
Fault Diagnosis and Fault Frequency Determination of Permanent Magnet Synchronous Motor Based on Deep Learning




Abstract
:1. Introduction
- (1)
- Unlike the aforementioned related studies, the 1D CNN model proposed in this paper diagnoses motor faults by extracting the stator current signal and torque signal of the motor.
- (2)
- In [33], a multilevel information fusion model, combined with a 1D CNN and LSTM, was used to diagnose the motor faults. The model can detect five different motor faults by extracting the vibration and stator current signals. However, Wang et al. [33] considered only three fixed load settings. This study considered variable loads ranging from 0 to 0.24 Nm.
- (3)
- The parameters and sizes of the neural network can be reduced using the proposed feature-extraction module. Furthermore, the model remains robust and can obtain a high classification accuracy.
- (4)
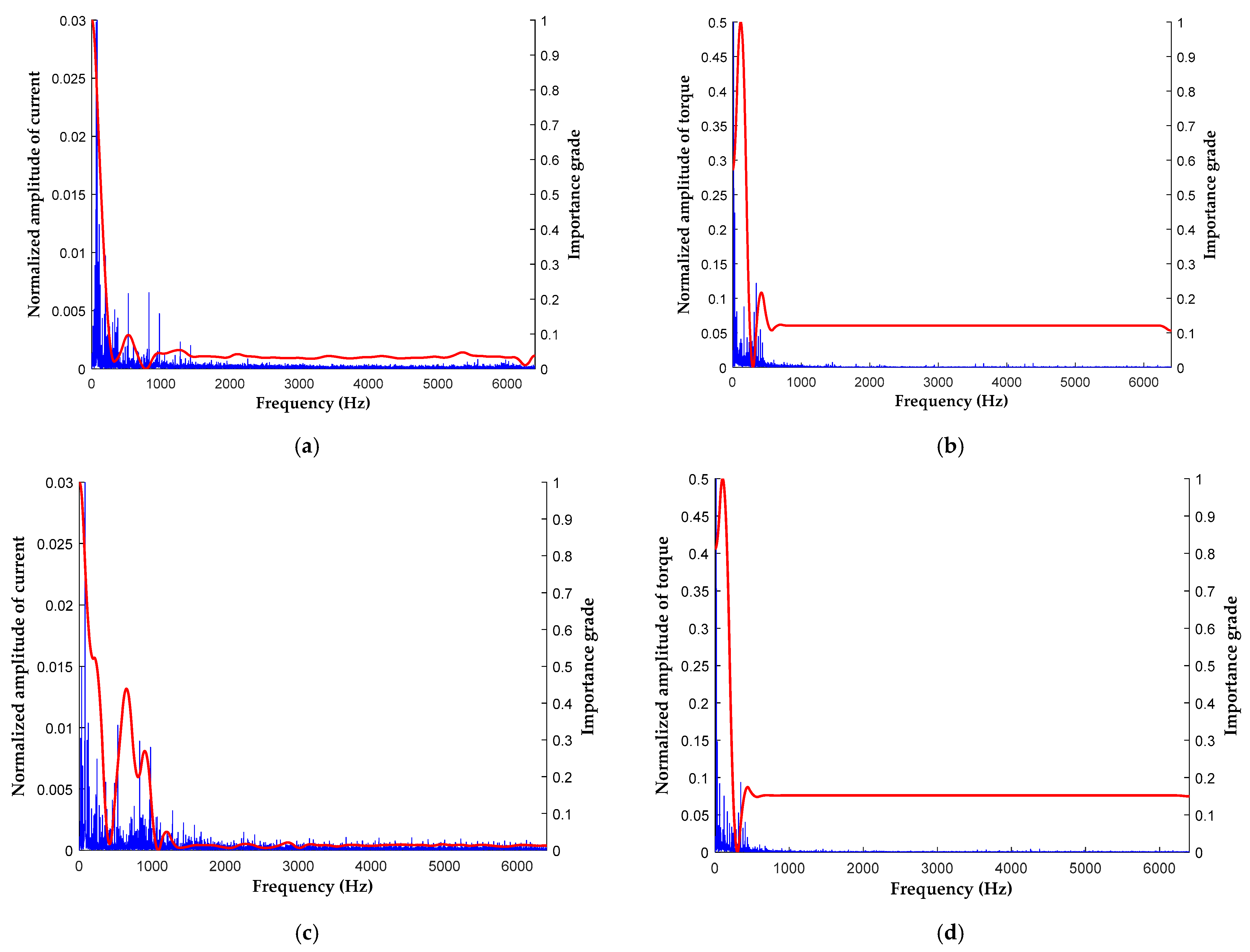
- In the aforementioned studies, the exact frequency of the signal contributing to the classification was not shown. This study implemented a weakly supervised architecture and visualized the important grades of the frequency components that contribute to the classification.
- (5)
- In summary, we propose a 1D CNN model to detect motor faults, under a wide range of motor speeds from 100 to 1600 rpm and loads from 0 to 0.24 Nm. In addition, the model can detect the effect of eccentricity and identify important frequency components.
