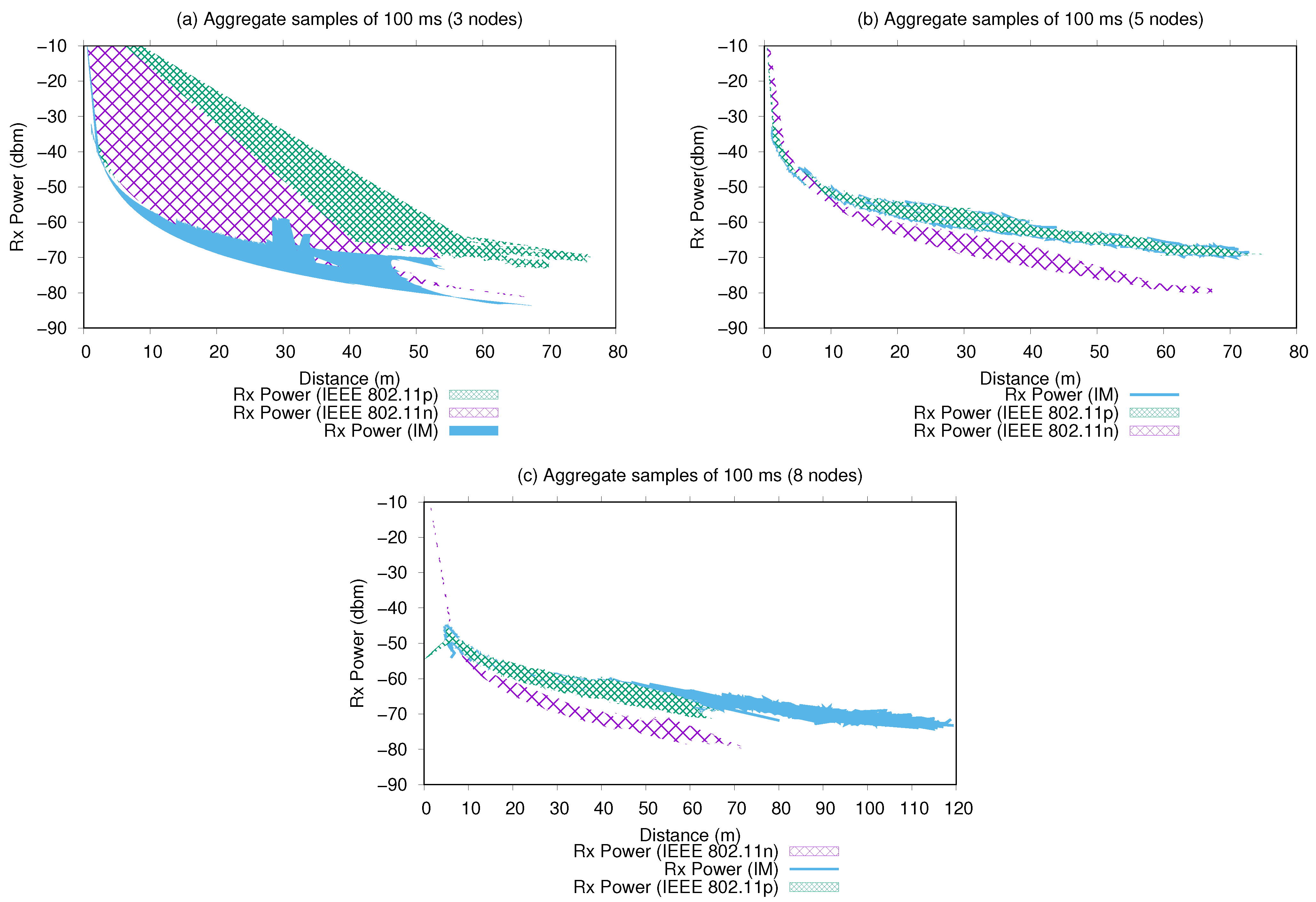
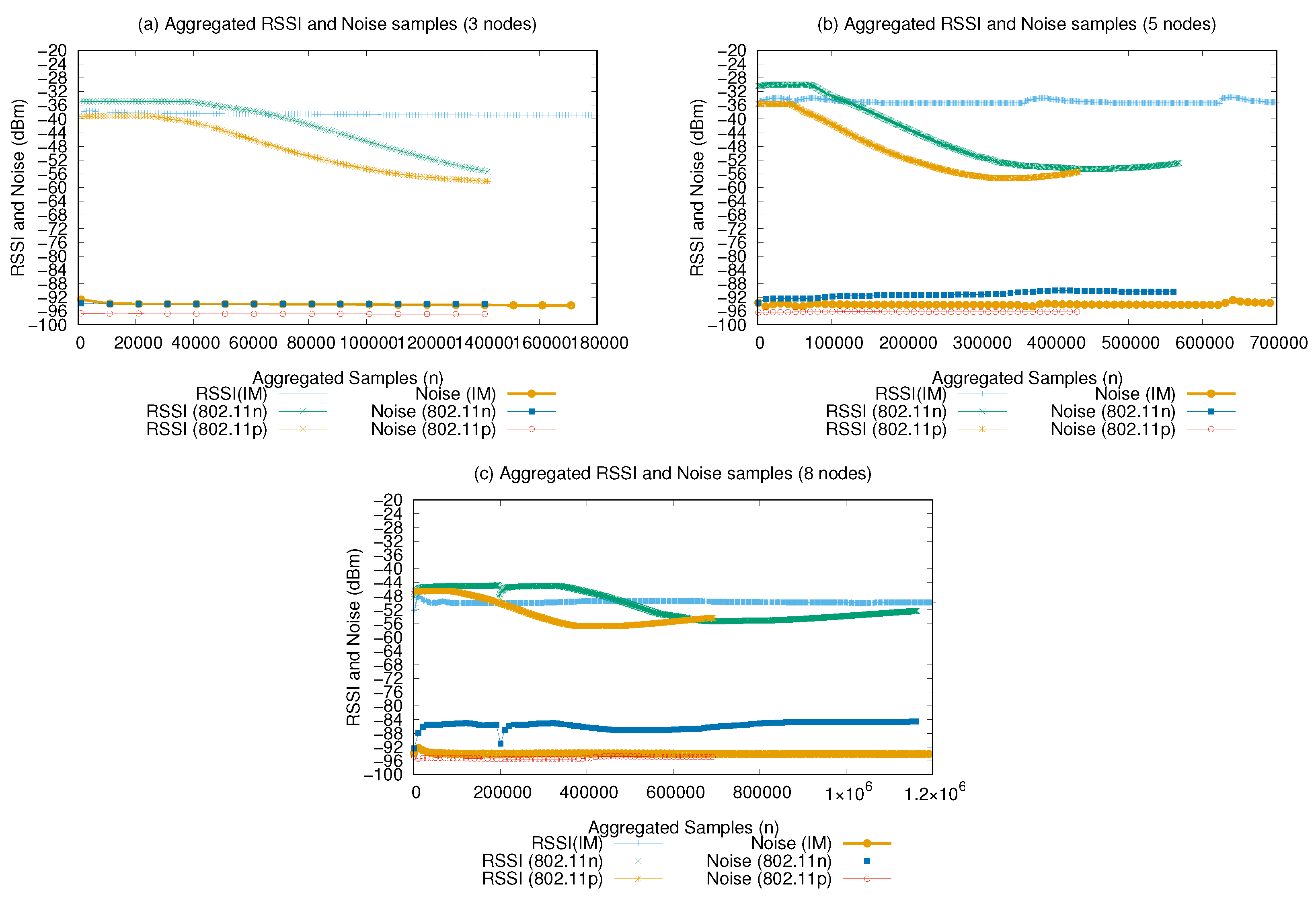
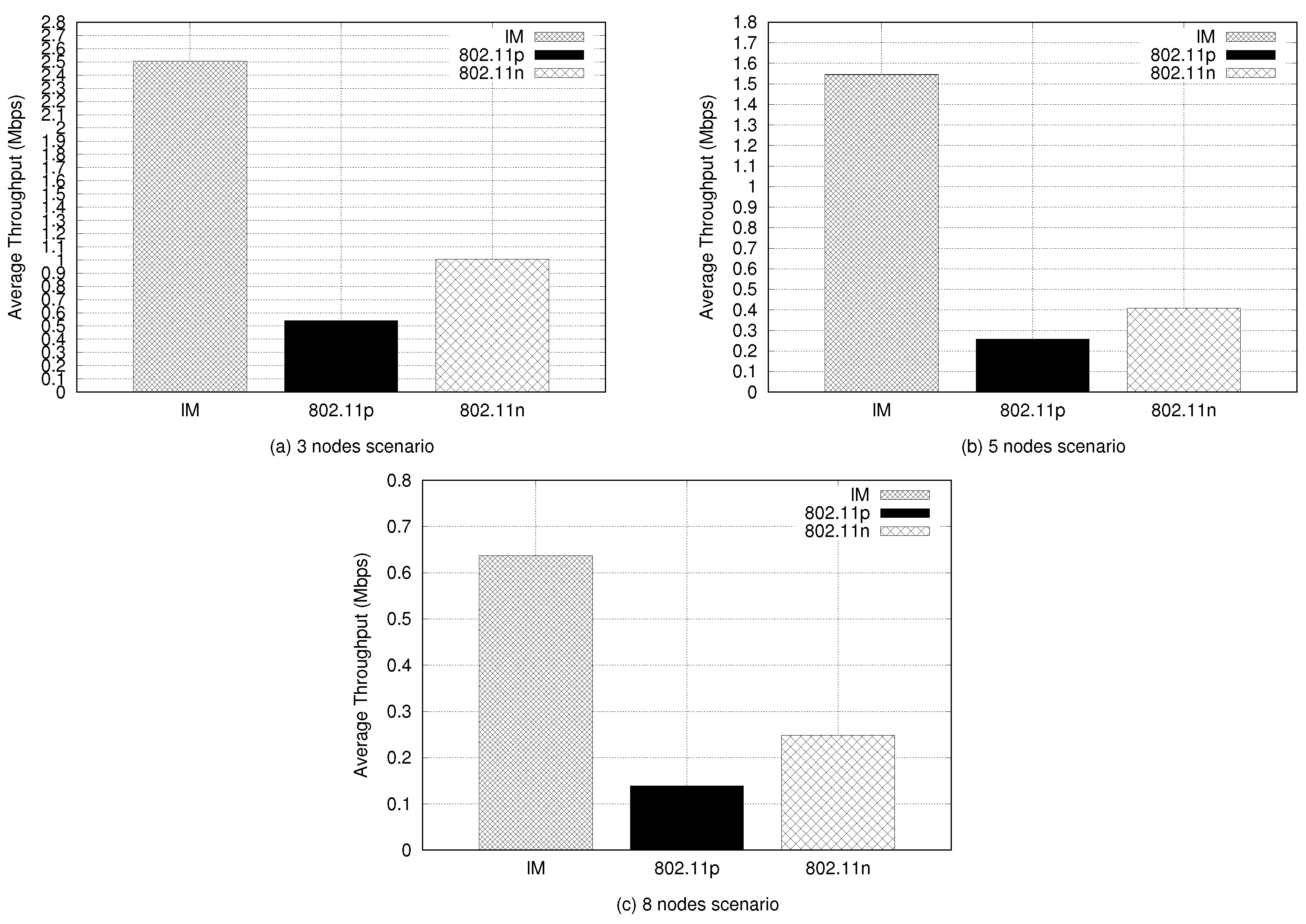
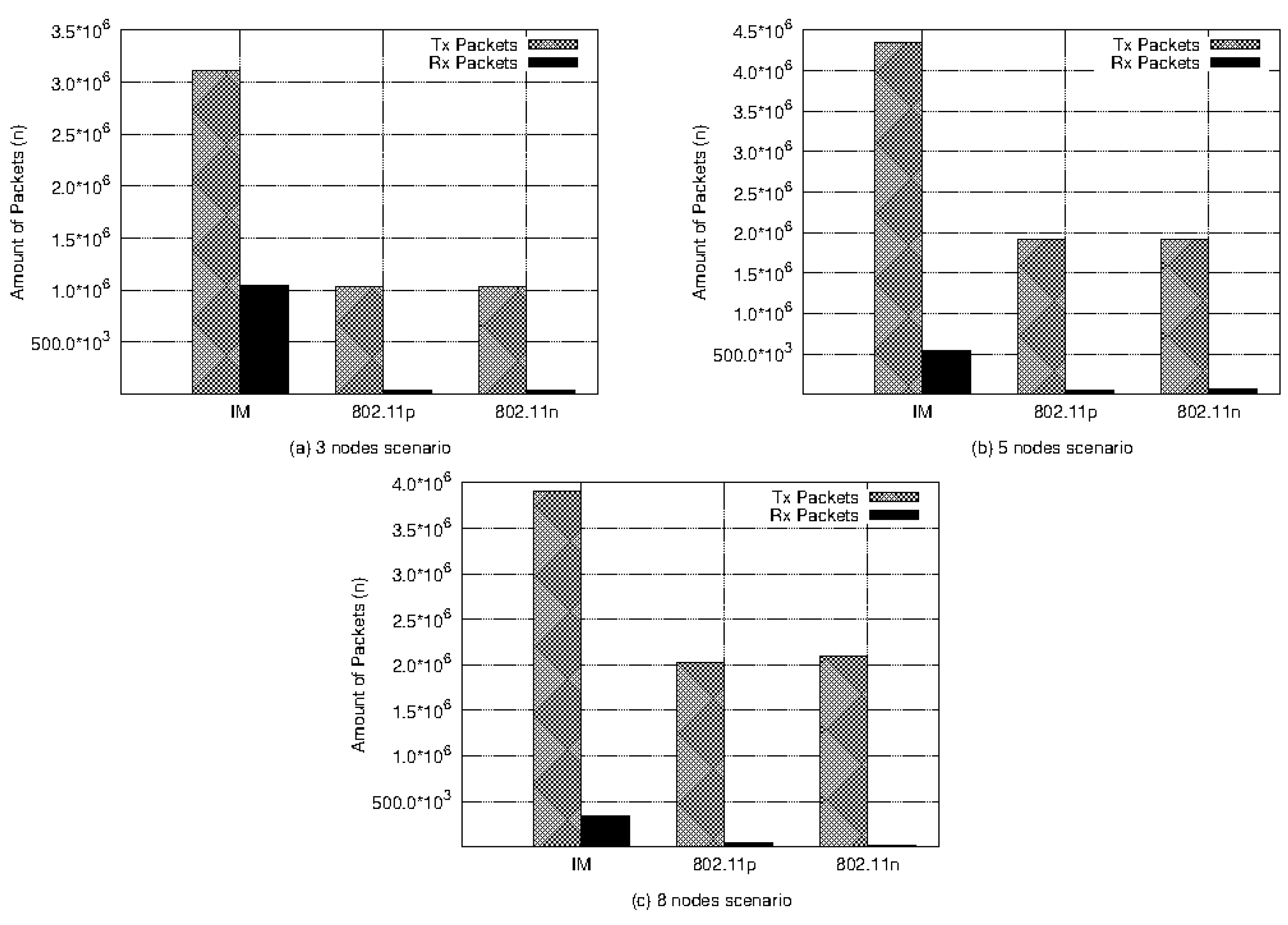
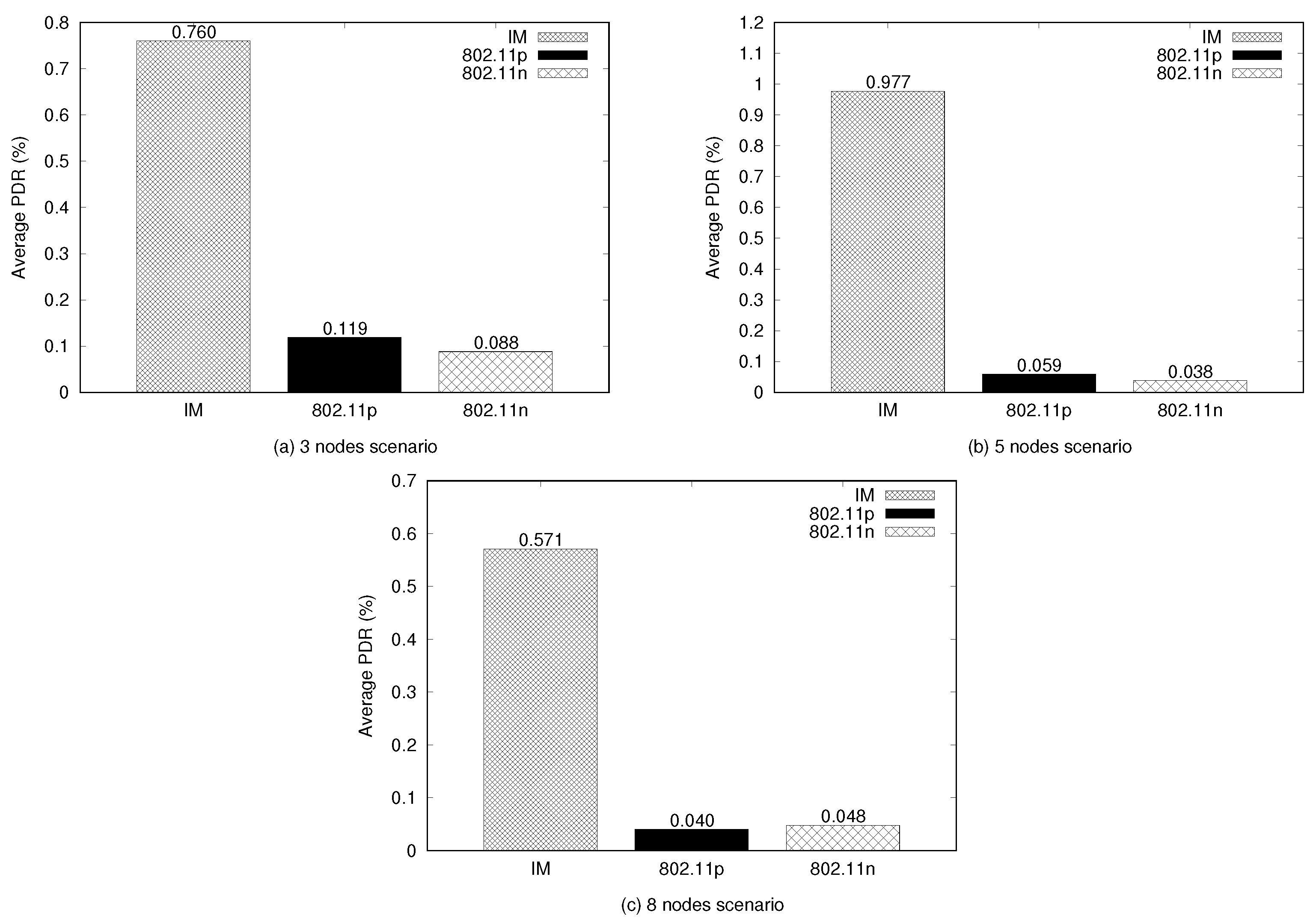
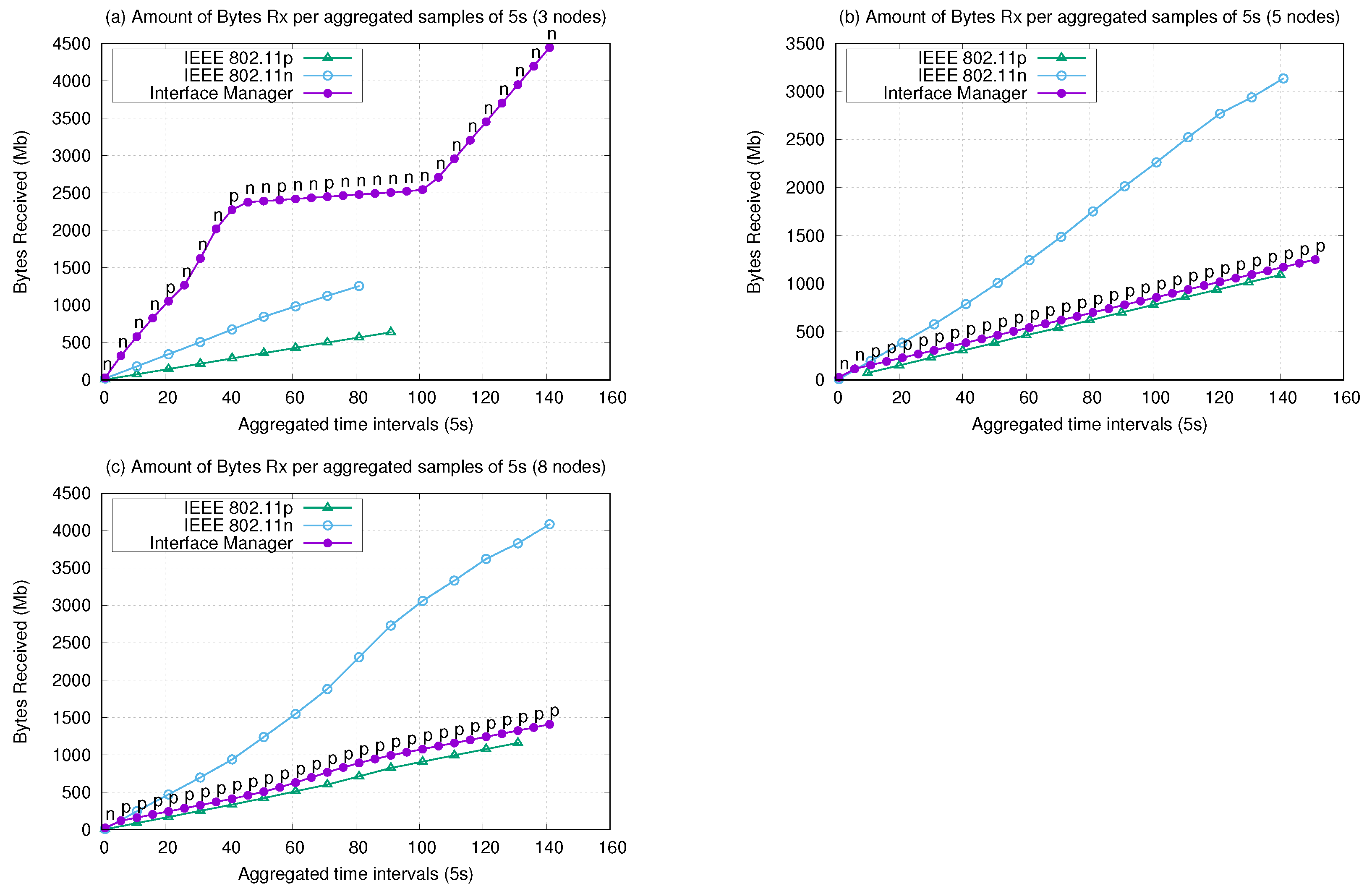
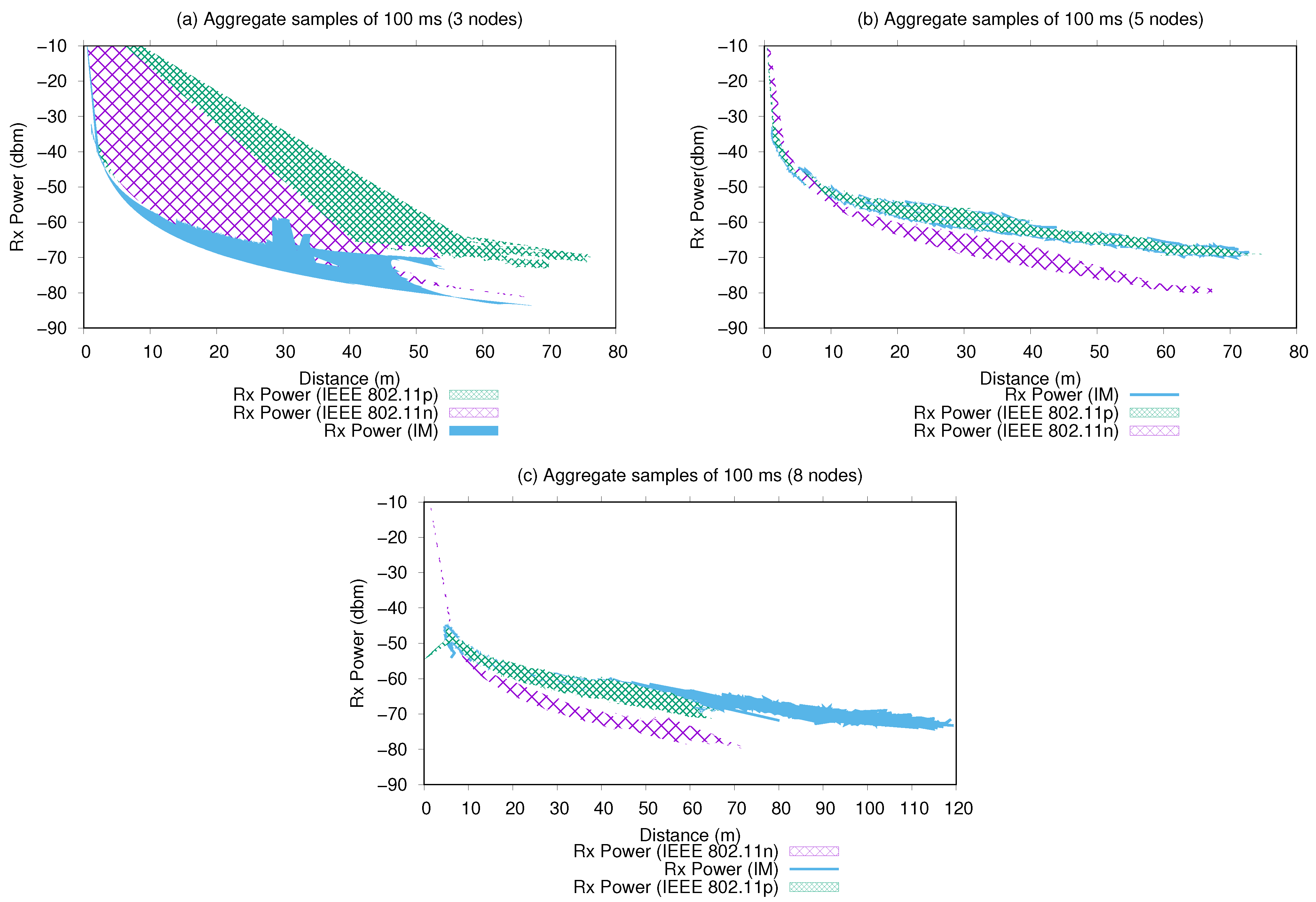
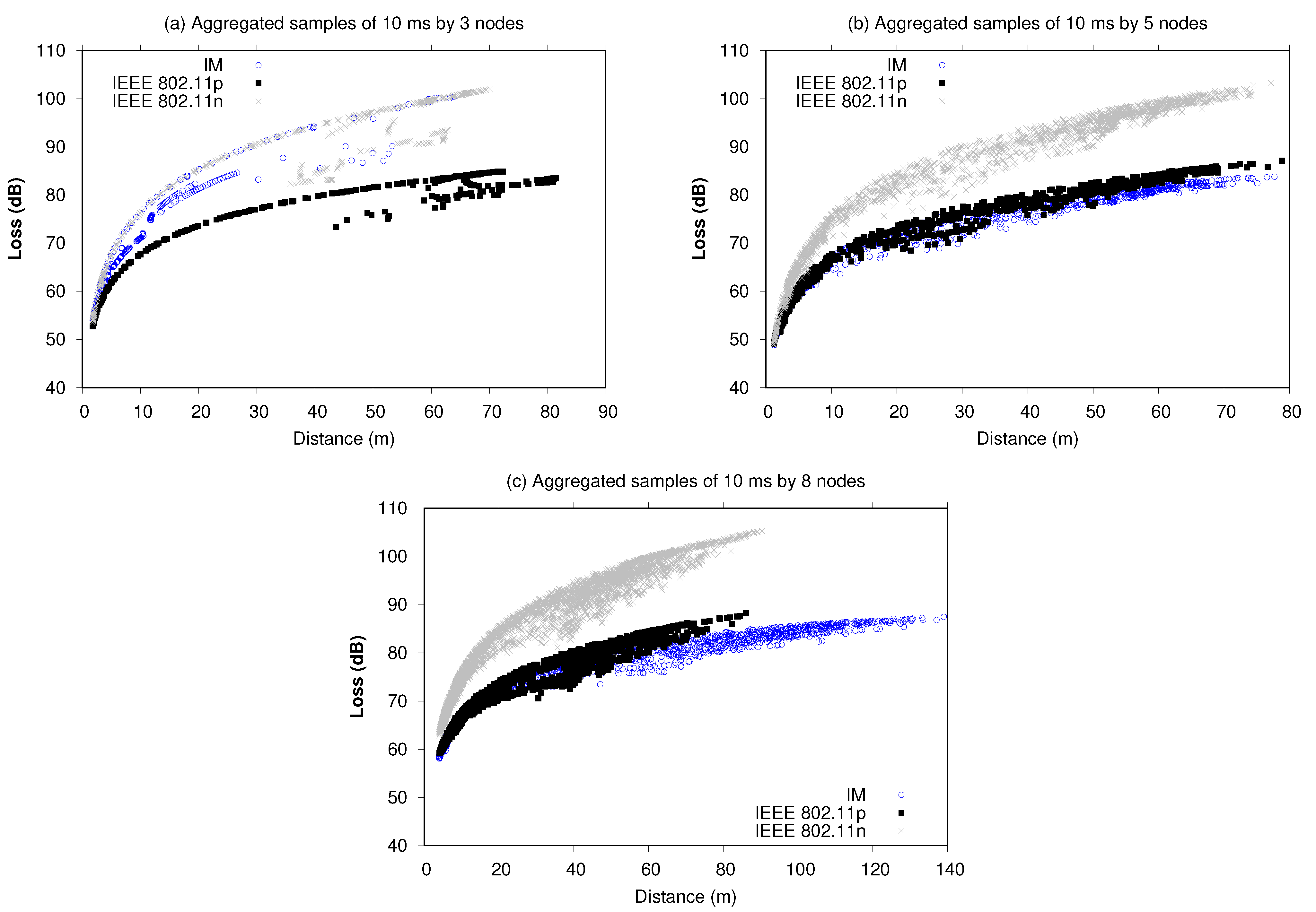
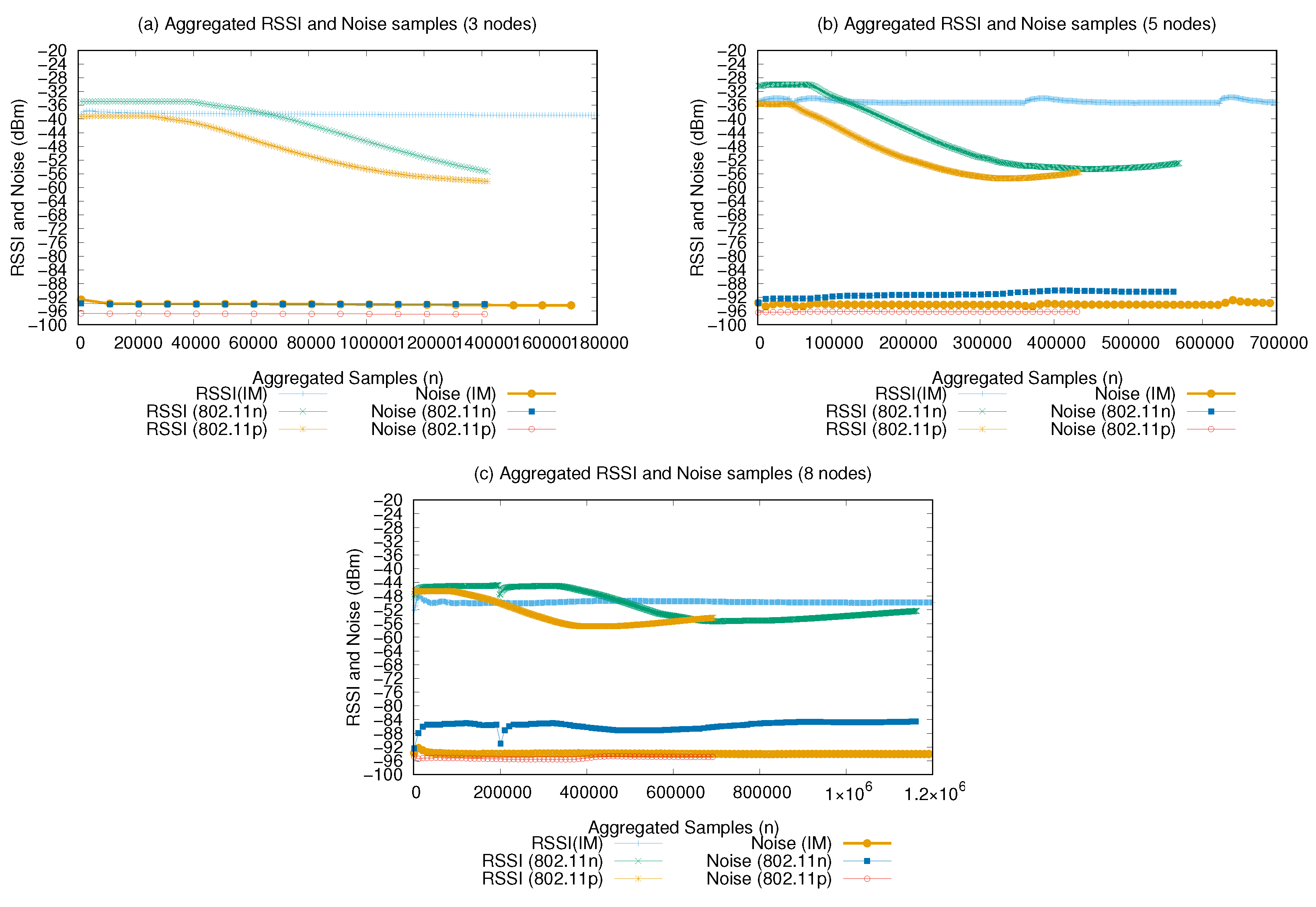
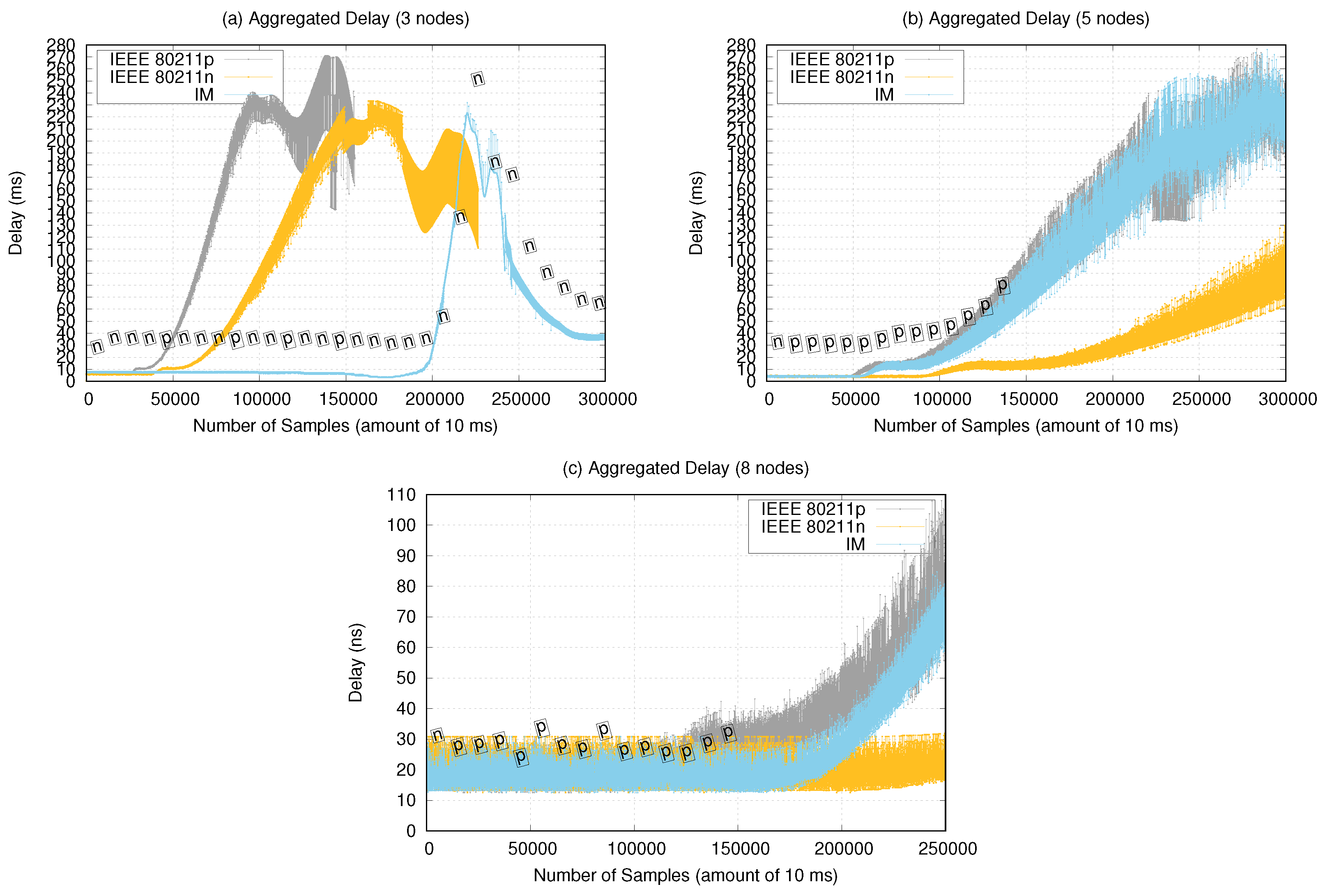
6.2. MAC and PHY Evaluation
6.3. Final Remarks
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Agrawal, D.P.; Zhang, S. Communication and networking of UAV-based systems: Classification and associated architectures. J. Netw. Comput. Appl. 2017, 84, 93–108. [Google Scholar] [CrossRef]
- Saleem, Y.; Rehmani, M.H.; Zeadally, S. Integration of Cognitive Radio Technology with Unmanned Aerial Vehicles. J. Netw. Comput. Appl. 2015, 50, 15–31. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless Communications with Unmanned Aerial Vehicles: Opportunities and Challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Yanmaz, E.; Yahyanejad, S.; Rinner, B.; Hellwagner, H.; Bettstetter, C. Drone