
Underlying Topography Inversion Using Dual Polarimetric TomoSAR


Abstract
1. Introduction
2. Materials and Methods
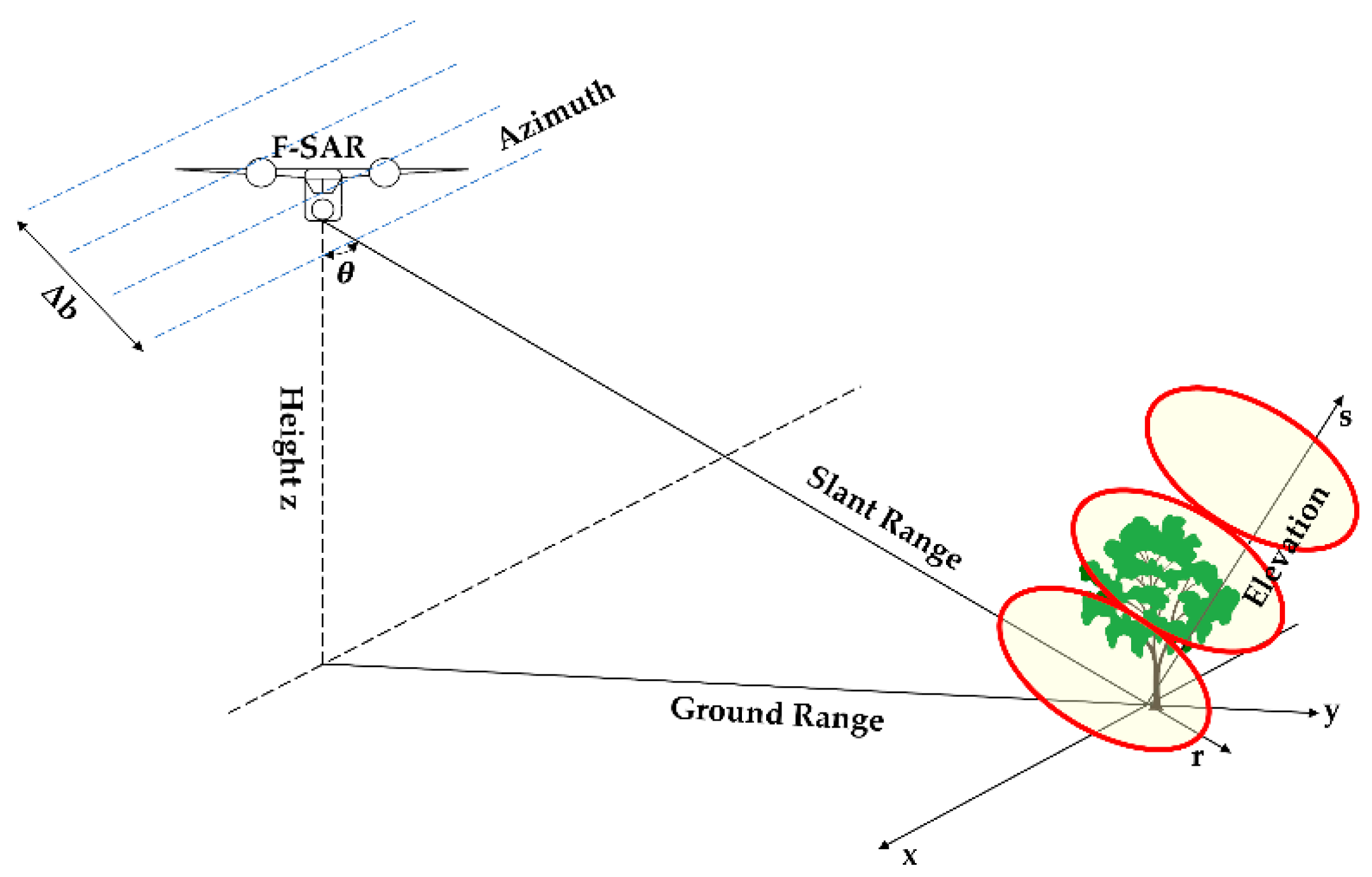
2.1. DP-TomoSAR Model
2.2. Classical Spectral Estimation Methods for DP-TomoSAR
2.2.1. DP-Beamforming Estimator
