Software Sensor for Airflow Modulation and Noise Detection by Cyclostationary Tools

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Cyclo-stationary: Definitions, Properties and Extensions
3. Signal Modelling
3.1. Signal Modelling According to Cyclostationarity
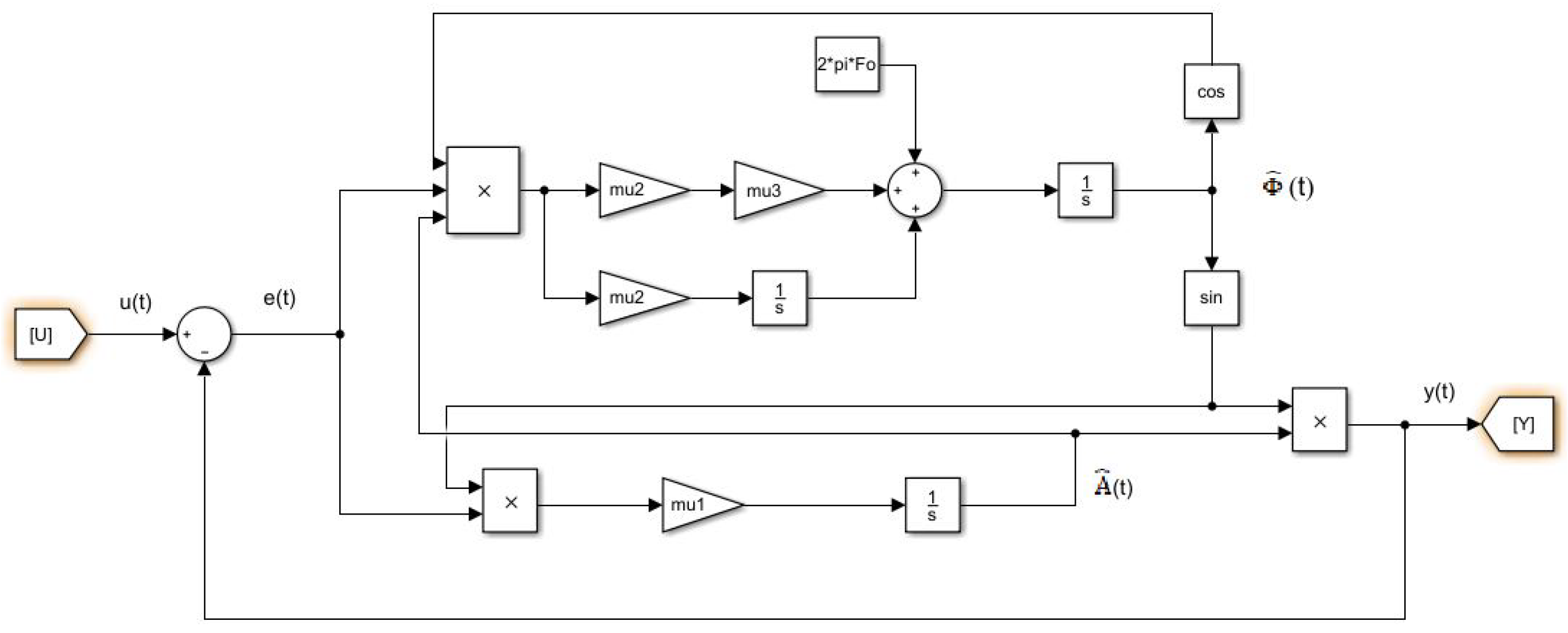
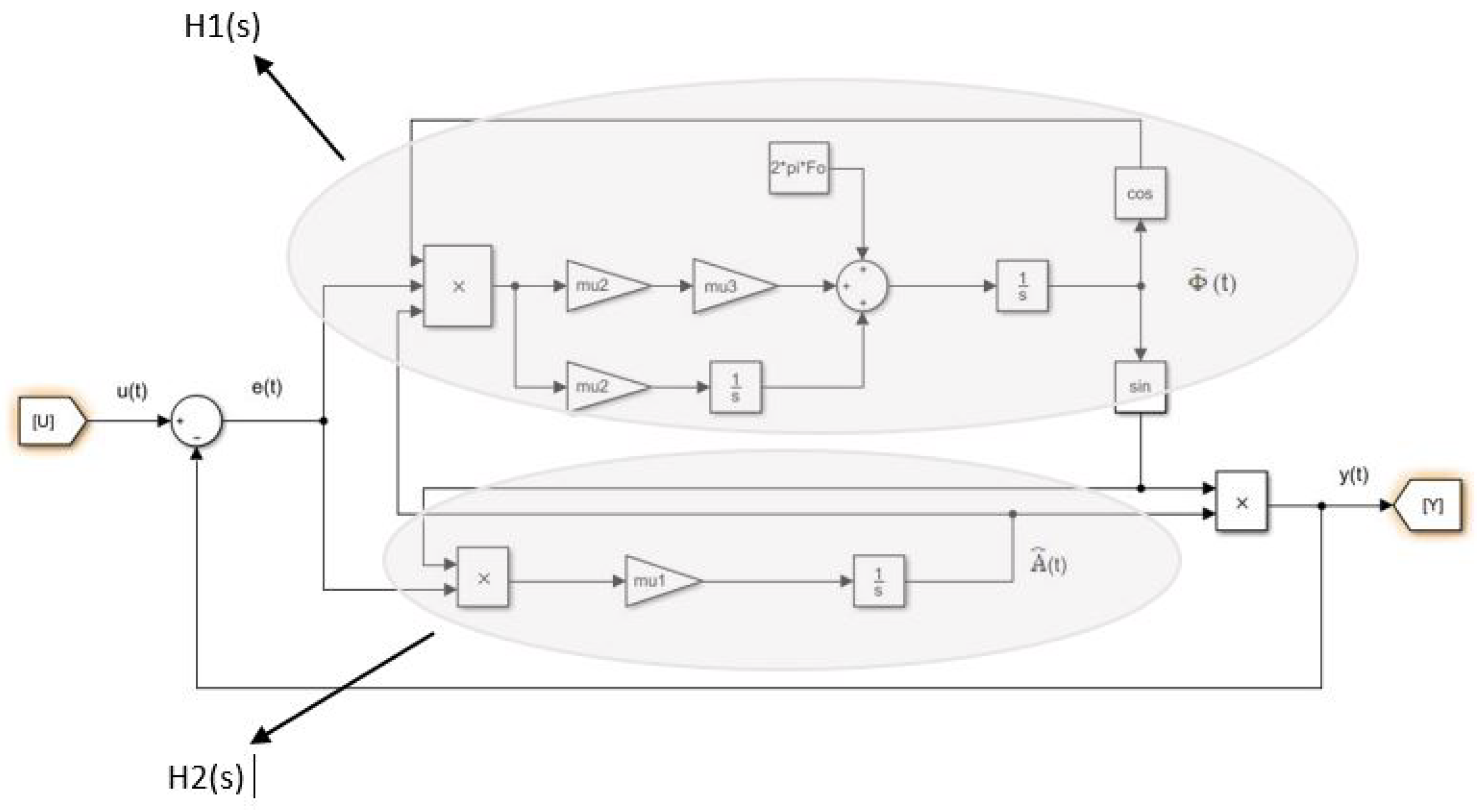
3.2. Real Time to Extract Information
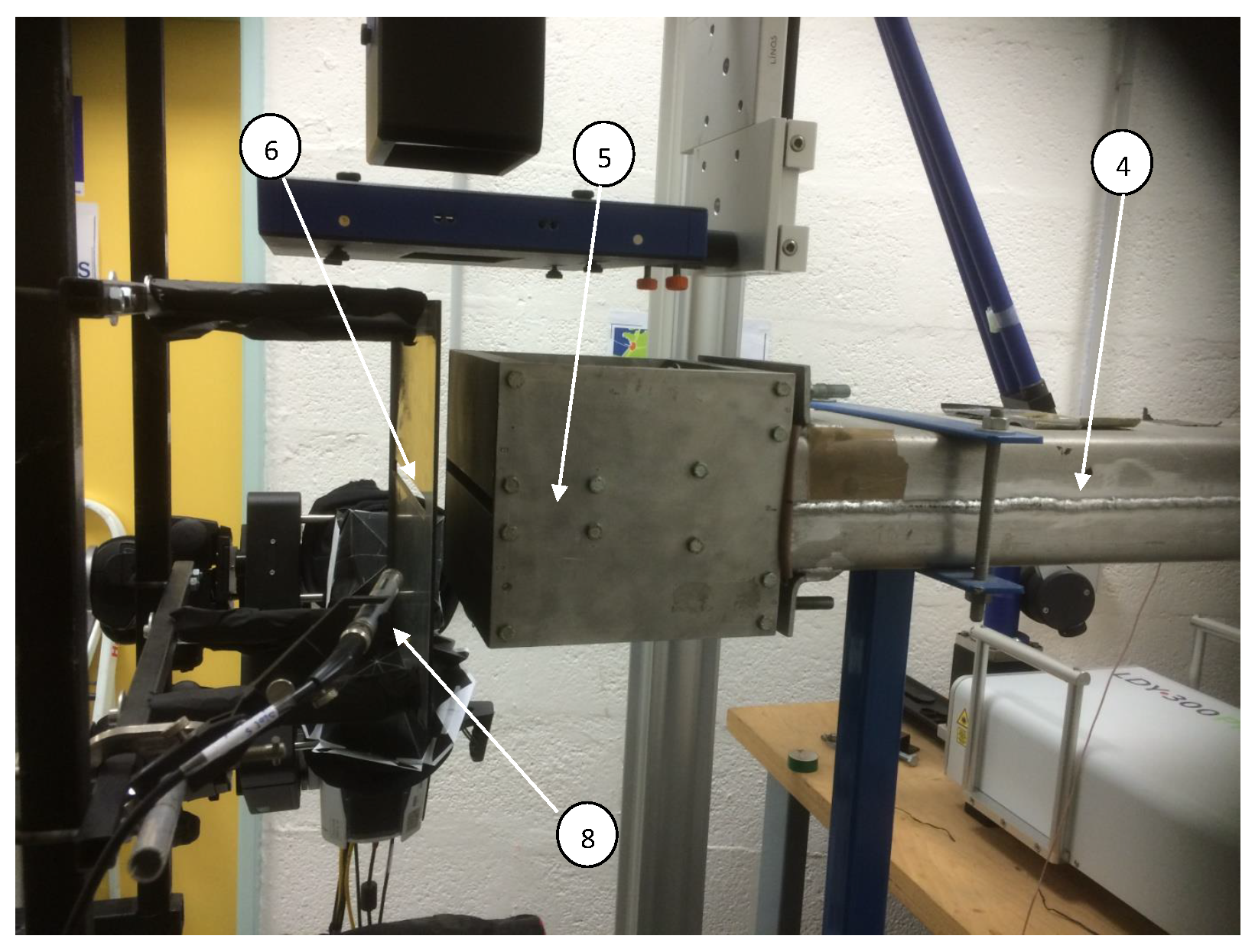
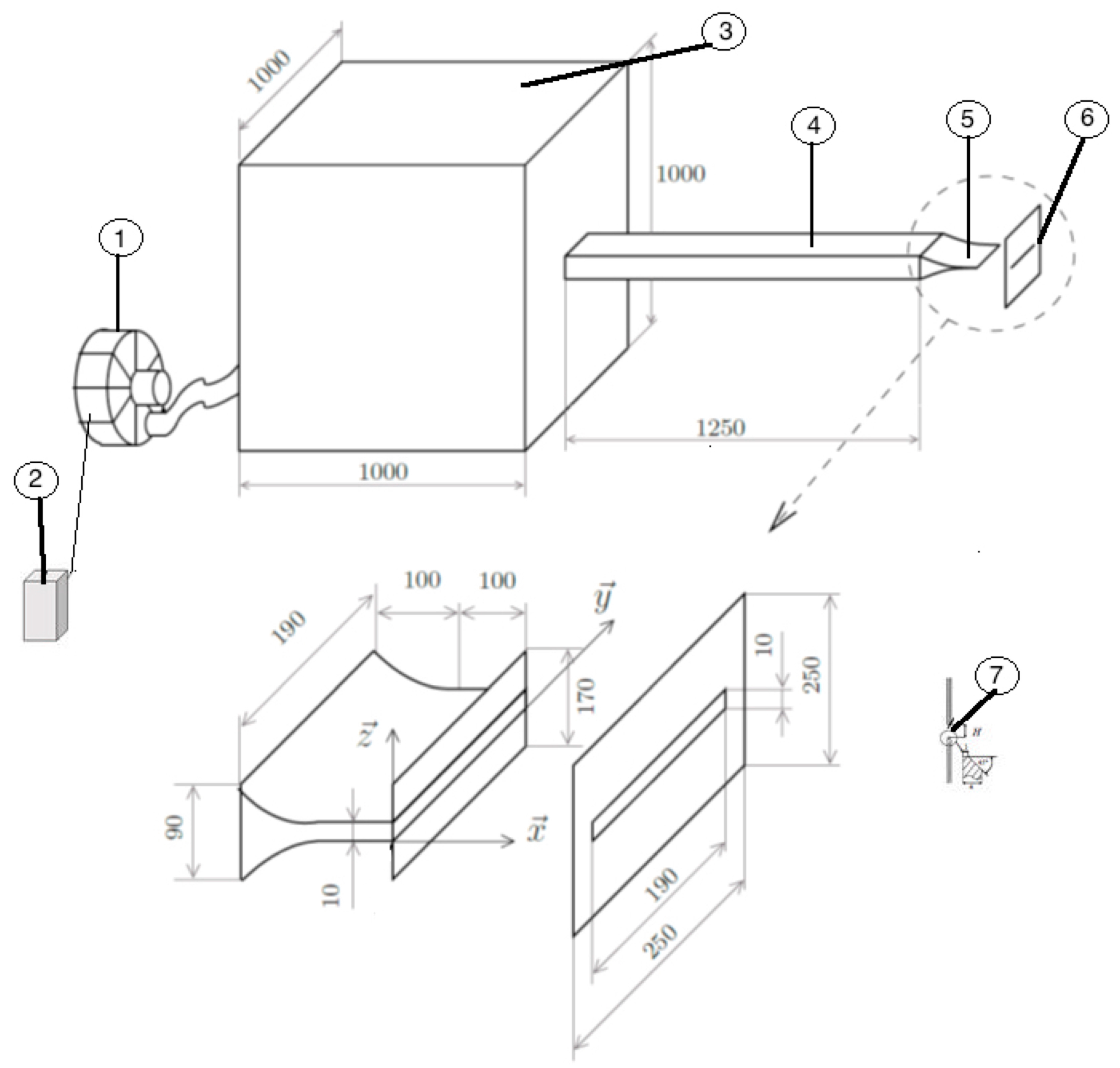
4. Experimental Setup
4.1. Flow Configuration
4.2. Acoustic Measurements
5. Experimental Results
6. Conclusions and Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Bennett, W.R. Statistics of Regenerative Digital Transmission. Bell Labs Tech. J. 1958, 37, 1501–1542. [Google Scholar] [CrossRef]
- Gardner, W.A. The spectral correlation theory of cyclostationary time-series. Signal Process. 1986, 11, 13–36. [Google Scholar] [CrossRef]
- Gardner, W. Spectral correlation of modulated signals: Part I-analog modulation. IEEE Trans. Commun. 1987, 35, 584–594. [Google Scholar] [CrossRef]
