
Collision Avoidance and Stability Study of a Self-Reconfigurable Drainage Robot

 ,
,  ,
,
Abstract
1. Introduction
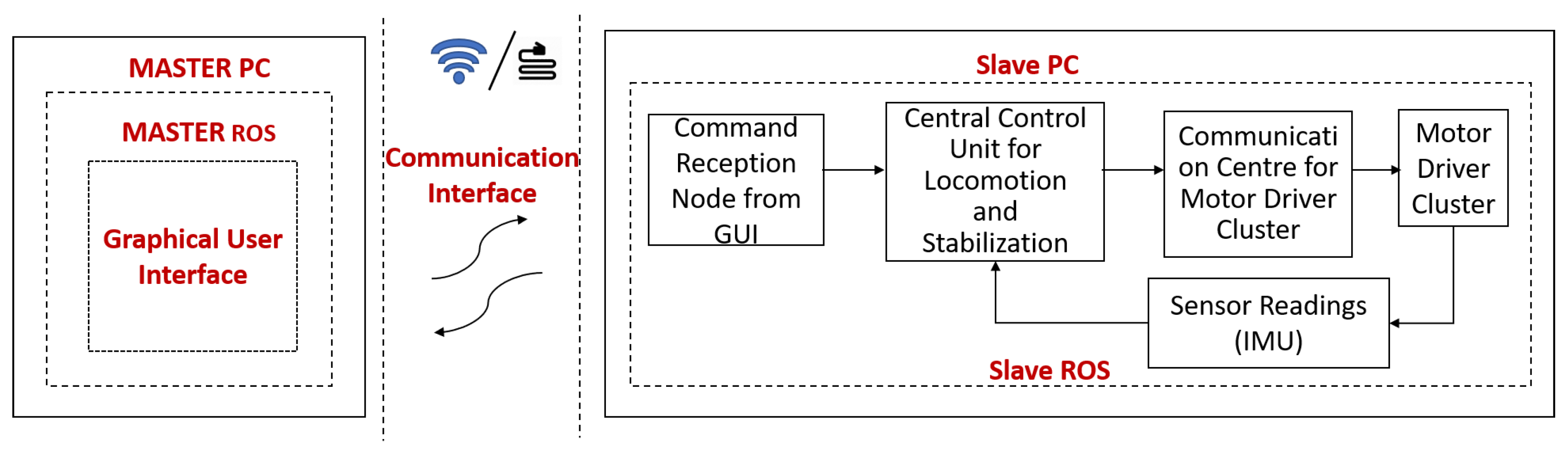
2. Platform Architecture
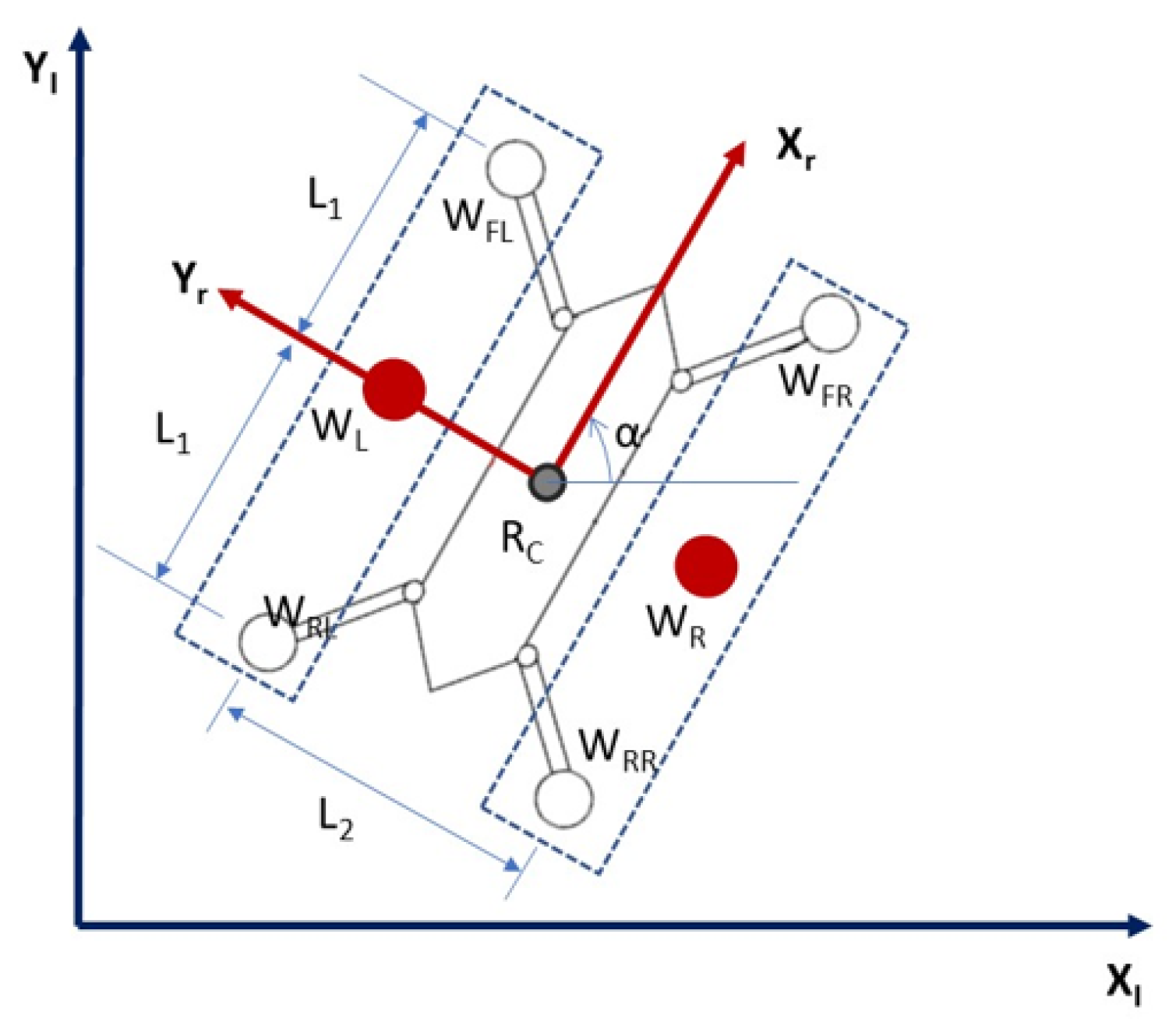
3. Platform’s Kinematics
4. Stability Analysis
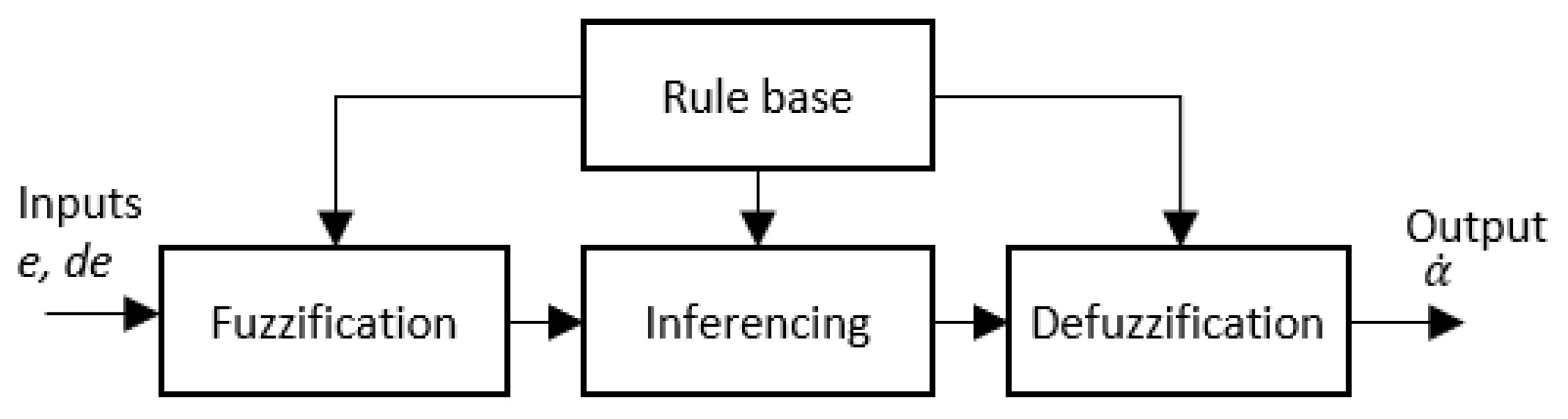
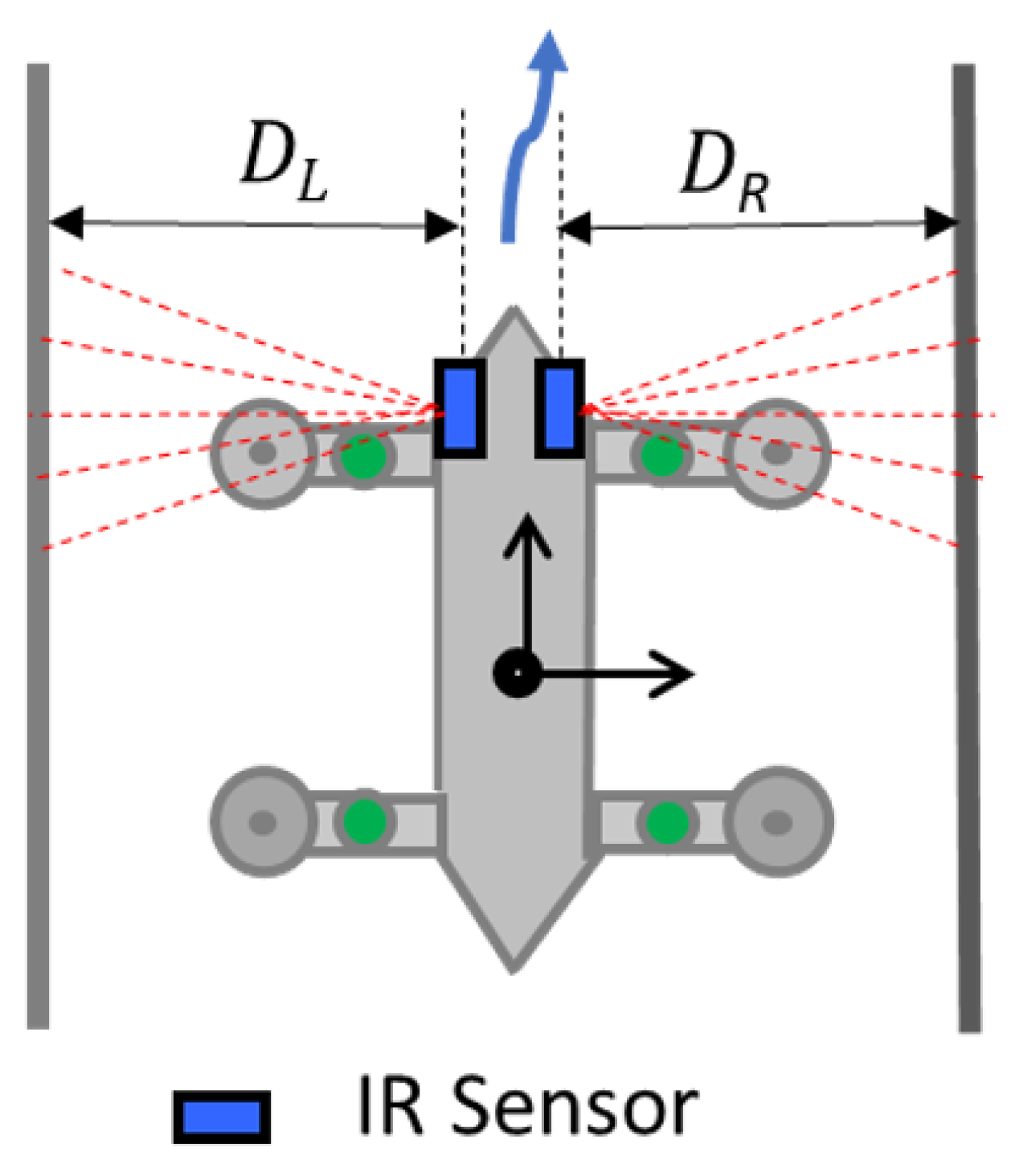
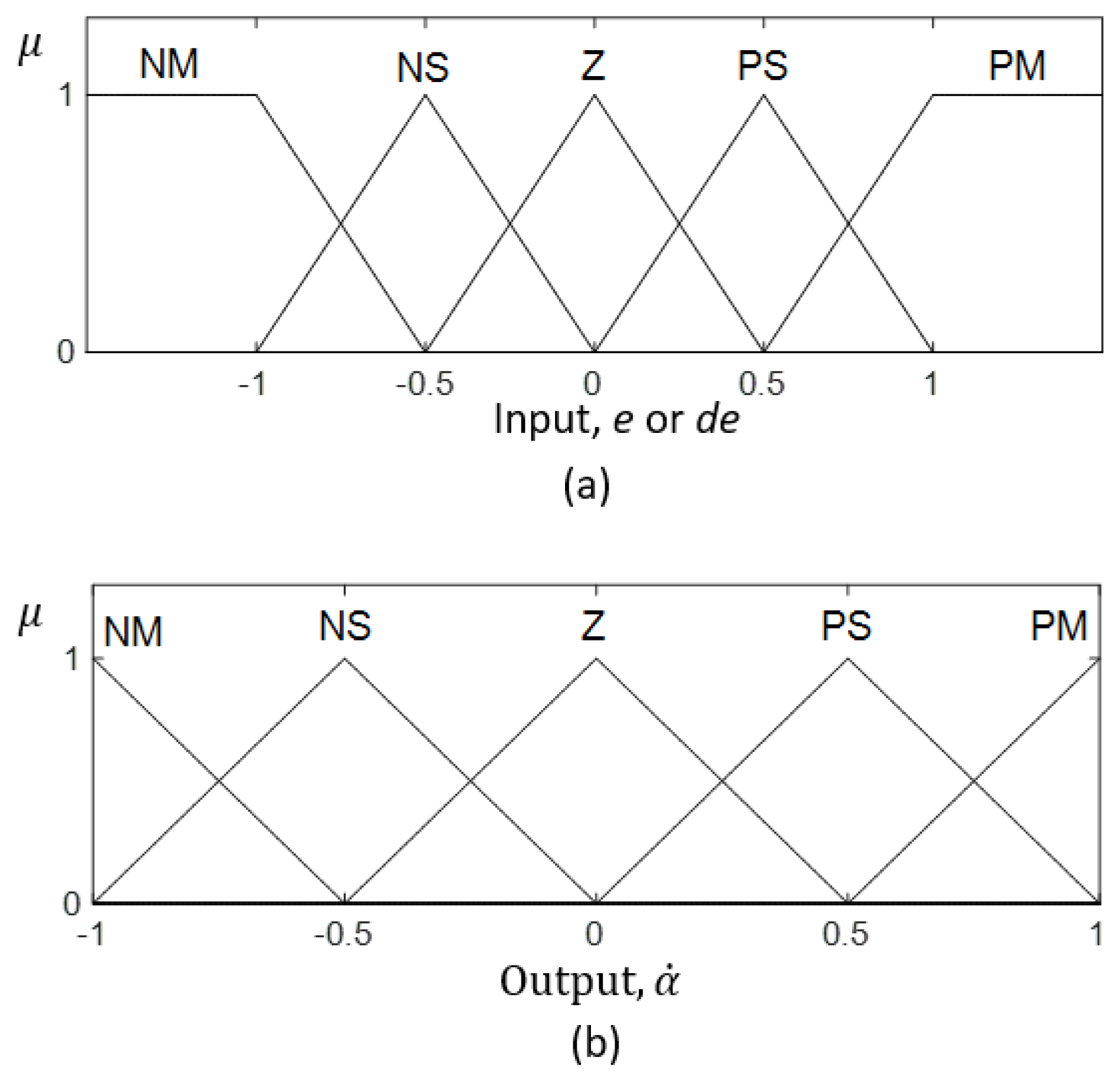
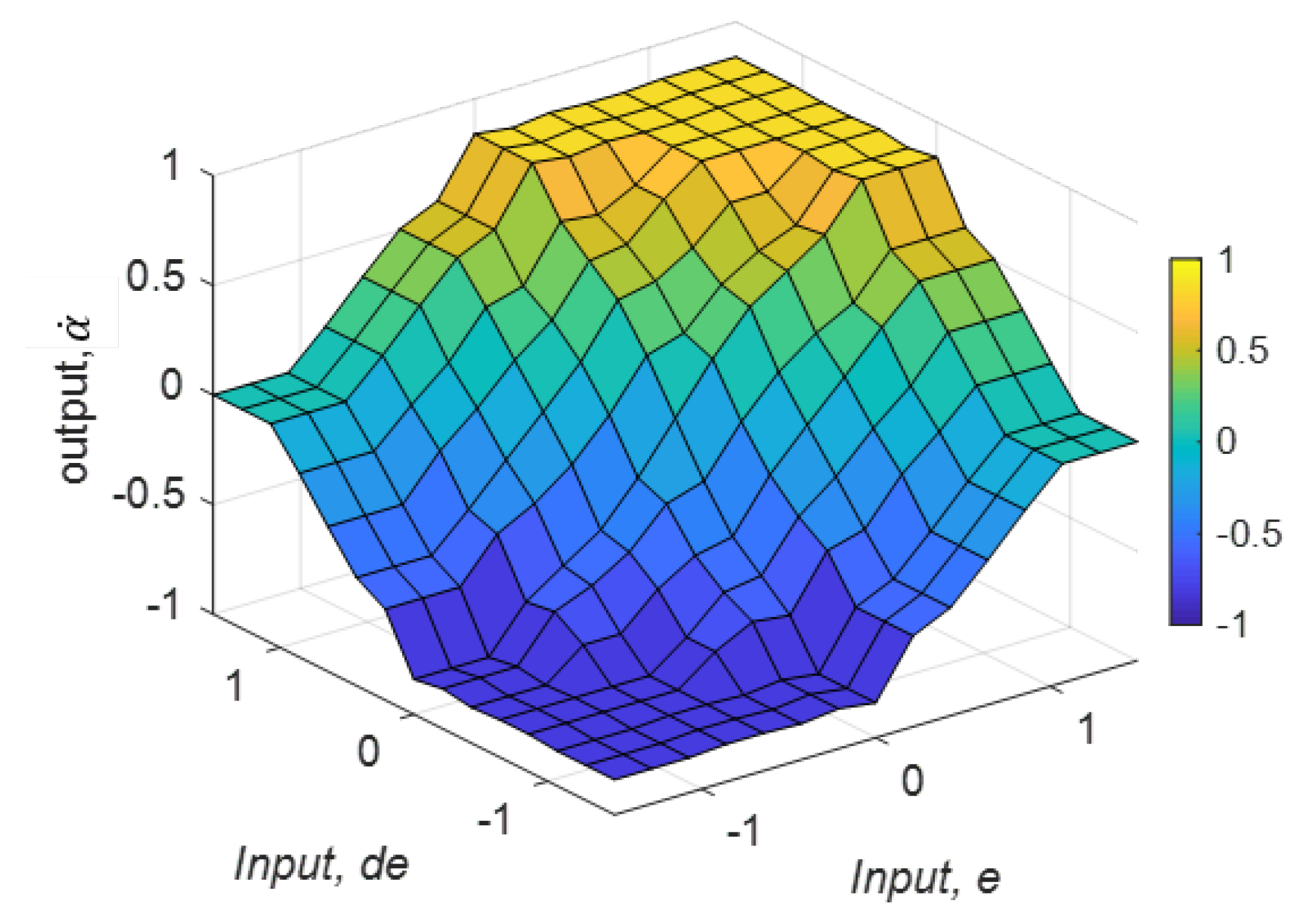
5. Fuzzy Logic System for Wall Collision Avoidance
6. Experimental Results and Discussion
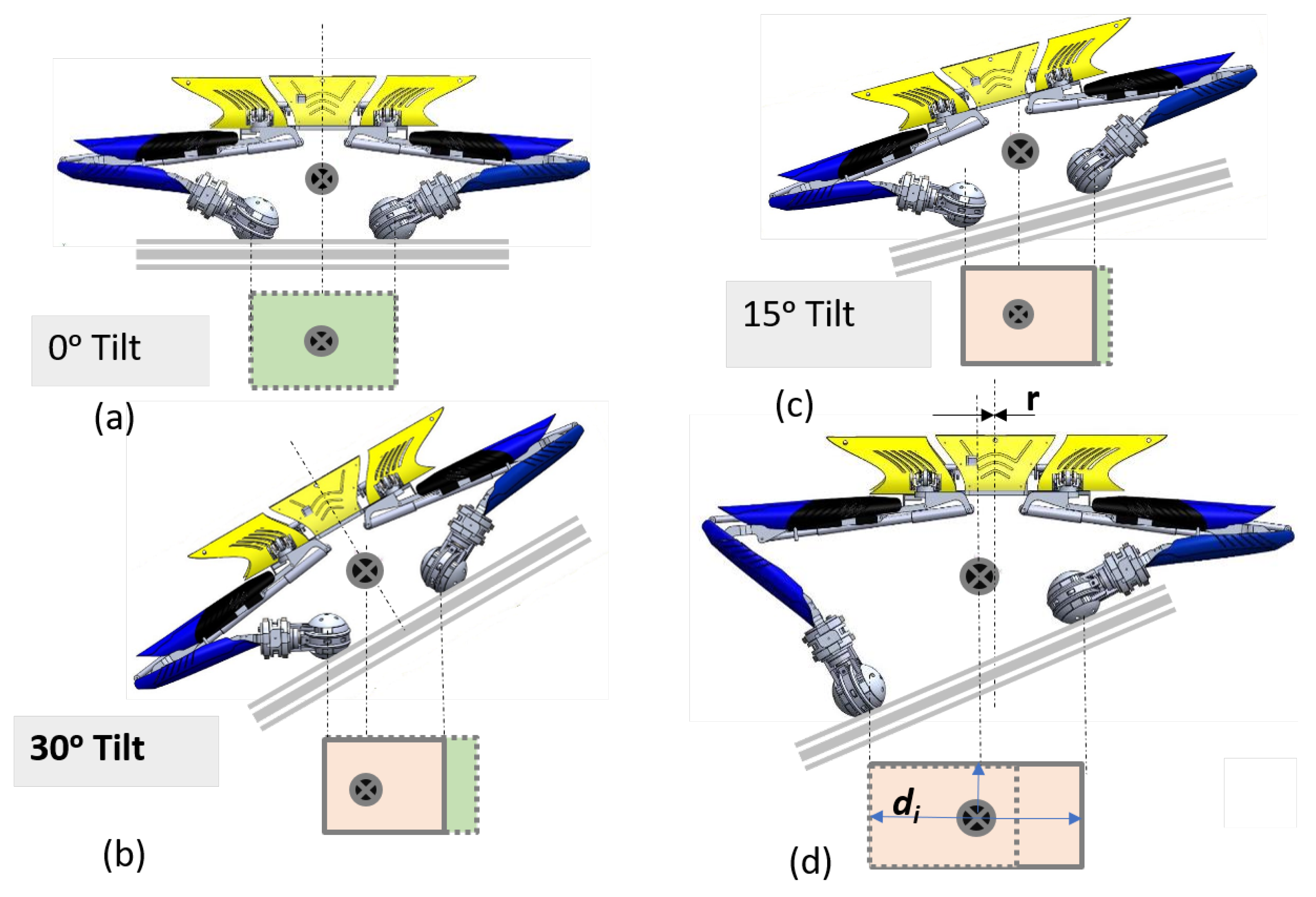
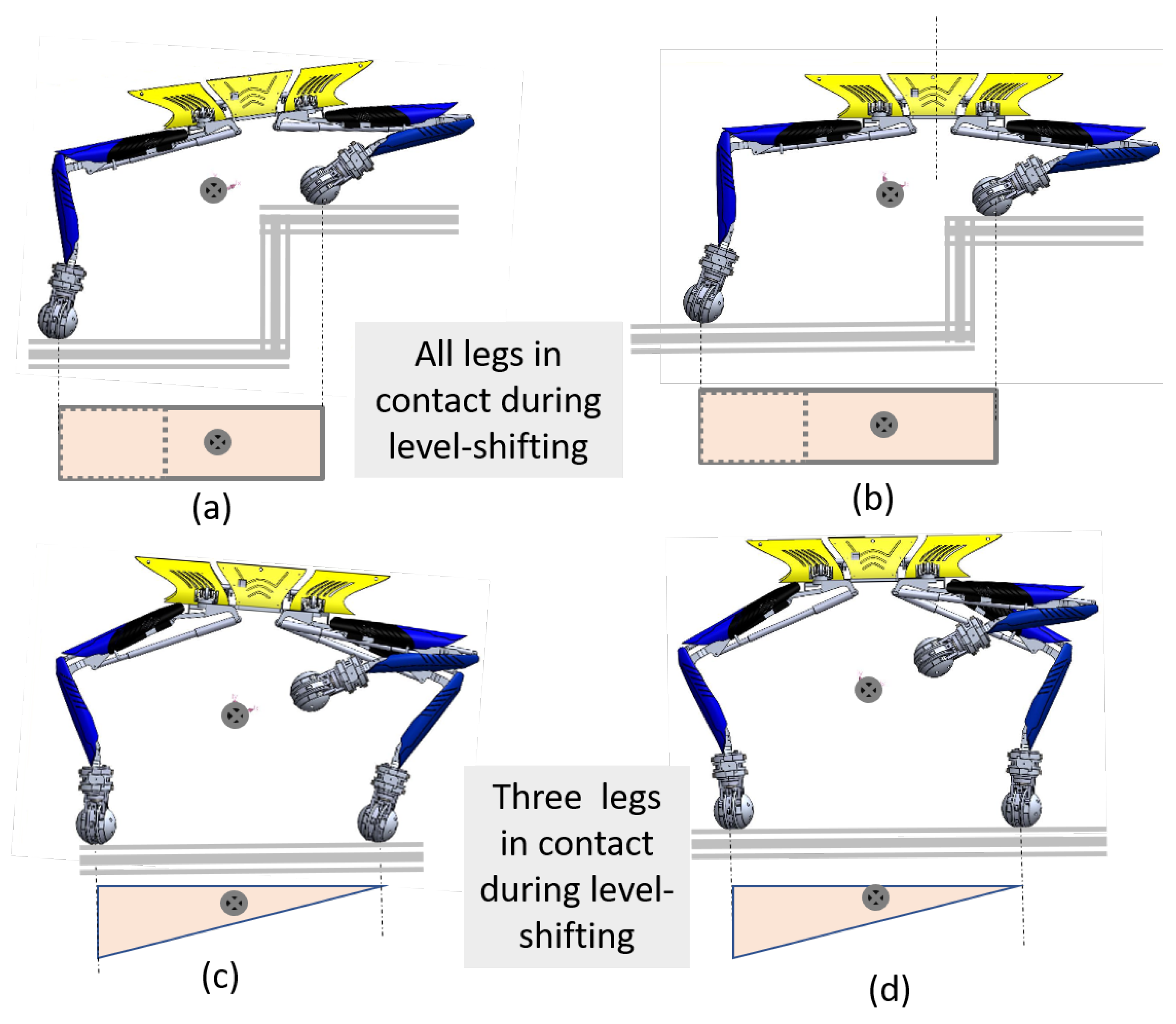
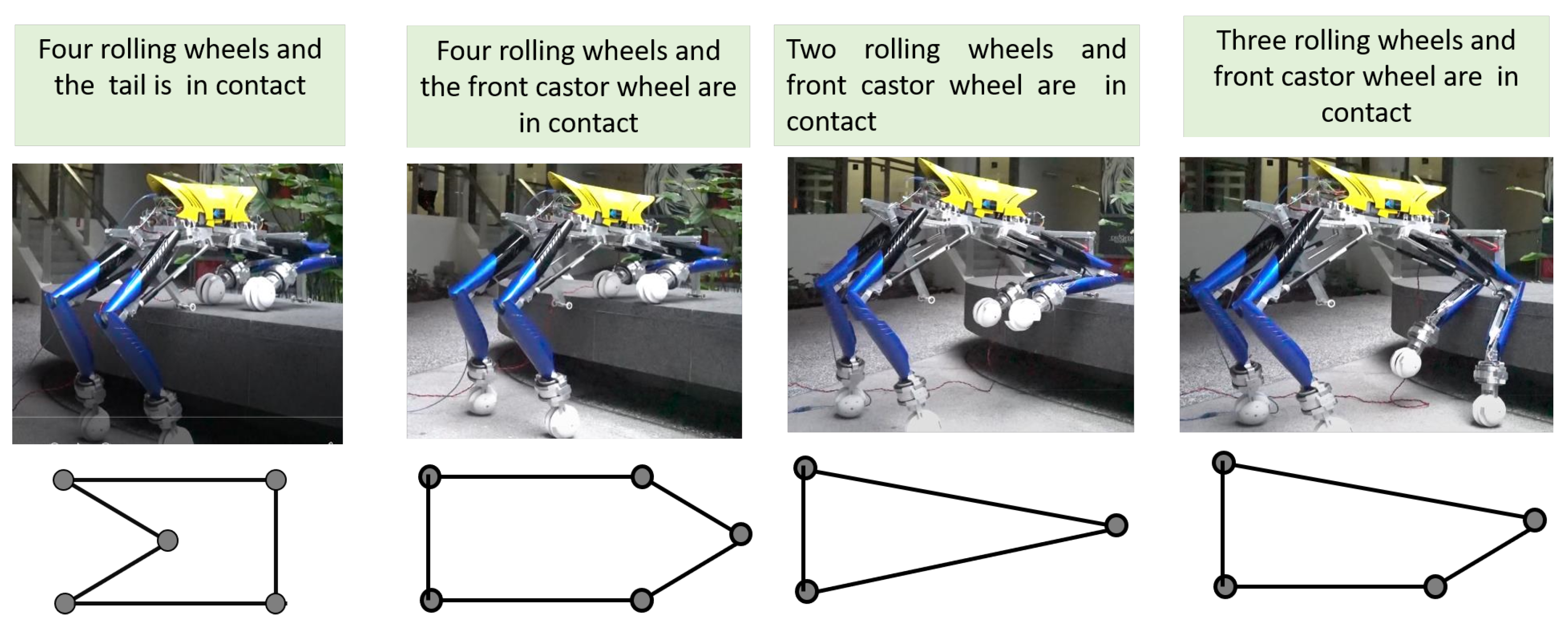
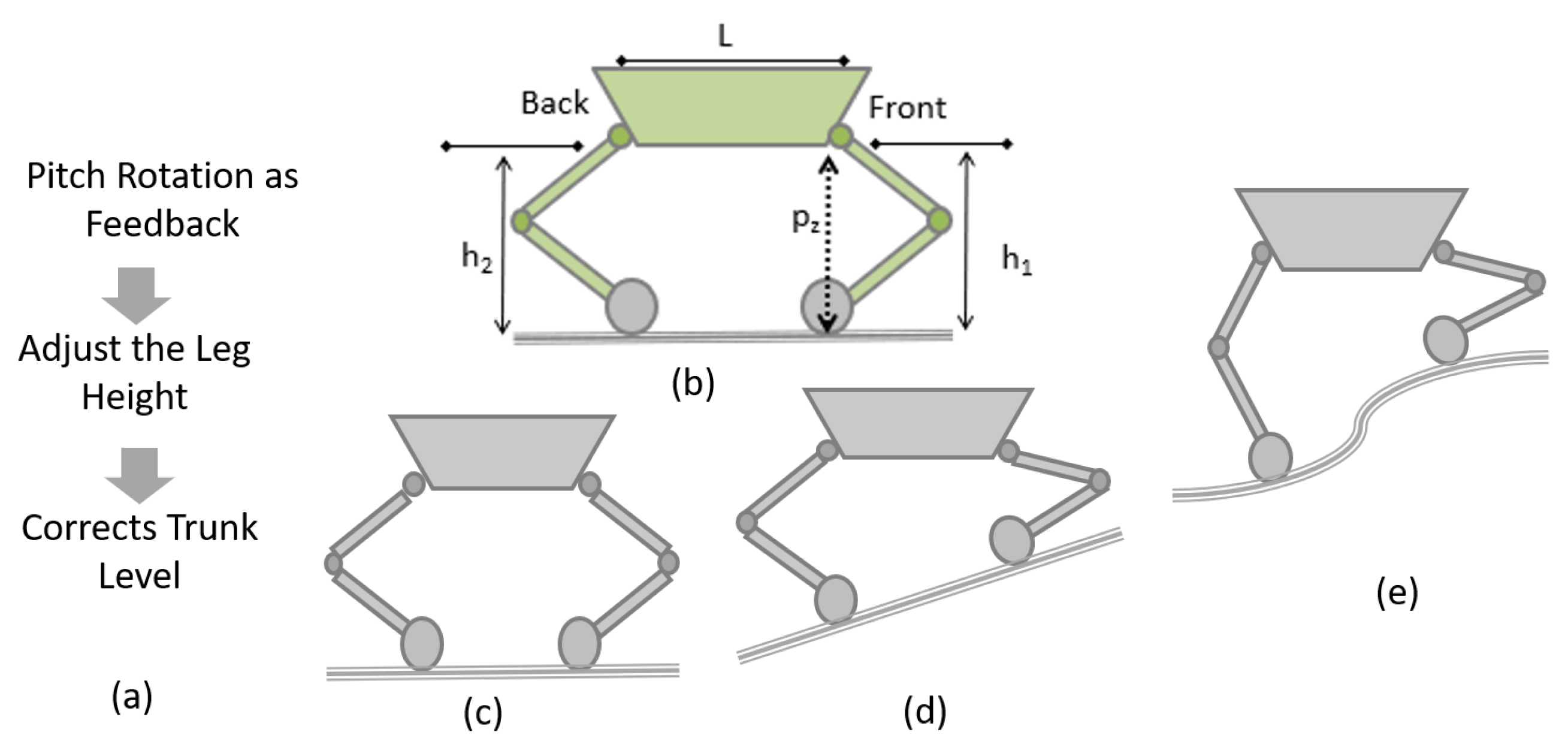
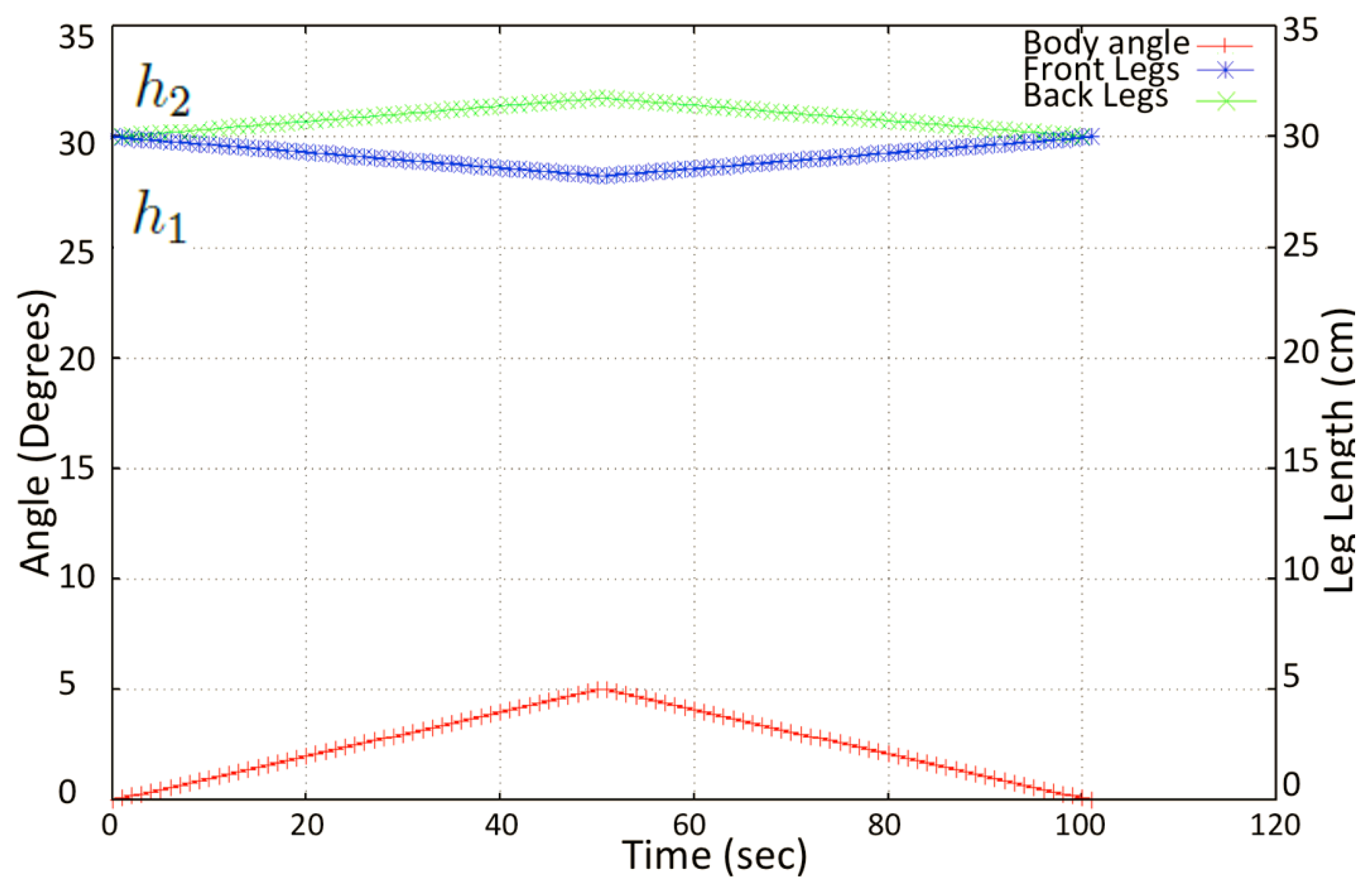
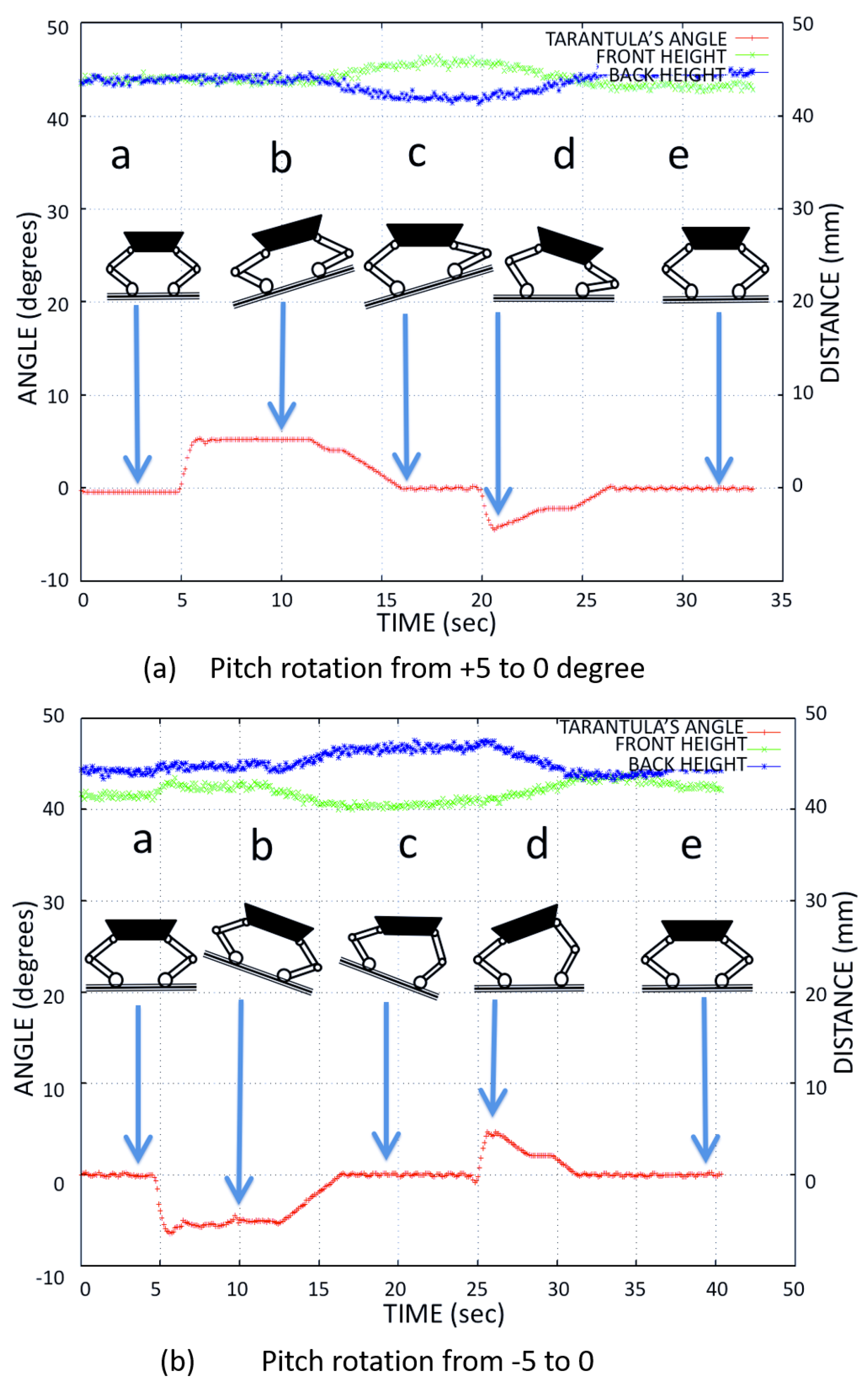
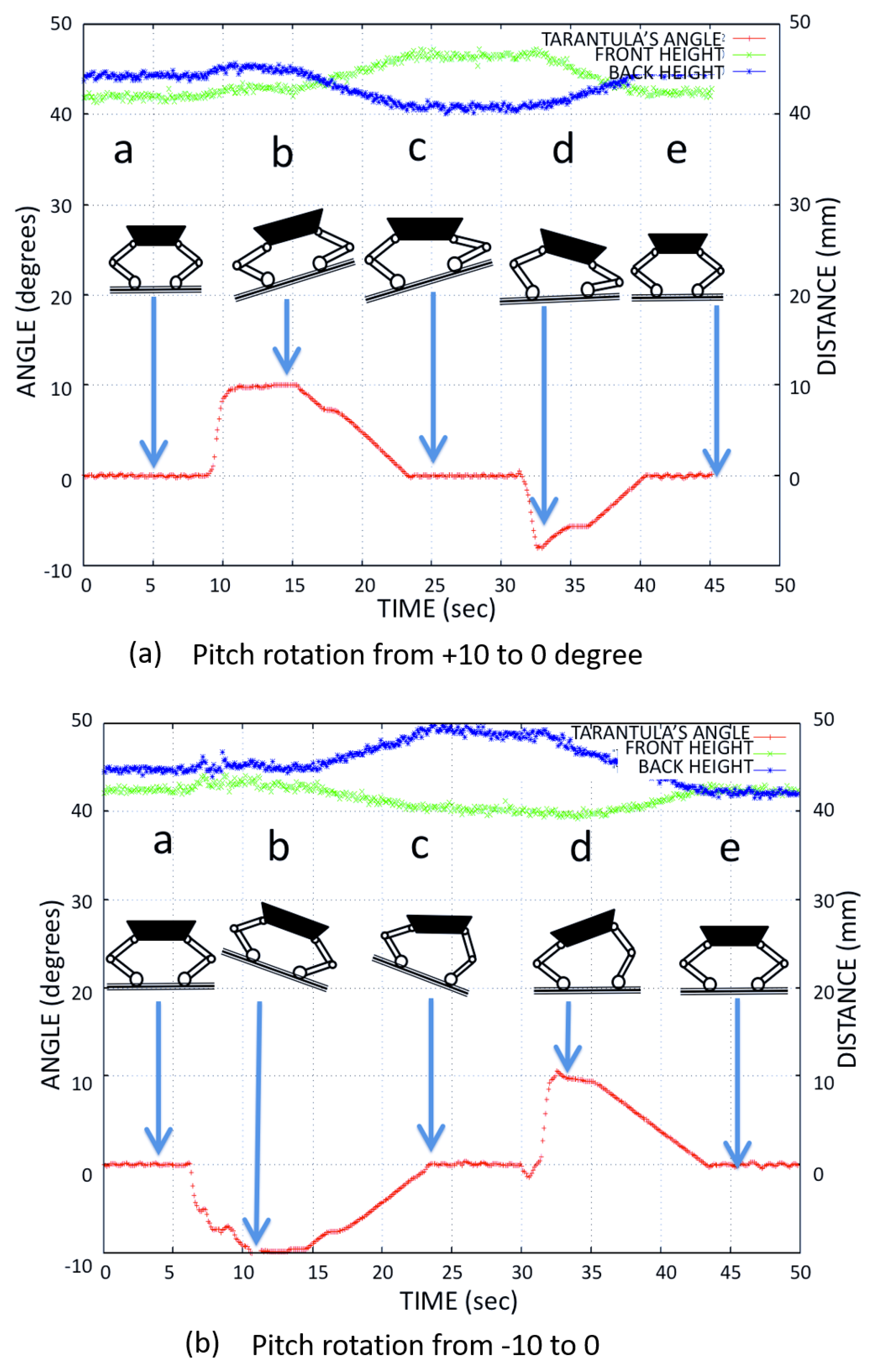
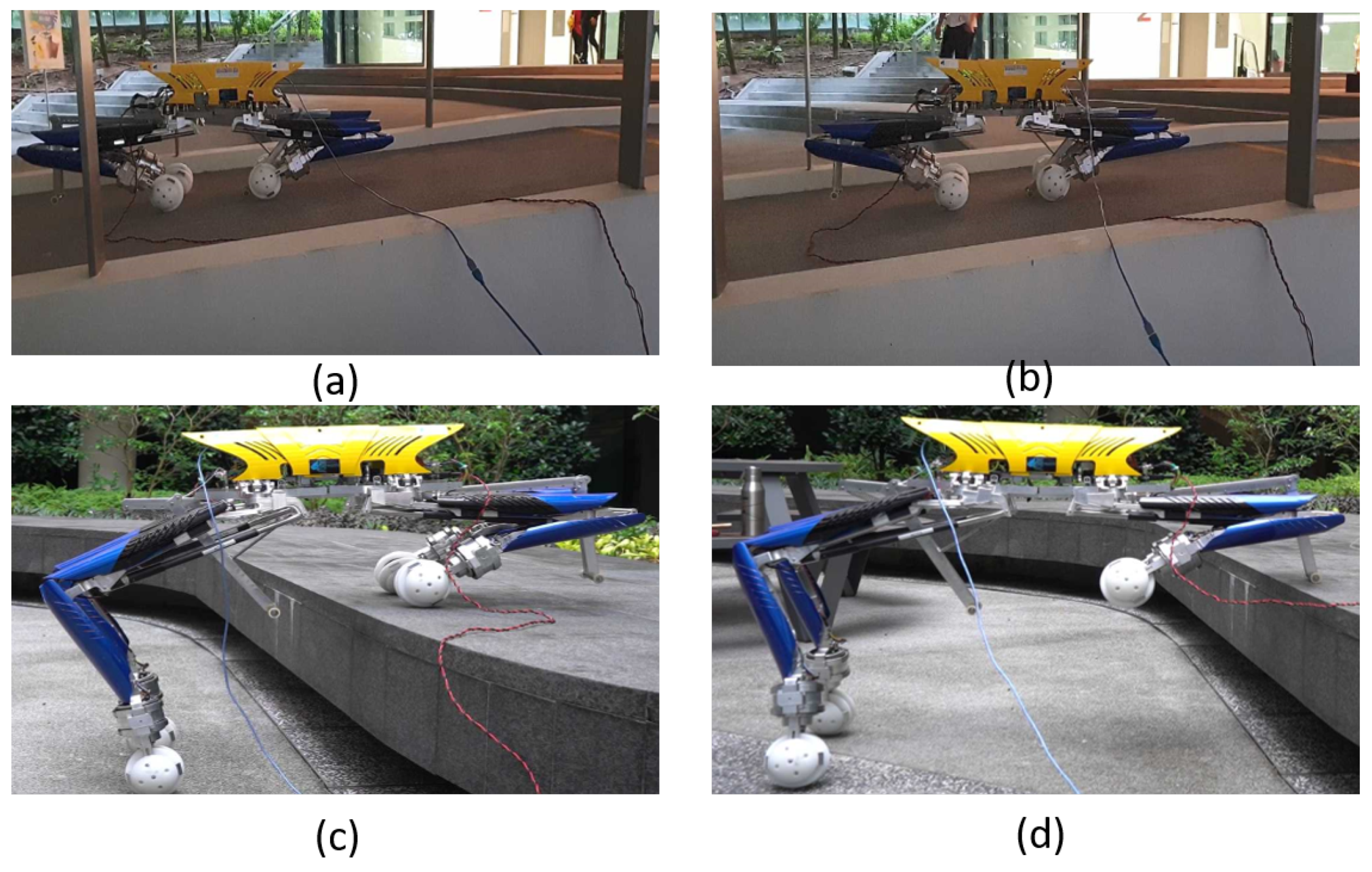
6.1. Level Shifting Capability Using IMU
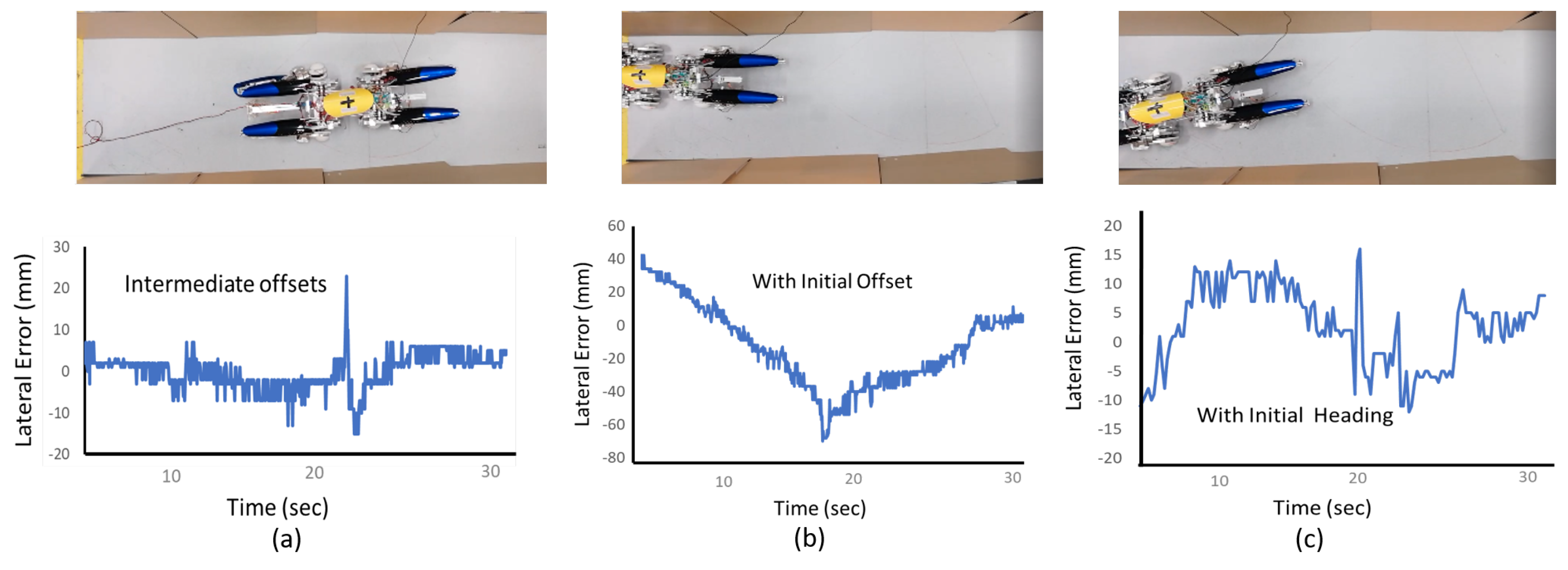
6.2. Wall Collision Avoidance Based Navigation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wilcox, B.H.; Litwin, T.; Biesiadecki, J.; Matthews, J.; Heverly, M.; Morrison, J.; Townsend, J.; Ahmad, N.; Sirota, A.; Cooper, B. ATHLETE: A cargo handling and manipulation robot for the moon. J. Field Robot. 2007, 24, 421–434. [Google Scholar] [CrossRef]
- Bjelonic, M.; Sankar, P.K.; Bellicoso, C.D.; Vallery, H.; Hutter, M. Rolling in the Deep–Hybrid Locomotion for Wheeled-Legged Robots using Online Trajectory Optimization. arXiv 2019, arXiv:1909.07193. [Google Scholar] [CrossRef]
- Interaction Mechanical Analysis between the Lunar Rover Wheel-Leg Foot and Lunar Soil. Procedia Eng. 2012, 29, 58–63. [CrossRef]
- Yuk, N.S.; Kwon, D.S. Realization of expressive body motion using leg-wheel hybrid mobile robot: KaMERo1. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008; pp. 2350–2355. [Google Scholar] [CrossRef]
- Tanaka, T.; Hirose, S. Development of leg-wheel hybrid quadruped “AirHopper” design of powerful light-weight leg with wheel. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3890–3895. [Google Scholar] [CrossRef]
