
Vision-Based Hybrid Controller to Release a 4-DOF Parallel Robot from a Type II Singularity

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. 3UPS+RPU Parallel Robot
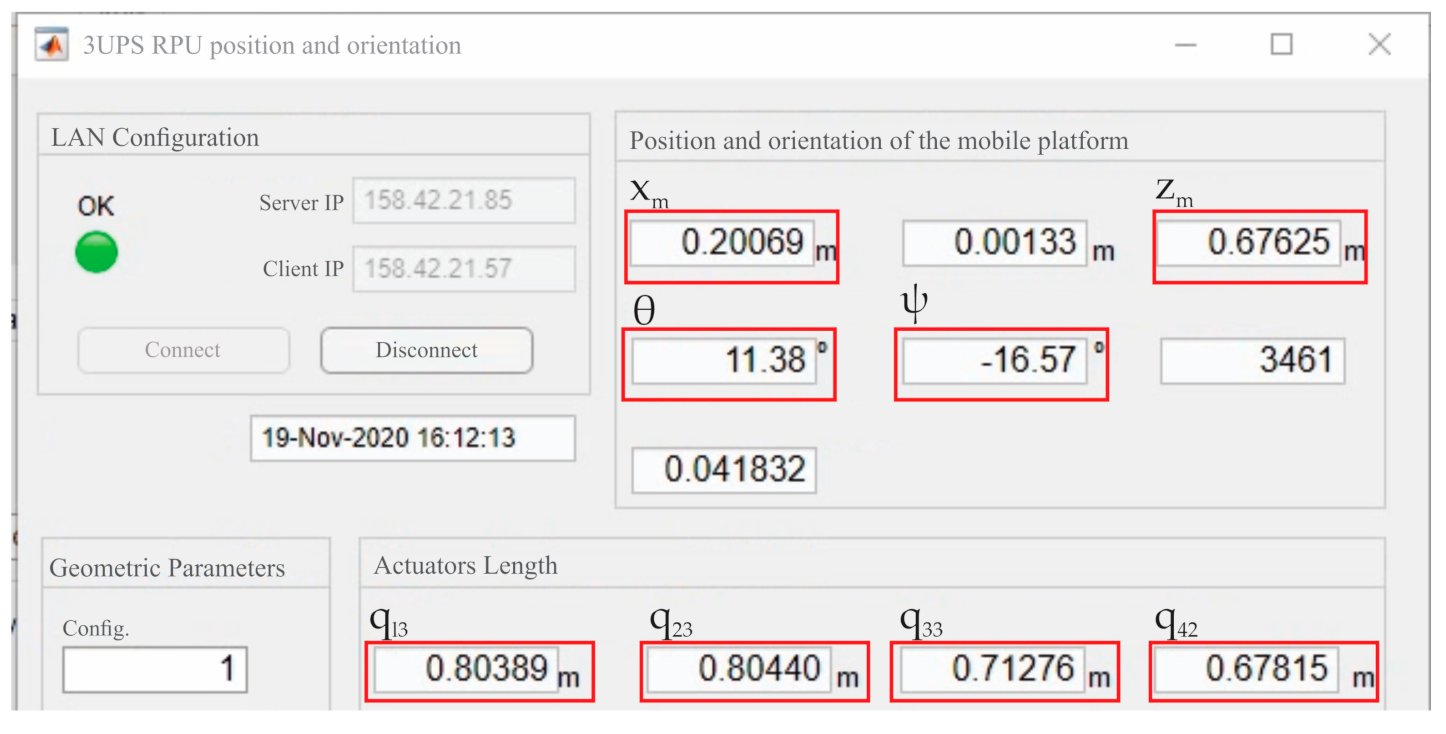
- The position (, ) and the orientation (, ) of the mobile platform.
- The orientation of the four universal joints: , for limbs and , for limb 4.
- The length of the four linear actuators given by for limbs and for limb 4.
- The orientation of the three spherical joints represented by , , for external limbs .
- The orientation of the revolute joint .
