1. Introduction
Path planning is one of the most important problems in autonomous robot navigation, and it has been discussed in the scientific community since the 1980s [
1,
2,
3]. The issue of planning is particularly relevant because it is almost a requirement for an autonomous mobile robot to perform a motion from an initial to a goal position while avoiding possible collisions in an environment with obstacles and narrow passages [
4].
Initially, researches were focused on the development of path planners based on Roadmaps [
5], Cell Decomposition [
6], and Potential Field [
7]. Due to the so-called curse of dimensionality due to high-dimensional configuration spaces, the researchers were motivated to develop sampling-based approaches for path planning, which usually use few computer resources and have been widely used for this sort of problem [
8,
9,
10,
11,
12]. The most important sampling-based (probabilistic) path planning methods are Rapidly-Exploring Random Tree (RRT) [
13,
14] and Probabilistic Roadmaps (PRM) [
15]. Further, Karaman and Frazzoli [
12] have proposed the methods RRT* and PRM*, two of the most successful variants of RRT and PRM, respectively.
Most of the path planning methods are mainly dedicated to generate optimal paths or find feasible paths with reduced execution time [
16]. Nevertheless, it is also essential to ensure safety for a robot when moving in unstructured environments [
17]. Thus, planning paths sufficiently far from the obstacles is vital for most applications [
18].
There are path planners that primarily intend to generate paths with high clearance from obstacles. The path planning methods based on the Voronoi diagram [
3,
19,
20] are approaches that guarantee clearance along the paths. However, they are not practical for problems involving many degrees of freedom (DOFs) and many obstacles [
21], due to the explicit computation of the configuration space obstacles.
Paliwal and Kala [
22] presented a goal-oriented path planning algorithm that provides high clearance from obstacles by propagating circles in the free configuration space. Nevertheless, this method is limited to maps where the clearance is at least twice the robot, i.e., environments with large passageways. In [
23], an improved A* algorithm is proposed to plan paths as far away as possible from the obstacles. In this approach, the environment needs to be subjected to improved modeling using a danger coefficient based on the distance between the robot and the obstacles. However, this approach may be challenging for high-dimensional spaces.
On the other hand, several strategies that intend to increase the clearance from obstacles along a given path are already planned, such as [
21,
24,
25,
26]. In [
27], the free configuration space exploration is guided by a heuristic function based on a safety measure called Danger Field. In [
28], Quinlan and Khatib proposed a framework to deal with collision-free motion using structures called Elastic Strips that can deform a path known
a priori. However, safety was not addressed explicitly.
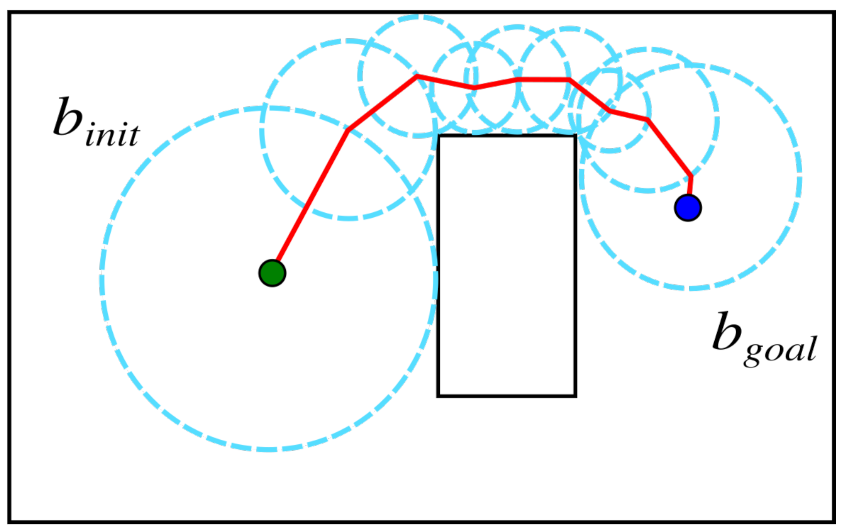
A sampling-based path planner called the Probabilistic Foam Method (PFM) was proposed in [
29] with the main feature of ensuring an obstacle-free region for safe maneuverability. The safe region is provided by a structure called bubble, which has an
n-ball shape, and represents a subset of the free space. A set of bubbles propagate through the free space from the initial configuration towards the goal configuration in a tree structure called probabilistic foam. The resulting path for this approach is extracted from a sequence of overlapped bubbles, called the rosary, which bounds the path and guarantees safe motions, also providing safety constraints for adjustments, such as path smoothing [
30]. The rosary is illustrated in
Figure 1.
