3.3. Optimizing the Smoothing Parameters
The
d diagonal elements of the matrix
play an important role in determining the accuracy of
in Equation (
2) [
18]. If these smoothing parameters are too small then
will be composed of spikes near the
samples and if these parameters are too large then the resulting
will be overly smooth. Cross-validation techniques have been developed to optimize the smoothing parameters by maximizing the likelihood of a set of
vectors after building the estimate using other
vectors [
21]. An example of these techniques is leave-one-out cross-validation [
16] in which the likelihood of each sample is computed after using the other samples to compute the kernel density estimate. We will take a similar but more efficient approach in this work to accommodate the size of our data set.
Let
be the d-dimensional vector of diagonal elements of
We partition the
n measured
vectors into an odd group and an even group depending on whether the vector was acquired in a game starting on an odd or even day of the month. Let
be the smaller of the sizes of the two groups. The validation set
is defined as the first
vectors
from the odd group and the validation set
is defined as the first
vectors
from the even group. For set
we find
using the
vectors
that are not in
as a function of the vector
The optimal
for
is defined as the vector
that maximizes the pseudolikelihood [
21,
22] given by
This process is repeated to find the vector
that maximizes the pseudolikelihood for
The optimized smoothing vector
is found by averaging
and
3.4. Computing Batted Ball Values
Each a posteriori probability
can be estimated using Bayes rule. The estimates for the densities
and
in Equation (
1) are generated using Equations (
2) and (
3) where the model data for
includes all
n vectors
and the model data for each
is defined by the subset of the
vectors with outcome
We use the optimized
smoothing vector derived using the method in
Section 3.3 for each case. The a priori probabilities
are estimated as
where
is the number of the
n vectors
with outcome
Using these estimates,
is computed using Equation (
1).
Many statistics such as batting average, on-base percentage, slugging average, and on-base plus slugging have been defined to quantify offensive value [
23]. Each of these statistics has certain deficiencies [
17]. Batting average and on-base percentage, for example, assume that all hits such as singles and doubles are equally valuable. Slugging average overweights the value of extra-base hits (doubles, triples, home runs) compared to singles. On-base plus slugging places too much value on slugging average relative to on-base percentage. Weighted on base average (wOBA) [
17] overcomes these deficiencies by weighting each possible outcome according to its run value. This property has made wOBA one of the most popular and useful offensive statistics [
24].
Using wOBA each of the possible batted ball outcomes
can be assigned a numerical value which allows the
probabilities to be used to compute a single expected value for
This is implemented using wOBA by multiplying each outcome by its average run value
Thus, we can represent the expected value of a batted ball as
where
out,
single,
double,
triple,
home run, and
batter reaches on error (ROE). The
weights for MLB are compiled for each year at [
25]. In this project, we process 2018 data for which the weights are
,
,
,
, and
If
b is the three-dimensional vector
of batted-ball parameters, then the wOBA
function in Equation (
5) can be represented by the wOBA cube. If
b is the four-dimensional vector
of batted ball and running speed parameters, then the wOBA
function in Equation (
5) can be represented by the four-dimensional wOBA tesseract. We will provide examples of the wOBA cube in this section and will analyze the wOBA tesseract in detail in
Section 4.
