Terrain Point Cloud Assisted GB-InSAR Slope and Pavement Deformation Differentiate Method in an Open-Pit Mine

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Linear GB-InSAR and TLS Data Fusion
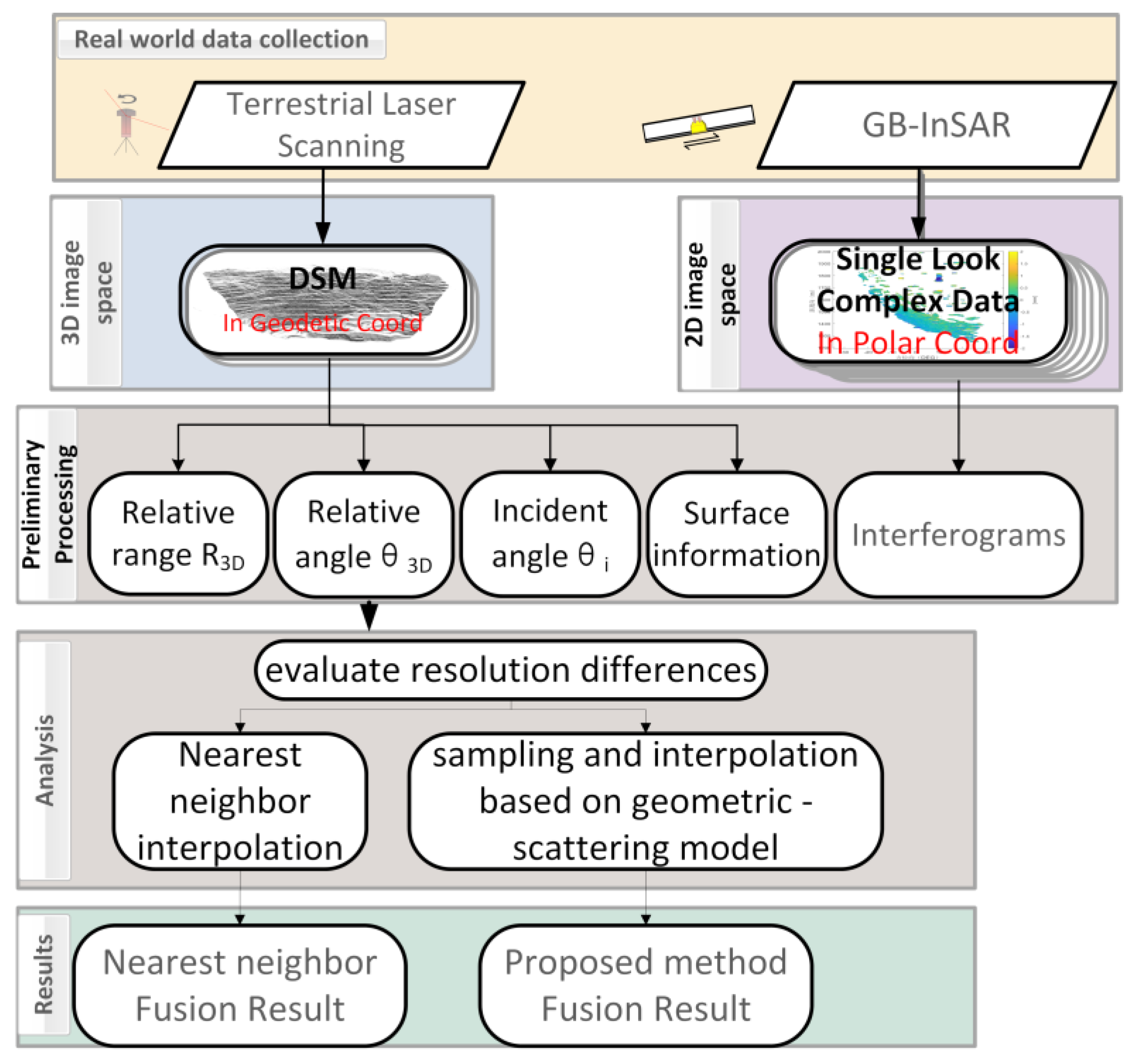
2.1. Problem and Solving Scheme
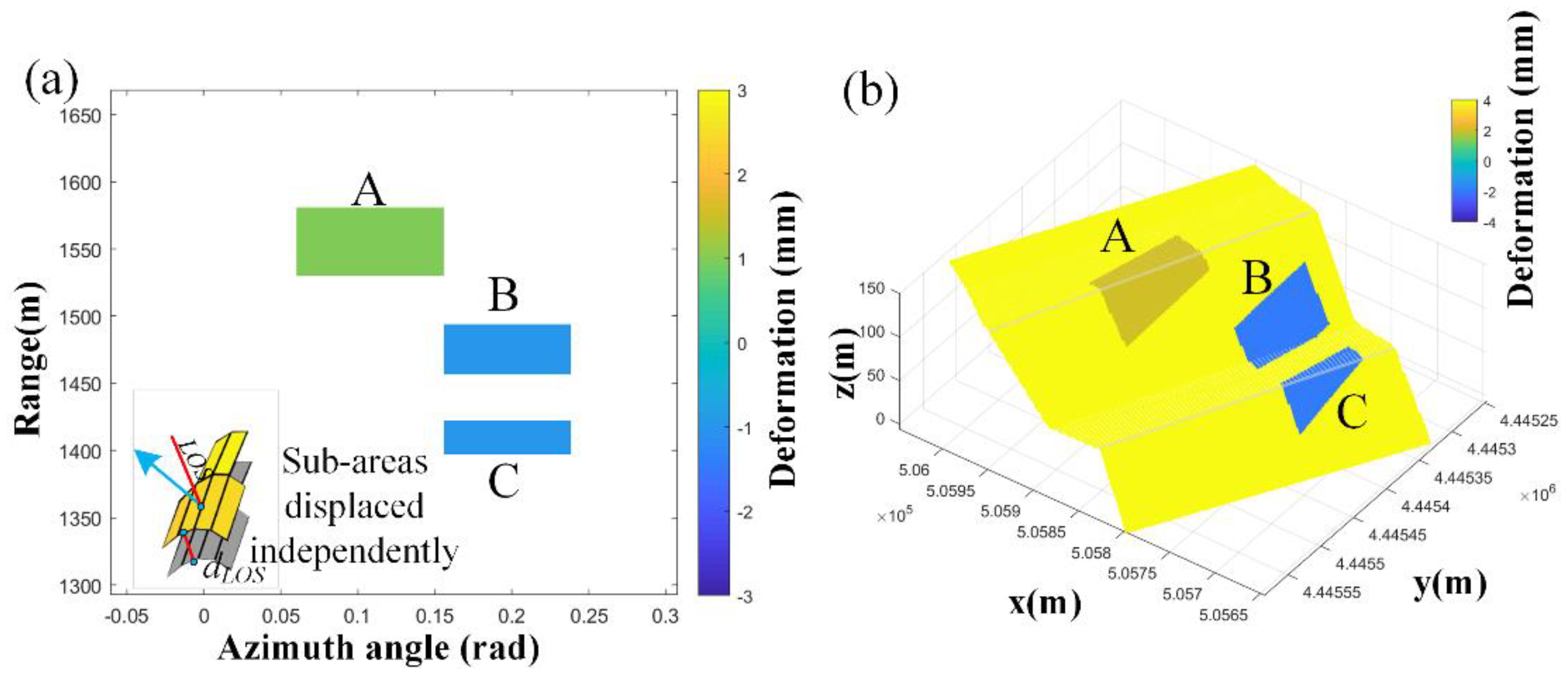
- Calculate relative ranges and azimuth angle according to GB-InSAR monitoring geometry.
- Nearest-neighbor interpolation for one radar pixel-to-multiple terrain surface points mapping.
- 3D visualization.
