
CMPC: An Innovative Lidar-Based Method to Estimate Tree Canopy Meshing-Profile Volumes for Orchard Target-Oriented Spray



Abstract
:1. Introduction
2. Materials and Methods
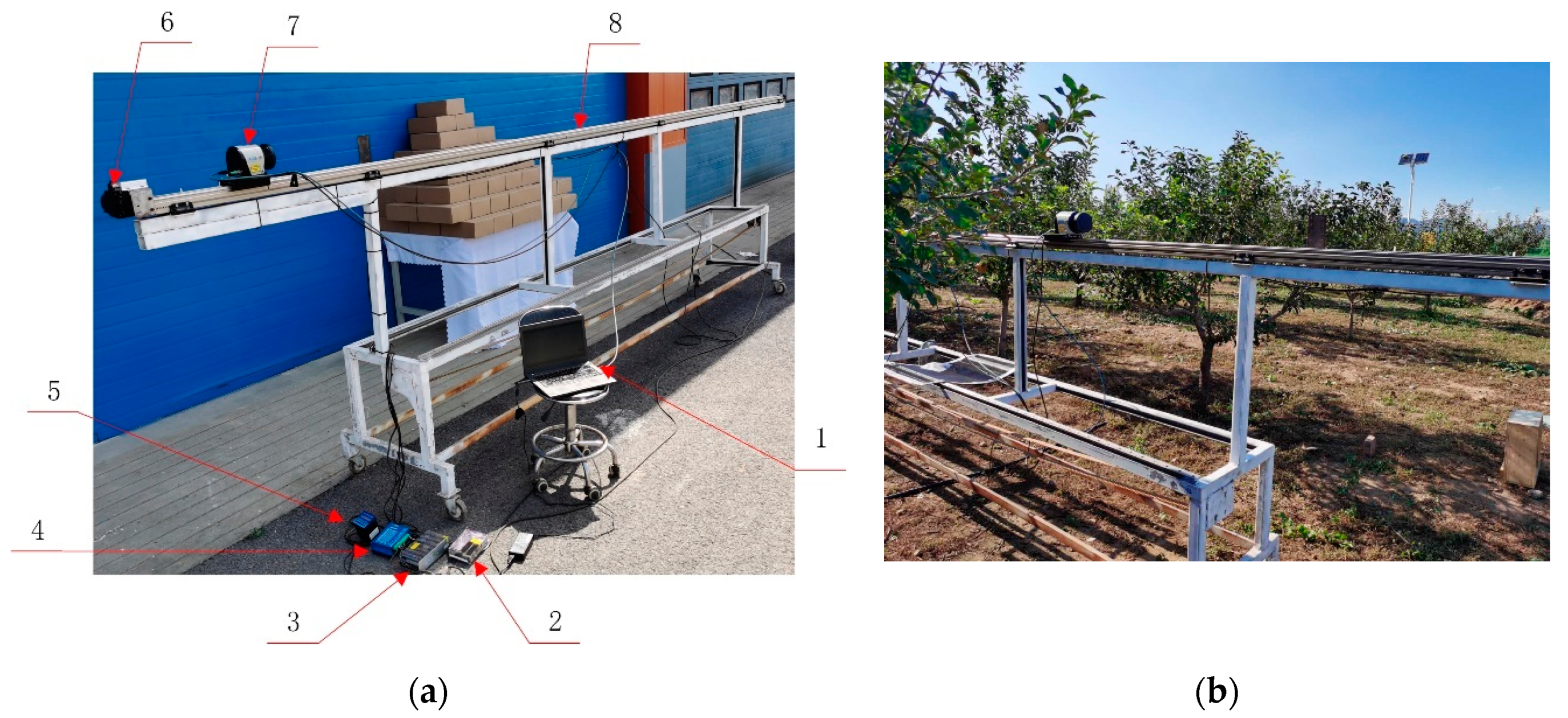
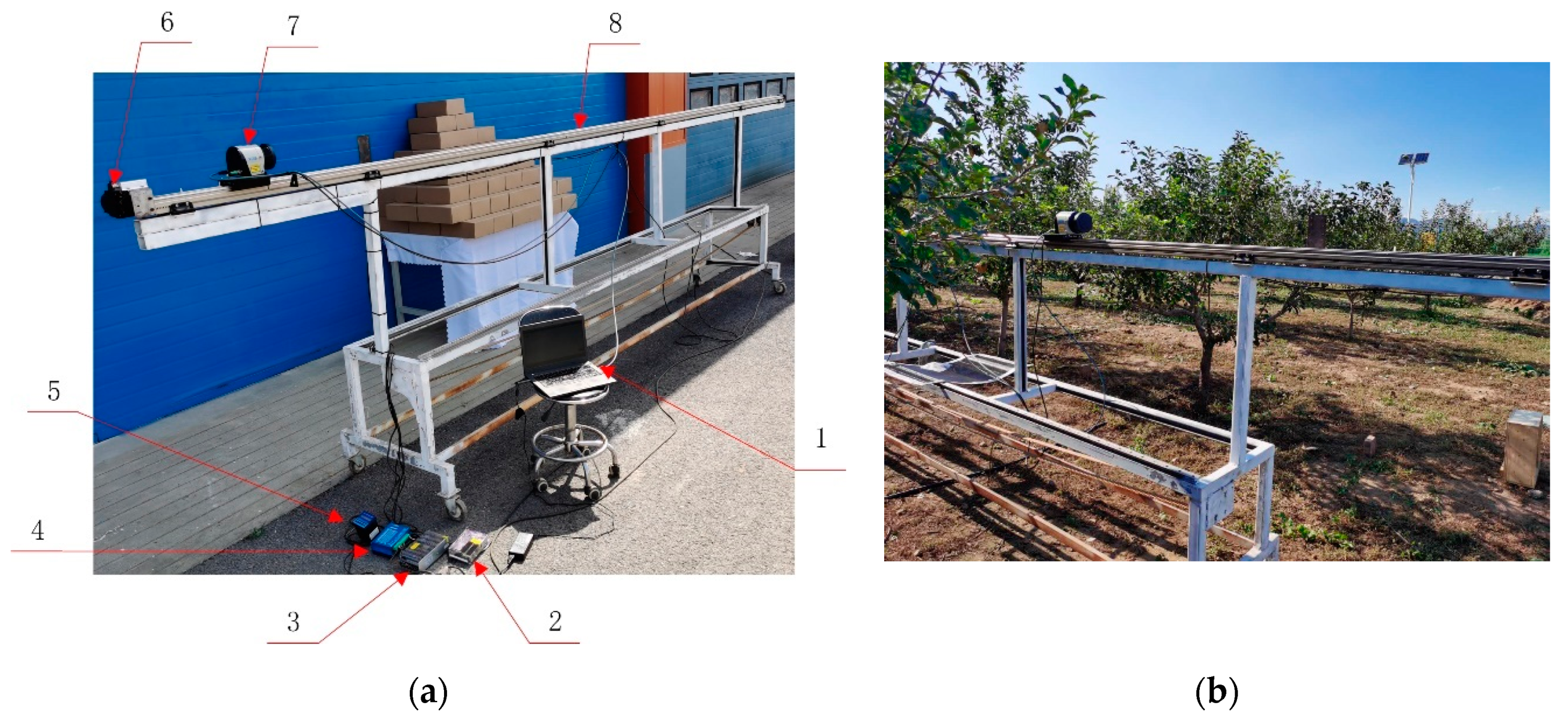
2.1. Data Acquisition Systems
2.1.1. LiDAR Subsection
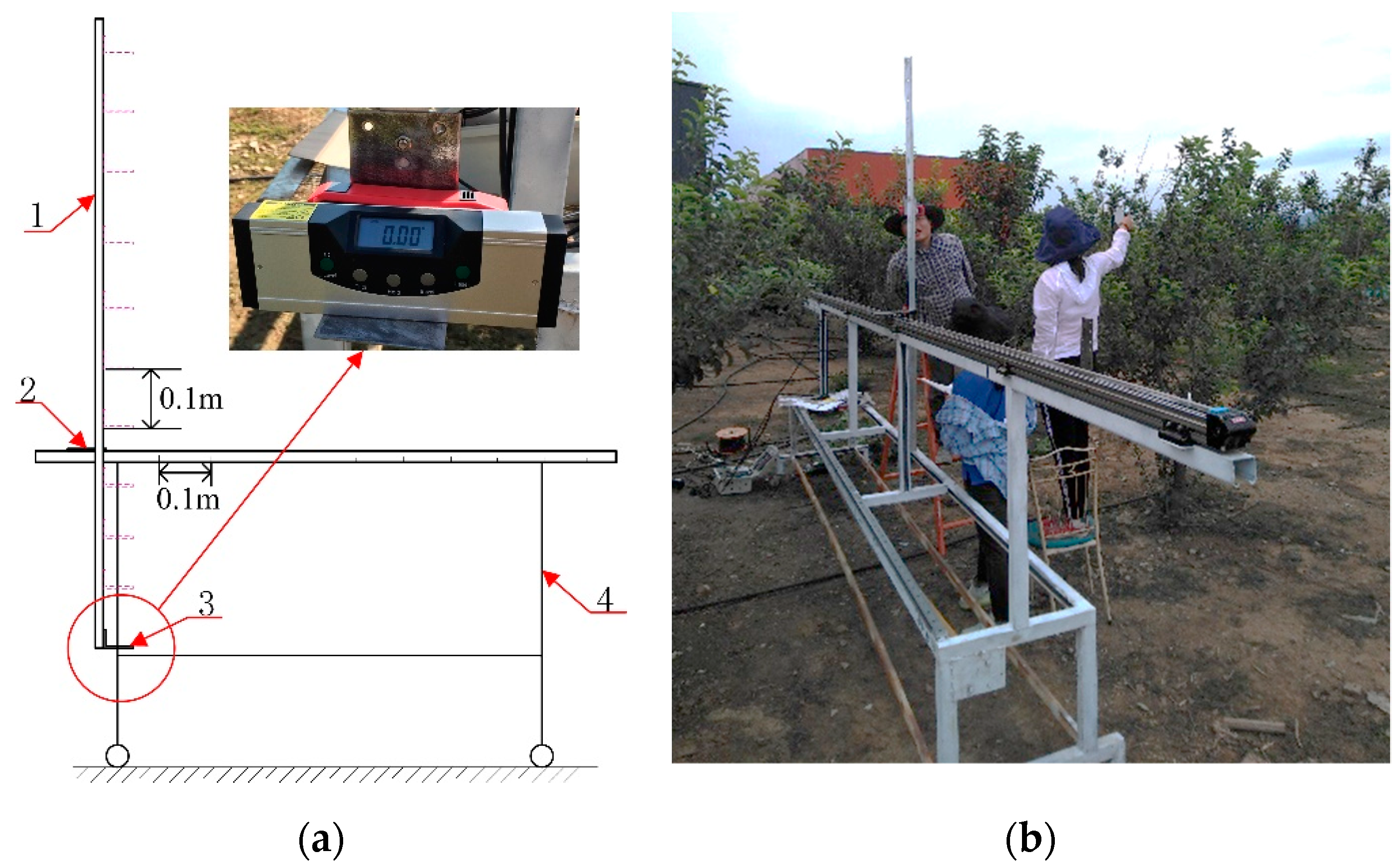
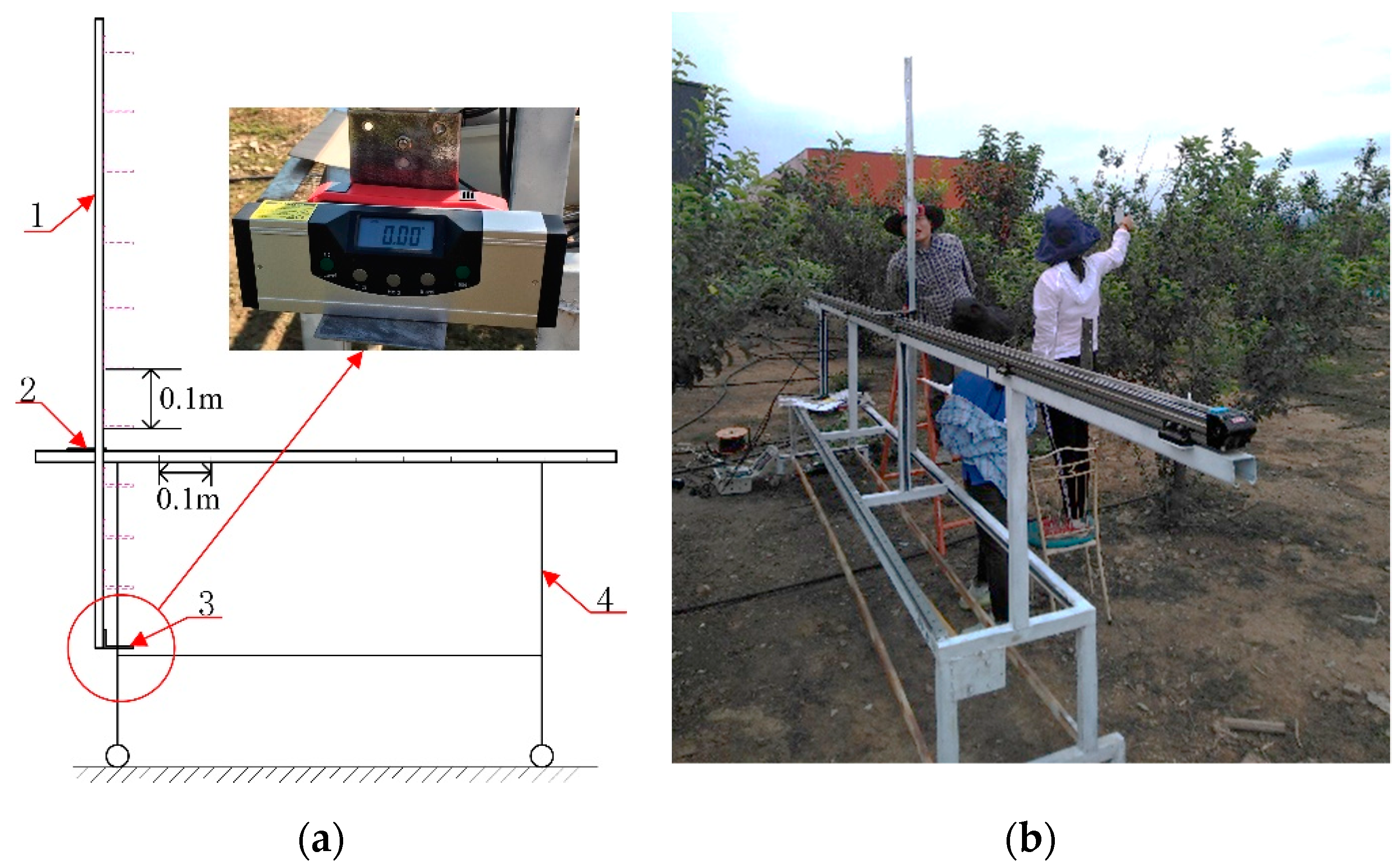
