
ECS-NL: An Enhanced Cuckoo Search Algorithm for Node Localisation in Wireless Sensor Networks

 ,
,  ,
,  , and
, and 
Abstract
1. Introduction
2. System Model
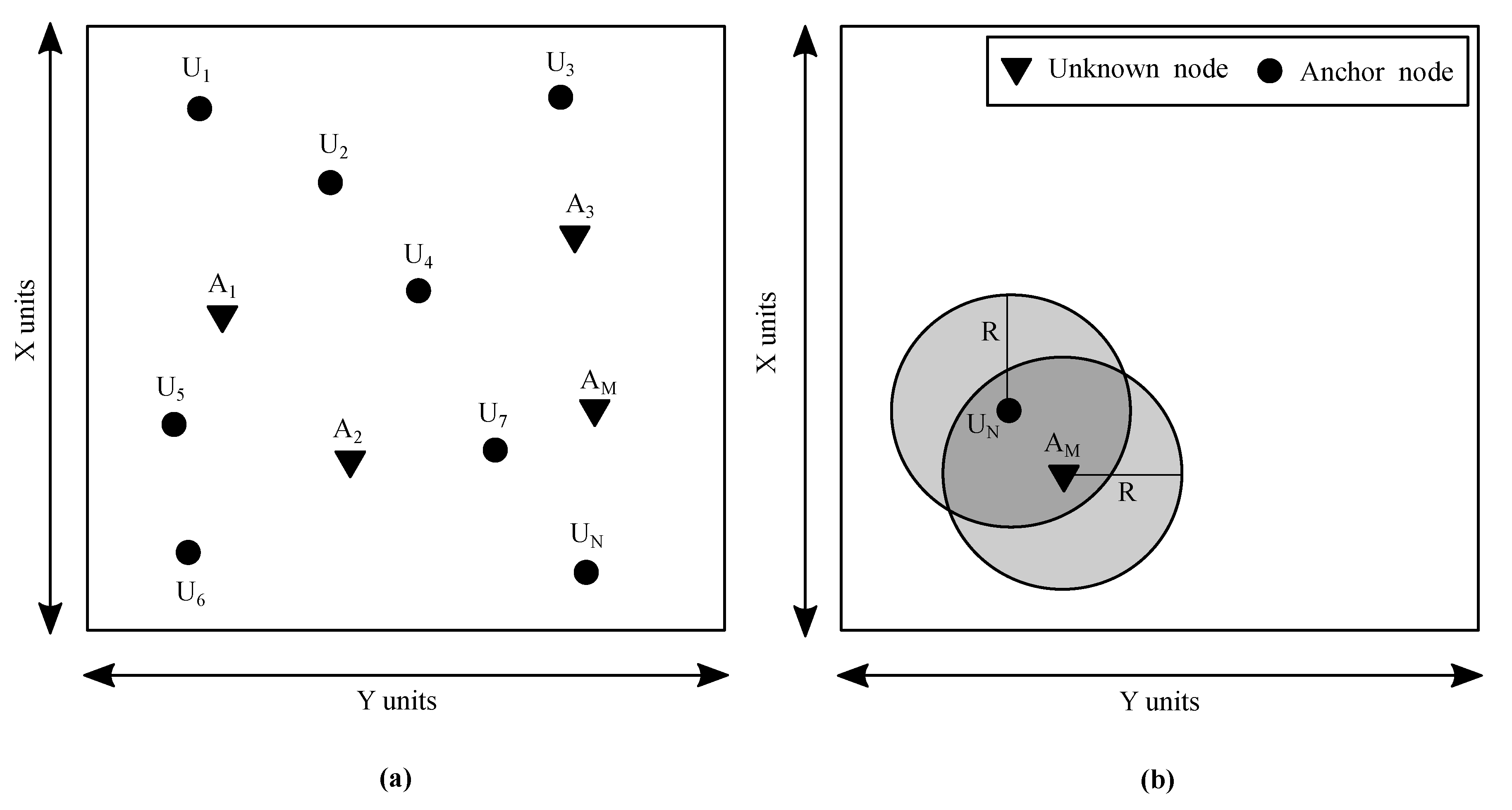
2.1. System Architecture
2.2. Distance Calculation Model
2.3. Operation Scenarios
- (i)
- Most Likely ScenarioThis scenario is most likely to happen during the testing phase. Here, M number of anchor nodes and N number of unknown nodes would be placed randomly and each unknown node would call the ECS algorithm to localise itself. In this way, all the nodes are likely to localise themselves using the ECS node localisation process. The ranging error between any two arbitrary nodes depends on the Euclidean distance between them and is independent of the ranging error between any other two nodes of the network.