- Savin, S.; Vorochaeva, L. Footstep planning for a six-legged in-pipe robot moving in spatially curved pipes. In Proceedings of the 2017 International Siberian Conference on Control and Communications (SIBCON), Astana, Kazakhstan, 29–30 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Roslin, N.S.; Anuar, A.; Jalal, M.F.A.; Sahari, K.S.M. A Review: Hybrid Locomotion of In-pipe Inspection Robot. Procedia Eng. 2012, 41, 1456–1462. [Google Scholar] [CrossRef]
- Han, S.C.; An, J.; Moon, H. A remotely controlled out-pipe climbing robot. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 30 October–2 November 2013; p. 126. [Google Scholar] [CrossRef]
- Tan, N.; Mohan, R.E.; Elangovan, K. Scorpio: A biomimetic reconfigurable rolling–crawling robot. Int. J. Adv. Robot. Syst. 2016, 13, 1729881416658180. [Google Scholar] [CrossRef]
- Yanagida, T.; Elara Mohan, R.; Pathmakumar, T.; Elangovan, K.; Iwase, M. Design and Implementation of a Shape Shifting Rolling–Crawling–Wall-Climbing Robot. Appl. Sci. 2017, 7, 342. [Google Scholar] [CrossRef]
- Koditschek, D.E.; Full, R.J.; Buehler, M. Mechanical aspects of legged locomotion control. Arthropod Struct. Dev. 2004, 33, 251–272. [Google Scholar] [CrossRef] [PubMed]
- Suwannasit, K.; Laksanachawen, S. A bio-inspired hybrid leg-wheel robot. In Proceedings of the 2004 IEEE Region 10 Conference TENCON 2004, Chiang Mai, Thailand, 24 November 2004; Volume 4, pp. 495–497. [Google Scholar] [CrossRef]
- Wu, P.; Liu, M.; Gong, A.; Zhuang, E. Finite Element Analysis of Municipal Drainages Dredging Robot. In Proceedings of the 2018 6th International Conference on Mechanical, Automotive and Materials Engineering (CMAME), Hong Kong, China, 10–12 August 2018; pp. 37–40. [Google Scholar] [CrossRef]
- Fucai, Y.; Lizhu, W. The Design and Study of the Drainage Pipelines Dredging Robot. In Proceedings of the 2010 International Conference on Computing, Control and Industrial Engineering, Wuhan, China, 5–6 June 2010; Volume 1, pp. 17–20. [Google Scholar] [CrossRef]
- Wu, D.; Ogai, H.; Yeh, Y.; Hirai, K.; Abe, T.; Sato, G. Drain pipe inspection robot using wireless communication system. In Proceedings of the 2009 ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009; pp. 3667–3671. [Google Scholar]
