3.2. Specification of Change Detection
Let us define the following notation to describe the process of extracting an individual’s travel pattern:
, : datasets at time periods t1, t2
: a dataset formed by merging and
, : discovered spatial pattern sets at time periods t1, t2
: discovered spatial pattern set of
, : each spatial pattern from the corresponding pattern set , ,
where ,
: spatial pattern in , where i = 1,2, …
, : frequency of , , where ,
, : frequency set at time period t1, t2
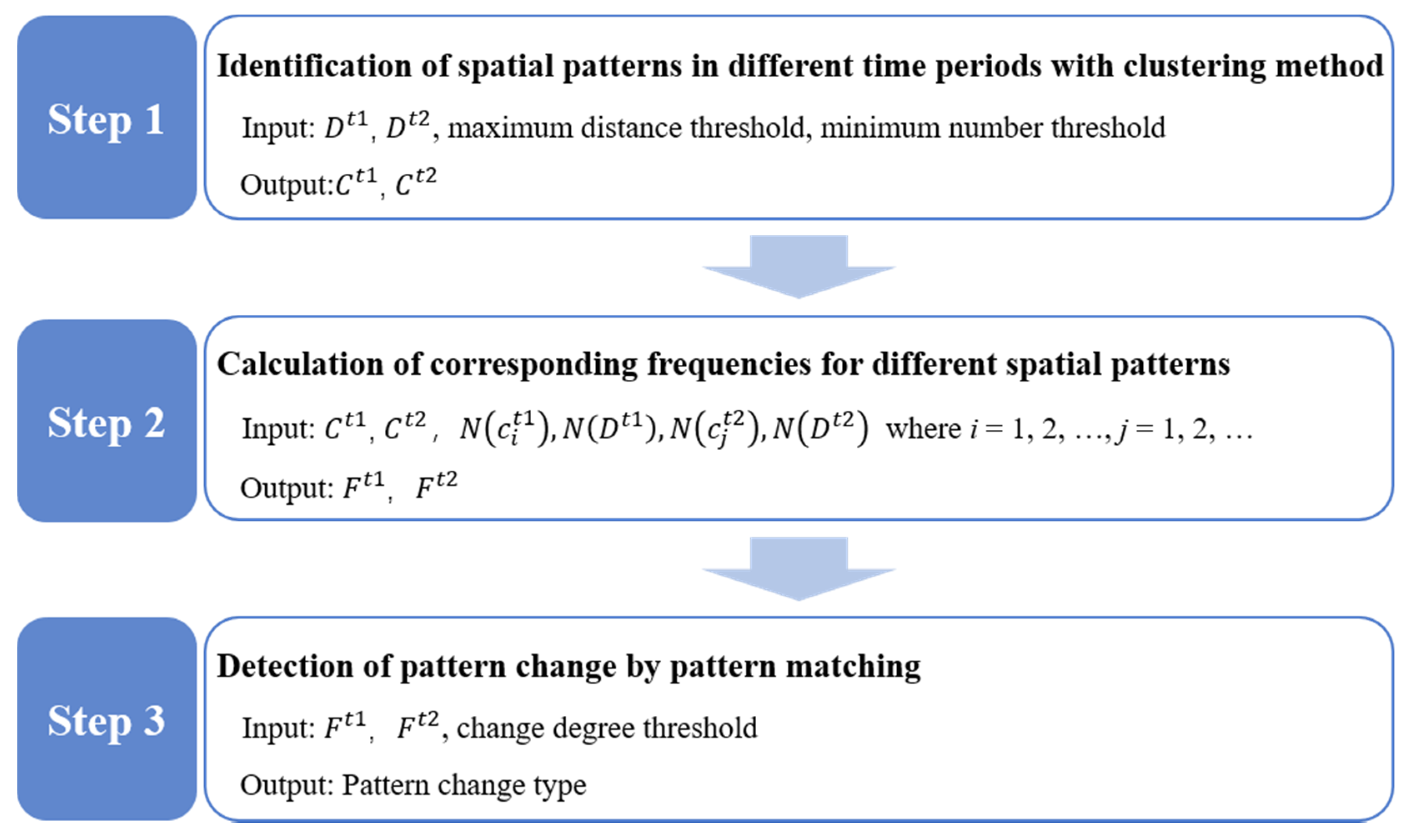
The framework of the proposed methodology for the change detection problem, consisting of three steps, is shown in
Figure 2.