2.1.2. Manual Measurement System
2.2. Canopy Meshing-Profile Characterization (CMPC) Method and Data Processing Method
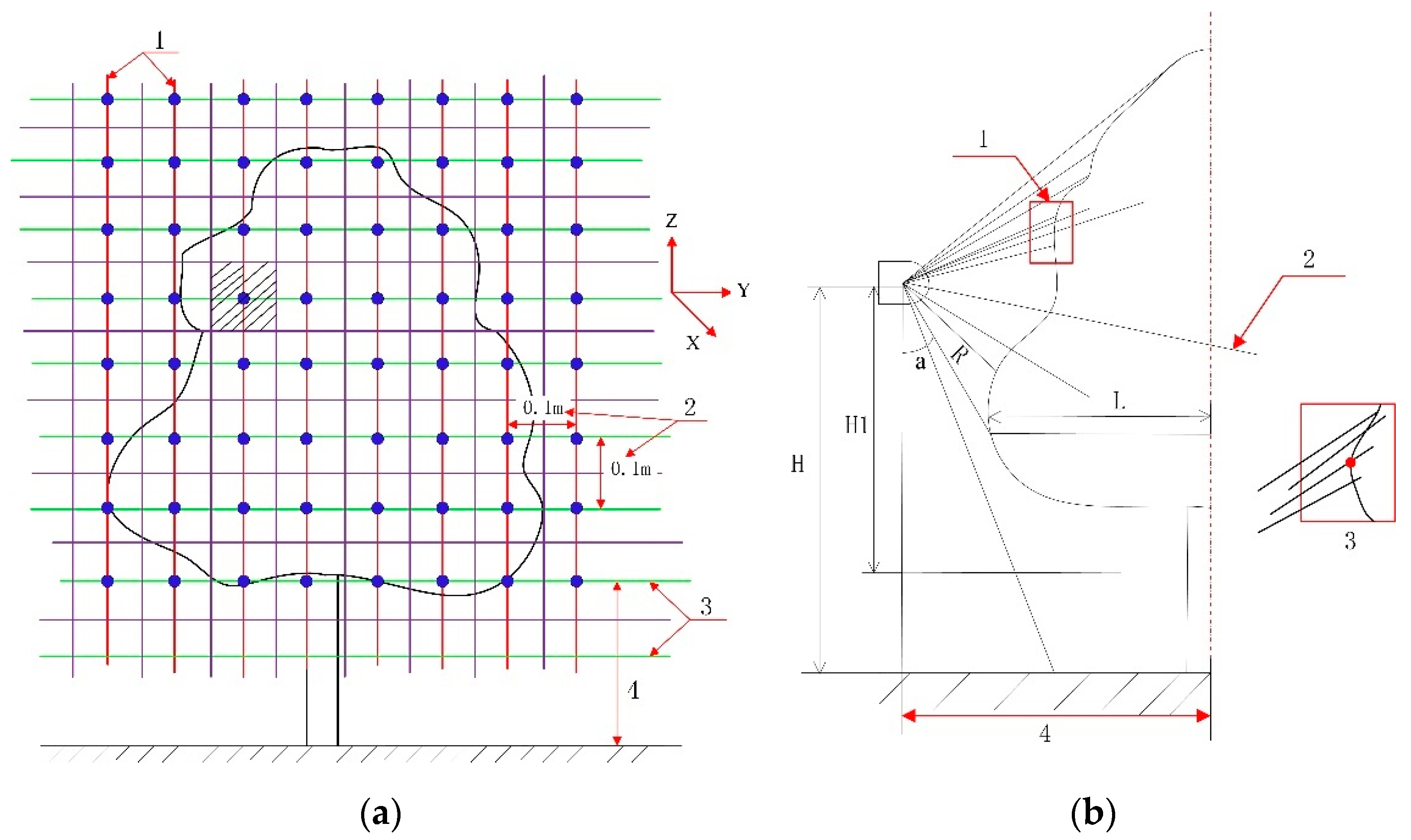
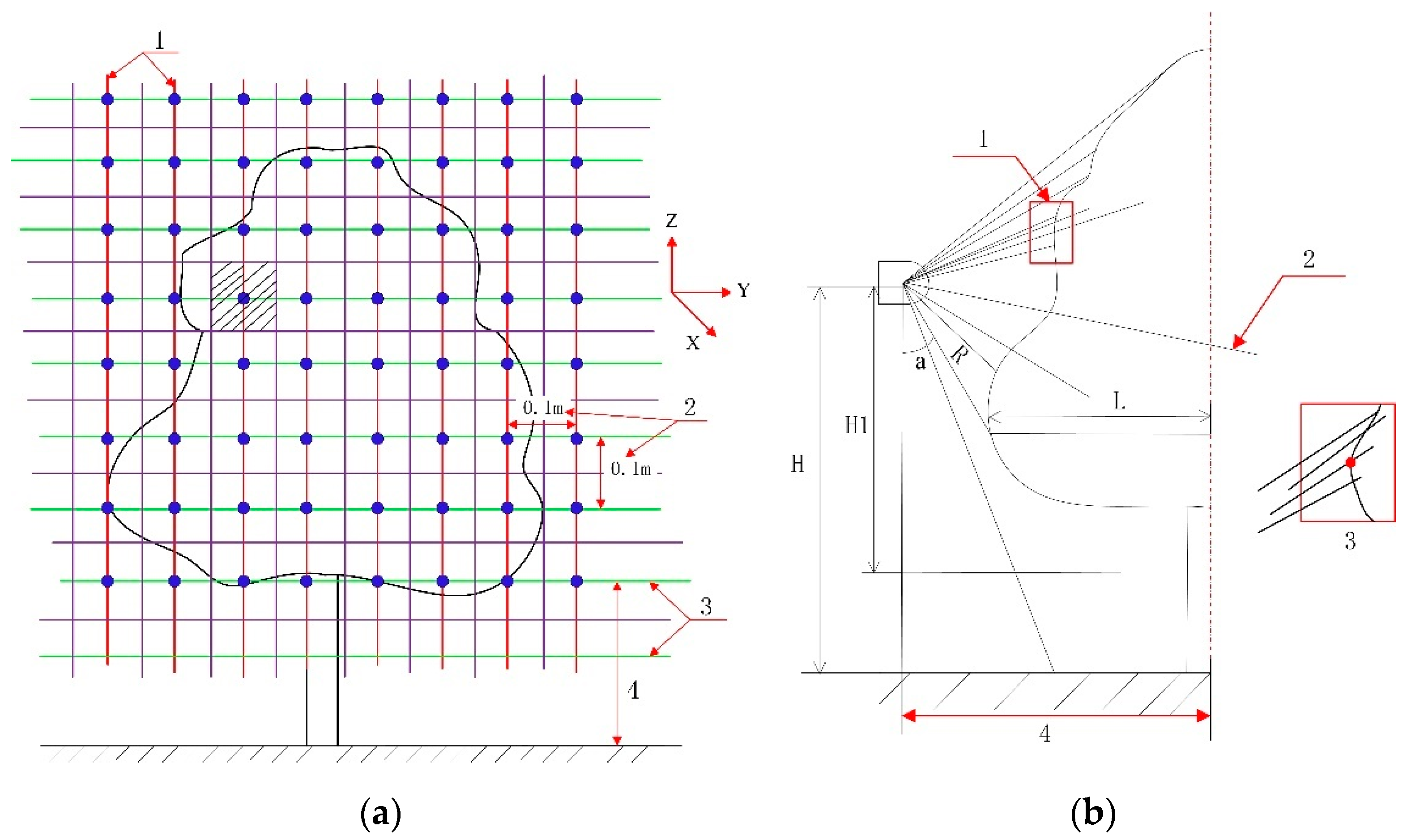
2.2.1. CMPC Method
2.2.2. Point-Cloud Density of Orchard Tree Canopy
2.2.3. Point-Cloud Data Processing
2.2.4. Calculation of Canopy Characteristic Parameters
