
Absolute Displacement-Based Formulation for Peak Inter-Story Drift Identification of Shear Structures Using Only One Accelerometer †

Abstract
1. Introduction
2. Formulation of Proposed Method
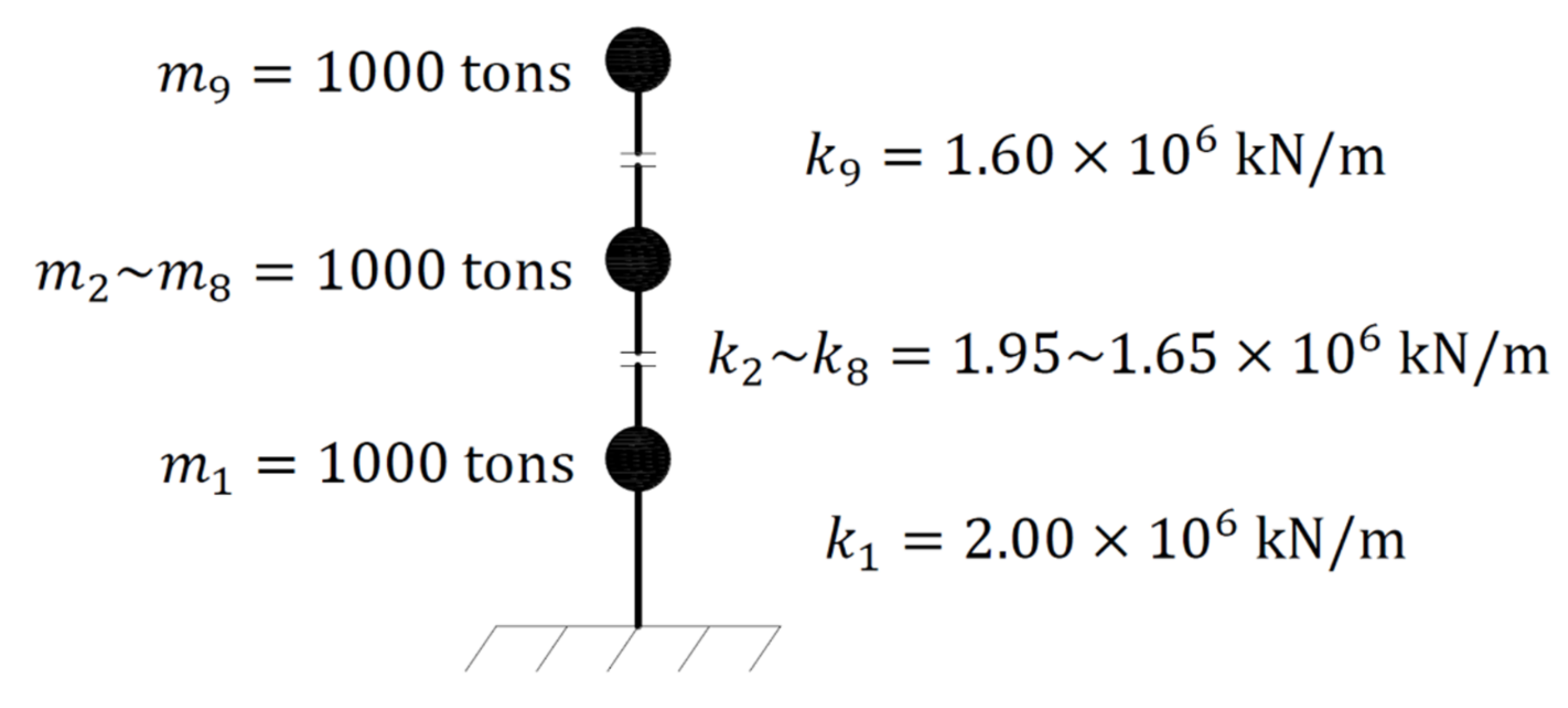
3. Numerical Simulation
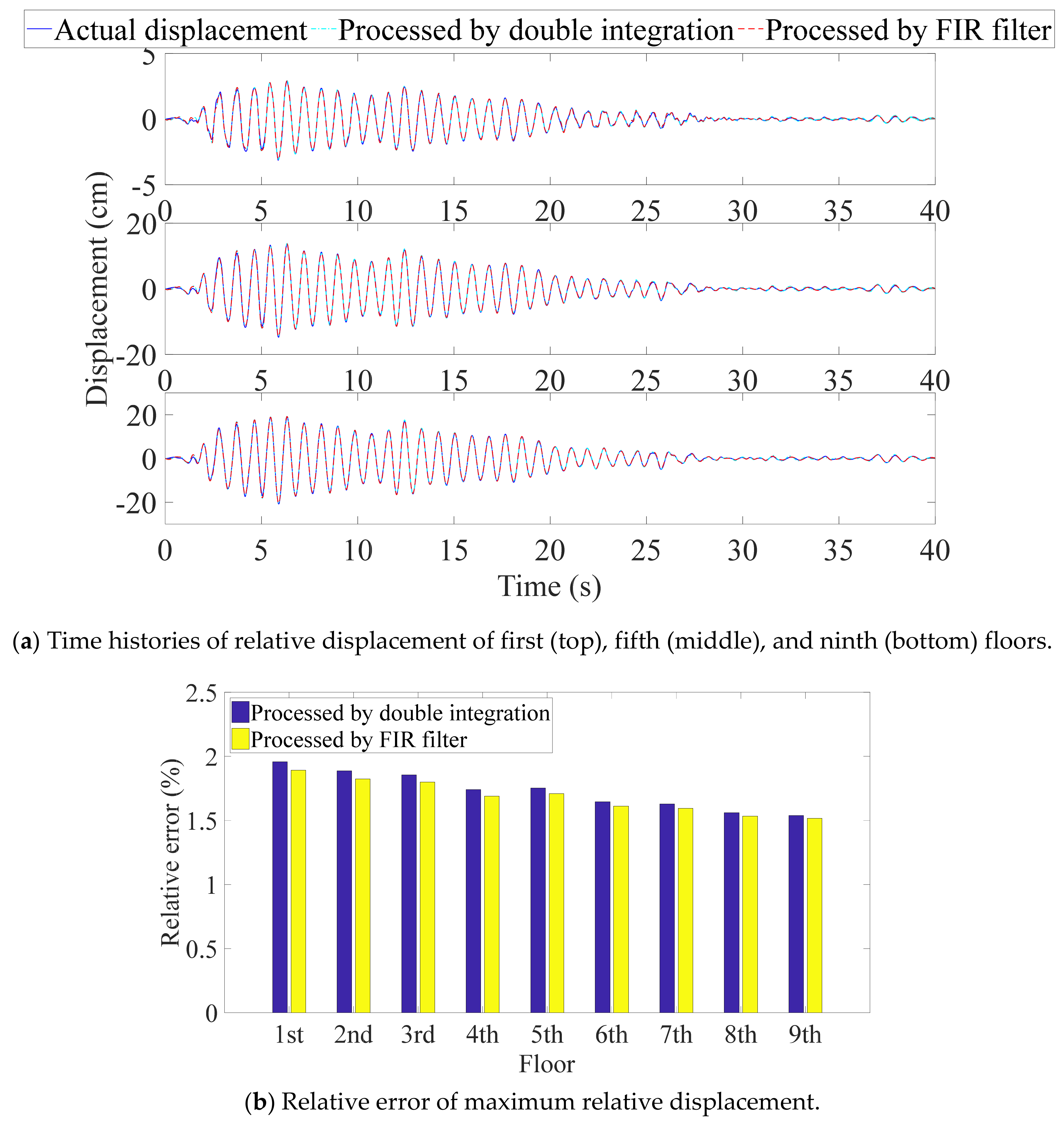
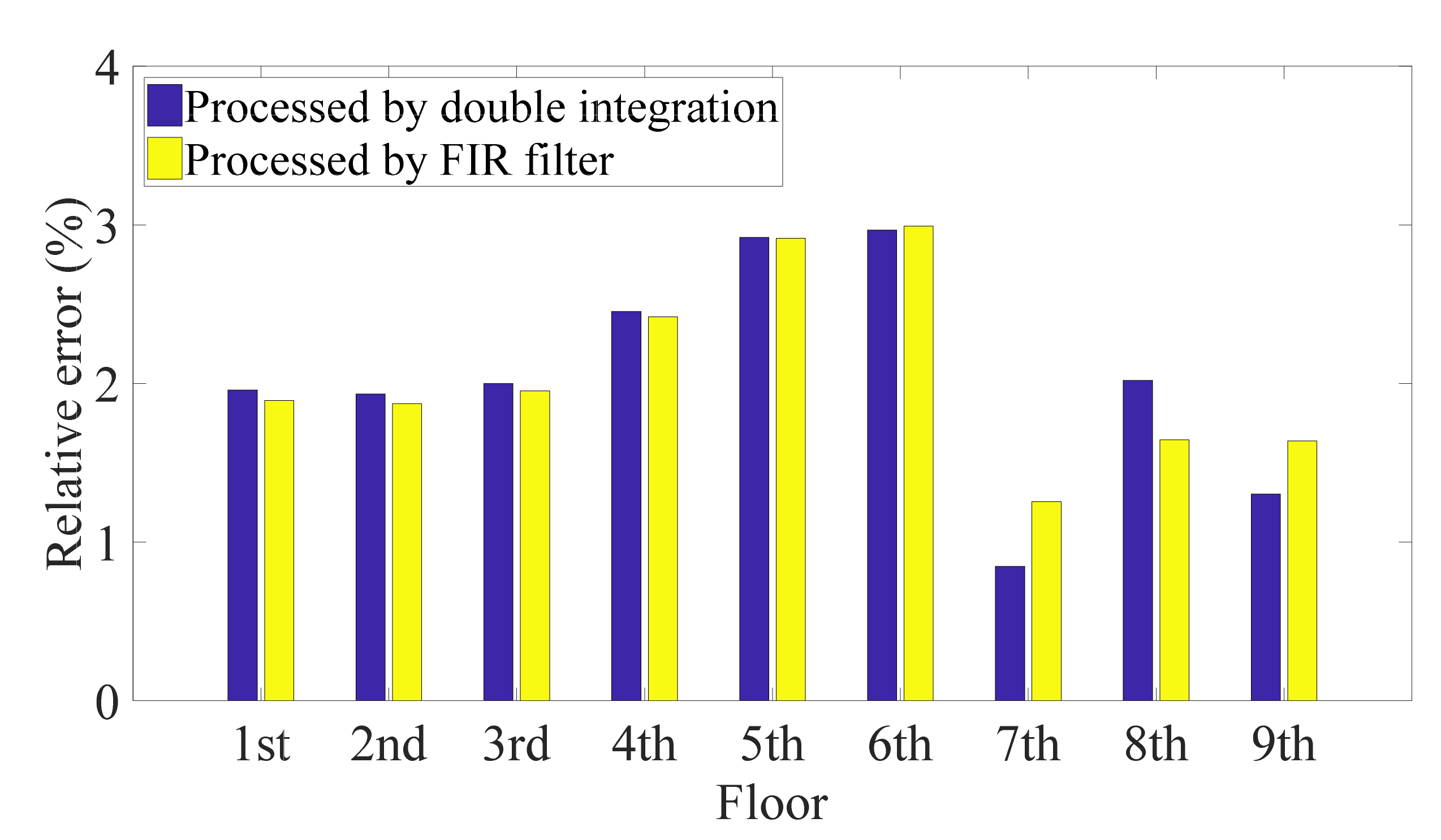
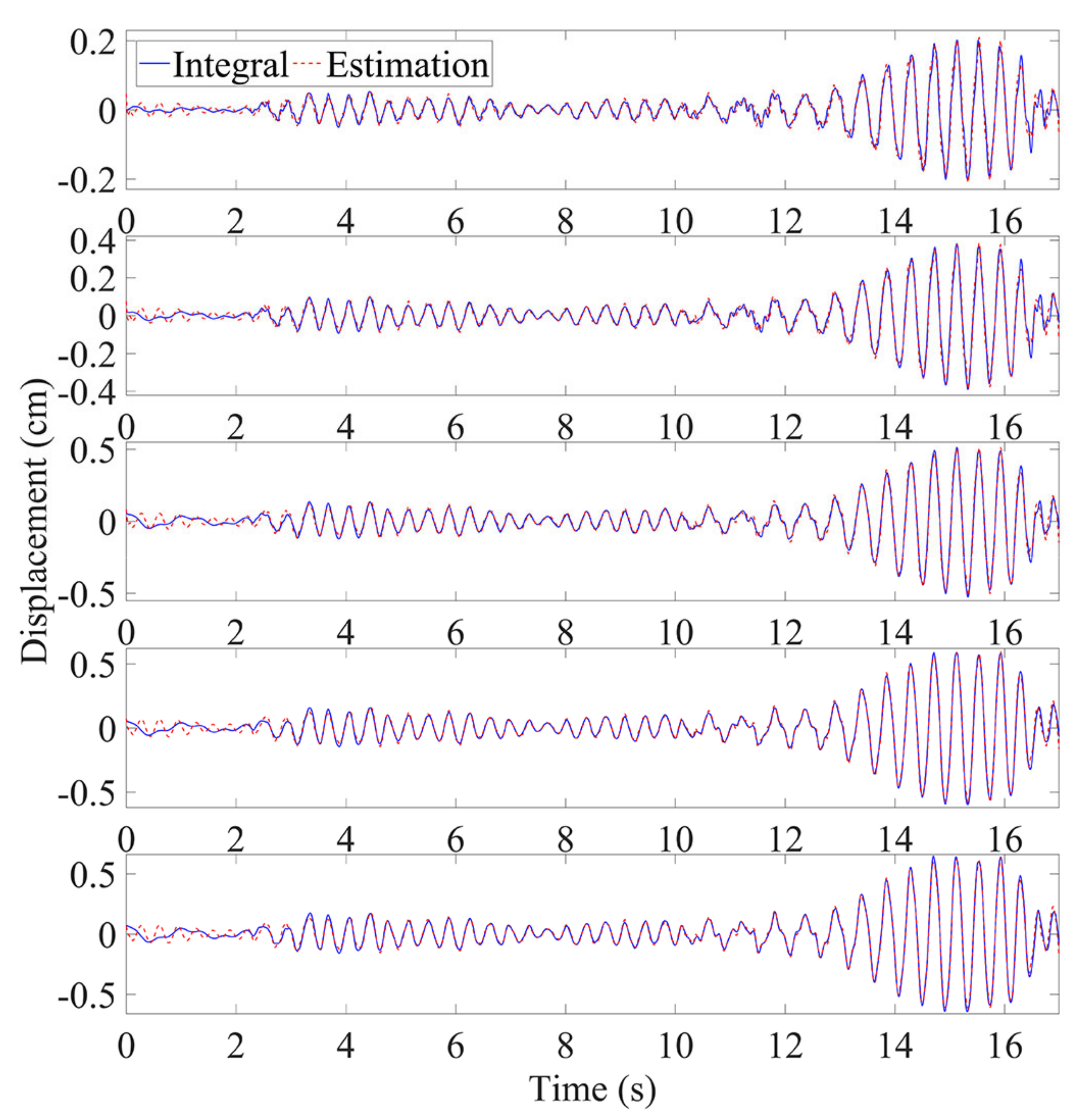
3.1. Results of Proposed Method
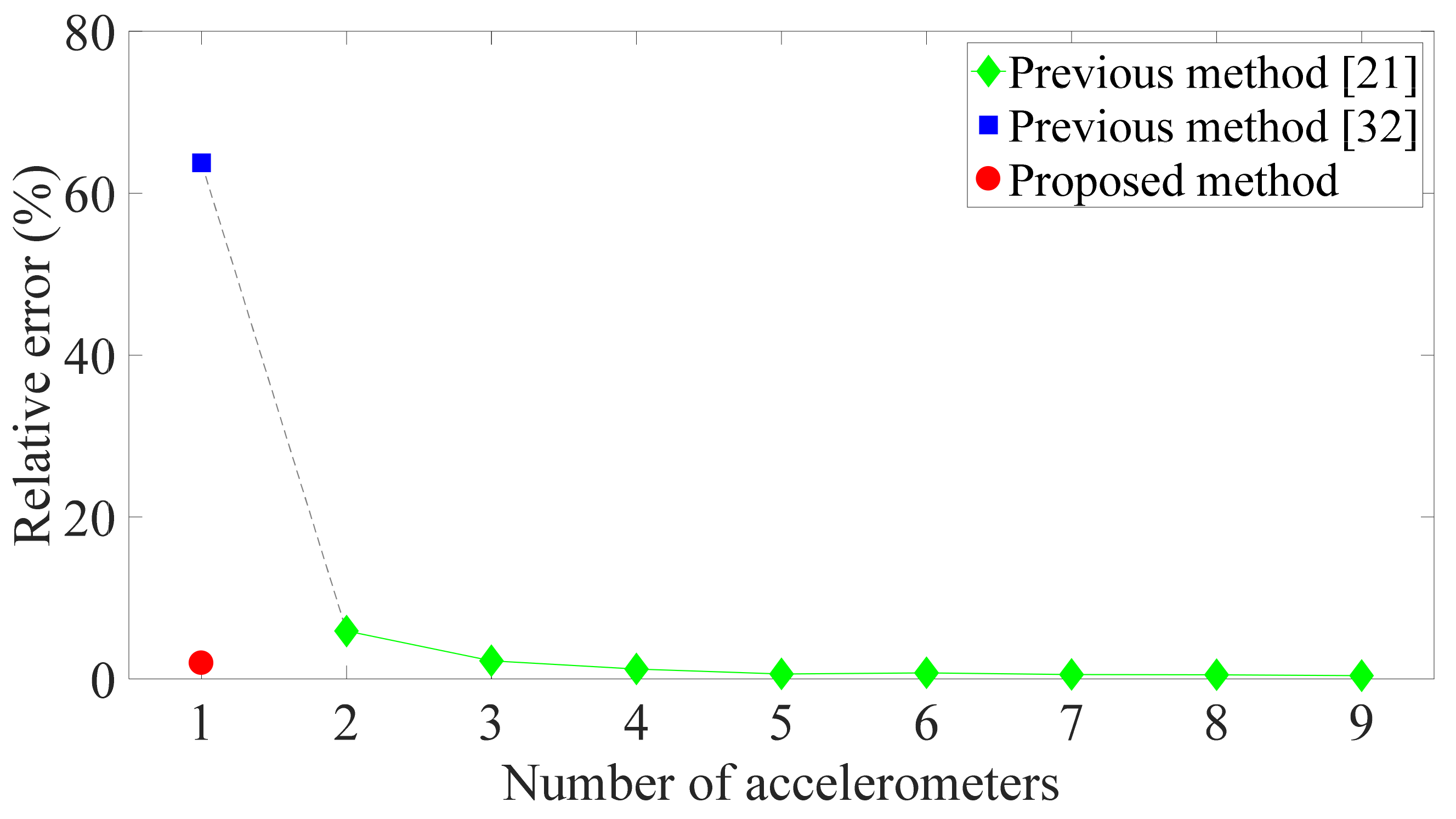
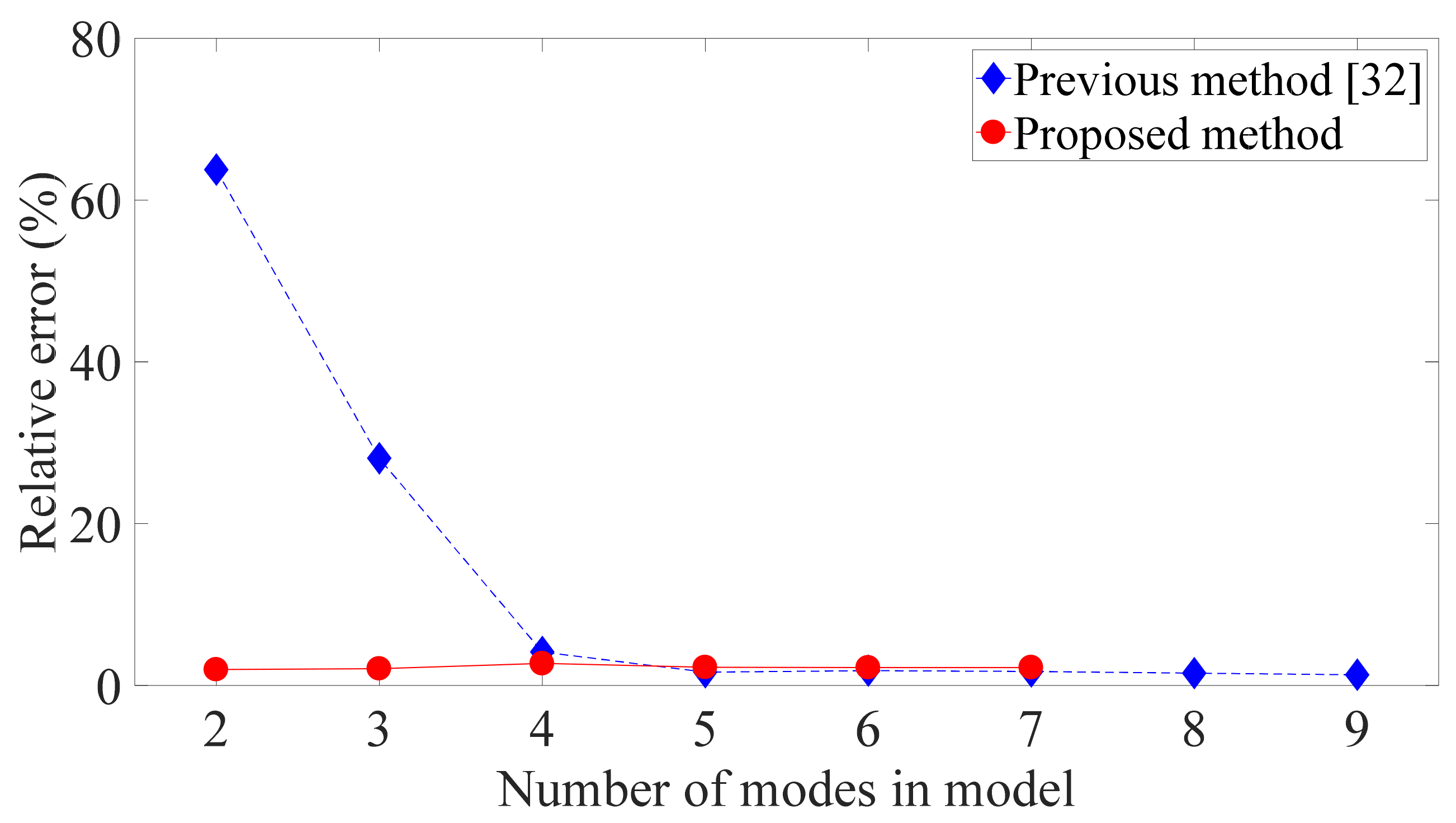
3.2. Comparison with Previous Research and Analysis of the Contribution of High Modes
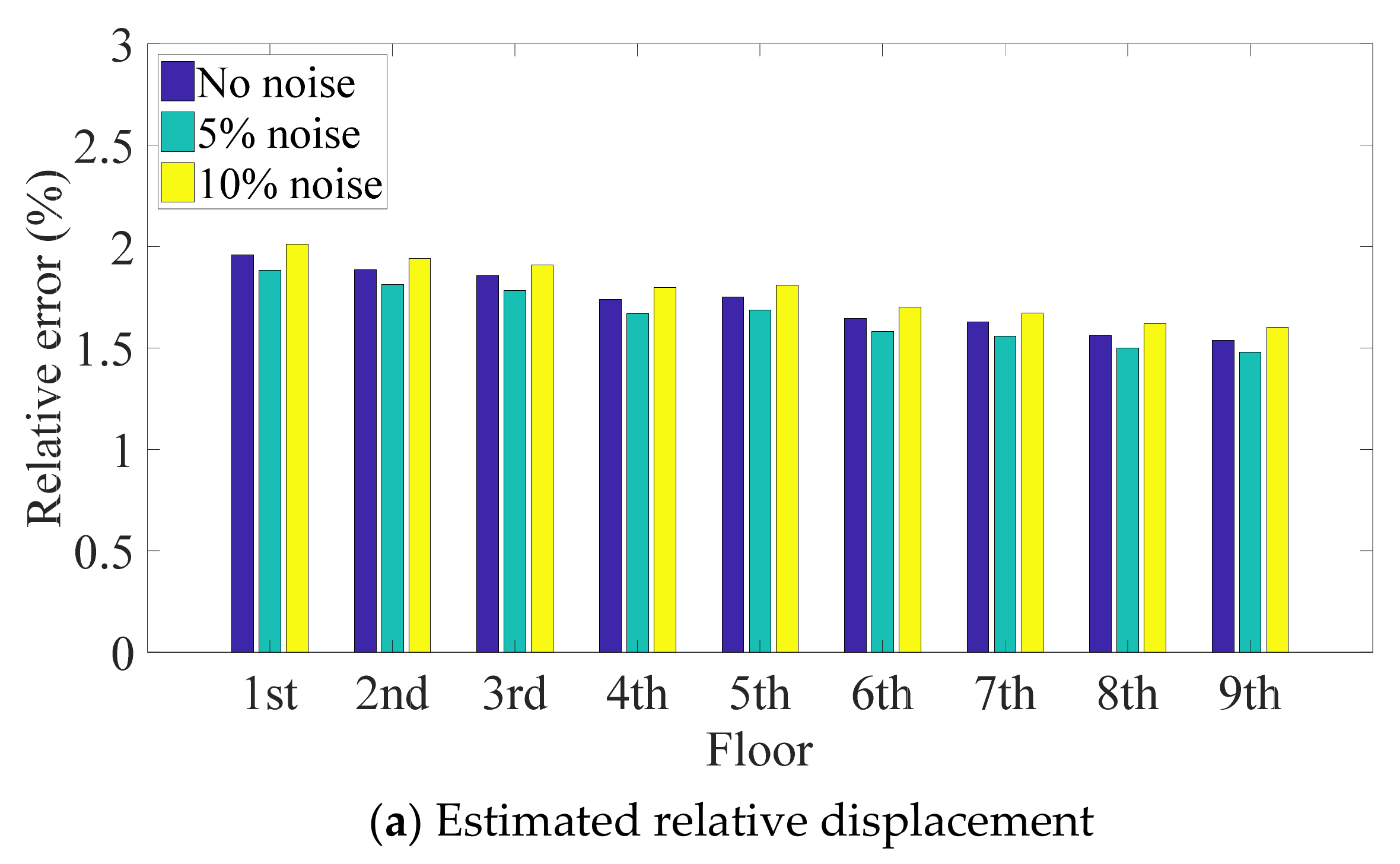
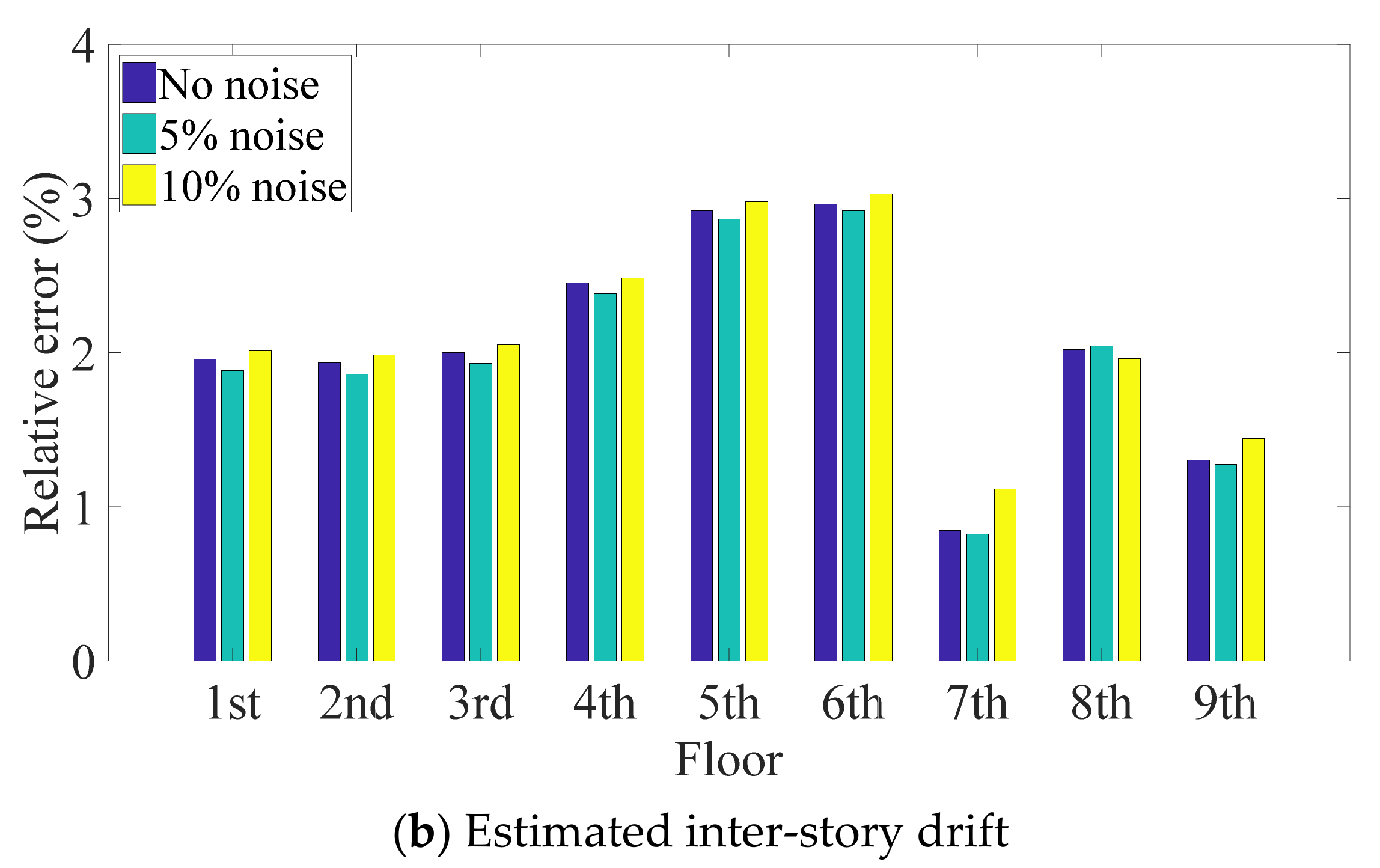
3.3. Discussion of Environmental Noise
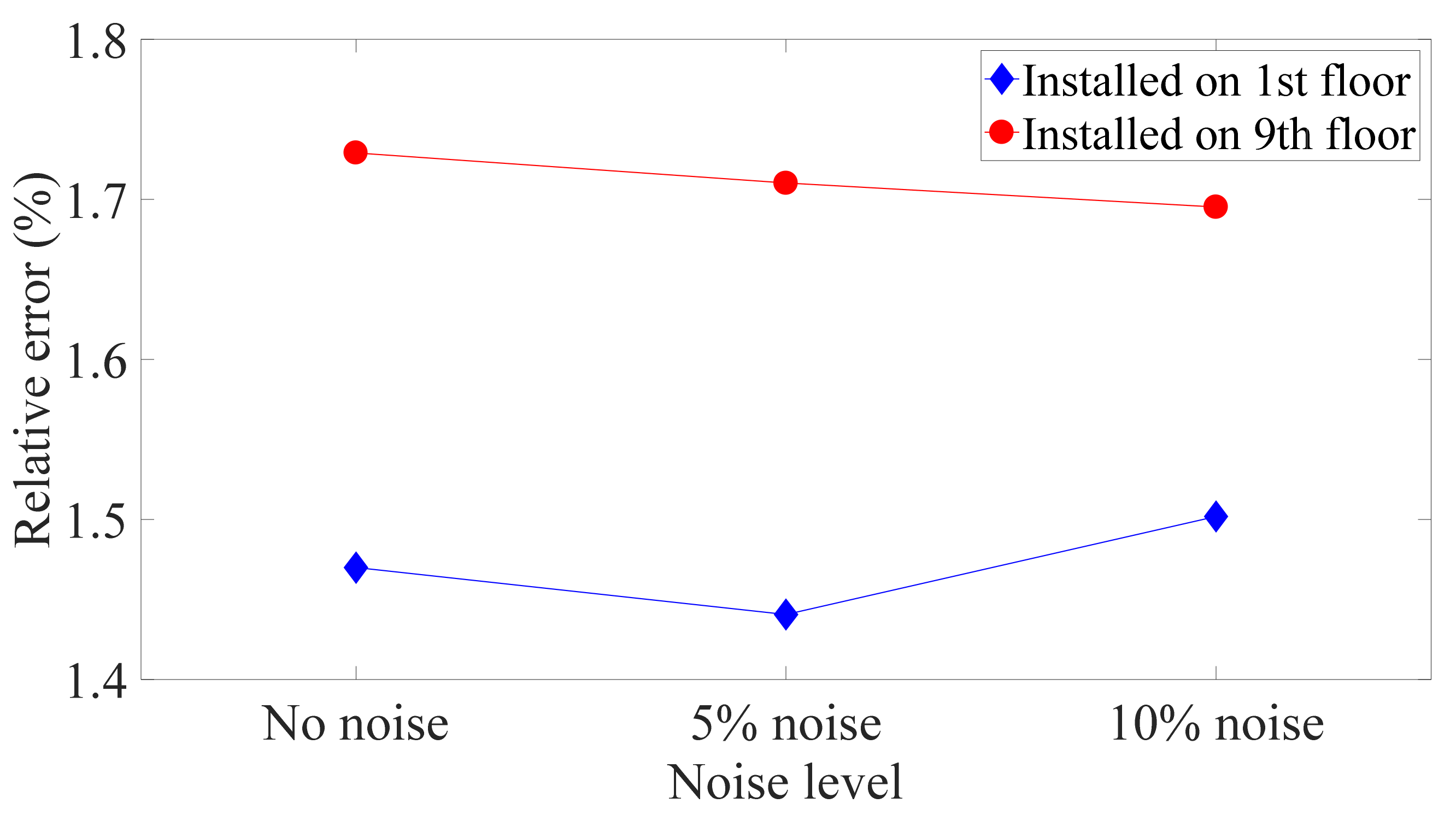
3.4. Discussion of Installation Location of Accelerometer
4. Experimental Verification
4.1. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Mita, A. Structural Dynamics for Health Monitoring; Sankeisha: Nagoya, Japan, 2003. [Google Scholar]
- Kuleli, M.; Nagayama, T. A Robust Structural Parameter Estimation Method Using Seismic Response Measurements. Struct. Control. Heal. Monit. 2020, 27, e2475. [Google Scholar] [CrossRef]
- Sun, L.; Li, Y.; Zhu, W.; Zhang, W. Structural Response Reconstruction in Physical Coordinate from Deficient Measurements. Eng. Struct. 2020, 212, 110484. [Google Scholar] [CrossRef]