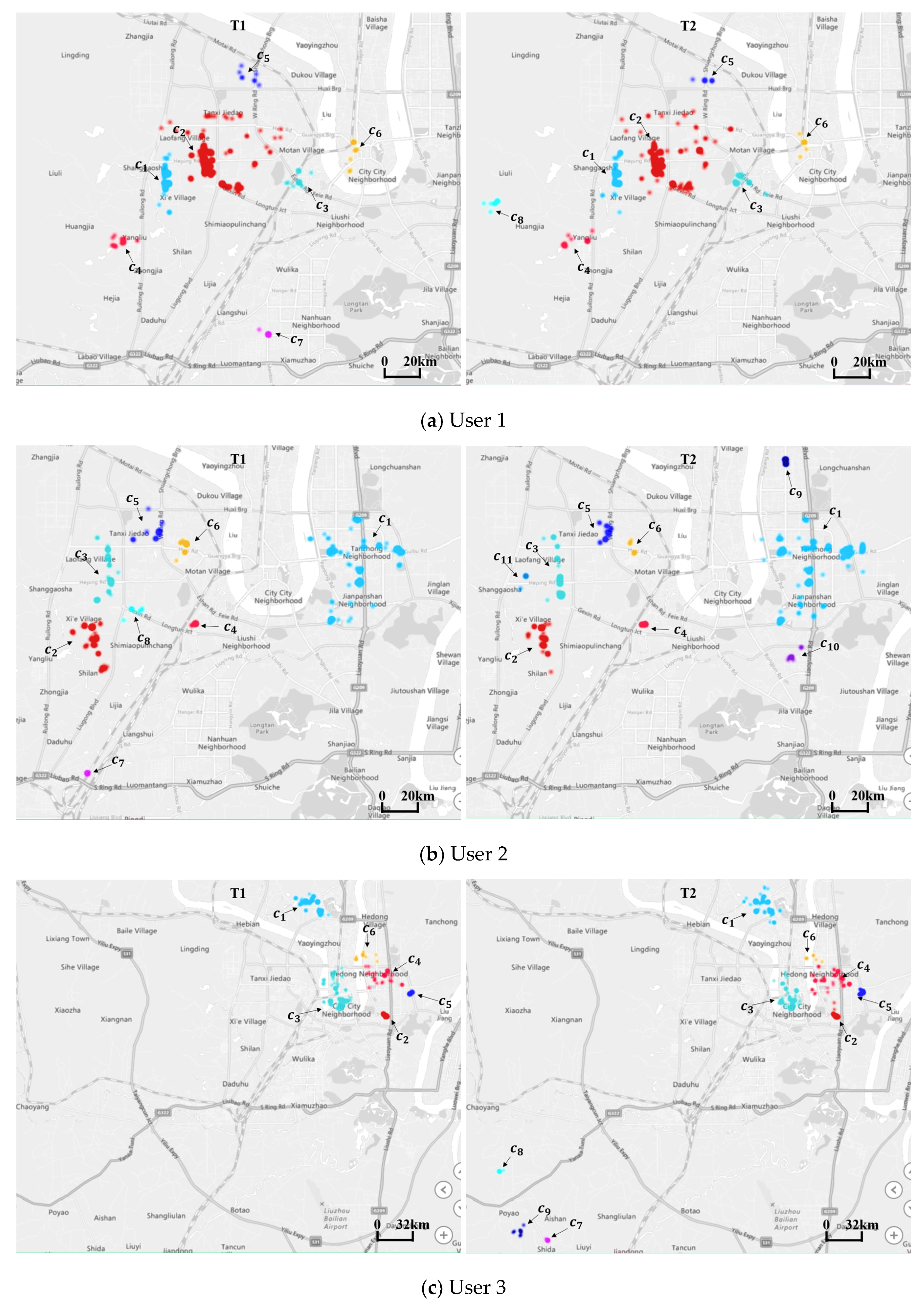
Step 1 Identification of spatial patterns in different time periods using clustering.