In [
31,
32], we used the PFM to compute a set of safe configurations for a lower limb active orthosis to transpose a simple obstacle. The main contribution of [
31] was the modeling of new bubbles inspired by the concept of
Bubble of free space, proposed in [
33], which enabled PFM to solve robotic problems with many degrees of freedom. In [
34], we presented a variant of PFM called Goal-Biased Probabilistic Foam (GBPF). In this variant, we proposed a new foam propagation approach inspired by goal-biased RRT tree growing, which returns paths with the convenient trade-off between finding short paths through narrow passages in the map and keeping the clearance from obstacles. Additionally, GBPF is fast and usually computes a few bubbles.
Beyond the already known algorithms PFM and GBPF, in this paper, we present two new variants of Probabilistic Foam: Radius-biased Probabilistic Foam (RBPF) and Heuristic-Guided Probabilistic Foam (HPF). The variant RBPF is capable of finding paths with high-clearance areas in the map, and HPF converges fast towards to the goal configuration, generating short paths. For the probabilistic foam-based planners, where the rosary bounds the path, it is necessary some metrics to measure the clearance from the obstacles considering the influence of the bubbles. Thus, we also propose in this work some metrics to evaluate the four algorithms.
The remainder of the paper is organized as follows:
Section 2 describes the original PFM, and a new approach to determine one of its parameters is proposed. In
Section 3, we present the GBPF algorithm [
34] and propose two new variants of PFM—RBPF and HPF.
Section 5 presents simulation results and discussions. Finally, we present some conclusions and future works in
Section 6.
2. The Probabilistic Foam Method
Probabilistic Foam Method (PFM) is a sampling-based path planning algorithm, initially proposed in [
29]. This method ensures a volumetric region for safe maneuverability, ideal for robotic applications that need safety when performing movements.
Let
C be a
n-dimensional space with all possible robot configurations
q and let
Cf and
Co be subsets of
C, where
Cf is the obstacle-free region and
Co is the obstacle region in
C (
C =
Cf ∪
Co). A bubble
b is a volumetric region computed in
Cf, which provides safe regions. The region
b is a
n−ball and its surface is a (
n − 1)-sphere in the free configuration space C
f; it can be defined as
where
r is the radius of the bubble,
qc is its the center, and
d(
q,