- (ii)
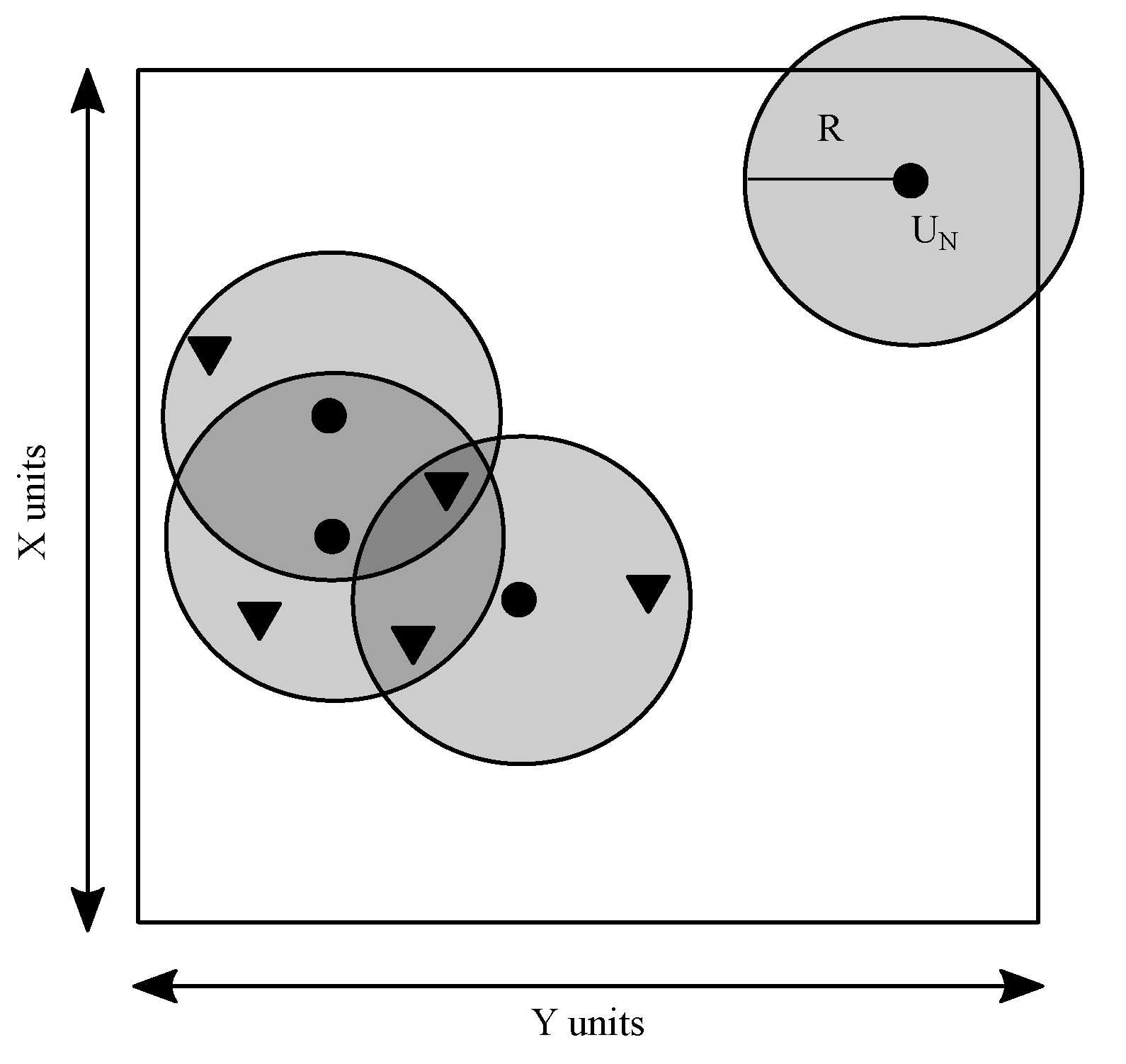
- Diverse ScenarioThis scenario is infrequent to be implemented in a network, yet essential to consider. Any unknown node requires at least three or more anchor nodes within its transmission range to become localised. This scenario occurs when an unknown node gets deployed in a deserted area with no minimum anchor nodes around it, which prohibits the unknown node from getting localised. Figure 2 illustrates the diverse scenario of operation, which is also the limitation scenario of node deployment and is outside the control domain of node localisation. Consequently, the unknown nodes would remain unlocalised.
2.4. Optimisation Problem Formulation
2.5. ECS Algorithm
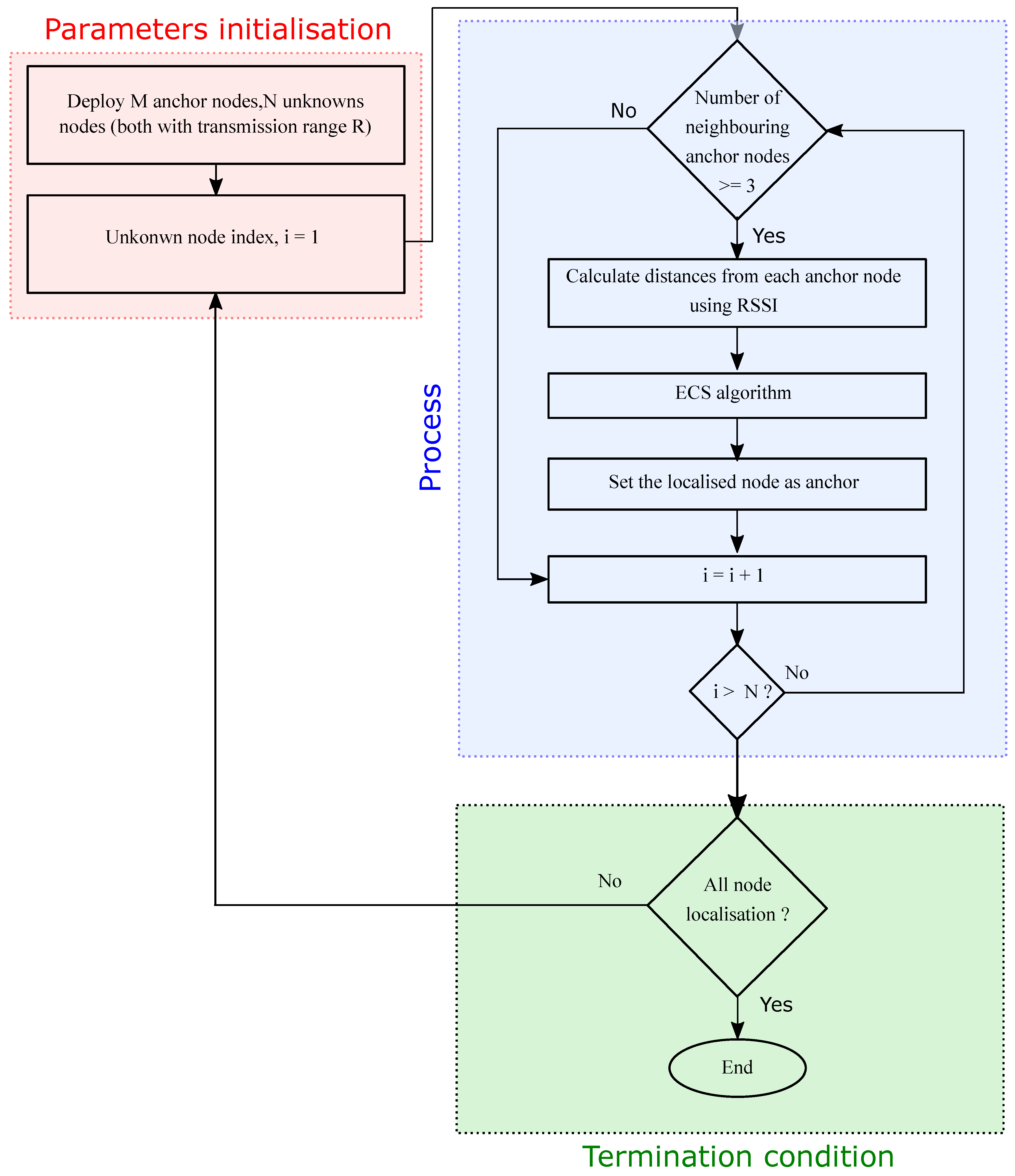
2.6. Proposed Node Localisation Process in WSNs
- Deploy a finite M number of anchor nodes and N number of unknown nodes; each node is assumed to have a homogeneous transmission range equal to R.