- Lee, M.; Park, J.W.; Park, S.; Lee, J.; Park, S.; Kim, J.; Hong, Y.; Suh, J.; Lee, Y. An underwater cleaning robot for industrial reservoirs. In Proceedings of the 2012 IEEE International Conference on Automation Science and Engineering (CASE), Seoul, Korea, 20–24 August 2012; pp. 1168–1172. [Google Scholar] [CrossRef]
- Hayat, A.; Elangovan, K.; Rajesh Elara, M.; Teja, M. Tarantula: Design, modeling, and kinematic identification of a quadruped wheeled robot. Appl. Sci. 2019, 9, 94. [Google Scholar] [CrossRef]
- Wilson, L.; Wilson, J.; Holden, J.; Johnstone, I.; Armstrong, A.; Morris, M. The impact of drain blocking on an upland blanket bog during storm and drought events, and the importance of sampling-scale. J. Hydrol. 2011, 404, 198–208. [Google Scholar] [CrossRef]
- Rey, J.R.; O’Meara, G.F.; O’Connell, S.M.; Cutwa-Francis, M.M. Factors affecting mosquito production from stormwater drains and catch basins in two Florida cities. J. Vector Ecol. 2006, 31, 334–343. [Google Scholar] [CrossRef]
- Richard, T.L.; Steenhuis, T.S. Tile drain sampling of preferential flow on a field scale. J. Contam. Hydrol. 1988, 3, 307–325. [Google Scholar] [CrossRef]
- Morihiro, Y.; Takahashi, N.; Nonaka, K.; Sekiguchi, K. Model Predictive Load Distribution Control for Leg/Wheel Mobile Robots on Rough Terrain. IFAC-Pap. 2018, 51, 441–446. [Google Scholar] [CrossRef]
- Kameduła, M.; Kashiri, N.; Tsagarakis, N.G. Wheeled motion kinematics and control of a hybrid mobility CENTAURO robot. Robot. Auton. Syst. 2020, 103482. [Google Scholar] [CrossRef]
- Bruzzone, L.; Fanghella, P. Mantis hybrid leg-wheel robot: Stability analysis and motion law synthesis for step climbing. In Proceedings of the 2014 IEEE/ASME 10th International Conference on Mechatronic and Embedded Systems and Applications (MESA), Senigallia, Italy, 10–12 September 2014; pp. 1–6. [Google Scholar]
- Li, Y. Dynamic Simulation Analyses of a Six-Leg-Wheel Hybrid Mobile Robot under Uneven Terrains. In Proceedings of the 2010 Third International Conference on Intelligent Networks and Intelligent Systems, Shenyang, China, 1–3 November 2010; pp. 308–311. [Google Scholar] [CrossRef]
- Nakajima, S.; Nakano, E.; Takahashi, T. Motion control technique for practical use of a leg-wheel robot on unknown outdoor rough terrains. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 2, pp. 1353–1358. [Google Scholar]