networks: Communications, coordination, and sensing. Ad Hoc Netw. 2018, 68, 1–15. [Google Scholar] [CrossRef]
- Menegol, M.; Hübner, J.; Becker, L. Evaluation of Multi-Agent Coordination on Embedded Systems; Springer: Cham, Switzerland, 2018; pp. 212–223. [Google Scholar] [CrossRef]
- Watanabe, T.; Takahashi, J.; Tobe, Y. Investigation of an Algorithm To Maximize the Information Observed by Multiple Autonomous UAVs. In Proceedings of the 2017 IEEE SENSORS, Glasgow, UK, 29 October–1 November 2017; pp. 3–5. [Google Scholar]
- Hui, K.P.; Pourbeik, P.; George, P.; Phillips, D.; Magrath, S.; Kwiatkowski, M. OPAL—A survivability-oriented approach to management of tactical military networks. In Proceedings of the IEEE Military Communications Conference MILCOM, Baltimore, MD, USA, 7–10 November 2011; pp. 1127–1132. [Google Scholar] [CrossRef]
- Hui, K.P.; Phillips, D.; Kekirigoda, A. Beyond line-of-sight range extension in contested environments with OPAL using autonomous unmanned aerial vehicles. In Proceedings of the 27th International Telecommunication Networks and Applications Conference, ITNAC 2017, Melbourne, VIC, Australia, 22–24 November 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Yanmaz, E.; Hayat, S.; Scherer, J.; Bettstetter, C. Experimental performance analysis of two-hop aerial 802.11 networks. In Proceedings of the Wireless Communications and Networking Conference (WCNC), Istanbul, Turkey, 6–9 April 2014; pp. 3118–3123. [Google Scholar]
- Scherer, J.; Rinner, B.; Yahyanejad, S.; Hayat, S.; Yanmaz, E.; Andre, T.; Khan, A.; Vukadinovic, V.; Bettstetter, C.; Hellwagner, H. An Autonomous Multi-UAV System for Search and Rescue. In Proceedings of the First Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use—DroNet ’15, Florence, Italy, 18 May 2015; pp. 33–38. [Google Scholar] [CrossRef]
- Sahingoz, O.K.; Okulu, H.H. Networking Models in Flying Ad-Hoc Networks (FANETs): Concepts and Networking Models in Flying Ad-Hoc Networks (FANETs): Concepts and Challenges. J. Intell. Robot. Syst. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Monteiro, A.; Souto, E.; Pazzi, R.; Nogueira, M. Context-aware network selection in heterogeneous wireless networks. Comput. Commun. 2019, 135, 1–15. [Google Scholar] [CrossRef]
- Lima, B.A.; Quevedo, C.H.O.O.; Marques, H.P.; Moreira, D.A.B.; Gomes, R.L.; Celestino, J.; Ghamri-Doudane, Y. Improving the Communication of Heterogeneous Vehicular Networks through Clusterization. In Proceedings of the 2018 IEEE Symposium on Computers and Communications (ISCC), Natal, Brazil, 25–28 June 2018; pp. 590–595. [Google Scholar] [CrossRef]
- Ribeiro, L.M.B.; Buss Becker, L. Performance Analysis of IEEE 802.11p and IEEE 802.11n Based on QoS for UAV Networks. In Proceedings of the 9th ACM Symposium on Design and Analysis of Intelligent Vehicular Networks and Applications, Miami Beach, FL, USA, 25–28 November 2019; DIVANet ’19. Association for Computing Machinery: New York, NY, USA, 2019; pp. 65–71. [Google Scholar] [CrossRef] [Green Version]
- Hussen, H.R.; Choi, S.; Park, J.; Kim, J. Performance Analysis of MANET Routing Protocols for UAV Communications. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; pp. 70–72. [Google Scholar] [CrossRef]
- Teixeira, F.; Santos, J.; Pessoa, L.; Pereira, M.; Campos, R.; Ricardo, M. Evaluation of Underwater IEEE 802.11 Networks at VHF and UHF Frequency Bands Using Software Defined Radios. In Proceedings of the 10th International Conference on Underwater Networks & Systems, Arlington, VA, USA, 22–24 October 2015; WUWNET ’15. Association for Computing Machinery: New York, NY, USA, 2015. [Google Scholar] [CrossRef]
- Gielis, J.; Prorok, A. Improving 802.11p for Delivery of Safety-Critical Navigation Information in Robot-to-Robot Communication Networks. IEEE Commun. Mag. 2021, 59, 16–21. [Google Scholar] [CrossRef]
- Erdelj, M.; Krl, M.; Natalizio, E. Wireless Sensor Networks and Multi-UAV Systems for Natural Disaster Management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Sayyed, A.; de Araújo, G.M.; Bodanese, J.P.; Becker, L.B. Dual-stack single-radio communication architecture for UAV acting as a mobile node to collect data in WSNs. Sensors 2015, 15, 23376–23401. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bekmezci, I.; Sen, I.; Erkalkan, E. Flying Ad Hoc Networks ( FANET ) Test Bed Implementation. In Proceedings of the 2015 7th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 16–19 June 2015; pp. 665–668. [Google Scholar] [CrossRef]
- Lei, X.; Rhee, S.H. A new backoff scheme with collision detection for IEEE 802.11p vehicular networks. In Proceedings of the IEEE Vehicular Technology Conference, Toronto, ON, Canada, 24–27 September 2018; pp. 1–5. [Google Scholar]
- Sharma, V.; Bennis, M.; Kumar, R. UAV-Assisted Heterogeneous Networks for Capacity Enhancement. IEEE Commun. Lett. 2016, 20, 1207–1210. [Google Scholar] [CrossRef] [Green Version]
- Yoon, H.; Seok, H.; Lim, C.; Park, B. An Online SBAS Service to Improve Drone Navigation Performance in High-Elevation Masked Areas. Sensors 2020, 20, 3047. [Google Scholar] [CrossRef]
- Krasuski, K.; Wierzbicki, D. Application the SBAS/EGNOS Corrections in UAV Positioning. Energies 2021, 14, 739. [Google Scholar] [CrossRef]
- Karamchedu, V.P. A Path from Device-to-Device to UAV-to-UAV Communications. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Yokoyama, R.S.; Kimura, B.Y.L.; dos Santos Moreira, E. An architecture for secure positioning in a UAV swarm using RSSI-based distance estimation. ACM SIGAPP Appl. Comput. Rev. 2014, 14, 36–44. [Google Scholar] [CrossRef]
- Yamaguchi, S.P.; Karolonek, F. Autonomous Position Control of Multi-Unmanned Aerial Vehicle Network Designed for Long Range Wireless Data Transmission. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; Volume 7, pp. 5–10. [Google Scholar]
- Chang, B.Y.; Chen, Y.C.; Wang, L.C. Design and Implementation of UAV-enabled Flying Access Points. In Proceedings of the 2018 27th Wireless and Optical Communication Conference (WOCC), Hualien, Taiwan, 30 April–1 May 2018; pp. 3–4. [Google Scholar]
- Sayyed, A. Exploiting and Optimizing Mobility in Wireless Sensor Networks. Ph.D. Thesis, UFSC, Florianópolis, Brazil, 2016. Available online: http://tede.ufsc.br/teses/PEAS0232-T.pdf (accessed on 14 May 2021).
