
Robot-Assisted Autism Therapy (RAAT). Criteria and Types of Experiments Using Anthropomorphic and Zoomorphic Robots. Review of the Research

 , , and
, , and
Abstract
1. Introduction
2. Research Method
2.1. Learning Social Behavior: Understanding Emotions
2.2. Non-Verbal Speech (Gestures and Touch)
2.3. Anthropomorphic Thinking
2.4. Complex Social Rules
3. Relationships and Contact Learning
4. Zoomorphic Robots
4.1. Investigation of Stress Biomarkers
4.2. Therapy of Emotional Disorders (Anxiety and Impulsive Behavior.)
4.3. Developing Fun
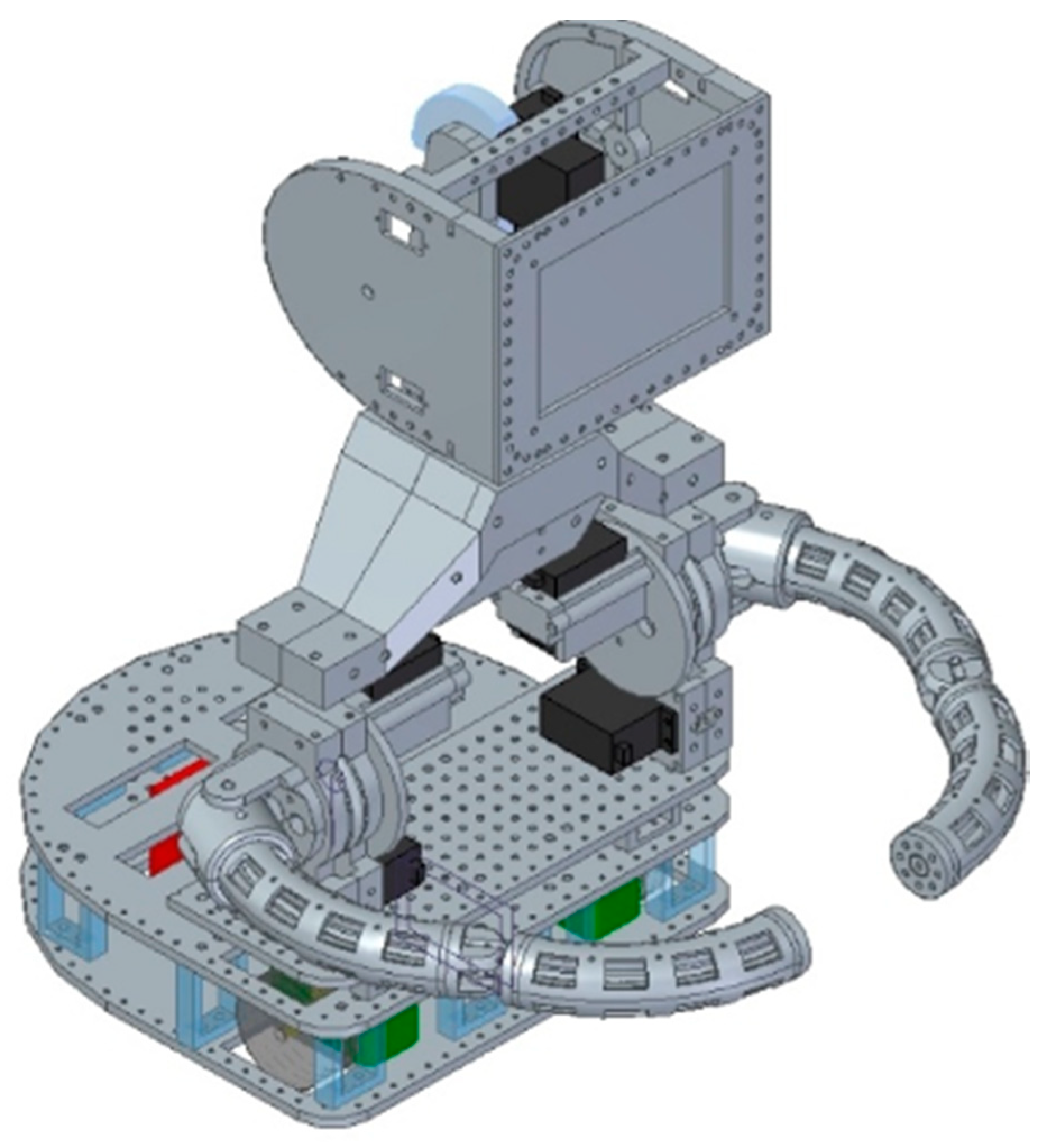
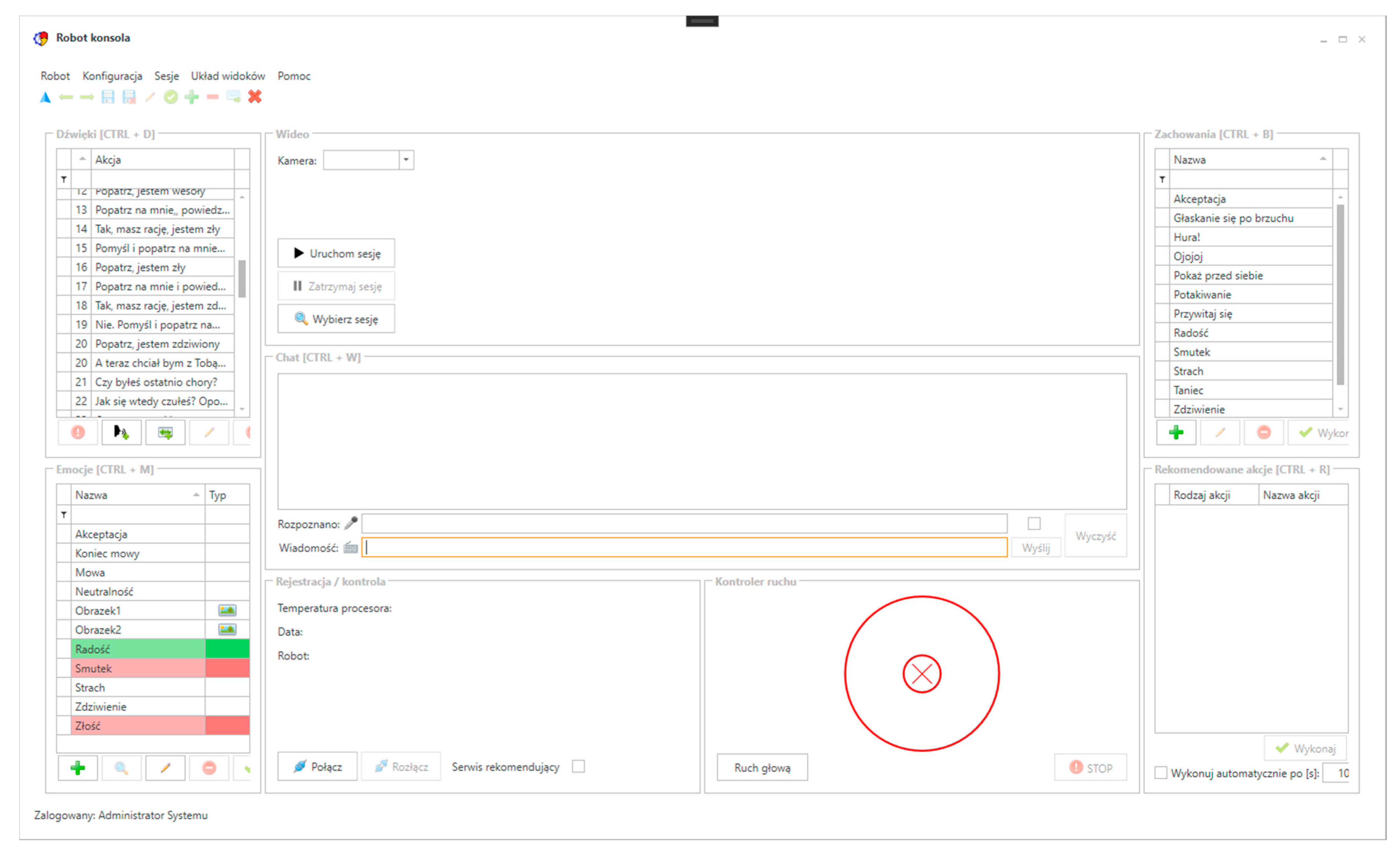
4.4. DreamRobot–System Supporting Therapy of Autistic Children
5. Future Research Directions
6. Conclusions
- (1)
- Age between 4 and 11 years old;
- (2)
- Clinical diagnosis of childhood autism based on the Autism Diagnostic Observation Schedule (ADOS-2) study and International Classification of Diseases (ICD-10) criteria;
- (3)
- Assessment of the severity of clinical symptoms in ADOS-2 from mild (level 1) to moderate, both in social communication and interaction by experienced specialists in the research team (psychiatrist, special pedagogue, and clinical psychologist);
- (4)
- Sufficient verbal level and intelligence quotient above 70;
- (5)
- No current problems with aggressive behavior or increased opposition-rebellious disorders;
- (6)
- Lack of auditory, visual or physical disability that would prevent participation in the study;
- (7)
- Not using psychiatric drugs;
- (8)
- The child is not subjected to any other intervention directly related to emotions or social skills throughout the study;
- (9)
- Lack of neurological treatment and neurological diseases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ricks, D.J.; Colton, M.B. Trends and considerations in robot-assisted autism therapy. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4354–4359. [Google Scholar]
- Scassellati, B.; Admoni, H.; Matarić, M. Robots for Use in Autism Research. Annu. Rev. Biomed. Eng. 2012, 14, 275–294. [Google Scholar] [CrossRef] [PubMed]