qc) is the metric adopted in the configuration space. In other words, a bubble expands from its center
qc to the nearest C-obstacle
Co or it can be computed using metrics in the workspace [
31].
In this method, the free-space is covered by a set of overlapped bubbles from an initial configuration to a goal configuration in a tree structure called probabilistic foam. The probabilistic foam performs an approximated coverage, similar to some methods based on approximated convex cell decomposition. The foam propagation strategy is analogous to the mechanisms of a breadth-first search as well as wavefront propagation, commonly used in methods based on potential fields.
2.1. Foam Propagation
Propagation occurs by expanding child bubbles
on the free surface of parent bubbles
(bubbles from the previous generation). The propagation starts from the initial bubble
(i.e., the bubble centered at the initial configuration). Each parent bubble can expand a maximum of
N child bubbles, as shown in Equation (
2):
where
is the radius of the smallest allowed bubble and can be estimated by analyzing the width of the passages on the map. The parameter
n is the dimension of the configuration space and
r is the radius of the parent bubble. Finally,
K is a constant that indicates the maximum number of child bubbles allowed for the bubble with radius
. The process of foam propagation is illustrated in
Figure 2.
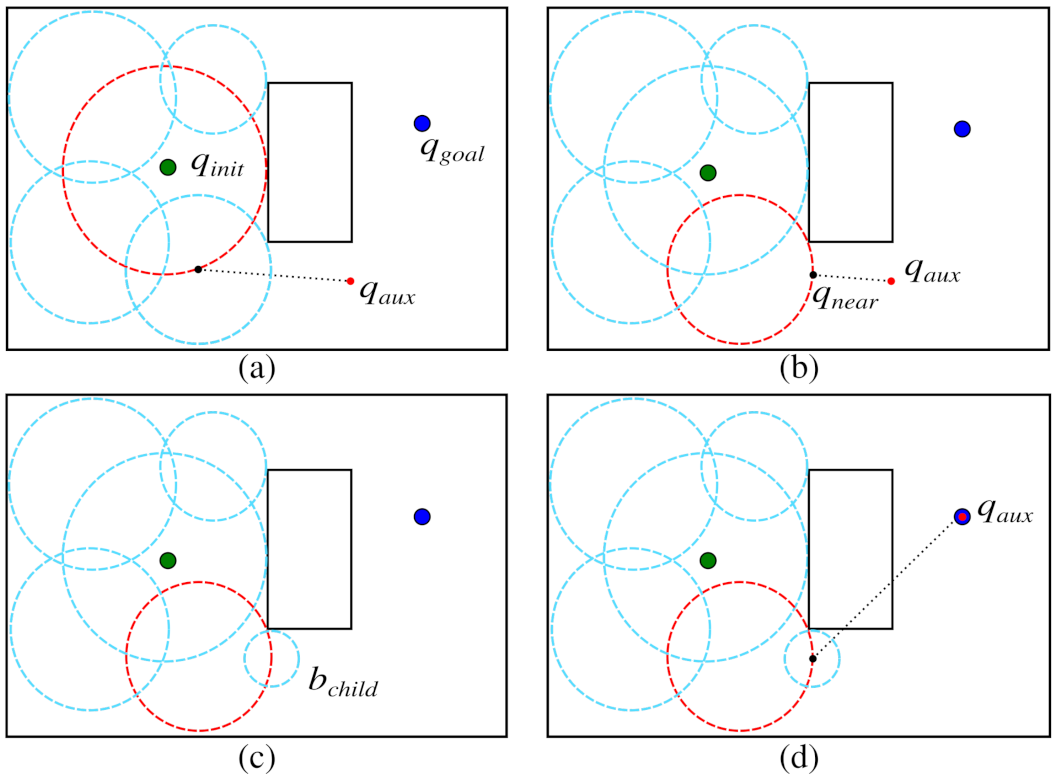
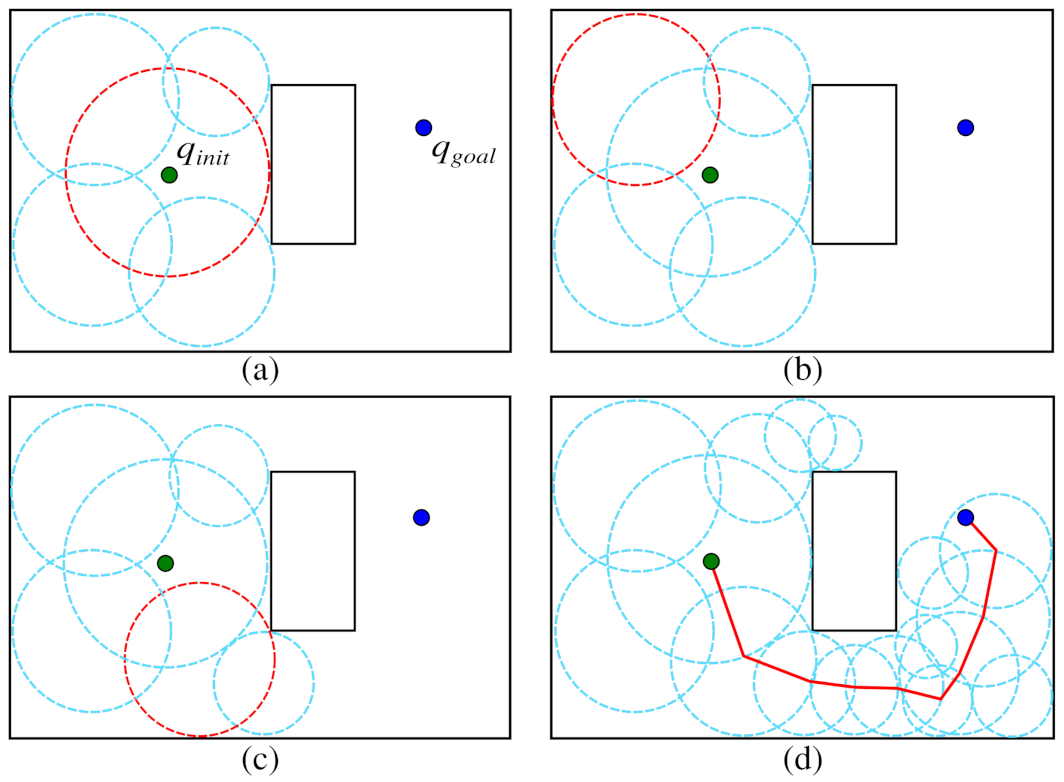
Child bubbles are expanded over the parent bubble surface during the foam propagation process. However, this expansion only occurs in regions that were not already covered by the foam (see
Figure 2a,b). For each generation, all previous child bubbles are selected as parent bubbles; then, new bubbles are expanded (
Figure 2c). When some bubble encircles the goal configuration,
, the propagation finishes (
Figure 2d). Finally, the rosary can be found by following the parental relation between the bubbles from
to
, and a collision-free path can be extracted by connecting the center of the bubbles, as shown in
Figure 1, solving the path planning problem.
In previous studies [
29,
31,
34], the constant
K was determined by empirical analysis. In this paper, we propose a new approach to determine the value of
K according to the dimension of the configuration space.
Setting the Constant K
The constant
K is an important parameter of Equation (
2), which indicates the maximum number of child bubbles necessary to cover the entire surface area of bubble with radius
.