2.3. Testing and Validation of CMPC Method
2.3.1. Experiments with Simulated Canopy in the Laboratory
2.3.2. Target Orchard Tree
2.3.3. Field Experiment
2.3.4. Validation of CMPC Method
3. Results
3.1. Analysis of LiDAR Measurements Errors Due to the Sliding Platform
3.2. Analysis of Results from the Simulated Canopy
3.3. Results of CMPC Method
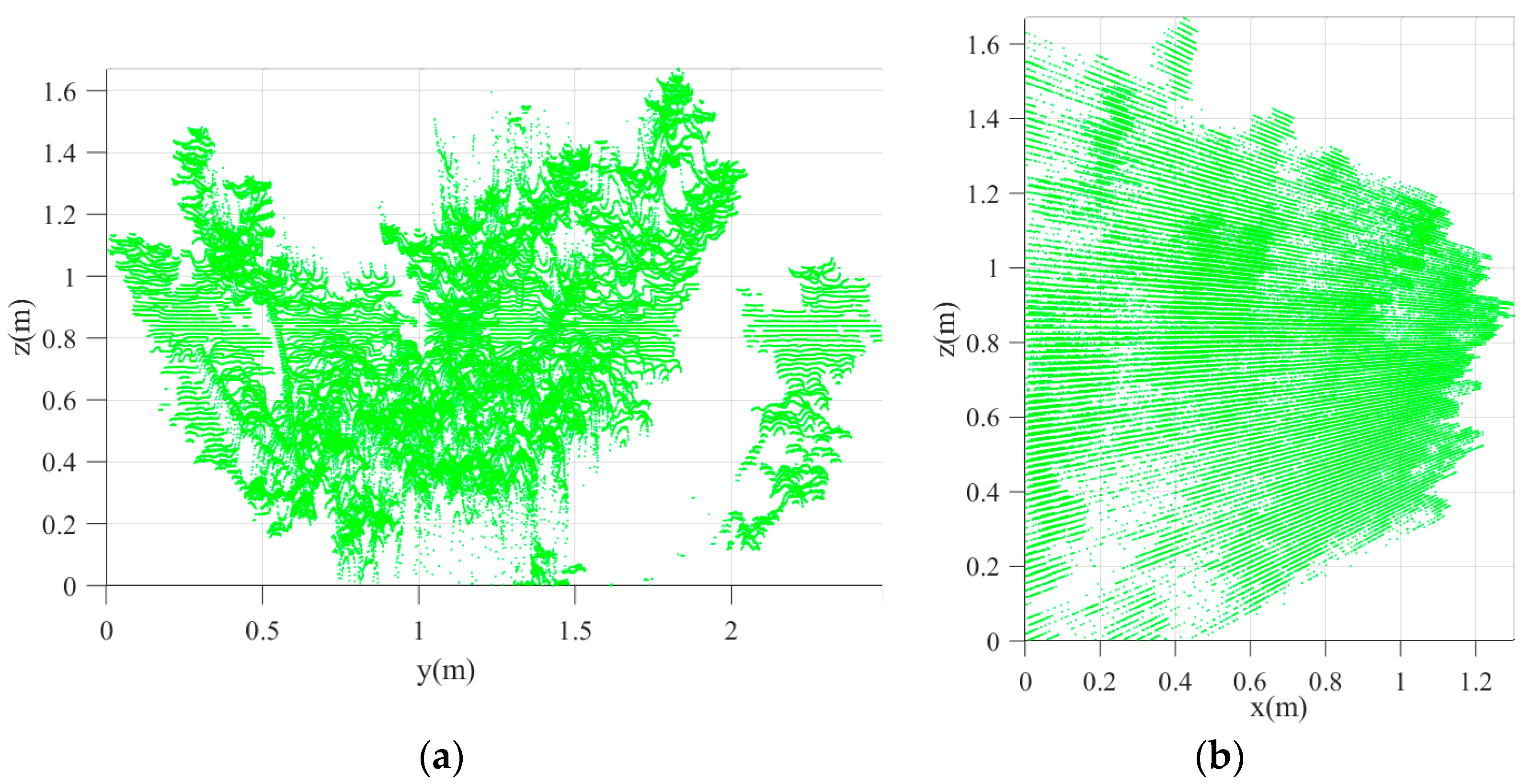