- Establish the objective function using Equation (5).
- Each unknown node attempts to localise itself by running the ECS algorithm independently.
- ECS algorithm estimates the optimal positions for all the localisable nodes by minimising the ranging error. After getting localised, each unknown node starts acting as an anchor node and helps other localisable nodes get localised, indicating the increase in the number of anchor nodes as the iteration count progresses.
- Repeat steps 2–5 until all the localisable nodes become localised.
- The performance of the node localisation process is analysed in terms of ALE and Localisation Success Ratio (LSR). These parameters are discussed in the simulation analysis in Section 3.1.
| Algorithm 1:ECS algorithm |
 |
3. Simulation Experiment
3.1. Simulation Analysis Parameters
- Average Localisation Error (ALE)ALE indicates how effectively the localisation technique estimates the position of the unknown nodes of the network. ALE is defined as the mean of the Euclidean distance between the estimated node location and the actual unknown node location of the sensor nodes, as shown by Equation (7)where , and represent the number of localised nodes, estimated node position and the actual position of the unknown node, respectively. It is impossible to eliminate ALE because of the non-zero ranging error between two nodes, which manipulates the distance calculation of the unknown node. The ranging error diminishes the probability of the anchor nodes being placed at the exact position of unknown nodes. Therefore, ALE should be as small as possible. Here, a lower value of the ALE represents higher accuracy of the localisation algorithm.
- Localisation Success Ratio (LSR)LSR is defined as the ratio of the number of localised nodes to the total number of unknown nodes in the network and can be calculated by Equation (8):A higher value of LSR represents that the localisation algorithm performs better.