- Sanchez, J.; Benaroya, H. Review of Force Reconstruction Techniques. J. Sound Vib. 2014, 333, 2999–3018. [Google Scholar] [CrossRef]
- Kasai, K.; Mita, A.; Kitamura, H.; Matsuda, K.; Morgan, T.A.; Taylor, A.W. Performance of Seismic Protection Technologies during the 2011 Tohoku-Oki Earthquake. Earthq. Spectra 2013, 29, S265–S293. [Google Scholar] [CrossRef]
- Dan, M.; Ishizawa, Y.; Tanaka, S.; Nakahara, S.; Wakayama, S.; Kohiyama, M. Vibration Characteristics Change of a Base-Isolated Building with Semi-Active Dampers Before, During, and After the 2011 Great East Japan Earthquake. Earthquakes Struct. 2015, 8, 889–913. [Google Scholar] [CrossRef]
- Siringoringo, D.M.; Fujino, Y. Seismic Response Analyses of an Asymmetric Base-Isolated Building During the 2011 Great East Japan (Tohoku) Earthquake. Struct. Control. Health Monit. 2015, 22, 71–90. [Google Scholar] [CrossRef]
- Tong, Y.; Xie, L.; Xue, S.; Tang, H. Performance of a Passively-Controlled Steel Building before and after the 2011 Great East Japan Earthquake. In Proceedings of the 11th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 12–14 September 2017. [Google Scholar] [CrossRef]
- Brewick, P.T.; Johnson, E.A.; Sato, E.; Sasaki, T. Constructing and Evaluating Generalized Models for a Base-Isolated Structure. Struct. Control. Health Monit. 2018, 25, e2243. [Google Scholar] [CrossRef]
