
High Accuracy WiFi-Based Human Activity Classification System with Time-Frequency Diagram CNN Method for Different Places


Abstract
1. Introduction
2. Related Work
2.1. Sensors Based Fall Detection
2.2. Image Based Fall Detection
2.3. Multiple Sensors Based Fall Detection
2.4. Wifi Based Fall Detection
3. Preliminaries
3.1. Received Signal Strength Indicator (RSSI)
3.2. Channel State Information (CSI)
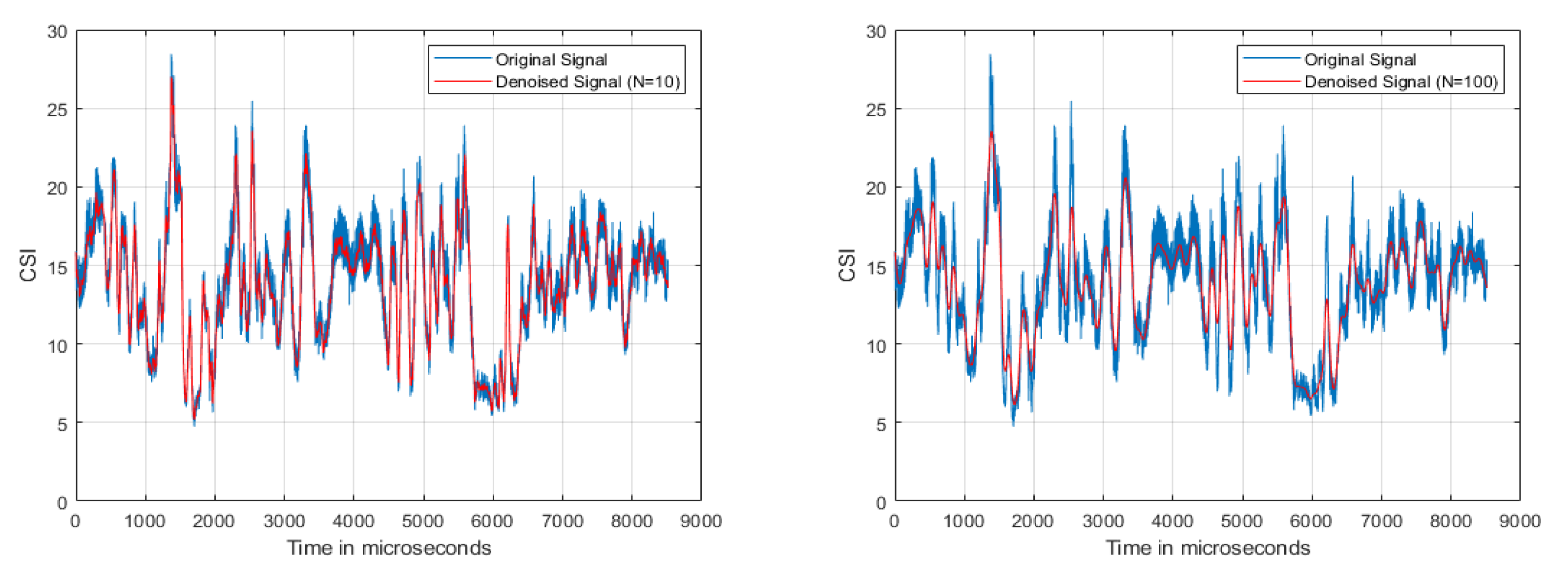
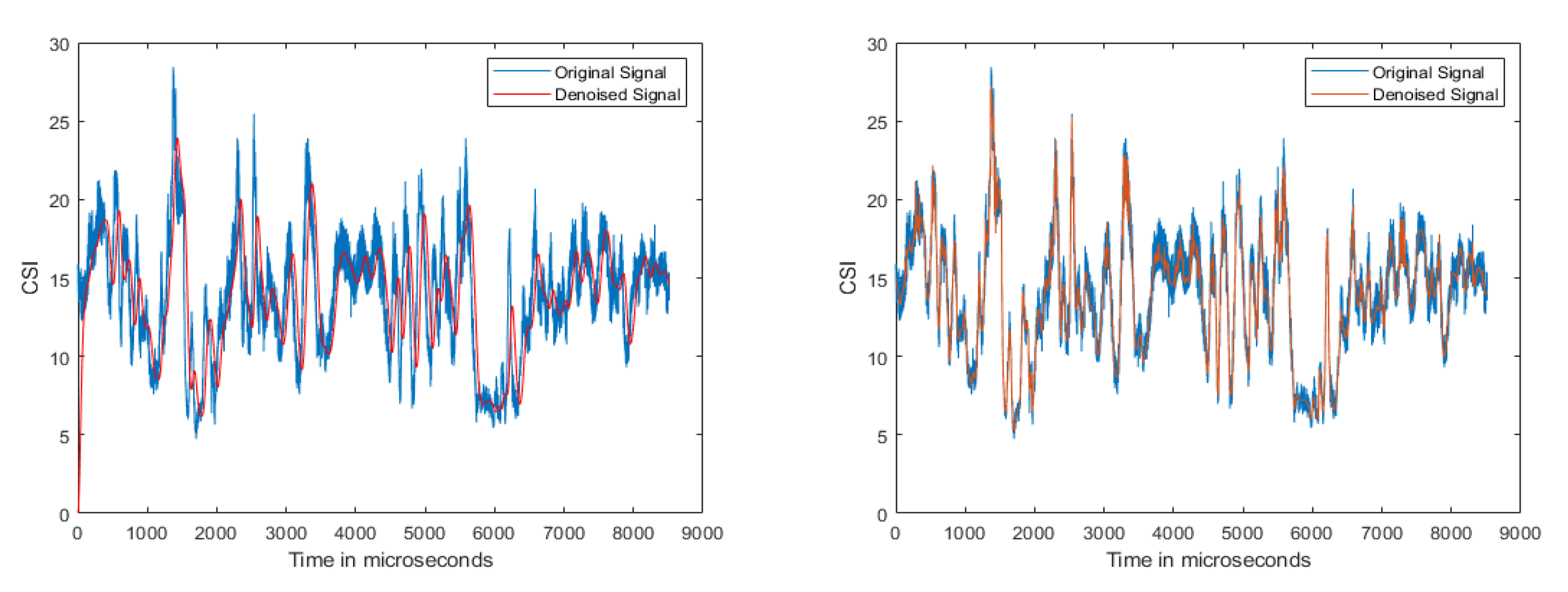
3.3. Denoising
3.4. GoogLeNet
3.5. NVIDIA DIGITS
3.6. Feature Extraction and Action Classification
4. The Four-Stage Proposed Mechanism
4.1. Stage Two: Denoising
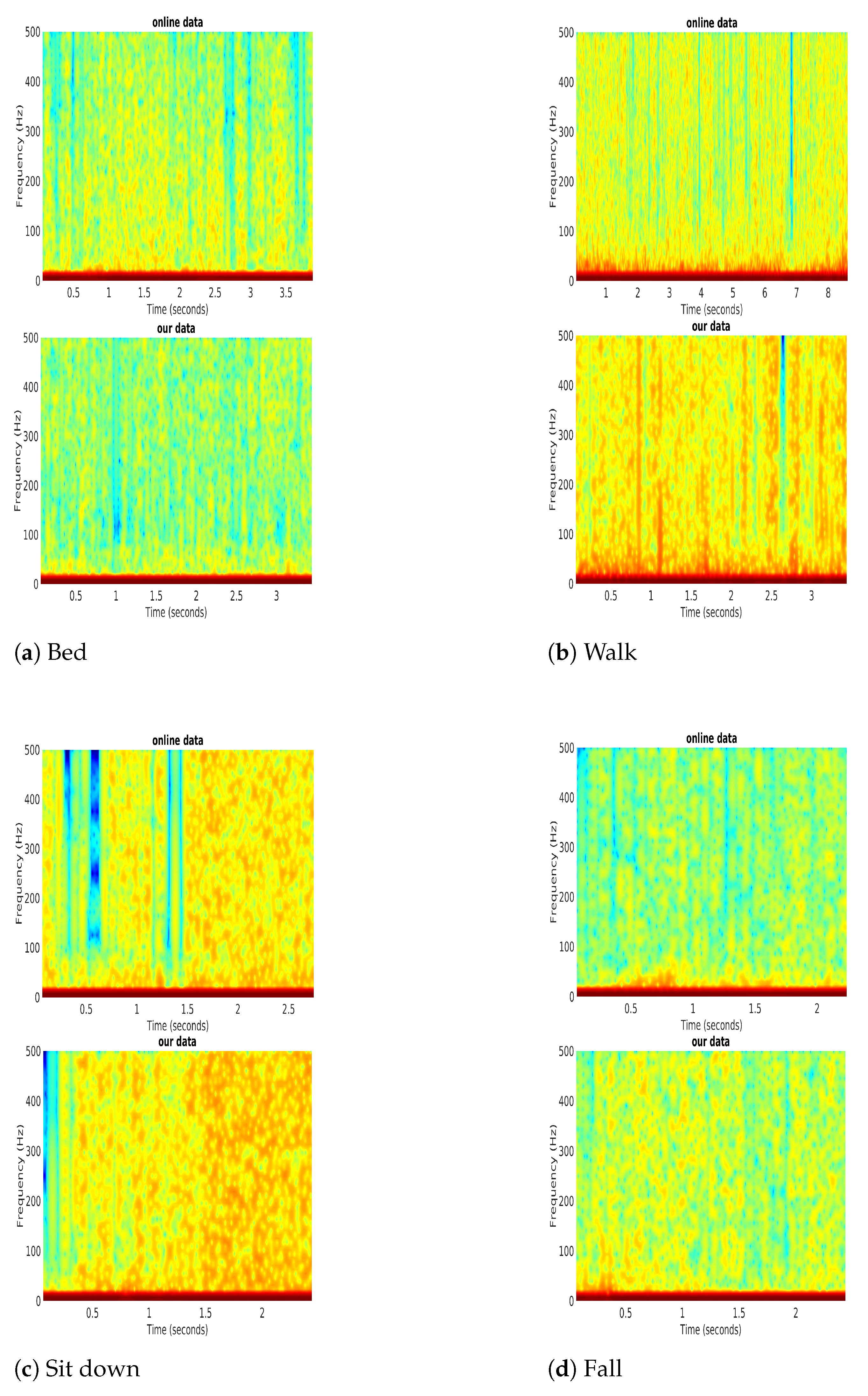
4.2. Stage Three: Short-Time Fourier Transform
4.3. Stage Four: GoogLeNet
5. Evaluation
5.1. Experiment Setup
5.2. Datasets
5.2.1. Denoising
5.2.2. Short-Time Fourier Transform
5.3. System Performance and Comparison
5.4. Test at the Same Place
5.5. Test at the Different Places
5.6. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- CDC. Important Facts about Falls. 2017. Available online: https://www.cdc.gov/homeandrecreationalsafety/falls/adultfalls.html (accessed on 2 March 2021).
- Bianchi, F.; Redmond, S.J.; Narayanan, M.R.; Cerutti, S.; Lovell, N.H. Barometric pressure and triaxial accelerometry-based falls event detection. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 619–627. [Google Scholar] [CrossRef]
- Selvabala, V.S.N.; Ganesh, A.B. Implementation of wireless sensor network based human fall detection system. Procedia Eng. 2012, 30, 767–773. [Google Scholar] [CrossRef]
- Foroughi, H.; Naseri, A.; Saberi, A.; Yazdi, H.S. An eigenspace-based approach for human fall detection using integrated time motion image and neural network. In Proceedings of the 2008 9th International Conference on Signal Processing, Beijing, China, 26–29 October 2008; pp. 1499–1503. [Google Scholar]
- Foroughi, H.; Aski, B.S.; Pourreza, H. Intelligent video surveillance for monitoring fall detection of elderly in home environments. In Proceedings of the 2008 11th international conference on computer and information technology, Khulna, Bangladesh, 24–27 December 2008; pp. 219–224. [Google Scholar]