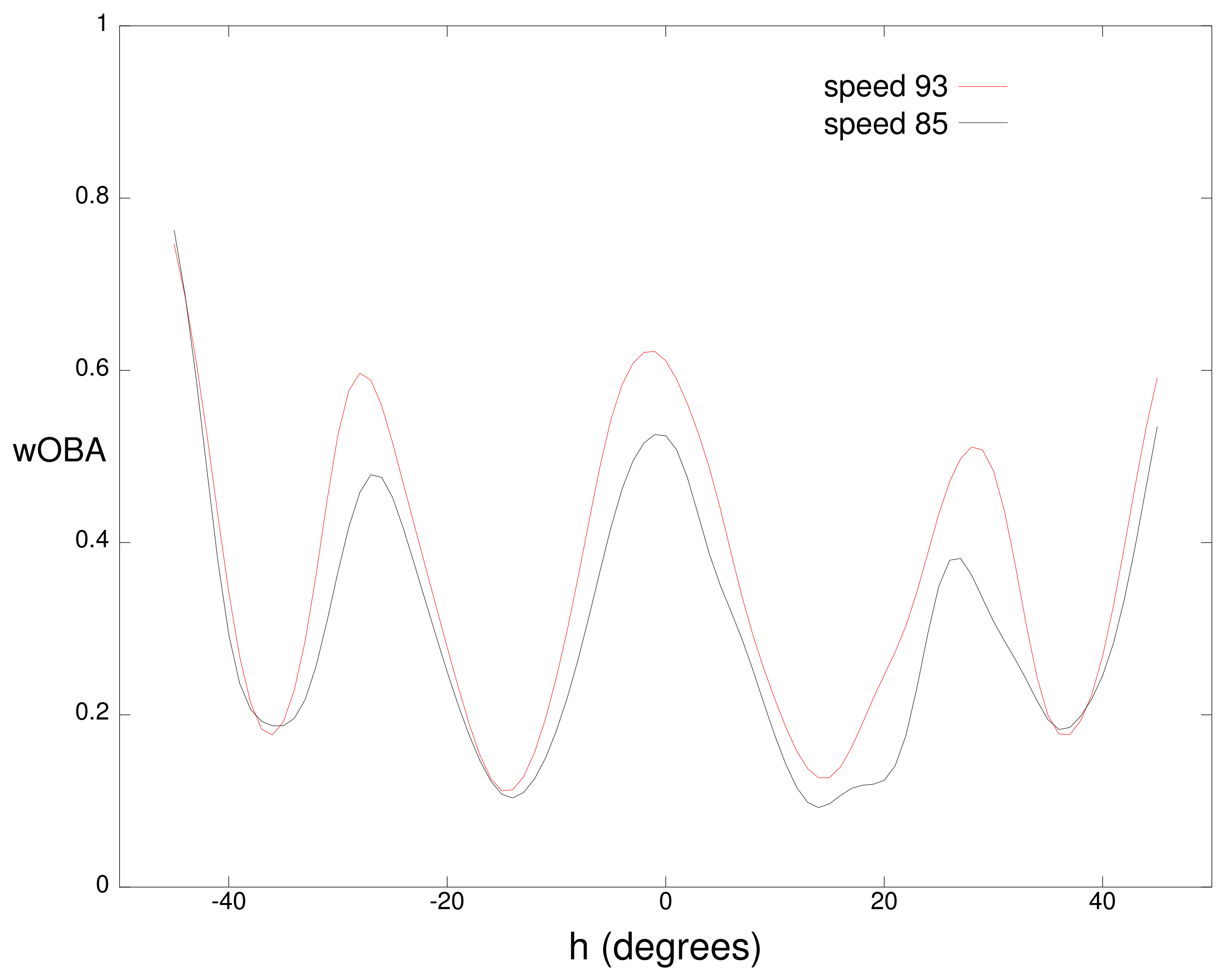
Figure 3 and
Figure 4 examine one-dimensional slices through the wOBA cube.
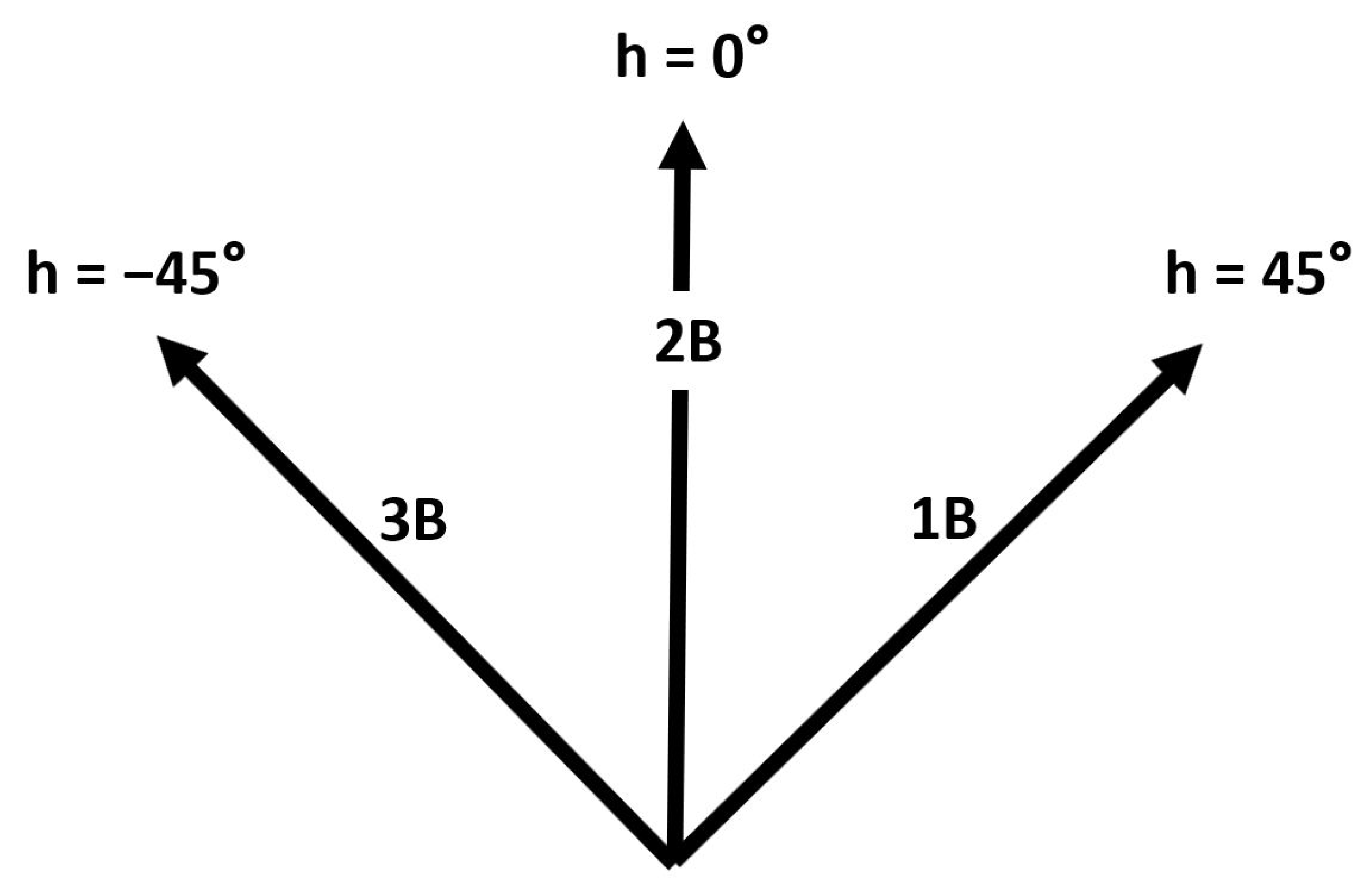
Figure 3 plots wOBA
for ground balls with a vertical angle of
that are hit at 85 and 93 miles per hour. Minima in the two curves correspond to the typical position of infielders with the minima from left to right corresponding to the third baseman, shortstop, second baseman, and first baseman respectively. Over