2.2. GB-InSAR and Point Cloud
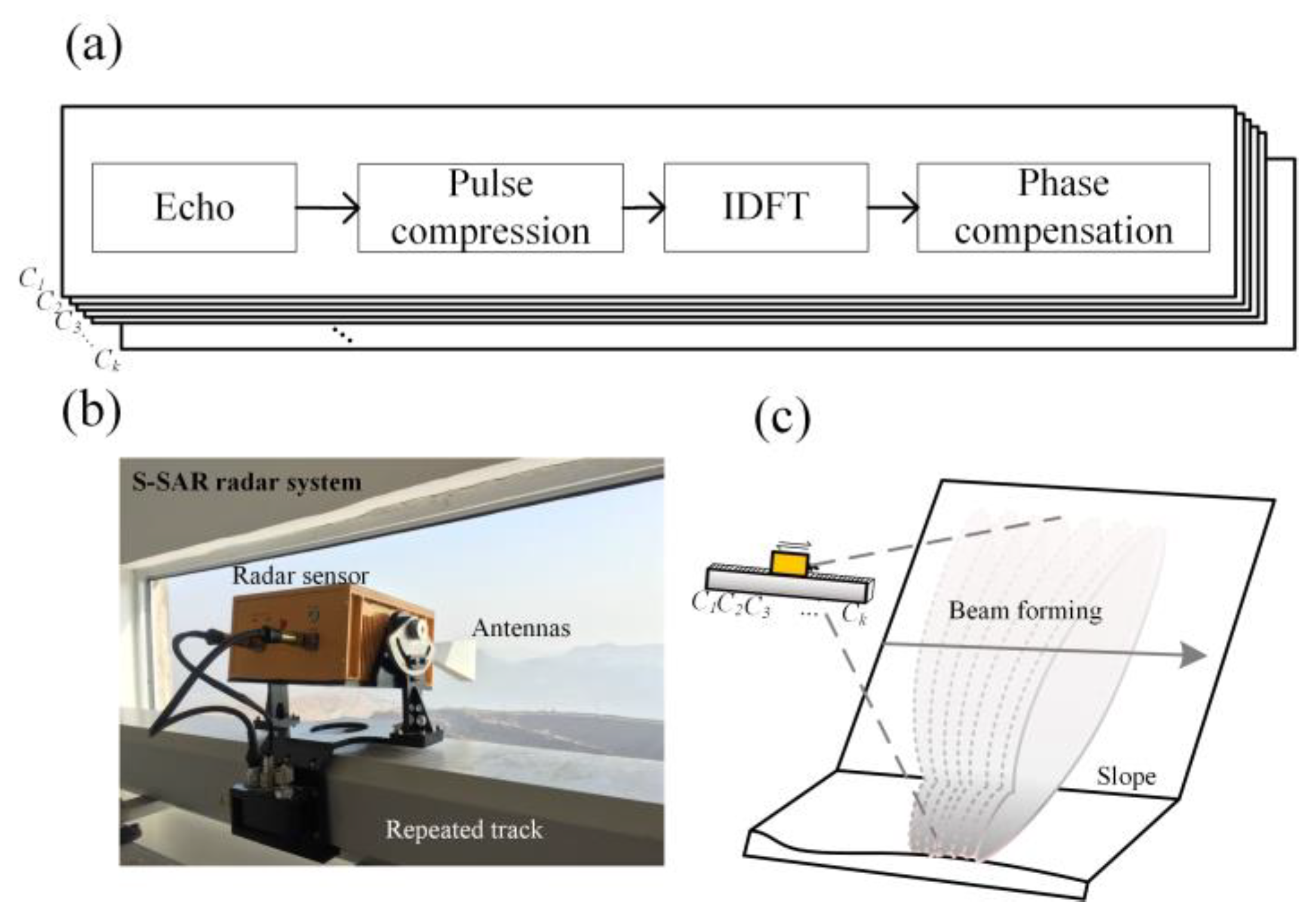
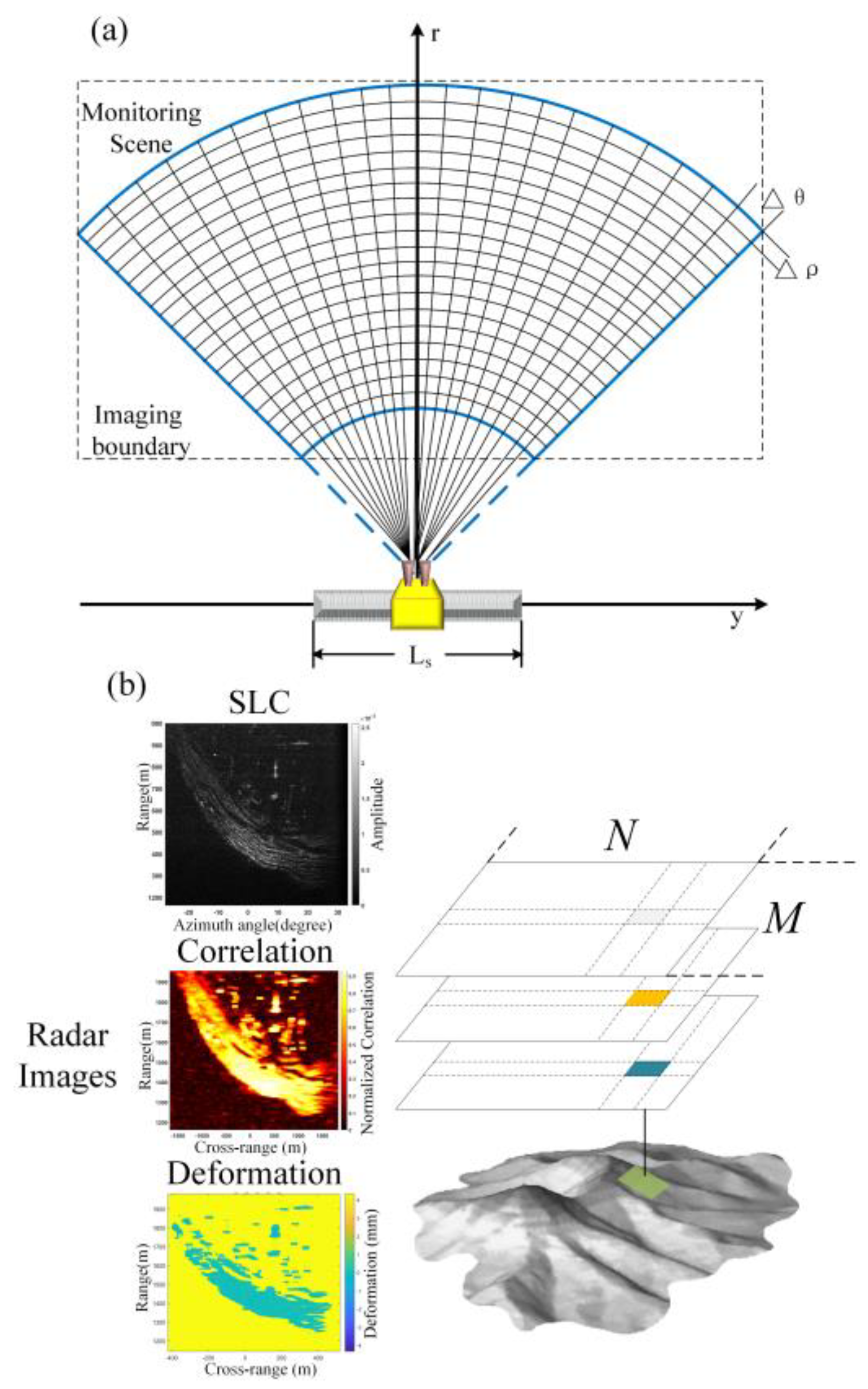
2.2.1. GB-InSAR Images
2.2.2. Point Cloud
3. Methods
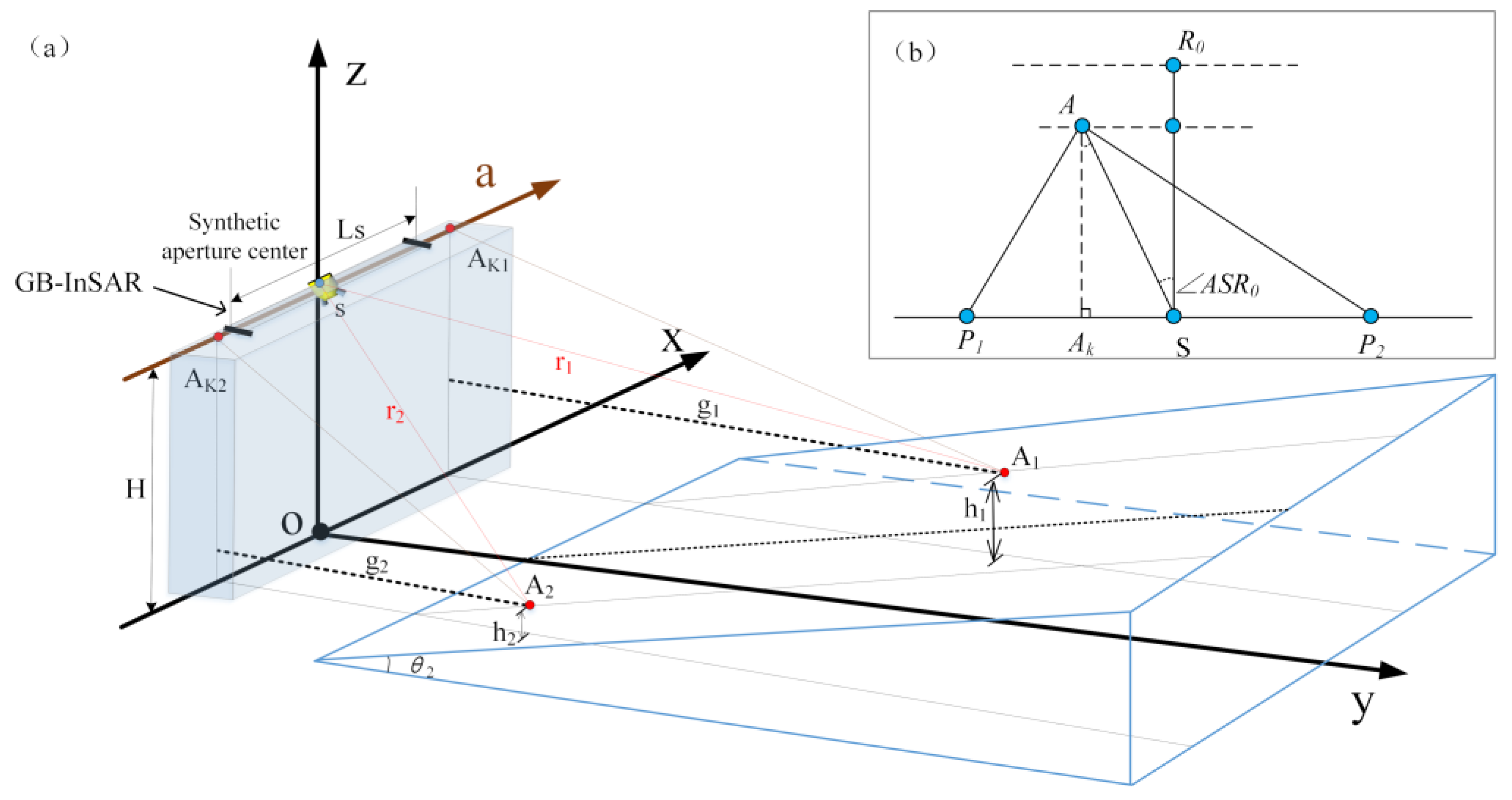
3.1. Geometric Mapping Between Image Space and Terrain Space
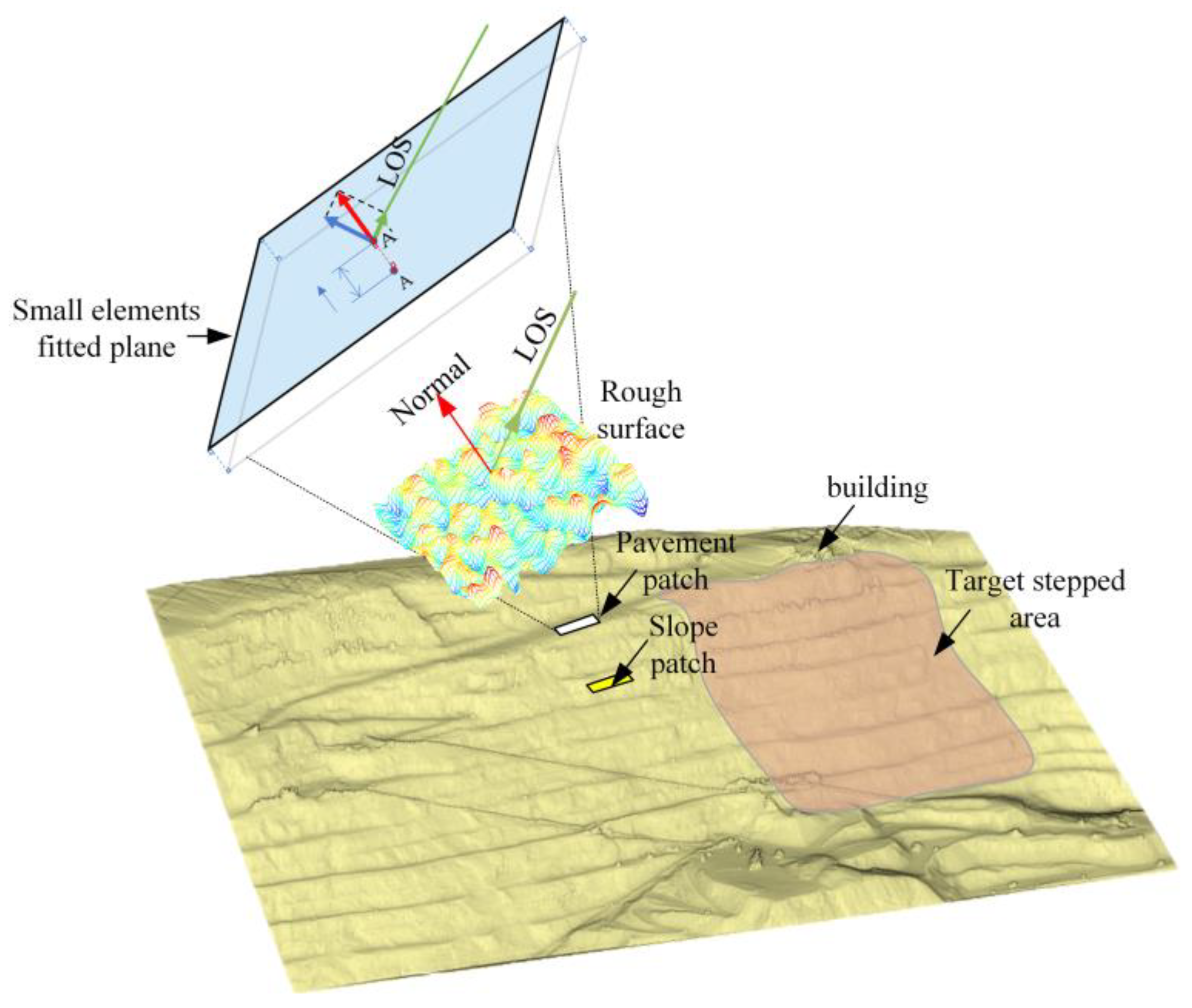
3.2. Geometric and Scattering Weight Model
4. Results
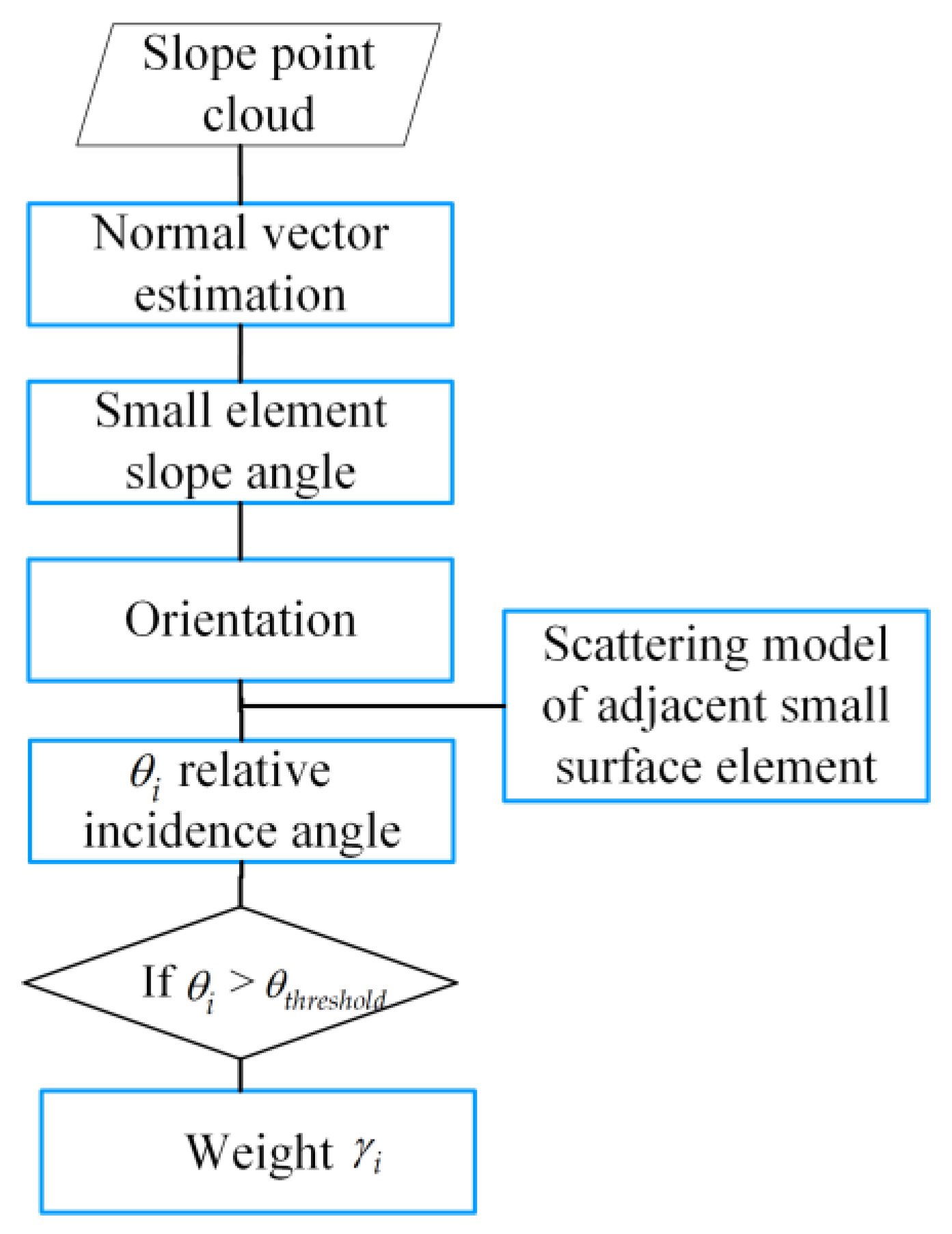
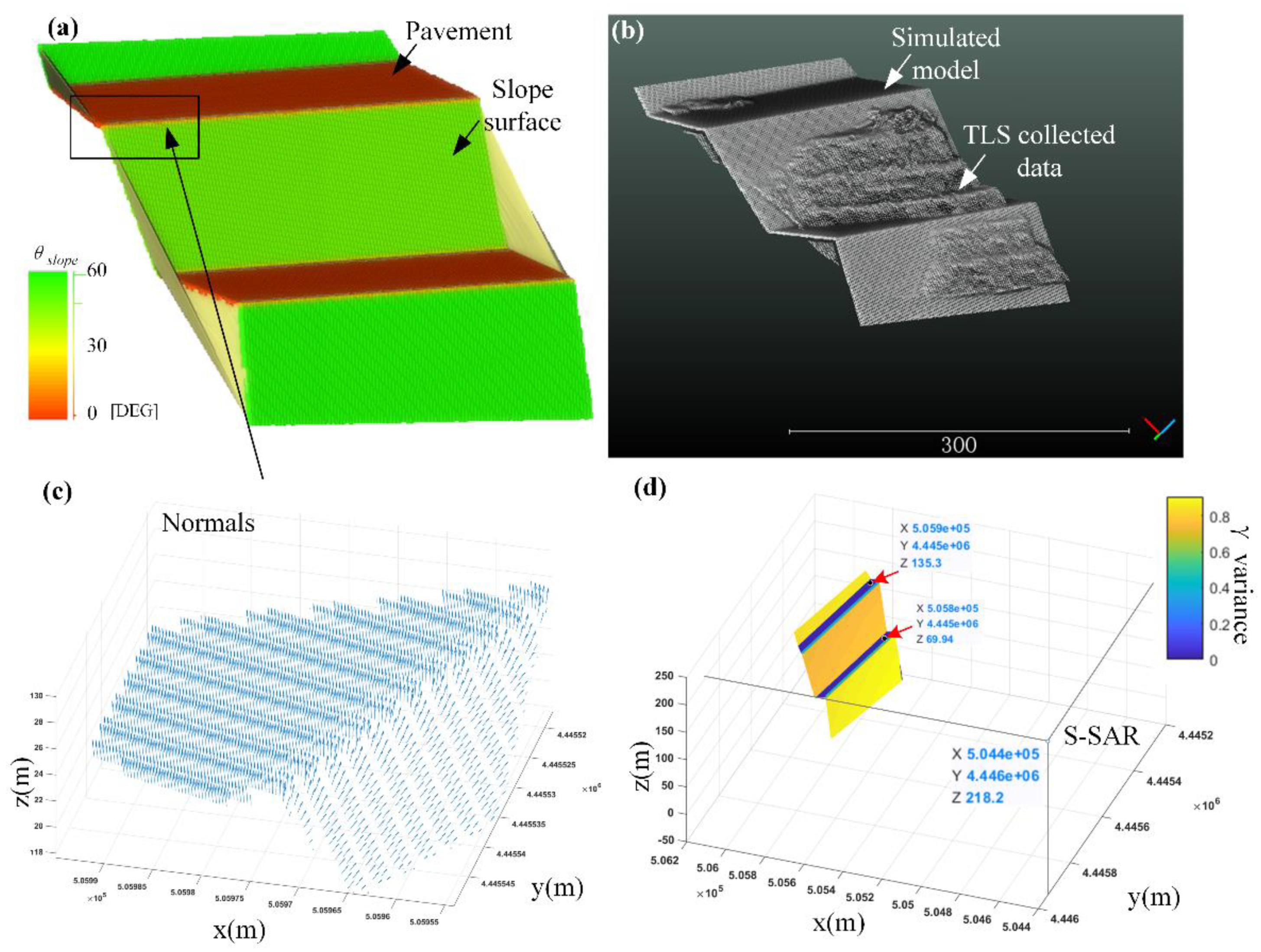
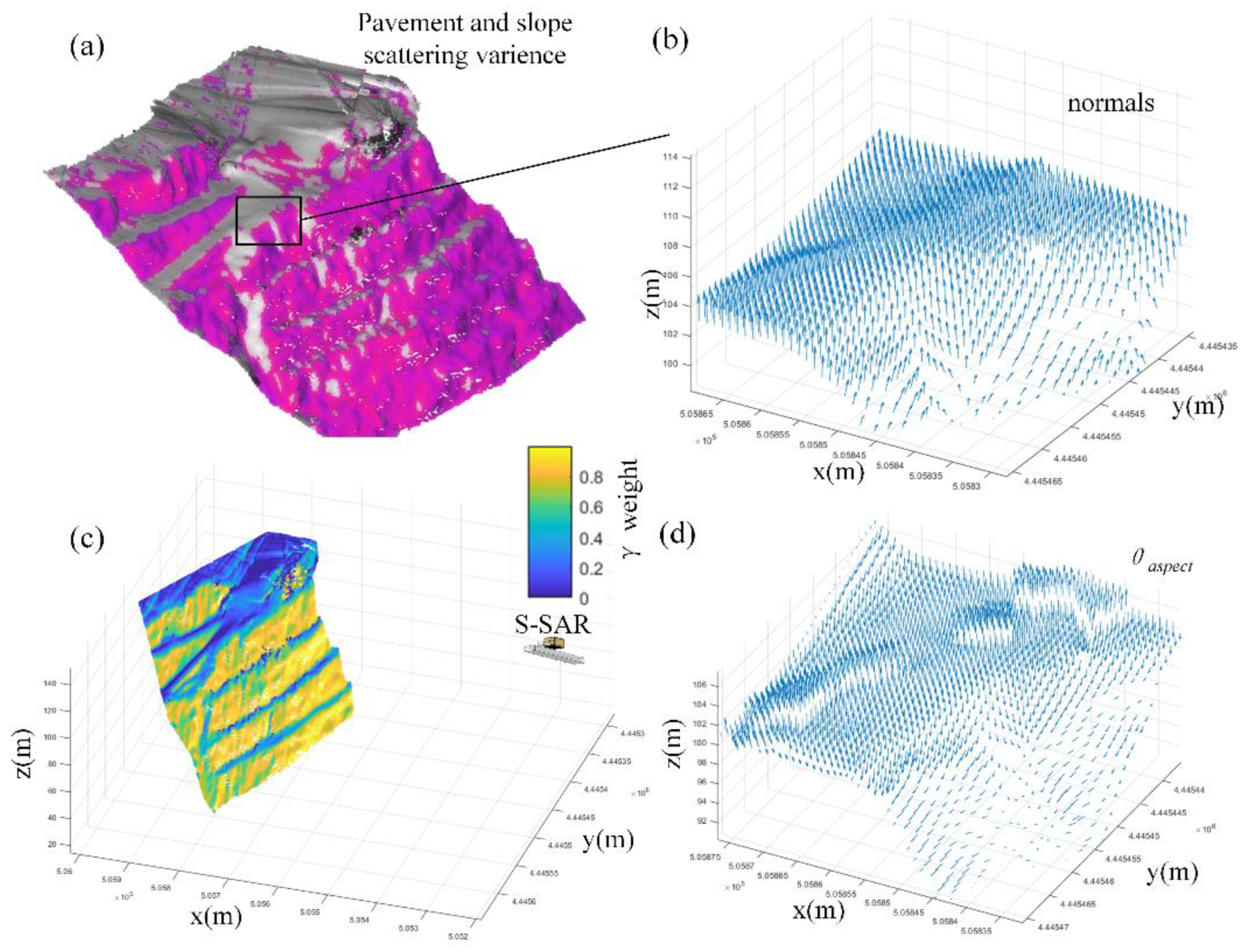