- Fu, Z.; Culurciello, E.; Lichtsteiner, P.; Delbruck, T. Fall detection using an address-event temporal contrast vision sensor. In Proceedings of the 2008 IEEE International Symposium on Circuits and Systems, Seattle, WA, USA, 18–21 May 2008; pp. 424–427. [Google Scholar]
- Zhang, Z.; Conly, C.; Athitsos, V. A survey on vision-based fall detection. In Proceedings of the 8th ACM International Conference on PErvasive Technologies Related to Assistive Environments, Corfu, Greece, 1–3 July 2015; pp. 1–7. [Google Scholar]
- Dai, J.; Bai, X.; Yang, Z.; Shen, Z.; Xuan, D. PerFallD: A pervasive fall detection system using mobile phones. In Proceedings of the 2010 8th IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), Mannheim, Germany, 29 March–2 April 2010; pp. 292–297. [Google Scholar]
- Cao, Y.; Yang, Y.; Liu, W. E-FallD: A fall detection system using android-based smartphone. In Proceedings of the 2012 9th International Conference on Fuzzy Systems and Knowledge Discovery, Chongqing, China, 29–31 May 2012; pp. 1509–1513. [Google Scholar]
- Wang, X.; Ellul, J.; Azzopardi, G. Elderly fall detection systems: A literature survey. Front. Robot. AI 2020, 7, 71. [Google Scholar] [CrossRef]
- Igual, R.; Medrano, C.; Plaza, I. Challenges, issues and trends in fall detection systems. Biomed. Eng. Online 2013, 12, 1–24. [Google Scholar] [CrossRef]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool release: Gathering 802.11 n traces with channel state information. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 53. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, K.; Ni, L.M. Wifall: Device-free fall detection by wireless networks. IEEE Trans. Mob. Comput. 2016, 16, 581–594. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, H.; Wang, Y.; Ma, J. Anti-fall: A non-intrusive and real-time fall detector leveraging CSI from commodity WiFi devices. In Proceedings of the International Conference on Smart Homes and Health Telematics, Geneva, Switzerland, 10–12 June 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 181–193. [Google Scholar]
- Wang, H.; Zhang, D.; Wang, Y.; Ma, J.; Wang, Y.; Li, S. RT-Fall: A real-time and contactless fall detection system with commodity WiFi devices. IEEE Trans. Mob. Comput. 2016, 16, 511–526. [Google Scholar] [CrossRef]