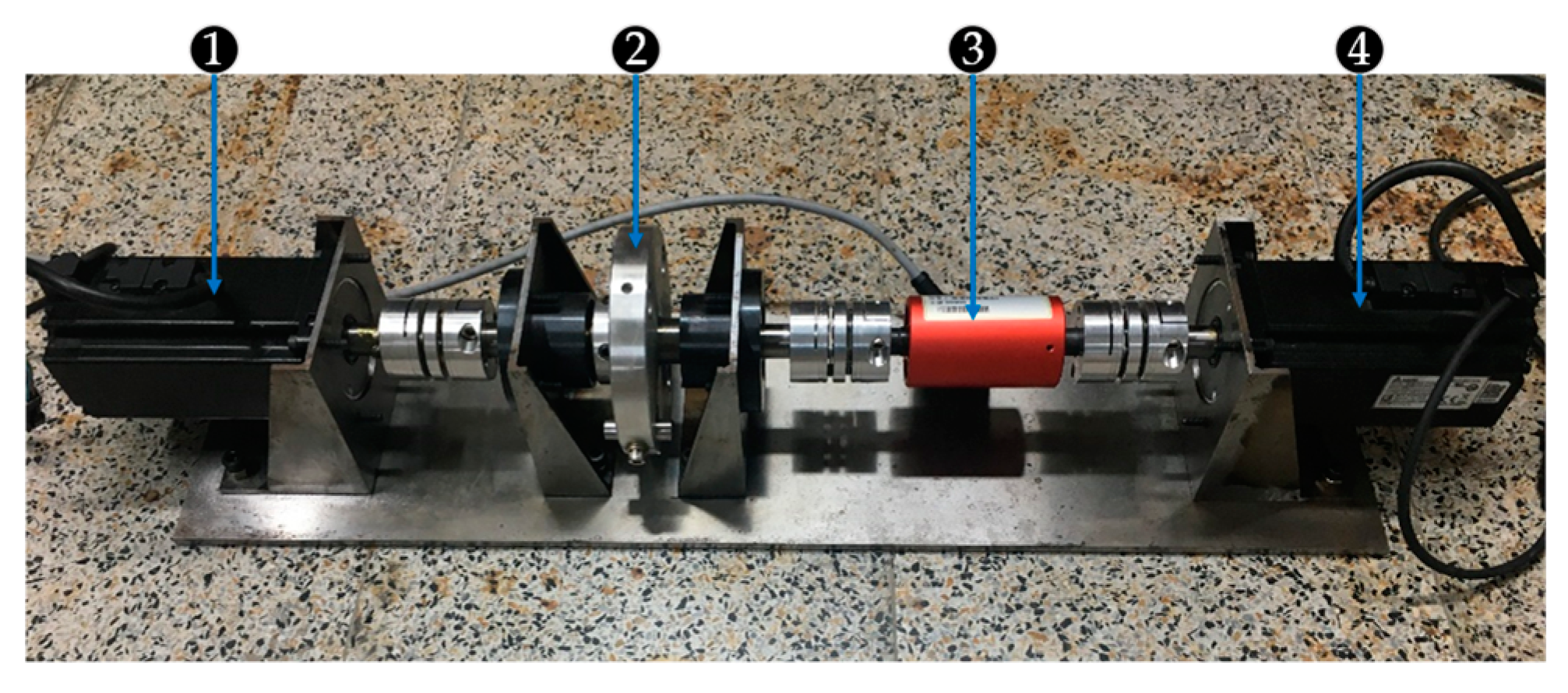
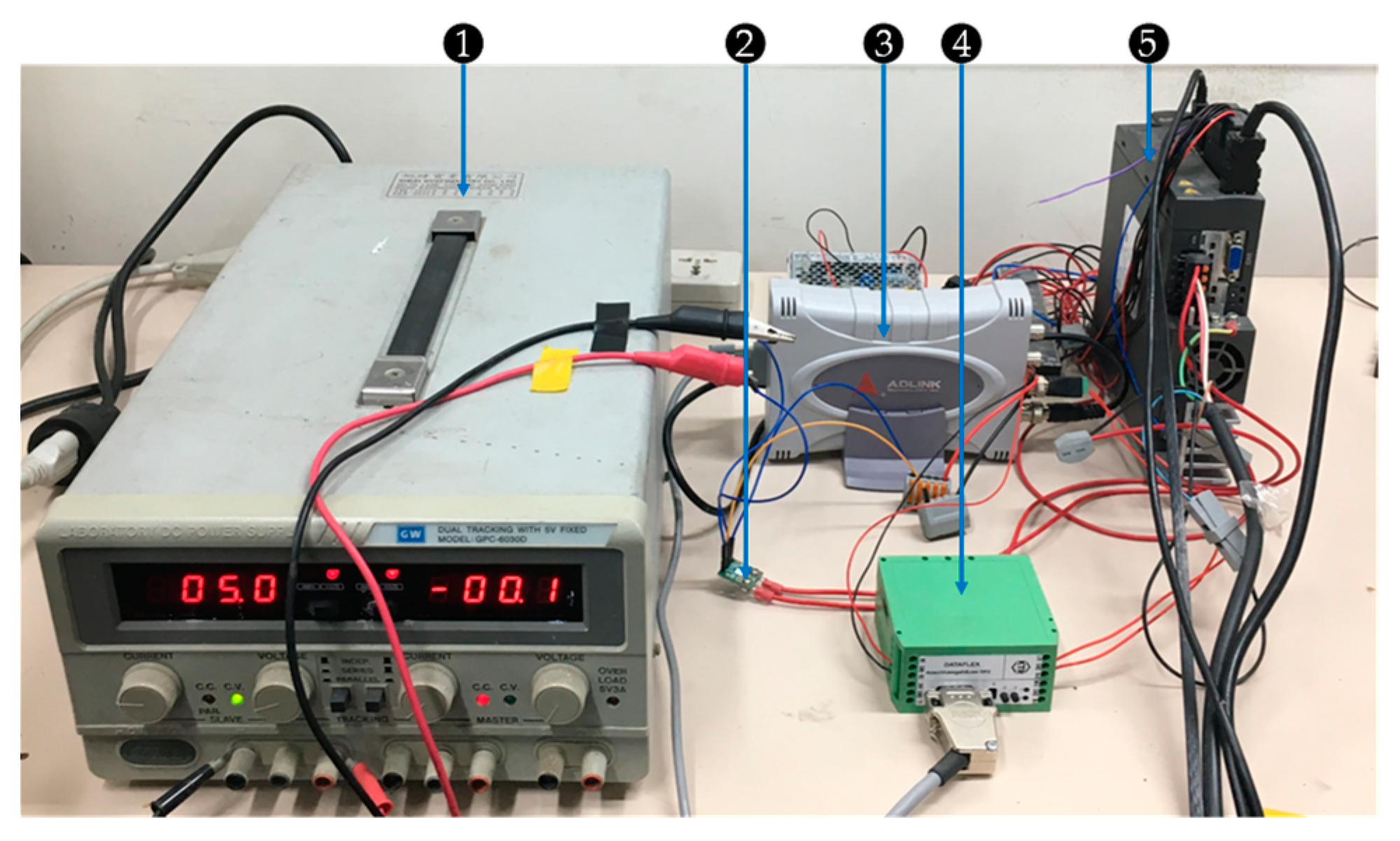
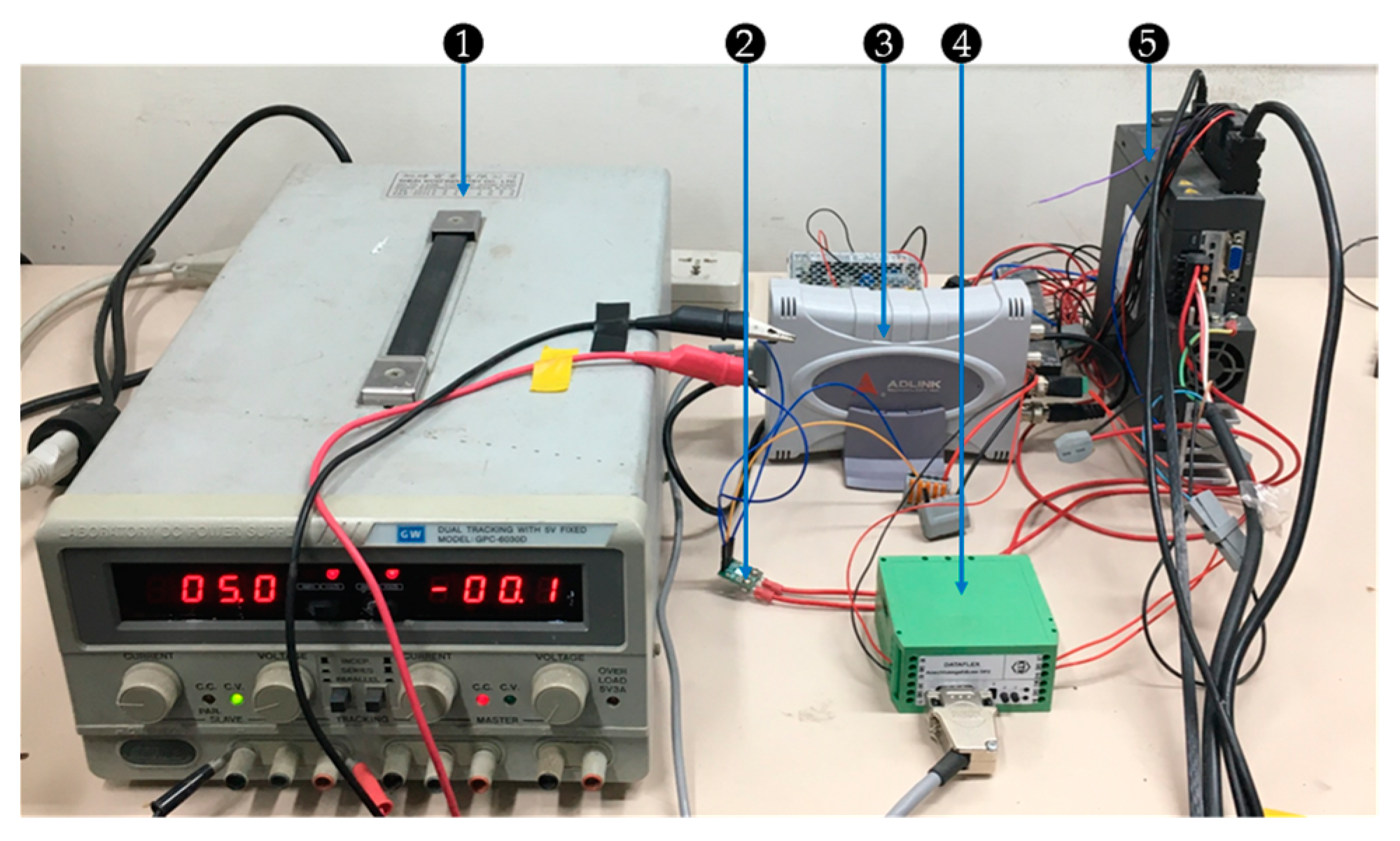
2. Motor Diagnosis Platform and Sensors
3. Methods
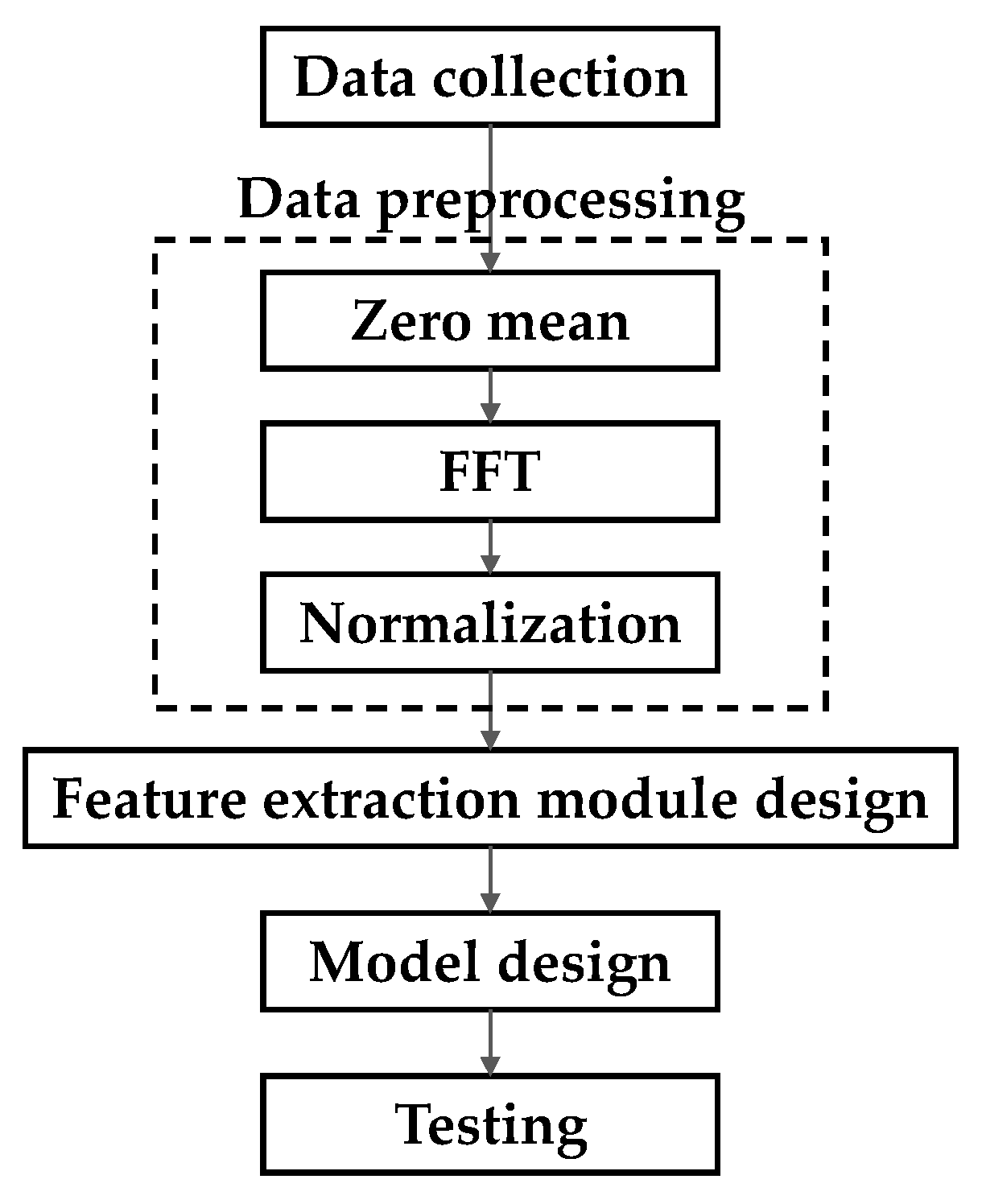
3.1. Data Collection and Signal Preprocessing
3.1.1. Data Collection
3.1.2. Signal Preprocessing
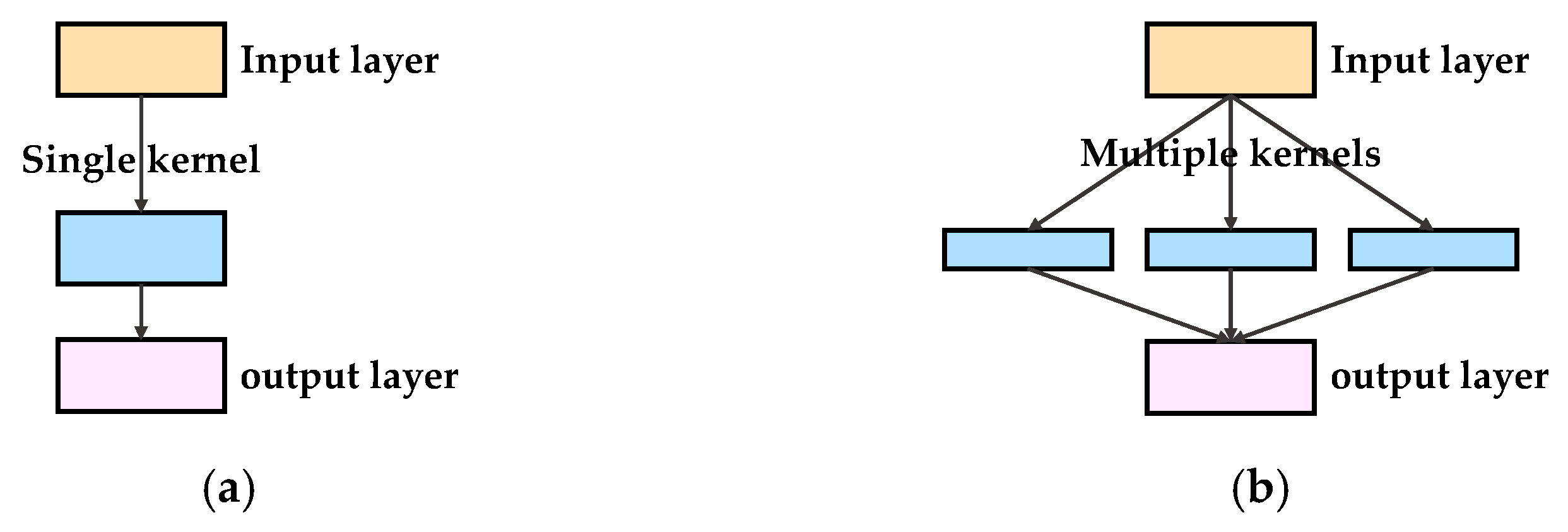
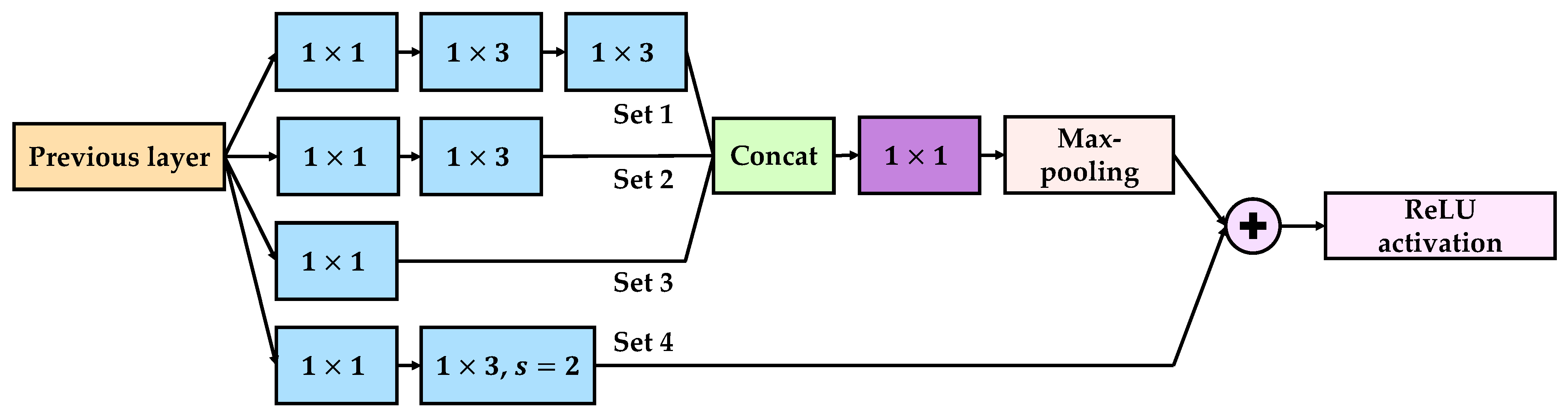
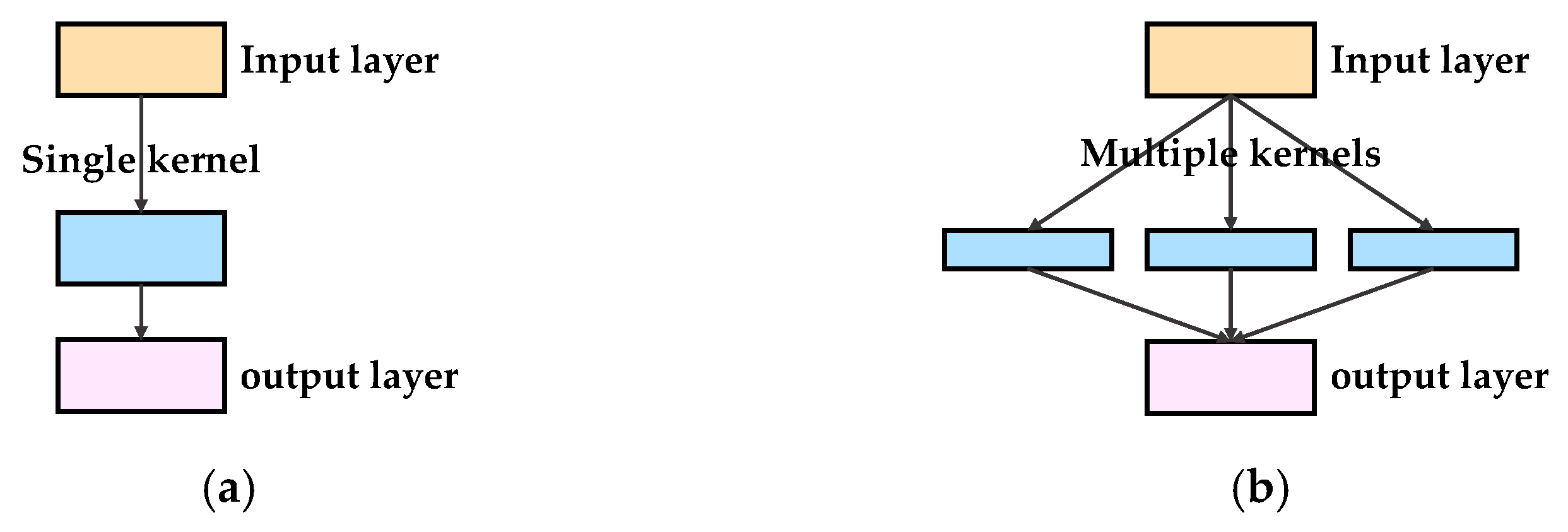
3.2. Feature-Extraction Module
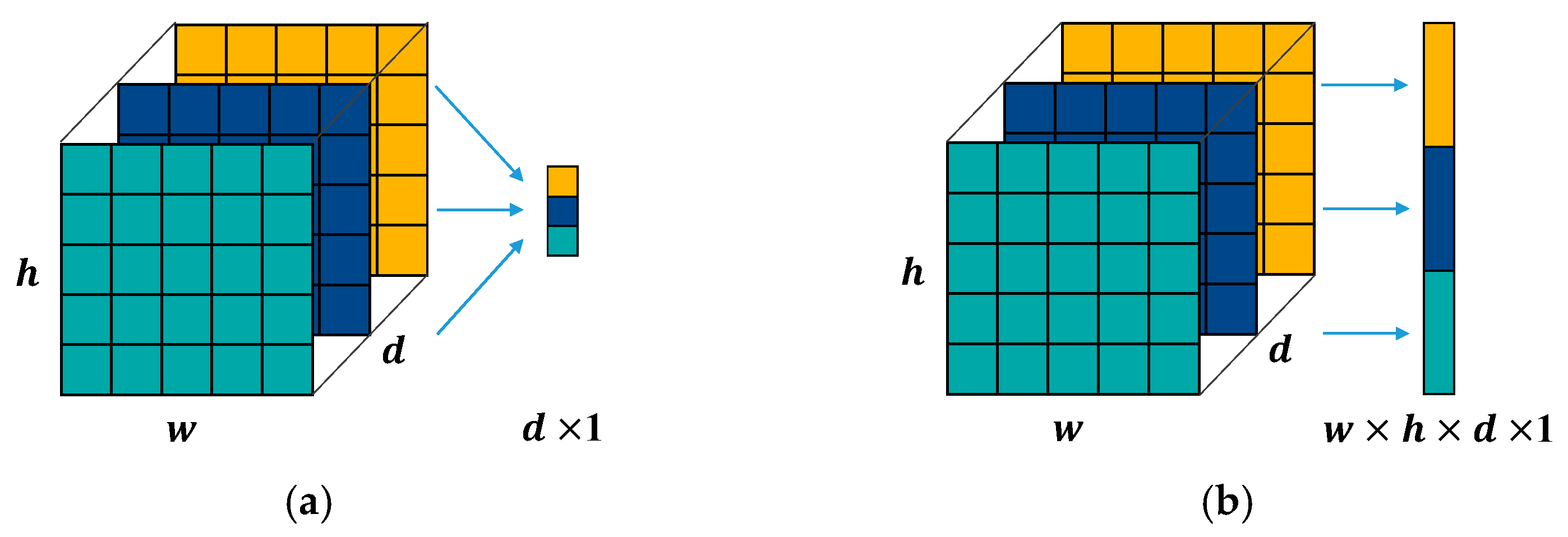
3.3. Global Average Pooling
3.4. Model Building
4. Experimental Results
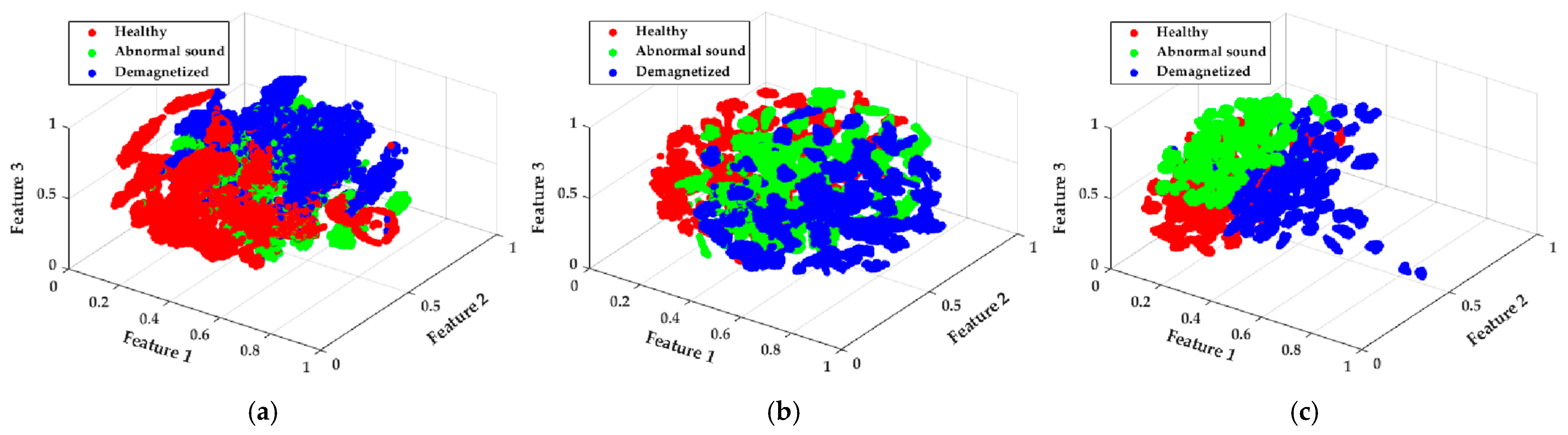
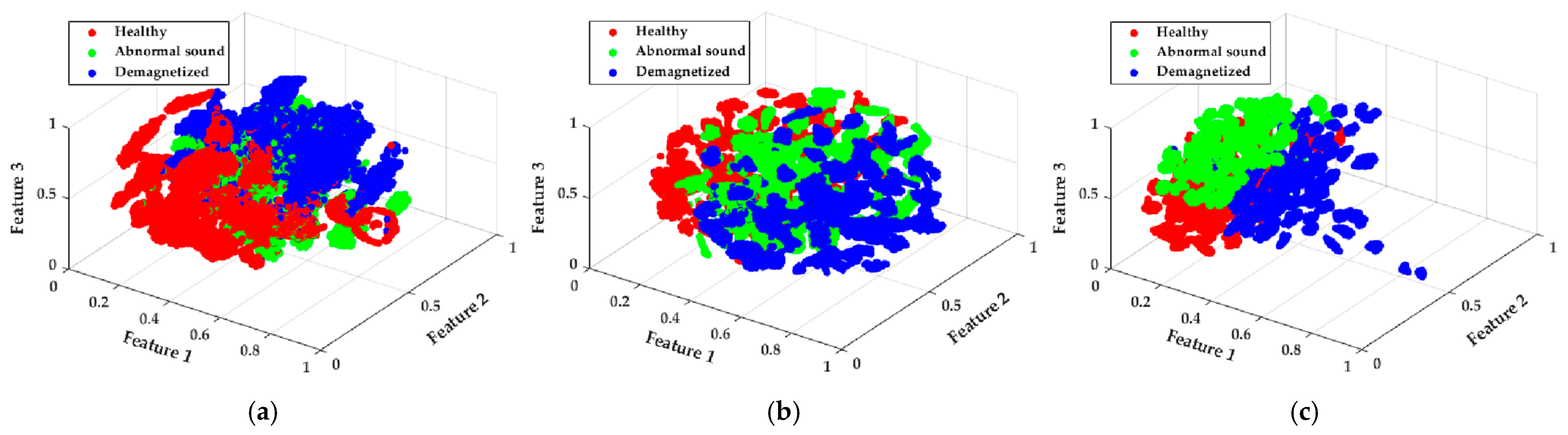
4.1. Classification Results
- SVM using the handcrafted features;
- KNN classifier using the handcrafted features;
- MLP: a two-input, two-output model;
- 1D CNNC: a one-input, two-output model based on the proposed method, but that only uses current signal;
- 1D CNNT: a one-input, two-output model based on the proposed method, but that only uses torque signal;
- Proposed 1D CNN using current and torque signals.
4.2. Important Frequency Component
4.3. Training Time and Prediction Speed
4.4. Computation System
5. Conclusions
5.1. Discussion of Results
5.2. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lei, Y.; Jia, F.; Lin, J.; Xing, S.; Ding, S.X. An Intelligent Fault Diagnosis Method Using Unsupervised Feature Learning towards Mechanical Big Data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- Gangsar, P.; Tiwari, R. Signal based condition monitoring techniques for fault detection and diagnosis of induction motors: A state-of-the-art review. Mech. Syst. Signal Process. 2020, 144, 106908. [Google Scholar] [CrossRef]
- Liang, X.; Ali, M.Z.; Zhang, H. Induction Motors Fault Diagnosis Using Finite Element Method: A Review. IEEE Trans. Ind. Appl. 2020, 56, 1205–1217. [Google Scholar] [CrossRef]
