
Experimental Strain Measurement Approach Using Fiber Bragg Grating Sensors for Monitoring of Railway Switches and Crossings




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Railway Switches and Crossings Monitoring
1.2. FBG Sensors Solution
2. Methods and Measurement
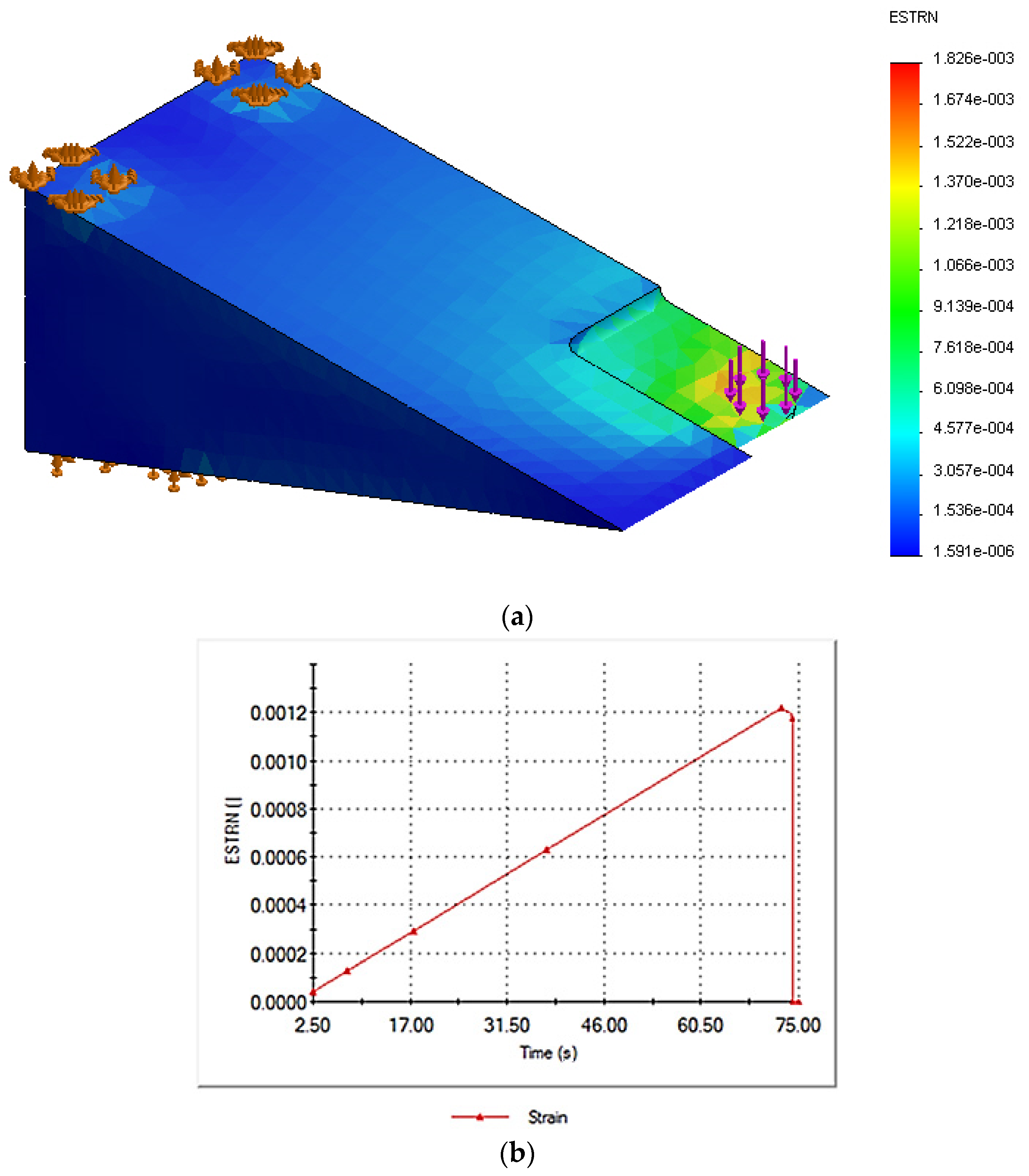
2.1. Simulation Study
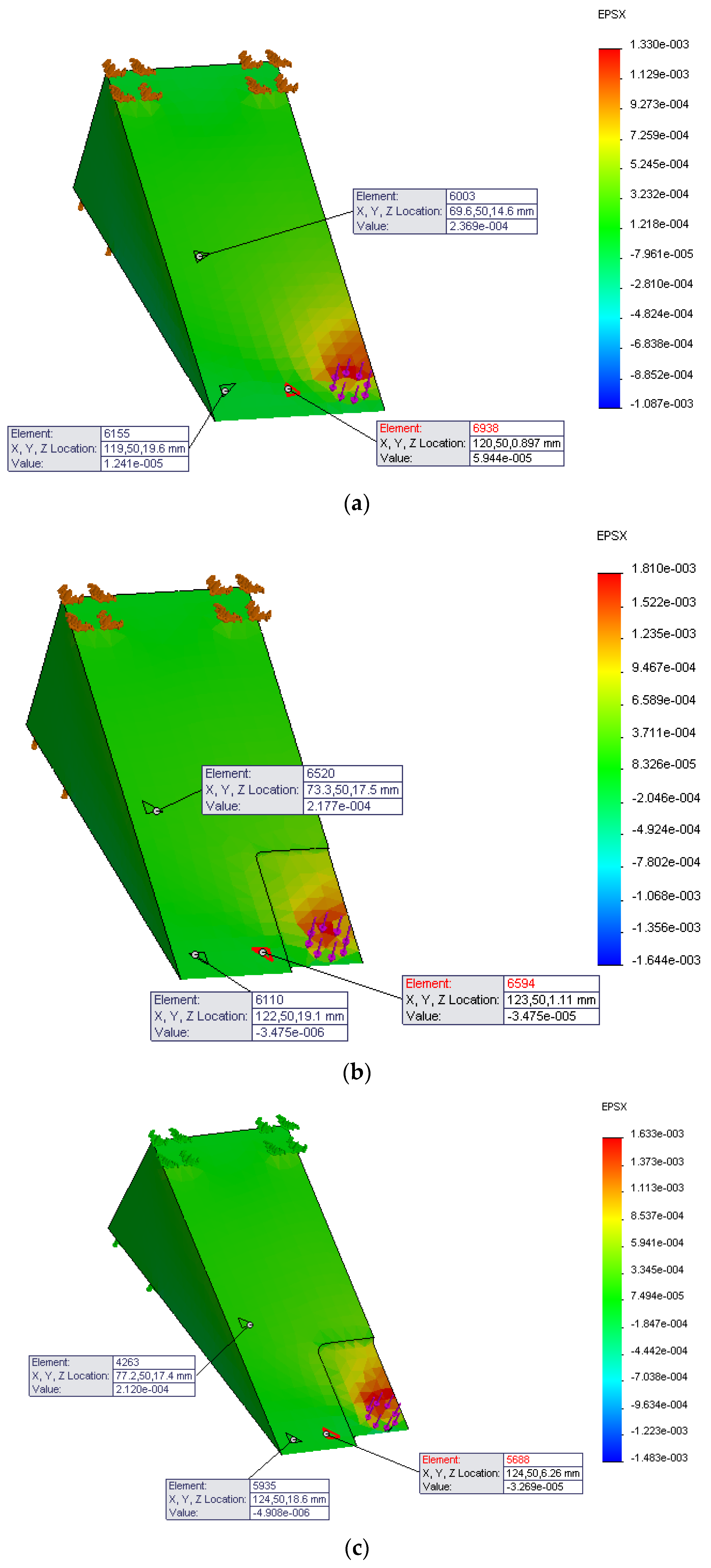
2.2. Simulation the Wear with 1 mm and 2 mm Depth Swept Cut
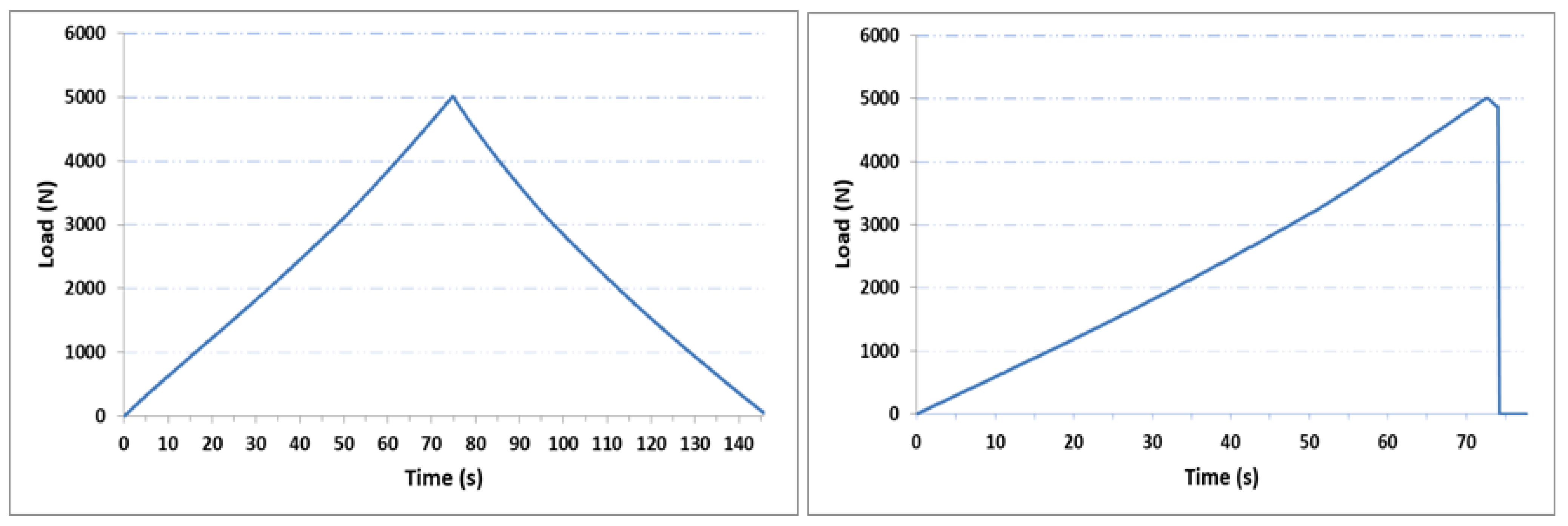
2.3. Experimental Linear Loading Tests