- Casciati, F.; Wu, L. Local Positioning Accuracy of Laser Sensors for Structural Health Monitoring. Struct. Control. Health Monit. 2013, 20, 728–739. [Google Scholar] [CrossRef]
- Guo, J.; Xiang, Y.; Fujita, K.; Takewaki, I. Vision-Based Building Seismic Displacement Measurement by Stratification of Projective Rectification Using Lines. Sensors 2020, 20, 5775. [Google Scholar] [CrossRef]
- Antoniou, A. Digital Filters; McGraw Hill: New York, NY, USA, 1993. [Google Scholar]
- Gomez, F.; Park, J.W.; Spencer, B.F., Jr. Reference-Free Structural Dynamic Displacement Estimation Method. Struct. Control. Health Monit. 2018, 25, e2209. [Google Scholar] [CrossRef]
- Lee, H.S.; Hong, Y.H.; Park, H.W. Design of an FIR Filter for the Displacement Reconstruction Using Measured Acceleration in Low-Frequency Dominant Structures. Int. J. Numer. Methods Eng. 2010, 82, 403–434. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Y.; Verriest, E.I. Simultaneous Input-State Estimation with Direct Feedthrough Based on a Unifying MMSE Framework with Experimental Validation. Mech. Syst. Signal. Process. 2021, 147, 107083. [Google Scholar] [CrossRef]
- Valikhani, M.; Younesian, D. Bayesian Framework for Simultaneous Input/State Estimation in Structural and Mechanical Systems. Struct. Control. Health Monit. 2019, 26, e2379. [Google Scholar] [CrossRef]
- Zhao, X.; Xu, Y.L.; Li, J.; Chen, J. Hybrid Identification Method for Multi-Story Buildings with Unknown Ground Motion: Theory. J. Sound Vib. 2006, 291, 215–239. [Google Scholar] [CrossRef]