- Yassa, N.; Rachek, M.; Houassine, H. Motor Current Signature Analysis for the Air Gap Eccentricity Detection in the Squirrel Cage Induction Machines. Energy Procedia 2019, 162, 251–262. [Google Scholar] [CrossRef]
- Abdelkrim, C.; Meridjet, M.S.; Boutasseta, N.; Boulanouar, L. Detection and classification of bearing faults in industrial geared motors using temporal features and adaptive neuro-fuzzy inference system. Heliyon 2019, 5, e02046. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Xiong, J.; Zhu, X.; Zhang, Q.; Wang, S. Fault Diagnosis Method Based on Encoding Time Series and Convolutional Neural Network. IEEE Access 2020, 8, 165232–165246. [Google Scholar] [CrossRef]
- Zaman, S.M.K.; Liang, X. An Effective Induction Motor Fault Diagnosis Approach Using Graph-Based Semi-Supervised Learning. IEEE Access 2021, 9, 7471–7482. [Google Scholar] [CrossRef]
- Jafari, A.; Faiz, J.; Jarrahi, M.A. A simple and efficient current-based method for inter-turn fault detection in BLDC motors. IEEE Trans. Ind. Inform. 2021, 17, 2707–2715. [Google Scholar] [CrossRef]
- Shifat, T.A.; Hur, J.-W. ANN assisted multi sensor information fusion for BLDC motor fault diagnosis. IEEE Access 2021, 9, 9429–9441. [Google Scholar] [CrossRef]
- Cheng, L.; Tian, G.Y. Surface Crack Detection for Carbon Fiber Reinforced Plastic (CFRP) Materials Using Pulsed Eddy Current Thermography. IEEE Sens. J. 2011, 11, 3261–3268. [Google Scholar] [CrossRef]
- Kou, L.; Qin, Y.; Zhao, X.; Chen, X. A Multi-Dimension End-to-End CNN Model for Rotating Devices Fault Diagnosis on High-Speed Train Bogie. IEEE Trans. Veh. Technol. 2019, 69, 2513–2524. [Google Scholar] [CrossRef]
- Luo, B.; Wang, H.; Liu, H.; Li, B.; Peng, F. Early Fault Detection of Machine Tools Based on Deep Learning and Dynamic Identification. IEEE Trans. Ind. Electron. 2019, 66, 509–518. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, Z. Diagnosis of the three-phase induction motor using thermal imaging. Infrared Phys. Technol. 2017, 81, 7–16. [Google Scholar] [CrossRef]