3. Results and Discussion
3.1. Analytical Modeling of the Effect of Cut
3.2. Experimental Strain Measurement
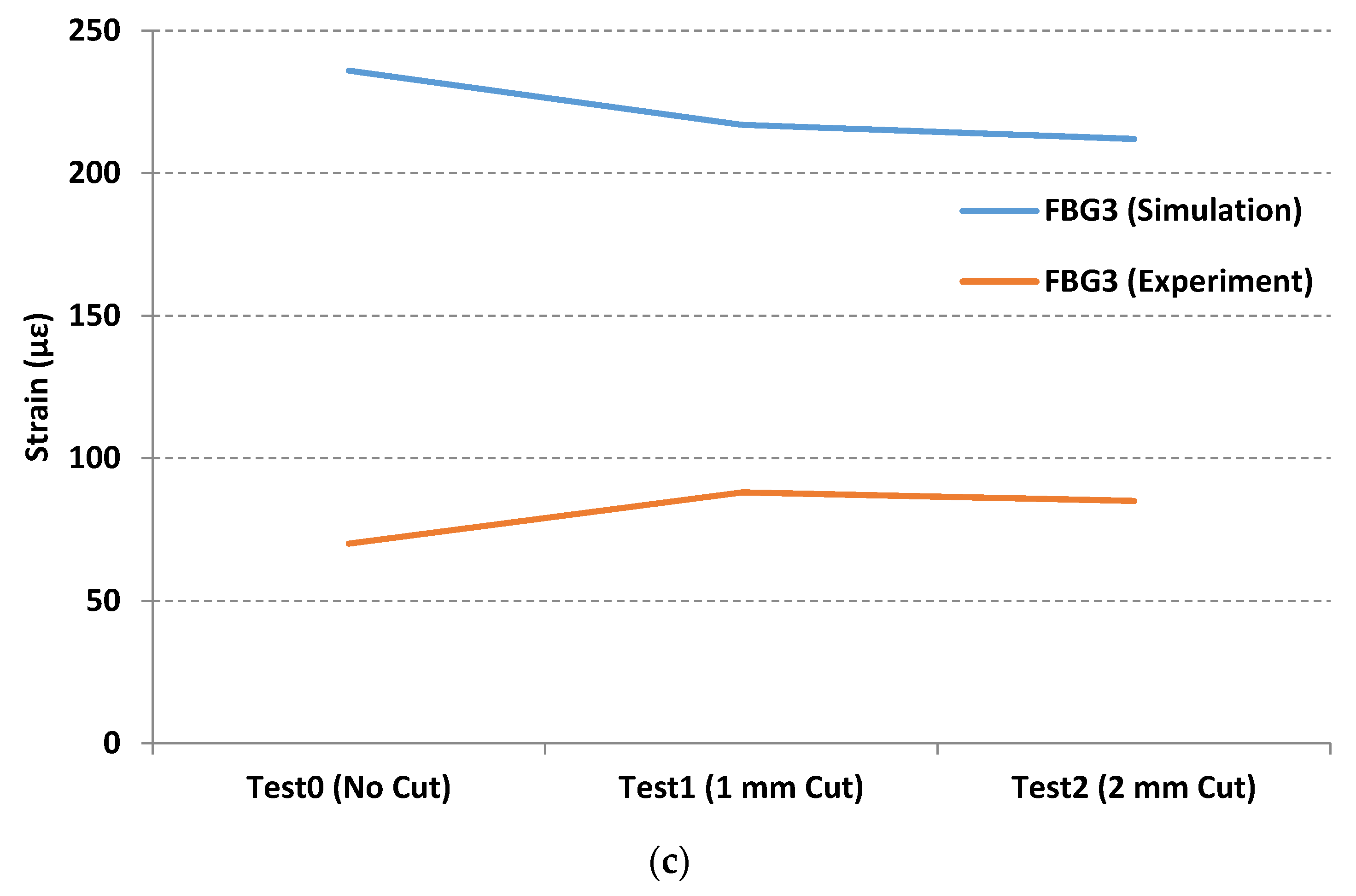
3.3. Comparison between Modeling and Experimental Strain Measurements
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Soleimani, H.; Moavenian, M. Tribological Aspects of Wheel–Rail Contact: A Review of Wear Mechanisms and Effective Factors on Rolling Contact Fatigue. Urban Rail Transit 2017, 3, 227–237. [Google Scholar] [CrossRef]
- Gareth, D.; Martin, C. Limits for Acceptable Use of Worn Rails on UK Standard Gauge Heritage Railways. In Proceedings of the 12th International Railway Engineering Conference and Exhibition, London, UK, 10–11 July 2013. [Google Scholar]
- De Arizon, J.; Verlinden, O.; Dehombreux, P. Prediction of wheel wear in urban railway transport: Comparison of existing models. Veh. Syst. Dyn. 2007, 45, 849–866. [Google Scholar] [CrossRef]
- “Operational Failure Modes of Switches and Crossings”. Public Deliverable D 1.3.1, Date: 5 May 2015. Available online: http://www.capacity4rail.eu/IMG/pdf/c4r_-_d131_-_operational_failure_modes_of_scs_public_.pdf (accessed on 17 May 2021).
- Nissen, A. LCC-Analysis for Switches and Crossings—A Case Study from the Swedish Railway Network. Int. J. COMADEM 2009, 12, 10–19. [Google Scholar]
- Rail Accident Investigation Branch. Rail Accident Report: Derailment at Grayrigg, 23 February 2007: Rail Accident Investigation Branch, Report No: 20/2008; Department for Transport: Derby, UK, 2009.