- Adachi, H.; Koyachi, N. Development of a leg-wheel hybrid mobile robot and its step-passing algorithm. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), Maui, HI, USA, 29 October–3 November 2001; Volume 2, pp. 728–733. [Google Scholar] [CrossRef]
- Heredia, M.V.; Martínez-García, E.A.; Torres-Córdoba, R. Unstructured terrain adaptive navigation of self-reconfigurable quadruped robot. IFAC-Pap. 2015, 48, 183–188. [Google Scholar] [CrossRef]
- Droeschel, D.; Schwarz, M.; Behnke, S. Continuous mapping and localization for autonomous navigation in rough terrain using a 3D laser scanner. Robot. Auton. Syst. 2017, 88, 104–115. [Google Scholar] [CrossRef]
- Matveev, A.S.; Magerkin, V.V.; Savkin, A.V. A method of reactive control for 3D navigation of a nonholonomic robot in tunnel-like environments. Automatica 2020, 114, 108831. [Google Scholar] [CrossRef]
- Adarsh, S.; Kaleemuddin, S.M.; Bose, D.; Ramachandran, K. Performance comparison of Infrared and Ultrasonic sensors for obstacles of different materials in vehicle/robot navigation applications. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bangalore, India, 2016; Volume 149, p. 012141. [Google Scholar]
- Rodin, R.; Štajduhar, I. The challenge of measuring distance to obstacles for the purpose of generating a 2-D indoor map using an autonomous robot equipped with an ultrasonic sensor. In Proceedings of the 2017 40th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 22–26 May 2017; pp. 1021–1026. [Google Scholar]
- Muthugala, M.A.V.J.; Vega-Heredia, M.; Mohan, R.E.; Vishaal, S.R. Design and Control of a Wall Cleaning Robot with Adhesion-Awareness. Symmetry 2020, 12, 122. [Google Scholar] [CrossRef]
- Muthugala, M.A.V.J.; Vega-Heredia, M.; Vengadesh, A.; Sriharsha, G.; Elara, M.R. Design of an Adhesion-Aware Façade Cleaning Robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1441–1447. [Google Scholar]
- Jeong, J.H.; Byun, G.S.; Park, K. Tunnel lane-positioning system for autonomous driving cars using LED chromaticity and fuzzy logic system. ETRI J. 2019, 41, 506–514. [Google Scholar] [CrossRef]
