1. Introduction
With the development of three-dimensional (3D) technologies, lidar has gained increasing attention due to its low price, small size, and high precision. In recent years, lidars have been widely used in autonomous driving [
1,
2,
3], aerospace [
4], three-dimensional modeling [
5,
6,
7,
8], and other fields. In these applications, lidars provide the range map of the concerned object or environment, which can be further processed for geological mapping [
9,
10,
11], simultaneous localization and mapping (SLAM) [
12,
13,
14,
15,
16,
17,
18], as well as 3D modeling and reconstruction, even for the modeling of human organs, detection and positioning of necrotic tissues, and other aspects in medicine [
19]. Generally, the 3D structure of the concerned object is scanned by lidar and restored after point cloud scan registration, segmentation, and reconstruction. Due to measurement errors, the raw point cloud data (PCD) are necessarily polluted by various noises [
20], which potentially undermine the accuracy of 3D modeling. Consequently, denoising of PCD is the most important step in 3D point cloud processing before further applications.
In order to mitigate the impact of noise in PCD, researchers have developed many filters to remove noisy data [
21]. Actually, we should usually compromise the efficiency and accuracy in the filter design, because more accurate filtering performance means more computational cost as well as more time-consuming, while a more efficient algorithm means more details of PCD have abandoned rendering loss of accuracy. Yao et al. [
22] proposed a filtering method based on kernel density estimation (KDE), and the threshold was set according to the maximum probability density of points to accelerate the filtering process. Han et al. [
23] deduced a linear model of guidance point cloud such that PCD can be filtered in a more efficient manner, which accompanied the decreased accuracy. In order to improve the filtering accuracy, Li et al. [
24] proposed an improved adaptive filter to generate a filter and high-precision point cloud that can effectively reduce the error. In [
25], PCD was first segmented before filtering to boost performance. How to effectively remove ground noise is always a troublesome problem in environmental 3D modeling. Therefore, many targeted filtering methods [
26] exist to deal with this problem. Yuxiang et al. [
27] extracted the digital terrain model by using the spatial structure of terrain and the spatial coherence between points thereby a good filter scheme for ground noise. Feichter et al. [
28] identified a plane from a PCD, and generalized a description of shape features using triangulation of the boundary to remove noisy points. Liu et al. [
29] proposed a surface modeling method based on the mixed regression technique to determine the plane. Quan et al. [
30] proposed a method based on the filtering of adjacent triangular point clouds in an irregular triangulation network to effectively remove ground noise, therefore a noise-free ground model. However, this method will remove some useful features in PCD in some scenarios, hence some manual restrictions are required to prevent the loss of information. Leal et al. [
31] proposed a filter based on the methods of median filtering and sparse regularization to preserve the sharp noise while removing noise in a PCD. In [
32], the authors specially designed filter schemes for different regions of a PCD in order to farthest preserve the useful information in the PCD, while reducing the universality of the proposed filter. A more universal method based on spatial clustering was proposed by Xu and Yue [
33] to remove noise while preserving complex ground information. Zou et al. [
34] utilized the farthest point weighted mean down-sampling (FWD) technique to search the feature lost due to filtering operation and to retain feature points while denoising. Moreover, there exist other denoising filters based on deep learning [
35,
36], morphology [
37], F-transform [
38], etc.
When outdoor environmental modeling [
39] is carried out with lidar, point cloud noise is generated at the stage of obtaining PCD. The aforementioned methods can effectively remove discrete outlier points which are treated as a noisy target. However, by using these methods, it is difficult to remove high-density noises, such as indoor environmental noises, which are relatively dense. This paper proposes a new filter scheme based on the distribution characteristics of indoor and outdoor point clouds for effectively handling high-density noise. The 3D point cloud is preprocessed by principal component analysis (PCA) [
40] method therefore the reduced 2-dimensional point cloud toward the ground, consequently, the feature points of the wall are separated by a carefully designed grid threshold, which depends on the statistical difference between the pure ground points and the wall points projecting on the mesh grid of ground. This process is called grid principal component analysis (GPCA). Then, KD-tree [
41] for the filtered point cloud is established to estimate normal vector features, which then facilitate the further plane segmentation. After the plane is segmented based on the angles between the normal vectors, the ground model is further optimized by the K nearest neighbor (KNN) method. The main idea of the proposed filter method is shown in
Figure 1. Experimental comparisons with other traditional filters show that the proposed method is significantly advantageous over than other traditional methods, including statistical outlier removal (SOR) filter [
42], voxel grid statistical outlier removal (VGSOR), radius outlier removal (ROR) filter [
43], Gaussian filter [
44], and difference of normals (DON) filter [
45], for removing indoor point cloud noise.