- Glowacz, A. Acoustic based fault diagnosis of three-phase induction motor. Appl. Acoust. 2018, 137, 82–89. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, W.; Glowacz, Z.; Kozik, J. Early fault diagnosis of bearing and stator faults of the single-phase in-duction motor using acoustic signals. Measurement 2018, 113, 1–9. [Google Scholar] [CrossRef]
- Nivesrangsan, P.; Jantarajirojkul, D. Bearing fault monitoring by comparison with main bearing frequency components using vibration signal. In Proceedings of the 2018 5th International Conference on Business and Industrial Research (ICBIR), Bangkok, Thailand, 17–18 May 2018; pp. 292–296. [Google Scholar]
- Liu, Y.; Qiao, N.; Zhao, C.; Zhuang, J. Vibration Signal Prediction of Gearbox in High-Speed Train Based on Monitoring Data. IEEE Access 2018, 6, 50709–50719. [Google Scholar] [CrossRef]
- Zhang, Z.; Verma, A.; Kusiak, A. Fault Analysis and Condition Monitoring of the Wind Turbine Gearbox. IEEE Trans. Energy Convers. 2012, 27, 526–535. [Google Scholar] [CrossRef]
- Chen, X.; Feng, Z. Time-Frequency Analysis of Torsional Vibration Signals in Resonance Region for Planetary Gearbox Fault Diagnosis Under Variable Speed Conditions. IEEE Access 2017, 5, 21918–21926. [Google Scholar] [CrossRef]
- Bravo-Imaz, I.; Ardakani, H.D.; Liu, Z.; García-Arribas, A.; Arnaiz, A.; Lee, J. Motor current signature analysis for gearbox condition monitoring under transient speeds using wavelet analysis and dual-level time synchronous averaging. Mech. Syst. Signal Process. 2017, 94, 73–84. [Google Scholar] [CrossRef]
- Azamfar, M.; Singh, J.; Bravo-Imaz, I.; Lee, J. Multisensor data fusion for gearbox fault diagnosis using 2-D convolutional neural network and motor current signature analysis. Mech. Syst. Signal Process. 2020, 144, 106861. [Google Scholar] [CrossRef]