- Yousefi, S.; Narui, H.; Dayal, S.; Ermon, S.; Valaee, S. A survey on behavior recognition using WiFi channel state information. IEEE Commun. Mag. 2017, 55, 98–104. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Understanding and modeling of wifi signal based human activity recognition. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 65–76. [Google Scholar]
- Chowdhury, T.Z.; Leung, C.; Miao, C.Y. WiHACS: Leveraging WiFi for human activity classification using OFDM subcarriers’ correlation. In Proceedings of the 2017 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Montreal, QC, Canada, 14–16 November 2017; pp. 338–342. [Google Scholar]
- Fang, S.H.; Li, C.C.; Lu, W.C.; Xu, Z.; Chien, Y.R. Enhanced device-free human detection: Efficient learning from phase and amplitude of channel state information. IEEE Trans. Veh. Technol. 2019, 68, 3048–3051. [Google Scholar] [CrossRef]
- Li, H.; Ota, K.; Dong, M.; Guo, M. Learning human activities through Wi-Fi channel state information with multiple access points. IEEE Commun. Mag. 2018, 56, 124–129. [Google Scholar] [CrossRef]
- Nandakumar, R.; Kellogg, B.; Gollakota, S. Wi-fi gesture recognition on existing devices. arXiv 2014, arXiv:1411.5394. [Google Scholar]
- Zhang, J.; Wei, B.; Hu, W.; Kanhere, S.S. Wifi-id: Human identification using wifi signal. In Proceedings of the 2016 International Conference on Distributed Computing in Sensor Systems (DCOSS), Washington, DC, USA, 26–28 May 2016; pp. 75–82. [Google Scholar]
- Zeng, Y.; Pathak, P.H.; Mohapatra, P. WiWho: WiFi-based person identification in smart spaces. In Proceedings of the 2016 15th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Vienna, Austria, 11–14 April 2016; pp. 1–12. [Google Scholar]
- Ali, K.; Liu, A.X.; Wang, W.; Shahzad, M. Keystroke recognition using wifi signals. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 90–102. [Google Scholar]
- Espinosa, R.; Ponce, H.; Gutiérrez, S.; Martínez-Villaseñor, L.; Brieva, J.; Moya-Albor, E. A vision-based approach for fall detection using multiple cameras and convolutional neural networks: A case study using the UP-Fall detection dataset. Comput. Biol. Med. 2019, 115, 103520. [Google Scholar] [CrossRef] [PubMed]
- Espinosa, R.; Ponce, H.; Gutiérrez, S.; Martínez-Villaseñor, L.; Brieva, J.; Moya-Albor, E. Application of Convolutional Neural Networks for Fall Detection Using Multiple Cameras. In Challenges and Trends in Multimodal Fall Detection for Healthcare; Springer: Berlin/Heidelberg, Germany, 2020; pp. 97–120. [Google Scholar]