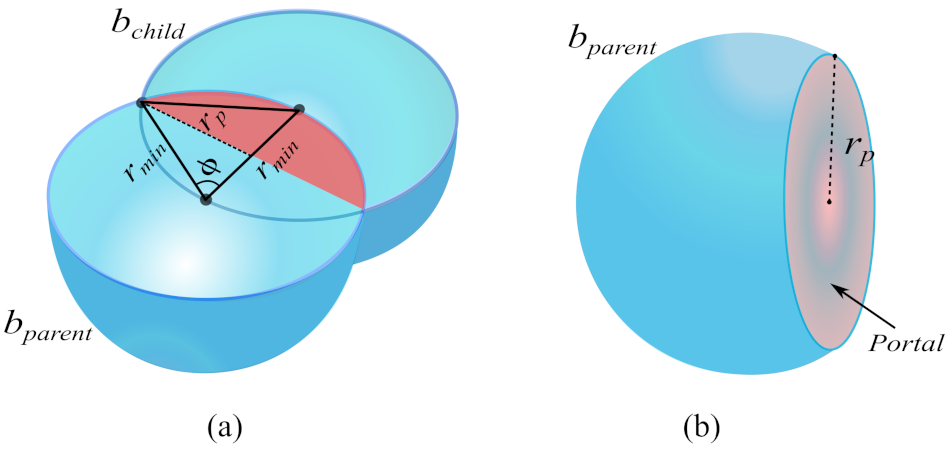
Considering the best-case scenario, where the bubbles
and
have an equal radius (
), the triangle formed between these bubbles (as shown in
Figure 3) is equilateral, with all three sides equal to
. Thus, the colatitude angle of the hyperspherical cap is
and the radius of the portal region is
.
It is possible to obtain
K as a function of the dimension of the configuration space
n. This value can be obtained by dividing the surface area
of a
-sphere (hypersphere represented by
in
Figure 3a) by the volume
of the portal, the region is resulted by removing the hyperspherical cap (red area), as can be seen in
Figure 3b.
The well-known surface area
of a
-sphere, with radius
can be expressed by
where
denotes the gamma function [
35]. Based on [
36], the volume
of a (
)-ball (portal region), with radius
, is defined as
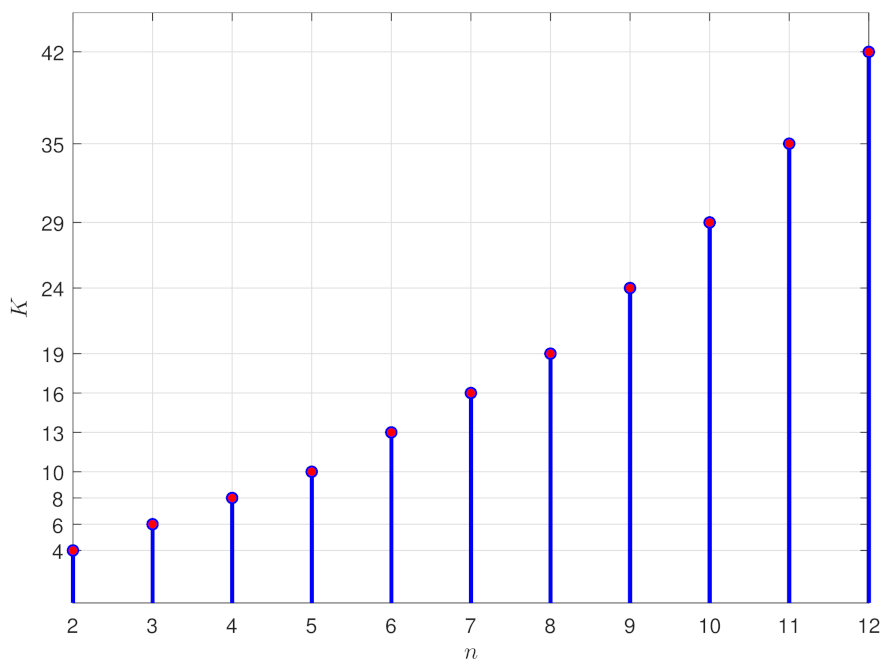
Thus, the value of
K, given dimension
n of the C-space, can be defined by
Using Equation (
5), it is possible to compute the number of bubbles necessary for a parent bubble with radius
.
Figure 4 shows the value of
K for the dimension
n of the C-space varying from 2 to 12.
2.2. Pseudocode of PFM
The procedure presented in Algorithm 1 describes the Probabilistic Foam Method. The algorithm receives as input the configurations and , the minimum radius , and the set of obstacles , and returns the rosary , from which it is possible to extract the path. The list F and the queue Q store all bubbles in the foam and the child bubbles for each generation, respectively. The list F represents the probabilistic foam itself, and the data structure Q has all candidate parent bubbles. When some bubble expands, it is removed from Q. The function at line 3 returns the radius of a new bubble. The function (line 4) stores a bubble (center and radius) in the list F.
