
Analysis of Postural Instability in the Upright Position on Narrow Platforms and the Interactions with Postural Constraints


Abstract
1. Introduction
2. Materials and Methods
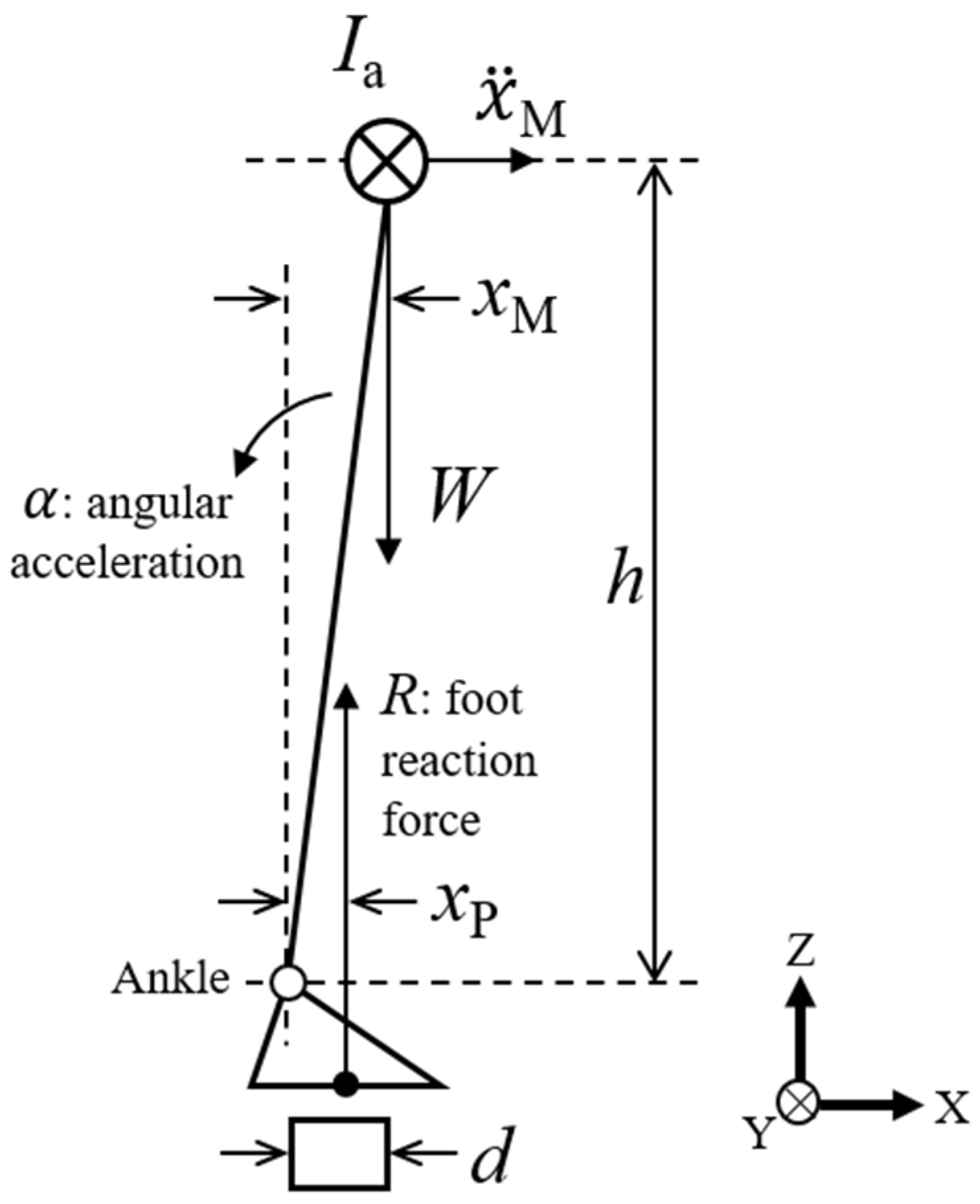
2.1. Inverted Pendulum Model and the Extension to Cases on Restricted Platforms
2.2. Participants
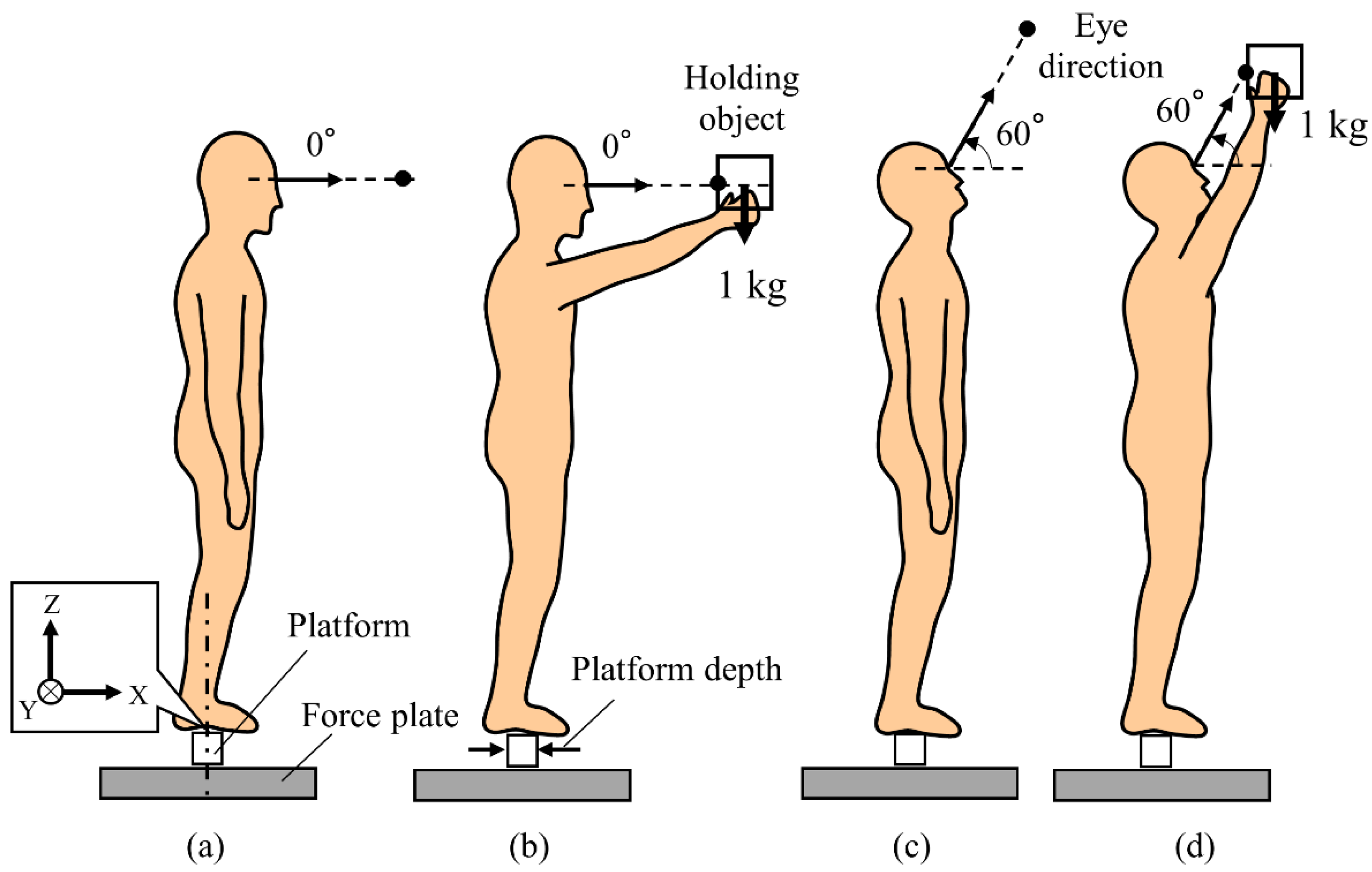
2.3. Experimental Apparatus and Procedure
2.4. Measurements and Analysis
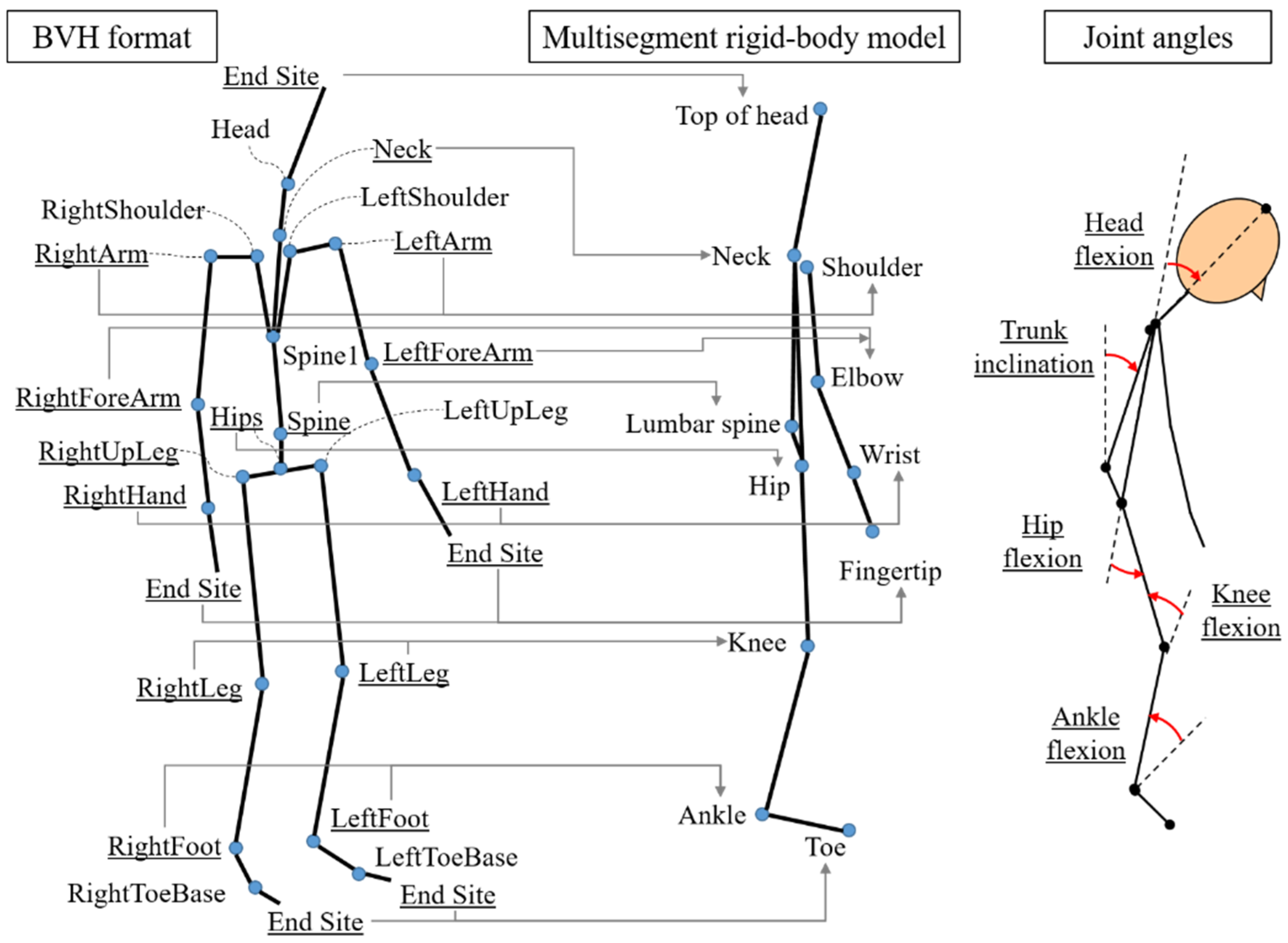
2.4.1. Kinematic Analysis
2.4.2. Body Posture
2.4.3. Subjective Sense of Instability
2.5. Statistical Analysis and Function Approximation
3. Results
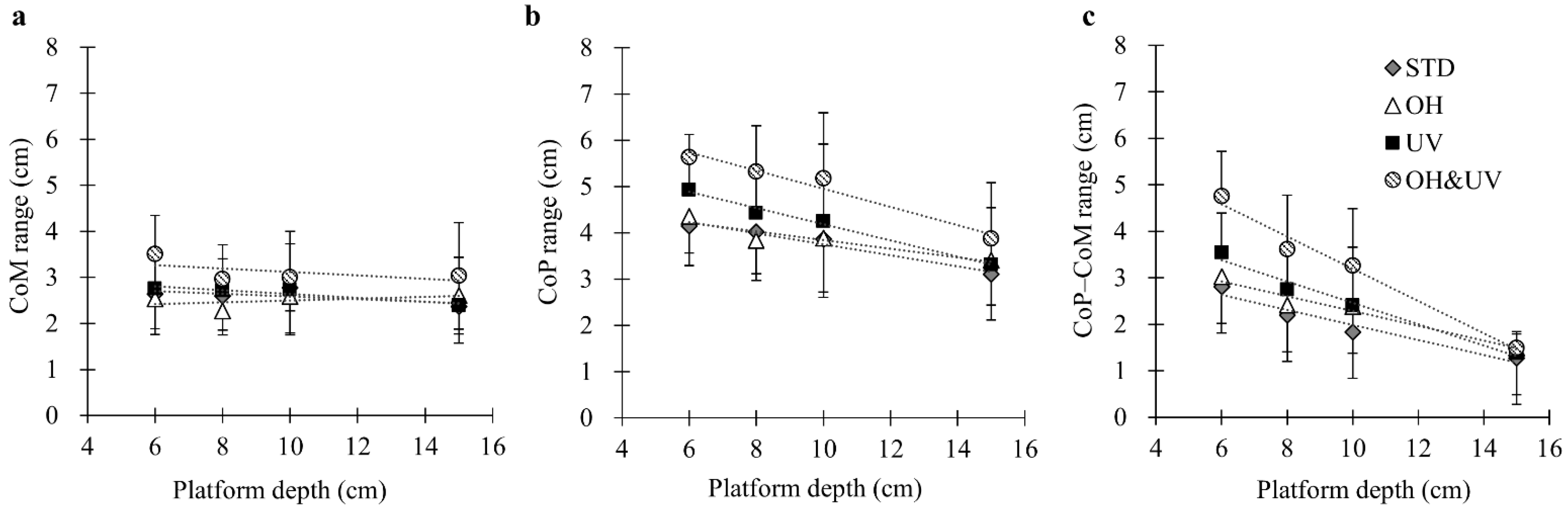
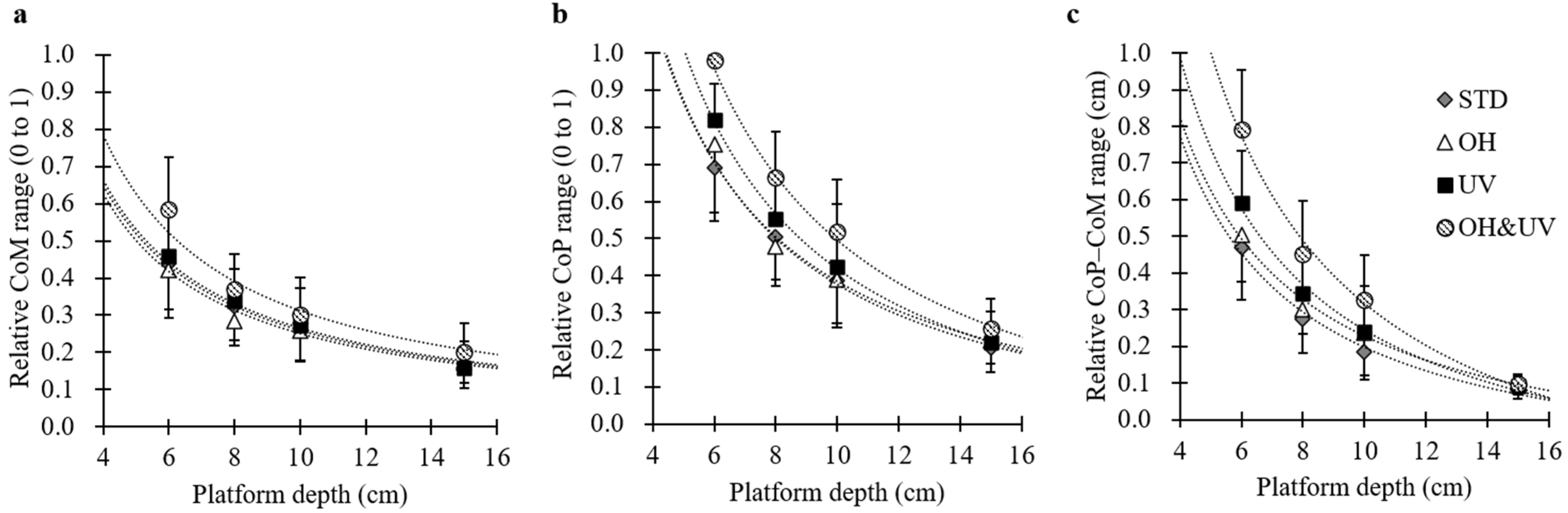
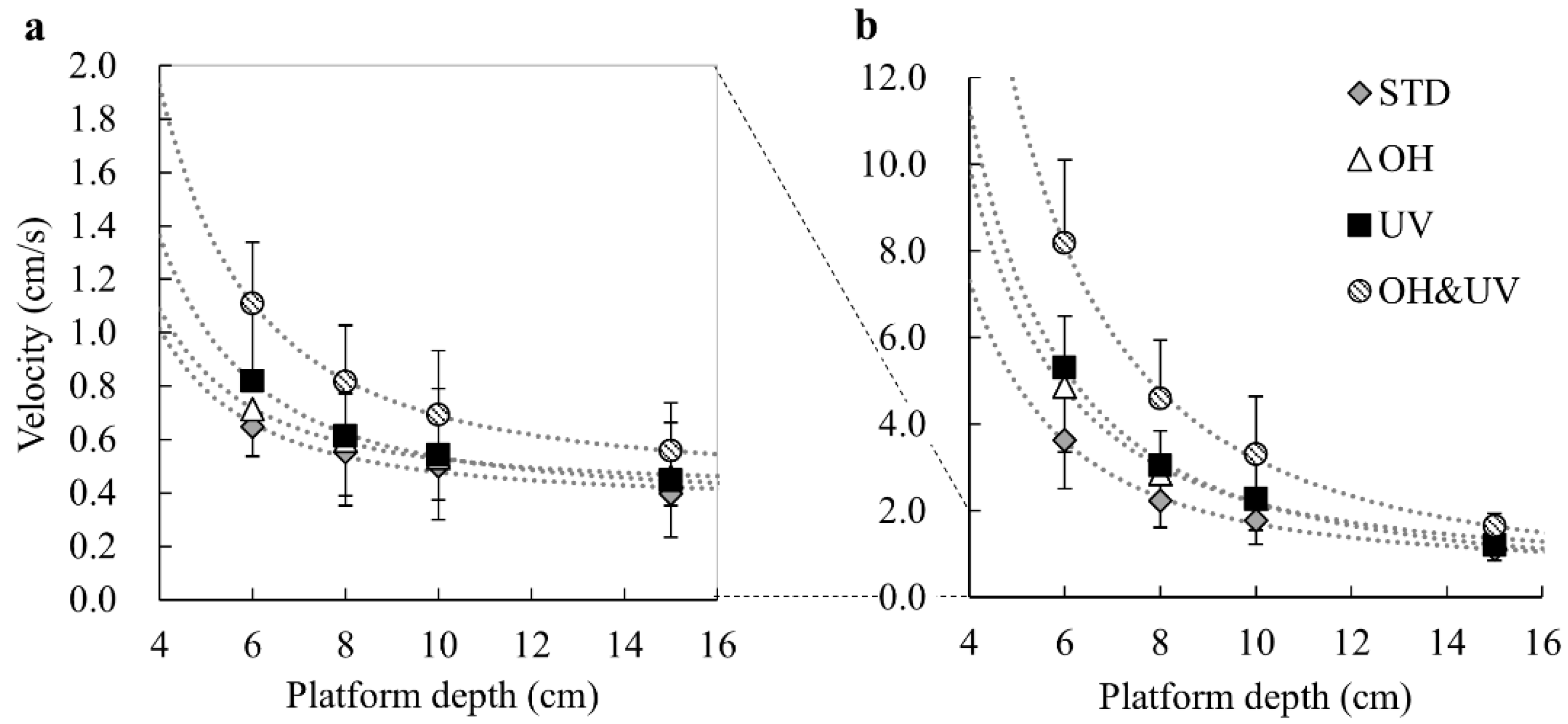
3.1. Kinematic Indices
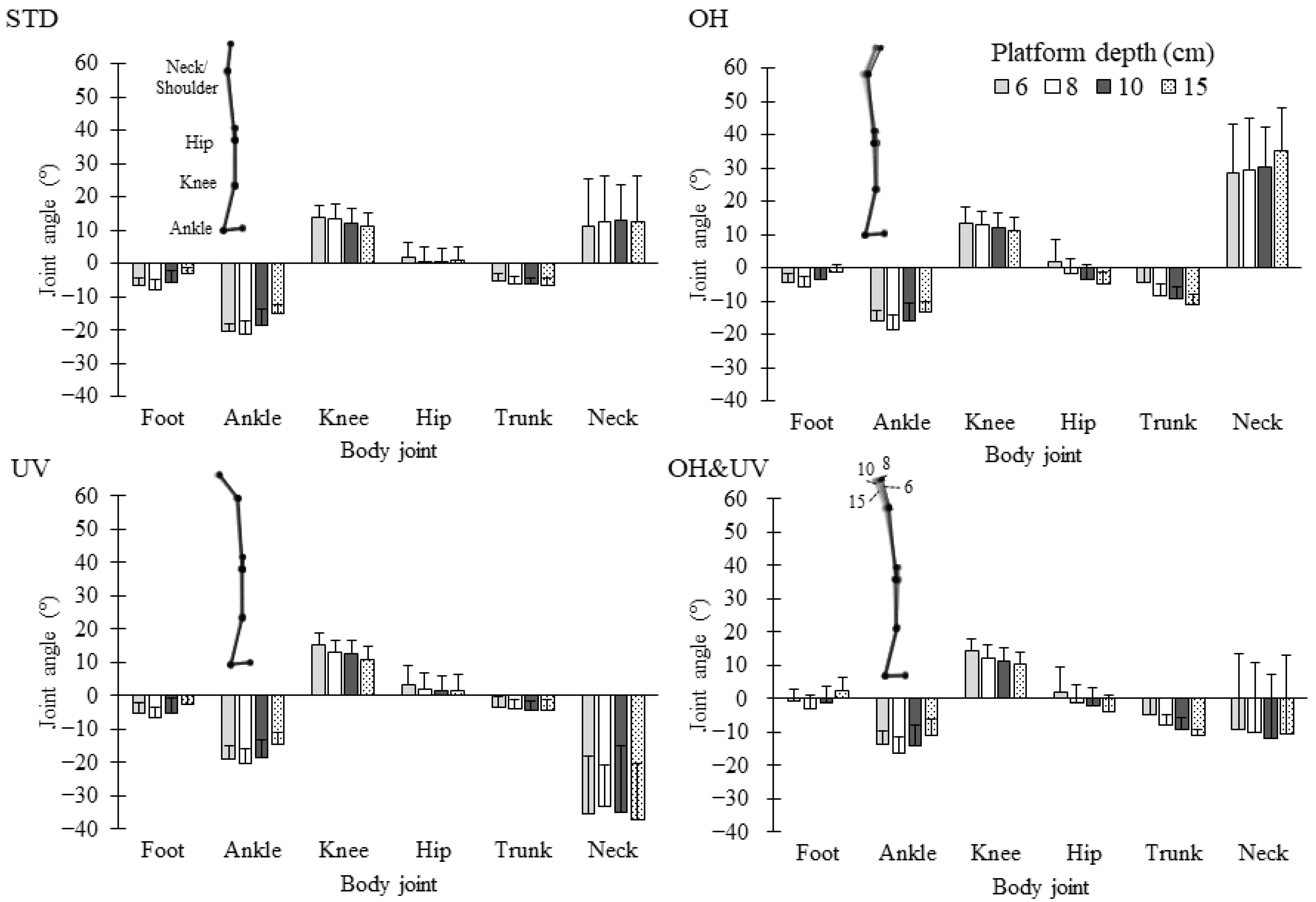
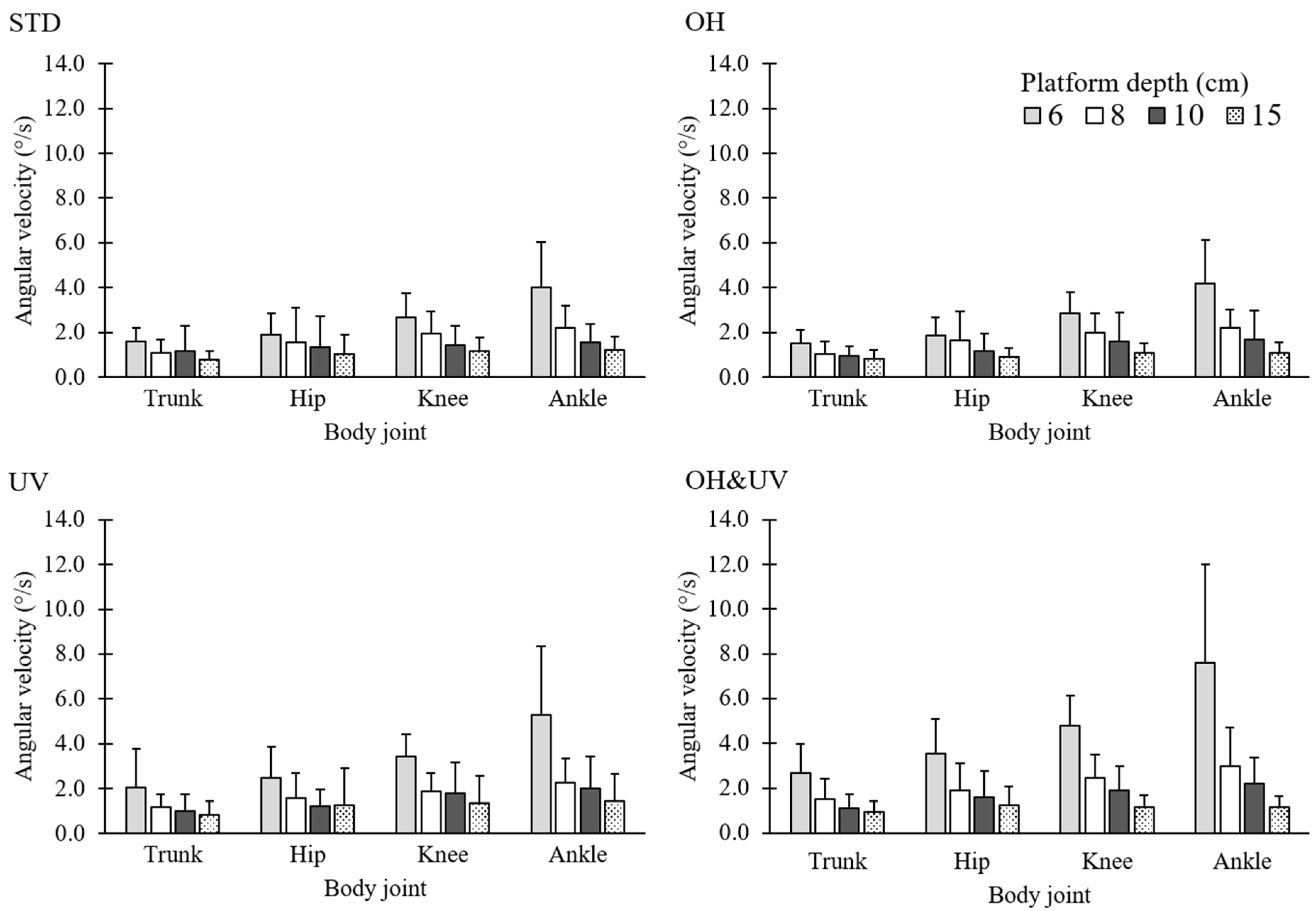
3.2. Body Posture
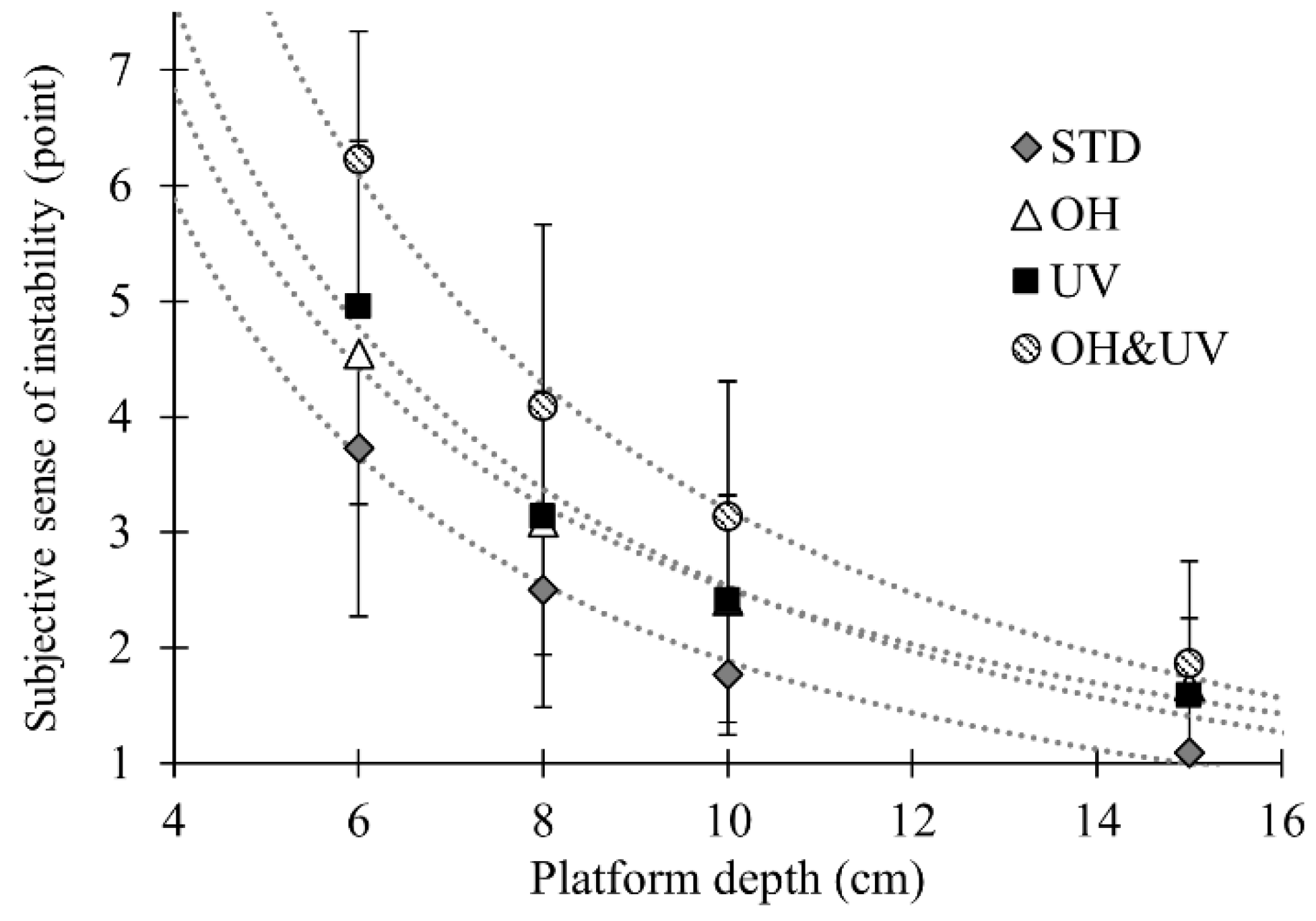
3.3. Subjective Sense of Instability
4. Discussion
4.1. Movements of CoM and CoP on Narrow Platforms
4.2. Postural Adjustments and Control