- Normal : Normal vector computing is integrated into many point cloud processing software and C++ library, for example: Cloud compare, MeshLab, and point cloud library (PCL). We programmed with the PCL library and referenced the Cloud compare built-in minimum spanning tree method to extract normal vectors of the sampled step model. is as shown in Figure 8c. The pavement and the slope can be differentiated by .
- Orientation: The orientation of each point in the model is easy to extract. As the step model coded, it has a certain horizontal coordinate system plane. The angle between and horizontal plane normal can be treated as an orientation vector , and the of each point in Equation (6) is identified.
- Line-of-sight (LOS): LOS is the vector that connects each point to radar Station S.
- Relative incident angle : can be determined by Equation (11).
- Weight : is the normalization of . The result is shown in Figure 8d.
5. Discussion
- How the weight influences the deformation mapping result.
- How can we get closer to the real deformation.
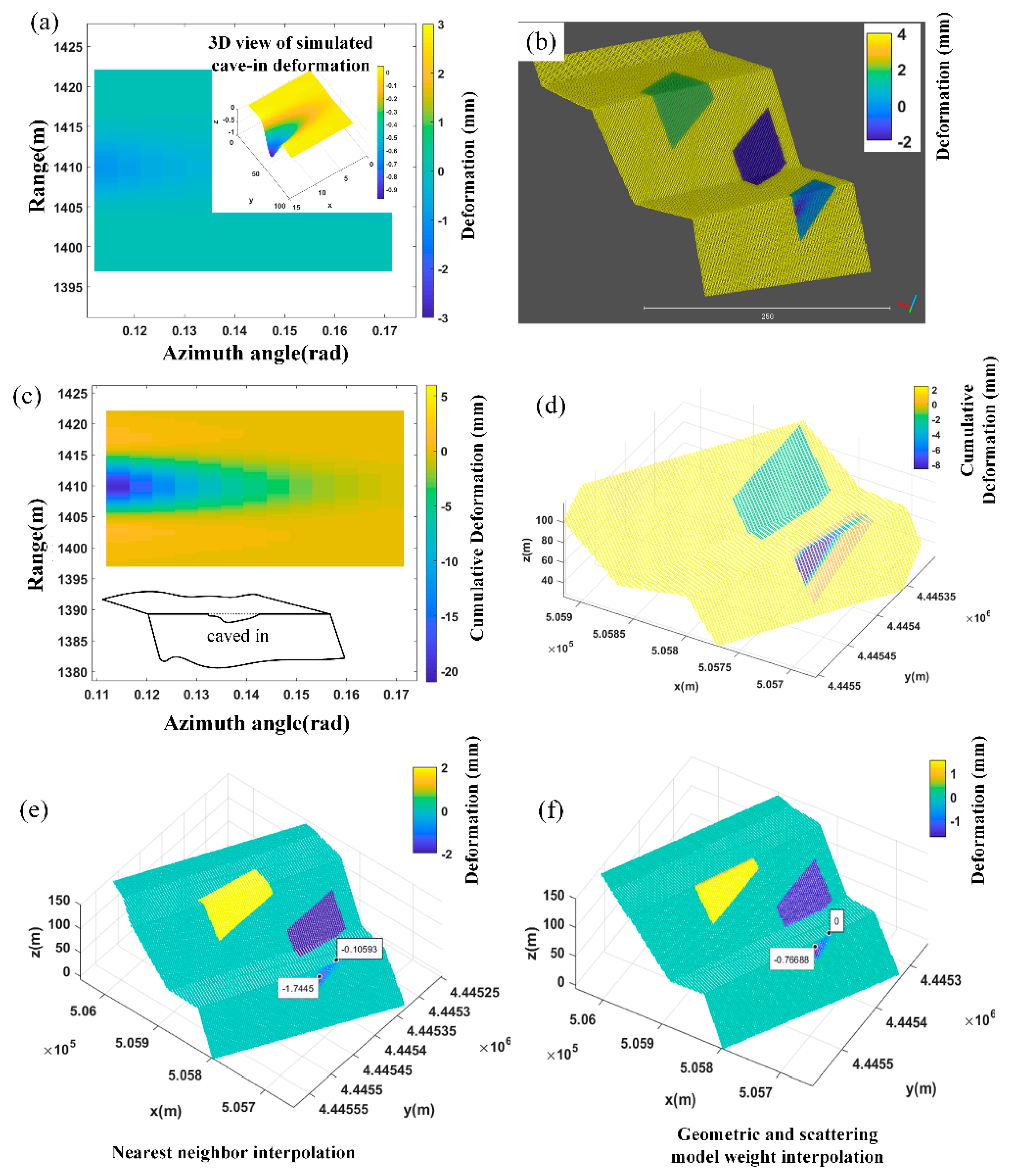
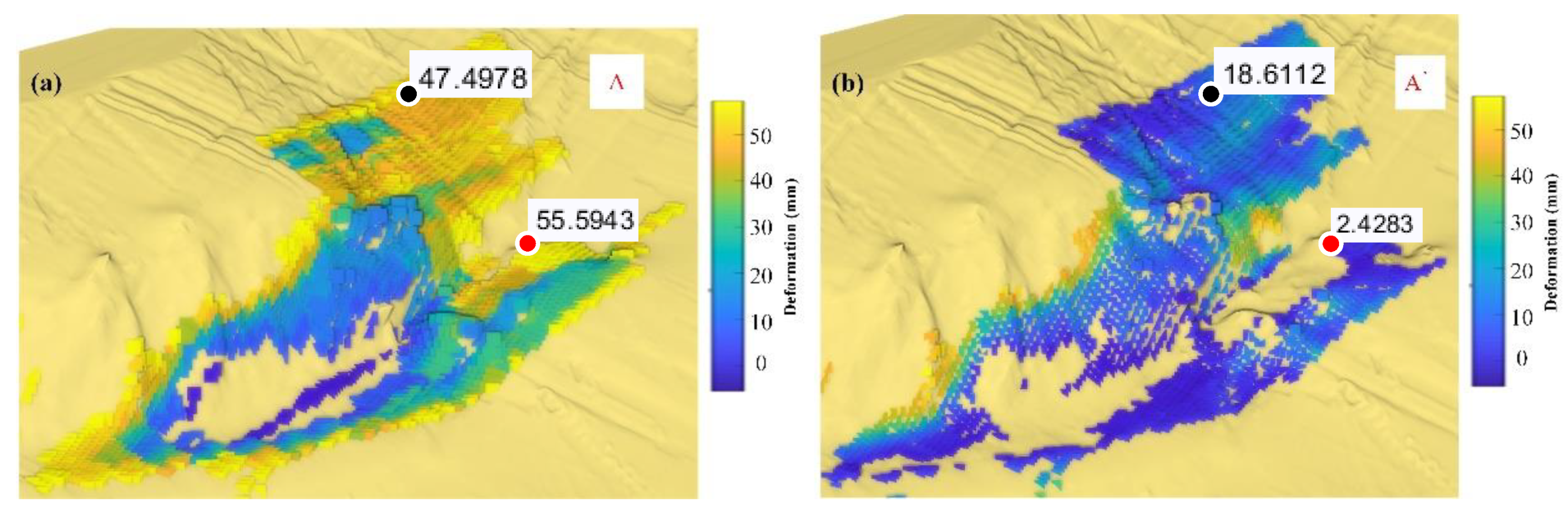
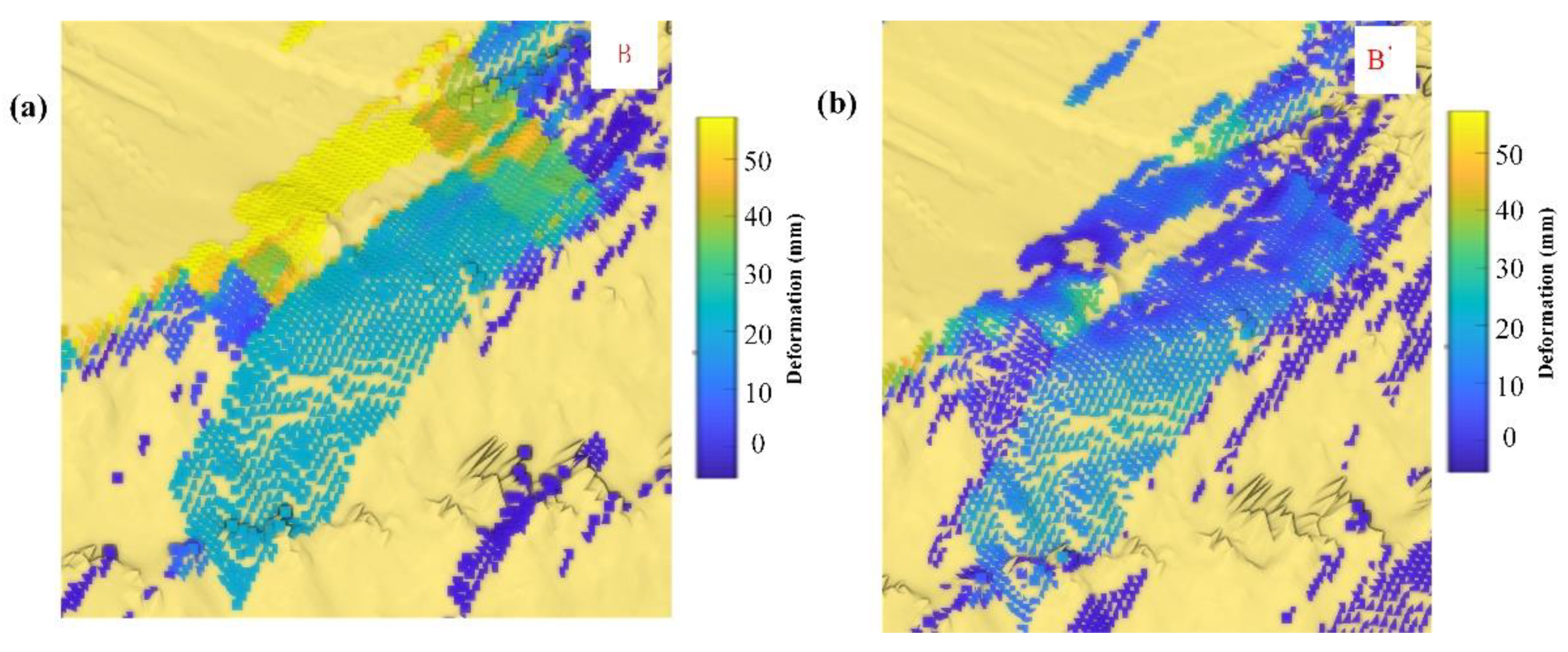
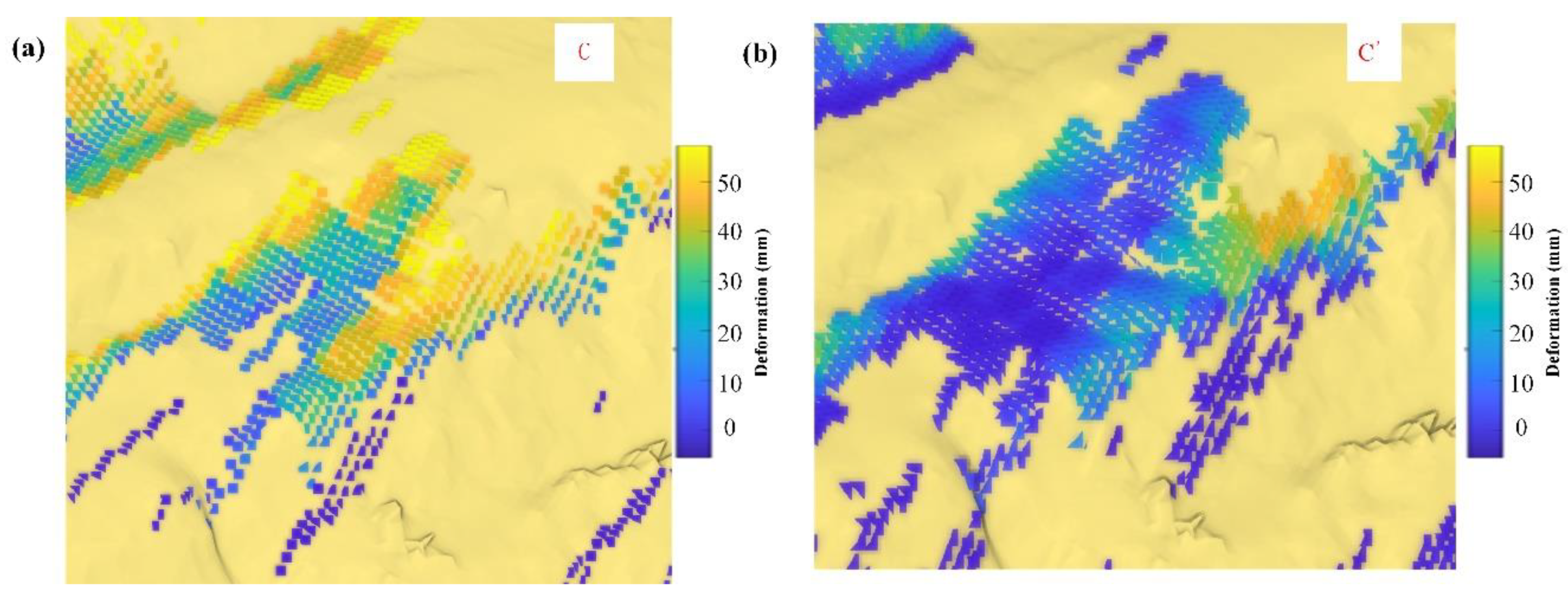
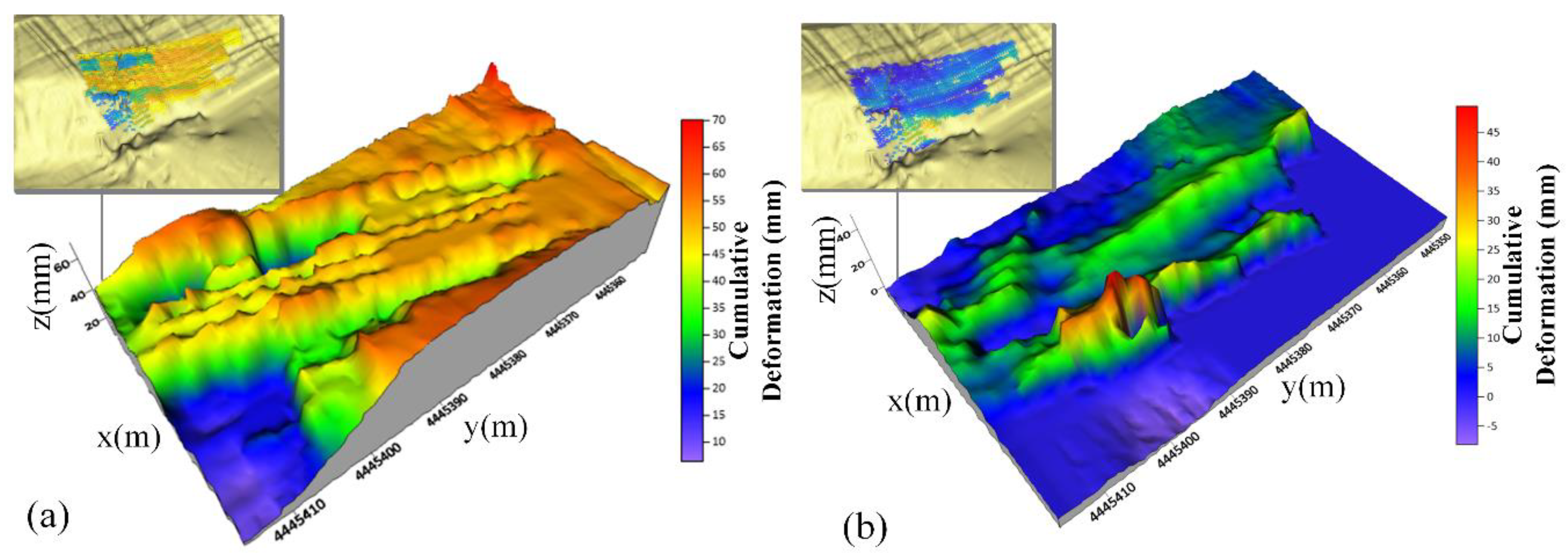
- The GB-InSAR image pixel contains several targets. Due to the limited spatial resolution, these targets can be equivalent to one vital “scattering target”. The terrain