- Kim, E.S.; Berkovits, L.D.; Bernier, E.P.; Leyzberg, D.; Shic, F.; Paul, R.; Scassellati, B. Social Robots as Embedded Reinforcers of Social Behavior in Children with Autism. J. Autism Dev. Disord. 2013, 43, 1038–1049. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Song, W.; Tan, Z.; Wang, Y.; Lam, C.M.; Hoi, S.P.; Xiong, Q.; Chen, J.; Yi, L. Theory of Robot Mind: False Belief Attribution to Social Robots in Children with and Without Autism. Front. Psychol. 2019, 10, 1732. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Song, W.; Tan, Z.; Zhu, H.; Wang, Y.; Lam, C.M.; Weng, Y.; Hoi, S.P.; Lu, H.; Man Chan, B.S.; et al. Could social robots facilitate children with autism spectrum disorders in learning distrust and deception? Comput. Hum. Behav. 2019, 98, 140–149. [Google Scholar] [CrossRef]
- Bharatharaj, J.; Huang, L.; Al-Jumaily, A.; Elara, M.R.; Krägeloh, C. Investigating the Effects of Robot-Assisted Therapy among Children with Autism Spectrum Disorder using Bio-markers. IOP Conf. Ser. Mater. Sci. Eng. 2017, 234, 012017. [Google Scholar] [CrossRef]
- Chernyak, N.; Gary, H.E. Children’s Cognitive and Behavioral Reactions to an Autonomous Versus Controlled Social Robot Dog. Early Educ. Dev. 2016, 27, 1175–1189. [Google Scholar] [CrossRef]
- Kurnicki, A.; Stańczyk, B. Development of a modular light-weight manipulator for human-robot interaction in medical applications. IAPGOS 2020, 10, 33–37. [Google Scholar] [CrossRef]
- Wójcicki, P.; Powroźnik, P.; Żyła, K.; Grzegórski, S. Influence of mobile robot control algorithms on the process of avoiding obstacles. Inform. Autom. Pomiary W Gospod. I Ochr. Sr. 2018, 8. [Google Scholar] [CrossRef]
- Romanyuk, O.N.; Vyatkin, S.I.; Pavlov, S.V.; Mykhaylov, P.I.; Chekhmestruk, R.Y.; Perun, I.V. Face recognition techniques. IAPGOS 2020, 10, 52–57. [Google Scholar] [CrossRef]
- Povhan, I. Logical classification trees in recognition problems. IAPGOS 2020, 10, 12–15. [Google Scholar] [CrossRef]
- Coeckelbergh, M.; Pop, C.; Simut, R.; Peca, A.; Pintea, S.; David, D.; Vanderborght, B. A Survey of Expectations About the Role of Robots in Robot-Assisted Therapy for Children with ASD: Ethical Acceptability, Trust, Sociability, Appearance, and Attachment. Sci. Eng. Ethics 2016, 22, 47–65. [Google Scholar] [CrossRef] [PubMed]
- Field, T.; Field, T.; Sanders, C.; Nadel, J. Children with Autism Display more Social Behaviors after Repeated Imitation Sessions. Autism 2001, 5, 317–323. [Google Scholar] [CrossRef] [PubMed]
- Grandin, T. Thinking in Pictures: And Other Reports from My Life with Autism; Bloomsbury: London, UK, 2006; ISBN 978-0-7475-8532-9. [Google Scholar]