- Premachandra, C.; Gohara, R.; Ninomiya, T.; Kato, K. Smooth Automatic Stopping for Ultra-Compact Vehicles. IEEE Trans. Intell. Veh. 2019, 4, 561–568. [Google Scholar] [CrossRef]
- Mao, X.; Zhang, H.; Wang, Y. Flocking of quad-rotor UAVs with fuzzy control. ISA Trans. 2018, 74, 185–193. [Google Scholar] [CrossRef]
- Sarabakha, A.; Fu, C.; Kayacan, E.; Kumbasar, T. Type-2 fuzzy logic controllers made even simpler: From design to deployment for UAVs. IEEE Trans. Ind. Electron. 2017, 65, 5069–5077. [Google Scholar] [CrossRef]
- Wang, C.; Gu, J.; Li, Z. Switching Motion Control of the Climbing Robot for Aircraft Skin Inspection. In Proceedings of the 2019 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), New Orleans, LA, USA, 23–26 June 2019; pp. 1–6. [Google Scholar]
- Muthugala, M.A.V.J.; Samarakoon, S.M.B.P.; Elara, M.R. Tradeoff between Area Coverage and Energy Usage of a Self-Reconfigurable Floor Cleaning Robot based on User Preference. IEEE Access 2020. [Google Scholar] [CrossRef]
- Dirik, M.; Castillo, O.; Kocamaz, A.F. Visual-Servoing Based Global Path Planning Using Interval Type-2 Fuzzy Logic Control. Axioms 2019, 8, 58. [Google Scholar] [CrossRef]
- Faisal, M.; Algabri, M.; Abdelkader, B.M.; Dhahri, H.; Al Rahhal, M.M. Human expertise in mobile robot navigation. IEEE Access 2017, 6, 1694–1705. [Google Scholar] [CrossRef]
- Deepak, B.; Parhi, D. New strategy for mobile robot navigation using fuzzy logic. In Information Systems Design and Intelligent Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 1–8. [Google Scholar]
- Rojas, M.; Ponce, P.; Molina, A. A fuzzy logic navigation controller implemented in hardware for an electric wheelchair. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418755768. [Google Scholar] [CrossRef]
- Patle, B.; Parhi, D.; Jagadeesh, A.; Kashyap, S.K. Application of probability to enhance the performance of fuzzy based mobile robot navigation. Appl. Soft Comput. 2019, 75, 265–283. [Google Scholar] [CrossRef]
- Nadour, M.; Boumehraz, M.; Cherroun, L.; Puig, V. Mobile robot visual navigation based on fuzzy logic and optical flow approaches. Int. J. Syst. Assur. Eng. Manag. 2019, 10, 1654–1667. [Google Scholar] [CrossRef]