- Liu, X.; Markine, V.L.; Wang, H.; Shevtsov, I.Y. Experimental tools for railway crossing condition monitoring (crossing condition monitoring tools). Measurement 2018, 129, 424–435. [Google Scholar] [CrossRef]
- Zwanenburg, W.J. The Swiss experience on the wear of railway switches & crossings. In Proceedings of the 7th Swiss Transport Research Conference, Monte Verità/Ascona, Switzerland, 12–14 September 2007. [Google Scholar]
- Bayer, R.G. Mechanical Wear Prediction and Prevention, 1st ed.; Marcel Dekker: New York, NY, USA, 1994. [Google Scholar]
- Hiensch, E.J.M.; Burgelman, N. Switch Panel wear loading—A parametric study regarding governing train operational factors. Veh. Syst. Dyn. 2017, 55, 1384–1404. [Google Scholar] [CrossRef]
- Hamadache, M.; Dutta, S.; Olaby, O.; Ambur, R.; Stewart, E.; Dixon, R. On the Fault Detection and Diagnosis of Railway Switch and Crossing Systems: An Overview. Appl. Sci. 2019, 9, 5129. [Google Scholar] [CrossRef]
- Boutle, N.F. A Fatigue-Orientated Analysis of Strains Measured from Two Crossings of Different Design Installed at Watford Junction: British Railways Board, British Railways Research and Development Division—Track Group, Report No: 263-190-16; UK, 1978. Available online: https://www.sparkrail.org/Lists/Records/DispForm.aspx?ID=16299 (accessed on 17 May 2021).
- Groom, G.M. Strain Gauge Survey of the E.C.M.L. Newark High Speed Square Crossing, British Railways Research (BRR)—Track Group, Report No: 263-202-9; UK, 1973. Available online: https://www.sparkrail.org/Lists/Records/DispForm.aspx?ID=16520 (accessed on 17 May 2021).
- Oßberger, U.; Kollmentb, W.; Eckc, S. Insights towards Condition Monitoring of Fixed Railway Crossings. In Proceedings of the ESIS TC24 Workshop “Integrity of Railway Structures, Leoben, Austria, 24–25 October 2016; pp. 106–114. [Google Scholar]
- Andreassen, R.; Nilsen, R. Norut Narvik Strain Gauge Measurements on the Check Rail System of Railway Switches. 12 April 2019. Available online: https://arinka.eu/news-events/strain-gauge-measurements-on-the-check-rail-system-of-heavy-haul-railway-switches/ (accessed on 17 May 2021).
- Du, C.; Dutta, S.; Kurup, P.; Yu, T.; Wang, X. A review of railway infrastructure monitoring using fiber optic sensors. Sens. Actuators A Phys. 2020, 303, 111728. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, M.; Dai, D. Design Rule of Mach-Zehnder Interferometer Sensors for Ultra-High Sensitivity. Sensors 2020, 20, 2640. [Google Scholar] [CrossRef]
- Nedoma, J.; Fajkus, M.; Martinek, R.; Witas, K.; Mec, P.; jan Jargus; Hejduk, S.; Zavodny, P.; Vasinek, V. Sensor system based on the Mach-Zehnder interferometer for the rail transport. In Proceedings of the SPIE 10654, Fiber Optic Sensors and Applications XV, Orlando, FL, USA, 14 May 2018. 106541G. [Google Scholar] [CrossRef]
- Han, Y.-G. Investigation of temperature sensitivity of a polymer-overlaid microfiber Mach-Zehnder interferometer. Sensors 2017, 17, 2403. [Google Scholar] [CrossRef] [PubMed]
- Boffi, P.; Cattaneo, G.; Amoriello, L.; Barberis, A.; Bucca, G.; Bocciolone, M.F.; Collina, A.; Martinelli, M. Optical Fiber Sensors to Measure Collector Performance in the Pantograph-Catenary Interaction. IEEE Sens. J. 2009, 9, 635–640. [Google Scholar] [CrossRef]
- Yu, B.; Kim, D.W.; Deng, J.; Xiao, H.; Wang, A. Fiber Fabry-Perot sensors for detection of partial discharges in power transformers. Appl. Opt. 2003, 42, 3241–3250. [Google Scholar] [CrossRef] [PubMed]