2.2. Type II Singularities
2.3. Angle between Two Output Twist Screws
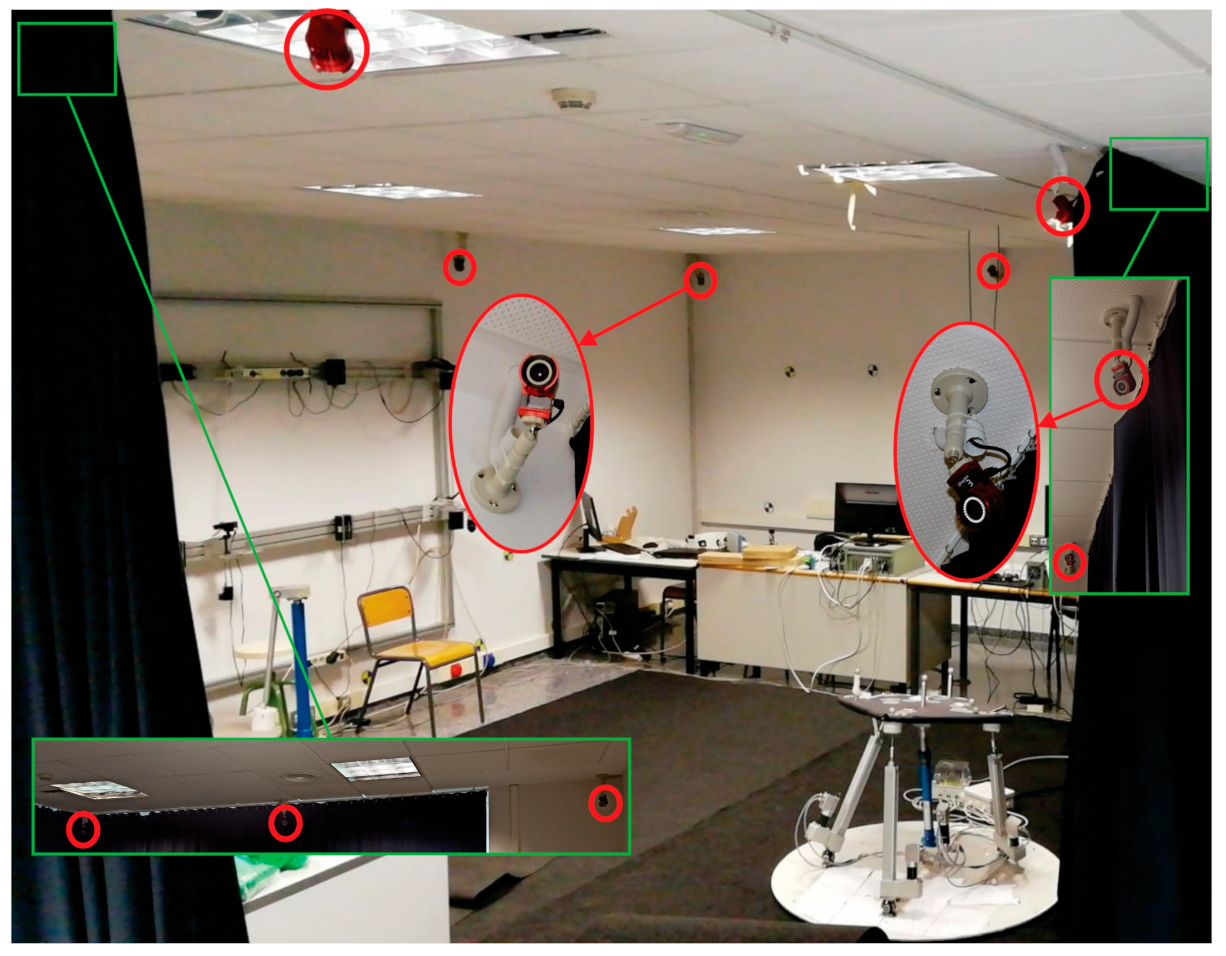
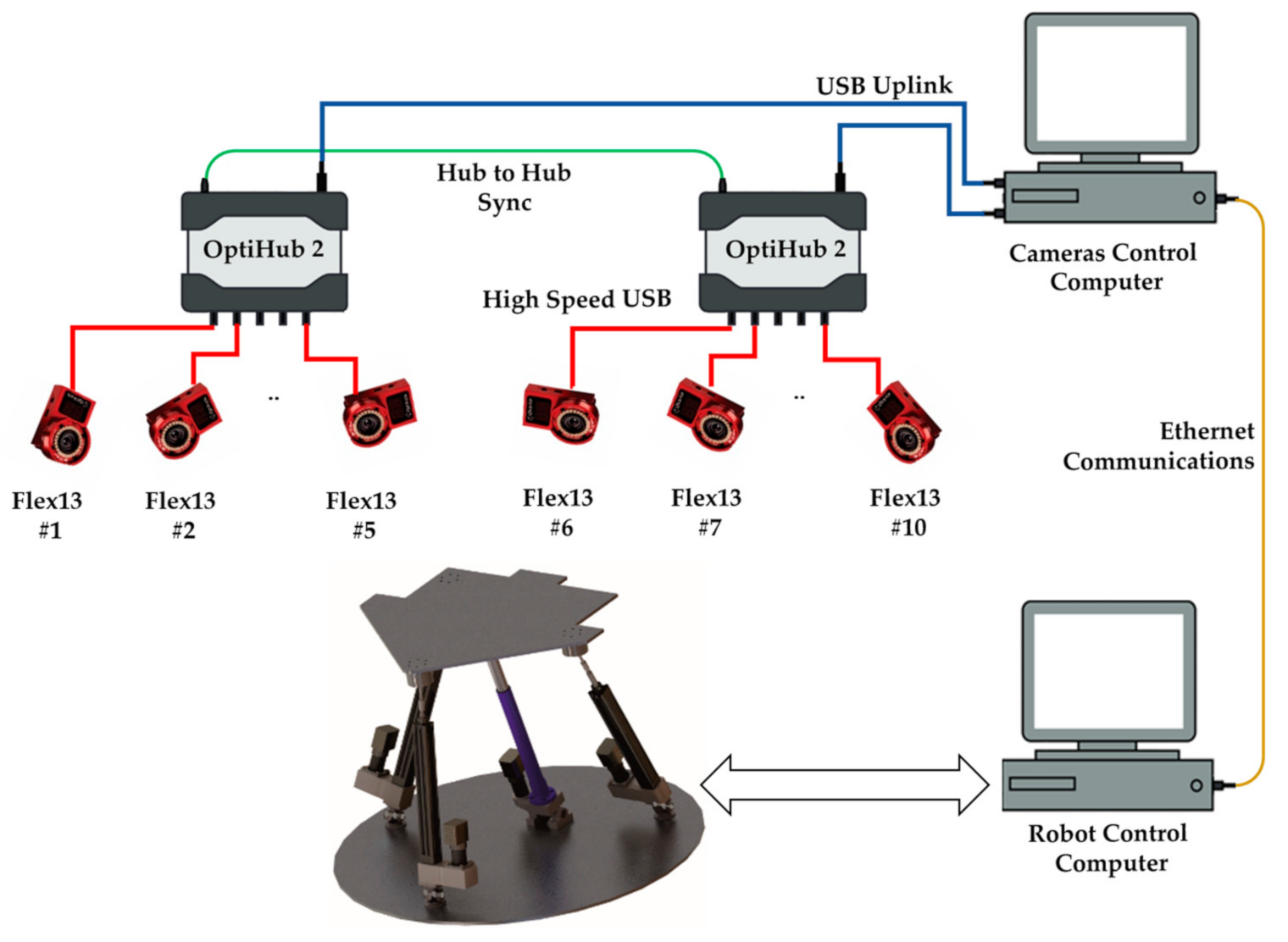
2.4. 3D Tracking System
2.5. Hybrid Controller Description
| Algorithm 1. Initialization 3 |
| INITIALIZATION number of columns of . BEGIN IF minimum element in IF OR IF ELSEIF ELSEIF ELSEIF ELSEIF ELSE ENDIF column vector of zeros FOR IF (element-wise comparison) Solve the Forward Kinematics for , using as initial condition Angle of spherical joints for IF (element-wise comparison) Calculate the index for with ENDIF ENDIF ENDFOR ENDIF ENDIF END |
3. Results
3.1. Simulation of the Vision-Based Hybrid Controller
- The mean absolute error (MAE)
- The mean absolute percentage error (MAPE)
- The mean distance travelled for type II singularity release (MDSR)where is the number of samples taken after the activation of at instant , and and are the actuator and the time instant, respectively.
