
Recent Development of Non-Contact Multi-Target Vital Sign Detection and Location Tracking Based on Metamaterial Leaky Wave Antennas



Abstract
1. Introduction
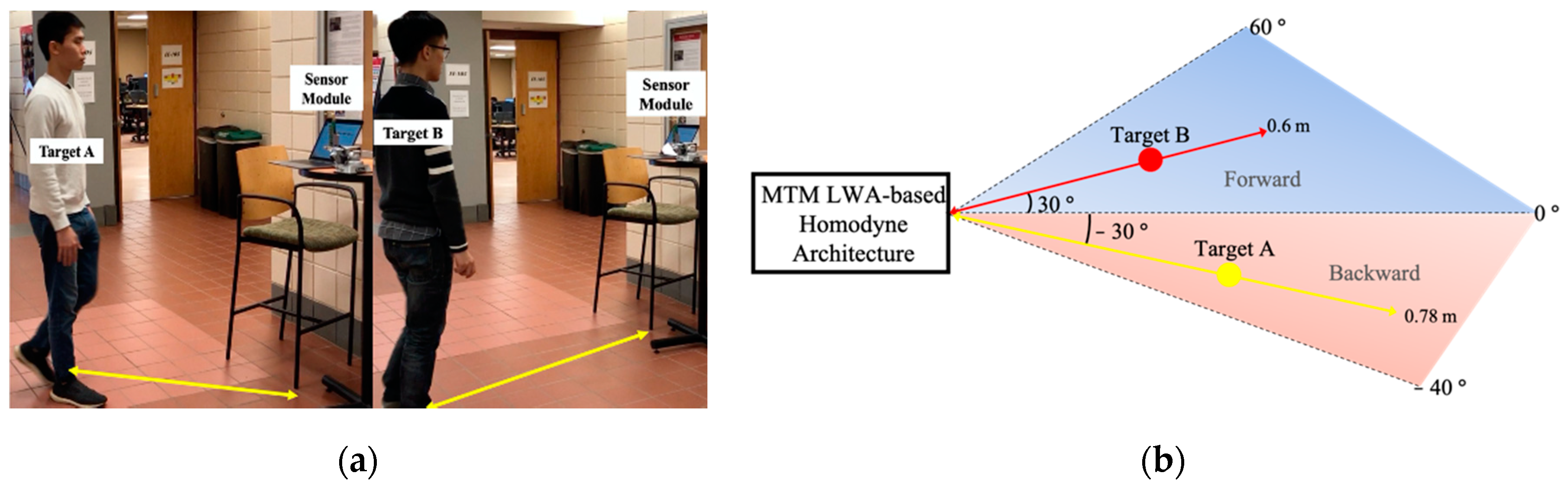
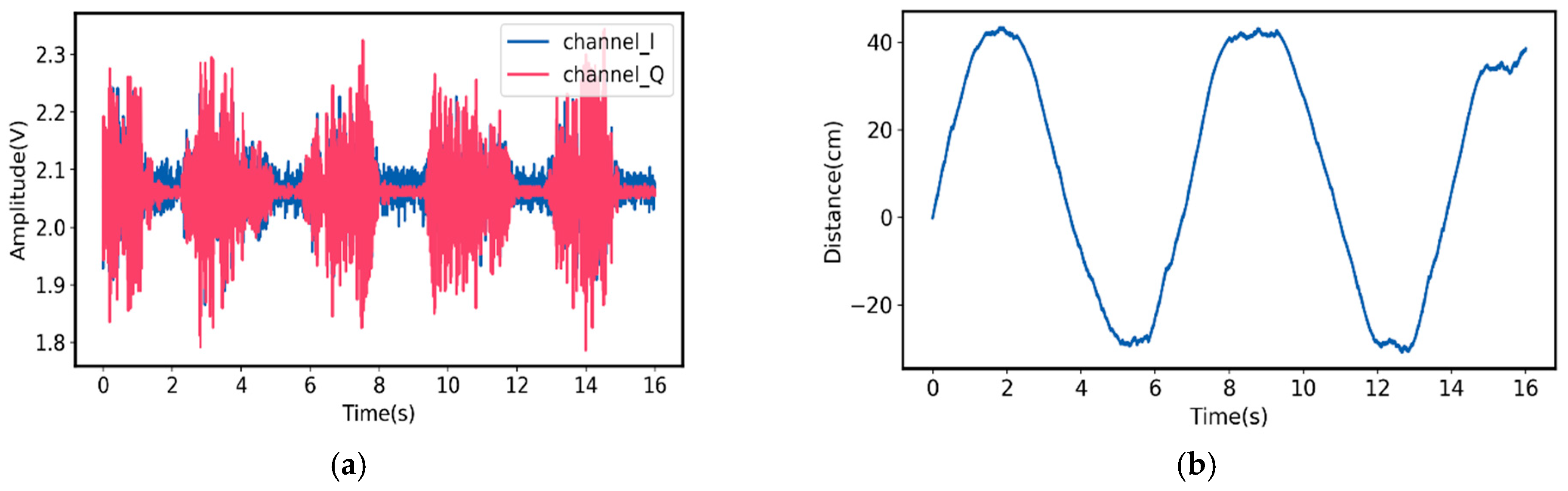
2. Metamaterial Leaky Wave Antenna (MTM LWA)-Based Homodyne Architecture
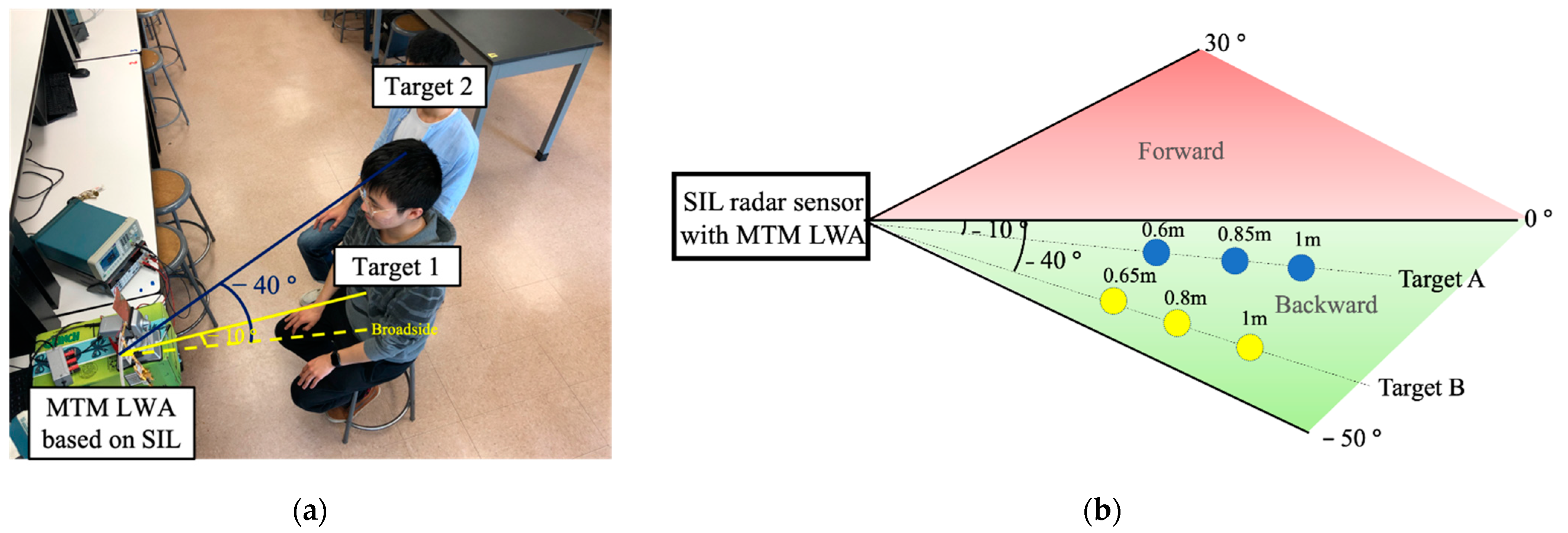
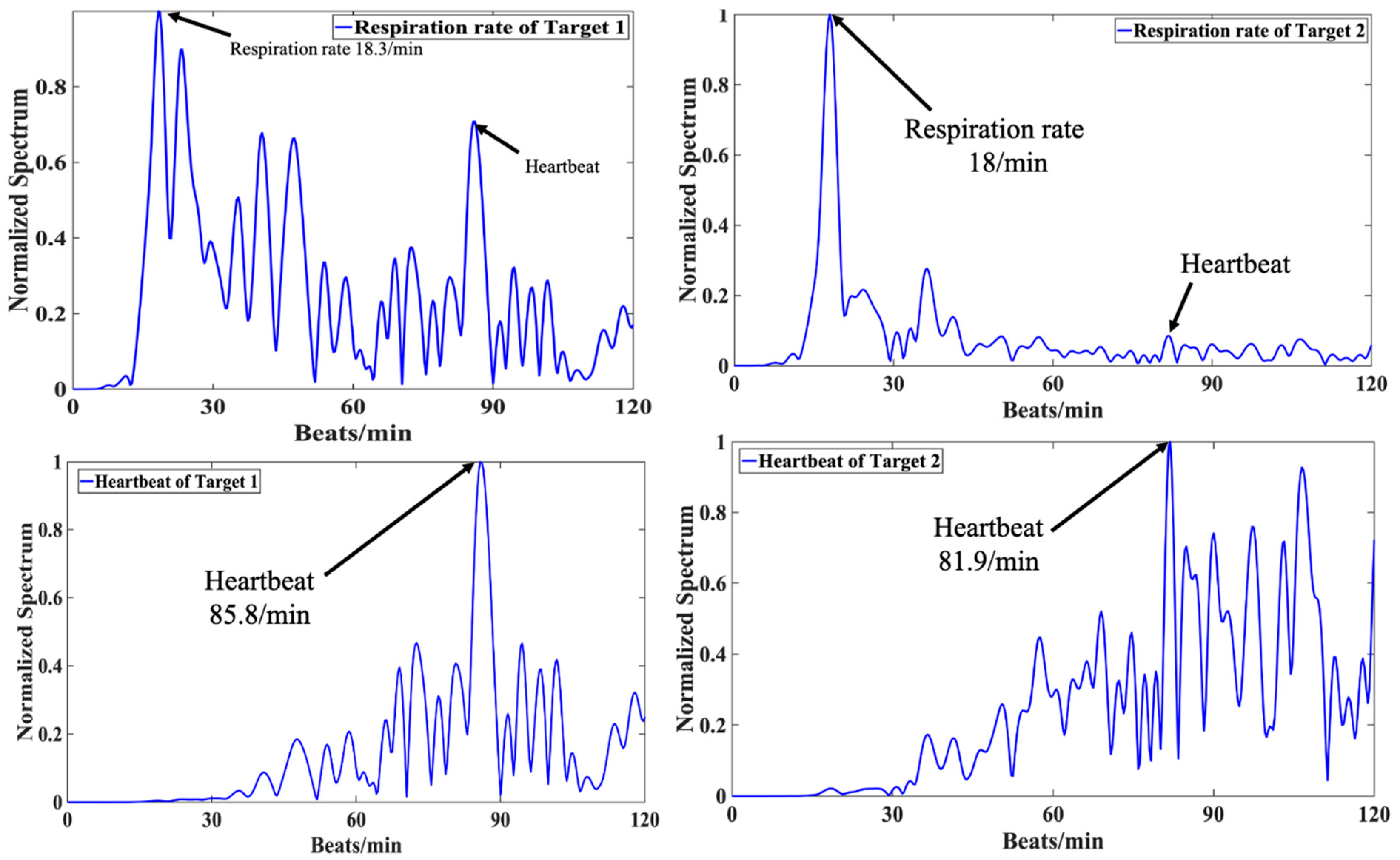
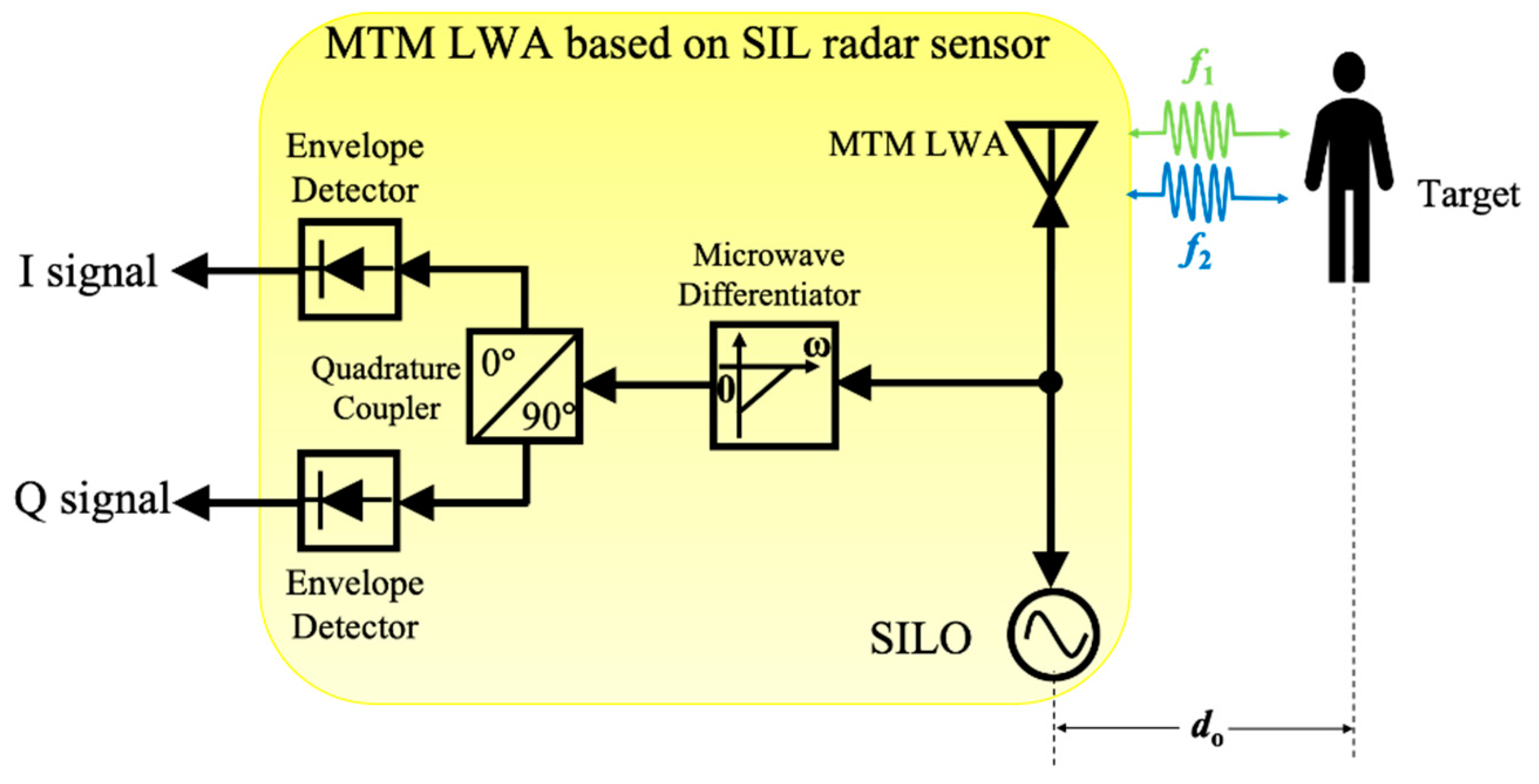
3. MTM LWA Based on Self-Injection Locked (SIL) Radar Architecture
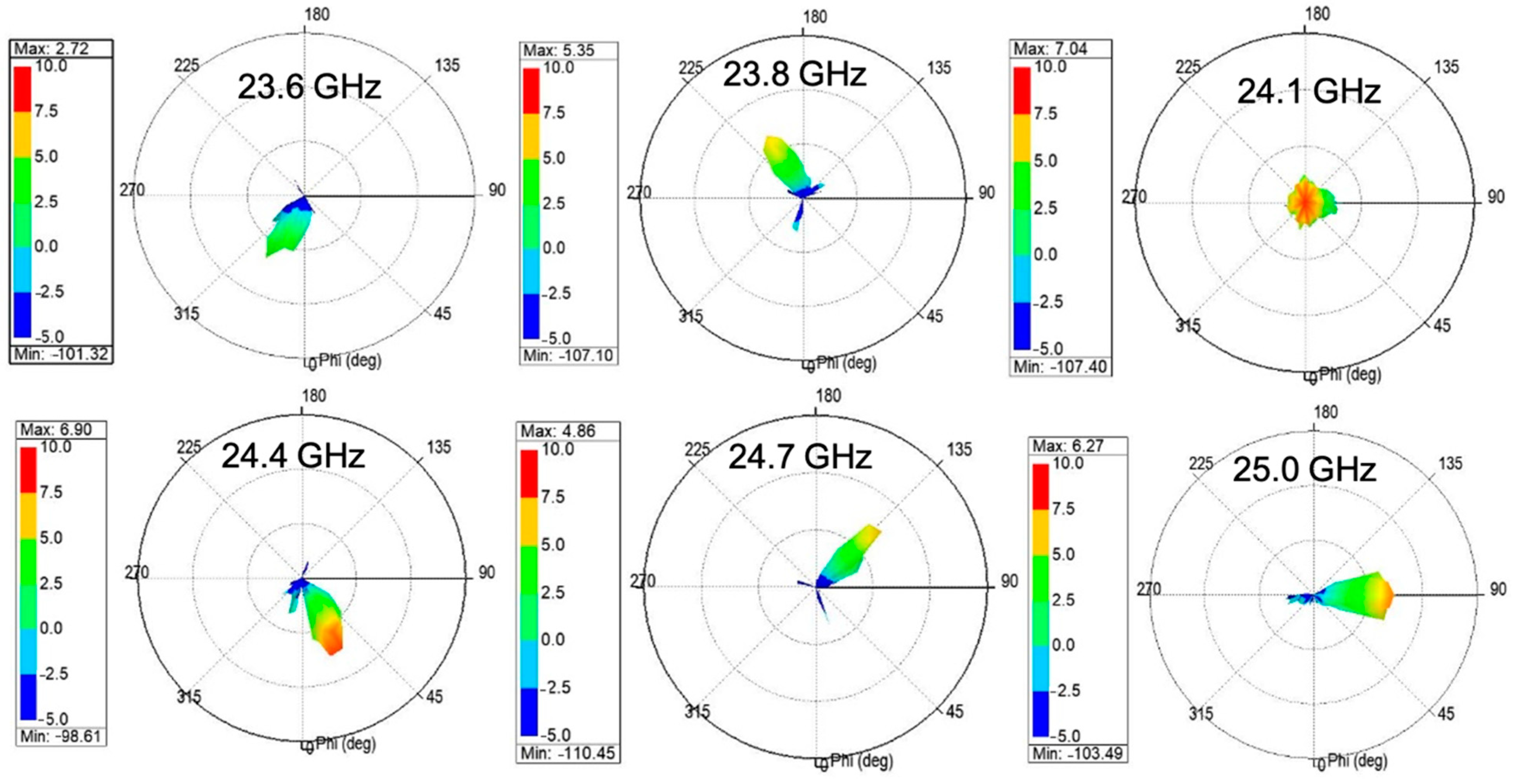
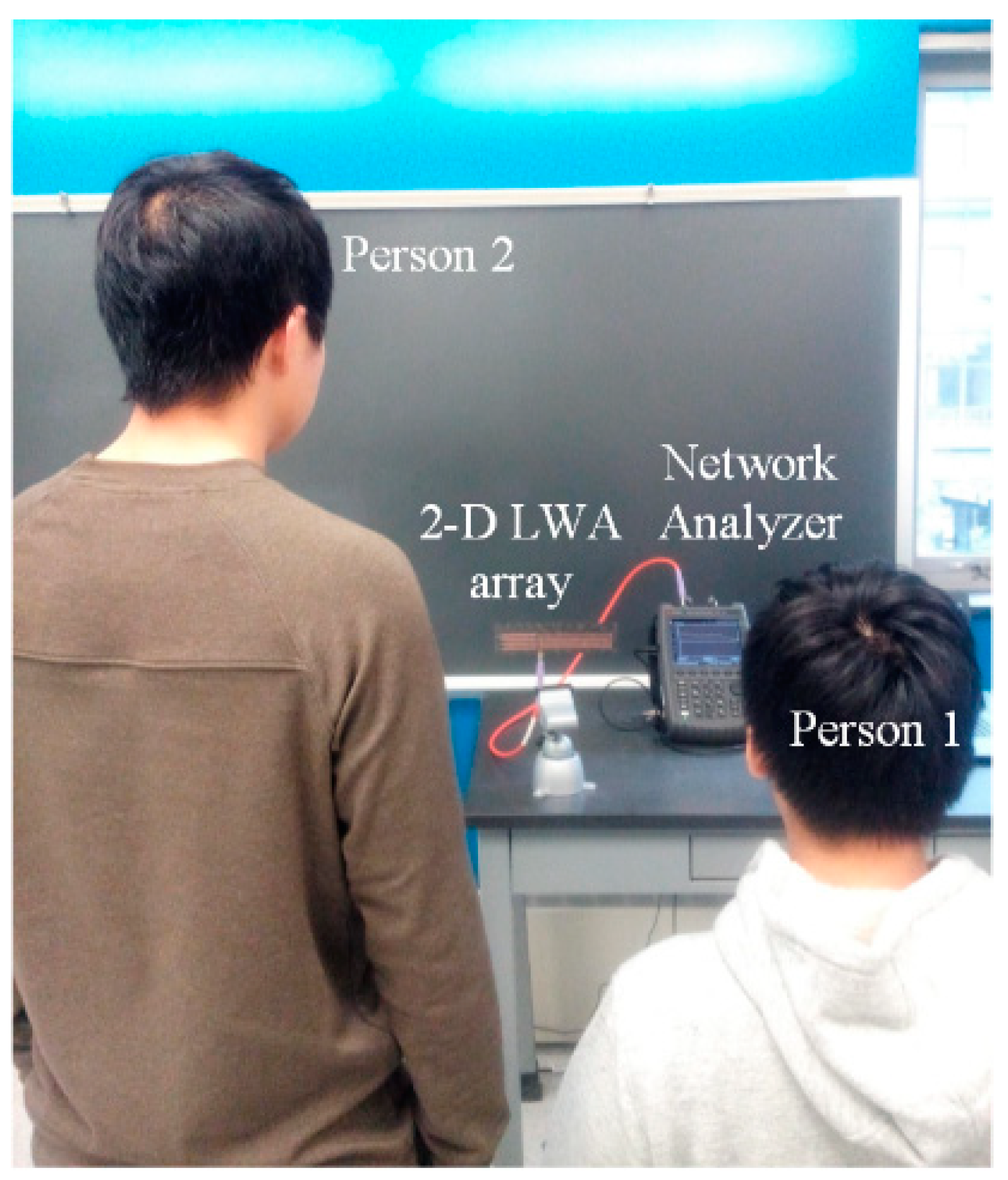
4. Two-Dimensional (2D) Beam Scanning Metamaterial LWA Design
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, W.; Zhao, Z.; Wang, Y.; Zhang, H.; Lin, F. Noncontact accurate measurement of cardiopulmonary activity using a compact quadrature doppler radar sensor. IEEE Trans. Biomed. Eng. 2014, 61, 725–735. [Google Scholar] [CrossRef] [PubMed]
- Zhao, M.; Adib, F.; Katabi, D. Emotion recognition using wireless signals. In Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking, New York, NY, USA, 3–7 October 2016; pp. 95–108. [Google Scholar]
- Sakamoto, T.; Imasaka, R.; Taki, H.; Sato, T.; Yoshioka, M.; Inoue, K.; Fukuda, T.; Sakai, H. Feature-based correlation and topological similarity for interbeat interval estimation using ultrawideband radar. IEEE Trans. Biomed. Eng. 2016, 63, 747–757. [Google Scholar]
- Nosrati, M.; Tavassolian, N. High-Accuracy Heart Rate Variability Monitoring Using Doppler Radar Based on Gaussian Pulse Train Modeling and FTPR Algorithm. IEEE Trans. Microw. Theory Tech. 2018, 66, 556–567. [Google Scholar] [CrossRef]
- Muehlsteff, J.; Thijs, J.; Pinter, R.; Morren, G.; Muesch, G. A handheld device for simultaneous detection of electrical and mechanical cardiovascular activities with synchronized ECG and CW-Doppler Radar. In Proceedings of the EMBS, Lyon, France, 22–26 August 2007; pp. 5758–5761. [Google Scholar]
- Buxi, D.; Redouté, J.M.; Yuce, M.R. Blood pressure estimation using pulse transit time from bioimpedance and continuous wave radar. IEEE Trans. Biomed. Eng. 2017, 64, 917–927. [Google Scholar] [CrossRef] [PubMed]
- Thiel, F.; Kosch, O.; Seifert, F. Ultra-wideband sensors for improved magnetic resonance imaging, cardiovascular monitoring and tumour diagnostics. Sensors 2010, 10, 10778–10802. [Google Scholar] [CrossRef]