3.2. Simulation Setup
4. Simulation Results and Analysis
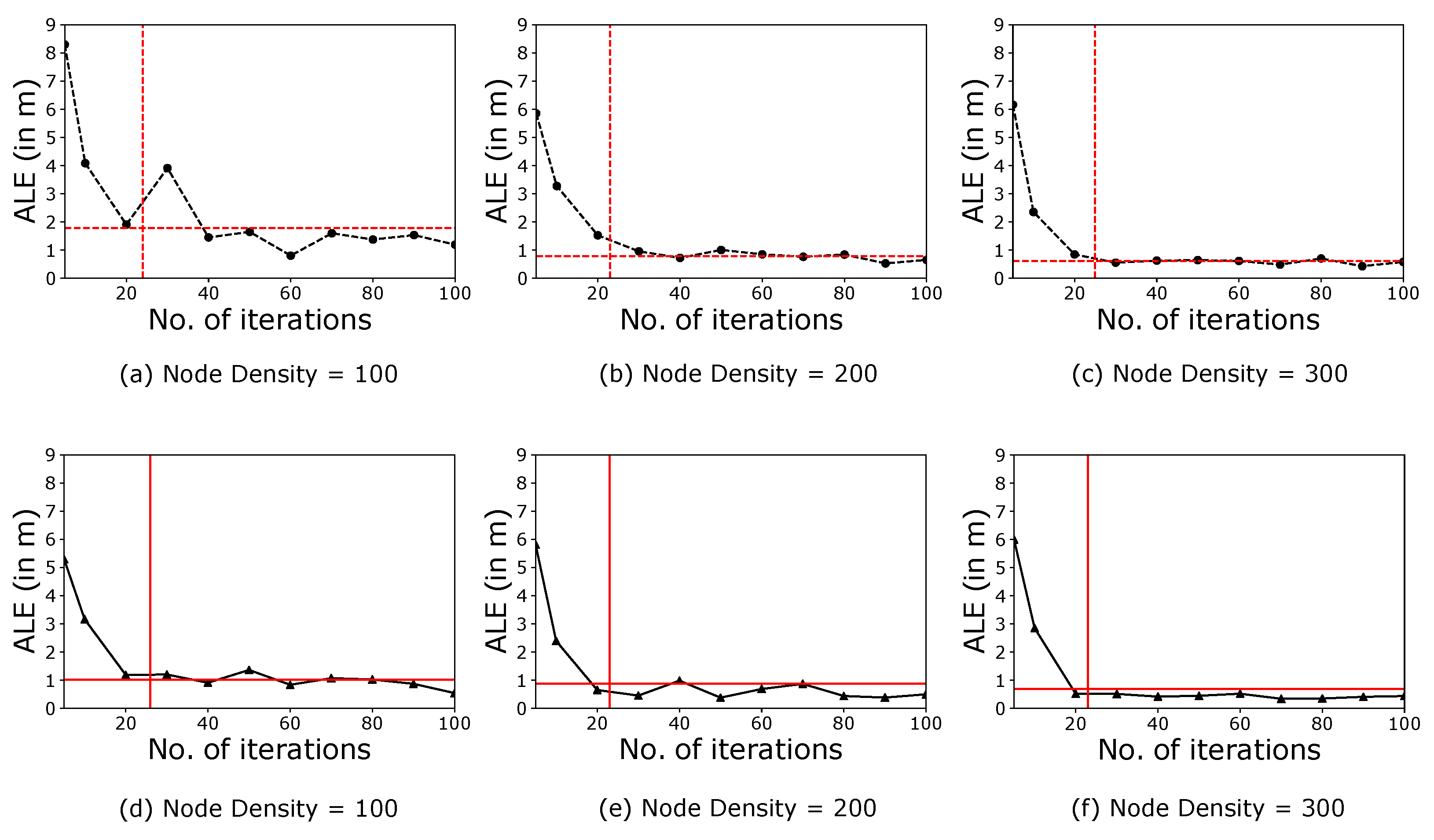
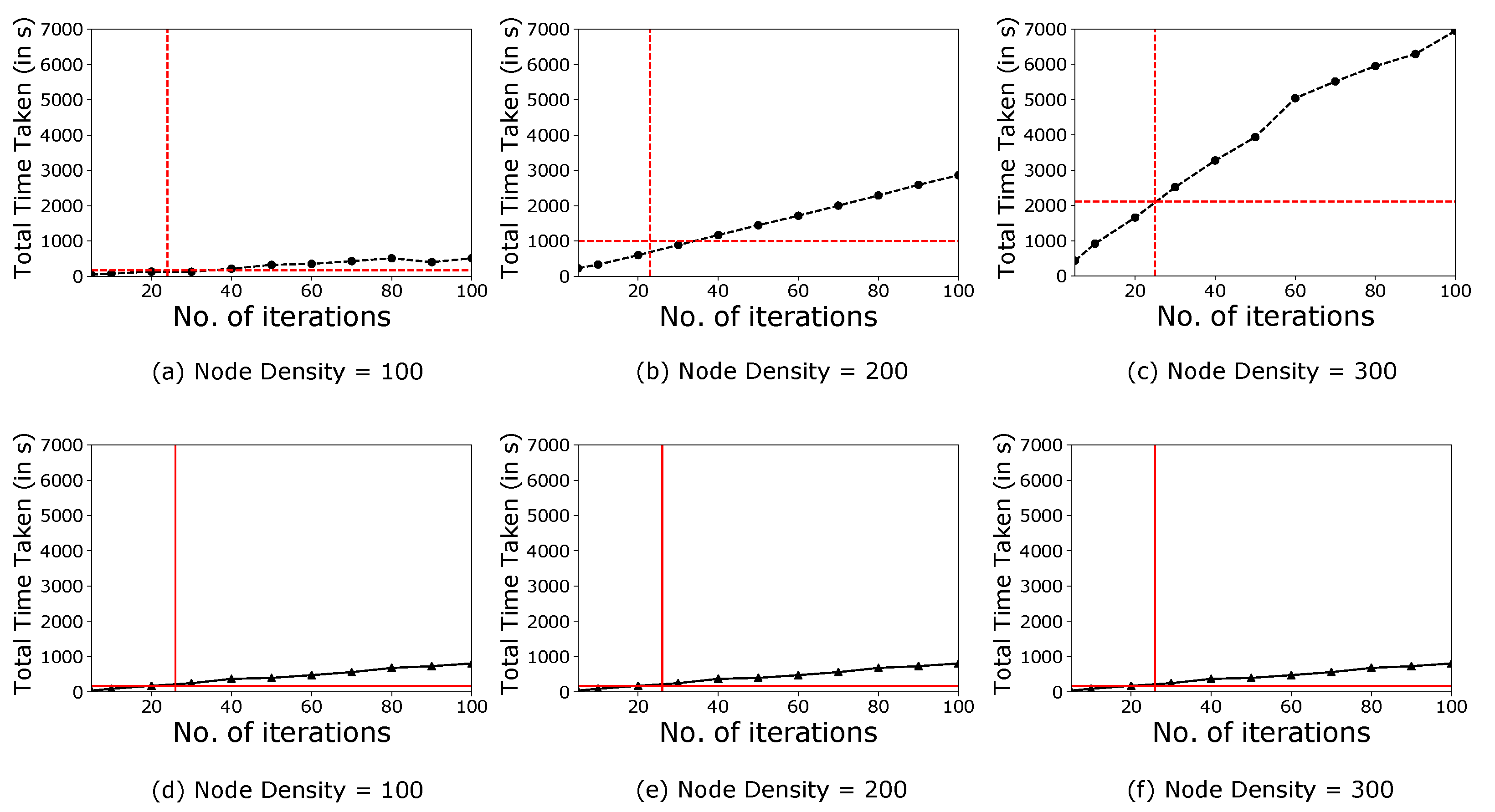
4.1. The Impact of the ES Criterion
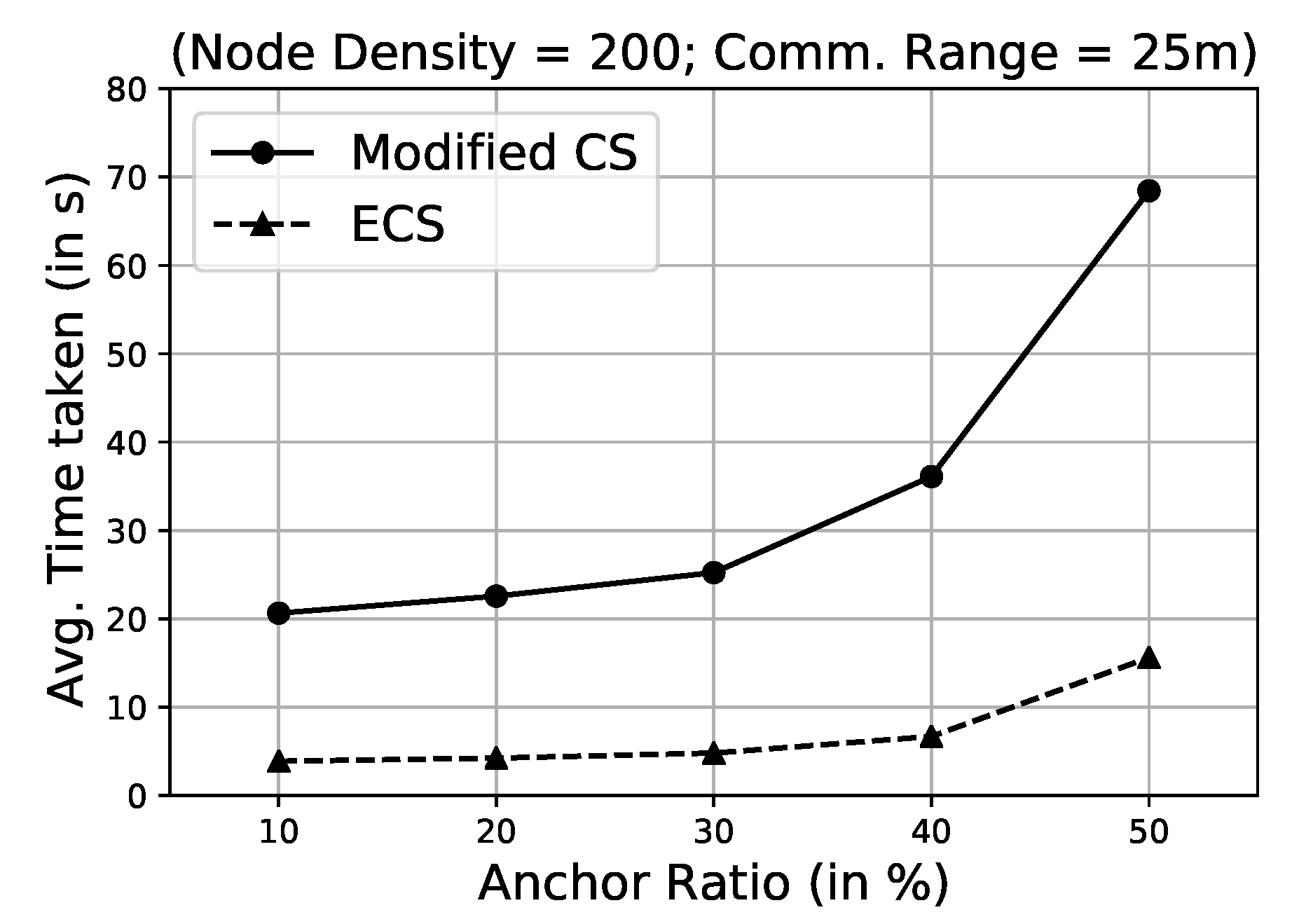
4.2. Comparison of Modified CS and ECS Algorithm
4.3. Dependency of ECS Algorithm on Anchor Density
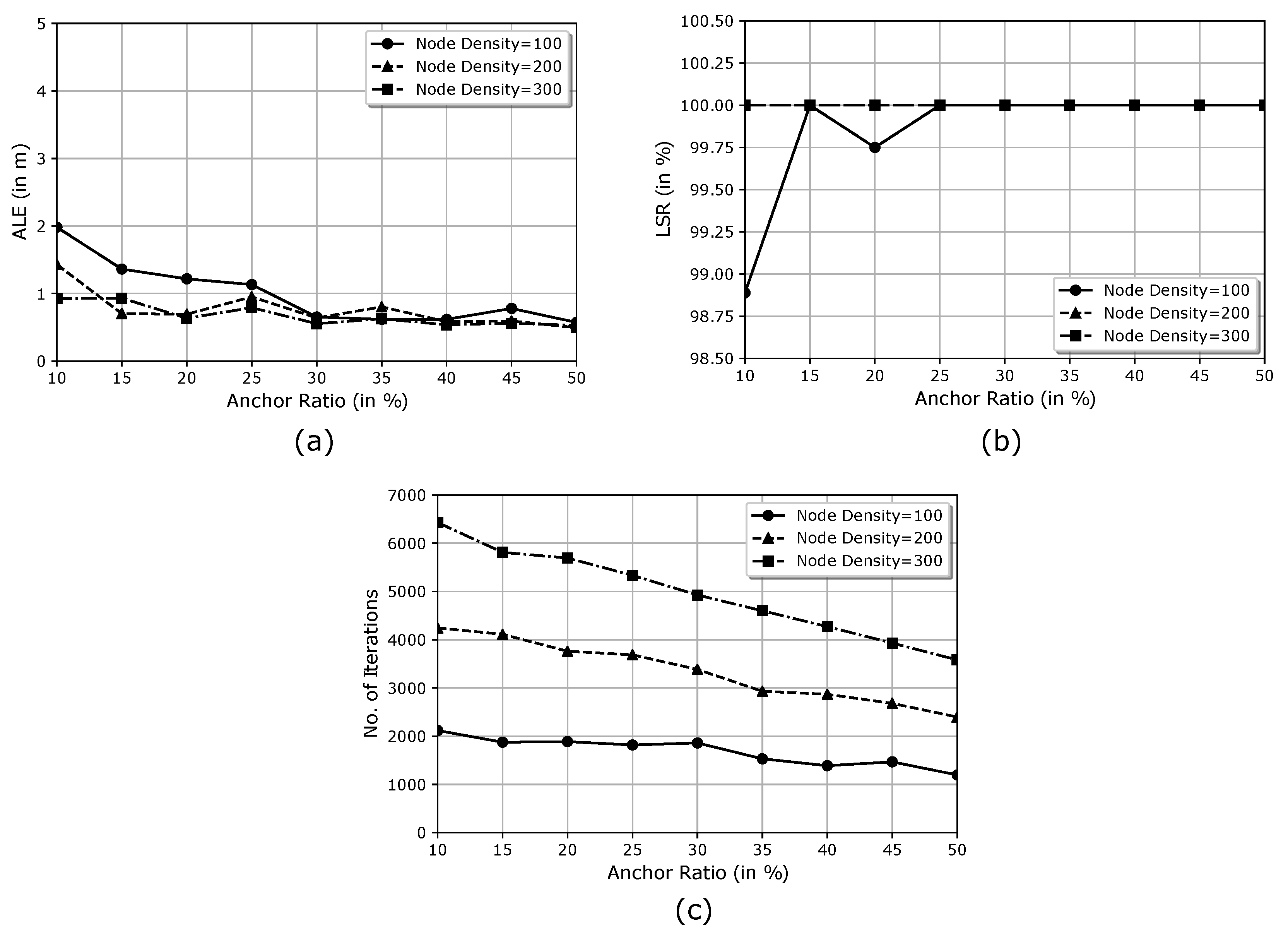
- ALEFigure 7a displays the variation effect of the anchor ratio on ALE. We found that the ALE decreases with an increase in the anchor ratio from to . However, the value of ALE does not vary much with the anchor ratio, as it remains between 0.5 m and 2 m. Furthermore, the value of ALE decreases as the node density increases. This decrease owes to the network connectivity getting better with the increase in population density of the nodes.
- LSRFigure 7b shows the variation of the anchor density on LSR for different node densities in the network. We found that the ECS algorithm can localise all the localisable nodes with an anchor ratio of just and node density of 100 nodes. As the node density increases to 200 nodes, the ECS algorithm can localise all the unknown nodes present in the network with an anchor ratio of a mere . A similar trend is observed when the node density is increased to 300. In Figure 7b, the observation points overlap each other for node density 200 and 300. Therefore, we can reduce the network cost using the ECS algorithm and make it less dependent on the GPS-assisted nodes.
- Number of Iterations ()Figure 7c demonstrates that the number of iterations required to localise all the possibly localisable nodes decreases with increasing anchor ratio. This trend is observed because the number of unknown nodes to be localised reduces as the anchor ratio increases from to . As we increase the node density, the required number of iteration also increases.