2.2.2. DP-Capon Estimator
2.2.3. DP-MUSIC Estimator
3. Numerical Simulation
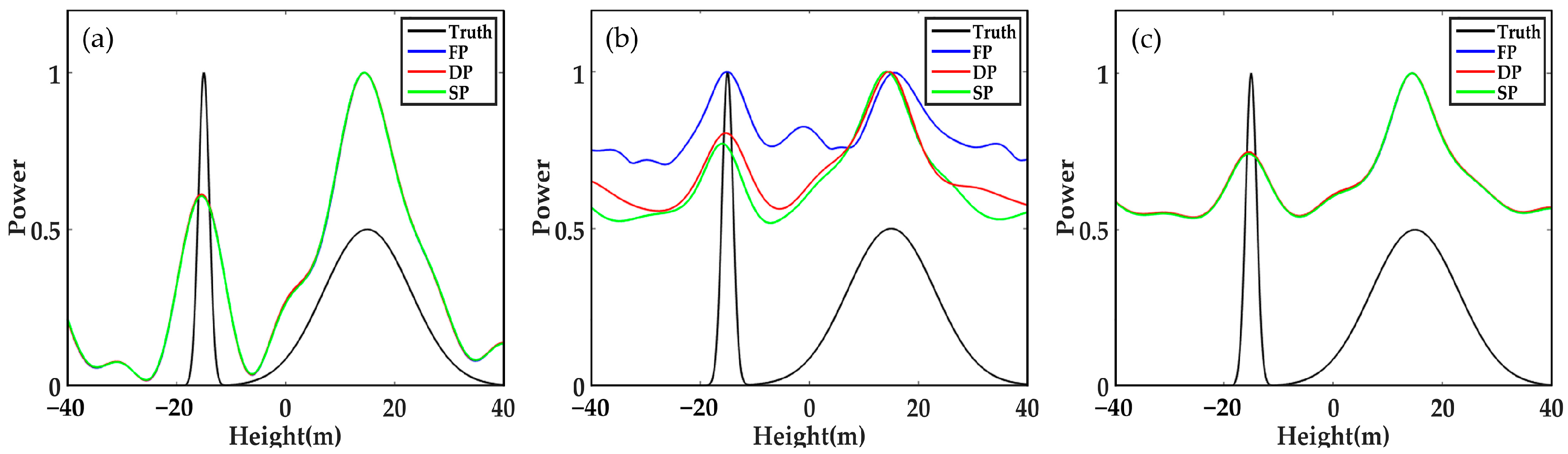
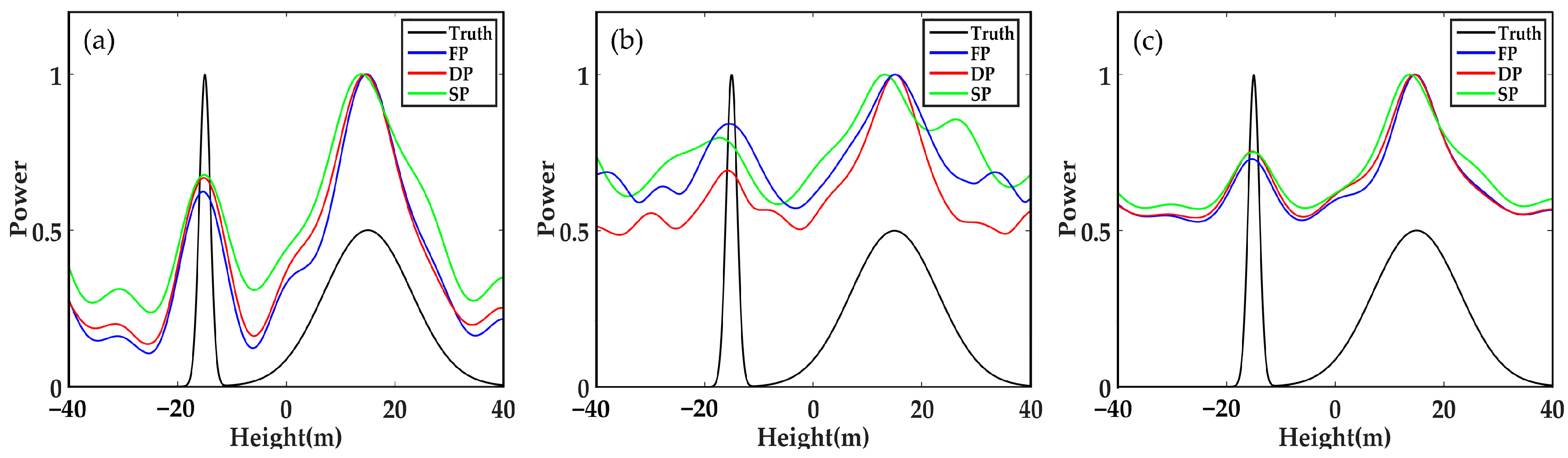
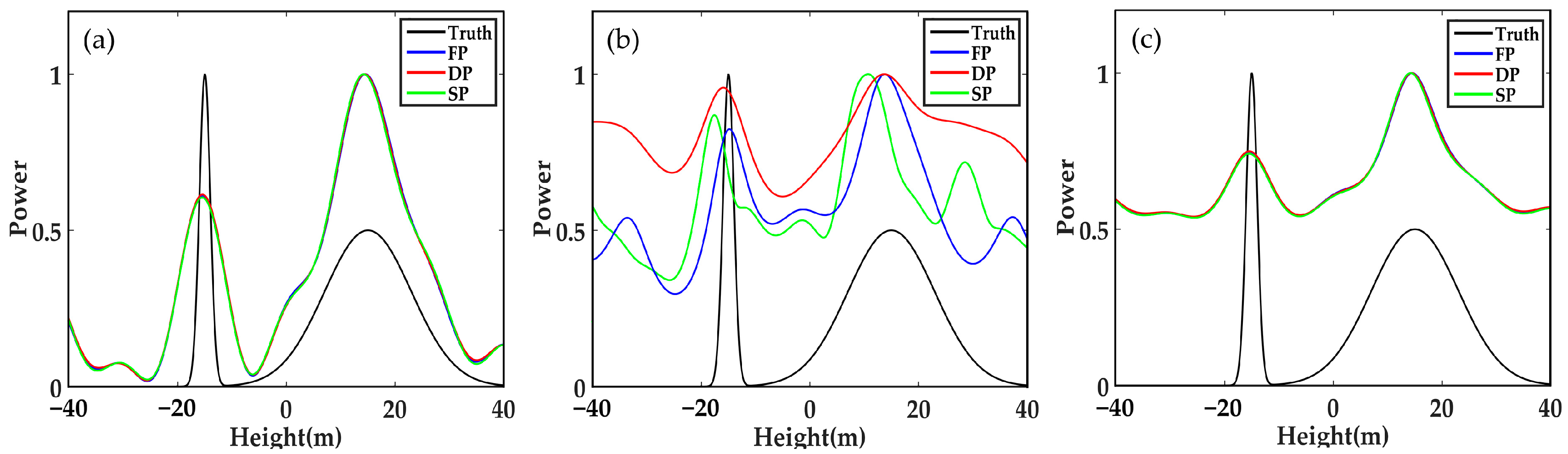
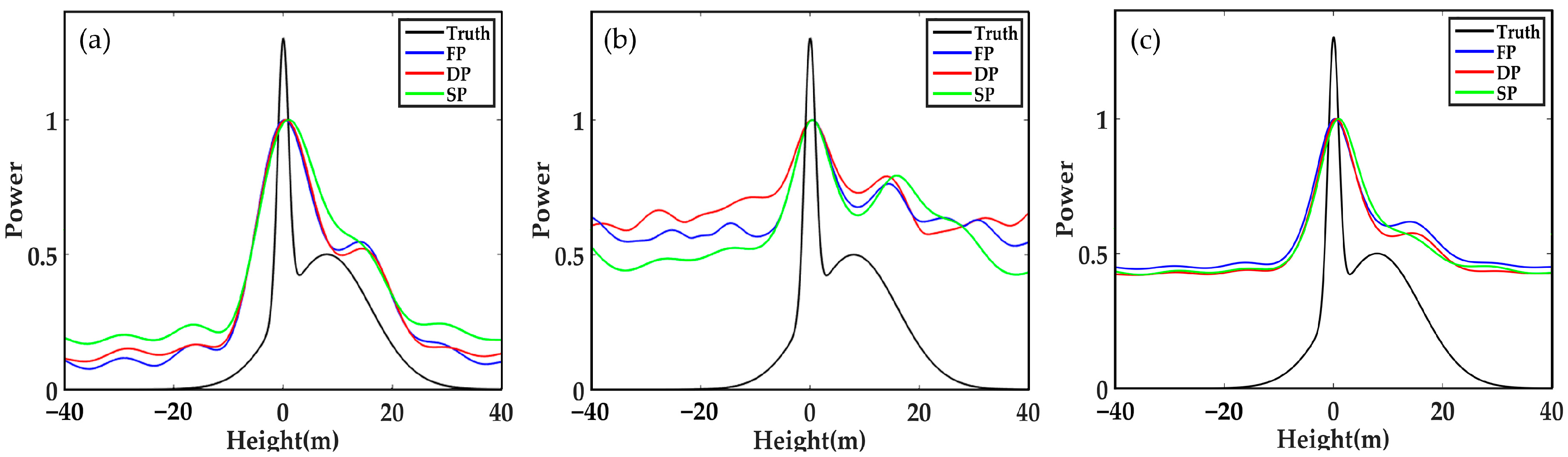