- Lazaro, A.; David Girbau, D.; Villarino, R. Techniques for clutter suppression in the presence of body movements during the detection of respiratory activity through UWB radars. Sensors 2014, 14, 2595–2618. [Google Scholar] [CrossRef]
- Lin, F.; Zhuang, Y.; Song, C.; Wang, A.; Li, Y.; Gu, C.; Li, C.; Xu, W. Sleepsense: A noncontact and cost-effective sleep monitoring system. IEEE Trans. Biomed. Circuits Syst. 2017, 11, 189–202. [Google Scholar] [CrossRef]
- Baboli, M.; Singh, A.; Soll, B.; Boric-Lubecke, O.; Lubecke, V.M. Good night: Sleep monitoring using a physiological radar monitoring system integrated with a polysomnography system. IEEE Microw. Mag. 2015, 16, 34–41. [Google Scholar] [CrossRef]
- Vossiek, M.; Roskosch, R.; Heide, P. Precise 3-D Object position tracking using FMCW radar. In Proceedings of the 29th European Microwave Conference, Munich, Germany, 5–7 October 1999; pp. 234–237. [Google Scholar]
- Wang, Y.; Liu, Q.; Fathy, A.E. Simultaneous localization and respiration detection of multiple people using low cost UWB biometric pulse Doppler radar sensor. In Proceedings of the IEEE MTT-S International Microwave Symposium (IMS), Montreal, QC, Canada, 17–22 June 2012; pp. 1–3. [Google Scholar]
- Nguyen, V.; Pyun, J. Location detection and tracking of moving targets by a 2D IR-UWB radar system. Sensors 2015, 15, 6740–6762. [Google Scholar] [CrossRef]
- Shingu, G.; Takizawa, K.; Ikegami, T. Human body detection using UWB radar in an indoor environment. In Proceedings of the International Symposium on Communications and Information Technologies, Vientiane, Laos, 21–23 October 2008; pp. 283–288. [Google Scholar]
- Nishida, Y.; Murakami, S.; Hori, T.; Mizoguchi, H. Minimally privacy-violative human location sensor by ultrasonic radar embedded on ceiling. In Proceedings of the IEEE Sensors, Vienna, Austria, 24–27 October 2004; pp. 433–436. [Google Scholar]
- Yan, J.; Zhang, G.; Hong, H.; Chu, H.; Li, C.; Zhu, X. Phase-Based human target 2-D identification with a mobile FMCW radar platform. IEEE Trans. Microw. Theory Tech. 2019, 67, 5348–5359. [Google Scholar] [CrossRef]
- Park, B.K.; Boric-Lubecke, O.; Lubecke, V.M. Arctangent demodulation with DC offset compensation in quadrature Doppler radar receiver systems. IEEE Trans. Microw. Theory Tech. 2007, 55, 1073–1079. [Google Scholar] [CrossRef]