- Adib, A.; Masoumi, B. Mobile robots navigation in unknown environments by using fuzzy logic and learning automata. In Proceedings of the 2017 Artificial Intelligence and Robotics (IRANOPEN), Qazvin, Iran, 9 April 2017; pp. 58–63. [Google Scholar]
- Juang, C.F.; Jhan, Y.H.; Chen, Y.M.; Hsu, C.M. Evolutionary Wall-Following Hexapod Robot Using Advanced Multiobjective Continuous Ant Colony Optimized Fuzzy Controller. IEEE Trans. Cogn. Dev. Syst. 2017, 10, 585–594. [Google Scholar] [CrossRef]
- Muthugala, M.A.V.J.; Samarakoon, S.M.B.P.; Mohan Rayguru, M.; Ramalingam, B.; Elara, M.R. Wall-Following Behavior for a Disinfection Robot Using Type 1 and Type 2 Fuzzy Logic Systems. Sensors 2020, 20, 4445. [Google Scholar] [CrossRef]
- Lee, C.L.; Lin, C.J.; Lin, H.Y. Smart robot wall-following control using a sonar behavior-based fuzzy controller in unknown environments. Smart Sci. 2017, 5, 160–166. [Google Scholar] [CrossRef]
- Lin, T.; Lin, H.; Lin, C.; Chen, C. Mobile robot wall-following control using a behavior-based fuzzy controller in unknown environments. Iran. J. Fuzzy Syst. 2019, 16, 113–124. [Google Scholar]
- Parween, R.; Hayat, A.A.; Elangovan, K.; Apuroop, K.G.S.; Heredia, M.V.; Elara, M.R. Design of a Self-Reconfigurable Drain Mapping Robot With Level-Shifting Capability. IEEE Access 2020, 8, 113429–113442. [Google Scholar] [CrossRef]
- Gupta, M.; Awaysheh, F.M.; Benson, J.; Al Azab, M.; Patwa, F.; Sandhu, R. An attribute-based access control for cloud-enabled industrial smart vehicles. IEEE Trans. Ind. Inform. 2020. [Google Scholar] [CrossRef]
- Gautam, A.K.; Sharma, V.; Prakash, S.; Gupta, M.; Tech, M. Improved hybrid intrusion detection system (HIDS): Mitigating false alarm in cloud computing. BL Joshi 2012, 101. [Google Scholar]
- Gupta, M.; Sandhu, R. Authorization framework for secure cloud assisted connected cars and vehicular internet of things. In Proceedings of the 23nd ACM on Symposium on Access Control Models and Technologies, Indianapolis, IN, USA, 13–15 June 2018; pp. 193–204. [Google Scholar]
- Gupta, M.; Benson, J.; Patwa, F.; Sandhu, R. Dynamic groups and attribute-based access control for next-generation smart cars. In Proceedings of the Ninth ACM Conference on Data and Application Security and Privacy, Richardson, TX, USA, 25–27 March 2019; pp. 61–72. [Google Scholar]