Cars equipped with GPS/GNSS transmit the vehicle’s location to data centers at regular intervals. Data transmission starts when the vehicle is started and ends when the vehicle is turned off. The transmitted data usually contain the car’s latitude and longitude at different times. In this paper, we use the vehicle’s position at the end of every trip. Clustering techniques are important when it comes to extracting knowledge from a large amount of spatial data. Several clustering methods have become popular for extracting useful patterns from large-scale spatial data. DBSCAN is a pioneering density-based algorithm that can discover clusters of any arbitrary shape and size, even in databases containing noise and outliers. For the DBSCAN algorithm, we need a dataset, the maximum spatial distance value (Eps), and the minimum number of points within the Eps distance (MinPts) as inputs. The algorithm’s output is a set of clusters. If a point in the dataset does not belong to any cluster, it is marked as noise. In this paper, the DBSCAN method is adopted, and the identified clusters represent frequently visited regions.
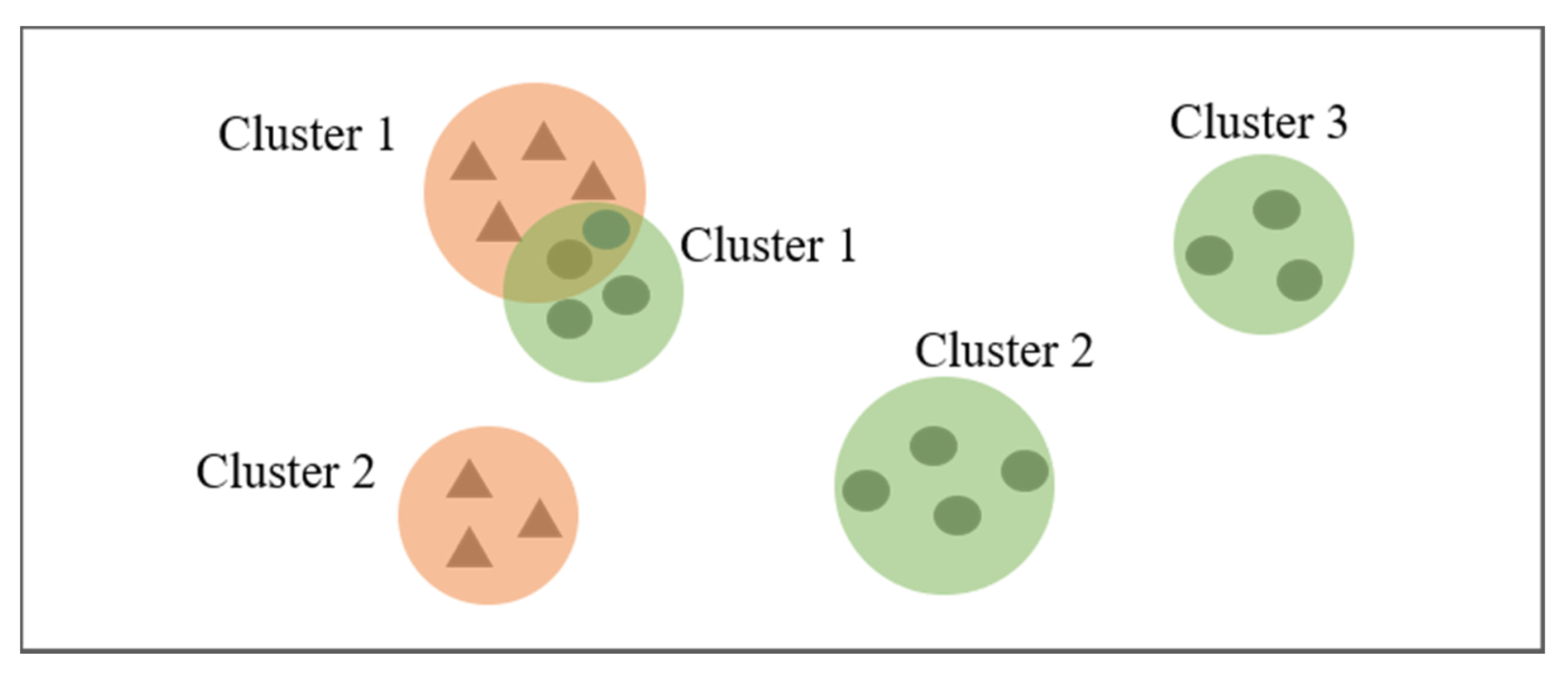
The most common approach to discovering changes between two datasets is to generate patterns from each dataset and directly compare the patterns using pattern matching. However, if DBSCAN is run on two datasets separately, a problem may arise, as illustrated in
Figure 3. In the figure, the triangular points belong to
, and the elliptic points belong to
. The red regions represent clusters generated from
, and the green regions represent the clusters generated from
. As we can see, although Cluster 2 from
and
are marked with the same cluster label, they are two completely different clusters. Therefore, they cannot be compared directly; the relationship between clusters generated from different datasets must be evaluated, and the cluster labels should be updated. However, this process increases the complexity of solving the problem.