- Li, C.; Lin, J. Random body movement cancellation in Doppler radar vital sign detection. IEEE Trans. Microw. Theory Tech. 2008, 56, 3143–3152. [Google Scholar]
- Mostafanezhad, I.; Boric-Lubecke, O.; Lubecke, V. A Coherent Low IF Receiver Architecture for Doppler Radar Motion Detector Used in Life Signs Monitoring. In Proceedings of the 2010 IEEE Radio and Wireless Symposium (RWS), New Orleans, LA, USA, 10–14 January 2010; pp. 571–574. [Google Scholar]
- Nieh, C.-M.; Wei, C.; Lin, J. Concurrent Detection of Vibration and Distance Using Unmodulated CW Doppler Vibration Radar with an Adaptive Beam-Steering Antenna. IEEE Trans. Microw. Theory Tech. 2015, 63, 2069–2078. [Google Scholar] [CrossRef]
- Mitomo, T.; Ono, N.; Hoshino, H.; Yoshihara, Y.; Watanabe, I.; Seto, I. A 77 GHz 90 nm CMOS transceiver for FMCW radar applications. IEEE J. Solid-State Circuits 2010, 45, 928–937. [Google Scholar] [CrossRef]
- SeyyedEsfahlan, M.; Öztürk, E.; Kaynak, M.; Tekin, I. 77-GHz four element phased-array radar receiver front end. IEEE Trans. Compon. Packag. Manuf. Technol. 2016, 6, 1162–1173. [Google Scholar] [CrossRef]
- Wang, G.; Gu, C.; Inoue, T.; Li, C. A Hybrid FMCW-Interferometry Radar for Indoor Precise Positioning and Versatile Life Activity Monitoring. IEEE Trans. Microw. Theory Tech. 2014, 62, 2812–2822. [Google Scholar] [CrossRef]
- Nosrati, M.; Shahsavari, S.; Lee, S.; Wang, H.; Tavassolian, N. A Concurrent Dual-Beam Phased-Array Doppler Radar Using MIMO Beamforming Techniques for Short-Range Vital-Signs Monitoring. IEEE Trans. Antennas Propag. 2019, 67, 2390–2404. [Google Scholar] [CrossRef]
- Lv, H.; Liu, M.; Jiao, T.; Zhang, Y.; Yu, X.; Li, S.; Jing, X.; Wang, J. Multi-target Human Sensing via UWB Bio-radar Based on Multiple Antennas. In Proceedings of the IEEE International Conference of IEEE Region 10 (TENCON 2013), Xian, China, 22–25 October 2013; pp. 1–4. [Google Scholar]
- Cardillo, E.; Caddemi, A. A Review on Biomedical MIMO Radars for Vital Sign Detection and Human Localization. Electronics 2020, 9, 1497. [Google Scholar] [CrossRef]
- Zhang, Z.; Nian, Y.; Chen, J.; He, M. An Experimental Study to Optimize the Stepped-Frequency Continuous-Wave Radar Parameters for Noncontact Multi-target Vital Sign Monitoring. In Proceedings of the 2019 IEEE International Conference on Computational Electromagnetics (ICCEM), Shangai, China, 20–22 March 2019; pp. 1–4. [Google Scholar]