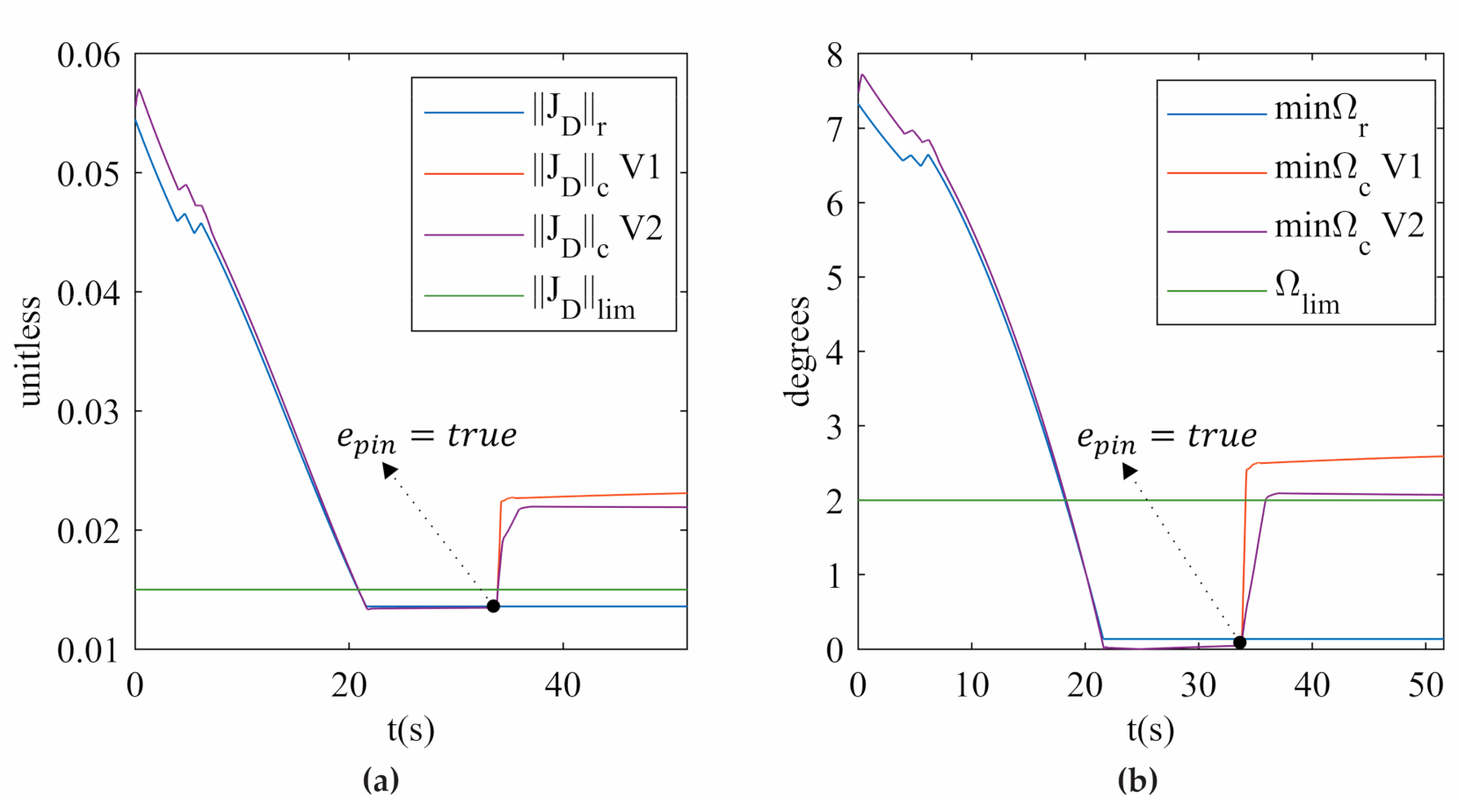
3.2. Experimentation of the Vision-Based Hybrid Controller
- is provided by processing the data stream from the 3DTS in real time.
- During the 15 s before the SRM is activated, an external perturbation is applied to the PR. Since in a type II Singularity the PR can vary its position and orientation without moving any actuators, the researcher can apply some forces to the PR by hand to check whether the mobile platform experiences uncontrolled motion.