For each generation, a parent bubble is selected from the queue Q (line 7); the maximum number of child bubbles N is computed (line 8); and using the function , a configuration is sampled on the parent bubble surface (line 10). If the configuration is not sampled in the interior of another bubble in the foam (verified using the function on (line 11), a new bubble is expanded (line 12). If the radius of the new bubble is greater than or equal to , this bubble is stored in lists F and Q. For each new bubble added to the foam, it is verified if the new bubble encircles the configuration (line 16). If it does, the rosary is extracted from the foam F using the function and the algorithm stops, returning success. Otherwise, the current bubble is removed from Q, and the next parent bubble will be selected.
The original Probabilistic Foam method described in this section does not present any mechanism that improves the foam propagation strategy to obtain safer and shorter paths or to decrease the processing time of the algorithm. In this way, in the next sections, we present some variants of the original PFM with different propagation approaches.
| Algorithm 1: Probabilistic Foam Method. |
 |
5. Results
This section presents some simulated experiments with the Probabilistic Foam Method and Goal-Biased Probabilistic Foam algorithms, and the two variants of the original PFM proposed in this work, Radius-Biased Probabilistic Foam and Heuristic-Guided Probabilistic Foam. The algorithms were applied to four maps with particular features to analyze the behavior of each method, such as convergence time, path length, number of generated bubbles, and path safety. The developed maps for this work were categorized as narrow, simple, complex, and 3D, as shown in
Table 1.
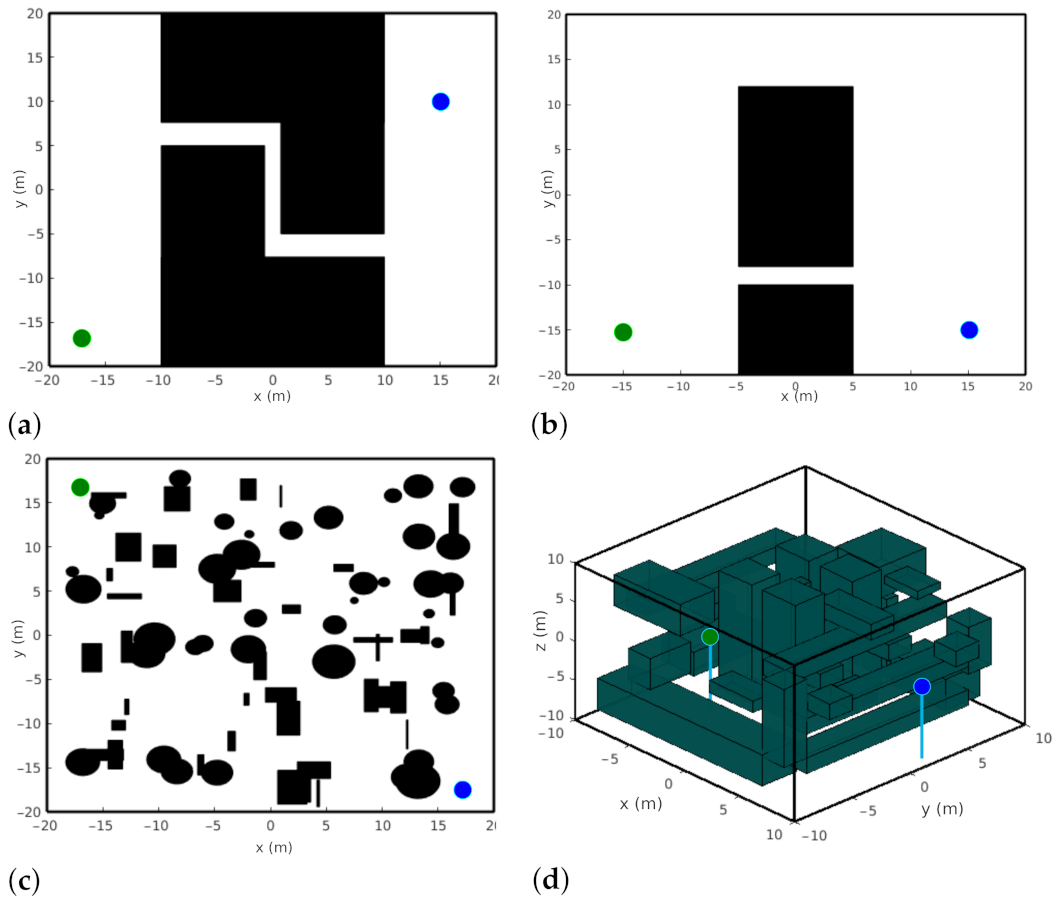
The four maps developed for the simulations are illustrated in
Figure 8.