- Martincek, I.; Kacik, D.; Horak, J. Interferometric optical fiber sensor for monitoring of dynamic railway traffic. Opt. Laser Technol. 2021, 140, 107069. [Google Scholar] [CrossRef]
- Wu, T.; Liu, G.; Fu, S.; Xing, F. Recent Progress of Fiber-Optic Sensors for the Structural Health Monitoring of Civil Infrastructure. Sensors 2020, 20, 4517. [Google Scholar] [CrossRef] [PubMed]
- López-Higuera, J.M.; Cobo, L.R.; Incera, A.Q.; Cobo, A. Fiber Optic Sensors in Structural Health Monitoring. J. Lightwave Technol. 2011, 29, 587–608. [Google Scholar] [CrossRef]
- Wiesmeyr, C.; Litzenberger, M.; Waser, M.; Papp, A.; Garn, H.; Neunteufel, G.; Döller, H. Real-Time Train Tracking from Distributed Acoustic Sensing Data. Appl. Sci. 2020, 10, 448. [Google Scholar] [CrossRef]
- Petcher, A.; Potter, M.D.G.; Dixon, S. A new electromagnetic acoustic transducer (EMAT) design for operation on rail. NDT E-Int. 2014, 65, 1–7. [Google Scholar] [CrossRef]
- Min, Y.; Xiao, B.; Dang, J.; Yue, B.; Cheng, T. Real time detection system for rail surface defects based on machine vision. J. Image Video Proc. 2018, 3. [Google Scholar] [CrossRef]
- Lee, K.Y.; Lee, K.K.; Ho, S.L. Exploration of using FBG sensor for derailment detector. WSEAS Trans. Top. Syst. 2004, 3, 2433–2439. [Google Scholar]
- Filograno, M.L.; Corredera, P.; Rodriguez-Plaza, M.; Andres-Alguacil, A.; González-Herráez, M. Wheel Flat Detection in High-Speed Railway Systems Using Fiber Bragg Gratings. IEEE Sens. J. 2013, 13, 4808–4816. [Google Scholar] [CrossRef]
- Roveri, N.; Carcaterra, A.; Sestieri, A. Real-time monitoring of railway infrastructures using fibre Bragg grating sensors. Mech. Syst. Signal Process. 2015, 60–61, 14–28. [Google Scholar] [CrossRef]
- Briscoe, B.J.; Chateauminois, A. Measurements of frictioninduced surface strains in a steel/polymer contact. Tribol. Int. 2002, 35, 245–254. [Google Scholar] [CrossRef]
- Simandjuntak, S.; Alizadeh, H.; Pavier, M.J.; Smith, D.J. Fatigue crack closure of a corner crack: A comparison of experimental results with finite element predictions. Int. J. Fatigue 2005, 27, 914–919. [Google Scholar] [CrossRef]
- Kanehara, H.; Fujioka, T. Measuring rail/wheel contact points of running railway vehicles. Wear 2002, 253, 275–283. [Google Scholar] [CrossRef]
- Solidworks Help, Strain Components. 2021. Available online: https://help.solidworks.com/2017/english/SolidWorks/cworks/c_Strain_Components_2.htm (accessed on 17 May 2021).


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kerrouche, A.; Najeh, T.; Jaen-Sola, P. Experimental Strain Measurement Approach Using Fiber Bragg Grating Sensors for Monitoring of Railway Switches and Crossings. Sensors 2021, 21, 3639. https://doi.org/10.3390/s21113639
Kerrouche A, Najeh T, Jaen-Sola P. Experimental Strain Measurement Approach Using Fiber Bragg Grating Sensors for Monitoring of Railway Switches and Crossings. Sensors. 2021; 21(11):3639. https://doi.org/10.3390/s21113639
Chicago/Turabian StyleKerrouche, Abdelfateh, Taoufik Najeh, and Pablo Jaen-Sola. 2021. "Experimental Strain Measurement Approach Using Fiber Bragg Grating Sensors for Monitoring of Railway Switches and Crossings" Sensors 21, no. 11: 3639. https://doi.org/10.3390/s21113639
APA StyleKerrouche, A., Najeh, T., & Jaen-Sola, P. (2021). Experimental Strain Measurement Approach Using Fiber Bragg Grating Sensors for Monitoring of Railway Switches and Crossings. Sensors, 21(11), 3639. https://doi.org/10.3390/s21113639