4. Discussion
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Briot, S.; Khalil, W. Dynamics of Parallel Robots—From Rigid Links to Flexible Elements; Springer: Berlin/Heidelberg, Germany, 2015; ISBN 978-3-319-19787-6. [Google Scholar]
- Patel, Y.D.; George, P.M. Parallel Manipulators Applications—A Survey. Mod. Mech. Eng. 2012, 2, 57–64. [Google Scholar] [CrossRef]
- Aliakbari, M.; Mahboubkhah, M. An adaptive computer-aided path planning to eliminate errors of contact probes on free-form surfaces using a 4-DOF parallel robot CMM and a turn-table. Meas. J. Int. Meas. Confed. 2020, 166, 108216. [Google Scholar] [CrossRef]
- Xie, S. Advanced Robotics for Medical Rehabilitation: Current State of the Art and Recent Advances; Springer: Cham, Switzerland, 2016; ISBN 978-3-319-19895-8. [Google Scholar]
- Díaz, I.; Gil, J.J.; Sánchez, E. Lower-Limb Robotic Rehabilitation: Literature Review and Challenges. J. Robot. 2011, 2011, 759764. [Google Scholar] [CrossRef]
- Sui, P.; Yao, L.; Lin, Z.; Yan, H.; Dai, J.S. Analysis and synthesis of ankle motion and rehabilitation robots. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 2533–2538. [Google Scholar] [CrossRef]
- Ai, Q.; Zhu, C.; Zuo, J.; Meng, W.; Liu, Q.; Xie, S.; Yang, M. Disturbance-Estimated Adaptive Backstepping Sliding Mode Control of a Pneumatic Muscles-Driven Ankle Rehabilitation Robot. Sensors 2017, 18, 66. [Google Scholar] [CrossRef]
- Atashzar, S.F.; Shahbazi, M.; Patel, R.V. Haptics-enabled Interactive NeuroRehabilitation Mechatronics: Classification, Functionality, Challenges and Ongoing Research. Mechatronics 2019, 57, 1–19. [Google Scholar] [CrossRef]
- Kataoka, Y.; Takeda, R.; Tadano, S.; Ishida, T.; Saito, Y.; Osuka, S.; Samukawa, M.; Tohyama, H. Analysis of 3-d kinematics using h-gait system during walking on a lower body positive pressure treadmill. Sensors 2021, 21, 2619. [Google Scholar] [CrossRef]
- Gosselin, C.; Angeles, J. Singularity Analysis of Closed-Loop Kinematic Chains. IEEE Trans. Robot. Autom. 1990, 6, 281–290. [Google Scholar] [CrossRef]
- Park, F.C.; Kim, J.W. Singularity Analysis of Closed Kinematic Chains. J. Mech. Des. 1999, 121, 32–38. [Google Scholar] [CrossRef]
- di Gregorio, R.; Parenti-Castelli, V. Mobility analysis of the 3-UPU parallel mechanism assembled for a pure translational motion. In Proceedings of the 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (Cat. No.99TH8399), Atlanta, GA, USA, 19–23 September 1999; IEEE: New York, NY, USA, 1999; pp. 520–525. [Google Scholar]
- Slavutin, M.; Shai, O.; Sheffer, A.; Reich, Y. A novel criterion for singularity analysis of parallel mechanisms. Mech. Mach. Theory 2019, 137, 459–475. [Google Scholar] [CrossRef]
- Voglewede, P.A.; Ebert-Uphoff, I. Measuring “closeness” to singularities for parallel manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; IEEE: New York, NY, USA, 2004; Volume 5, pp. 4539–4544. [Google Scholar]
- Davidson, J.K.; Hunt, K.H.; Pennock, G.R. Robots and Screw Theory: Applications of Kinematics and Statics to Robotics. J. Mech. Des. 2004, 126, 763. [Google Scholar] [CrossRef]
- Yuan, M.S.C.; Freudenstein, F.; Woo, L.S. Kinematic Analysis of Spatial Mechanisms by Means of Screw Coordinates. Part 2—Analysis of Spatial Mechanisms. J. Eng. Ind. 1971, 93, 67. [Google Scholar] [CrossRef]