- Giantomassi, A.; Ferracuti, F.; Iarlori, S.; Ippoliti, G.; Longhi, S. Electric Motor Fault Detection and Diagnosis by Kernel Density Estimation and Kullback–Leibler Divergence Based on Stator Current Measurements. IEEE Trans. Ind. Electron. 2015, 62, 1770–1780. [Google Scholar] [CrossRef]
- Dias, C.G.; Pereira, F.H. Broken rotor bars detection in induction motors running at very low slip using a hall effect sensor. IEEE Sens. J. 2018, 18, 4602–4613. [Google Scholar] [CrossRef]
- Liu, H.; Zhou, J.; Xu, Y.; Zheng, Y.; Peng, X.; Jiang, W. Unsupervised fault diagnosis of rolling bearings using a deep neural network based on generative adversarial networks. Neurocomputing 2018, 315, 412–424. [Google Scholar] [CrossRef]
- Altobi, M.A.S.; Bevan, G.; Wallace, P.; Harrison, D.; Ramachandran, K. Fault diagnosis of a centrifugal pump using MLP-GABP and SVM with CWT. Eng. Sci. Technol. Int. J. 2019, 22, 854–861. [Google Scholar] [CrossRef]
- Moosavi, S.S.; Djerdir, A.; Amirat, Y.A.; Khaburi, D.A. ANN based fault diagnosis of permanent magnet synchronous motor under stator winding shorted turn. Electr. Power Syst. Res. 2015, 125, 67–82. [Google Scholar] [CrossRef]
- Ahmad, W.; Khan, S.A.; Kim, J.-M. A Hybrid Prognostics Technique for Rolling Element Bearings Using Adaptive Predictive Models. IEEE Trans. Ind. Electron. 2018, 65, 1577–1584. [Google Scholar] [CrossRef]
- Ali, M.Z.; Shabbir, M.N.S.K.; Liang, X.; Zhang, Y.; Hu, T. Machine learning-based fault diagnosis for single- and multi-faults in induction motors using measured stator currents and vibration signals. IEEE Trans. Ind. Appl. 2019, 55, 2378–2391. [Google Scholar] [CrossRef]
- Kao, I.-H.; Wang, W.-J.; Lai, Y.-H.; Perng, J.-W. Analysis of Permanent Magnet Synchronous Motor Fault Diagnosis Based on Learning. IEEE Trans. Instrum. Meas. 2018, 68, 310–324. [Google Scholar] [CrossRef]
- Shao, S.; Yan, R.; Lu, Y.; Wang, P.; Gao, R.X. DCNN-Based Multi-Signal Induction Motor Fault Diagnosis. IEEE Trans. Instrum. Meas. 2019, 69, 2658–2669. [Google Scholar] [CrossRef]