- Diraco, G.; Leone, A.; Siciliano, P. An active vision system for fall detection and posture recognition in elderly healthcare. In Proceedings of the 2010 Design, Automation & Test in Europe Conference & Exhibition (DATE 2010), Dresden, Germany, 8–12 March 2010; pp. 1536–1541. [Google Scholar]
- Yang, L.; Ren, Y.; Zhang, W. 3D depth image analysis for indoor fall detection of elderly people. Digit. Commun. Netw. 2016, 2, 24–34. [Google Scholar] [CrossRef]
- Lu, N.; Wu, Y.; Feng, L.; Song, J. Deep learning for fall detection: Three-dimensional CNN combined with LSTM on video kinematic data. IEEE J. Biomed. Health Inform. 2018, 23, 314–323. [Google Scholar] [CrossRef]
- Solbach, M.D.; Tsotsos, J.K. Vision-based fallen person detection for the elderly. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Venice, Italy, 22–29 October 2017; pp. 1433–1442. [Google Scholar]
- Núñez-Marcos, A.; Azkune, G.; Arganda-Carreras, I. Vision-based fall detection with convolutional neural networks. Wirel. Commun. Mob. Comput. 2017, 2017, 9474806. [Google Scholar] [CrossRef]
- De Miguel, K.; Brunete, A.; Hernando, M.; Gambao, E. Home camera-based fall detection system for the elderly. Sensors 2017, 17, 2864. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000. Conference on Computer Communications. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No. 00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Al-Qaness, M.A.A.; Li, F.; Ma, X.; Zhang, Y.; Liu, G. Device-free indoor activity recognition system. Appl. Sci. 2016, 6, 329. [Google Scholar] [CrossRef]
- Pu, Q.; Gupta, S.; Gollakota, S.; Patel, S. Whole-home gesture recognition using wireless signals. In Proceedings of the 19th Annual International Conference on Mobile Computing & Networking, Miami, FL, USA, 30 Septemer–4 October 2013; pp. 27–38. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S. CSI phase fingerprinting for indoor localization with a deep learning approach. IEEE Internet Things J. 2016, 3, 1113–1123. [Google Scholar] [CrossRef]
- Ma, L.; Liu, M.; Wang, N.; Wang, L.; Yang, Y.; Wang, H. Room-level fall detection based on ultra-wideband (UWB) monostatic radar and convolutional long short-term memory (LSTM). Sensors 2020, 20, 1105. [Google Scholar] [CrossRef]
