Survivability-Enhanced Virtual Network Embedding Strategy in Virtualized Wireless Sensor Networks

 , ,
, ,  and
and
Abstract
1. Introduction
- (1)
- A survivable virtual network embedding model is established. Considering the resource consumption of nodes and links during the initial mapping and failover, the problem is transformed into the problem of minimizing link consumption to maximize the WSNInP’s long-term revenue.
- (2)
- A novel node reliability-aware virtual sensor network embedding method is proposed. The resource reliability of physical sensor nodes is evaluated according to node failure rate and congestion degree. Then the one with higher reliability is selected to embed a virtual node to improve the acceptance rate of VSNR and reduce the failure probability of physical nodes that perform VSN tasks.
- (3)
- A failure recovery strategy combining the protection mechanism and recovery mechanism is proposed to improve the VSN failure recovery rate. Resource backup is performed for the critical virtual sensor nodes. When a failure occurs, the affected VSN will be restored with the least spare resources to guarantee the survivability of the VSN and increase the long-term operating profit of the WSNInP.
2. Related Work
2.1. WSN Virtualization
2.2. Virtual Network Survivable Embedding
2.3. Survivable Embedding in a Virtulized Sensor Network
3. System Model and Problem Formulation
3.1. Network Model
3.2. Physical Network Failure
3.3. SVNE Problem Formulation
3.4. Performance Metrics
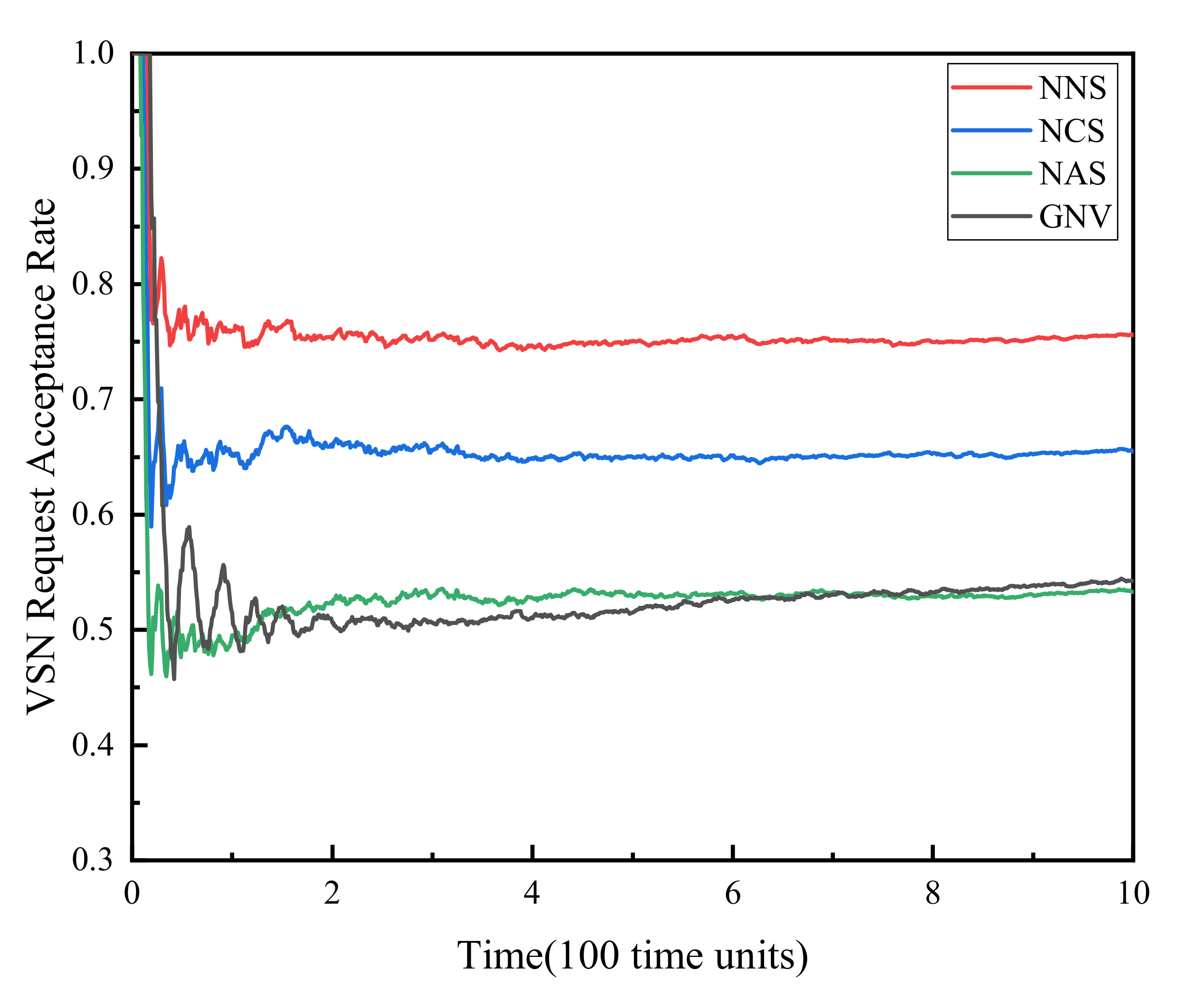
A. Virtual sensor network request acceptance rate
B. Recovery rate of virtual sensor network
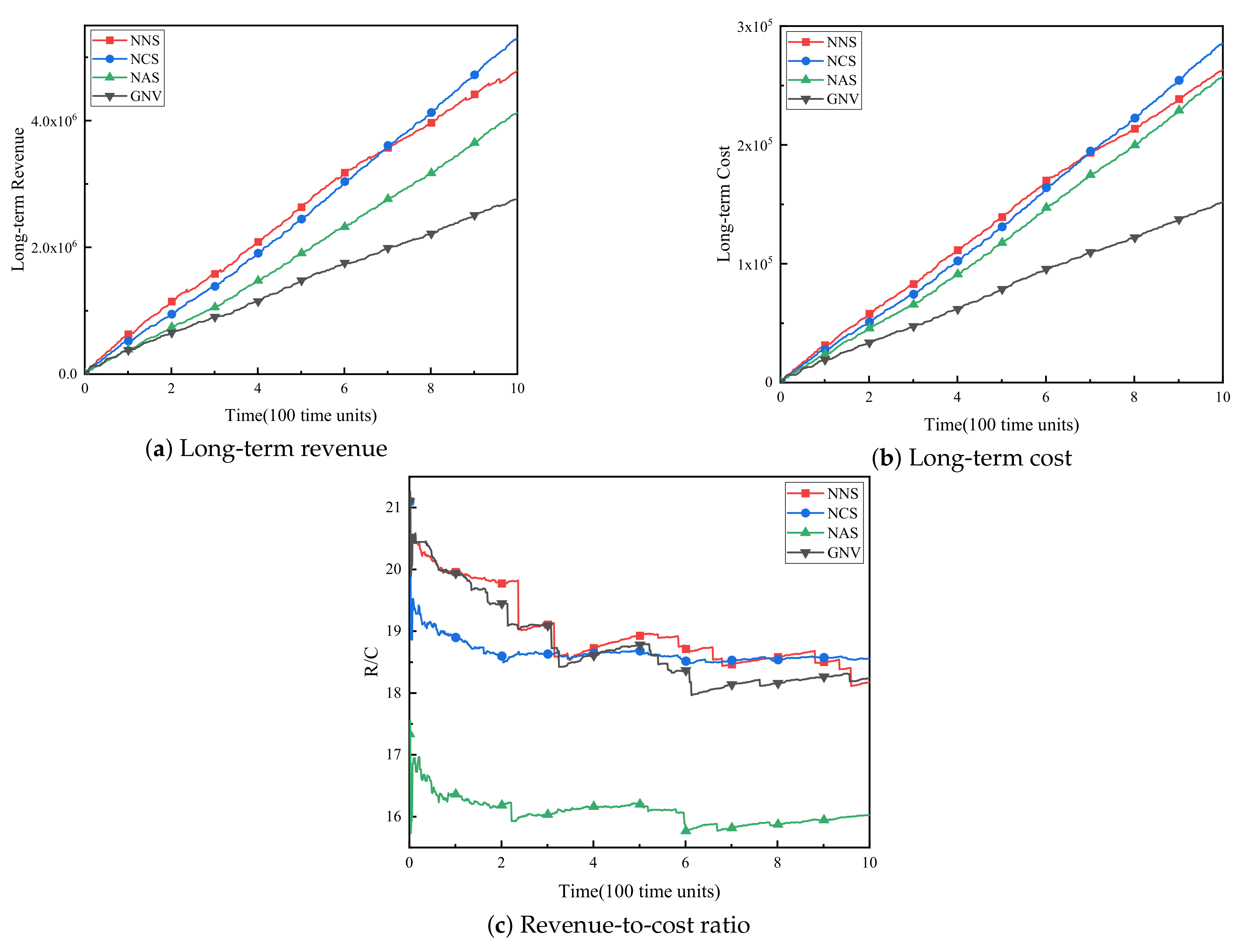
C. Long-term benefits of WSNInP
4. NCS Survivable Embedding Algorithm
4.1. Node Reliability-Aware Embedding
| Algorithm 1 Node reliability-aware backup survivable embedding algorithm (NCS). |
|
| Algorithm 2 NCS link embedding algorithm. |
|
4.2. VSN Failure Recovery Based on Resource Reservation
| Algorithm 3 Failure recovery algorithm. |
|
5. Analysis of Numerical Results