In general, point density, which is an important parameter of lidar data [
46], dramatically affects the performance of the denoising filter. Specifically, higher density means more difficult and computational cost in noise removal [
47]. SOR filter is a simple method for eliminating noisy data by judging whether the average distance of the nearest points is within the threshold, hence it is sensitive to the sparse noisy points and incapable of high-density noises. To overcome this, down-sampling the data with voxel grids before discretizing the block noise is used in the VGSOR filter for lowering point density, therefore the SOR filter can be used. In this manner, the denoising performance for high-density PCD can be improved, however, some useful features in the point cloud are taken as noise since the down-sampling technique will render the loss of accuracy. In the ROR filter method, noises are determined by the specified number of points within a prescribed radius, and the outliers can be well handled by utilizing ROR, however, the computational cost and time consumptions of ROR are overlarge. The Gaussian filter is originally designed for image smoothing, while for PCD filtering, it manipulates the distances of the nearest points by a Gaussian distribution function, therefore the corresponding weight of each nearest point. Thus, one can take the weighted sum of the nearest points after normalization as a new point. In the DON filter, after time-consuming calculation of the included angle between the small range and large range normal vectors of each point, one can determine an appropriate threshold value for effectively eliminating noise.
The rest of this paper is organized as follows.
Section 2.1 presents the principle of GPCA and its usage for PCD processing, then the normal-vector K nearest neighbor (NKNN) method is detailed in
Section 2.2. In
Section 3.1, the hardware equipment that we used in the experiment, as well as the data acquisition details, are briefly introduced. In
Section 3.2, the proposed method is detailed step by step followed by a large number of experimental validations, as well as comparative studies in
Section 3.3.
Section 4 discusses the performance of the proposed method and concludes the advantages and disadvantages in some aspects, while the causes of defects are analyzed. At last, the conclusions and some future prospects are presented in
Section 5.
2. Methods
In this section, we divide the proposed algorithm into two steps for detailed introduction: (1) by using the GPCA method, the wall, and noisy ground are accurately separated from the initial PCD; (2) by using NKNN, the normal vector segmentation, and optimization are carried out for separate ground from noisy PCD.
2.1. Filtering Based on GPCA
PCA is mainly used for reducing the dimensionality of complex data sets. As for 3D PCD, PCA can be used to obtain the normal vector of a point cloud plane. In order to reduce the complexity of 3D point cloud processing and to effectively remove noise, we firstly project a 3D point cloud onto a two-dimensional plane. Then, a statistical grid method is used to separate the ground and noise. The basic idea of GPCA is illustrated in
Figure 2, and its implementing procedure is shown in Algorithm 1.
Firstly, dimensionality reduction via PCA is carried out for PCD. Assuming the input point cloud data
, the covariance matrix
of
is performed a singular value decomposition (SVD) decomposition, therefore the corresponding eigenvectors. The first two eigenvectors are selected as dimensionality reduction matrix for the input
as follows:
where
transforms the 3D point set
into a 2D point set denoted by
, which represents the point set after dimensional reduction.
Then, we mesh the obtained two-dimensional data and set the number of mesh grids to be
. The mesh resolutions
and
respectively along the
and
directions are given by:
where
are the coded number for each point and constrained within 1 to
as follows:
The number of points projected via PCA into a grid
is denoted by
. In order to divide the point cloud into two parts, a threshold parameter
is set as
where
represents the points in the grid
,
refers to the ground and noise points set, and
refers to the wall points set.
can be taken as the input of the subsequent algorithm for further processing.
| Algorithm 1. GPCA outliers removed |
| Input: |
| Output: |
| 1: |
| 2: |
| 3: for do |
| 4: |
| 5: end for |
| 6: |
| 7: |
| 8: |
| 9: |
| 10: |
| 11: |
| 12: |
| 13: |
| 14: for do |
| 15: |
| 16: |
| 17: |
| 18: end for |
| 19: for do |
| 20: |
| 21: if then |
| 22: |
| 23: else |
| 24: |
| 25: end if |
| 26: end for |
| 27: |
2.2. Filtering Based on NKNN
Since the obtained in the last subsection contain both the ground and the noisy points, it is necessary to separate the ground point cloud from for facilitating the final splicing of the ground and the wall in PCD. In this paper, the ground point cloud is segmented by the included angle between the normal vectors of the points, and the category is optimized and classified by the KNN algorithm.