- Xiong, J.; Zhang, H.; Hong, H.; Zhao, H.; Zhu, X.; Li, C. Multi-target vital signs detection using SIMO continuous-wave radar with DBF technique. In Proceedings of the IEEE Radio and Wireless Symposium, San Antonio, TX, USA, 26–29 January 2020; pp. 194–196. [Google Scholar]
- Wang, J.; Bai, X.; Gao, Q.; Li, X.; Bi, X.; Pan, M. Multi-Target Device-Free Wireless Sensing Based on Multiplexing Mechanisms. IEEE Trans. Veh. Tech. 2020, 69, 10242–10251. [Google Scholar] [CrossRef]
- Fang, G.-W.; Huang, C.-Y.; Yang, C.-L. Switch-based low intermediate frequency system of a vital sign radar for simultaneous multitarget and multidirectional detection. IEEE J. Electromagn. RF Microw. Med. Biol. 2020, 4, 265–272. [Google Scholar] [CrossRef]
- Lai, A.; Caloz, C.; Itoh, T. Composite right/left-handed transmission line metamaterials. IEEE Microw. Mag. 2004, 5, 34–50. [Google Scholar] [CrossRef]
- Veselago, V.G. Electrodynamics of substances with simultaneously negative values of ε and μ. Usp. Fiz. Nauk 1967, 92, 517–548. [Google Scholar] [CrossRef]
- Smith, D.R.; Padilla, W.J.; Vier, D.C.; Nemat-Nasser, S.C.; Schultz, S. Composite medium with simultaneously negative permeability and permittivity. Phys. Rev. Lett. 2000, 84, 4184. [Google Scholar] [CrossRef]
- Caloz, C.; Okabe, H.; Iwai, H.; Itoh, T. Transmission line approach of left-handed materials. In Proceedings of the USNC/URSI Nat. Radio Science Meeting, San Antonio, TX, USA, 16–21 June 2002; pp. 39–42. [Google Scholar]
- Iyer, A.K.; Eleftheriades, G.V. Negative refractive index metamaterials supporting 2-D waves. In Proceedings of the IEEE MTT-S International Microwave Symposium (IMS), Seattle, WA, USA, 2–7 June 2002; pp. 1067–1070. [Google Scholar]
- Caloz, C.; Sanada, A.; Itoh, T. A novel composite right-/left-handed coupled-line directional coupler with arbitrary coupling level and broad bandwidth. IEEE Trans. Microw. Theory Tech. 2004, 52, 980–992. [Google Scholar] [CrossRef]
- Sanada, A.; Caloz, C.; Itoh, T. Characteristics of the composite right left-handed transmission lines. IEEE Microw. Wirel. Compon. Lett. 2004, 14, 68–70. [Google Scholar] [CrossRef]