most horizontal angles, balls hit at 93 mph have a higher value than balls hit at 85 mph since ground balls hit at a higher speed have a higher probability of eluding a defender.
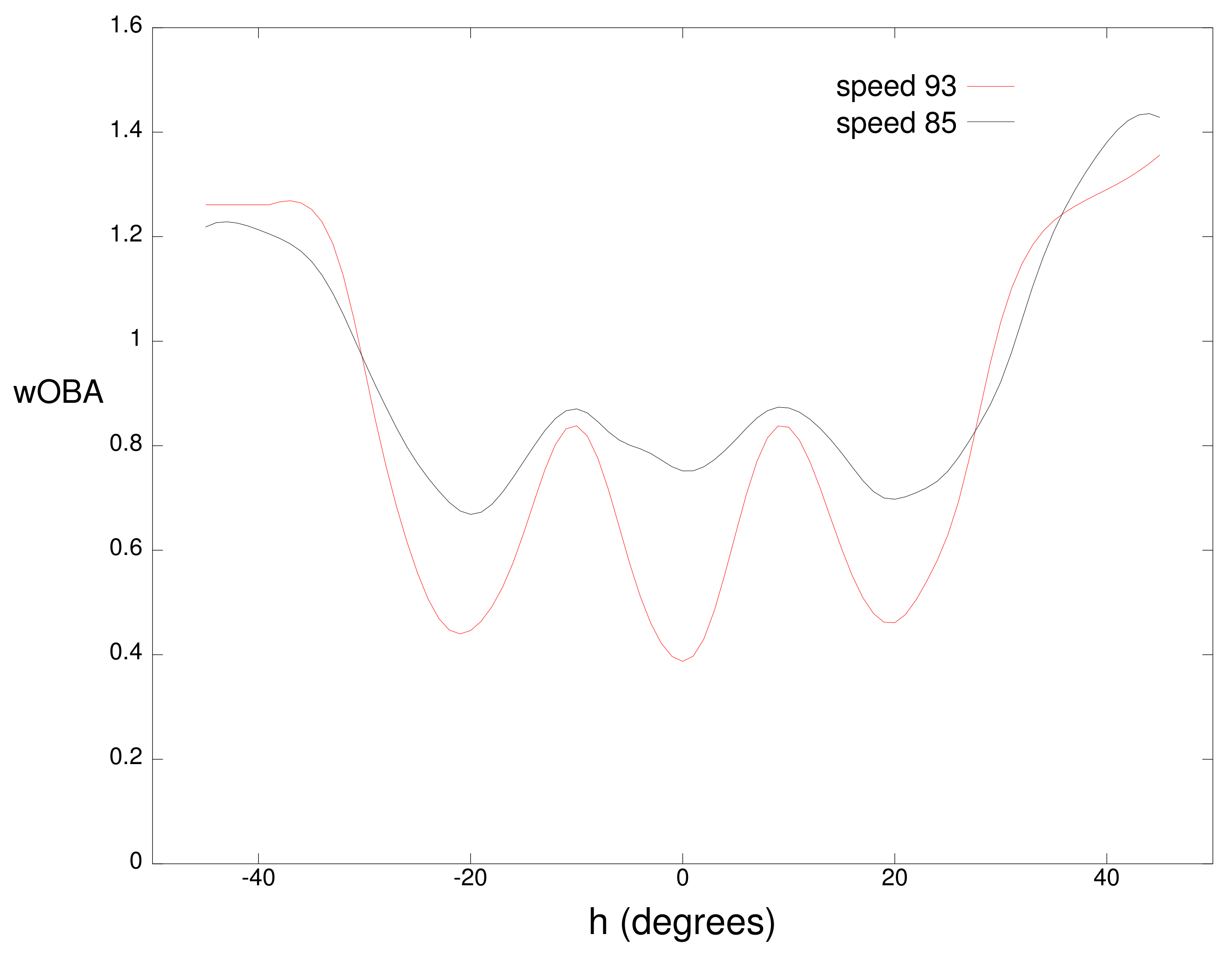
Figure 4 plots wOBA
for balls hit in the air with a vertical angle of
at the same two speeds. Minima in these curves correspond to the typical position of outfielders with the minima near
and
corresponding to the left fielder, center fielder, and right fielder respectively. For this vertical angle, balls hit in the direction of an outfielder have a higher value for a speed of 85 mph because these balls often fall in front of the outfielder for hits while balls hit at 93 mph more frequently carry to the outfielder for outs. For both the ground balls and fly balls, the largest wOBA values occur for balls hit near the foul lines (
) which often result in extra-base hits instead of singles.