In order to efficiently obtain characteristic information of the point cloud, KD-tree for is constructed first, and then the K nearest neighbor of each point in the tree are found out. Next, the minimum sum of the distance between a plane and its nearest neighbors is calculated, then we take the normal vector of the plane as the characteristic of the corresponding point. With the utilization of PCA, the normal vector of the PCD can be rapidly obtained as follows.
For each group of the K nearest neighbor, the mean of the nearest neighbors and the deviation error are given by:
where
is the mean of the nearest neighbors;
is the difference between the point and the mean value
. The corresponding deviation matrix
is defined by:
Performing an SVD decomposition for
yields:
Then the eigenvector relating to the smallest eigenvalue in is taken as the normal vector of the corresponding point.
The resulted normal vector is used to extract the main components of the ground. Since the point set to be processed contains the ground points, noisy points, and a small number of wall points, the threshold angle between the normal vectors should be carefully prescribed as a key index for the ground plane segmentation. The main steps of ground segmentation are listed as follows:
Pick a random point
from the initial data set
. Compare the angle
between the normal vectors of
and all the other points
as follows:
Set the threshold . If the angle of a is less than , then is classified as . Take the remaining points as the new initial data , and repeat the previous step until all points are classified.
The above procedure is very efficient since only using the included angle of the normal vector as the key index for classification, however, it may lead to errors for some complex scenarios. To reduce the error of classification, an amendment method based on KNN is used to perform further corrections.
As shown in
Figure 3, the KNN method was used to search the K nearest neighbor of the current point and to count the various categories of the nearest neighbor points. We took the category with the largest number as the category of the current point. Then, the class at that point was updated.
Finally, the point corresponding to the largest class in the classified data was taken as the ground data. The data after filtering were obtained by splicing the ground and the wall in the second section. In the process of testing, it is necessary to properly adjust the four parameters of dimension reduction: the number
of grids, the threshold
of grid points, the included angle
of the normal vector, and the number
of adjacent points. The purpose of this paper is to put forward a new method to solve the problem that point cloud noise in buildings cannot be removed by traditional filtering. The basic idea is shown in
Figure 4 and Algorithm 2.
| Algorithm 2. Filtering based on NKNN |
| Input: |
| Output: |
| 1: |
| 2: for do |
| 3: |
| 4: |
| 5: end for |
| 6: for do |
| 7: |
| 8: |
| 9: |
| 10: |
| 11: |
| 12: end for |
| 13: for do |
| 14: for do |
| 15: |
| 16: if then |
| 17: |
| 18: |
| 19: end if |
| 20: end for |
| 21: if then |
| 22: |
| 23: end if |
| 24: end for |
| 25: for do |
| 26: |
| 27: |
| 28: end for |
| 29: if then |
| 30: |
| 31: else |
| 32: |
| 33: end if |
3. Experimental Process and Results
In order to verify the effectiveness of the algorithm, the corresponding data were collected by lidar in this experiment. Finally, the algorithm was compared with traditional algorithms to evaluate its merits and demerits.