- Zhao, X.; Xu, Y.L.; Chen, J.; Li, J. Hybrid Identification Method for Multi-Story Buildings with Unknown Ground Motion: Experimental Investigation. Eng. Struct. 2005, 27, 1234–1247. [Google Scholar] [CrossRef]
- Lei, Y.; Liu, C.; Liu, L.J. Identification of Multistory shear buildings under Unknown Earthquake Excitation Using Partial Output Measurements: Numerical and Experimental Studies. Struct. Control. Health Monit. 2014, 21, 774–783. [Google Scholar] [CrossRef]
- Lei, Y.; He, M.; Liu, C.; Lin, S.Z. Identification of Tall Shear Buildings under Unknown Seismic Excitation with Limited Output Measurements. Adv. Struct. Eng. 2013, 16, 1839–1849. [Google Scholar] [CrossRef]
- Li, Y.; Luo, Y.; Wan, H.P.; Yun, C.B.; Shen, Y. Identification of Earthquake Ground Motion Based on Limited Acceleration Measurements of Structure Using Kalman Filtering Technique. Struct. Control. Health Monit. 2020, 27, e2464. [Google Scholar] [CrossRef]
- Huang, J.; Rao, Y.; Qiu, H.; Lei, Y. Generalized Algorithms for the Identification of Seismic Ground Excitations to Building Structures Based on Generalized Kalman Filtering under Unknown Input. Adv. Struct. Eng. 2020, 23, 2163–2173. [Google Scholar] [CrossRef]
- Lei, Y.; Lu, J.; Huang, J. Synthesize Identification and Control for Smart Structures with Time-Varying Parameters under unknown earthquake excitation. Struct. Control. Health Monit. 2020, 27, e2512. [Google Scholar] [CrossRef]