5.1. Parameter Setting
5.2. Analysis of Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khan, I.; Belqasmi, F.; Glitho, R.; Crespi, N.; Morrow, M.; Polakos, P. Wireless Sensor Network Virtualization: Early Architecture and Research Perspectives. Net. IEEE 2016, 29, 104–112. [Google Scholar] [CrossRef]
- He, P.; Tang, T. Community-Oriented Multimedia Content Maximization Mechanism in Social Internet of Things. IEEE Access 2020, 8, 22826–22833. [Google Scholar] [CrossRef]
- Khan, I.; Errounda, F.; Yangui, S.; Glitho, R.; Crespi, N. Getting Virtualized Wireless Sensor Networks IaaS Ready for PaaS. In Proceedings of the 2015 International Conference on Distributed Computing in Sensor Systems, Fortaleza, Brazil, 10–12 June 2015; pp. 224–229. [Google Scholar]
- Zhang, P.; Li, X.; Wu, D.; Wang, R. Edge-Cloud Collaborative Entity State Data Caching Strategy towards Networking Search Service in CPSs. IEEE Trans. Ind. Inform. 2020. [Google Scholar] [CrossRef]
- Zhang, P.; Kang, X.; Wu, D.; Wang, R. High-Accuracy Entity State Prediction Method Based on Deep Belief Network Toward IoT Search. IEEE Wirel. Commun. Lett. 2019, 8, 492–495. [Google Scholar] [CrossRef]
- Wu, D.; Han, X.; Yang, Z.; Wang, R. Exploiting Transfer Learning for Emotion Recognition under Cloud-Edge-Client Collaborations. IEEE J. Sel. Areas Commun. 2020. [Google Scholar] [CrossRef]
- Katona, R.; Cionca, V.; Orshea, D.; Pesch, D. Virtual Network Embedding for Wireless Sensor Networks Time Efficient QoS/QoI Aware Approach. IEEE Internet Things J. 2020. [Google Scholar] [CrossRef]
- Li, M.; Chen, C.; Hua, C.; Guan, X. Intelligent Latency-Aware Virtual Network Embedding for Industrial Wireless Networks. IEEE Internet Things J. 2019, 6, 7484–7496. [Google Scholar] [CrossRef]
- Khan, I.; Belqasmi, F.; Glitho, R.; Crespi, N.; Morrow, M.; Polakos, P. Wireless Sensor Network Virtualization: A Survey. IEEE Commun. Surv. Tutor. 2015, 18, 553–576. [Google Scholar] [CrossRef]
- Wu, D.; Yan, J.; Wang, H.; Wang, R. User-Centric Edge Sharing Mechanism in Software-Defined Ultra-Dense Networks. IEEE J. Sel. Areas Commun. 2020, 38, 1531–1541. [Google Scholar] [CrossRef]