- Casoli, P.; Bedotti, A.; Campinini, F.; Pastori, M. A Methodology Based on Cyclostationary Analysis for Fault Detection of Hydraulic Axial Piston Pumps. Energies 2018, 11, 1874. [Google Scholar] [CrossRef]
- Souza, P.; Souza, V.; Silveira, L. Analysis of Spectral Sensing Using Angle-Time Cyclostationarity. Sensors 2019, 19, 4222. [Google Scholar] [CrossRef] [PubMed]
- Tardu, S. Caractérisation des écoulements turbulents instationnaires périodiques. C.R. Mec. 2003, 331, 767–774. [Google Scholar] [CrossRef]
- Larsson, M.; Johansson, S.; Håkansson, L.; Claesson, I. Microphone windscreens for turbulent noise suppression when applying active noise control to ducts. In Proceedings of the Twelfth International Congress on Sound and Vibration (ICSV12), Lisbon, Portugal, 11–14 July 2005. [Google Scholar]
- Shepherd, I.C.; La Fontaine, R. Microphone screens for acoustic measurement in turbulent flows. J. Sound Vib. 1986, 111, 153–165. [Google Scholar] [CrossRef]
- Hamdi, J. Reconstruction Volumique D’un jet Impactant une Surface Fendue à Partir de Champs Cinématiques Obtenus par PIV Stéréoscopique. Ph.D. Thesis, Université de La Rochelle, La Rochelle, France, 2017. [Google Scholar]