- Taher, S.A.; Li, J.; Fang, H. Online Input, State, and Reponse Estimation for Building Structures under Earthquakes Using Limited Acceleration Measurements (Conference Presentation). In Proceedings of the SPIE 11379, Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2020, Online Only. 27 April–9 May 2020; Volume 11379, p. 1137908. [Google Scholar] [CrossRef]
- Taher, S.; Li, J.; Fang, H. Input and State Estimation for Earthquake-Excited Building Structures Using Acceleration Measurements. Sens. Smart Struct. Technol. Civ. Mech. Aerosp. Syst. 2018, 10598, 1059827. [Google Scholar] [CrossRef]
- Kim, K.; Sohn, H. Dynamic Displacement Estimation for Long-Span Bridges Using Acceleration and Heuristically Enhanced Displacement Measurements of Real-Time Kinematic Global Navigation System. Sensors 2020, 20, 5092. [Google Scholar] [CrossRef]
- Sarwar, M.Z.; Park, J. Bridge Displacement Estimation Using a Co-Located Acceleration and Strain. Sensors 2020, 20, 1109. [Google Scholar] [CrossRef]
- Koo, G.; Kim, K.; Chung, J.Y.; Choi, J.; Kwon, N.Y.; Kang, D.Y. Development of a High Precision Displacement Measurement System by Fusing a Low Cost RTK-GPS Sensor and a Force Feedback Accelerometer for Infrastructure Monitoring. Sensors 2017, 17, 2745. [Google Scholar] [CrossRef]