3.1. Hardware and Operating System
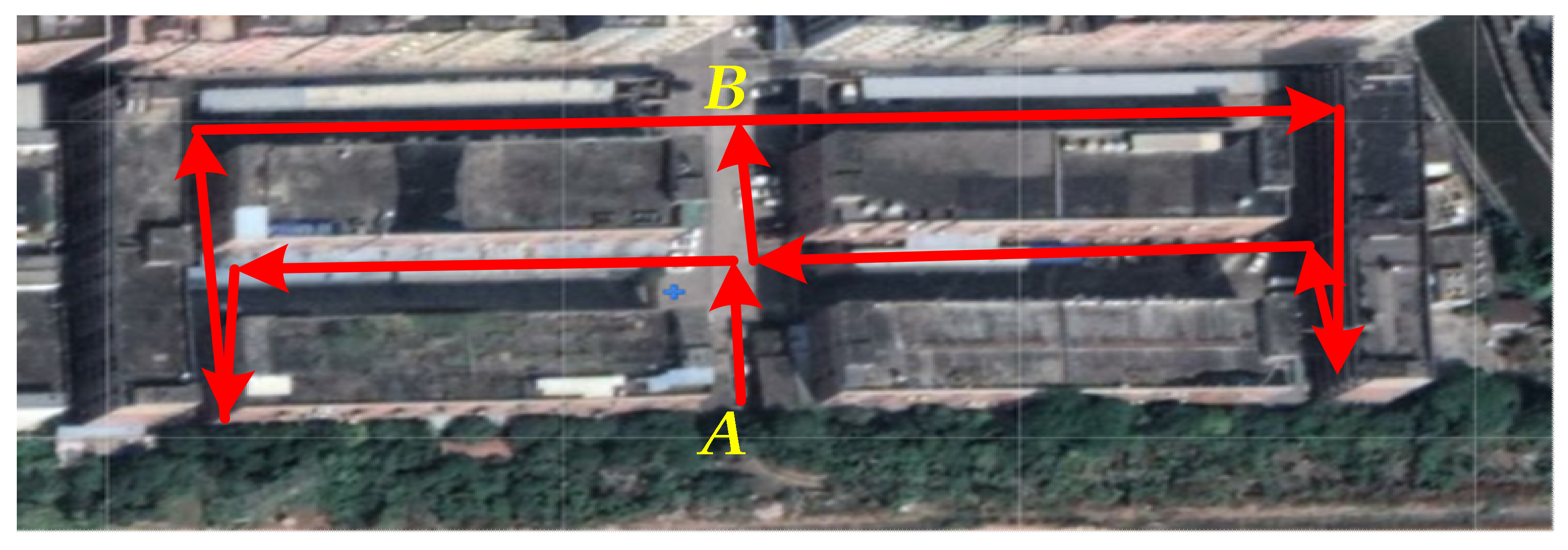
The experimental equipment was a backpack system integrating lidar, an inertial measurement unit (IMU), and an upper computer. The 16-line lidar was used to scan the environment and to return information about the position of the surface of the object. The IMU describes the attitude of the backpack system and feeds back information on the attitude change in the lidar. Each frame of the lidar and IMU data are matched using the robotic operating system (ROS) and fused into a complete point cloud. Finally, the upper computer uploads the PCD to a server through the wireless module and then transfers the data from the server to the client to achieve real-time monitoring. In this experiment, the system was used to model the community environment, as shown in
Figure 5. The basic structure of the backpack is shown in
Figure 6a, and about 170,000 points were obtained after system processing, as shown in
Figure 6b.
During measurement, we moved along the red line to collect the data. In order to ensure the integrity of the data, we planned the route so that everything could be scanned by the lidar. We took the equipment in the middle of the road and moved about five meters away from the wall. Then, we carried backpacks and moved on foot along the path. The whole process lasted about three minutes. Finally, we got the complete data. The edge of the data is the surface of the building. The point clouds outside the edges of the figure, and inside the two rectangular edges in the middle are indoor debris measured by lidar through the glass of the building. The debris is the main PCD noise. Vehicles, trees, and other objects on the ground can be considered sub-essential cloud noise depending on the situation. Next, we took this data as an example to verify the algorithm.
3.2. Our Experiment Results in a One-by-One Step
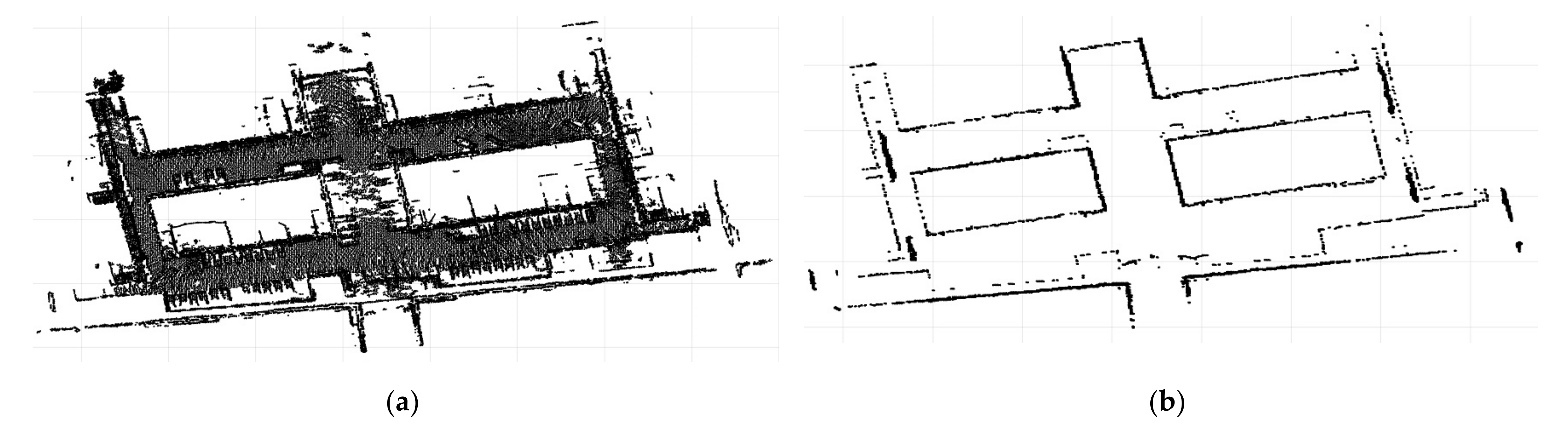
In order to verify the effectiveness of the algorithm, we evaluated the algorithm on indoor noise removal. In general, it was necessary to use a pass-through filter to crop the main PCD of the set for the initial data. Then, PCA was used to reduce the dimension of the point cloud. Generally, the first two columns of the dimensionality reduction matrix were selected to map the three-dimensional data to a two-dimensional plane that was close to the ground, as shown in
Figure 7a. It can be seen that the number of information points on the ground does not change significantly. The obvious increase in the number of points is the regular wall mapping the two-dimensional formation of linear points. Therefore, a grid is used to divide the points after dimensionality reduction based on the difference in mapping points between the ground and wall. The number of meshes divided was determined according to the size of the point cloud obtained. Usually, the mesh can contain a part of the line segment of the wall map. In this experiment, the