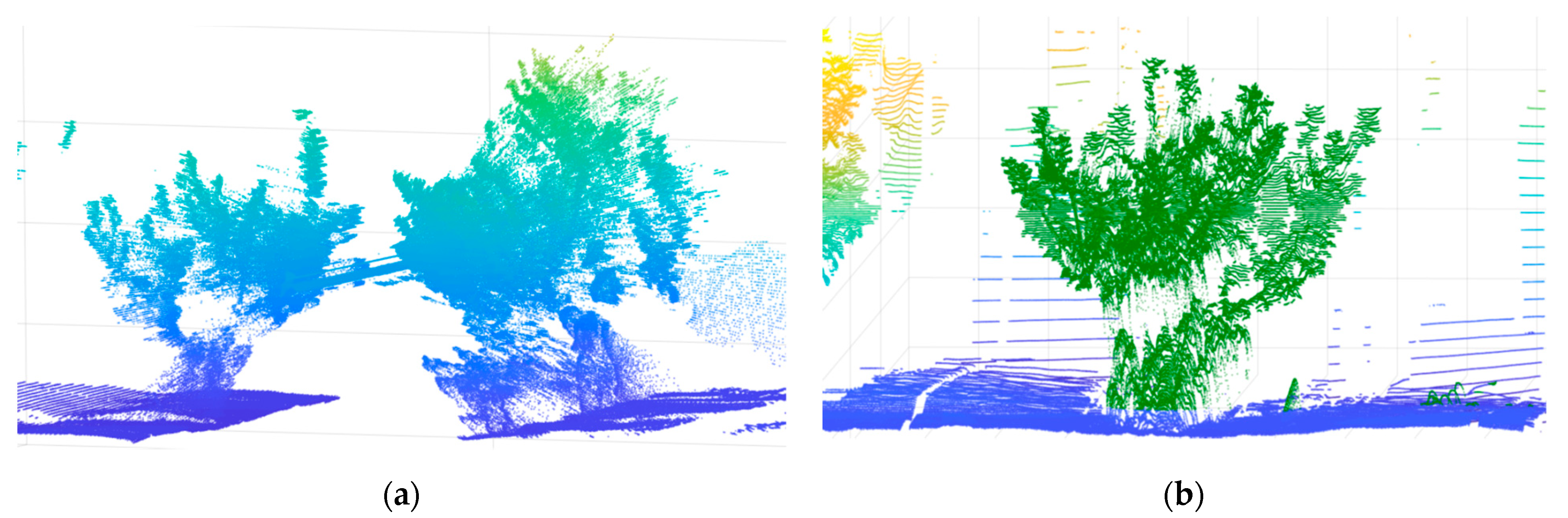
3.3.1. 3D Point Cloud of Orchard Tree Canopy
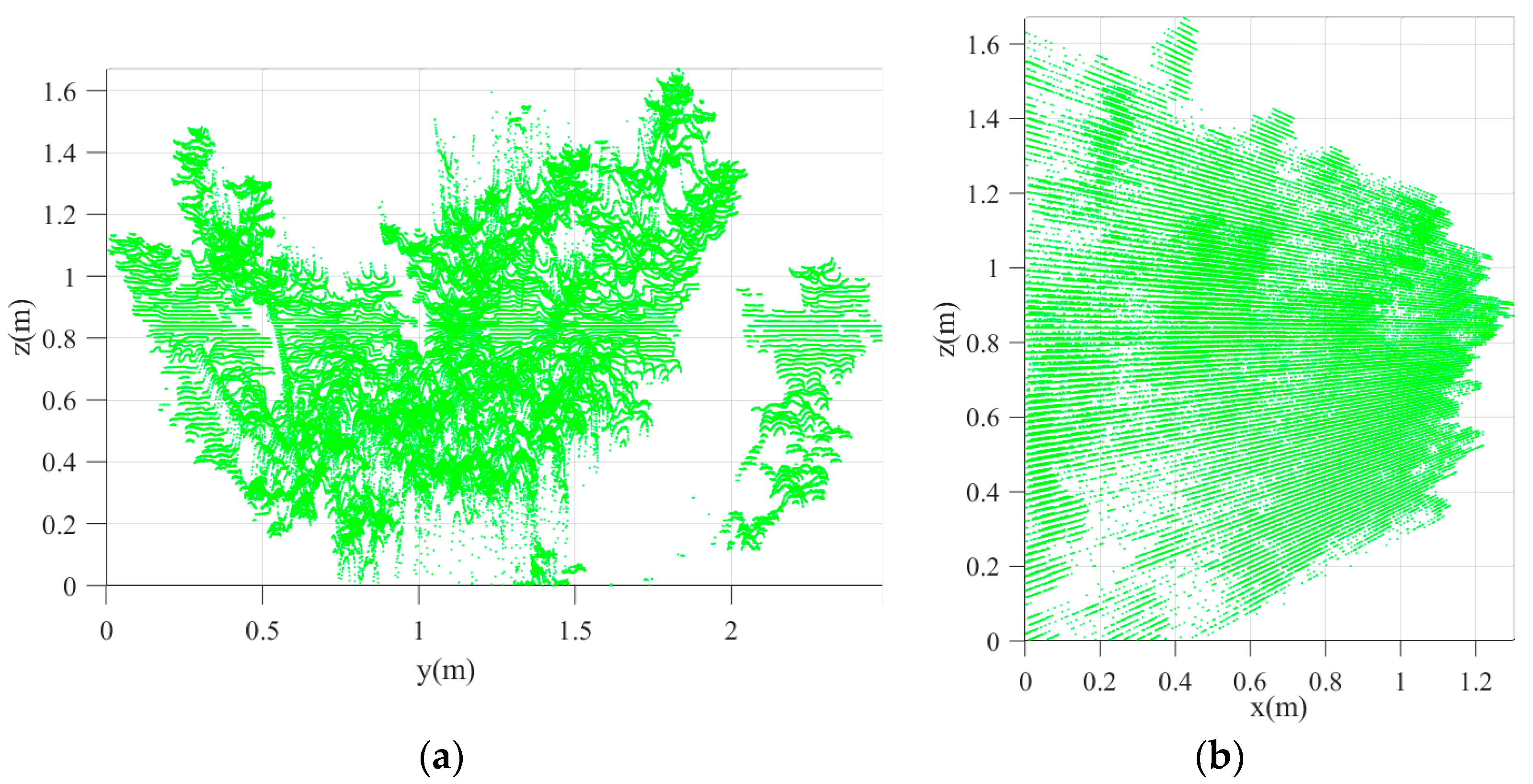
3.3.2. Extraction and Filtering of Lidar Point-Cloud Data
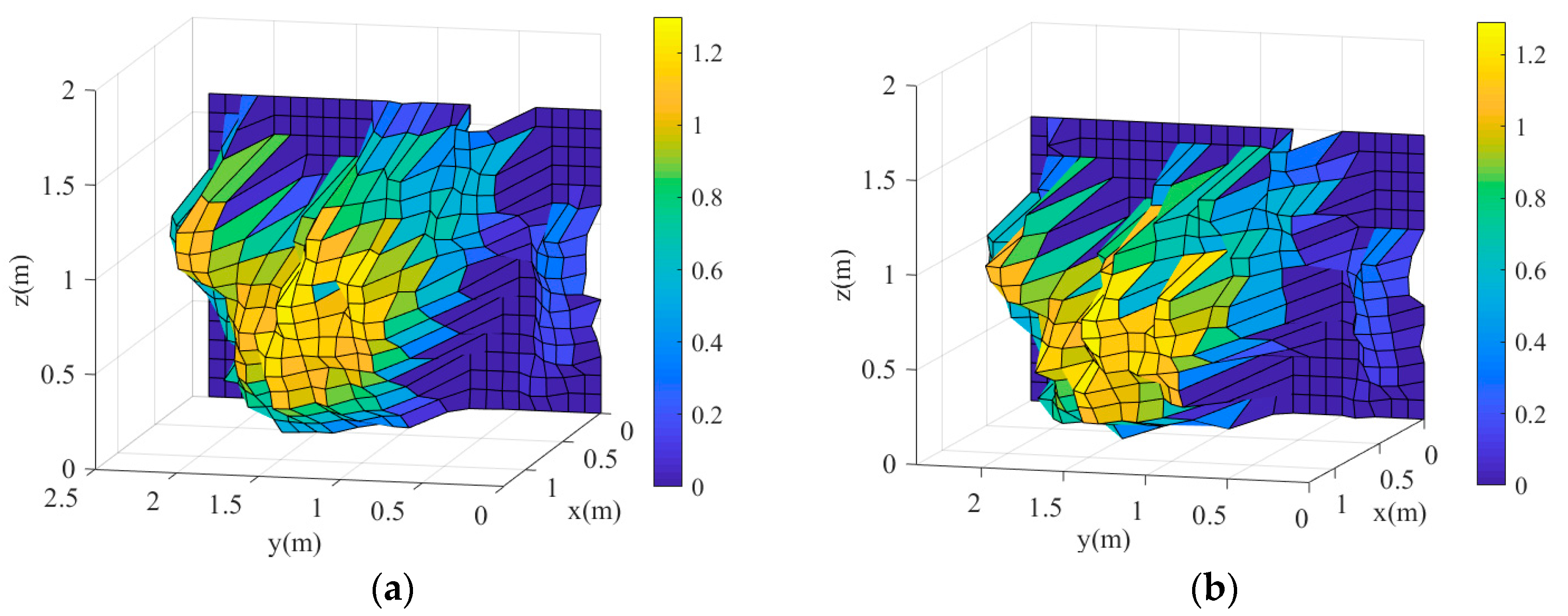
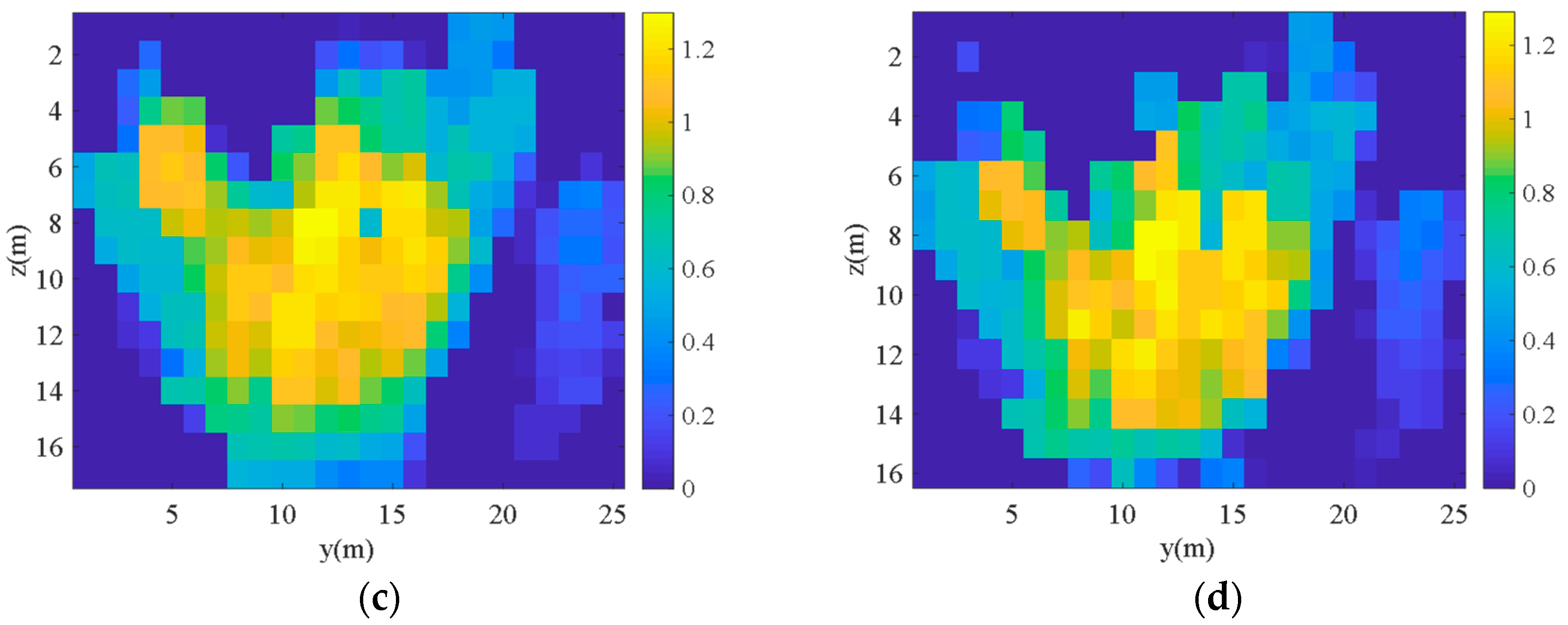
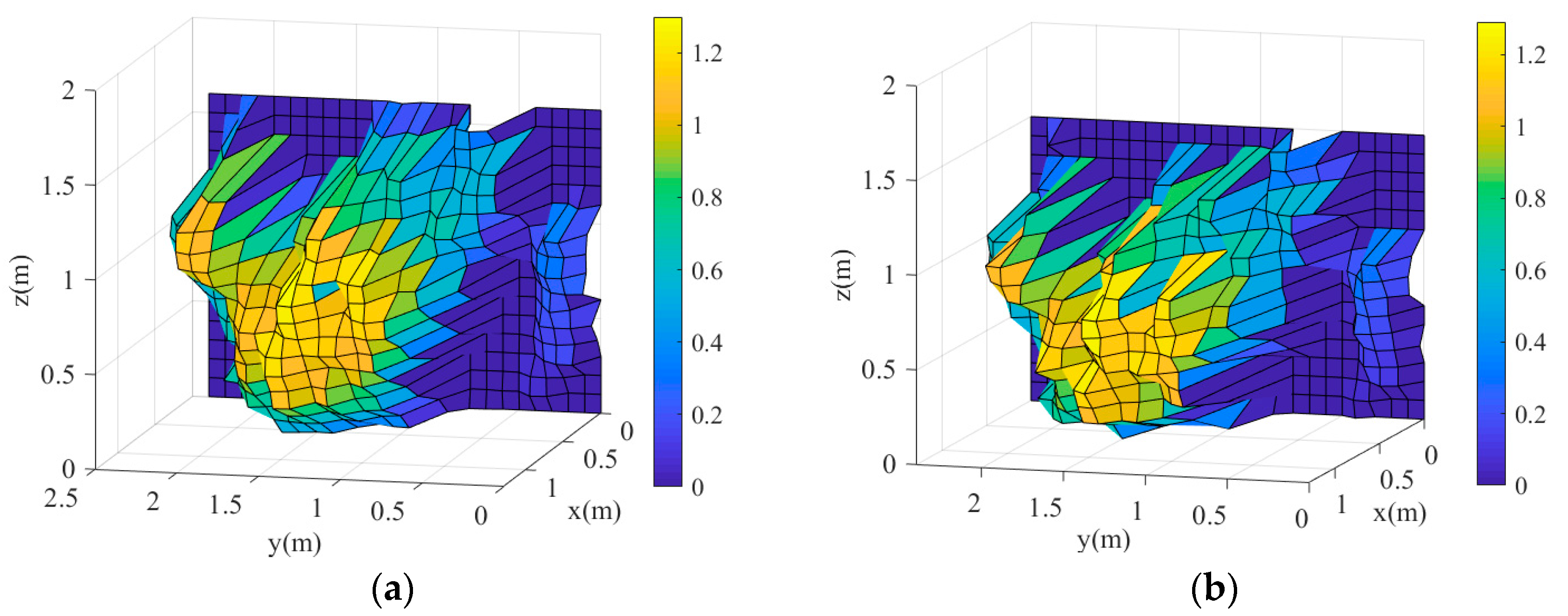
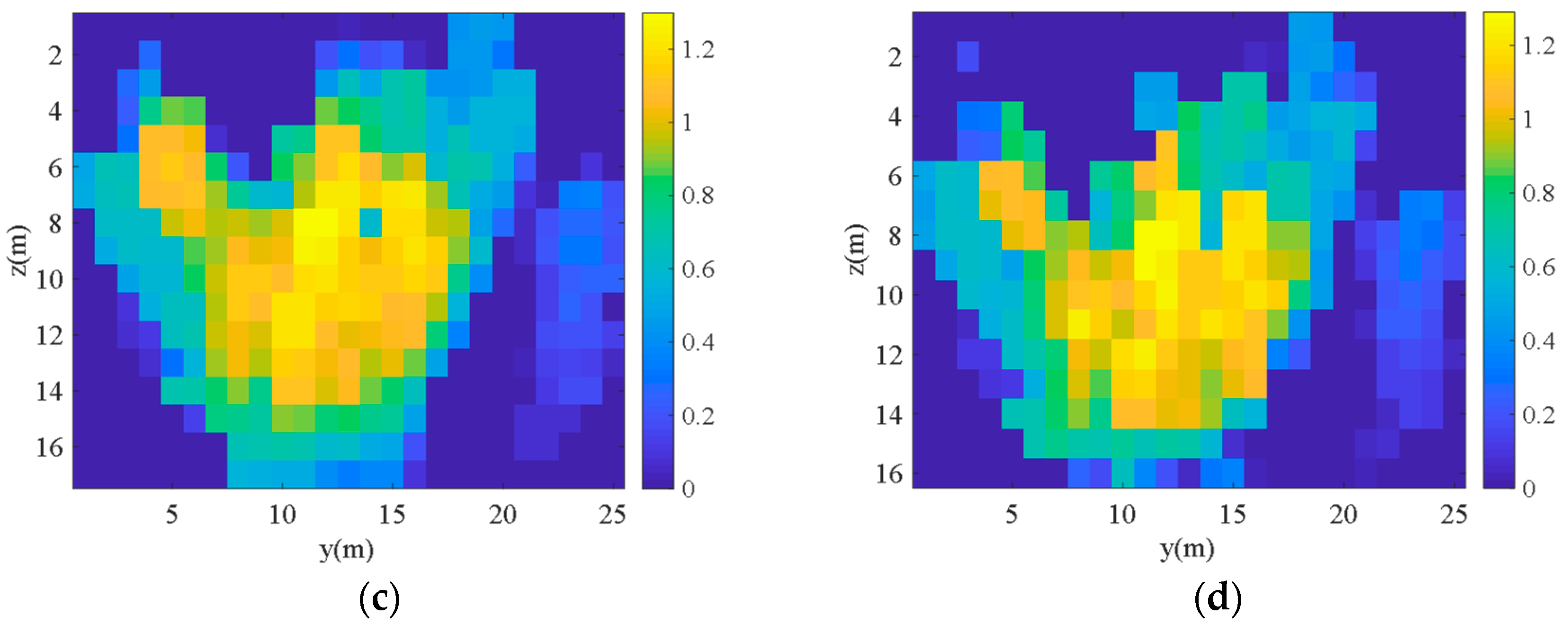
3.3.3. 2D and 3D Maps of Canopy