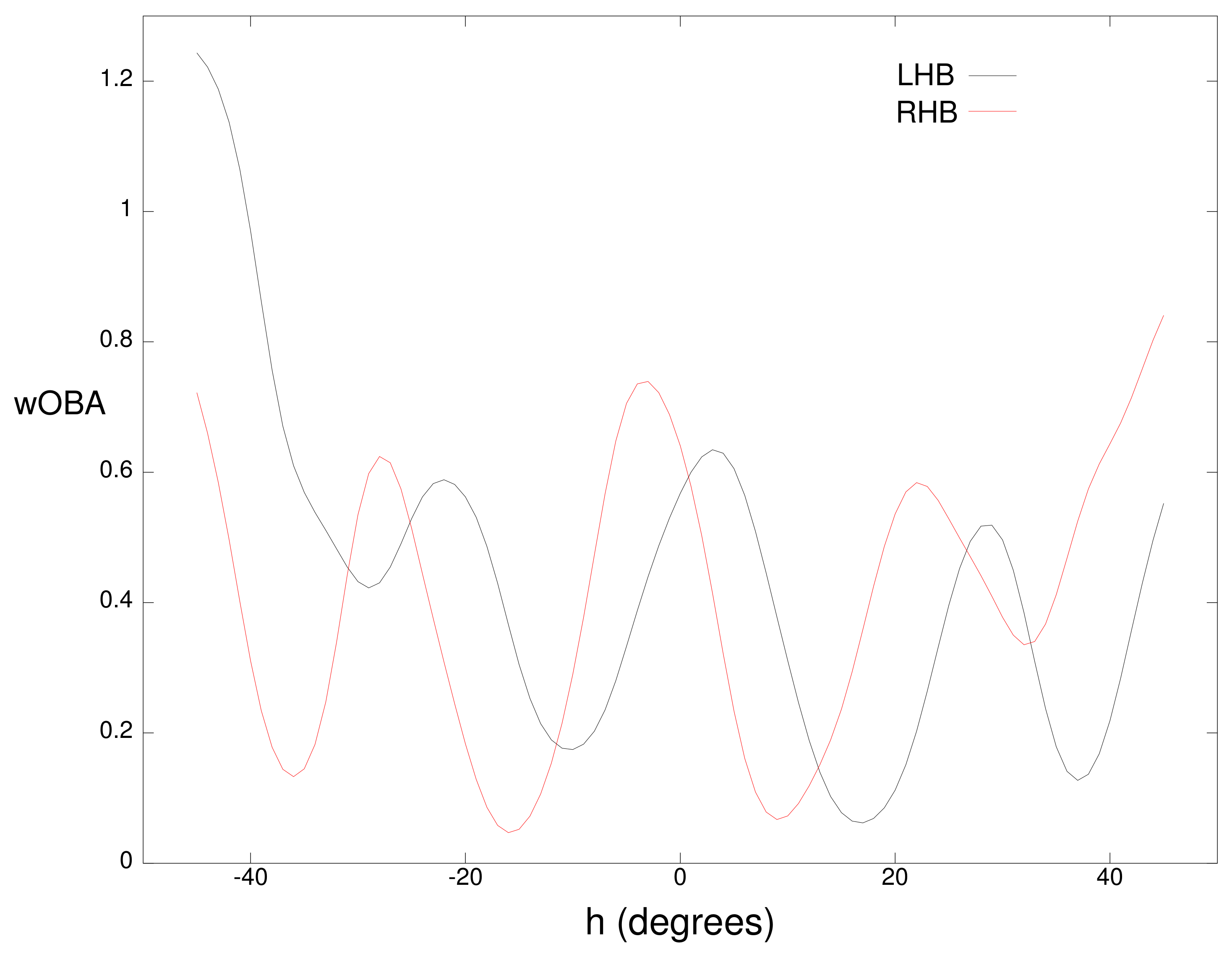
Fielder positioning is dependent on whether a batter is right-handed or left-handed. For this reason, we partition the measured
b vectors by batter handedness and learn two separate wOBA
functions: wOBA
for left-handed batters and wOBA
for right-handed batters. As an example,
Figure 5 plots wOBA
and wOBA
as a function of the horizontal angle
h for a batted ball with a vertical angle
v of
and a speed
s of 93 miles per hour. Each curve has four minima which correspond to the typical location of the four infielders. Each of these typical locations is shifted a few degrees to the left for right-handed batters due to fielder positioning. The value of wOBA
or wOBA
will be referred to as the intrinsic value of the batted ball.
3.5. Player Statistics
A player’s performance on batted balls is measured by statistics that are compiled over a period of time. Each batted ball can be assigned the weight
based on its outcome as described in
Section 3.4. This outcome-based value depends on variables such as the defense, the atmospheric conditions, the ballpark dimensions, and random noise which are independent of batter skill. Let
O denote the average of a player’s outcome-based values on batted balls over a period of time. The statistic
O is also known as wOBA on contact or wOBAcon. A player’s intrinsic values are based on parameters
that a player has direct control over. The average of these intrinsic values over time has been shown to have a significantly higher degree of repeatability than the average
O of the outcome-based values [
7]. We refer to the average of a batter’s intrinsic values computed using the three-dimensional vector
of batted-ball parameters as
and we refer to the average of a batter’s intrinsic values using the four-dimensional vector
that also includes his time to first estimate
r as










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}