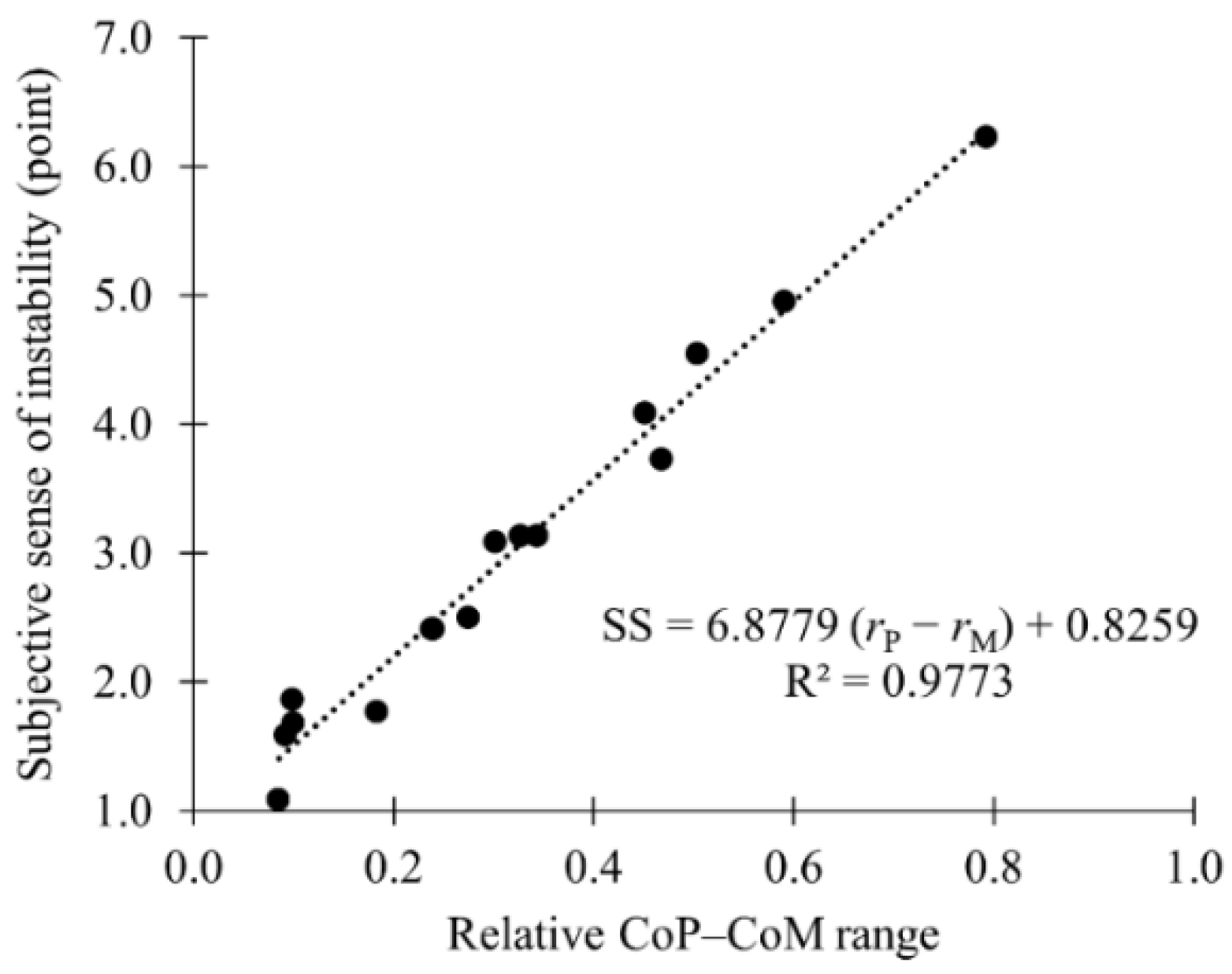
4.3. Sensing and Evaluation of Postural Stability
4.4. Application to Work Environments and the Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Supplemental Data for the Approximate Function

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Absolute Range of CoM | Absolute Range of CoP | Absolute Range of CoP–CoM | |||||||
| Factor: DoF | F Value | Significance | Multiple Comparison | F Value | Significance | Multiple Comparison | F Value | Significance | Multiple Comparison |
| Platform depth: F (3, 30) | 1.30 | n.s. | 20.96 | ** | 6 cm > 10, 15 cm; 15 cm < 8, 10 cm | 73.50 | ** | ** for all pairs except for an 8–10 cm pair | |
| Working posture: F (3, 30) | 10.47 | ** | OH&UV > STD, OH, and UV | 29.54 | ** | STD < UV, OH&UV; OH&UV > OH and UV | 29.34 | ** | STD < UV, OH&UV; OH&UV > STD, OH, and UV |
| Platform depth × Working posture: F (9, 90) | 1.20 | n.s. | 1.02 | n.s. | 4.33 | ** under the adjusted DoF: F (3.88, 38.75) | Effects of working posture: n.s. for 15-cm depth, and ** for other depths | ||