- Takeda, Y.; Funabashi, H. Motion Transmissibility of In-Parallel Actuated Manipulators. JSME Int. J. Ser. C Dyn. Control Robot. Des. Manuf. 1995, 38, 749–755. [Google Scholar] [CrossRef][Green Version]
- Wang, J.; Wu, C.; Liu, X.-J. Performance evaluation of parallel manipulators: Motion/force transmissibility and its index. Mech. Mach. Theory 2010, 45, 1462–1476. [Google Scholar] [CrossRef]
- Pulloquinga, J.L.; Mata, V.; Valera, Á.; Zamora-Ortiz, P.; Díaz-Rodríguez, M.; Zambrano, I. Experimental analysis of Type II singularities and assembly change points in a 3UPS+RPU parallel robot. Mech. Mach. Theory 2021, 158, 104242. [Google Scholar] [CrossRef]
- Scalera, L.; Carabin, G.; Vidoni, R.; Wongratanaphisan, T. Energy efficiency in a 4-dof parallel robot featuring compliant elements. Int. J. Mech. Control 2019, 20, 1–9. [Google Scholar]
- Marchi, T.; Mottola, G.; Porta, J.M.; Thomas, F.; Carricato, M. Position and singularity analysis of a class of planar parallel manipulators with a reconfigurable end-effector. Machines 2021, 9, 7. [Google Scholar] [CrossRef]
- Llopis-Albert, C.; Rubio, F.; Valero, F. Optimization approaches for robot trajectory planning. Multidiscip. J. Educ. Soc. Technol. Sci. 2018, 5, 1–16. [Google Scholar] [CrossRef]
- Bordalba, R.; Porta, J.M.; Ros, L. A Singularity-Robust LQR Controller for Parallel Robots. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2018; pp. 5048–5054. [Google Scholar]
- Agarwal, A.; Nasa, C.; Bandyopadhyay, S. Dynamic singularity avoidance for parallel manipulators using a task-priority based control scheme. Mech. Mach. Theory 2016, 96, 107–126. [Google Scholar] [CrossRef]
- Lee, L.W.; Chiang, H.H.; Li, I.H. Development and control of a pneumatic-actuator 3-dof translational parallel manipulator with robot vision. Sensors 2019, 19, 1459. [Google Scholar] [CrossRef]
- Huynh, B.-P.; Su, S.-F.; Kuo, Y.-L. Vision/Position Hybrid Control for a Hexa Robot Using Bacterial Foraging Optimization in Real-time Pose Adjustment. Symmetry 2020, 12, 564. [Google Scholar] [CrossRef]
- Amarasinghe, D.; Mann GK, I.; Gosine, R.G. Vision-Based Hybrid Control Strategy for Autonomous Docking of a Mobile Robot; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2005; pp. 1600–1605. [Google Scholar]
- Araujo-Gómez, P.; Mata, V.; Díaz-Rodríguez, M.; Valera, A.; Page, A. Design and Kinematic Analysis of a Novel 3UPS/RPU Parallel Kinematic Mechanism With 2T2R Motion for Knee Diagnosis and Rehabilitation Tasks. J. Mech. Robot. 2017, 9, 061004. [Google Scholar] [CrossRef]
- Vallés, M.; Araujo-Gómez, P.; Mata, V.; Valera, A.; Díaz-Rodríguez, M.; Page, Á.; Farhat, N.M. Mechatronic design, experimental setup, and control architecture design of a novel 4 DoF parallel manipulator. Mech. Based Des. Struct. Mach. 2018, 46, 425–439. [Google Scholar] [CrossRef]
- Valero, F.; Díaz-Rodríguez, M.; Vallés, M.; Besa, A.; Bernabéu, E.; Valera, Á. Reconfiguration of a parallel kinematic manipulator with 2T2R motions for avoiding singularities through minimizing actuator forces. Mechatronics 2020, 69, 102382. [Google Scholar] [CrossRef]
- Maruyama, Y.; Kato, S.; Azumi, T. Exploring the performance of ROS2. In Proceedings of the Proceedings of the 13th International Conference on Embedded Software, EMSOFT 2016, Pittsburgh, PA, USA, 1–7 October 2016; Association for Computing Machinery, Inc.: New York, NY, USA, 2016; pp. 1–10. [Google Scholar]