- Sadreazami, H.; Bolic, M.; Rajan, S. CapsFall: Fall detection using ultra-wideband radar and capsule network. IEEE Access 2019, 7, 55336–55343. [Google Scholar] [CrossRef]
- Mitic, P. Noise reduction in a reputation index. Int. J. Financ. Stud. 2018, 6, 19. [Google Scholar] [CrossRef]
- Rodriguez-Hernandez, M.A.; San Emeterio, J.L. Noise reduction using wavelet cycle spinning: Analysis of useful periodicities in the z-transform domain. Signal Image Video Process. 2016, 10, 519–526. [Google Scholar] [CrossRef]
- Yang, X.; Xiong, F.; Shao, Y.; Niu, Q. WmFall: WiFi-based multistage fall detection with channel state information. Int. J. Distrib. Sens. Netw. 2018, 14. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S. PhaseFi: Phase fingerprinting for indoor localization with a deep learning approach. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- NVIDIA DIGITS|NVIDIA Developer. Available online: https://developer.nvidia.com/digits (accessed on 5 March 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accuracy (%) | Bed | Fall | Walk | Sit Down | Average |
|---|---|---|---|---|---|
| Same Place | 95.6 | 94.4 | 98 | 84.7 | 93.2 |
| Different place | 91.6 | 90.3 | 97.5 | 81.8 | 90.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, L.; Chao, C.-H.; Wu, S.-L.; Li, M.-C. High Accuracy WiFi-Based Human Activity Classification System with Time-Frequency Diagram CNN Method for Different Places. Sensors 2021, 21, 3797. https://doi.org/10.3390/s21113797
Sharma L, Chao C-H, Wu S-L, Li M-C. High Accuracy WiFi-Based Human Activity Classification System with Time-Frequency Diagram CNN Method for Different Places. Sensors. 2021; 21(11):3797. https://doi.org/10.3390/s21113797
Chicago/Turabian StyleSharma, Lokesh, Chung-Hao Chao, Shih-Lin Wu, and Mei-Chen Li. 2021. "High Accuracy WiFi-Based Human Activity Classification System with Time-Frequency Diagram CNN Method for Different Places" Sensors 21, no. 11: 3797. https://doi.org/10.3390/s21113797
APA StyleSharma, L., Chao, C.-H., Wu, S.-L., & Li, M.-C. (2021). High Accuracy WiFi-Based Human Activity Classification System with Time-Frequency Diagram CNN Method for Different Places. Sensors, 21(11), 3797. https://doi.org/10.3390/s21113797