- Jia, Y.; Luo, X.; Han, B.; Liang, G.; Zhao, J.; Zhao, Y. Stability criterion for dynamic gaits of quadruped robot. Appl. Sci. 2018, 8, 2381. [Google Scholar] [CrossRef]
- Sun, T.; Xiang, X.; Su, W.; Wu, H.; Song, Y. A transformable wheel-legged mobile robot: Design, analysis and experiment. Robot. Auton. Syst. 2017, 98, 30–41. [Google Scholar] [CrossRef]
- Doroftei, I.; Ion, I. Design and Locomotion Modes of a Small Wheel-Legged Robot. In Nature-Inspired Mobile Robotics; World Scientific: Singapore, 2013; pp. 609–616. [Google Scholar]
- Karčnik, T. Stability in legged locomotion. Biol. Cybern. 2004, 90, 51–58. [Google Scholar] [CrossRef]
- Lin, B.S.; Song, S.M. Dynamic modeling, stability, and energy efficiency of a quadrupedal walking machine. J. Robot. Syst. 2001, 18, 657–670. [Google Scholar] [CrossRef]
- McGhee, R. On the stability properties of quadruped creeping gait. Math. Bio-Sci. 1977, 3, 131. [Google Scholar] [CrossRef]
- McGhee, R.B.; Frank, A.A. On the stability properties of quadruped creeping gaits. Math. Biosci. 1968, 3, 331–351. [Google Scholar] [CrossRef]
- De Silva, C.W. Intelligent Control: Fuzzy Logic Applications; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Ross, T.J. Fuzzy Logic with Engineering Applications; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Ibarra, L.; Webb, C. Advantages of fuzzy control while dealing with complex/unknown model dynamics: A quadcopter example. New Appl. Artif. Intell. 2016, 93. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Walker, C.L.; Walker, E.A. A First Course in Fuzzy Logic; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Ren, Q.; Bigras, P. A highly accurate model-free motion control system with a Mamdani fuzzy feedback controller Combined with a TSK fuzzy feed-forward controller. J. Intell. Robot. Syst. 2017, 86, 367–379. [Google Scholar] [CrossRef]
- Pourabdollah, A.; Wagner, C.; Aladi, J.H.; Garibaldi, J.M. Improved uncertainty capture for nonsingleton fuzzy systems. IEEE Trans. Fuzzy Syst. 2016, 24, 1513–1524. [Google Scholar] [CrossRef]