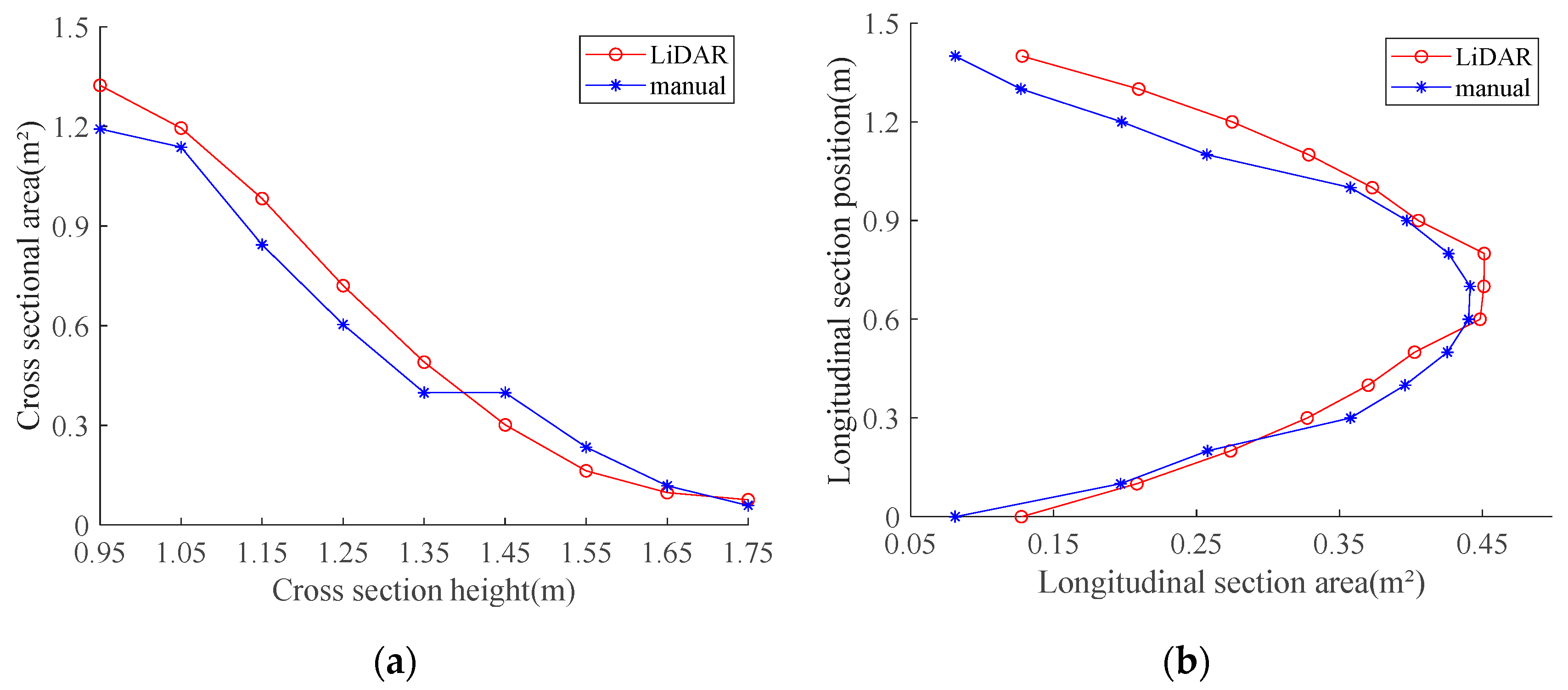
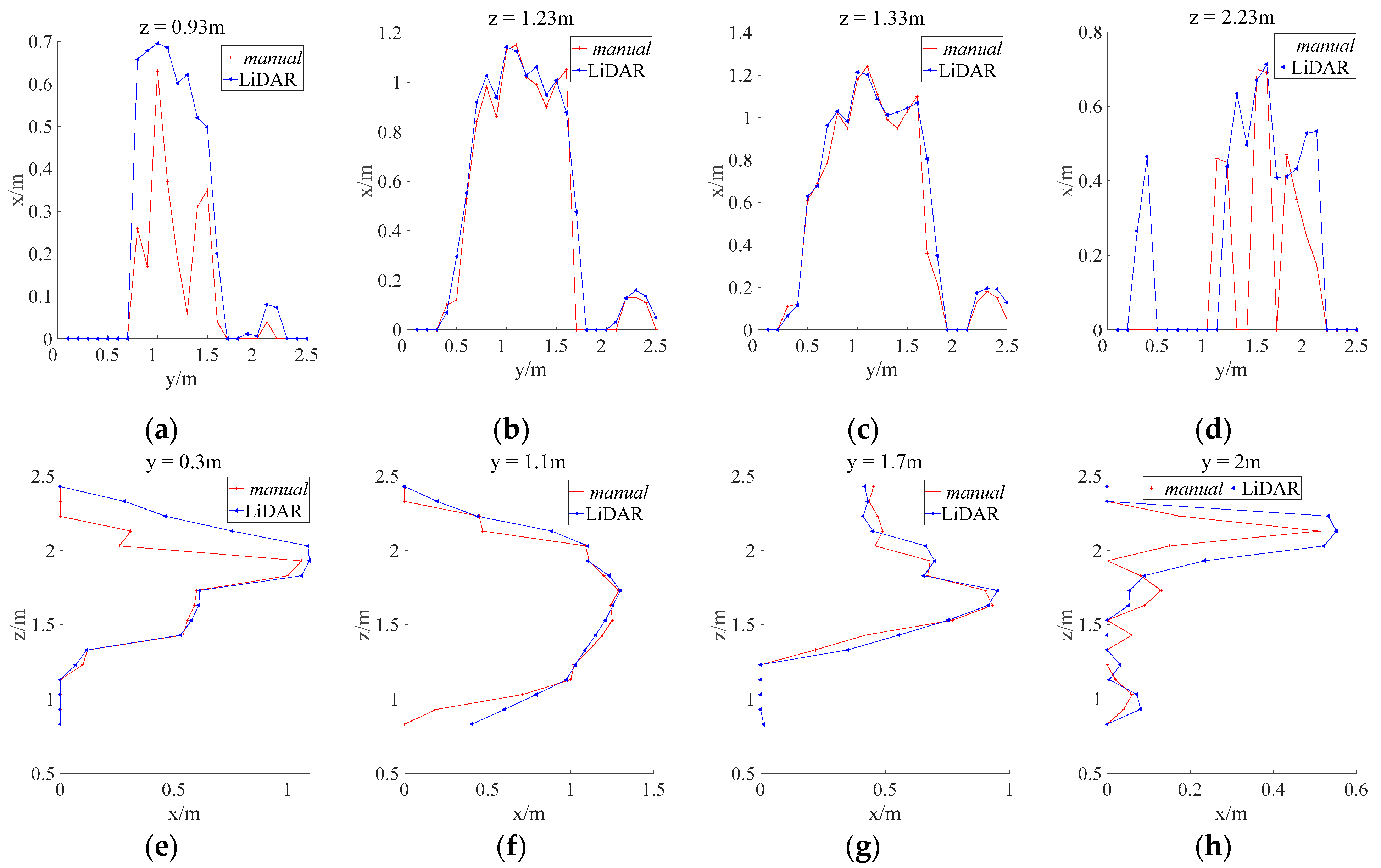
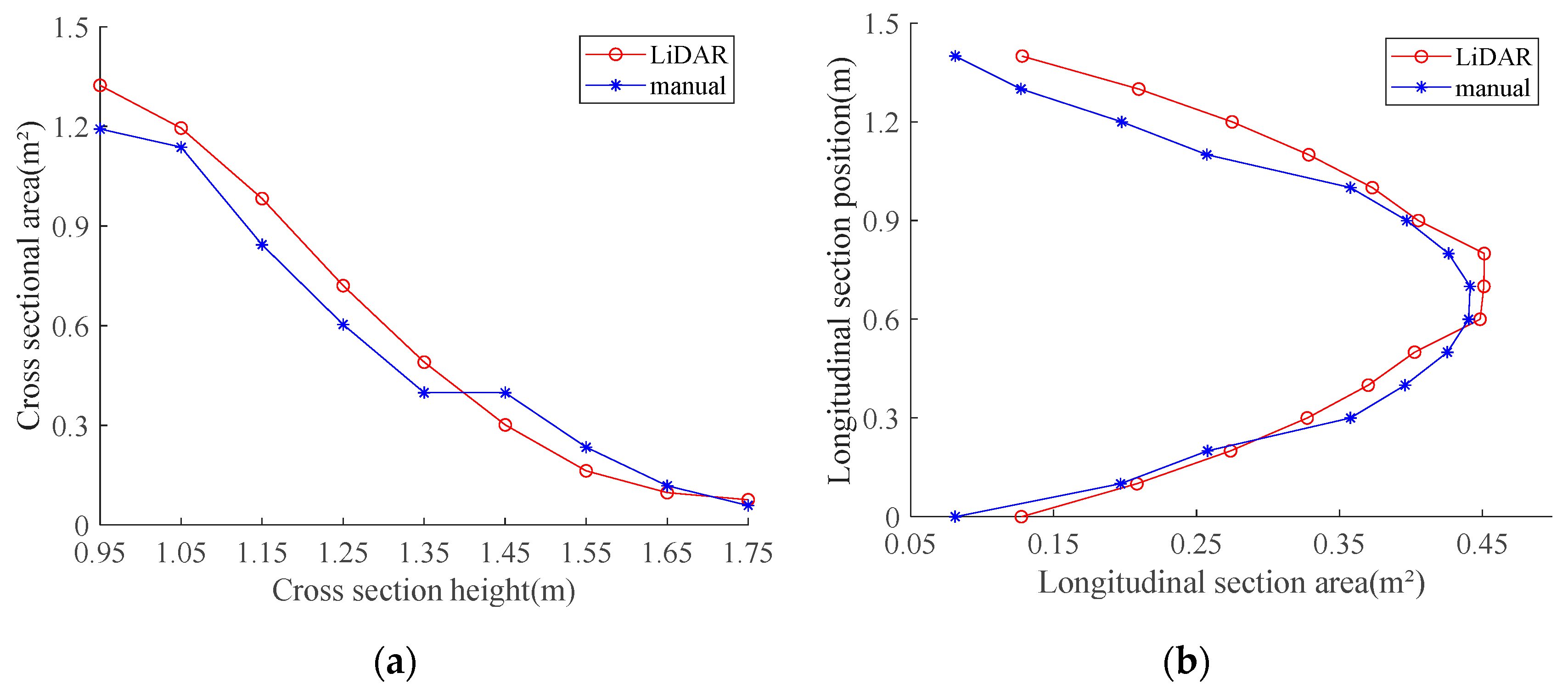
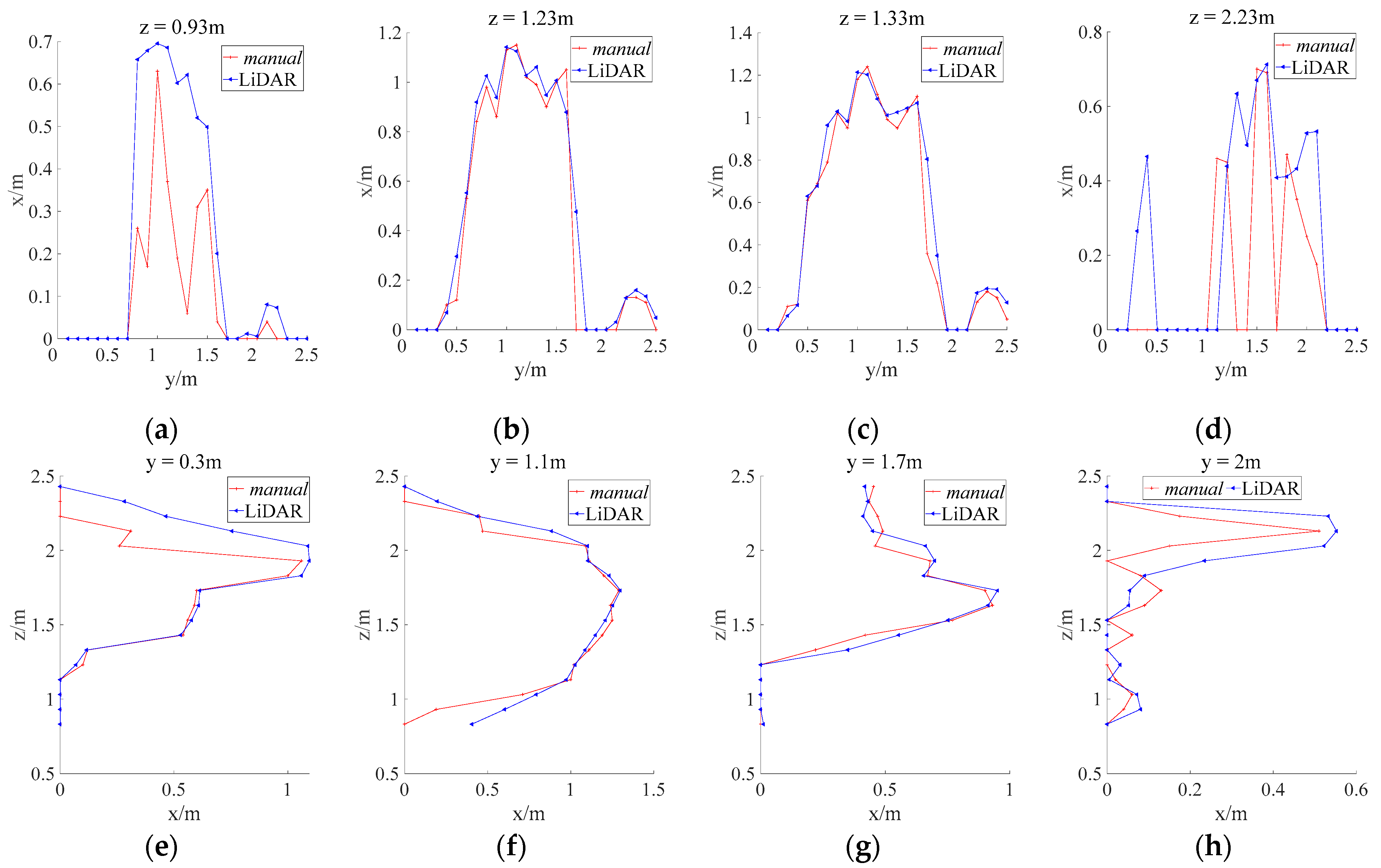
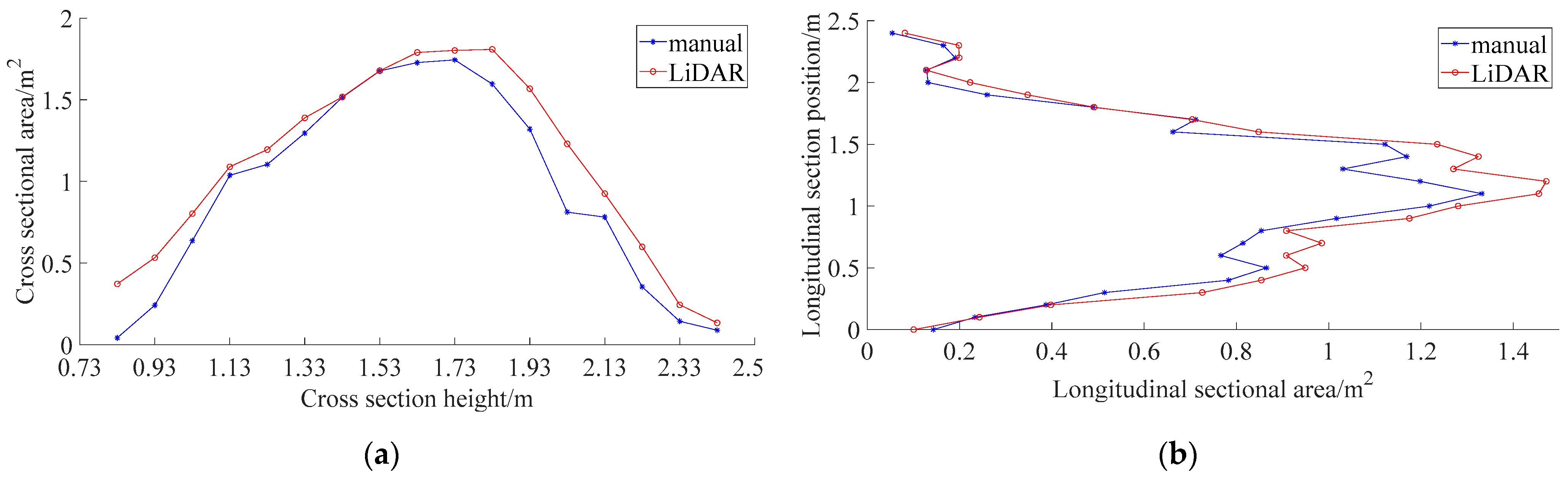
3.3.4. Comparison of CMPC Method and Manual Measurement Results
- Comparison between LiDAR and manually measured longitudinal and horizontal (cross-section) canopy profiles;
- 2.