- Gao, S.; Liu, Y.; Wang, J.; Deng, W.; Oh, H. The Joint Adaptive Kalman Filter (JAKF) for Vehicle Motion State Estimation. Sensors 2016, 16, 1103. [Google Scholar] [CrossRef] [PubMed]
- Oh, B.K.; Park, Y.; Park, H.S. Seismic Response Prediction Method for Building Structures Using Convolutional Neural Network. Struct. Control. Health Monit. 2020, 27, e2519. [Google Scholar] [CrossRef]
- Sun, H.; Burton, H.; Wallace, J. Reconstructing Seismic Response Demands across Multiple Tall Buildings Using Kernel-Based Machine Learning Methods. Struct. Control. Health Monit. 2019, 26, e2359. [Google Scholar] [CrossRef]
- Xu, K.; Mita, A. Estimation of Maximum Drift of MDOF Shear Structures Using Only One Accelerometer. In Proceedings of the 8th Asia Pacific Workshop on Structural Health Monitoring, Cairns, Australia, 9–11 December 2020. [Google Scholar] [CrossRef]
- Smyth, A.; Wu, M. Multi-Rate Kalman Filtering for the Data Fusion of Displacement and Acceleration Response Measurements in Dynamic System Monitoring. Mech. Syst. Signal Process. 2007, 21, 706–723. [Google Scholar] [CrossRef]
- Liu, J.; Ma, C.; Kung, I.; Lin, D.C. Input Force Estimation of a Cantilever Plate by Using a System Identification Technique. Comput. Methods Appl. Mech. Eng. 2000, 190, 1309–1322. [Google Scholar] [CrossRef]
- Gillijns, S.; De Moor, B. Unbiased Minimum-Variance Input and State Estimation for Linear Discrete-Time Systems. Automatica 2007, 43, 111–116. [Google Scholar] [CrossRef]