| Platform depth: F (3, 30) | 191.06 | ** under the adjusted DoF: F (1.78, 17.76) | ** for all pairs | 367.00 | ** | ** for all pairs | 278.85 | ** | ** for all pairs |
| Working posture: F (3, 30) | 11.29 | ** | OH&UV > STD, OH, and UV | 36.25 | ** | ** for all pairs except for an STD–OH pair | 31.46 | ** | STD < UV; OH&UV > STD, OH, and UV |
| Platform depth × Working posture: F (9, 90) | 2.52 | ** | Effects of working posture: n.s. for 10- and 15-cm depths, and ** for 6- and 8-cm depths | 3.04 | ** | Effects of working posture: n.s. for 15-cm depth, and ** for other depths | 6.98 | ** under the adjusted DoF: F (3.88, 38.75) | Effects of working posture: n.s. for 15-cm depth, and ** for other depths |
| Translational Velocity of CoM | Translational Velocity of CoP | Subjective Sense of Instability | |||||||
| Factor: DoF | F Value | Significance | Multiple Comparison | F Value | Significance | Multiple Comparison | F Value | Significance | Multiple Comparison |
| Platform depth: F (3, 30) | 64.95 | ** under the adjusted DoF: F (1.77, 17.68) | ** for all pairs | 110.35 | ** | ** for all pairs | 74.66 | ** | ** for all pairs |
| Working posture: F (3, 30) | 44.14 | ** | STD < UV; OH&UV > STD, OH, and UV | 76.98 | ** | ** for all pairs except for an OH–UV pair | 34.14 | ** | ** for all pairs except for an OH–UV pair |
| Platform depth × Working posture: F (9, 90) | 3.32 | ** | Effects of working posture: in 15-cm depth, ** only for an STD-OH&UV pair | 15.74 | ** | Effects of working posture: n.s. for 15-cm depth, and ** for other depths | 4.32 | ** | Effects of working posture: * for 15-cm depth, and ** for other depths |
| Absolute Range of CoM | Absolute Range of CoP | Absolute Range of CoP–CoM | ||||||||||
| STD | OH | UV | OH&UV | STD | OH | UV | OH&UV | STD | OH | UV | OH&UV | |
| a | −0.029 | −0.020 | −0.042 | −0.037 | −0.119 | −0.067 | −0.174 | −0.197 | −0.161 | −0.160 | −0.230 | −0.347 |
| b | 2.875 | 2.306 | 3.053 | 3.482 | 4.949 | 4.203 | 5.925 | 6.930 | 3.601 | 3.882 | 4.759 | 6.667 |
| Adjusted R2 for raw data | 0.001 | 0.009 | 0.010 | 0.007 | 0.133 | 0.023 | 0.191 | 0.260 | 0.359 | 0.312 | 0.415 | 0.578 |