- Marqués, R.; Martin, F.; Sorolla, M. Metamaterials with Negative Parameters: Theory, Design, and Microwave Applications; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Caloz, C.; Itoh, T.; Rennings, A. CRLH metamaterial leaky-wave and resonant antennas. IEEE Antennas Propag. Mag. 2008, 50, 25–39. [Google Scholar] [CrossRef]
- Paulotto, S.; Baccarelli, P.; Frezza, F.; Jackson, D.R. Full-Wave modal dispersion analysis and broadside optimization for a class of microstrip CRLH leaky-wave antennas. IEEE Trans. Microw. Theory Tech. 2008, 56, 2826–2837. [Google Scholar] [CrossRef]
- Kawaguchi, T.; Deguchi, H.; Tsuji, M. A Unit Cell Construction Based on Equivalent-Circuit Elements for Microstrip Leaky-Wave Antennas. In Proceedings of the 2019 International Conference on Electromagnetics in Advanced Applications (ICEAA), Granada, Spain, 9–13 September 2019; pp. 0641–0645. [Google Scholar]
- Javanbakht, N.; Syrett, B.; Amaya, R.E.; Shaker, J. Electric beam-steering metamaterial leaky-wave antenna. In Proceedings of the 2019 International Conference on Electromagnetics in Advanced Applications (ICEAA), Granada, Spain, 9–13 September 2019; pp. 0325–0327. [Google Scholar]
- Oliner, A.A. Radiating Periodic Structures: Analysis in Terms of k vs. β Diagrams, Short Course on Microwave Field and Network Techniques; Polytechnic Institute of Brooklyn: New York, NY, USA, 1963. [Google Scholar]
- Crepeau, P.J.; Mclsaac, P.R. Consequencies of symmetry in periodic structures. In Proceedings of the IEEE; IEEE: New York, NY, USA, 1964; pp. 33–43. [Google Scholar]
- Zhang, G.; Zhang, Q.; Chen, Y.; Murch, R.D. High-scanning-rate and wide-angle leaky-wave antennas based on glide-symmetry Goubau line. IEEE Trans. Antennas Propag. 2020, 68, 2531–2540. [Google Scholar] [CrossRef]
- Jang, T.; Choi, J.; Lim, S. Compact coplanar waveguide (CPW)-fed zeroth-order resonant antennas with extended bandwidth and high efficiency on vialess single layer. IEEE Trans. Antennas Propag. 2011, 59, 363–372. [Google Scholar] [CrossRef]
- Wu, C.-T.M. A real-time multiple target detecting scheme based on microwave metamaterials. In Proceedings of the 2015 European Microwave Conference (EuMC), Paris, France, 6–11 September 2015; pp. 497–500. [Google Scholar]
- Salarkaleji, M.; Ali, M.A.; Wu, C.-T.M. Two-dimensional full hemisphere frequency scanning array based on metamaterial leaky wave antennas and feed networks. In Proceedings of the IEEE MTT-S International Microwave Symposium (IMS), San Francisco, CA, USA, 22–27 May 2016; pp. 1–4. [Google Scholar]