Map 1 (Narrow), shown in
Figure 8a, was used to analyze the search time and the number of bubbles for each algorithm to pass through the narrow passage. Map 2 (Simple), shown in
Figure 8b, presents two possible routes: the first one is short with a narrow passage, and the second one is long with a wide passage. Map 3 (Complex), shown in
Figure 8c, represents a general outdoor environment, which usually has many possible routes for the robot to navigate toward its goal. This map is designed with rectangles and circle-shaped randomly distributed and sized objects. Finally, Map 4 (Complex 3D), shown in
Figure 8d, represents a complex outdoor environment with many obstacles and routes in a three-dimensional space. This 3D map was used to analyze the behavior of the methods when the dimension of the configuration space is increased.
These maps present the obstacle regions explicitly represented in C-space. This representation enables the computation of bubbles considering Equation (
1). In addition, these regions better illustrate the resulted probabilistic foam, rosaries, and paths. However, for practical experiments, this representation is computationally unfeasible. In this way, new bubbles can be easily computed using information from the workspace without needing the C-obstacle computation, as shown in [
30]. Besides, it also allows us to compute bubbles for different robots.
The simulations with the algorithms PFM, GBPF, RBPF, and HPF were performed on a 1.8 GHz Intel Core i7 processor with 8 GB RAM on the Ubuntu 16.04 operating system. The parameters of the algorithms were determined according to the map and were used for all algorithms. The parameter
was determined empirically where for Narrow map,
; for simple map,
; for Complex map,
; and for Complex 3D map,
. The parameter
was necessary only for the GBPF algorithm, and was determined as
(as suggested by [
14]) for all experiments. Finally, the
K parameter is determined by Equation (
5), according to the dimension of the configuration space. Thus, for the 2D case and 3D case, we use
and
, respectively.
Simulations were performed to demonstrate the probabilistic foam behavior and some features of the methods.
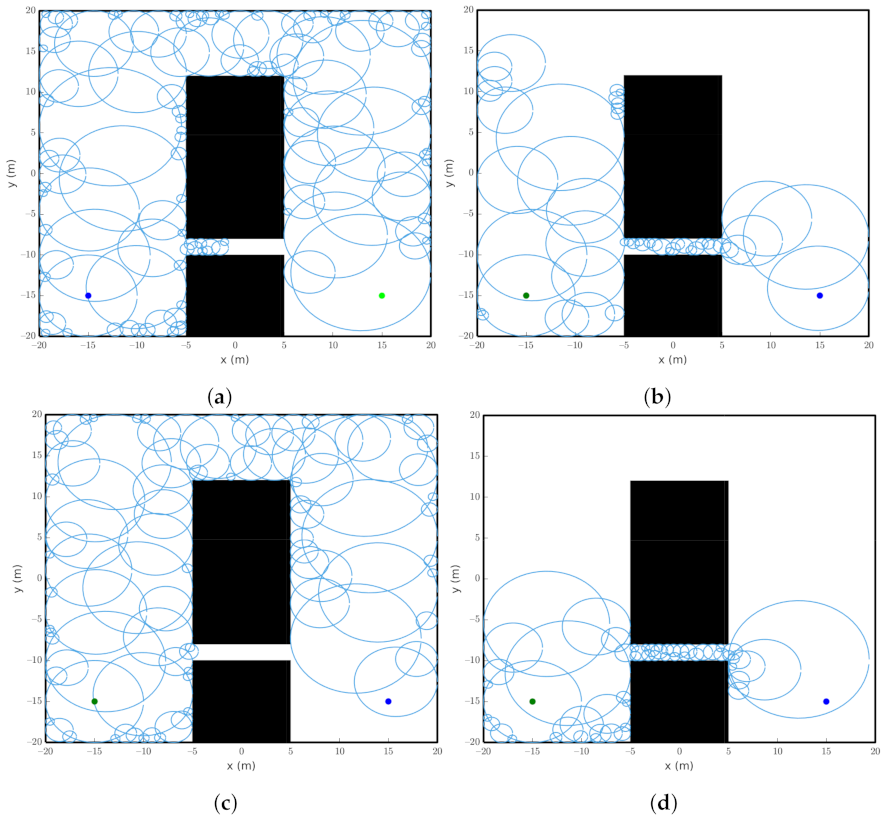
Figure 9 shows the generated probabilistic foam considering the four methods for one simulation using Map 2.
The probabilistic foam generated by PFM (
Figure 9a) is dense, i.e., it has a large number of expanded bubbles. Besides, the probabilistic foam generates large bubbles in large passages on the map, resulting in fast propagation in these areas. Thus, the probability of convergence by this route is greater and, consequently, the paths usually have more clearance. On the other hand, this method does not obtain the shortest path. The obtained paths by PFM are shown in
Figure 10.