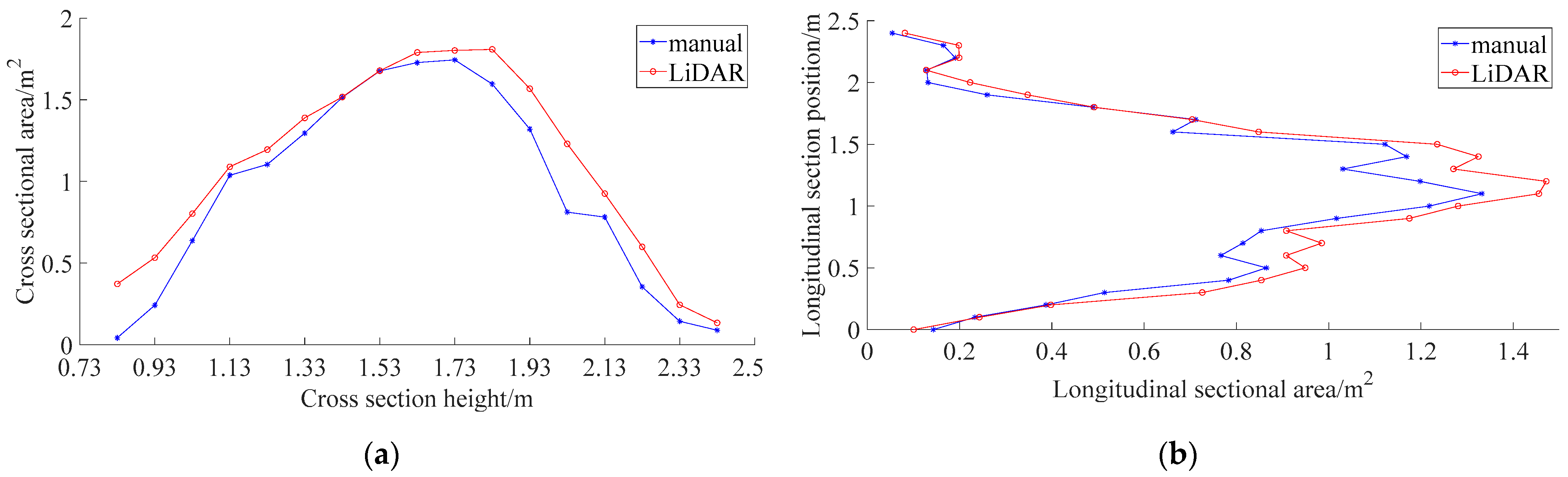
- Comparison between LiDAR and manually measured areas and volumes for different cross-sections of the canopy.
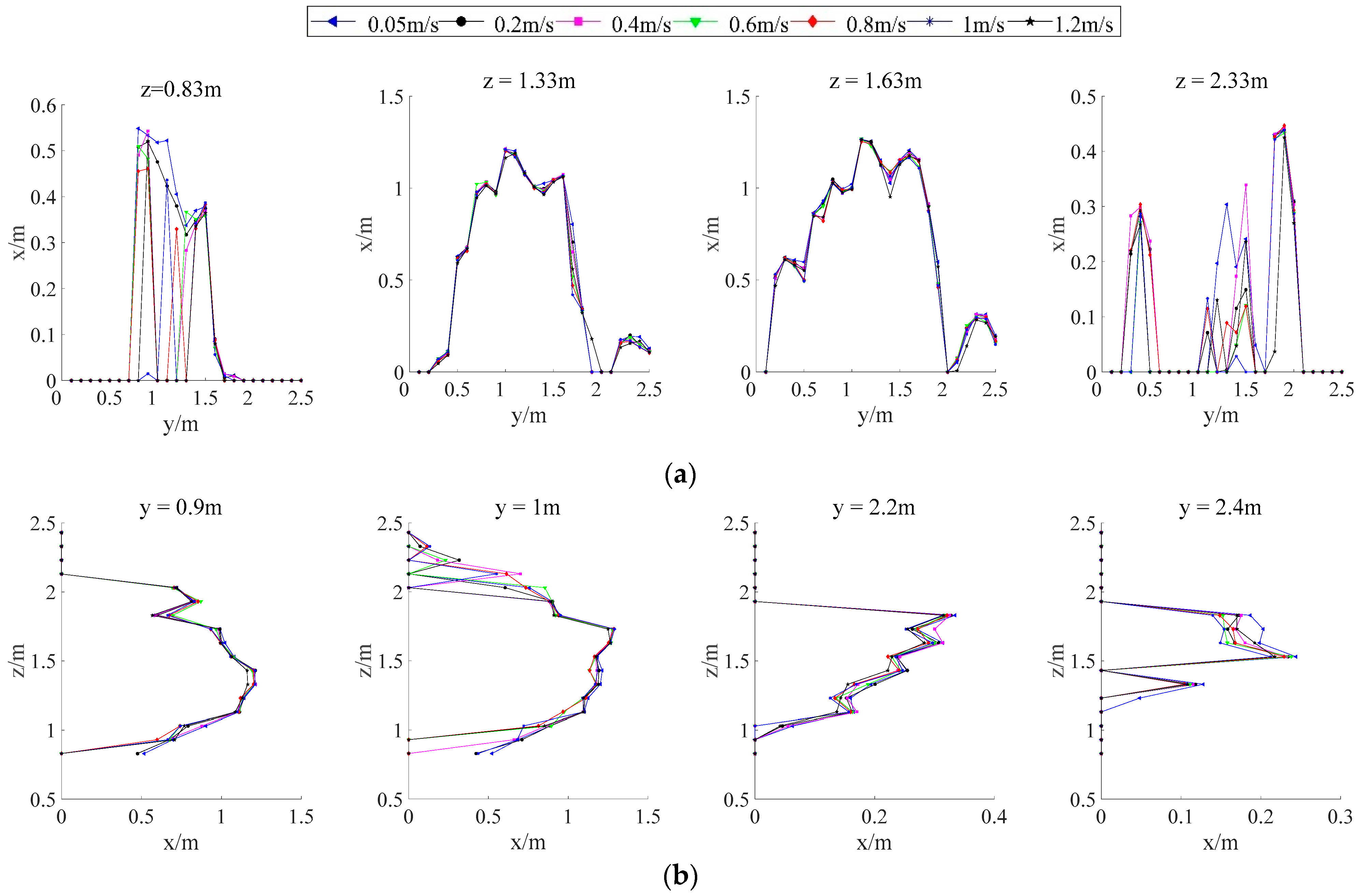
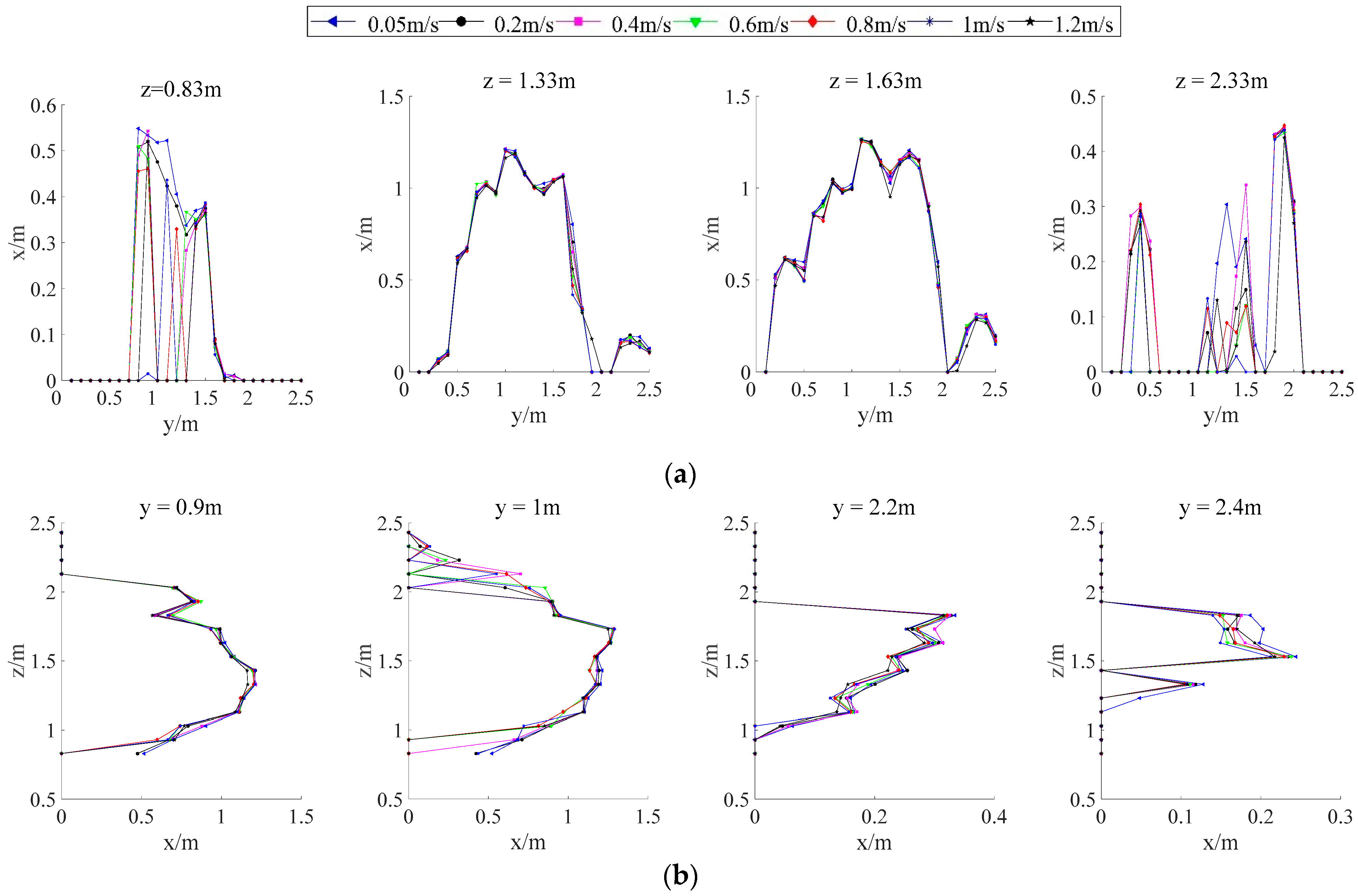
3.3.5. Analyzing Effects of Moving Speed on Canopy Profile Characterization
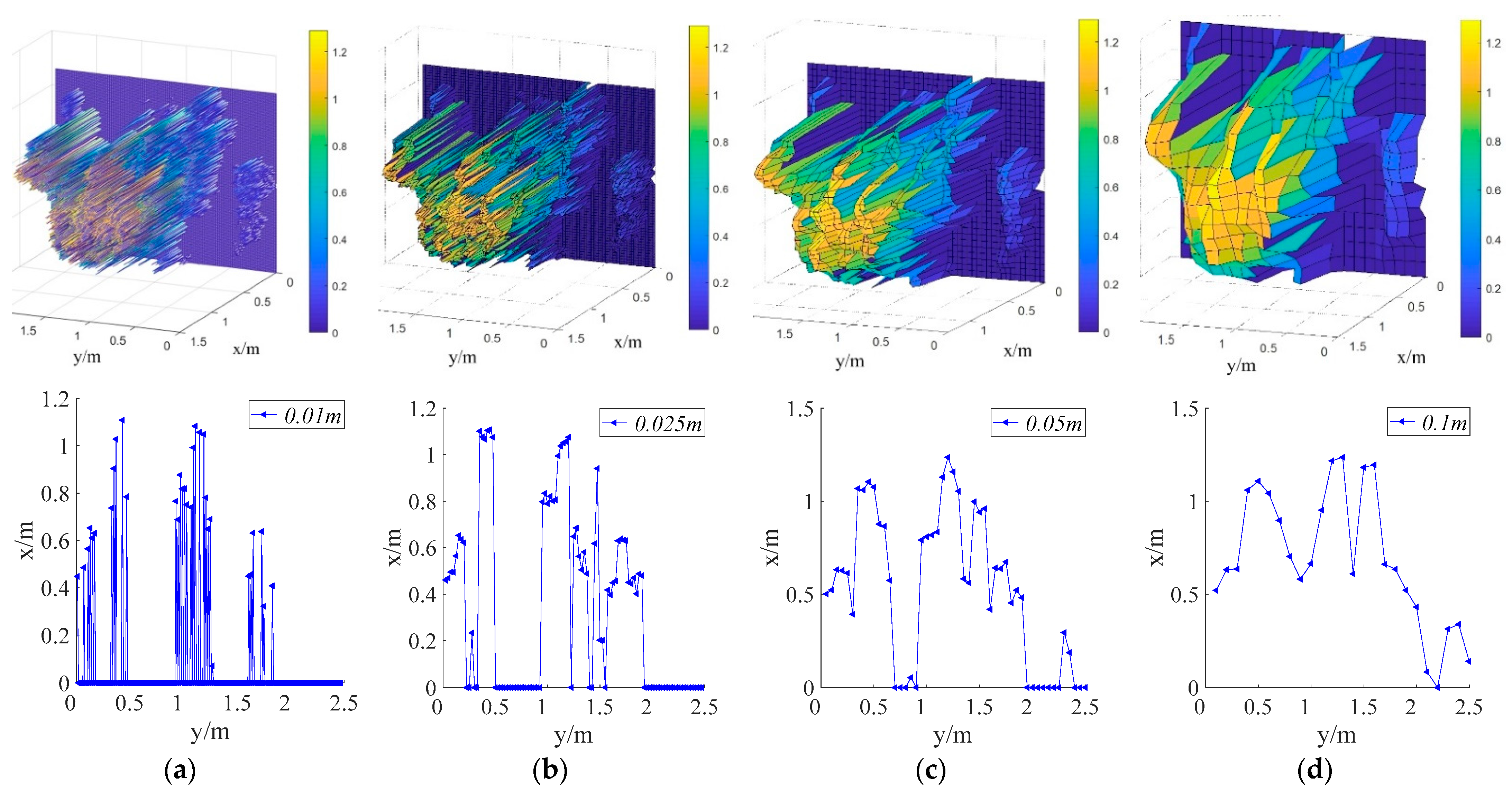
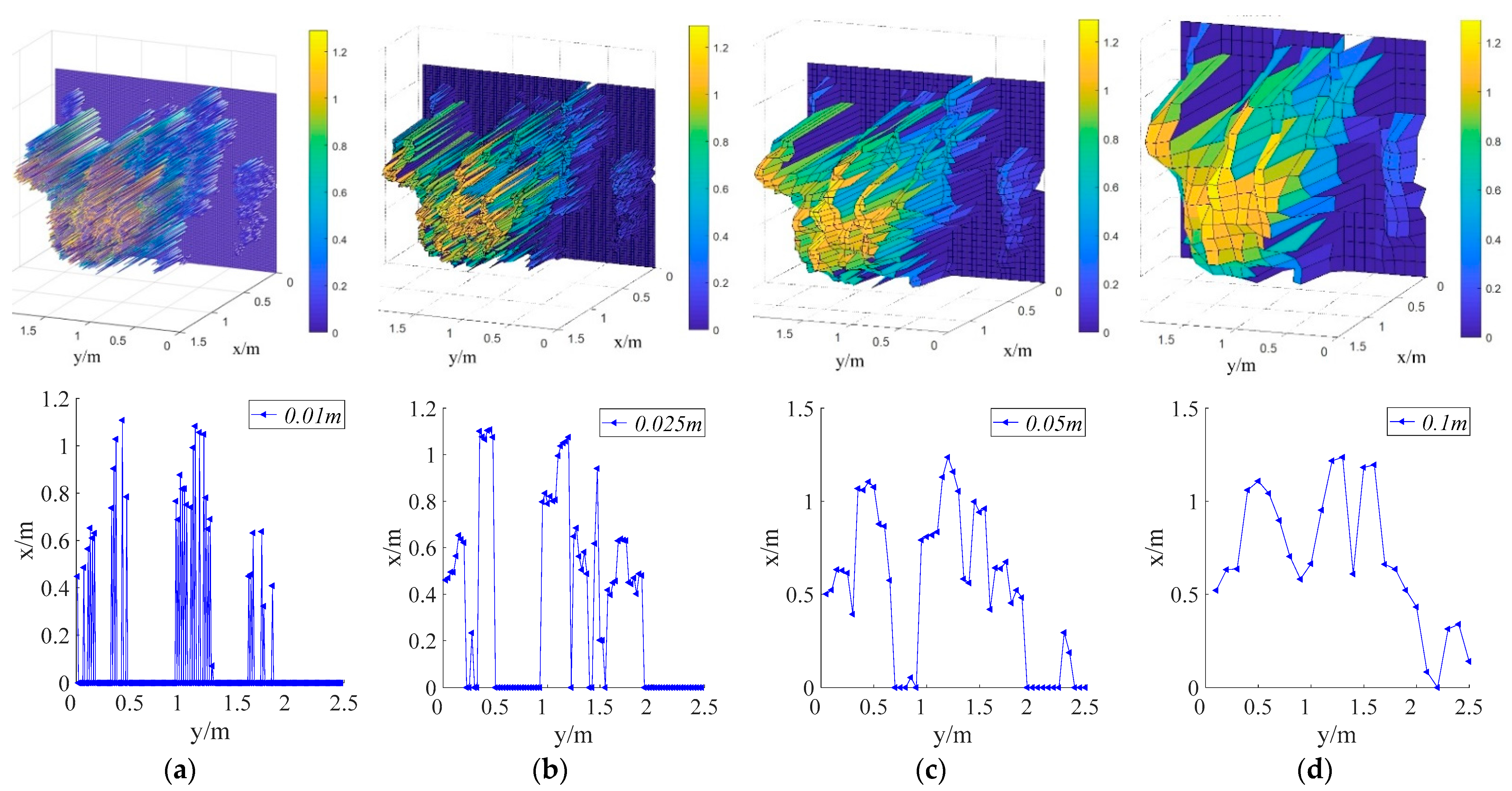
3.3.6. Effects of Grid Size on Canopy Profile Characterization
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Colaço, A.F.; Molin, J.P.; Rosell-Polo, J.R.; Escolà, A. Application of light detection and ranging and ultrasonic sensors to high-throughput phenotyping and precision horticulture: Current status and challenges. Hortic. Res. 2018, 5, 35. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, L.F.; Xue, X.Y.; Zhou, L.X.; Zhang, L.; Ding, S.M.; Chang, C.; Zhang, X.J.; Chen, C. Research situation and progress analysis on orchard variable rate spraying technology. Trans. CSAE 2017, 33, 80–92. [Google Scholar]
- Yu, L.; Huang, J.; Zhao, Z.X.; Zhang, L.; Sun, D.Z. Laser measurement and experiment of hilly orchard tree canopy volume. Trans. CSAM 2013, 44, 224–228. [Google Scholar]
- FAO. Minimum Requirements for Agricultural Pesticide Application Equipment; Food and Agriculture Organization of the United Nations: Rome, Italy, 2001. [Google Scholar]
- Li, L.L.; He, X.K.; Song, J.L.; Liu, Y.J.; Zeng, A.J.; Liu, Y.; Liu, C.H.; Liu, Z.X. Design and experiment of variable rate orchard sprayer based on laser scanning sensor. Int. J. Agric. Biol. Eng. 2018, 11, 101–108. [Google Scholar] [CrossRef] [Green Version]
- Cai, J.C.; Wang, X.; Song, J.; Wang, S.L.; Yang, S.; Zhao, C.J. Development of real-time laser-scanning system to detect tree canopy characteristics for variable-rate pesticide application. Int. J. Agric. Biol. Eng. 2017, 10, 155–163. [Google Scholar]
- Hu, K.Q.; Feng, X. Research on the Variable Rate Spraying System Based on Canopy Volume Measurement. J. Inf. Process. Syst. 2019, 15, 1131–1140. [Google Scholar]
- Deng, W.; He, X.K.; Zhang, L.D.; Zeng, A.J.; Song, J.L.; Zou, J.J. Target infrared detection in target spray. Spectrosc. Spect. Anal. 2008, 10, 2285–2289. [Google Scholar]
- Moltó, E.; Martin, B.; Gutiérrez, A. PM—Power and Machinery: Design and Testing of an Automatic Machine for Spraying at a Constant Distance from the Tree Canopy. J. Agric. Eng. Res. 2000, 77, 379–384. [Google Scholar] [CrossRef]
- Tian, L.; Slaughter, D.C. Environmentally adaptive segmentation algorithm for outdoor image segmentation. Comput. Electron. Agric. 1998, 21, 153–168. [Google Scholar] [CrossRef]
- Gao, G.D.; Xiao, K.; Ma, Y.J. A leaf-wall-to-spray-device distance and leaf-wall-density-based automatic route-planning spray algorithm for vineyards. Crop Prot. 2018, 111, 33–41. [Google Scholar] [CrossRef]
- Gené-Mola, J.; Gregorio, E.; Cheein, F.A.; Guevara, J.; Llorens, J.; Sanz-Cortiella, R.; Escolà, A.; Rosell-Polo, J.R. Fruit detection, yield prediction and canopy geometric characterization using LiDAR with forced air flow. Comput. Electron. Agric. 2020, 168, 7. [Google Scholar] [CrossRef]
- Gil, E.; Rosell, J.R.; Planas, S.; Val, L. Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Prot. 2007, 26, 1287–1297. [Google Scholar] [CrossRef] [Green Version]
- Maghsoudi, H.; Minaei, S.; Ghobadian, B. Ultrasonic sensing of pistachio canopy for low-volume precision spraying. Comput. Electron. Agric. 2015, 112, 149–160. [Google Scholar] [CrossRef]
- Li, Q.J.; Zheng, J.Q.; Zhou, H.P.; Zhang, H.; Song, Y.P.; Xu, B. Online Measurement of Tree Canopy Volume Using Vehicle-borne 2-D Laser Scanning. Trans. CSAM 2013, 47, 309–314. [Google Scholar]
- Tumbo, S.D.; Salyani, M.; Whitney, J.D.; Wheaton, T.A.; Miller, W.M. Investigation of laser and ultrasonic ranging sensors for measurements of citrus canopy volume. Appl. Eng. Agric. 2002, 18, 367–372. [Google Scholar] [CrossRef]
- Cai, J.R.; Sun, H.B.; Li, Y.P.; Sun, L.; Lu, H.Z. Orchard tree 3-D Information Perception and Reconstruction Based on Binocular Stereo Vision. Trans. CSAM 2002, 43, 152–156. [Google Scholar]
- Zhai, C.Y.; Zhao, C.J.; Wang, X.; Zou, W.; Mao, Y.J.; Zhang, R. Probing method of tree spray target profile. Trans. CSAE 2010, 26, 173–177. [Google Scholar]
- Palleja, T.; Landers, A.J. Real time canopy density validation using ultrasonic envelope signals and point quadrat analysis. Comput. Electron. Agric. 2017, 134, 43–50. [Google Scholar] [CrossRef]