- Masmoudi, M.S.; Krichen, N.; Masmoudi, M.; Derbel, N. Fuzzy logic controllers design for omnidirectional mobile robot navigation. Appl. Soft Comput. 2016, 49, 901–919. [Google Scholar] [CrossRef]
- Kumar, N.; Takács, M.; Vámossy, Z. Robot navigation in unknown environment using fuzzy logic. In Proceedings of the 2017 IEEE 15th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 26–28 January 2017; pp. 000279–000284. [Google Scholar]
- Omrane, H.; Masmoudi, M.S.; Masmoudi, M. Fuzzy logic based control for autonomous mobile robot navigation. Comput. Intell. Neurosci. 2016, 2016. [Google Scholar] [CrossRef] [PubMed]
- Zangeneh, M.; Aghajari, E.; Forouzanfar, M. A survey: Fuzzify parameters and membership function in electrical applications. Int. J. Dyn. Control 2020, 8, 1040–1051. [Google Scholar] [CrossRef]
- Wu, D.; Mendel, J.M. Designing practical interval type-2 fuzzy logic systems made simple. In Proceedings of the 2014 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Beijing, China, 6–11 July 2014; pp. 800–807. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| \e | NM | NS | Z | PS | PM |
|---|---|---|---|---|---|
| NM | NM | NM | NM | NS | Z |
| NS | NM | NM | NS | Z | PS |
| Z | NM | NS | Z | PS | PM |
| PS | NS | Z | PS | PM | PM |
| PM | Z | PS | PM | PM | PM |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parween, R.; Muthugala, M.A.V.J.; Heredia, M.V.; Elangovan, K.; Elara, M.R. Collision Avoidance and Stability Study of a Self-Reconfigurable Drainage Robot. Sensors 2021, 21, 3744. https://doi.org/10.3390/s21113744
Parween R, Muthugala MAVJ, Heredia MV, Elangovan K, Elara MR. Collision Avoidance and Stability Study of a Self-Reconfigurable Drainage Robot. Sensors. 2021; 21(11):3744. https://doi.org/10.3390/s21113744
Chicago/Turabian StyleParween, Rizuwana, M. A. Viraj J. Muthugala, Manuel V. Heredia, Karthikeyan Elangovan, and Mohan Rajesh Elara. 2021. "Collision Avoidance and Stability Study of a Self-Reconfigurable Drainage Robot" Sensors 21, no. 11: 3744. https://doi.org/10.3390/s21113744
APA StyleParween, R., Muthugala, M. A. V. J., Heredia, M. V., Elangovan, K., & Elara, M. R. (2021). Collision Avoidance and Stability Study of a Self-Reconfigurable Drainage Robot. Sensors, 21(11), 3744. https://doi.org/10.3390/s21113744