The simulation with GBPF generated a probabilistic foam less dense than PFM, as can be seen in
Figure 9b. Our approach inspired in the Goal-biased RRT algorithm enabled the foam of GBPF to propagate fast towards the configuration
, and generate fewer bubbles. A disadvantage in this randomized approach is that the foam propagates in a disorganized way, generating many irregular bubbles. Additionally, the strategy to choose the parent bubble used in the GBPF makes some small bubbles expand very close to the obstacles. Therefore, some segments of the resulted path can be close to the obstacles even when there is free space available. This configuration can be observed in all paths generated by GBPF, as seen in
Figure 10.
Figure 9c shows the probabilistic foam generated by the RBPF algorithm. According to the main feature of this approach, bubbles with a larger radius have a higher probability to be chosen as parent bubbles. This characteristic facilitates fast propagation through passages with high clearance from the obstacles, which generates safer paths, as can be seen in
Figure 10. However, this approach must only be applied when the path must pass through the route with higher clearance on the map, since the bubbles will reach narrow areas only when the foam covers all large areas on the map. This implies that the convergence time can be harmed when the configuration
is placed on difficult access areas.
Finally,
Figure 9d shows the probabilistic foam generated by the HPF algorithm. The strategy of selecting a parent bubble based on costs allows the foam to propagate faster towards the configuration
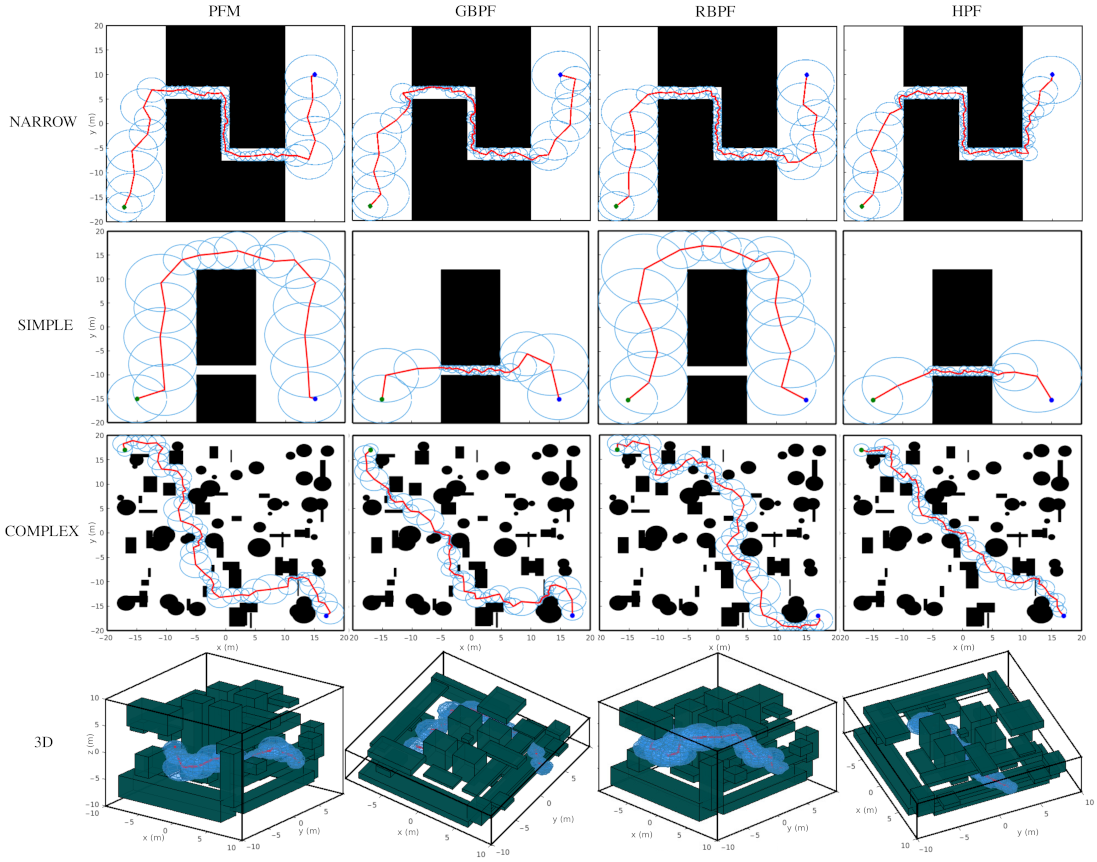
, generating few bubbles. An important feature illustrated in Map 2 (Simple) is that the foam propagation was faster through the narrow passages, resulting in a short path. The paths obtained by all methods for all maps are shown in
Figure 10.
Considering the stochastic characteristics of the algorithms, some simulations were performed for each algorithm to analyze the processing time (Time), the number of generated bubbles (Bubbles), and the path length (Path). Each algorithm was performed 500 times for 2D maps and 300 times for 3D maps.
Table 2 presents the results.