| Significance of regression model (F value) | n.s. (1.12) | n.s. (0.74) | n.s. (1.91) | n.s. (1.65) | ** (13.0) | n.s. (1.93) | ** (21.53) | ** (30.54) | ** (49.66) | ** (40.42) | ** (51.94) | ** (117.49) |
| a | 2.746 | 2.407 | 2.966 | 3.793 | 4.822 | 4.607 | 5.956 | 6.737 | 3.842 | 3.969 | 4.964 | 6.850 |
| b | −0.015 | −0.009 | −0.032 | −0.070 | −0.106 | −0.081 | −0.177 | −0.177 | −0.187 | −0.169 | −0.252 | −0.368 |
| Adjusted R2 for raw data | 0.485 | 0.549 | 0.535 | 0.653 | 0.689 | 0.635 | 0.765 | 0.828 | 0.689 | 0.704 | 0.724 | 0.799 |
| Significance of regression model (F value) | ** (82.92) | ** (106.93) | ** (101.15) | ** (164.80) | ** (191.72) | ** (152.39) | ** (284.55) | ** (405.64) | ** (194.77) | ** (208.01) | ** (226.78) | ** (338.92) |
| Translational Velocity of CoM | Translational Velocity of CoP | Subjective Sense of Instability | ||||||||||
| STD | OH | UV | OH&UV | STD | OH | UV | OH&UV | STD | OH | UV | OH&UV | |
| a | 2.466 | 10.669 | 15.784 | 10.669 | 106.85 | 145.85 | 173.58 | 280.93 | 26.65 | 28.75 | 33.65 | 43.51 |