- Marino, F.; Chilà, P.; Sfrazzetto, S.T.; Carrozza, C.; Crimi, I.; Failla, C.; Busà, M.; Bernava, G.; Tartarisco, G.; Vagni, D.; et al. Outcomes of a Robot-Assisted Social-Emotional Understanding Intervention for Young Children with Autism Spectrum Disorders. J. Autism Dev. Disord. 2020, 50, 1973–1987. [Google Scholar] [CrossRef] [PubMed]
- Picci, G.; Scherf, K.S. A Two-Hit Model of Autism: Adolescence as the Second Hit. Clin. Psychol. Sci. 2015, 3, 349–371. [Google Scholar] [CrossRef]
- Weinstein, N.; Przybylski, A.K.; Ryan, R.M. The index of autonomous functioning: Development of a scale of human autonomy. J. Res. Personal. 2012, 46, 397–413. [Google Scholar] [CrossRef]
- Valadão, C.T.; Goulart, C.; Rivera, H.; Caldeira, E.; Bastos Filho, T.F.; Frizera-Neto, A.; Carelli, R. Analysis of the use of a robot to improve social skills in children with autism spectrum disorder. Res. Biomed. Eng. 2016, 32, 161–175. [Google Scholar] [CrossRef]
- Kumazaki, H.; Muramatsu, T.; Yoshikawa, Y.; Yoshimura, Y.; Ikeda, T.; Hasegawa, C.; Saito, D.N.; Shimaya, J.; Ishiguro, H.; Mimura, M.; et al. Brief Report: A Novel System to Evaluate Autism Spectrum Disorders Using Two Humanoid Robots. J. Autism Dev. Disord. 2019, 49, 1709–1716. [Google Scholar] [CrossRef]
- Cossu, G.; Boria, S.; Copioli, C.; Bracceschi, R.; Giuberti, V.; Santelli, E.; Gallese, V. Motor Representation of Actions in Children with Autism. PLoS ONE 2012, 7, e44779. [Google Scholar] [CrossRef]
- Buffington, D.M.; Krantz, P.J.; McClannahan, L.E.; Poulson, C.L. Procedures for Teaching Appropriate Gestural Communication Skills to Children with Autism. J. Autism Dev. Disord. 1998, 28, 535–545. [Google Scholar] [CrossRef]
- So, W.-C.; Wong, M.K.-Y.; Cabibihan, J.-J.; Lam, C.K.-Y.; Chan, R.Y.-Y.; Qian, H.-H. Using robot animation to promote gestural skills in children with autism spectrum disorders: Gestural training by animated robot. J. Comput Assist. Learn. 2016, 32, 632–646. [Google Scholar] [CrossRef]
- So, W.-C.; Wong, M.K.-Y.; Lui, M.; Yip, V. The development of co-speech gesture and its semantic integration with speech in 6- to 12-year-old children with autism spectrum disorders. Autism 2015, 19, 956–968. [Google Scholar] [CrossRef]
- Bai, S.; Repetti, R.L.; Sperling, J.B. Children’s expressions of positive emotion are sustained by smiling, touching, and playing with parents and siblings: A naturalistic observational study of family life. Dev. Psychol. 2016, 52, 88–101. [Google Scholar] [CrossRef]