- Jiang, D.; Delgrossi, L. IEEE 802.11p: Towards an international standard for wireless access in vehicular environments. In Proceedings of the IEEE Vehicular Technology Conference, Marina Bay, Singapore, 11–14 May 2008; pp. 2036–2040. [Google Scholar] [CrossRef]
- IEEE 802.11p. IEEE Standard for Information technology—Local and metropolitan area networks—Specific requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments. In IEEE Std 802.11p-2010 (Amendment to IEEE Std 802.11-2007 as Amended by IEEE Std 802.11k-2008, IEEE Std 802.11r-2008, IEEE Std 802.11y-2008, IEEE Std 802.11n-2009, and IEEE Std 802.11w-2009); IEEE: Piscataway, NJ, USA, 2010; pp. 1–51. [Google Scholar] [CrossRef]
- Ribeiro, L.; Souto, E.; Becker, L.B. Multi-Factor Dynamic Channel Assignment approach for Wi-Fi networks. In Proceedings of the 2018 IEEE Symposium on Computers and Communications (ISCC), Natal, Brazil, 25–28 June 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Liu, D.; Xu, Y.; Xu, Y.; Wu, Q.; Jing, J.; Zhang, Y.; Anpalagan, A. Distributed relay selection for heterogeneous UAV communication networks using a many-to-many matching game without substitutability. In Proceedings of the 2017 IEEE/CIC International Conference on Communications in China, ICCC 2017, Qingdao, China, 22–24 October 2018; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Park, J.H.; Choi, S.C.; Kim, J.; Won, K.H. Unmanned Aerial System Traffic Management with WAVE Protocol for Collision Avoidance. In Proceedings of the International Conference on Ubiquitous and Future Networks, ICUFN, Prague, Czech Republic, 3–6 June 2018; pp. 8–10. [Google Scholar] [CrossRef]
- Kaidenko, M.; Kravchuk, S. Creation of communication system for unmanned aerial vehicles using SDR and SOC technologies. In Proceedings of the 2019 International Conference on Information and Telecommunication Technologies and Radio Electronics (UkrMiCo), Odessa, Ukraine, 9–13 September 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Raimundo, A.; Fernandes, D.; Gomes, D.; Postolache, O.; Sebastião, P.; Cercas, F. UAV GNSS Position Corrections based on IoT™ Communication Protocol. In Proceedings of the 2018 International Symposium in Sensing and Instrumentation in IoT Era (ISSI), Shanghai, China, 6–7 September 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Hazra, K.; Shah, V.K.; Roy, S.; Deep, S.; Saha, S.; Nandi, S. Exploring Biological Robustness for Reliable Multi-UAV Networks. IEEE Trans. Netw. Serv. Manag. 2021. [Google Scholar] [CrossRef]
- Yanmaz, E. Dynamic Relay Selection and Positioning for Cooperative UAV Networks. IEEE Netw. Lett. 2021. [Google Scholar] [CrossRef]
- Ribeiro, L.; Muller, I.; Becker, L. Gerenciamento de interfaces para prover comunicação heterogênea em redes compostas por múltiplos UAVs. In Proceedings of the Anais Estendidos do X Simpósio Brasileiro de Engenharia de Sistemas Computacionais, SBC: Virtual Event, 23–27 November 2020; pp. 49–56. [Google Scholar] [CrossRef]
- Urso, F.D.; Santoro, C.; Santoro, F.F.; Doria, V.A. Integrating Heterogeneous Tools for Physical Simulation of multi-Unmanned Aerial Vehicles. In Proceedings of the 19th Workshop “From Objects to Agents”, Palermo, Italy, 28–29 June 2018; pp. 10–15. [Google Scholar]
- Ribeiro, L.M. Interface Manager for MUAV Networks. Available online: https://github.com/LAURAMICHAELLA/HeterWIrelessMUAVNet (accessed on 14 May 2021).
- Fazeldehkordi, E.; Amiri, I.S.; Akanbi, O.A. Chapter 2 - Literature Review. In A Study of Black Hole Attack Solutions; Fazeldehkordi, E., Amiri, I.S., Akanbi, O.A., Eds.; Syngress: Rockland, MA, USA, 2016; pp. 7–57. [Google Scholar] [CrossRef]
- Wishnu, A.; Sugiantoro, B. Analysis Of Quality Of Service (Qos) Youtube Streaming Video Service In Wireless Network In The Environment Faculty Of Science And Technology Uin Sunan Kalijaga. Int. J. Inform. Dev. 2019, 7, 30. [Google Scholar] [CrossRef]
- Geier, J. Designing and Deploying 802.11n Wireless Nwtworks; Pearson Education: London, UK, 2010; p. 529. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Condition () | Network Metric |
|---|---|
| Throughput | |
| Total Bytes Sent | |
| Total Bytes Received | |
| RSSI | |
| SNR |
| Parameter | Setting |
|---|---|
| Network Topology | Ad Hoc Networks |
| Attenuation Model | Friis Free Space |
| Tx power | 16.02 dBm (40 mW) |
| Maximum Speed | 10, 20, and 30 m/s |
| Fading Model | Nakagami |
| Gazebo Duration Time | 18 min (3), 1 h 30 min (5), 2 h (8) |
| Interface Manager Interval Decision | 1 s |
| Sample Interval | 10 ms,100 ms |
| Packet size | 1472 bytes |
| Interface A | IEEE 80211n 2.4 GHz |
| Range Int. A | 300 m |
| Channel Frequency Int. A | 2.432 GHz (CH 5-6) |
| Interface B | IEEE 80211p 5 GHz |
| Range Int. B | 350 m–1 km (theoretical) |
| Channel Frequency Int. B | 5.860 GHz (CH 172) |
| Experiment | Average End-to-End Delay (ms) | Latency (ms) | Flow (n) |
|---|---|---|---|
| 3-node IM | 2.34 × 10 | 29.112 | 45 |
| 3-node 802.11p | 1.44 × 10 | 0.008 | 8 |
| 3-node 802.11n | 4.50 × 10 | 28.835 | 8 |
| 5-node IM | 5.98 × 10 | 2.000 | 78 |
| 5-node 802.11p | 4.62 × 10 | 0.026 | 16 |
| 5-node 802.11n | 6.50 × 10 | 38.979 | 16 |
| 8-node IM | 2.37 × 10 | 2.137 | 123 |
| 8-node 802.11p | 4.15 × 10 | 0.146 | 28 |
| 8-node 802.11n | 1.02 × 10 | 38.210 | 28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ribeiro, L.M.B.; Müller, I.; Buss Becker, L. Communication Interface Manager for Improving Performance of Heterogeneous UAV Networks. Sensors 2021, 21, 4255. https://doi.org/10.3390/s21134255
Ribeiro LMB, Müller I, Buss Becker L. Communication Interface Manager for Improving Performance of Heterogeneous UAV Networks. Sensors. 2021; 21(13):4255. https://doi.org/10.3390/s21134255
Chicago/Turabian StyleRibeiro, Laura Michaella Batista, Ivan Müller, and Leandro Buss Becker. 2021. "Communication Interface Manager for Improving Performance of Heterogeneous UAV Networks" Sensors 21, no. 13: 4255. https://doi.org/10.3390/s21134255
APA StyleRibeiro, L. M. B., Müller, I., & Buss Becker, L. (2021). Communication Interface Manager for Improving Performance of Heterogeneous UAV Networks. Sensors, 21(13), 4255. https://doi.org/10.3390/s21134255