| b | 0.241 | 0.421 | 0.376 | 0.421 | 0.637 | 0.725 | 0.450 | 0.373 | −0.781 | −0.362 | −0.833 | −1.156 |
| Adjusted R2 for raw data | 0.212 | 0.237 | 0.261 | 0.237 | 0.637 | 0.658 | 0.760 | 0.755 | 0.524 | 0.495 | 0.573 | 0.637 |
| Significance of regression model (F value) | ** (24.37) | ** (27.99) | ** (31.74) | ** (27.99) | ** (151.60) | ** (166.10) | ** (277.12) | ** (260.65) | ** (96.57) | ** (86.19) | ** (117.51) | ** (153.42) |
References
- Vigneshkumar, C.; Salve, U.R. A scientometric analysis and review of fall from height research in construction. Constr. Econ. Build. 2020, 20, 17–35. [Google Scholar] [CrossRef]
- Nadhim, E.; Hon, C.; Xia, B.; Stewart, I.; Fang, D. Falls from height in the construction industry: A critical review of the scientific literature. Int. J. Environ. Res. Public Health 2016, 13, 638. [Google Scholar] [CrossRef] [PubMed]
- Bureau of Labor Statistics. National Census of Fatal Occupational Injuries in 2019; US Department of Labor: Washington, DC, USA, 2020; pp. 1–10.