point cloud model spatial resolution is higher than radar. The local area with a good incident angle in the radar pixel plays a major role in forming "sub-targets", and the shape variables are distributed on these distributed sub-targets. In this study, the deformation on the road surface is not eliminated, and their deformation is concentrated on the distributed sub-targets with good incident angles on the road surface.
- If the precise deformation in the radar pixel is known through the ground control points or global navigation satellite system (GNSS) and other high time resolution measuring instruments, a more accurate model of mapping can be established. The optimizing objective function the least square solution of the temporal sequence deformation of each sub-target and the deformation function of the radar pixel.
6. Conclusions
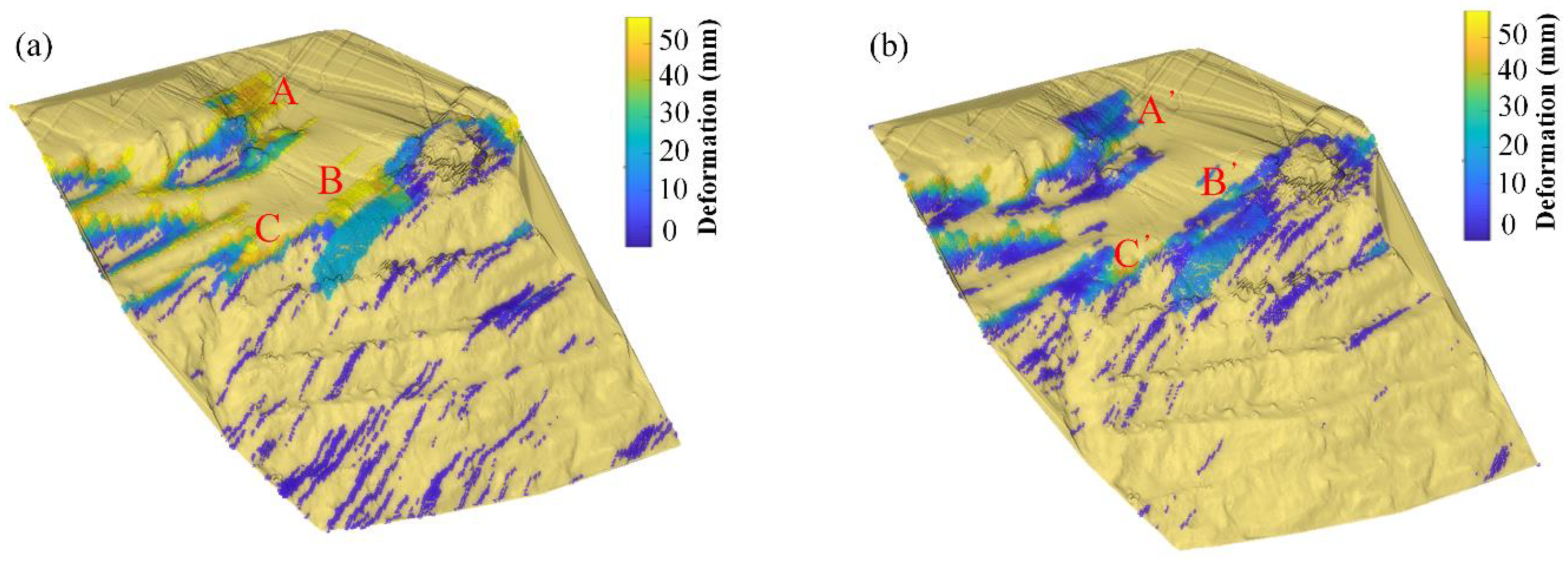
- The pavement and slope surface deformation were differentiated.