number of grids was set to 400 and the whole two-dimensional map was divided into 160,000 rectangular grids. Next, a threshold was set to eliminate all points in the grid where the number of points was less than the threshold. According to the statistics of the number of points in all the grids, the intersecting boundary of points in the grids is about 12. Therefore,12 was taken as the segmentation threshold in this experiment, and all grid points in the grid for which the number was less than 12 were separated to obtain the mapping points of the ground and noise. The wall was made up of the remaining points. Then, the corresponding 3D point cloud was restored through the label index of the point. The ground and noise were used for further processing. The wall was retained and spliced into a complete point cloud with the finally separated ground.
GPCA can effectively remove sparse noise points in
Figure 7b. However, indoor noise tends to be as dense as or even denser than ground point clouds. If traditional filtering is used while increasing the intensity of filtering to remove high-density noise, some non-noise, such as part of the plane, is removed. By using GPCA, the high-density noise is removed by increasing the threshold value, and the point density of the wall is much higher than that of the ground and the noisy points after dimension reduction; therefore, the characteristics of the wall are better retained.
Since the ground point cloud and noise are eliminated simultaneously when GPCA is used, it is necessary to quickly extract the ground and to finish the wall splicing. In the remaining point clouds, only the ground has planarity and, thus, normal vector segmentation is used to quickly find the largest plane in the point cloud. In the algorithm, a SOR filter is used for data optimization. Then, a KD-tree is constructed on the point cloud to find the nearest neighbor points faster, and PCA is used to quickly fit the plane to obtain the normal vector of the corresponding point. In order to reduce the influence of edge noise when using a vector to segment the ground, the number of adjacent points used in this experiment was less than 20, and the included angle threshold of the normal vector was also smaller than 15 degrees. The results obtained only through normal vector segmentation are not ideal. The segmentation speed is fast, but the segmentation effect is very rough and even produces the phenomenon of overfitting. In order to improve the segmentation accuracy, the K nearest neighbor method was introduced as a constraint for further segmentation. We noted the category of the K nearest neighbor to the point, updated the category of the point to the category with the most points, and updated the next point. Thus, progressive point cloud fine segmentation was realized.
Before processing the noise, a SOR filter was used for preprocessing to facilitate segmentation and to achieve better results. The processed data are shown in
Figure 8a,b.