- Yao, D.; Liu, H.; Yang, J.; Li, X. A lightweight neural network with strong robustness for bearing fault diagnosis. Measurement 2020, 159, 107756. [Google Scholar] [CrossRef]
- Kumar, A.; Vashishtha, G.; Gandhi, C.P.; Zhou, Y.; Glowacz, A.; Xiang, J. Novel Convolutional Neural Network (NCNN) for the Diagnosis of Bearing Defects in Rotary Machinery. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Wang, J.; Fu, P.; Zhang, L.; Gao, R.X.; Zhao, R. Multilevel Information Fusion for Induction Motor Fault Diagnosis. IEEE/ASME Trans. Mechatron. 2019, 24, 2139–2150. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper with Convolutions. arXiv 2014, arXiv:1409.4842. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. arXiv 2015, arXiv:1512.00567. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A.A. Inception-v4, inception-ResNet and the impact of residual connections on learning. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Zhang, R.; Bahrami, Z.; Wang, T.; Liu, Z. An Adaptive Deep Learning Framework for Shipping Container Code Localization and Recognition. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Gong, W.; Chen, H.; Zhang, Z.; Zhang, M.; Gao, H. A Data-Driven-Based Fault Diagnosis Approach for Electrical Power DC-DC Inverter by Using Modified Convolutional Neural Network with Global Average Pooling and 2-D Feature Image. IEEE Access 2020, 8, 73677–73697. [Google Scholar] [CrossRef]
- Zhou, B.; Khosla, A.; Lapedriza, A.; Oliva, A.; Torralba, A. Learning Deep Features for Discriminative Localization. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 2921–2929. [Google Scholar]
- Qiu, S. Global weighted average pooling Bbridges pixel-level localization andimage-level classification. arXiv 2018, arXiv:1809.08264. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2012, 60, 1097–1105. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2017, arXiv:1412.6980. [Google Scholar]