- Li, H.Z.; Zhai, C.Y.; Weckler, P.; Wang, N.; Yang, S.; Zhang, B. A Canopy Density Model for Planar Orchard Target Detection Based on Ultrasonic Sensors. Sensors 2017, 17, 31. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhai, C.Y.; Wang, X.; Zhao, C.J.; Zou, W.; Liu, D.Y.; Mao, Y.J. Orchard tree structure digital test system and its application. Math. Comput. Model. 2011, 54, 1145–1150. [Google Scholar] [CrossRef]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Variable rate dosing in precision viticulture: Use of electronic devices to improve application efficiency. Crop Prot. 2010, 29, 239–248. [Google Scholar] [CrossRef] [Green Version]
- Schumann, A.W.; Zaman, Q.U. Software development for real-time ultrasonic mapping of tree canopy size. Comput. Electron. Agric. 2005, 47, 25–40. [Google Scholar] [CrossRef]
- Escolà, A.; Planas, S.; Rosell, J.R.; Jesús, P.; Ferran, C.; Francesc, S.; Felip, G.; Jordi, L.; Emilio, G. Performance of an ultrasonic ranging sensor in apple tree canopies. Sensors 2011, 11, 2459–2477. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhai, C.Y.; Wang, X.; Guo, J.J.; Xu, S.; Ma, W. Influence of Velocity on Ultrasonic Probing of Orchard Tree Profile. Sens. Lett. 2013, 11, 1062–1068. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A review of methods and application of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Zhu, H.; Ozkan, H.E. Development of variable-rate sprayer with laser scanning sensor to synchronize spray outputs to tree structures. Trans. ASABE 2012, 55, 773–781. [Google Scholar] [CrossRef] [Green Version]
- Colaço, A.F.; Trevisan, R.G.; Molin, J.P.; Rosell-Polo, J.R.; Escola, A. A Method to Obtain Orange Crop Geometry Information Using a Mobile Terrestrial Laser Scanner and 3D Modeling. Remote Sens. 2017, 9, 763. [Google Scholar] [CrossRef] [Green Version]
- Yan, T.T.; Zhu, H.P.; Sun, L.; Wang, X.C.; Ling, P. Detection of 3-D objects with a 2-D laser scanning sensor for greenhouse spray applications. Comput. Electron. Agric. 2018, 152, 363–374. [Google Scholar] [CrossRef]
- Llorens, J.; Gil, E.; Llop, J.; Escola, A. Ultrasonic and LIDAR Sensors for Electronic Canopy Characterization in Vineyards: Advances to Improve Pesticide Application Methods. Sensors 2011, 11, 2177–2194. [Google Scholar] [CrossRef] [Green Version]
- Qiu, B.J.; Yan, R.; Ma, J.; Guan, X.P.; Ou, M.X. Research Progress Analysis of Variable Rate Sprayer Technology. Trans. CSAM 2015, 46, 59–72. [Google Scholar]
- Sanz-Cortiella, R.; Llorens-Calveras, J.; Escola, A.; Arno-Satorra, J.; Ribes-Dasi, M.; Masip-Vilalta, J.; Camp, F.; Gracia-Aguila, F.; Solanelles-Batlle, F.; Planas-DeMarti, S.; et al. Innovative LIDAR 3D Dynamic Measurement System to Estimate Fruit-Tree Leaf Area. Sensors 2011, 11, 5769–5791. [Google Scholar] [CrossRef] [PubMed]
- Gil, E.; Arno, J.; Llorens, J.; Sanz, R.; Llop, J.; Rosell-Polo, J.R.; Gallart, M.; Escola, A. Advanced Technologies for the Improvement of Spray Application Techniques in Spanish Viticulture: An Overview. Sensors 2014, 14, 691–708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, K.H.; Ehsani, R. A Laser sanner based measuremen systerm for quantification of citrus tree geometric characteristics. Appl. Eng. Agric. 2009, 25, 777–788. [Google Scholar] [CrossRef]
- Chen, Y.; Ozkan, H.E.; Zhu, H.; Derksen, R.C.; Krause, C.R. Spray deposition inside tree canopies from a newly developed variable-rate air-assisted sprayer. Trans. ASABE 2013, 56, 1263–1272. [Google Scholar]
- Cai, J.C. Research on Tree On-line Detection Method and Targeted Variable-Rate Spraying Techniques Based on Laser-Scanning Sensor. Ph.D. Thesis, China Agricultural University, Beijing, China, 2018. [Google Scholar]
- Zhai, C.Y.; Zhao, C.J.; Ning, W.; John, L.; Wang, X.; Paul, W.; Zhang, H.H. Research progress on precision control methods of air-assisted spraying in orchards. Trans. CSAE 2018, 34, 1–15. [Google Scholar]
- Del-Moral-Martinez, I.; Rosell-Polo, J.R.; Company, J.; Sanz, R.; Escola, A.; Masip, J.; Martinez-Casasnovas, J.A.; Arno, J. Mapping Vineyard Leaf Area Using Mobile Terrestrial Laser Scanners: Should Rows be Scanned On-the-Go or Discontinuously Sampled? Sensors 2016, 16, 119. [Google Scholar] [CrossRef] [Green Version]