- The parameters can be adjusted to avoid band-like phenomena in the experiment.
- The abnormal deformed boundaries were relieved to a certain extent.
Author Contributions
Funding
Conflicts of Interest
References
- Zheng, X.; Yang, X.; Ma, H.; Ren, G.; Zhang, K.; Yang, F.; Li, C. Integrated Ground-Based SAR Interferometry, Terrestrial Laser Scanner, and Corner Reflector Deformation Experiments. Sensors 2018, 18, 4401. [Google Scholar] [CrossRef] [PubMed]
- Pieraccini, M.; Miccinesi, L. Ground-Based Radar Interferometry: A Bibliographic Review. Remote Sens. 2019, 11, 1029. [Google Scholar] [CrossRef]
- Carla, T.; Tofani, V.; Lombardi, L.; Raspini, F.; Bianchini, S.; Bertolo, D.; Thuegaz, P.; Casagli, N. Combination of GNSS, satellite InSAR, and GBInSAR remote sensing monitoring to improve the understanding of a large landslide in high alpine environment. Geomorphology 2019, 335, 62–75. [Google Scholar] [CrossRef]
- Xiaolin, Y.; Yanping, W.; Yaolong, Q.; Weixian, T.; Wen, H. Experiment study on deformation monitoring using ground-based SAR. Synthetic Aperture Radar. In Proceedings of the Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Tsukuba, Japan, 23–27 September 2013. [Google Scholar]
- Tapete, D.; Casagli, N.; Luzi, G.; Fanti, R.; Gigli, G.; Leva, D. Integrating radar and laser-based remote sensing techniques for monitoring structural deformation of archaeological monuments. J. Archaeol. Sci. 2013, 40, 176–189. [Google Scholar] [CrossRef]
- Pieraccini, M.; Miccinesi, L. An Interferometric MIMO Radar for Bridge Monitoring. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1383–1387. [Google Scholar] [CrossRef]
- Intrieri, E.; Gigli, G.; Nocentini, M.; Lombardi, L.; Mugnai, F.; Fidolini, F.; Casagli, N. Sinkhole monitoring and early warning: An experimental and successful GB-InSAR application. Geomorphology 2015, 241, 304–314. [Google Scholar] [CrossRef]
- Luzi, G.; Pieraccini, M.; Mecatti, D.; Noferini, L.; Macaluso, G.; Tamburini, A.; Atzeni, C. Monitoring of an Alpine Glacier by Means of Ground-Based SAR Interferometry. IEEE Geosci. Remote Sens. Lett. 2007, 4, 495–499. [Google Scholar] [CrossRef]
- Wang, P.; Xing, C. Research on Coordinate Transformation Method of GB-SAR Image Supported by 3D Laser Scanning Technology. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-3, 1757–1763. [Google Scholar] [CrossRef]
- Hu, C.; Deng, Y.; Wang, R.; Tian, W.; Zeng, T. Two-Dimensional Deformation Measurement Based on Multiple Aperture Interferometry in GB-SAR. IEEE Geosci. Remote Sens. Lett. 2016, 14, 208–212. [Google Scholar] [CrossRef]
- Sansosti, E.; Berardino, P.; Manunta, M.; Serafino, F.; Fornaro, G. Geometrical SAR image registration. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2861–2870. [Google Scholar] [CrossRef]
- Yue, J.; Yue, S.; Wang, X.; Guo, L. Research on multi-source data integration and the extraction of three-dimensional displacement field based on GBSAR. In Proceedings of the International Workshop on Thin Films for Electronics, Electro-Optics, Energy and Sensors, Suzhou, China, 4–6 July 2015. [Google Scholar]
- Zou, J.; Tian, J.; Chen, Y.; Mao, Q.; Li, Q. Research on Data Fusion Method of Ground-Based SAR and 3D Laser Scanning. J. Geomat. 2015, 40, 26–30. [Google Scholar]
- Yang, J.; Qi, Y.L.; Tan, W.X.; Yanping, W.; Wen, H. Three-dimensional matching algorithm for geometric mapping between GB-SAR image and terrain data. J. Univ. Chin. Acad. Sci. 2015, 32, 422–427. (In Chinese) [Google Scholar]
- Lombardi, L.; Nocentini, M.; Frodella, W.; Nolesini, T.; Bardi, F.; Intrieri, E.; Carlà, T.; Solari, L.; Dotta, G.; Ferrigno, F.; et al. The Calatabiano landslide (southern Italy): Preliminary GB-InSAR monitoring data and remote 3D mapping. Landslides 2017, 14, 685–696. [Google Scholar] [CrossRef]
- Zheng, X.; Yang, X.; Ma, H.; Ren, G.; Yu, Z.; Yang, F.; Zhang, H.; Gao, W. Integrative Landslide Emergency Monitoring Scheme Based on GB-INSAR Interferometry, Terrestrial Laser Scanning and UAV Photography. J. Phys. Conf. Ser. 2019, 1213. [Google Scholar] [CrossRef]
- Available online: http://www.riegl.com/nc/products/terrestrial-scanning/ (accessed on 28 March 2020).
- Ulaby, F.; Long, D.; Blackwell, W.; Elachi, C.; Fung, A.K.; Ruf, C.; Sarabandi, K.; van Zyl, J.; Zebker, H. Microwave Radar and Radiometric Remote Sensing; University of Michigan Press: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Hoppe, H.; Derose, T.; Duchamp, T.; McDonald, J.; Stuetzle, W. Surface reconstruction from unorganized points. In Proceedings of the 19th Annual Conference on Computer Graphics and Interactive Techniques, Chicago, IL, USA, 26–31 July 1992; Volume 26, pp. 71–78. [Google Scholar]
















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, X.; He, X.; Yang, X.; Ma, H.; Yu, Z.; Ren, G.; Li, J.; Zhang, H.; Zhang, J. Terrain Point Cloud Assisted GB-InSAR Slope and Pavement Deformation Differentiate Method in an Open-Pit Mine. Sensors 2020, 20, 2337. https://doi.org/10.3390/s20082337
Zheng X, He X, Yang X, Ma H, Yu Z, Ren G, Li J, Zhang H, Zhang J. Terrain Point Cloud Assisted GB-InSAR Slope and Pavement Deformation Differentiate Method in an Open-Pit Mine. Sensors. 2020; 20(8):2337. https://doi.org/10.3390/s20082337
Chicago/Turabian StyleZheng, Xiangtian, Xiufeng He, Xiaolin Yang, Haitao Ma, Zhengxing Yu, Guiwen Ren, Jiang Li, Hao Zhang, and Jinsong Zhang. 2020. "Terrain Point Cloud Assisted GB-InSAR Slope and Pavement Deformation Differentiate Method in an Open-Pit Mine" Sensors 20, no. 8: 2337. https://doi.org/10.3390/s20082337
APA StyleZheng, X., He, X., Yang, X., Ma, H., Yu, Z., Ren, G., Li, J., Zhang, H., & Zhang, J. (2020). Terrain Point Cloud Assisted GB-InSAR Slope and Pavement Deformation Differentiate Method in an Open-Pit Mine. Sensors, 20(8), 2337. https://doi.org/10.3390/s20082337