- Ministry of Health, Labour and Welfare. Industrial Accidents Statistics in Japan. Available online: https://anzeninfo.mhlw.go.jp/index.html (accessed on 4 June 2021).
- Smith, G.S.; Timmons, R.A.; Lombardi, D.A.; Mamidi, D.K.; Matz, S.; Courtney, T.K.; Perry, M.J. Work-related ladder fall fractures: Identification and diagnosis validation using narrative text. Accid. Anal. Prev. 2006, 38, 973–980. [Google Scholar] [CrossRef] [PubMed]
- Nosaka, N.; Goda, Y.; Knaup, E.; Tsukahara, K.; Yumoto, T.; Ugawa, T.; Ujike, Y. Characteristics and costs of ladder fall injuries: A report from a single emergency center in Okayama. Acta Med. Okayama 2015, 69, 275–278. [Google Scholar] [CrossRef]
- Simeonov, P. Ladder Safety: Research, Control, and Practice. In Fall Prevention and Protection: Principles, Guidelines, and Practices; Hsiao, H., Ed.; CRC Press: Boca Raton, FL, USA, 2016; pp. 241–269. ISBN 9781482217148. [Google Scholar]
- Cohen, H.H.; Lin, L. A scenario analysis of ladder fall accidents. J. Safety Res. 1991, 22, 31–39. [Google Scholar] [CrossRef]
- Axelsson, P.O.; Carter, N. Measures to prevent portable ladder accidents in the construction industry. Ergonomics 1995, 38, 250–259. [Google Scholar] [CrossRef] [PubMed]
- Faergemann, C.; Larsen, L.B. Non-occupational ladder and scaffold fall injuries. Accid. Anal. Prev. 2000, 32, 745–750. [Google Scholar] [CrossRef]
- Sugama, A.; Ohnishi, A. Occupational accidents due to stepladders in Japan: Analysis of industry and injured characteristics. Procedia Manuf. 2015, 3, 6632–6638. [Google Scholar] [CrossRef]
- D’Souza, A.L.; Smith, G.A.; Trifiletti, L.B. Ladder-related injuries treated in emergency departments in the United States, 1990–2005. Am. J. Prev. Med. 2007, 32, 413–418. [Google Scholar] [CrossRef]
- Zampogna, A.; Mileti, I.; Palermo, E.; Celletti, C.; Paoloni, M.; Manoni, A.; Mazzetta, I.; Costa, G.D.; Pérez-López, C.; Camerota, F.; et al. Fifteen years of wireless sensors for balance assessment in neurological disorders. Sensors 2020, 20, 3247. [Google Scholar] [CrossRef]
- Huang, X.; Hinze, J. Analysis of construction worker fall accidents. J. Constr. Eng. Manag. 2003, 129, 262–271. [Google Scholar] [CrossRef]
- Redfern, M.S.; Moore, P.L.; Yarsky, C.M. The influence of flooring on standing balance among older persons. Hum. Factors J. Hum. Factors Ergon. Soc. 1997, 39, 445–455. [Google Scholar] [CrossRef] [PubMed]
- Simeonov, P.; Hsiao, H. Height, surface firmness, and visual reference effects on balance control. Inj. Prev. 2001, 7, 50–53. [Google Scholar] [CrossRef]
- DiDomenico, A.; Gielo-Perczak, K.; McGorry, R.W.; Chang, C.-C. Effects of simulated occupational task parameters on balance. Appl. Ergon. 2010, 41, 484–489. [Google Scholar] [CrossRef] [PubMed]
- Schiffman, J.M.; Bensel, C.K.; Hasselquist, L.; Gregorczyk, K.N.; Piscitelle, L. Effects of carried weight on random motion and traditional measures of postural sway. Appl. Ergon. 2006, 37, 607–614. [Google Scholar] [CrossRef] [PubMed]
- Hsiao, H.; Simeonov, P. Preventing falls from roofs: A critical review. Ergonomics 2001, 44, 537–561. [Google Scholar] [CrossRef]
- Santos, M.J.; Kanekar, N.; Aruin, A.S. The role of anticipatory postural adjustments in compensatory control of posture: 2. Biomechanical analysis. J. Electromyogr. Kinesiol. 2010, 20, 398–405. [Google Scholar] [CrossRef]
- Sugama, A.; Seo, A. Postural Stability of Static Standing on Narrow Platform for Stepladder Safety. Jpn. J. Ergon. 2017, 53, 125–132. [Google Scholar] [CrossRef]
- Horak, F.; Kuo, A. Postural Adaptation for Altered Environments, Tasks, and Intentions. Biomech. Neural Control Posture Mov. 2000, 267–281. [Google Scholar] [CrossRef]
- Dutt-Mazumder, A.; Challis, J.; Newell, K. Maintenance of postural stability as a function of tilted base of support. Hum. Mov. Sci. 2016, 48, 91–101. [Google Scholar] [CrossRef]
- Shumway-Cook, A.; Woollacott, M.H. Motor Control: Translating Research into Clinical Practice, 4th ed.; Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2013; ISBN 9781496302632. [Google Scholar]
- Chiou, S.; Bhattacharya, A.; Lai, C.-F.; Succop, P.A. Effect of environmental and task risk factors on workers’ perceived sense of postural sway and instability. Occup. Ergon. 1998, 1, 81–93. [Google Scholar] [CrossRef]
- Tucker, M.G.; Kavanagh, J.J.; Barrett, R.S.; Morrison, S. Age-related differences in postural reaction time and coordination during voluntary sway movements. Hum. Mov. Sci. 2008, 27, 728–737. [Google Scholar] [CrossRef] [PubMed]
- Mileti, I.; Taborri, J.; Rossi, S.; Del Prete, Z.; Paoloni, M.; Suppa, A.; Palermo, E. Reactive postural responses to continuous yaw perturbations in healthy humans: The effect of aging. Sensors 2020, 20, 63. [Google Scholar] [CrossRef]
- Simeonov, P.; Hsiao, H.; Powers, J.; Ammons, D.; Amendola, A.; Kau, T.-Y.; Cantis, D. Footwear effects on walking balance at elevation. Ergonomics 2008, 51, 1885–1905. [Google Scholar] [CrossRef]
- Lee, T.-H.; Lee, Y.-H. An investigation of stability limits while holding a load. Ergonomics 2003, 46, 446–454. [Google Scholar] [CrossRef]
- Aruin, A.S.; Forrest, W.R.; Latash, M.L. Anticipatory postural adjustments in conditions of postural instability. Electroencephalogr. Clin. Neurophysiol. Mot. Control 1998, 109, 350–359. [Google Scholar] [CrossRef]