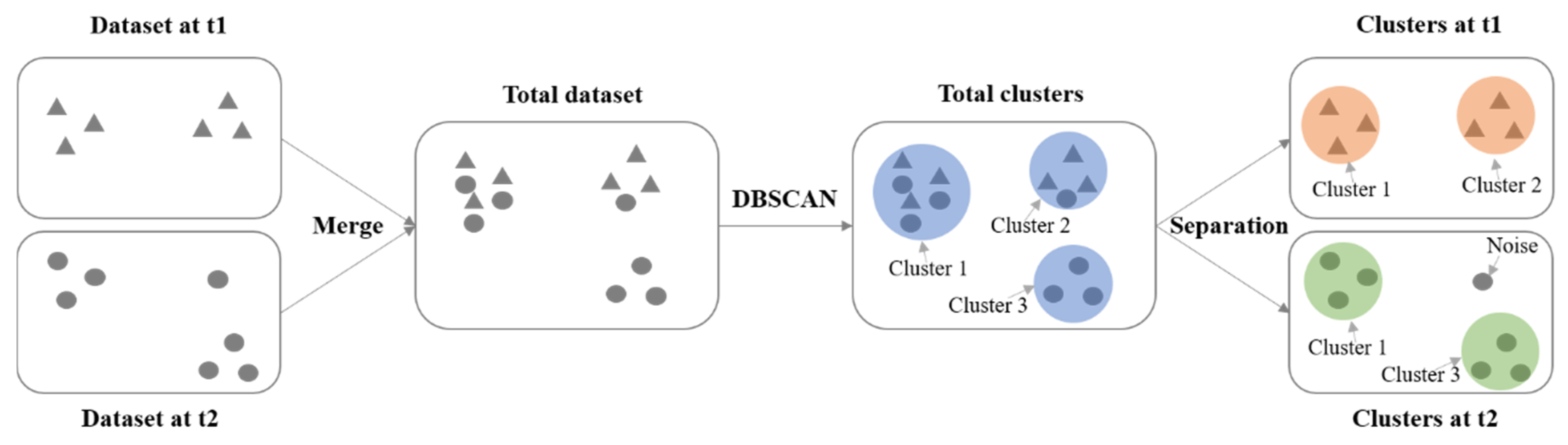
In our research, we developed the simpler approach shown in
Figure 4. First, the datasets generated at different time periods are merged into a total dataset. Then, DBSCAN is performed on the total dataset to detect clusters. Finally, for every cluster of the total dataset, the points belonging to different time periods are separated. If the number of the separated points is no smaller than
MinPts, then the separated points are identified as a cluster of the original dataset, marked with the same cluster label as from the clusters from the total datasets; otherwise, they are marked as noise.