- Cascio, C.J.; Moore, D.; McGlone, F. Social touch and human development. Dev. Cogn. Neurosci. 2019, 35, 5–11. [Google Scholar] [CrossRef] [PubMed]
- Ackerley, R.; Backlund Wasling, H.; Liljencrantz, J.; Olausson, H.; Johnson, R.D.; Wessberg, J. Human C-Tactile Afferents Are Tuned to the Temperature of a Skin-Stroking Caress. J. Neurosci. 2014, 34, 2879–2883. [Google Scholar] [CrossRef] [PubMed]
- Walker, S.C.; Trotter, P.D.; Swaney, W.T.; Marshall, A.; Mcglone, F.P. C-tactile afferents: Cutaneous mediators of oxytocin release during affiliative tactile interactions? Neuropeptides 2017, 64, 27–38. [Google Scholar] [CrossRef]
- Scheele, D.; Kendrick, K.M.; Khouri, C.; Kretzer, E.; Schläpfer, T.E.; Stoffel-Wagner, B.; Güntürkün, O.; Maier, W.; Hurlemann, R. An Oxytocin-Induced Facilitation of Neural and Emotional Responses to Social Touch Correlates Inversely with Autism Traits. Neuropsychopharmacology 2014, 39, 2078–2085. [Google Scholar] [CrossRef]
- Wilbarger, J.; Gunnar, M.; Schneider, M.; Pollak, S. Sensory processing in internationally adopted, post-institutionalized children: Institutionalization and sensory processing. J. Child. Psychol. Psychiatry 2010, 51, 1105–1114. [Google Scholar] [CrossRef]
- Mammen, M.A.; Moore, G.A.; Scaramella, L.V.; Reiss, D.; Ganiban, J.M.; Shaw, D.S.; Leve, L.D.; Neiderhiser, J.M. Infant avoidance during a tactile task predicts autism spectrum behaviors in toddlerhood: Infant Avoidance During a Tactile Task. Infant Ment. Health J. 2015, 36, 575–587. [Google Scholar] [CrossRef] [PubMed]
- Orefice, L.L.; Zimmerman, A.L.; Chirila, A.M.; Sleboda, S.J.; Head, J.P.; Ginty, D.D. Peripheral Mechanosensory Neuron Dysfunction Underlies Tactile and Behavioral Deficits in Mouse Models of ASDs. Cell 2016, 166, 299–313. [Google Scholar] [CrossRef]
- Cascio, C.J.; Gu, C.; Schauder, K.B.; Key, A.P.; Yoder, P. Somatosensory Event-Related Potentials and Association with Tactile Behavioral Responsiveness Patterns in Children with ASD. Brain Topogr. 2015, 28, 895–903. [Google Scholar] [CrossRef]
- Cascio, C.J.; Lorenzi, J.; Baranek, G.T. Self-reported Pleasantness Ratings and Examiner-Coded Defensiveness in Response to Touch in Children with ASD: Effects of Stimulus Material and Bodily Location. J. Autism Dev. Disord. 2016, 46, 1528–1537. [Google Scholar] [CrossRef]