3.1. Forest Vertical Profile Reconstruction
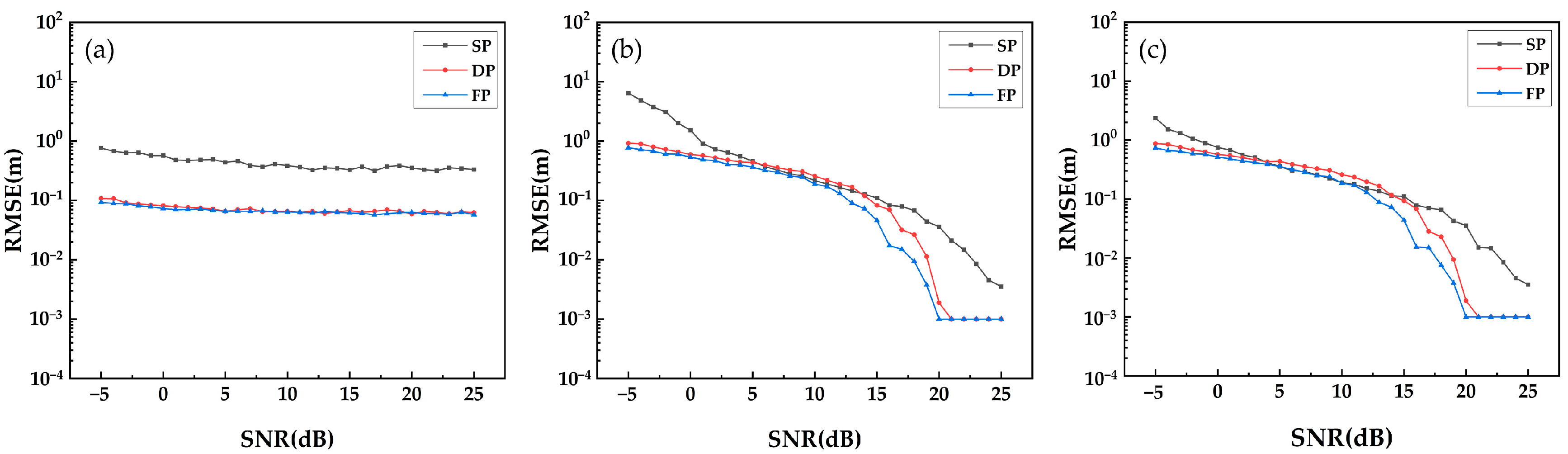
- (1)
- different SNR;
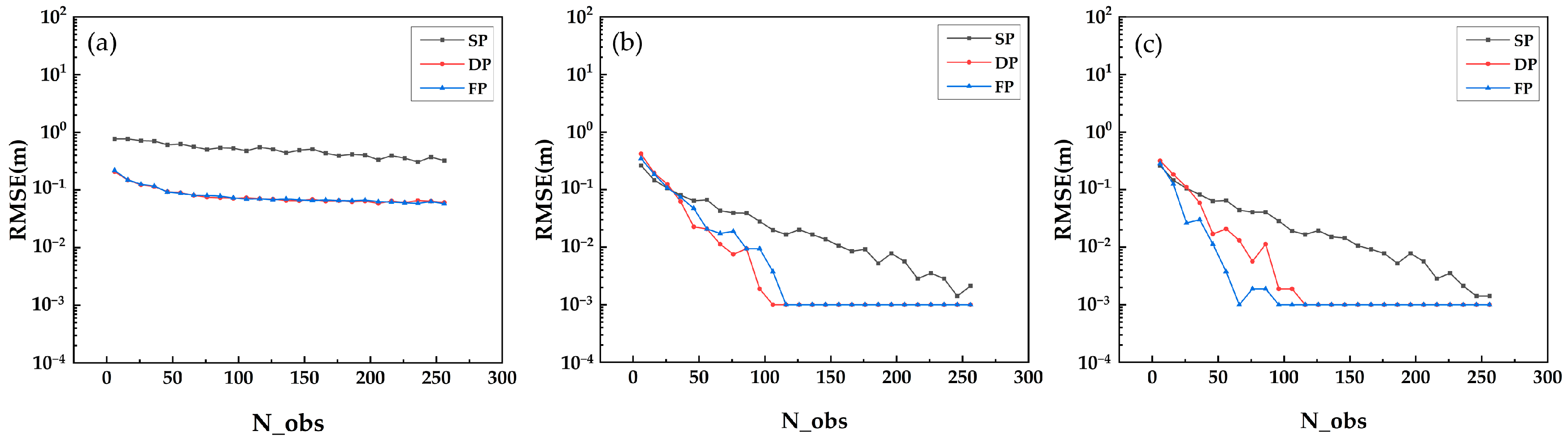
- (2)
- different number of looks (N_obs);
- (3)
- different height difference between the scattering centres of ground and canopy (Δh).