- van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Motor Type | Operation Condition |
|---|---|---|
| 1 | Healthy motor | Loading conditions: 0 Nm, 0.24 Nm, and 0–0.24 Nm |
| 2 | Demagnetized motor | Rotating speeds: 100–1600 rpm |
| 3 | Motor with bearing fault | Eccentricity: Yes and no |
| Size of the input signal | 6400 × 1 |
| Input size of the 1st feature-extraction module | 6400 × 1 |
| Input size of the 2nd feature-extraction module | 3200 × 6 |
| Input size of the 3rd feature-extraction module | 1600 × 12 |
| Input size of the 4th feature-extraction module | 800 × 12 |
| Input size of the 5th feature-extraction module | 400 × 29 |
| Input size of the 6th feature-extraction module | 200 × 29 |
| Input size of the 7th feature-extraction module | 100 × 93 |
| Input size of the WGAP layer | 50 × 124 |
| Input size of the concatenate layer: (1) WGAP 1 current signal | 124 |
| (2) WGAP 2 torque signal | 124 |
| Dropout layer 1 and dropout layer 2 | |
| Input size of the output layer 1 | 248 |
| Input size of the output layer 2 | 248 |
| The output size of the output layer 1 (failure mode classification) | 3 |
| The output size of the output layer 2 (eccentricity detection) | 2 |
| Number of samples for training | 115,200 |
| Number of samples for testing | 28,800 |
| Learning rate | 3 × 10−4 |
| Dropout ratio | 0.2 |
| Index of the Feature Extraction Module | Number of Kernel | |||||||
|---|---|---|---|---|---|---|---|---|
| Set 1 | Set 2 | Set 3 | Set 4 | |||||
| 1 | 1 | 2 | 3 | 1 | 2 | 1 | 2 | 6 |
| 2 | 2 | 4 | 6 | 2 | 4 | 2 | 4 | 12 |
| 3 | 2 | 4 | 6 | 2 | 4 | 2 | 4 | 12 |
| 4 | 5 | 10 | 15 | 4 | 10 | 4 | 10 | 29 |
| 5 | 5 | 10 | 15 | 4 | 10 | 4 | 10 | 29 |
| 6 | 15 | 30 | 48 | 15 | 30 | 15 | 31 | 98 |
| 7 | 24 | 32 | 64 | 24 | 36 | 24 | 41 | 124 |
| Index | Features | Formations |
|---|---|---|
| 1 | Mean | |
| 2 | Median | |
| 3 | Standard deviation | |
| 4 | Median absolute deviation | |
| 5 | Mean absolute deviation | |
| 6 | Percentage of energy | |