- Schauder, K.B.; Muller, C.L.; Veenstra-VanderWeele, J.; Cascio, C.J. Genetic variation in serotonin transporter modulates tactile hyperresponsiveness in ASD. Res. Autism Spectr. Disord. 2015, 10, 93–100. [Google Scholar] [CrossRef]
- Pryweller, J.R.; Schauder, K.B.; Anderson, A.W.; Heacock, J.L.; Foss-Feig, J.H.; Newsom, C.R.; Loring, W.A.; Cascio, C.J. White matter correlates of sensory processing in autism spectrum disorders. Neuroimage Clin. 2014, 6, 379–387. [Google Scholar] [CrossRef]
- Soleiman, P.; Moradi, H.; Mahmoudi, M.; Teymouri, M.; Pouretemad, H.R. Teaching Turn-Taking Skills to Children with Autism using a Parrot-Like Robot. arXiv 2021, arXiv:2101.12273. [Google Scholar]
- Nakadoi, Y. Usefulness of Animal Type Robot Assisted Therapy for Autism Spectrum Disorder in the Child and Adolescent Psychiatric Ward. In New Frontiers in Artificial Intelligence; Otake, M., Kurahashi, S., Ota, Y., Satoh, K., Bekki, D., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2017; Volume 10091, pp. 478–482. ISBN 978-3-319-50952-5. [Google Scholar]
- Niderla, K.; Maciejewski, M. Construction of a zoomorphical robot for rehabilitation of autistic children. J. Phys. Conf. Ser. 2021, 1782, 012024. [Google Scholar] [CrossRef]
- Wood, L.J.; Zaraki, A.; Robins, B.; Dautenhahn, K. Developing Kaspar: A Humanoid Robot for Children with Autism. Int. J. Soc. Robot. 2019. [Google Scholar] [CrossRef]
- Kahn, P.H.; Gary, H.E.; Shen, S. Children’s Social Relationships with Current and Near-Future Robots. Child. Dev. Perspect. 2013, 7, 32–37. [Google Scholar] [CrossRef]
- Cheok, A.D.; Zhang, E.Y. Are Robots Alive? In Human–Robot. Intimate Relationships; Human–Computer Interaction Series; Springer: Cham, Switzerland, 2019; pp. 159–188. ISBN 978-3-319-94729-7. [Google Scholar]
- Shanmugam, A.K.; Marimuthu, R. A Critical Analysis and Review of Assistive Technology. In Handbook of Decision Support Systems for Neurological Disorders; Elsevier: Amsterdam, The Netherlands, 2021; pp. 263–281. ISBN 978-0-12-822271-3. [Google Scholar]
- Patsadu, O.; Muchchimwong, Y.; Narudkun, N. The Development of Game to Develop the Cognitive Skill for Autistic Children via Virtual Reality. Inf. Technol. J. 2019, 15, 12–22. [Google Scholar]