- Fischer, A.; Botero, J.; Beck, M.; De Meer, H.; Hesselbach, X. Virtual Network Embedding: A Survey. IEEE Commun. Surv. Tutor. 2013, 15, 1888–1906. [Google Scholar] [CrossRef]
- Kaiwartya, O.; Abdullah, H.; Cao, Y.; Lloret, J.; Kumar, S.; Shah, R.R.; Prakash, S. Virtualization in Wireless Sensor Networks: Fault Tolerant Embedding for Internet of Things. IEEE Internet Things J. 2018, 5, 571–580. [Google Scholar] [CrossRef]
- Yeow, L.; Westphal, C.; Kozat, C. Designing and Embedding Reliable Virtual Infrastructures. Acm Sigcomm Comput. Commun. Rev. 2011, 41, 57–64. [Google Scholar] [CrossRef]
- Han, Y.; Hyun, J.; Hong, K. Graph abstraction based Virtual Network management framework for SDN. In Proceedings of the IEEE Conference on Computer Communications Workshops (2016 INFOCOM WKSHPS), San Francisco, CA, USA, 10–14 April 2016; pp. 884–885. [Google Scholar]
- Raee, V.M.; Naboulsi, D.; Glitho, R. Energy Efficient Task Assignment in Virtualized Wireless Sensor Networks. In Proceedings of the 2018 IEEE Symposium on Computers and Communications (ISCC), Natal, Brazil, 25–28 June 2018; pp. 976–979. [Google Scholar]
- Delgado, C.; Canales, M.; Ortin, J.; Gállego, J.R.; Redondi, A.; Bousnina, S.; Cesana, M. Joint Application Admission Control and Network Slicing in Virtual Sensor Networks. IEEE Internet Things J. 2017, 5, 28–43. [Google Scholar] [CrossRef]
- Acharyya, S.; Al-Anbuky, A.; Sivaramakrishnan, S. Software-Defined Sensor Networks: Towards Flexible Architecture Supported by Virtualization. In Proceedings of the 2019 Global IoT Summit (GIoTS), Aarhus, Denmark, 17–21 June 2019; pp. 1–4. [Google Scholar]
- Guo, B.; Chunming, Q.; Wang, J.; Yu, H.; Zuo, Y.; Li, J.; He, Y. Survivable Virtual Network Design and Embedding to Survive a Facility Node Failure. J. Lightwave Technol. 2014, 32, 483–493. [Google Scholar] [CrossRef]
- Jiang, H.; Gong, L.; Zuqing, W. Efficient joint approaches for location-constrained survivable virtual network embedding. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 1810–1815. [Google Scholar]