| 7 | The maximum amplitude of the time-domain signal | |
| 8 | The maximum amplitude of the frequency-domain signal |
| Method | Accuracy Rate | |||||
|---|---|---|---|---|---|---|
| Healthy | Bearing Fault | Demagnetized | with No Eccentricity | with Eccentricity | Average | |
| KNN | 98.12% | 94.44% | 90.45% | 86.57% | 80.60% | 88.96% |
| SVM | 99.72% | 99.96% | 99.72% | 89.23% | 89.65% | 94.66% |
| MLP | 95.12% | 88.78% | 96.18% | 88.02% | 84.50% | 89.81% |
| 1D CNNG | 100.00% | 99.89% | 99.18% | 99.60% | 74.49% | 93.36% |
| 1D CNNT | 94.73% | 87.58% | 88.93% | 87.89% | 90.52% | 89.80% |
| 1D CNNC | 99.68% | 98.78% | 98.33% | 92.28% | 89.07% | 94.80% |
| Proposed 1D CNN | 99.89% | 99.90% | 99.19% | 97.59% | 98.49% | 98.85% |
| Models | Training Time (min) | Prediction Time (s) |
|---|---|---|
| KNN | 0.09 | 0.0210 |
| SVM | 9.32 | 0.0045 |
| MLP | 16.28 | 0.0235 |
| 1D CNNG | 33.28 | 0.0254 |
| 1D CNNT | 127.92 | 0.0266 |
| 1D CNNC | 120.93 | 0.0263 |
| Proposed 1D CNN | 85.06 | 0.0335 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.-S.; Kao, I.-H.; Perng, J.-W. Fault Diagnosis and Fault Frequency Determination of Permanent Magnet Synchronous Motor Based on Deep Learning. Sensors 2021, 21, 3608. https://doi.org/10.3390/s21113608
Wang C-S, Kao I-H, Perng J-W. Fault Diagnosis and Fault Frequency Determination of Permanent Magnet Synchronous Motor Based on Deep Learning. Sensors. 2021; 21(11):3608. https://doi.org/10.3390/s21113608
Chicago/Turabian StyleWang, Chiao-Sheng, I-Hsi Kao, and Jau-Woei Perng. 2021. "Fault Diagnosis and Fault Frequency Determination of Permanent Magnet Synchronous Motor Based on Deep Learning" Sensors 21, no. 11: 3608. https://doi.org/10.3390/s21113608
APA StyleWang, C.-S., Kao, I.-H., & Perng, J.-W. (2021). Fault Diagnosis and Fault Frequency Determination of Permanent Magnet Synchronous Motor Based on Deep Learning. Sensors, 21(11), 3608. https://doi.org/10.3390/s21113608