- DiDomenico, A.; Nussbaum, M.A. Interactive effects of mental and postural demands on subjective assessment of mental workload and postural stability. Saf. Sci. 2005, 43, 485–495. [Google Scholar] [CrossRef]
- Varas-Diaz, G.; Kannan, L.; Bhatt, T. Effect of mental fatigue on postural sway in healthy older adults and stroke populations. Brain Sci. 2020, 10, 388. [Google Scholar] [CrossRef] [PubMed]
- Winter, D.A.; Patla, A.E.; Prince, F.; Ishac, M.; Gielo-Perczak, K. Stiffness control of balance in quiet standing. J. Neurophysiol. 1998, 80, 1211–1221. [Google Scholar] [CrossRef] [PubMed]
- ISO. Basic Human Body Measurements for Technological Design, Body Measurement Definitions and Landmarks; ISO 7250-1; International Organization for Standardization: Geneva, Switzerland, 2017. [Google Scholar]
- JIS. Protective Footwear; JIS T 8101; Japanese Standards Association: Tokyo, Japan, 2020. [Google Scholar]
- Yang, F.; Gao, Y.; Ma, R.; Zojaji, S.; Castellano, G.; Peters, C. A dataset of human and robot approach behaviors into small free-standing conversational groups. PLoS ONE 2021, 16, e0247364. [Google Scholar] [CrossRef]
- BS. BS EN 131-1:2007+A1 Ladders—Part 1: Terms, Types, Functional Sizes; British Standards: London, UK, 2011; Volume 3. [Google Scholar]
- ANSI. A14.2 Portable Metal Ladders-2017; American National Standards Institute: Washington, DC, USA, 2017. [Google Scholar]
- JIS. Aluminium Ladder and Stepladder; JIS S 1121; Japanese Standards Association: Tokyo, Japan, 2013. [Google Scholar]
- Ferdjallah, M.; Harris, G.F.; Smith, P.; Wertsch, J.J. Analysis of postural control synergies during quiet standing in healthy children and children with cerebral palsy. Clin. Biomech. 2002, 17, 203–210. [Google Scholar] [CrossRef]
- Hsiao, H.; Simeonov, P.; Dotson, B.; Ammons, D.; Kau, T.-Y.; Chiou, S. Human responses to augmented virtual scaffolding models. Ergonomics 2005, 48, 1223–1242. [Google Scholar] [CrossRef]
- Qu, X.; Nussbaum, M.A. Effects of external loads on balance control during upright stance: Experimental results and model-based predictions. Gait Posture 2009, 29, 23–30. [Google Scholar] [CrossRef] [PubMed]
- Holbein, M.A.; Chaffin, D.B. Stability limits in extreme postures: Effects of load positioning, foot placement, and strength. Hum. Factors J. Hum. Factors Ergon. Soc. 1997, 39, 456–468. [Google Scholar] [CrossRef] [PubMed]
- Krishnamoorthy, V.; Yang, J.F.; Scholz, J.P. Joint coordination during quiet stance: Effects of vision. Exp. Brain Res. 2005, 164, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Chaffin, D.B.; Andersson, G.B.J.; Martin, B.J. Occupational Biomechanics, 4th ed.; Wiley: Hoboken, NJ, USA, 2006; ISBN 978-0-470-39818-0. [Google Scholar]
- Ae, M.; Tang, H.; Yokoi, T. Estimation of inertia properties of the body segments in Japanese athletes. Biomechanisms 1992, 11, 23–33. [Google Scholar] [CrossRef]
- Jacobs, J.V.; Horak, F.B. Cortical control of postural responses. J. Neural Transm. 2007, 114, 1339–1348. [Google Scholar] [CrossRef]
- Grace Gaerlan, M.; Alpert, P.T.; Cross, C.; Louis, M.; Kowalski, S. Postural balance in young adults: The role of visual, vestibular and somatosensory systems. J. Am. Acad. Nurse Pract. 2012, 24, 375–381. [Google Scholar] [CrossRef]
- Peterka, R.J. Sensorimotor Integration in Human Postural Control. J. Neurophysiol. 2002, 88, 1097–1118. [Google Scholar] [CrossRef] [PubMed]
- Horak, F.B.; Nashner, L.M. Central programming of postural movements: Adaptation to altered support-surface configurations. J. Neurophysiol. 1986, 55, 1369–1381. [Google Scholar] [CrossRef]
- Pai, Y.C.; Patton, J. Center of mass velocity-position predictions for balance control. J. Biomech. 1997, 30, 347–354. [Google Scholar] [CrossRef]
- Ghislieri, M.; Gastaldi, L.; Pastorelli, S.; Tadano, S.; Agostini, V. Wearable inertial sensors to assess standing balance: A systematic review. Sensors 2019, 19, 4075. [Google Scholar] [CrossRef] [PubMed]
- Ancillao, A.; Tedesco, S.; Barton, J.; O’flynn, B. Indirect measurement of ground reaction forces and moments by means of wearable inertial sensors: A systematic review. Sensors 2018, 18, 2564. [Google Scholar] [CrossRef] [PubMed]
- Simeonov, P.I.; Hsiao, H.; DotsonM, B.W.; Ammons, D.E. Height effects in real and virtual environments. Hum. Factors J. Hum. Factors Ergon. Soc. 2005, 47, 430–438. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sugama, A.; Seo, A. Analysis of Postural Instability in the Upright Position on Narrow Platforms and the Interactions with Postural Constraints. Sensors 2021, 21, 3909. https://doi.org/10.3390/s21113909
Sugama A, Seo A. Analysis of Postural Instability in the Upright Position on Narrow Platforms and the Interactions with Postural Constraints. Sensors. 2021; 21(11):3909. https://doi.org/10.3390/s21113909
Chicago/Turabian StyleSugama, Atsushi, and Akihiko Seo. 2021. "Analysis of Postural Instability in the Upright Position on Narrow Platforms and the Interactions with Postural Constraints" Sensors 21, no. 11: 3909. https://doi.org/10.3390/s21113909
APA StyleSugama, A., & Seo, A. (2021). Analysis of Postural Instability in the Upright Position on Narrow Platforms and the Interactions with Postural Constraints. Sensors, 21(11), 3909. https://doi.org/10.3390/s21113909