Figure 8a represents the wall point cloud after using GPCA, and
Figure 8b represents point clouds other than the wall. Then, the initial segmentation points and the remaining points were randomly selected to calculate the included angle of the normal vector, and those less than the threshold value were classified into one category. The same was performed for the remaining points until all of the points were sorted. This is an unsupervised segmentation, and the number of categories obtained depends on the size of the angle between the normal vector set. In the end, we divided the noise into nine categories, and the results are shown in
Figure 8c. It can be seen that the classification effect is not ideal, that the ground is roughly divided into two categories, and that the distribution of categories is disorderly. However, it can be found from the figure that the points occupying most of the ground are a class; therefore, the K nearest neighbor constraint was considered to centralize the class. It was also necessary to construct a KD-tree for the noise point cloud to quickly obtain the nearest neighbor points. The current point was updated based on the maximum category of the nearest neighbor points, and the updated effect is shown in
Figure 8d. It can be seen that most points on the ground were classified into one category at this time, while the ground points corresponded to the category with the largest number of points after classification. This category was used as ground points and wall point clouds joined together to obtain the final point cloud, shown in
Figure 8e.
3.3. Comparison with Other Methods
In order to verify the effectiveness of the algorithm, the proposed algorithm was used to compare the SOR filter, the VGSOR filter, the ROR filter, the Gaussian filter, and the DON filter. The algorithm was evaluated by processing the same data. The raw data are shown in
Figure 9a. The main indoor noise was removed manually, as shown in
Figure 9b. Noise marks were used to compare the effects of the filters. The results of SOR filtering are shown in
Figure 9c. The results of VGSOR filtering are shown in
Figure 9d. The result of ROR filtering is shown in
Figure 9e. The results of Gaussian filtering are shown in
Figure 9f. The results of DON filtering are shown in
Figure 9g. The results obtained from this experiment after the data were processed using the GPCA method are shown in
Figure 9h. The denoising degree and time complexity are very important to evaluate the performance of filters. We calculated the noise elimination rate and time complexity of these filters, as shown in
Table 1. The higher the noise elimination rate and the lower the time complexity, the better the filtering performance. Therefore, it can be seen that the GPCA method has an excellent effect on the processing of edge noise and can effectively remove block noise outside the plane. Based on the ratio of the edge noise removed by the filter to the original noise, the denoising accuracy of GPCA is better than that of the other filters. At the same time, our method also has low time complexity.
According to the denoising principle of the SOR filter, the average distance of KNN is used to determine whether it is an outlier. Therefore, the dispersion degree of a point cloud can be judged by the dispersion degree of the average distance of KNN. We calculated the average distance of KNN at each point after filtering, and these mean distances are counted, as shown in
Figure 10. In the figure, we calculated the standard deviation
, mean variation
, and range
as shown in
Table 1. The smaller the value of these parameters, the lower the degree of dispersion of the data. Therefore, these parameters can be used to evaluate the filter’s performance in removing outliers. Then, the cumulative distribution function of average distance was used to compare each filter intuitively, as shown in
Figure 11. According to these parameters, we determined that after the data were processed by our method, the degree of dispersion of the data is slightly lower than the SOR filter and higher than other filters.
4. Discussion
In
Figure 9, we took the data after manually removing most of the out-of-plane noise as the standard. Through a comparison of several filtering results, we showed that our method is better than other filtering methods at removing noise outside the plane. However, while removing noise, features of objects outside the plane, such as cars and trees, can also be lost. Therefore, our method is suitable for the three-dimensional modeling of buildings. This method can reduce the modeling error caused by a block of trees and other objects in 3D modeling. At the same time, our method also has some advantages in terms of time complexity.
The degree of dispersion of point cloud data can also be used as one of the indicators in evaluating the quality of filtering. Therefore, we used the principle of the SOR filter to obtain the statistics on the average distance of KNN. The dispersion degree of point cloud data after filtering was judged by analyzing the dispersion degree of statistical data. As shown in
Figure 10, the statistical data of eight types of data were compared, and the indicators of each type of data were calculated. The smaller the values of the three indicators, the lower the degree of dispersion of the data.
Figure 11 is the cumulative probability distribution of the statistical data. When the value of the cumulative distribution function changes from 0 to 1, the faster the abscissa changes, the lower the degree of dispersion of the data. The SOR filter is designed based on the dispersion of data. Therefore, our method is slightly worse than the SOR filter but higher than other filters in terms of the dispersion of the data.
Through an analysis of the degree of data dispersion, as shown in
Table 1, it can be seen that our method is slightly lower than the SOR filter in three indicators and higher than other filters. The reason for this is that when the laser radar scans the upper end of the building, the angle between the laser and the plane is too small and, thus, the points there are very sparse. The SOR filter filters it, but our method preserves the point as a plane. If we need to eliminate this point, we simply apply SOR filtering on the basis of our method.
Overall, from the point of view of the denoising degree, time complexity, and discrete degree of processed data, our proposed method is superior to other types of filtering in general.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}