3.2. Statisitical Analysis of the Scatterer Separation
4. Experiments and Results
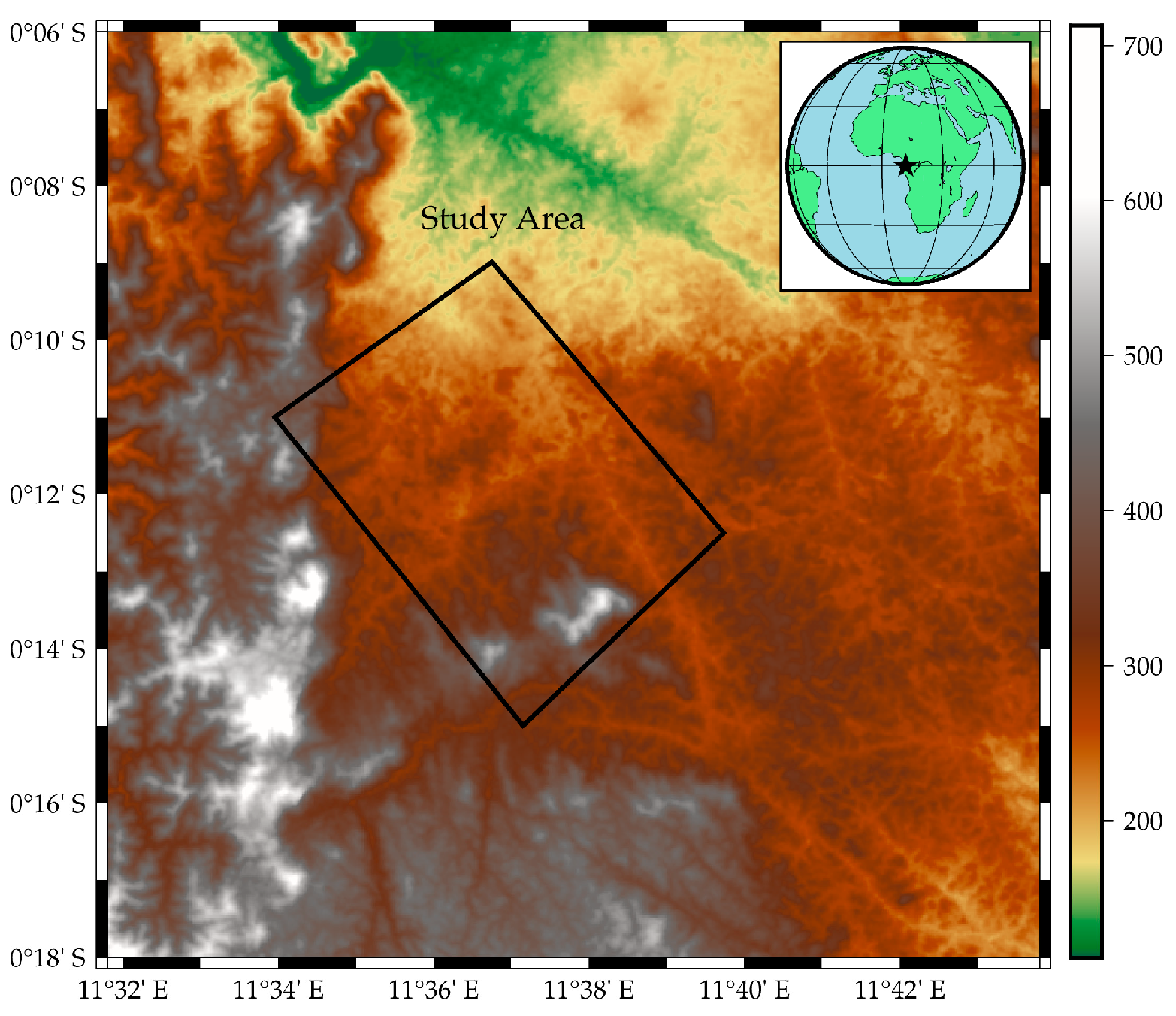
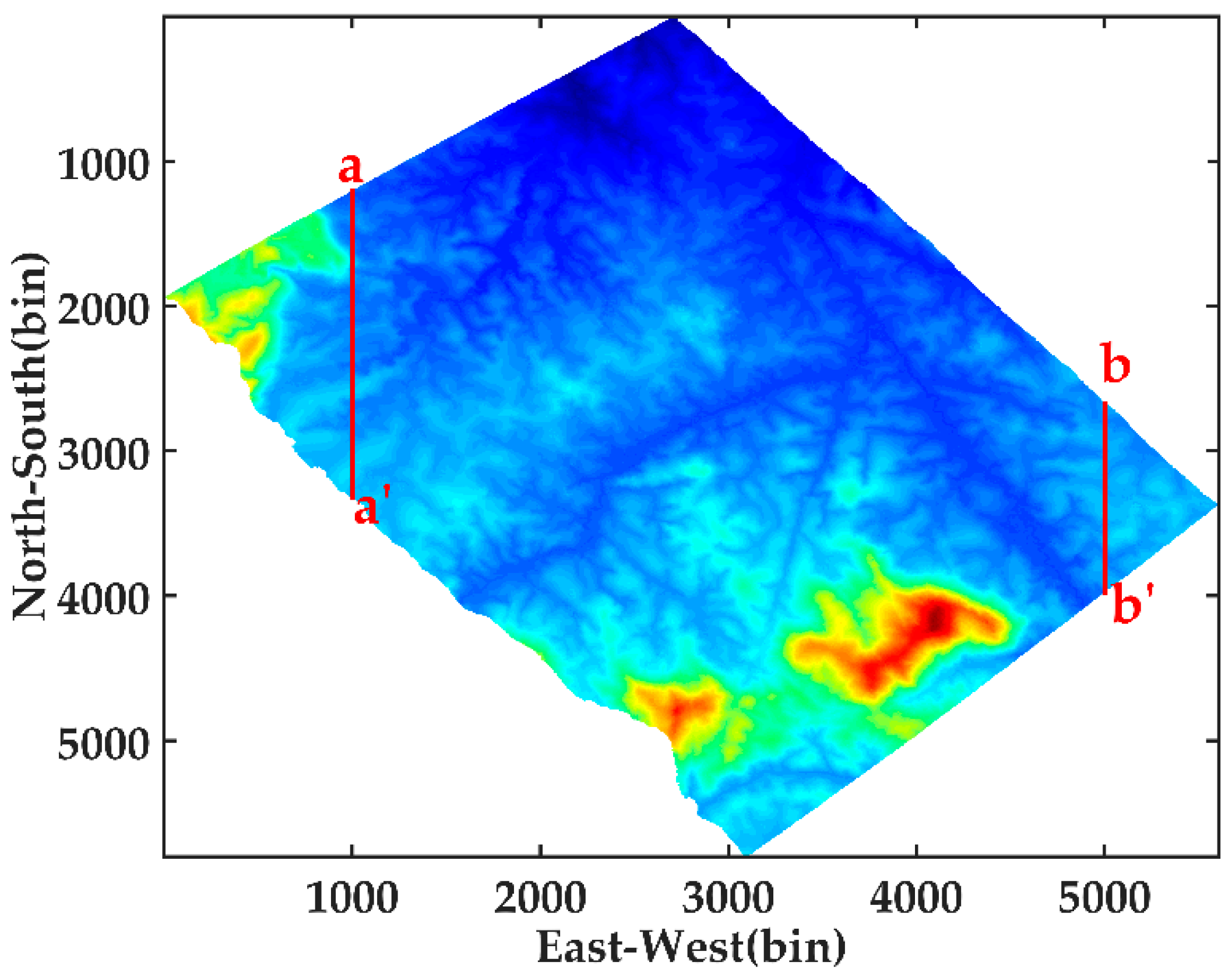
4.1. Study Area and Datasets
4.2. Results and Analysis
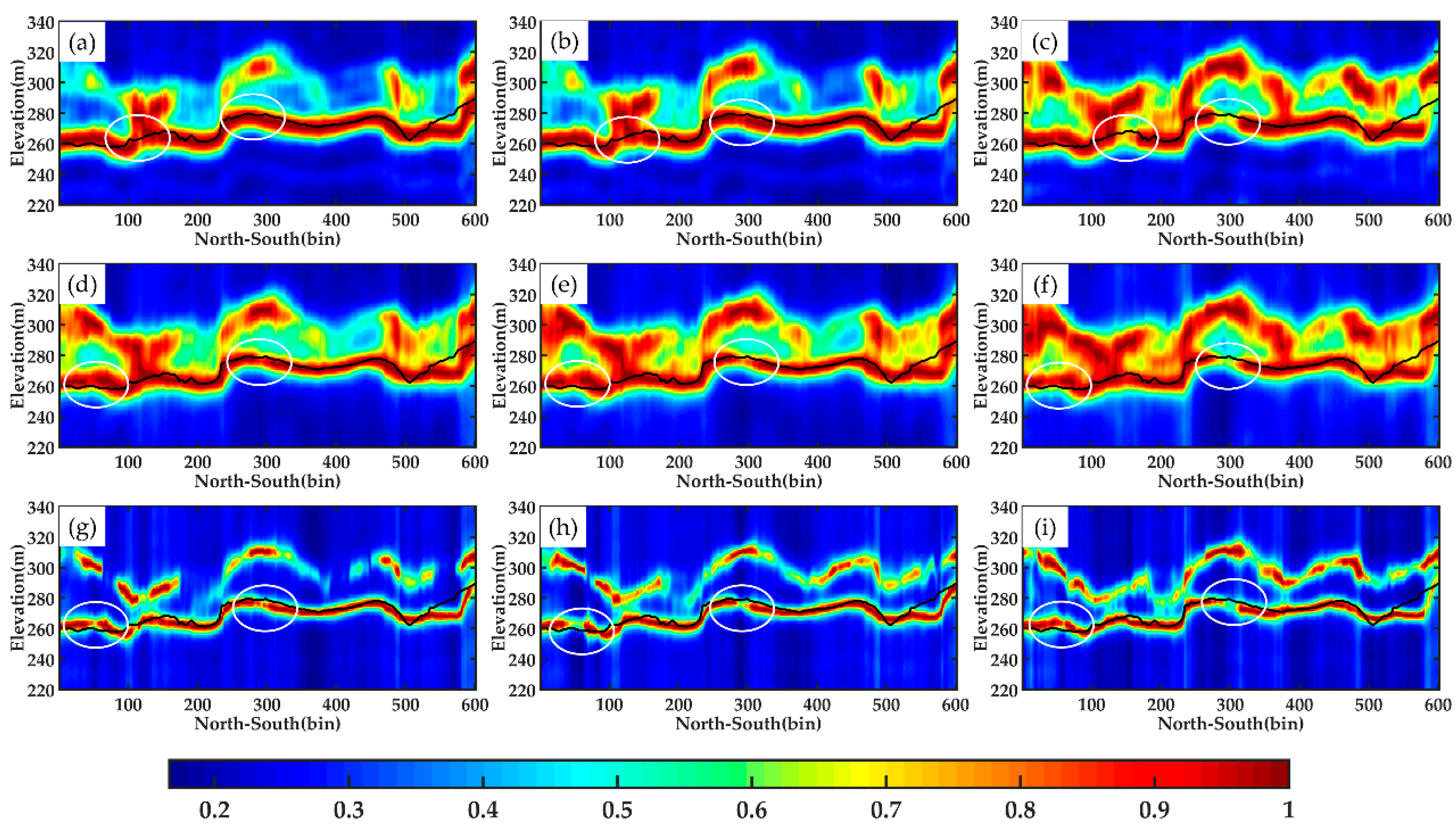
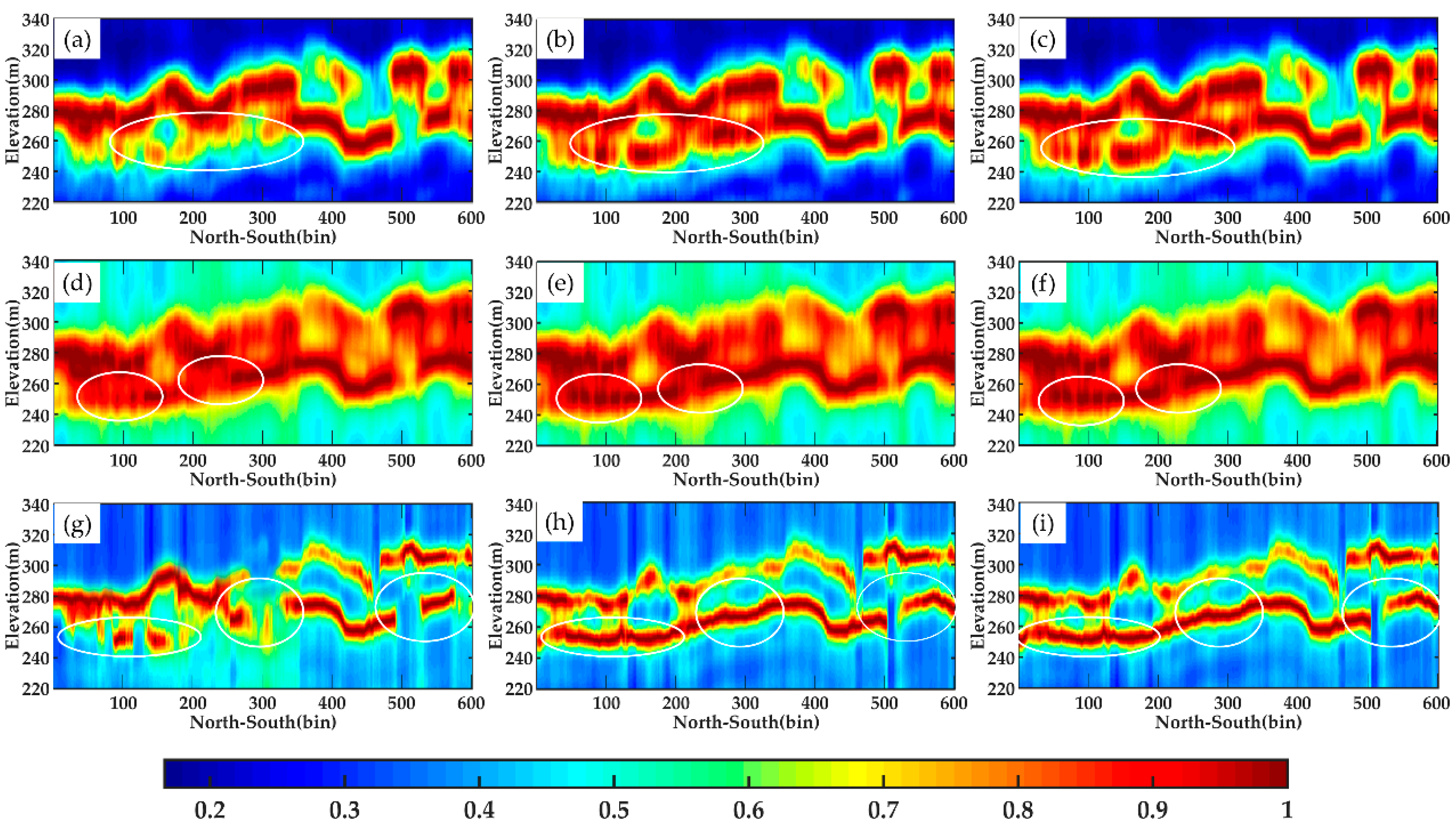
4.2.1. Tomograms with Different Combinations
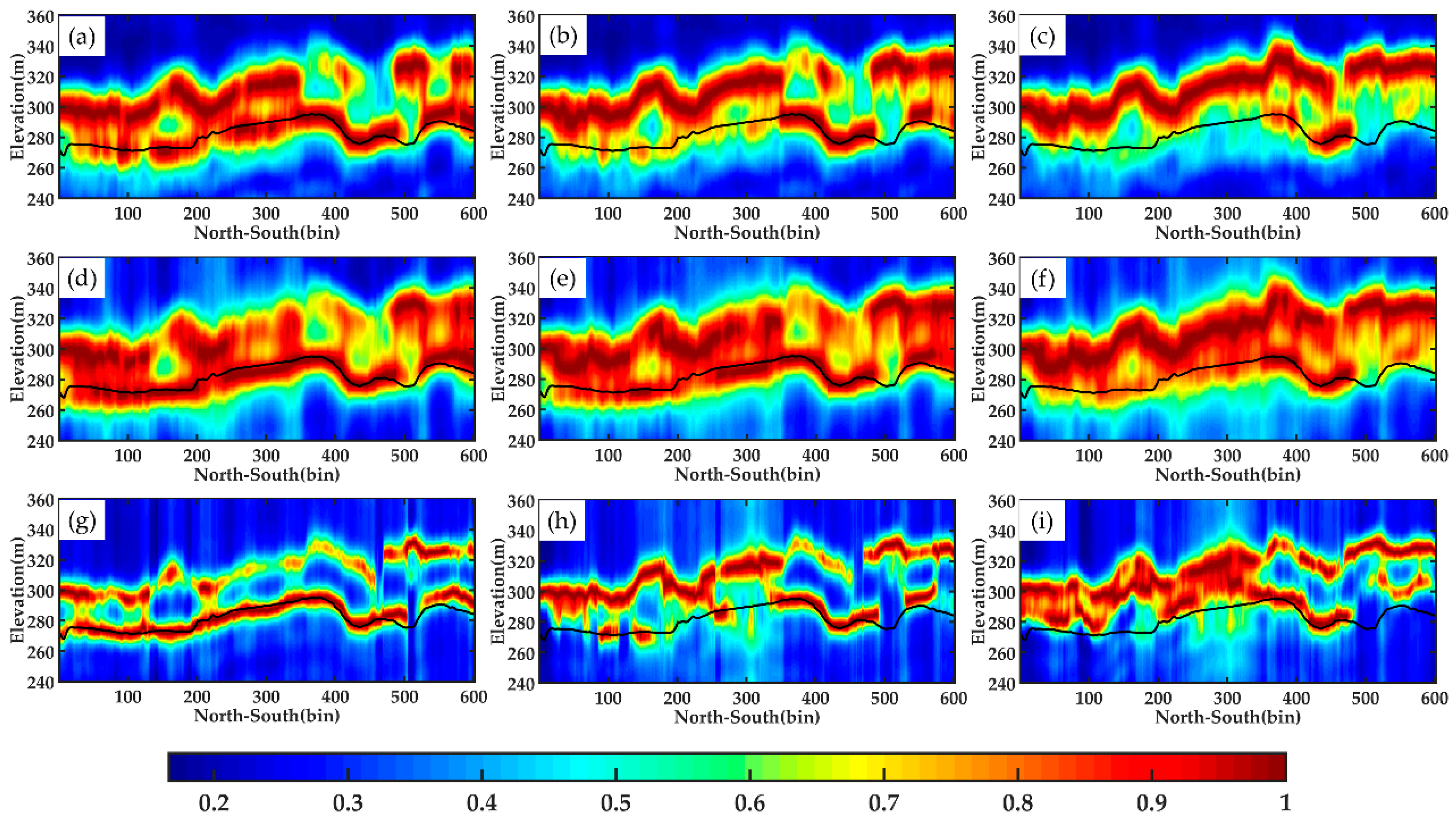
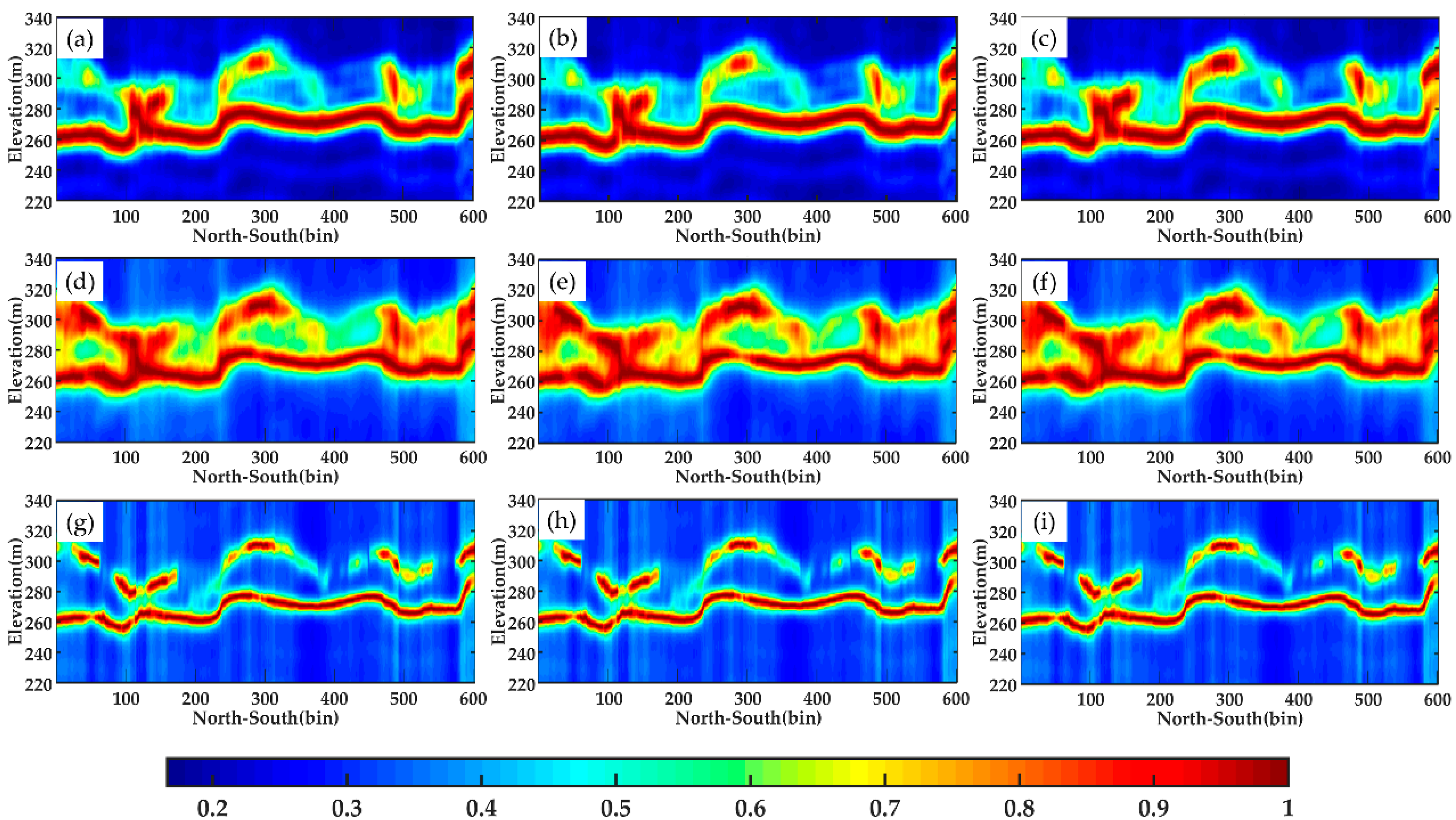
4.2.2. Tomograms with Different Polarization Mode
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, J.; Xing, Y.; Qin, L.; Xia, T. Ground Elevation Accuracy Verification by Using ICESat-2 Data under Forest. Infrared Laser Eng. 2020, 49, 122–131. [Google Scholar]
- Cazcarra-Bes, V.; Pardini, M.; Tello, M.; Papathanassiou, K.P. Comparison of Tomographic SAR Reflectivity Reconstruction Algorithms for Forest Applications at L-Band. IEEE Trans. Geosci. Remote Sens. 2019, 58, 1–18. [Google Scholar] [CrossRef]
- Li, L. Forest Vertical Information Extraction Based on P-Band SAR Tomography. Ph.D. Thesis, Chineese Academy of Forestry, Beijing, China, 2016. [Google Scholar]
- Minh, D.H.T.; Le Toan, T.; Rocca, F.; Tebaldini, S.; Villard, L.; Réjou-Méchain, M.; Phillips, O.L.; Feldpausch, T.R.; Dubois-Fernandez, P.; Scipal, K.; et al. SAR Tomography for the Retrieval of Forest Biomass and Height: Cross-Validation at Two Tropical Forest Sites in French Guiana. Remote Sens. Environ. 2016, 175, 138–147. [Google Scholar] [CrossRef]
- Peng, X.; Li, X.; Wang, C.; Zhu, J.; Liang, L.; Fu, H. SPICE-Based SAR Tomography over Forest Areas Using a Small Number of P-Band Airborne F-SAR Images Characterized by Non-Uniformly Distributed Baselines. Remote Sens. 2019, 11, 975. [Google Scholar] [CrossRef]
- Aghababaee, H.; Sahebi, M.R. Model-Based Target Scattering Decomposition of Polarimetric SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2018, 56, 972–983. [Google Scholar] [CrossRef]
- Peng, X.; Wang, C.; Li, X.; Du, Y.; Fu, H.; Yang, Z.; Xie, Q. Three-Dimensional Structure Inversion of Buildings with Nonparametric Iterative Adaptive Approach Using SAR Tomography. Remote Sens. 2018, 10, 1004. [Google Scholar] [CrossRef]