The pseudocode of the total calculation is shown in Algorithm 1:
| Algorithm 1 Pattern identification algorithm. |
| Procedure: Pattern identification (,, Eps, MinPts) |
| 1: combine and into a new dataset |
| 2: DBSCAN (, Eps, MinPts) |
| 3: for every cluster i in do |
| 4: for every point j in cluster i do |
| 5: if point j ∈ then |
| 6: mark the point j in with label i |
| 7: else |
| 8: mark the point j in with label i |
| 9: for every cluster m in do |
| 10: if the number of points in cluster m < MinPts then |
| 11: mark the points in cluster m as noise |
| 12: for every cluster n in do |
| 13: if the number of points in cluster n < MinPts then |
| 14: mark the points in cluster n as noise |
|
return , |
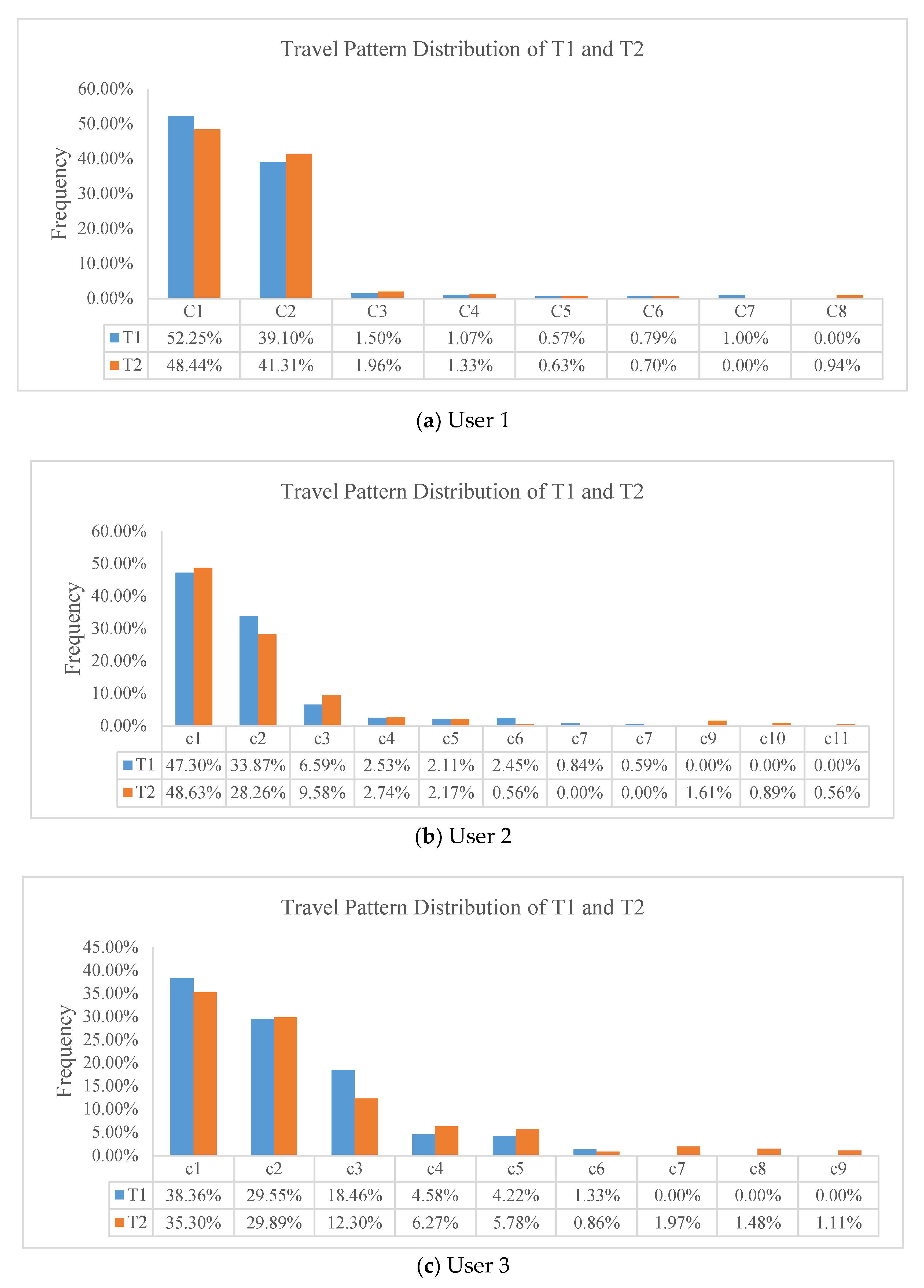
Step 2 Calculation of corresponding frequencies for different spatial patterns.
