In-Situ LED-Based Observation of Snow Surface and Depth Transects


Abstract
1. Introduction
2. Materials and Methods
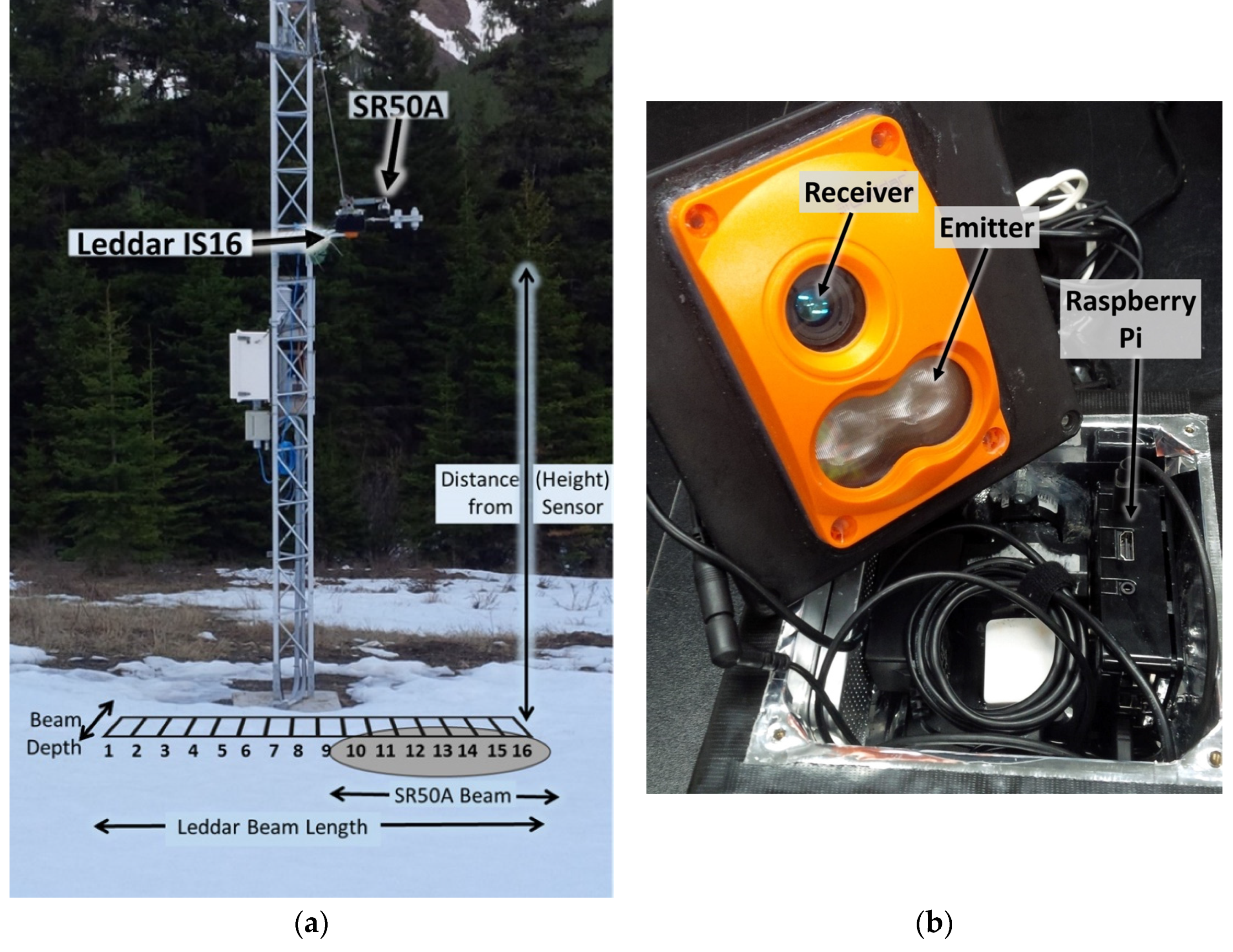
2.1. Leddar and SR50A Sensor Specifications
2.2. Field Deployment Setup, Configuration, and Data
2.2.1. LeddarTech IS16 (Leddar) Configuration and Laboratory Calibration