- Minh, D.H.T.; Le Toan, T.; Rocca, F.; Tebaldini, S.; d’Alessandro, M.M.; Villard, L. Relating P-Band Synthetic Aperture Radar Tomography to Tropical Forest Biomass. IEEE Trans. Geosci. Remote Sens. 2013, 52, 967–979. [Google Scholar] [CrossRef]
- Aghababaei, H.; Ferraioli, G.; Ferro-Famil, L.; Huang, Y.; d’Alessandro, M.M.; Pascazio, V.; Schirinzi, G.; Tebaldini, S. Forest SAR Tomography: Principles and Applications. IEEE Geosci. Remote Sens. Mag. 2020, 8, 30–45. [Google Scholar] [CrossRef]
- Lombardini, F.; Reigber, A. Adaptive Spectral Estimation for Multibaseline SAR Tomography with Airborne L-Band Data. In Proceedings of the IGARSS 2003 2003 IEEE International Geoscience and Remote Sensing Symposium, Proceedings (IEEE Cat. No. 03CH37477), Toulouse, France, 21–25 July 2003; Volume 3, pp. 2014–2016. [Google Scholar]
- Reigber, A.; Moreira, A.; Papathanassiou, K.P. First Demonstration of Airborne SAR Tomography Using Multibaseline L-Band Data. In Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002. [Google Scholar]
- Frey, O.; Morsdorf, F.; Meier, E. Tomographic Imaging of a Forested Area by Airborne Multi-Baseline P-Band SAR. Sensors 2008, 8, 5884–5896. [Google Scholar] [CrossRef] [PubMed]
- Sauer, S.; Ferro-Famil, L.; Reigber, A.; Pottier, E. Three-Dimensional Imaging and Scattering Mechanism Estimation over Urban Scenes Using Dual-Baseline Polarimetric InSAR Observations at L-Band. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4616–4629. [Google Scholar] [CrossRef]
- Fornaro, G.; Serafino, F.; Soldovieri, F. Three-Dimensional Focusing with Multipass SAR Data. IEEE Trans. Geoence Remote Sens. 2003, 41, 7–517. [Google Scholar] [CrossRef]
- Frey, O.; Meier, E. Analyzing Tomographic SAR Data of a Forest with Respect to Frequency, Polarization, and Focusing Technique. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3648–3659. [Google Scholar] [CrossRef]