- Lourens, E.; Reynders, E.; De Roeck, G.; Degrande, G.; Lombaert, G. An Augmented Kalman Filter for Force Identification in Structural Dynamics. Mech. Syst. Signal Process. 2012, 27, 446–460. [Google Scholar] [CrossRef]
- Azam, S.E.; Chatzi, E.; Papadimitriou, C. A Dual Kalman Filter Approach for State Estimation via Output-Only Acceleration Measurements. Mech. Syst. Signal Process. 2015, 60, 866–886. [Google Scholar] [CrossRef]
- Xie, L.; Mita, A.; Luo, L.; Feng, M.Q. Innovative Substructure Approach to Estimating Structural Parameters of Shear Structures. Struct. Control. Health Monit. 2018, 25, e2139. [Google Scholar] [CrossRef]
- Feeny, B.F.; Kappagantu, R. On the Physical Interpretation of Proper Orthogonal Modes in Vibrations. J. Sound Vib. 1998, 211, 607–616. [Google Scholar] [CrossRef]
- Van Overschee, P.; De Moor, B.L. Subspace Identification for Linear Systems: Theory—Implementation—Applications; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1. Initialization , , , , (, ), , 2. Time update of input 3. Measurement update of input 4. Time update of state 5. Measurement update of state |
| Order | Absolute Acceleration | Absolute Displacement | ||
|---|---|---|---|---|
| Energy Contribution (%) | Summation (%) | Energy Contribution (%) | Summation (%) | |
| 1 | 94.81 | 94.81 | 99.94 | 99.94 |
| 2 | 4.11 | 98.92 | 0.06 | 100.00 |
| 3 | 0.79 | 99.71 | 0.00 | 100.00 |