- Lu, C.; Yuan, Y.; Tseng, C.-H.; Wu, C.-T.M. Multi-Target Continuous-Wave Vital Sign Radar using 24 GHz Metamaterial Leaky Wave Antennas. In Proceedings of the IEEE MTT-S International Microwave Biomedical Conference (IMBioC), Nanjing, China, 6–8 May 2019; pp. 1–4. [Google Scholar]
- Lu, C.; Yuan, Y.; Tseng, C.-H.; Wu, C.-T.M. Multi-target motion detection radar sensor using 24GHz metamaterial leaky wave antennas. In Proceedings of the IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Detroit, MI, USA, 15–16 April 2019; pp. 1–3. [Google Scholar]
- Yuan, Y.; Lu, C.; Chen, A.Y.-K.; Tseng, C.-H.; Wu, C.-T.M. Multi-target concurrent vital sign and location detection using metamaterial-integrated self-injection-locked quadrature radar sensor. IEEE Trans. Microw. Theory Tech. 2019, 67, 5429–5437. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, Y.; Wu, C.-T.M. Noncontact Vital Sign Detection using 24GHz Two-Dimensional Frequency Scanning Metamaterial Leaky Wave Antenna Array. In Proceedings of the IEEE MTT-S International Microwave Symposium (IMS), Philadelphia, PA, USA, 10–15 June 2018; pp. 255–258. [Google Scholar]
- Yang, Z.-k.; Zhao, S.; Huang, X.-D.; Lu, W. Accurate Doppler radar-based heart rate measurement using matched filter. IEICE Electron. Expr. Lett. 2020, 17, 1–6. [Google Scholar] [CrossRef]
- Rahman, A.; Yavari, E.; Gao, X.; Lubecke, V.; Boric-Lubecke, O. Signal processing techniques for vital sign monitoring using mobile short range Doppler radar. In Proceedings of the IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems (BioWireleSS), San Diego, CA, USA, 25–28 January 2015; pp. 17–19. [Google Scholar]
- Wang, J.; Wang, X.; Chen, L.; Huangfu, J.; Li, C.; Ran, L. Non-contact Distance and Amplitude Independent Vibration Measurement Based on an Extended DACM Algorithm. IEEE Trans. Instrum. Meas. 2014, 63, 145–153. [Google Scholar] [CrossRef]
- Rittiplang, A.; Phasukkit, P. UWB Radar for Multiple Human Detection through the Wall Based on Doppler Frequency and Variance Statistic. In Proceedings of the 2019 12th Biomedical Engineering International Conference (BMEiCON), Ubon Ratchathani, Thailand, 19–22 November 2019; pp. 1–5. [Google Scholar]