- Nannini, M.; Scheiber, R.; Moreira, A. Estimation of the Minimum Number of Tracks for SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2009, 47, 531–543. [Google Scholar] [CrossRef]
- Ertin, E.; Moses, R.; Potter, L. Interferometric Methods for Three-Dimensional Target Reconstruction with Multipass Circular SAR. IET Radar Sonar Navig. 2010, 4, 464–473. [Google Scholar] [CrossRef]
- Huang, Y.; Ferro-Famil, L.; Reigber, A. Under-Foliage Object Imaging Using SAR Tomography and Polarimetric Spectral Estimators. IEEE Trans. Geosci. Remote Sens. 2011, 50, 2213–2225. [Google Scholar] [CrossRef]
- Liang, L.; Guo, H.; Li, X. Three-Dimensional Structural Parameter Inversion of Buildings by Distributed Compressive Sensing-Based Polarimetric SAR Tomography Using a Small Number of Baselines. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4218–4230. [Google Scholar] [CrossRef]
- Huang, Y. Tomographic Processing of Polarimetric and Interferometric SAR Data for Urban and Forestry Remote Sensing. Ph.D. Thesis, European University of Brittany, Rennes, France, 2011. [Google Scholar]
- Ferro-Famil, L.; Huang, Y.; Pottier, E. Principles and Applications of Polarimetric SAR Tomography for the Characterization of Complex Environments. In VIII Hotine-Marussi Symposium on Mathematical Geodesy; Springer: Cham, Switzerland, 2015; pp. 243–255. [Google Scholar]
- Jianjun, Z.; Zhiwei, L.; Jun, H. Research Progress and Methods of InSAR for Deformation Monitoring. Acta Geod. Cartogr. Sin. 2017, 46, 1717. [Google Scholar]
- Velotto, D.; Migliaccio, M.; Nunziata, F.; Lehner, S. Dual-Polarized TerraSAR-X Data for Oil-Spill Observation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4751–4762. [Google Scholar] [CrossRef]
- Kugler, F.; Hajnsek, I.; Papathanassiou, K. Dual Pol-InSAR Forest Height Estimation by Means of TanDEM-X Data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 1–4. [Google Scholar]
- Kugler, F.; Hajnsek, I. Forest Characterisation by Means of TerraSAR-X and TanDEM-X (Polarimetric and) Interferometric Data. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 2578–2581. [Google Scholar]