- Jiang, Z.; Gong, Y.; Zhai, J.; Wang, Y.P.; Liu, W.; Wu, H.; Jin, J. Message Passing Optimization in Robot Operating System. Int. J. Parallel Program. 2020, 48, 119–136. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.4 | 0.4 | 0.4 | 90 | 45 | 0.15 |
| 0.3 | 0.3 | 0.3 | 50 | 90 |
| Parameters | ||
|---|---|---|
| Variable | Description | Default |
| 0.01 | ||
| 0.01 | ||
| 0.015 | ||
| maximum feasible values for the actuators’ length in vector | ||
| minimum feasible values for the actuators’ length in vector | ||
| experimental limits for the spherical joints, vector | ||
| See equation (10) | ||
| , persistent variable | - | |
| Inputs | ||
| Variable | Description | Default |
| enable pin | - | |
| determinant of the forward Jacobian matrix, feedback signal | - | |
| column vector with the six indices, feedback signals | - | |
| position and orientation of the mobile platform, feedback signal | - | |
| trajectory for the actuators, reference signal | - | |
| Outputs | ||
| Variable | Description | Default |
| trajectory for the actuators, desired signal | - | |
| Trajectory | Description | Type II Singularity | |||
|---|---|---|---|---|---|
| (rad) | (rad) | ||||
| 1 | Hip flexion | 0.01 | 0.70 | 0.15 | 0.31 |
| 2 | Partial internal–external knee rotation | 0.01 | 0.70 | −0.02 | 0.14 |
| 3 | Flexion–extension of the knee combined with ankle and knee rotations | 0.05 | 0.72 | −0.01 | 0.15 |
| 4 | Flexion–extension of the knee combined with hip flexion | 0.12 | 0.77 | −0.06 | 0.11 |
| 5 | Complete internal–external knee rotation | −0.05 | 0.73 | 0.10 | 0.33 |
| Trajectory | MAE (mm) | MAPE (%) | MDSR (mm) | |||
|---|---|---|---|---|---|---|
| SRM-V1 | SRM-V2 | SRM-V1 | SRM-V2 | SRM-V1 | SRM-V2 | |
| 1 | 3.87 | 10.74 | 0.53 | 1.40 | 7.01 | 18.18 |
| 2 | 1.09 | 2.04 | 0.14 | 0.28 | 5.05 | 2.92 |
| 3 | 1.77 | 6.15 | 0.24 | 0.82 | 4.78 | 6.74 |
| 4 | 3.00 | 10.24 | 0.38 | 1.25 | 7.48 | 10.81 |
| 5 | 10.74 | 10.44 | 1.43 | 1.37 | 15.47 | 35.23 |
| MEAN | 4.09 | 7.92 | 0.54 | 1.02 | 7.95 | 14.77 |
| Trajectory | MAE (mm) | MAPE (%) | MDSR (mm) | AVR (N) |
|---|---|---|---|---|
| 1 | 3.26 | 0.45 | 3.64 | 0.22 |
| 2 | 3.02 | 0.41 | 7.61 | 0.52 |
| 3 | 2.05 | 0.27 | 1.60 | 0.17 |
| 4 | 2.14 | 0.27 | 1.90 | 0.46 |
| 5 | 10.66 | 1.42 | 11.82 | 1.44 |
| MEAN | 4.22 | 0.56 | 5.31 | 0.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pulloquinga, J.L.; Escarabajal, R.J.; Ferrándiz, J.; Vallés, M.; Mata, V.; Urízar, M. Vision-Based Hybrid Controller to Release a 4-DOF Parallel Robot from a Type II Singularity. Sensors 2021, 21, 4080. https://doi.org/10.3390/s21124080
Pulloquinga JL, Escarabajal RJ, Ferrándiz J, Vallés M, Mata V, Urízar M. Vision-Based Hybrid Controller to Release a 4-DOF Parallel Robot from a Type II Singularity. Sensors. 2021; 21(12):4080. https://doi.org/10.3390/s21124080
Chicago/Turabian StylePulloquinga, José L., Rafael J. Escarabajal, Jesús Ferrándiz, Marina Vallés, Vicente Mata, and Mónica Urízar. 2021. "Vision-Based Hybrid Controller to Release a 4-DOF Parallel Robot from a Type II Singularity" Sensors 21, no. 12: 4080. https://doi.org/10.3390/s21124080
APA StylePulloquinga, J. L., Escarabajal, R. J., Ferrándiz, J., Vallés, M., Mata, V., & Urízar, M. (2021). Vision-Based Hybrid Controller to Release a 4-DOF Parallel Robot from a Type II Singularity. Sensors, 21(12), 4080. https://doi.org/10.3390/s21124080