- Walterscheid, I.; Biallawons, O.; Berens, P. Contactless Respiration and Heartbeat Monitoring of Multiple People Using a 2-D Imaging Radar. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 3720–3725. [Google Scholar]
- Otto, S.; Rennings, A.; Solbach, K.; Caloz, C. Transmission line modeling and asymptotic formulas for periodic leaky-wave antennas scanning through broadside. IEEE Trans. Antennas Propag. 2011, 59, 3695–3709. [Google Scholar] [CrossRef]
- Gomez-Diaz, J.S.; Canete-Rebenaque, D.; Alvarez-Melcon, A. A simple CRLH LWA circuit condition for constant radiation rate. IEEE Antennas Wirel. Propag. Lett. 2011, 10, 29–32. [Google Scholar] [CrossRef][Green Version]
- Droitcour, A.D.; Boric-Lubecke, O.; Lubecke, V.M.; Lin, J.; Kovacs, G.T.A. Range correlation and I/Q performance benefits in single-chip silicon Doppler radars for noncontact cardiopulmonary monitoring. IEEE Trans. Microw. Theory Tech. 2004, 52, 838–848. [Google Scholar] [CrossRef]
- Wang, F.K.; Li, C.J.; Hsiao, C.H.; Horng, T.S.; Lin, J.; Peng, K.C.; Jau, J.K.; Li, J.Y.; Chen, C.C. A novel vital-sign sensor based on a self-injection-locked oscillator. IEEE Trans. Microw. Theory Tech. 2010, 58, 4112–4120. [Google Scholar] [CrossRef]
- Wang, F.-K.; Horng, T.-S.; Peng, K.-C.; Jau, J.-K.; Li, J.-Y.; Chen, C.-C. Single-antenna Doppler radars using self and mutual injection locking for vital sign detection with random body movement cancellation. IEEE Trans. Microw. Theory Tech. 2011, 59, 3577–3587. [Google Scholar] [CrossRef]
- Gonzalez, G. Foundations of Oscillator Circuit Design; Artech House: Boston, MA, USA, 2007. [Google Scholar]
- Tseng, C.-H.; Yu, L.-T.; Huang, J.-K.; Chang, C.-L. A wearable self-injection-locked sensor with active integrated antenna and differentiator-based envelope detector for vital-sign detection from chest wall and wrist. IEEE Trans. Microw. Theory Tech. 2018, 66, 2511–2521. [Google Scholar] [CrossRef]
- Hsue, C.-W.; Tsai, L.-C.; Chen, K.-L. Implementation of first-order and second-order microwave differentiators. IEEE Trans. Microw. Theory Tech. 2004, 52, 1443–1448. [Google Scholar] [CrossRef]
- Wu, C.-T.M.; Sun, J.S. Microwave metamaterials-based ultrafast detecting scheme for automotive radars. Microw. Opt. Technol. Lett. 2015, 57, 1343–1345. [Google Scholar] [CrossRef]