- Li, H.; Wang, Y.; Luo, X. Tree Height Estimation at Plateau Mountains, Northwestern Sichuan, China Using Dual Pol-InSAR Data. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 4698–4701. [Google Scholar]
- Wenxue, F.; Huadong, G.; Xinwu, L.; Bangsen, T.; Zhongchang, S. Extended Three-Stage Polarimetric SAR Interferometry Algorithm by Dual-Polarization Data. IEEE Trans. Geosci. Remote Sens. 2015, 54, 2792–2802. [Google Scholar] [CrossRef]
- Jr, E.; Parks, T.M. Direction Finding with an Array of Antennas Having Diverse Polarizations. IEEE Trans. Antennas Propag. 1983, 31, 231–236. [Google Scholar]
- Homer, J.; Longstaff, I.D.; Callaghan, G. High Resolution 3-D SAR via Multi-Baseline Interferometry. In Proceedings of the IGARSS ’96. 1996 International Geoscience and Remote Sensing Symposium, Lincoln, NE, USA, 27–31 May 1996. [Google Scholar]
- Capon, J. High-Resolution Frequency-Wavenumber Spectrum Analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Stoica, P.; Moses, R.L. Spectral Analysis of Signals; Prentice Hall: Hoboken, NJ, USA, 2005. [Google Scholar]
- Schmidt, R.; Schmidt, R.O. Multiple Emitter Location and Signal Parameter Estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Gini, F.; Lombardini, F.; Montanari, M. Layover Solution in Multibaseline SAR Interferometry. IEEE Trans. Aerosp. Electron. Syst. AES 2002, 38, 1344–1356. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Moritz, H. Introduction to Spectral Analysis. In Mathematical and Numerical Techniques in Physical Geodesy; Springer: Berlin, Germany, 1986; pp. 157–259. [Google Scholar]
- Gini, F.; Lombardini, F. Multibaseline Cross-Track SAR Interferometry: A Signal Processing Perspective. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 71–93. [Google Scholar] [CrossRef]
- Bienvenu, G. Influence of the Spatial Coherence of the Background Noise on High Resolution Passive MethodsSpeech, & Signal Processing. In Proceedings of the IEEE International Conference on Acoustics, Washington, DC, USA, 2–4 April 1979. [Google Scholar]