- Cruz Ulloa, C.; Krus, A.; Barrientos, A.; Del Cerro, J.; Valero, C. Robotic Fertilisation Using Localisation Systems Based on Point Clouds in Strip-Cropping Fields. Agronomy 2020, 11, 11. [Google Scholar] [CrossRef]
- Van der Zande, D.; Hoet, W.; Jonckheere, I.; Van Aardt, J.; Coppin, P. Influence of measurement set-up of ground-based LiDAR for derivation of tree structure. Agric. For. Meteorol. 2006, 141, 147–160. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, H. Evaluation of a laser scanning sensor in direction of complex-shaped targets for variable-rate sprayer development. Trans. ASABE 2016, 59, 1181–1192. [Google Scholar]
- Shen, D.A.Y.; Liu, H.; Hussain, F. A Lidar-Based Tree Canopy Detection System Development. In Proceedings of the 37th Chinese Control Conference, Wuhan, China, 25–27 July 2018; pp. 10361–10366. [Google Scholar]
- Béland, M.; Widlowski, J.L.; Fournier, R.A. A model for deriving voxel-level tree leaf area density estimates from ground-based LiDAR. Environ. Modell. Softw. 2014, 51, 184–189. [Google Scholar] [CrossRef]
- Fernández-Sarría, A.; Martínez, L.; Velázquez-Martí, B.; Sajdak, M.; Estornell, J.; Recio, J.A. Different methodologies for calculating crown volumes of Platanus hispanica trees using terrestrial laser scanner and a comparison with classical dendrometric measurements. Comput. Electron. Agric. 2013, 90, 176–185. [Google Scholar] [CrossRef]
- Seidel, D.; Fleck, S.; Leuschner, C. Analyzing Forest canopies with ground-based laser scanning: A comparison with hemispherical photography. Agric. For. Meteorol. 2012, 154, 1–8. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Moving Speed (M/S) | Distance Traveled (M) | Measurement Error (M) | Relative Error (%) |
|---|---|---|---|
| 0.05 | 4.988 | 0.012 | 0.24 |
| 0.3 | 4.992 | 0.008 | 0.16 |
| 0.6 | 5.028 | 0.028 | 0.56 |
| 0.9 | 5.112 | 0.112 | 2.24 |
| 1.2 | 5.208 | 0.208 | 4.16 |
| Moving Speed (M/S) | Distance Traveled (M) | Measurement Error (M) | Relative Error (%) |
|---|---|---|---|
| 0.05 | 4.007 | 0.007 | 0.175 |
| 0.2 | 3.996 | 0.004 | 0.1 |
| 0.4 | 3.992 | 0.008 | 0.2 |
| 0.6 | 3.972 | 0.028 | 0.7 |
| 0.8 | 3.984 | 0.016 | 0.4 |
| 1.0 | 4 | 0 | 0 |
| 1.2 | 4.008 | 0.008 | 0.2 |
| Section | Position (M) | Manually Measured Area (M2) | Lidar Measured Area (M2) | Relative Error (%) |
|---|---|---|---|---|
| Horizontal cross-section | 0.93 | 0.242 | 0.533 | 120 |
| 1.23 | 1.104 | 1.194 | 8.2 | |
| 1.33 | 1.296 | 1.389 | 7.2 | |
| 2.23 | 0.355 | 0.599 | 69 | |
| Longitudinal cross-section | 0.3 | 0.514 | 0.726 | 41 |
| 1.1 | 1.332 | 1.455 | 9.2 | |
| 1.7 | 0.712 | 0.704 | 1.1 | |
| 2 | 0.132 | 0.223 | 69 |
| Moving Speed (M/S) | Canopy Volume (M3) | Relative Error with Respect to Manual Measurement (%) | Relative Error with Respect to Lidar Measurement Taken at 0.05 M/S (%) | |
|---|---|---|---|---|
| Manual measurement | 1.61 | 0 | 12.5 | |
| LiDAR measurement | 0.05 | 1.84 | 14 | 0 |
| 0.2 | 1.80 | 12 | 2.2 | |
| 0.4 | 1.76 | 9.3 | 4.3 | |
| 0.6 | 1.72 | 6.8 | 6.5 | |
| 0.8 | 1.70 | 5.6 | 7.6 | |
| 1.0 | 1.68 | 4.3 | 8.7 | |
| 1.2 | 1.67 | 3.7 | 9.2 | |
| Measurement Method | Grid Size (M × M) | Volume (M3) | Canopy Width (M) | Canopy Height (M) |
|---|---|---|---|---|
| Manual | 0.1 × 0.1 | 1.61 | 2.46 | 1.7 |
| LiDAR measured speed 1 m/s | 0.01 × 0.01 | 0.32 | 2.46 | 1.65 |
| 0.025 × 0.025 | 1.02 | 2.46 | 1.65 | |
| 0.05 × 0.05 | 1.37 | 2.46 | 1.65 | |
| 0.075 × 0.075 | 1.55 | 2.46 | 1.65 | |
| 0.1 × 0.1 | 1.68 | 2.46 | 1.65 |
Publisher′s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, C.; Zhai, C.; Wang, X.; Wang, S. CMPC: An Innovative Lidar-Based Method to Estimate Tree Canopy Meshing-Profile Volumes for Orchard Target-Oriented Spray. Sensors 2021, 21, 4252. https://doi.org/10.3390/s21124252
Gu C, Zhai C, Wang X, Wang S. CMPC: An Innovative Lidar-Based Method to Estimate Tree Canopy Meshing-Profile Volumes for Orchard Target-Oriented Spray. Sensors. 2021; 21(12):4252. https://doi.org/10.3390/s21124252
Chicago/Turabian StyleGu, Chenchen, Changyuan Zhai, Xiu Wang, and Songlin Wang. 2021. "CMPC: An Innovative Lidar-Based Method to Estimate Tree Canopy Meshing-Profile Volumes for Orchard Target-Oriented Spray" Sensors 21, no. 12: 4252. https://doi.org/10.3390/s21124252
APA StyleGu, C., Zhai, C., Wang, X., & Wang, S. (2021). CMPC: An Innovative Lidar-Based Method to Estimate Tree Canopy Meshing-Profile Volumes for Orchard Target-Oriented Spray. Sensors, 21(12), 4252. https://doi.org/10.3390/s21124252