The simulations performed by the Probabilistic Foam method presented the highest number of generated bubbles in all maps. This happened mainly due to the propagation process of PFM, which conducts an approximated coverage of the entire free space. Moreover, PFM does not have any strategies to optimize the search. The results with the GBPF algorithm were the most inconstant. By analyzing the maximum and minimum processing time for the Narrow map, GBPF presented slower and faster simulations compared with the other methods. On average, GBPF presented the shortest processing time for all maps but the Narrow one. For the last three maps, the Radius-biased Probabilistic Foam method presented the longest paths, since its foam propagates first through the wider passages on the map. In the environment with one passage (Narrow map), RBPF was the fastest algorithm on average.
The main feature of HPF is to find paths with the lowest cost, and the results show that HPF found the shortest paths in all maps. For instance, we ran 500 simulations in Map 2 and the resulted path did not pass through the narrow passage in only 18 of them. Besides, GBPF and HPF presented the lowest number of computed bubbles in relation to the other two methods in all maps.
In Map 4, the dimension of the configuration space is 3D and was considered many obstacles in a complex layout. The methods PFM and RBPF presented a very high number of computed bubbles, which results in a high processing time. On the other hand, both GBPF and HPF were not affected by the increase of the configuration space dimension, presenting a high number of expanded bubbles (as well as the Complex map in 2D), but with low processing time.
Notice that the paths are not smooth, which can be a problem when considering a practical application. However, it is possible to apply optimization techniques to smooth the paths obtained from the probabilistic foam methods, as shown in [
30], ensuring both safe and smooth paths.
Measuring the Safety
Considering the same four maps, the values of
for maps Narrow, Simple, Complex, and Complex 3D are 4, 5, 4, and 2, respectively. The Safety Metric
averages for the simulations are presented in
Table 3.
The RBPF method presented the best results regarding safety for all maps, as can be seen in
Table 3. This result was expected, since this method presents a higher probability to propagate the probabilistic foam through more large passages; obtain rosaries with large bubbles; and consequently, obtain safer paths.
Observing the safety results for the Simple map, there is a clear difference; PFM and RBPF presented high safety values and the methods GBPF and HPF presented the lowest one. The Simple map presents two possible routes, the longer one is safer than the shorter one. Additionally, the rosaries of these methods presented the most regular bubbles, as shown in
Figure 10, and due to the low standard deviation and the high max and min values, it is possible to infer that all obtained paths passed through the longer route. On, the other hand, GBPF and HPF presented a high max value and very low min value. Additionally, they have high std values. In this way, it is possible to infer that the obtained paths for these methods passed through both possible routes but, on average, most paths passed through the short passage.
For the Complex map, the GBPF method presented the most unfavorable results. Due to the propagation strategy of GBPF, its rosary usually presents irregular and small bubbles, which means that some segments of the path are close to an obstacle. For both the Narrow and Complex maps, on average, HPF obtained paths safer than PFM and GBPF.
Finally, for the Complex map, the results were similar to the Simple map for the same reason: RBPF and PFM planned paths passed through the larger spaces in the map and GBPF and HPF converged guided by the goal configuration, generating paths that passed through the narrow passages. However, all methods based on probabilistic foam will generate paths with acceptable safety, since they all have rosary with bubbles with at least a minimal acceptable radius. In other words, all methods based on probabilistic foam will generate paths with acceptable safety.
6. Conclusions and Future Works
In this paper, we presented some contributions to the robot path planner called the Probabilistic Foam method (PFM). First, an approach to set the value of the constant
K was formalized, which facilitates understanding of how the method works. Next, we presented three variants of the original PFM: Goal-biased Probabilistic Foam (GBPF), first proposed in [
34]; Radius-Biased Probabilistic Foam (RBPF); and Heuristic-Guided Probabilistic Foam (HPF). The last two methods were proposed in this paper. Some simulations were made to analyze the performance of all these methods.
The original PFM and RBPF present similar results, where both find high clearance paths. However, PFM is recommended when free space coverage is necessary, and RBPF can be used when it is most important to find the safest route. The algorithms GBPF and HPF are variants that solve path planning problems by generating a few bubbles and finding paths with low processing times. An advantage of HPF over all variants is the heuristic function that helps it to find shorter paths, maintaining an acceptable safety.
The method RBPF considers only the information of the bubble’s radius as a metric for parent bubble selection. Thus, in future works, we consider investigating metrics that can be used alongside the bubble’s radius to bias the search and find safer paths, decrease the number of computed bubbles, and reduce the searching time.
The new approach to finding the value of K is an interesting achievement because the methods PFM, RBPF, and HPF only need to deal with one adjustable parameter, the minimum radius admissible for a given environment.
We noticed an increase in the processing time when the complexity of the environment was increased for some maps. In future works, we intend to investigate some strategies to improve the computational efficiency of the methods, making implementation of the method possible for real-time applications.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}