- Cao, K.; Tan, W.; Li, X.; Xu, W.; Peng, X. Monitoring Broadleaf Forest Pest Based on L-Band SAR Tomography. IOP Conf. Ser. Earth Environ. Sci. 2019, 237, 052004. [Google Scholar] [CrossRef]
- Cazcarra-Bes, V.; Tello-Alonso, M.; Papathanassiou, K. 3D Forest Structure Estimation from SAR Tomography by Means of a Full Rank Polarimetric Inversion Based on Compressive Sensing. In Proceedings of the ESA POLinSAR Workshop, Frascati, Italy, 26–30 January 2015; pp. 26–30. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wavelength (m) | Polarization Mode | Platform Height (m) | Range of Incidence Angle (°) | Resolution of Range Direction (m) | Resolution of Azimuth Direction (m) |
|---|---|---|---|---|---|
| 0.6890 | HH + HV + VV | 6096 | 20−50 | 3.84 | 2 |
| Identifier | Obtaining Date | Baseline (m) |
|---|---|---|
| FL06-PS02 | 10 February 2016 | 0 |
| FL06-PS03 | 10 | |
| FL06-PS04 | 20 | |
| FL06-PS05 | 40 | |
| FL06-PS06 | 60 | |
| FL06-PS07 | 80 | |
| FL06-PS08 | −20 | |
| FL06-PS09 | −40 | |
| FL06-PS10 | −60 | |
| FL06-PS11 | −80 |
| Method | Data Type | RMSE (m) |
|---|---|---|
| Beamforming | SP | 9.24 |
| DP | 8.25 | |
| FP | 8.07 | |
| Capon | SP | 9.20 |
| DP | 8.09 | |
| FP | 7.92 | |
| MUSIC | SP | 9.18 |
| DP | 8.17 | |
| FP | 8.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, X.; Long, S.; Wang, Y.; Xie, Q.; Du, Y.; Pan, X. Underlying Topography Inversion Using Dual Polarimetric TomoSAR. Sensors 2021, 21, 4117. https://doi.org/10.3390/s21124117
Peng X, Long S, Wang Y, Xie Q, Du Y, Pan X. Underlying Topography Inversion Using Dual Polarimetric TomoSAR. Sensors. 2021; 21(12):4117. https://doi.org/10.3390/s21124117
Chicago/Turabian StylePeng, Xing, Shilin Long, Youjun Wang, Qinghua Xie, Yanan Du, and Xiong Pan. 2021. "Underlying Topography Inversion Using Dual Polarimetric TomoSAR" Sensors 21, no. 12: 4117. https://doi.org/10.3390/s21124117
APA StylePeng, X., Long, S., Wang, Y., Xie, Q., Du, Y., & Pan, X. (2021). Underlying Topography Inversion Using Dual Polarimetric TomoSAR. Sensors, 21(12), 4117. https://doi.org/10.3390/s21124117