- Wang, J.; Li, C. A human tracking and physiological monitoring fsk technology for single senior at home care. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 4432–4435. [Google Scholar]
- Rohling, H.; Moller, C. Radar waveform for automotive radar systems and applications. In Proceedings of the IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–3. [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean of the Calculation Results (m) | Ground Truth (m) 1 | Error (m) | Standard Deviation (m) | |
|---|---|---|---|---|
| Target 1 | 0.55 | 0.6 | 0.05 | 0.03 |
| 0.81 | 0.85 | 0.04 | 0.04 | |
| 1.01 | 1 | −0.01 | 0.02 | |
| Target 2 | 0.7 | 0.65 | 0.05 | 0.08 |
| 0.77 | 0.8 | 0.03 | 0.06 | |
| 0.98 | 1 | 0.02 | 0.04 |
| Distance (m) | Respiration (beats/min) | Ground Truth | Heartbeat (beats/min) | Ground Truth | |
|---|---|---|---|---|---|
| Target 1 | 0.6 | 18.3 | 18 | 85.8 | 87 |
| 0.85 | 18 | 17 | 86.7 | 86 | |
| 1 | 16.5 | 17 | 75 | 77 | |
| Target 2 | 0.65 | 18 | 18 | 81.9 | 81 |
| 0.8 | 15 | 15 | 83.4 | 83 | |
| 1 | 15 | 16 | 79 | 80 |
| Radar Configuration | Signal Processing Method | Number of Antennas Used | System Size |
|---|---|---|---|
| Mechanical Rotors [23] | FFT | Low | Large |
| SIMO [29] | ADMS etc. | High | Medium |
| MIMO [26] | Frequency analysis etc. | High | Medium |
| RF switch-based radar system [30] | Heuristic digital signal processing | High | Medium |
| MTM LWA [51] | FFT | Low | Small |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Y.; Wu, C.-T.M. Recent Development of Non-Contact Multi-Target Vital Sign Detection and Location Tracking Based on Metamaterial Leaky Wave Antennas. Sensors 2021, 21, 3619. https://doi.org/10.3390/s21113619
Yuan Y, Wu C-TM. Recent Development of Non-Contact Multi-Target Vital Sign Detection and Location Tracking Based on Metamaterial Leaky Wave Antennas. Sensors. 2021; 21(11):3619. https://doi.org/10.3390/s21113619
Chicago/Turabian StyleYuan, Yichao, and Chung-Tse Michael Wu. 2021. "Recent Development of Non-Contact Multi-Target Vital Sign Detection and Location Tracking Based on Metamaterial Leaky Wave Antennas" Sensors 21, no. 11: 3619. https://doi.org/10.3390/s21113619
APA StyleYuan, Y., & Wu, C.-T. M. (2021). Recent Development of Non-Contact Multi-Target Vital Sign Detection and Location Tracking Based on Metamaterial Leaky Wave Antennas. Sensors, 21(11), 3619. https://doi.org/10.3390/s21113619