- Liu, S.; Xi, Y.; Wang, H. The Utility of the Virtual Reality in Autistic Disorder Treatment. In Universal Access in Human-Computer Interaction. Methods, Technologies, and Users; Antona, M., Stephanidis, C., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2018; Volume 10907, pp. 551–559. ISBN 978-3-319-92048-1. [Google Scholar]
- Shahab, M.; Taheri, A.; Mokhtari, M.; Shariati, A.; Heidari, R.; Meghdari, A.; Alemi, M. Utilizing social virtual reality robot (V2R) for music education to children with high-functioning autism. Educ. Inf. Technol. 2021. [Google Scholar] [CrossRef]
- Mesa-Gresa, P.; Gil-Gómez, H.; Lozano-Quilis, J.-A.; Gil-Gómez, J.-A. Effectiveness of Virtual Reality for Children and Adolescents with Autism Spectrum Disorder: An Evidence-Based Systematic Review. Sensors 2018, 18, 2486. [Google Scholar] [CrossRef]
- Taheri, A.; Meghdari, A.; Alemi, M.; Pouretemad, H.; Poorgoldooz, P.; Roohbakhsh, M. Social Robots and Teaching Music to Autistic Children: Myth or Reality? In Social Robotics; Agah, A., Cabibihan, J.-J., Howard, A.M., Salichs, M.A., He, H., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2016; Volume 9979, pp. 541–550. ISBN 978-3-319-47436-6. [Google Scholar]
- Taheri, A.; Meghdari, A.; Alemi, M.; Pouretemad, H. Teaching Music to Children with Autism: A Social Robotics Challenge. Sci. Iran 2017. [Google Scholar] [CrossRef]
- Feng, Y.; Cai, Y. A Gaze Tracking System for Children with Autism Spectrum Disorders. In Simulation and Serious Games for Education; Cai, Y., Goei, S.L., Trooster, W., Eds.; Gaming Media and Social Effects; Springer: Singapore, 2017; pp. 137–145. ISBN 978-981-10-0860-3. [Google Scholar]
- François, D.; Powell, S.; Dautenhahn, K. A long-term study of children with autism playing with a robotic pet: Taking inspirations from non-directive play therapy to encourage children’s proactivity and initiative-taking. IS Interact. Stud. 2009, 10, 324–373. [Google Scholar] [CrossRef]
- Redwood, B.; Schöffer, F.; Garret, B. The 3D Printing Handbook: Technologies, Design and Applications; 3D HUBS: Amsterdam, The Netherlands, 2017; ISBN 978-90-827485-0-5. [Google Scholar]
- Dhillon, H.S.; Huang, H.; Viswanathan, H. Wide-area Wireless Communication Challenges for the Internet of Things. IEEE Commun. Mag. 2017, 55, 168–174. [Google Scholar] [CrossRef]
- A$degeo XAML Syntax in Detail—WPF.NET Framework. Available online: https://docs.microsoft.com/en-us/dotnet/desktop/wpf/advanced/xaml-syntax-in-detail (accessed on 18 April 2021).