- Maiz, S. Estimation et Détection de Signaux Cyclostationnaires par les Méthodes de Ré-échantillonnage Statistique: Applications à L’analyse des Signaux Biomécaniques. Ph.D. Thesis, University of Saint-Etienne, Saint Etienne, France, 2014. [Google Scholar]
- Antoni, J. Cyclostationarity by examples. Mech. Syst. Sig. Process. 2009, 23, 987–1036. [Google Scholar] [CrossRef]
- Bonnardot, F. Comparaison Entre les Analyses Angulaire et Temporelle des Signaux Vibratoires de Machines Tournantes. Etude du Concept de Cyclostationnarité Floue. Ph.D. Thesis, Institut National Polytechnique de Grenoble-INPG, University of Grenoble, Grenoble, France, 2004. [Google Scholar]
- Bonnardot, F.; Antoni, J.; Randall, R.B.; El Badaoui, M. Enhancement of second-order cyclostationarity signal: Application to vibration analysis. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004; pp. 781–784. [Google Scholar] [CrossRef]
- Antoni, J.; Ducleaux, N.; NGhiem, G.; Wang, S. Separation of combustion noise in IC engines under cyclo-non-stationary regime. Mech. Syst. Sig. Process. 2013, 38, 223–236. [Google Scholar] [CrossRef]
- Izzo, L.; Napolitano, A. Time-Frequency Representations of Generalized Almost-Cyclostationary Signals. Available online: http://documents.irevues.inist.fr/handle/2042/12699 (accessed on 4 April 2020).
- Antoni, J. Cyclic spectral analysis in practice. Mech. Syst. Sig. Process. 2007, 21, 597–630. [Google Scholar] [CrossRef]
- Ziarania, A.; Konrad, A. A methodof extraction of nonstationary sinusoids. Elsevier Sig. Process. 2004, 84, 1323–1346. [Google Scholar] [CrossRef]
- Siraki, A.G.; Gajjar, C.; Khan, M.A.; Paul, B.; Pillay, P. An Algorithm for Nonintrusive In Situ Efficiency Estimation of Induction Machines Operating with Unbalanced Supply Conditions. IEEE Trans. Ind. Appl. 2012, 48, 1890–1900. [Google Scholar] [CrossRef]
- Hamdi, J.; Assoum, H.; Abed-Meraim, K.; Sakout, A. Volume reconstruction of an impinging jet obtained from stereoscopic-PIV data using POD. Eur. J. Mech. B. Fluids 2018, 67, 433–445. [Google Scholar] [CrossRef]











© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alkoussa Dit Albacha, M.; Rambault, L.; Sakout, A.; Abed Meraim, K.; Etien, E.; Doget, T.; Cauet, S. Software Sensor for Airflow Modulation and Noise Detection by Cyclostationary Tools. Sensors 2020, 20, 2414. https://doi.org/10.3390/s20082414
Alkoussa Dit Albacha M, Rambault L, Sakout A, Abed Meraim K, Etien E, Doget T, Cauet S. Software Sensor for Airflow Modulation and Noise Detection by Cyclostationary Tools. Sensors. 2020; 20(8):2414. https://doi.org/10.3390/s20082414
Chicago/Turabian StyleAlkoussa Dit Albacha, Mohamad, Laurent Rambault, Anas Sakout, Kamel Abed Meraim, Erik Etien, Thierry Doget, and Sebastien Cauet. 2020. "Software Sensor for Airflow Modulation and Noise Detection by Cyclostationary Tools" Sensors 20, no. 8: 2414. https://doi.org/10.3390/s20082414
APA StyleAlkoussa Dit Albacha, M., Rambault, L., Sakout, A., Abed Meraim, K., Etien, E., Doget, T., & Cauet, S. (2020). Software Sensor for Airflow Modulation and Noise Detection by Cyclostationary Tools. Sensors, 20(8), 2414. https://doi.org/10.3390/s20082414