- Shahriar, N.; Chowdhury, R.; Ahmed, R.; Khan, A.; Fathi, S.; Boutaba, R.; Liu, L. Virtual Network Survivability through Joint Spare Capacity Allocation and Embedding. IEEE J. Sel. Areas Commun. 2018, 36, 502–518. [Google Scholar] [CrossRef]
- Soualah, O.; Fajjari, I.; Aitsaadi, N.; Mellouk, A. A reliable virtual network embedding algorithm based on game theory within cloud’s backbone. In Proceedings of the IEEE International Conference on Communications, Sydney, NSW, Australia, 10–14 June 2014; pp. 2975–2981. [Google Scholar]
- Qiang, Z.; Hui, W.; Guang, F.; Lv, H.W.; Wang, Z.D.; Wen, X.X.; Jiang, W. A Hybrid Reliable Heuristic Mapping Method Based on Survivable Virtual Networks for Network Virtualization. Discrete Dyn. Nat. Soc. 2015, 2015, 1–8. [Google Scholar]
- Li, D.; Cao, J.; Liu, M.; Zheng, Y. K-connected target coverage problem in wireless sensor networks. In Lecture Notes Combinatorial Optimization and Applications; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Cao, M.; Li, F.; Wang, W. K-Connected Target Coverage Problem Based on Cliffford Algebra in Wireless Sensor Networks. Adv. Mater. Res. 2011, 2019, 53–56. [Google Scholar] [CrossRef]
- Zeng, D.; Li, P.; Guo, S.; Miyazaki, T.; Hu, J.; Xiang, Y. Energy Minimization in Multi-Task Software-Defined Sensor Networks. IEEE Trans. Comput. 2015, 64, 3128–3139. [Google Scholar] [CrossRef]
- Guo, W.; Li, J.; Chen, G.; Niu, Y.; Chen, C. A PSO-Optimized Real-Time Fault-Tolerant Task Allocation Algorithm in Wireless Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2015, 26, 3236–3249. [Google Scholar] [CrossRef]
- Zhang, P.; Yao, H.; Liu, Y. virtual network embedding based on computing, network and storage resource constraints. IEEE Internet Things J. 2018, 5, 3298–3304. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| number of physical sensor nodes | 50 |
| simulation area | |
| physical node CPU resources | [40,80] |
| physical node storage resources | [40,80] |