For our explanation of frequency, we briefly define the following notation:
, : Number of points in , , where ,
, : Number of points in ,
Now, we provide the calculation of
, as shown in Equations (1) and (2):
The pseudocode of the total calculation is shown in Algorithm 2:
| Algorithm 2: Frequency calculation algorithm. |
| Procedure Frequency () |
| 1: for every cluster i in do |
| 2: calculate the frequency with |
| 3: for every cluster j in do |
| 4: calculate the frequency with |
| return , |
Step 3 Detection of pattern changes by pattern matching.
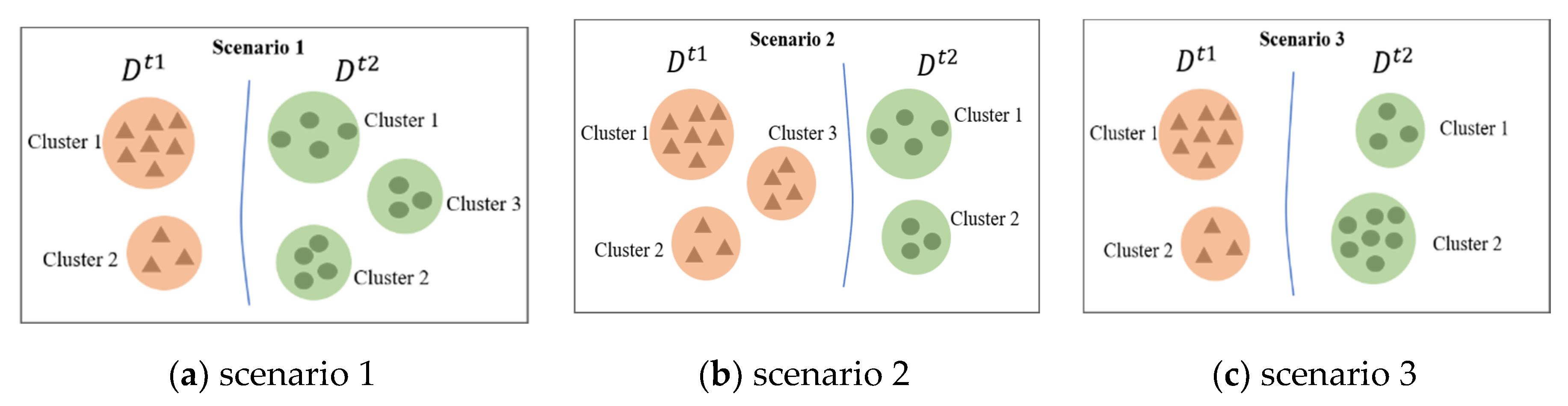
When the clusters and corresponding frequencies of different datasets are compared, there are three basic pattern-change scenarios, as shown in
Figure 5.
Scenario 1: InFigure 5a, Cluster 3 arises inbut not in. Scenario 2: Cluster 3 exists inbut not in, as shown inFigure 5b. Scenario 3: Clusters 1 and 2 exist in bothand, but the frequencies of each cluster differ significantly between time periods t1 and t2, as shown in Figure 5c. In this study, we mark the newly arising clusters as
New and disappearing clusters as
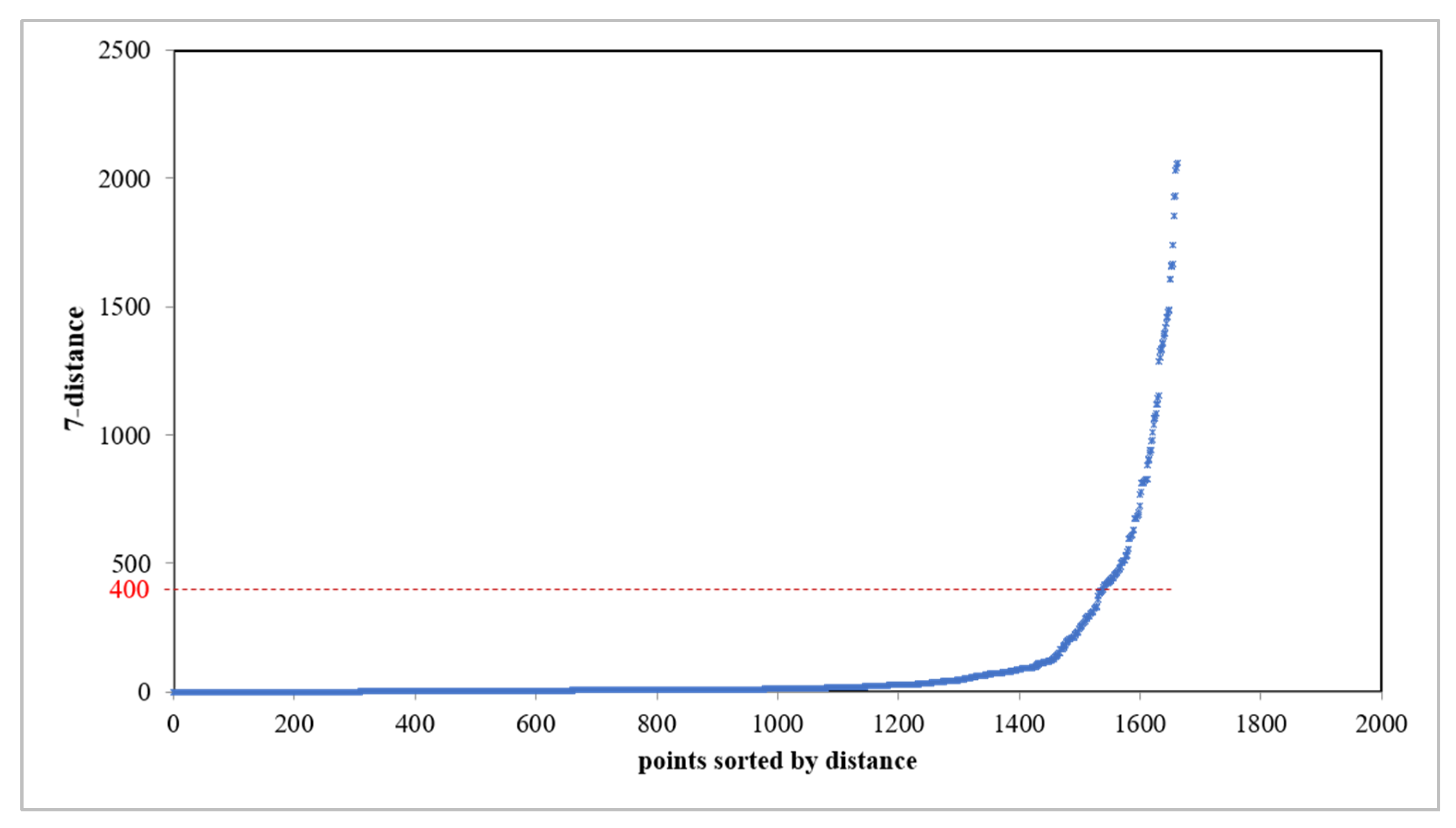
Vanished. To better describe the change presented in Scenario 3, we propose a measure of the degree of change. The calculation of this measure is shown in Equation (3).
where
represents the degree of change of
. A
threshold for
should be defined manually. In other words, only if
is no less than the threshold should cluster
be identified as a changed pattern; otherwise, it is identified as an unchanged pattern. If
is a changed pattern, it is marked as
Increased if
is less than
; otherwise, it is marked as
Decreased. Unchanged patterns are marked as
Unchanged.
The pseudocode of the total calculation is shown in Algorithm 3:
| Algorithm 3: Pattern-matching algorithm. |
| Procedure Pattern match (, , change degree threshold) |
| 1: for in and f in && i = j do |
| 2: if then |
| 3: mark pattern as New break |
| 4: if then |
| 5: mark pattern as Vanished break |
| 6: if then |
| 7: mark pattern as Unchanged break |
| 8: Calculate the change rate with |
| 9: if then |
| 10: if f then |
| 11: mark pattern as Decreased |
| 12: else |
| 13: mark pattern as Increased |
| 14: else |
| 15: mark pattern as Unchanged |
| return |










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}