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Amutha, J.; Sharma, S.; Nagar, J. WSN strategies based on sensors, deployment, sensing models, coverage and energy efficiency: Review, approaches and open issues. Wirel. Pers. Commun. 2020, 111, 1089–1115. [Google Scholar] [CrossRef]
- Matin, M.A.; Islam, M. Overview of wireless sensor network. In Wireless Sensor Networks-Technology and Protocols; IntechOpen: London, UK, 2012; pp. 1–3. [Google Scholar]
- Singh, A.; Gaurav, K.; Meena, G.K.; Kumar, S. Estimation of soil moisture applying modified dubois model to Sentinel-1; a regional study from central India. Remote Sens. 2020, 12, 2266. [Google Scholar] [CrossRef]
- Sharma, S.; Nagar, J. Intrusion Detection in Mobile Sensor Networks: A Case Study for Different Intrusion Paths. Wirel. Pers. Commun. 2020, 115, 2569–2589. [Google Scholar] [CrossRef]
- DJurivsić, M.P.; Tafa, Z.; Dimić, G.; Milutinović, V. A survey of military applications of wireless sensor networks. In Proceedings of the 2012 Mediterranean Conference on Embedded Computing (MECO), Bar, Montenegro, 19–21 June 2012; pp. 196–199. [Google Scholar]
- Kim, D.S.; Tran-Dang, H. Wireless Sensor Networks for Industrial Applications. In Industrial Sensors and Controls in Communication Networks; Springer: Berlin/Heidelberg, Germany, 2019; pp. 127–140. [Google Scholar]
- Pant, D.; Verma, S.; Dhuliya, P. A study on disaster detection and management using WSN in Himalayan region of Uttarakhand. In Proceedings of the 2017 3rd International Conference on Advances in Computing, Communication & Automation (ICACCA) (Fall), Dehradun, India, 15–16 September 2017; pp. 1–6. [Google Scholar]
- Prakash, S. An overview of healthcare perspective based security issues in Wireless Sensor Networks. In Proceedings of the 2016 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; pp. 870–875. [Google Scholar]
- Kim, S.; Pakzad, S.; Culler, D.; Demmel, J.; Fenves, G.; Glaser, S.; Turon, M. Health monitoring of civil infrastructures using wireless sensor networks. In Proceedings of the 6th International Conference on Information Processing in Sensor Networks, Cambridge, MA, USA, 25–27 April 2007; pp. 254–263. [Google Scholar]
- Ghayvat, H.; Mukhopadhyay, S.; Gui, X.; Liu, J. Enhancement of WSN based smart home to a smart building for assisted living: Design issues. In Proceedings of the 2015 Fifth International Conference on Communication Systems and Network Technologies, Gwalior, India, 4–6 April 2015; pp. 219–224. [Google Scholar]
- Singh, A.; Sharma, S.; Singh, J. Nature-inspired algorithms for wireless sensor networks: A comprehensive survey. Comput. Sci. Rev. 2021, 39, 100342. [Google Scholar] [CrossRef]
- Singh, A.; Nagar, J.; Sharma, S.; Kotiyal, V. A Gaussian process regression approach to predict the k-barrier coverage probability for intrusion detection in wireless sensor networks. Expert Syst. Appl. 2021, 172, 114603. [Google Scholar] [CrossRef]
- Zhang, J.; Li, W.; Yin, Z.; Liu, S.; Guo, X. Forest fire detection system based on wireless sensor network. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009; pp. 520–523. [Google Scholar]
- Bouabdellah, K.; Noureddine, H.; Larbi, S. Using wireless sensor networks for reliable forest fires detection. Procedia Comput. Sci. 2013, 19, 794–801. [Google Scholar] [CrossRef]
- Singh, A.; Kotiyal, V.; Sharma, S.; Nagar, J.; Lee, C.C. A Machine Learning Approach to Predict the Average Localization Error With Applications to Wireless Sensor Networks. IEEE Access 2020, 8, 208253–208263. [Google Scholar] [CrossRef]
- Mao, G. Localization Algorithms and Strategies for Wireless Sensor Networks: Monitoring and Surveillance Techniques for Target Tracking: Monitoring and Surveillance Techniques for Target Tracking; IGI Global: Hershey, PA, USA, 2009. [Google Scholar]
- Zhang, X.; Tepedelenlioglu, C.; Banavar, M.; Spanias, A. Node localization in wireless sensor networks. Synth. Lect. Commun. 2016, 9, 1–62. [Google Scholar] [CrossRef]
- Forster, A. Localization Techniques. In Introduction to Wireless Sensor Networks; Wiley-IEEE Press: Hoboken, NJ, USA, 2016; pp. 123–134. [Google Scholar]
- Lee, J.H.; Buehrer, R.M. Fundamentals of Received Signal Strength-Based Position Location. In Handbook of Position Location: Theory, Practice, and Advances; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 359–394. [Google Scholar]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS). In Proceedings of the GLOBECOM’01. IEEE Global Telecommunications Conference (Cat. No. 01CH37270), San Antonio, TX, USA, 25–29 November 2001; Volume 5, pp. 2926–2931. [Google Scholar]
- Shang, Y.; Ruml, W.; Zhang, Y.; Fromherz, M.P. Localization from mere connectivity. In Proceedings of the 4th ACM International Symposium on Mobile Ad Hoc Networking & Computing, Annapolis, MD, USA, 1–3 June 2003; pp. 201–212. [Google Scholar]
- Shang, Y.; Ruml, W. Improved MDS-based localization. In Proceedings of the IEEE INFOCOM 2004, Hong Kong, China, 7–11 March 2004; Volume 4, pp. 2640–2651. [Google Scholar]
- Lei, Y.; Zhang, Y.; Zhao, Y. The Research of Coverage Problems in Wireless Sensor Network. In Proceedings of the 2009 International Conference on Wireless Networks and Information Systems, Shanghai, China, 28–29 December 2009; pp. 31–34. [Google Scholar]
- Biswas, P.; Lian, T.C.; Wang, T.C.; Ye, Y. Semidefinite programming based algorithms for sensor network localization. ACM Trans. Sens. Netw. TOSN 2006, 2, 188–220. [Google Scholar] [CrossRef]