| physical link bandwidth | [40,100] |
| number of VSNR virtual nodes | [3,5] |
| VSNR virtual node CPU | [10,20] |
| VSNR virtual stroage CPU | [10,20] |
| VSNR virtual link bandwidth | [10,25] |
| VSNR arrival rate | 2 |
| VSNR duration | 40 |
| failure happening rate | 0.02 |
| mean time to recovery | 10 |
| unit price of resource income | 40 |
| unit price of resource cost | 1.5 |
| node failure rate | 0.01 |
| critical node determination coefficient m | 1 |
| Algorithm | VSN Embedding Method | Node Backup Method | Failure Recovery Method |
|---|---|---|---|
| NNS | Node reliability- | No backup | Find a feasible migration node |
| aware node embedding | |||
| NCS | Node reliability- | Switch the fault critical virtual node | |
| aware node embedding | Critical node backup | to backup node or search for a | |
| feasible node for common virtual node | |||
| NAS | Node reliability- | Full backup | Switch the fault virtual |
| node selecting with | node to the backup node | ||
| GNV | the strongest CPU capability; | No backup | Find a feasible migration node |
| selects the shortest path |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, D.; Liu, Z.; Yang, Z.; Zhang, P.; Wang, R.; Ma, X. Survivability-Enhanced Virtual Network Embedding Strategy in Virtualized Wireless Sensor Networks. Sensors 2021, 21, 218. https://doi.org/10.3390/s21010218
Wu D, Liu Z, Yang Z, Zhang P, Wang R, Ma X. Survivability-Enhanced Virtual Network Embedding Strategy in Virtualized Wireless Sensor Networks. Sensors. 2021; 21(1):218. https://doi.org/10.3390/s21010218
Chicago/Turabian StyleWu, Dapeng, Zhenli Liu, Zhigang Yang, Puning Zhang, Ruyan Wang, and Xinqiang Ma. 2021. "Survivability-Enhanced Virtual Network Embedding Strategy in Virtualized Wireless Sensor Networks" Sensors 21, no. 1: 218. https://doi.org/10.3390/s21010218
APA StyleWu, D., Liu, Z., Yang, Z., Zhang, P., Wang, R., & Ma, X. (2021). Survivability-Enhanced Virtual Network Embedding Strategy in Virtualized Wireless Sensor Networks. Sensors, 21(1), 218. https://doi.org/10.3390/s21010218