- Palestra, G.; Cazzato, D.; Adamo, F.; Bortone, I.; Distante, C. Assistive Robot, RGB-D Sensor and Graphical User Interface to Encourage Communication Skills in ASD Population. J. Med. Robot. Res. 2017, 2, 1740002. [Google Scholar] [CrossRef]
- Liu, W.; Li, M.; Yi, L. Identifying children with autism spectrum disorder based on their face processing abnormality: A machine learning framework: Face Processing in Autism. Autism Res. 2016, 9, 888–898. [Google Scholar] [CrossRef]
- Ramírez-Duque, A.A.; Bastos, T.; Munera, M.; Cifuentes, C.A.; Frizera-Neto, A. Robot-Assisted Intervention for children with special needs: A comparative assessment for autism screening. Robot. Auton. Syst. 2020, 127, 103484. [Google Scholar] [CrossRef]
- Katsanis, I.A.; Moulianitis, V.C. An Architecture for Safe Child–Robot Interactions in Autism Interventions. Robotics 2021, 10, 20. [Google Scholar] [CrossRef]
- Huijnen, C.A.; AS Lexis, M.; de Witte, L.P. Robots as New Tools in Therapy and Education for Children with Autism. Int. J. Neurorehabilit. Eng. 2017, 4. [Google Scholar] [CrossRef]
- De Korte, M.W.; van den Berk-Smeekens, I.; van Dongen-Boomsma, M.; Oosterling, I.J.; Den Boer, J.C.; Barakova, E.I.; Lourens, T.; Buitelaar, J.K.; Glennon, J.C.; Staal, W.G. Self-initiations in young children with autism during Pivotal Response Treatment with and without robot assistance. Autism 2020, 24, 2117–2128. [Google Scholar] [CrossRef]
- Ramírez-Duque, A.A.; Aycardi, L.F.; Villa, A.; Munera, M.; Bastos, T.; Belpaeme, T.; Frizera-Neto, A.; Cifuentes, C.A. Collaborative and Inclusive Process with the Autism Community: A Case Study in Colombia About Social Robot Design. Int. J. Soc. Robot. 2020. [Google Scholar] [CrossRef]
- Billing, E.; Belpaeme, T.; Cai, H.; Cao, H.-L.; Ciocan, A.; Costescu, C.; David, D.; Homewood, R.; Hernandez Garcia, D.; Gómez Esteban, P.; et al. The DREAM Dataset: Supporting a data-driven study of autism spectrum disorder and robot enhanced therapy. PLoS ONE 2020, 15, e0236939. [Google Scholar] [CrossRef]
- Costescu, C.A.; Vanderborght, B.; David, D.O. The Effects of Robot-Enhanced Psychotherapy: A Meta-Analysis. Rev. Gen. Psychol. 2014, 18, 127–136. [Google Scholar] [CrossRef]
- David, D.O.; Costescu, C.A.; Matu, S.; Szentagotai, A.; Dobrean, A. Effects of a Robot-Enhanced Intervention for Children with ASD on Teaching Turn-Taking Skills. J. Educ. Comput. Res. 2020, 58, 29–62. [Google Scholar] [CrossRef]
- Pennisi, P.; Tonacci, A.; Tartarisco, G.; Billeci, L.; Ruta, L.; Gangemi, S.; Pioggia, G. Autism and social robotics: A systematic review: Autism and social robotics. Autism Res. 2016, 9, 165–183. [Google Scholar] [CrossRef] [PubMed]
- Barnes, J.A.; Park, C.H.; Howard, A.; Jeon, M. Child-Robot Interaction in a Musical Dance Game: An Exploratory Comparison Study between Typically Developing Children and Children with Autism. Int. J. Hum. Comput. Interact. 2021, 37, 249–266. [Google Scholar] [CrossRef] [PubMed]
- Shi, Z.; Groechel, T.R.; Jain, S.; Chima, K.; Rudovic, O.; Matarić, M.J. Toward Personalized Affect-Aware Socially Assistive Robot Tutors in Long-Term Interventions for Children with Autism. arXiv 2021, arXiv:2101.10580. [Google Scholar]
- Shi, Z.; Cao, M.; Pei, S.; Qiao, X.; Groechel, T.R.; Matarić, M.J. Personalized Affect-Aware Socially Assistive Robot Tutors Aimed at Fostering Social Grit in Children with Autism. arXiv 2021, arXiv:2103.15256. [Google Scholar]
- Burns, R.B.; Seifi, H.; Lee, H.; Kuchenbecker, K.J. Getting in touch with children with autism: Specialist guidelines for a touch-perceiving robot. Paladyn J. Behav. Robot. 2020, 12, 115–135. [Google Scholar] [CrossRef]
- Burns, R.B.; Seifi, H.; Lee, H.; Kuchenbecker, K.J. A Haptic Empathetic Robot Animal for Children with Autism. In Proceedings of the Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, Boulder, CO, USA, 8–11 March 2021; pp. 583–585. [Google Scholar]
- Zoder-Martell, K.A.; Floress, M.T.; Schiuchetti, M.B.; Markelz, A.M.; Sayyeh, L. Teachers’ Willingness to Use a Telepresence Robot for Consultation with Students with Autism Spectrum Disorder. Contemp. Sch. Psychol. 2021. [Google Scholar] [CrossRef]