- Blum, C.; Roli, A. Metaheuristics in combinatorial optimization: Overview and conceptual comparison. ACM Comput. Surv. CSUR 2003, 35, 268–308. [Google Scholar] [CrossRef]
- Strumberger, I.; Minovic, M.; Tuba, M.; Bacanin, N. Performance of elephant herding optimization and tree growth algorithm adapted for node localization in wireless sensor networks. Sensors 2019, 19, 2515. [Google Scholar] [CrossRef]
- Kaur, R.; Arora, S. Nature Inspired Range Based Wireless Sensor Node Localization Algorithms. Int. J. Interact. Multimed. Artif. Intell. 2017, 4, 7–17. [Google Scholar] [CrossRef]
- Arsic, A.; Tuba, M.; Jordanski, M. Fireworks algorithm applied to wireless sensor networks localization problem. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 4038–4044. [Google Scholar]
- Yang, Q. A new localization method based on improved particle swarm optimization for wireless sensor networks. IET Softw. 2021. [Google Scholar] [CrossRef]
- Gopakumar, A.; Jacob, L. Localization in wireless sensor networks using particle swarm optimization. In Proceedings of the IET International Conference on Wireless, Mobile and Multimedia Networks, Mumbai, India, 11–12 January 2008. [Google Scholar]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the MHS’95 Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Cao, Y.; Zhang, H.; Li, W.; Zhou, M.; Zhang, Y.; Chaovalitwongse, W.A. Comprehensive learning particle swarm optimization algorithm with local search for multimodal functions. IEEE Trans. Evol. Comput. 2018, 23, 718–731. [Google Scholar] [CrossRef]
- Bi, J.; Yuan, H.; Duanmu, S.; Zhou, M.C.; Abusorrah, A. Energy-optimized Partial Computation Offloading in Mobile Edge Computing with Genetic Simulated-annealing-based Particle Swarm Optimization. IEEE Internet Things J. 2020, 8, 3774–3785. [Google Scholar] [CrossRef]
- Yoon, Y.; Kim, Y.H. An efficient genetic algorithm for maximum coverage deployment in wireless sensor networks. IEEE Trans. Cybern. 2013, 43, 1473–1483. [Google Scholar] [CrossRef]
- Goyal, S.; Patterh, M.S. Flower pollination algorithm based localization of wireless sensor network. In Proceedings of the 2015 2nd International Conference on Recent Advances in Engineering & Computational Sciences (RAECS), Chandigarh, India, 21–22 December 2015; pp. 1–5. [Google Scholar]
- Goyal, S.; Patterh, M.S. Wireless sensor network localization based on cuckoo search algorithm. Wirel. Pers. Commun. 2014, 79, 223–234. [Google Scholar] [CrossRef]
- Cheng, J.; Xia, L. An effective Cuckoo search algorithm for node localization in wireless sensor network. Sensors 2016, 16, 1390. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.S.; Deb, S. Cuckoo search via Lévy flights. In Proceedings of the 2009 World congress on nature & biologically inspired computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Kurt, S.; Tavli, B. Path-Loss Modeling for Wireless Sensor Networks: A review of models and comparative evaluations. IEEE Antennas Propag. Mag. 2017, 59, 18–37. [Google Scholar] [CrossRef]
- Nagar, J.; Chaturvedi, S.K.; Soh, S. Connectivity analysis of finite wireless multihop networks incorporating boundary effects in shadowing environments. IET Commun. 2020, 14, 3686. [Google Scholar] [CrossRef]
- Dhivya, M.; Sundarambal, M. Cuckoo search for data gathering in wireless sensor networks. Int. J. Mob. Commun. 2011, 9, 642–656. [Google Scholar] [CrossRef]
- Singh, A.; Sharma, S.; Singh, J.; Kumar, R. Mathematical modelling for reducing the sensing of redundant information in WSNs based on biologically inspired techniques. J. Intell. Fuzzy Syst. 2019, 37, 6829–6839. [Google Scholar] [CrossRef]
- Zachariah, U.E.; Kuppusamy, L. A hybrid approach to energy efficient clustering and routing in wireless sensor networks. Evol. Intell. 2021, 1–13. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameter | Description | Value |
|---|---|---|
| Deployment Area (in m) | The application area of the WSN where all the sensor nodes are deployed | 100 × 100 |
| Node Density | It is defined as the total number of sensor nodes in the given test area | 100, 200, 300 |
| Anchor Ratio (in %) | Percentage of anchor nodes out of the total nodes in the network | 10, 20, 30, 40, 50 |
| Communication Range (in m) | The distance up to which a sensor node can communicate | 10, 20, 30, 40, 50 |
| Step size | 0.9–1.0 | |
| Mutation probability | 0.05–0.25 | |
| Number of candidate solutions | 25 | |
| Maximum number of iterations allowed to localise each unknown node | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kotiyal, V.; Singh, A.; Sharma, S.; Nagar, J.; Lee, C.-C. ECS-NL: An Enhanced Cuckoo Search Algorithm for Node Localisation in Wireless Sensor Networks. Sensors 2021, 21, 3576. https://doi.org/10.3390/s21113576
Kotiyal V, Singh A, Sharma S, Nagar J, Lee C-C. ECS-NL: An Enhanced Cuckoo Search Algorithm for Node Localisation in Wireless Sensor Networks. Sensors. 2021; 21(11):3576. https://doi.org/10.3390/s21113576
Chicago/Turabian StyleKotiyal, Vaibhav, Abhilash Singh, Sandeep Sharma, Jaiprakash Nagar, and Cheng-Chi Lee. 2021. "ECS-NL: An Enhanced Cuckoo Search Algorithm for Node Localisation in Wireless Sensor Networks" Sensors 21, no. 11: 3576. https://doi.org/10.3390/s21113576
APA StyleKotiyal, V., Singh, A., Sharma, S., Nagar, J., & Lee, C.-C. (2021). ECS-NL: An Enhanced Cuckoo Search Algorithm for Node Localisation in Wireless Sensor Networks. Sensors, 21(11), 3576. https://doi.org/10.3390/s21113576