| 4 | 0.22 | 99.93 | 0.00 | 100.00 |
| 5 | 0.06 | 99.99 | 0.00 | 100.00 |
| 6 | 0.01 | 100.00 | 0.00 | 100.00 |
| Order | Absolute Acceleration | Absolute Displacement | ||
|---|---|---|---|---|
| Energy Contribution (%) | Summation (%) | Energy Contribution (%) | Summation (%) | |
| 1 | 57.94 | 57.94 | 99.92 | 99.92 |
| 2 | 18.57 | 76.07 | 0.07 | 99.99 |
| 3 | 12.18 | 88.24 | 0.01 | 100.00 |
| 4 | 10.21 | 98.46 | 0.00 | 100.00 |
| 5 | 1.54 | 100.00 | 0.00 | 100.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, K.; Mita, A. Absolute Displacement-Based Formulation for Peak Inter-Story Drift Identification of Shear Structures Using Only One Accelerometer. Sensors 2021, 21, 3629. https://doi.org/10.3390/s21113629
Xu K, Mita A. Absolute Displacement-Based Formulation for Peak Inter-Story Drift Identification of Shear Structures Using Only One Accelerometer. Sensors. 2021; 21(11):3629. https://doi.org/10.3390/s21113629
Chicago/Turabian StyleXu, Kangqian, and Akira Mita. 2021. "Absolute Displacement-Based Formulation for Peak Inter-Story Drift Identification of Shear Structures Using Only One Accelerometer" Sensors 21, no. 11: 3629. https://doi.org/10.3390/s21113629
APA StyleXu, K., & Mita, A. (2021). Absolute Displacement-Based Formulation for Peak Inter-Story Drift Identification of Shear Structures Using Only One Accelerometer. Sensors, 21(11), 3629. https://doi.org/10.3390/s21113629