- Lakatos, G.; Wood, L.J.; Syrdal, D.S.; Robins, B.; Zaraki, A.; Dautenhahn, K. Robot-mediated intervention can assist children with autism to develop visual perspective taking skills. Paladyn J. Behav. Robot. 2020, 12, 87–101. [Google Scholar] [CrossRef]
- Liu, X.; Tang, P.; Li, X.; Tian, M. Self-rotatory performance of conical cutter interacted with rock material. Eng. Fail. Anal. 2017, 80, 197–209. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Type of Robot | RAAT Study Area | Results |
|---|---|---|---|
| Kumazaki et al. (2019) [19] | 2 Humanoid robots CommU | Communication and Social Skills | Improvement of social functioning based on the ADOS-2 scenario. |
| Wood et al. (2019) [39] | Humanoid robot Kaspar | Communication and Social Skills | Improvement of social skills. |
| Zhang et al. (2019) [5] | Humanoid robot NAO | Communication and Social Skills | Children with ASD have better results in contacting with the robot then with a real person who performs distrustful tasks. |
| Marino et al. (2020) [15] | Humanoid robot NAO | Recognizing and Understanding Emotions | Improvement of contextual recognition of emotions and improvement of understanding of emotions in the group using social robots. |
| Niderla and Maciejewski (2021) [38] | Zoomorphic DreamRobot | Developing Sensitivity to physical contact, Recognizing and Understanding Emotions | After 6 weeks therapeutic sessions learning and recognizing emotions in face of rabbit, developing of spontaneous and imaginative play; developing social touch. |
| Soleiman (2021) [36] | Zoomorphic Robot RoboParrot | Verbal Communication and Social Skills | Improvement in turn-taking skills. |
| Nakadoi et al. (2017) [37] | Zoomorphic Robot Paro seal | Social touch | Reduce impulsive behavior and anxiety. |
| Buffington et al. (1998) [21] | Humanoid robot NAO | Non-verbal speech | Correct gesture and verbal response, teaching children nine gestures (pointing, shaking head). |
| So et al. (2016) [22] | Humanoid robot NAO | Non-verbal speech | Learning to understand 20 gestures in low functioning children with ASD. |
| Valadao et al. (2016) [18] | Humanoid robot MARIA | play games | Game developing social skills. |
| Shahab et al. (2021) [45] | social Virtual Reality Robot | Education | Educational support in children with high-functioning autism. |
| Patsadu (2019) [43] Liu et al. (2018) [72] Feng (2017) [49] Redwood et al. (2017) [51] | VR game | Education | Assist with education in many areas: social communication, behavioral skills, simulated music playing or driving. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szymona, B.; Maciejewski, M.; Karpiński, R.; Jonak, K.; Radzikowska-Büchner, E.; Niderla, K.; Prokopiak, A. Robot-Assisted Autism Therapy (RAAT). Criteria and Types of Experiments Using Anthropomorphic and Zoomorphic Robots. Review of the Research. Sensors 2021, 21, 3720. https://doi.org/10.3390/s21113720
Szymona B, Maciejewski M, Karpiński R, Jonak K, Radzikowska-Büchner E, Niderla K, Prokopiak A. Robot-Assisted Autism Therapy (RAAT). Criteria and Types of Experiments Using Anthropomorphic and Zoomorphic Robots. Review of the Research. Sensors. 2021; 21(11):3720. https://doi.org/10.3390/s21113720
Chicago/Turabian StyleSzymona, Barbara, Marcin Maciejewski, Robert Karpiński, Kamil Jonak, Elżbieta Radzikowska-Büchner, Konrad Niderla, and Anna Prokopiak. 2021. "Robot-Assisted Autism Therapy (RAAT). Criteria and Types of Experiments Using Anthropomorphic and Zoomorphic Robots. Review of the Research" Sensors 21, no. 11: 3720. https://doi.org/10.3390/s21113720
APA StyleSzymona, B., Maciejewski, M., Karpiński, R., Jonak, K., Radzikowska-Büchner, E., Niderla, K., & Prokopiak, A. (2021). Robot-Assisted Autism Therapy (RAAT). Criteria and Types of Experiments Using Anthropomorphic and Zoomorphic Robots. Review of the Research. Sensors, 21(11), 3720. https://doi.org/10.3390/s21113720