2.2.2. SR50A Sonic Ranging Device
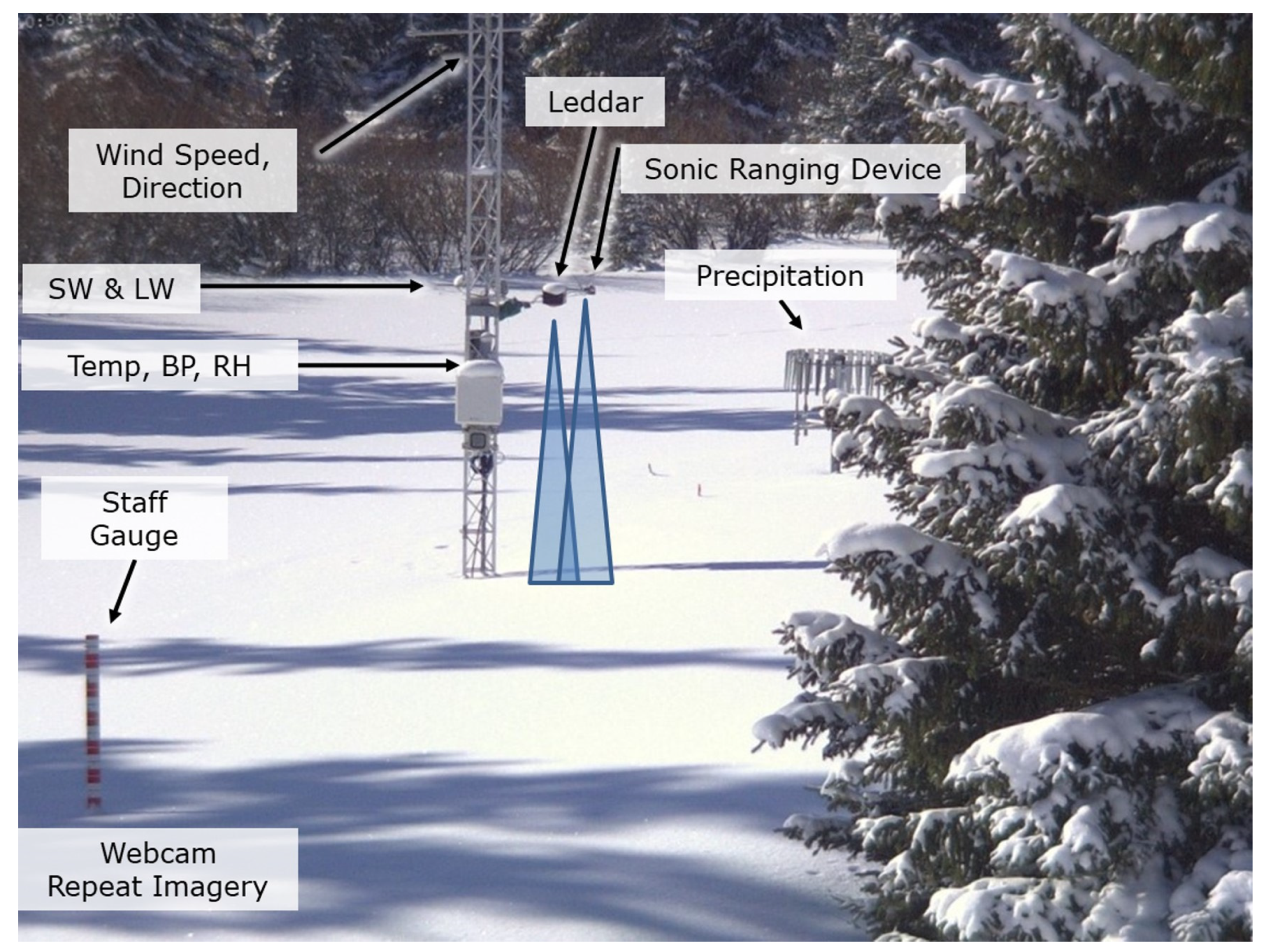
2.2.3. Meteorological Sensors
2.3. Aggregated Datasets for Analysis
2.4. Controls on the Leddar Intensity Signal
2.5. In-Situ Evaluation of LeddarTech IS16 Sensor’s Precision, Accuracy, and Performance
3. Results and Discussion
3.1. LeddarTech IS16 Sensor Performance
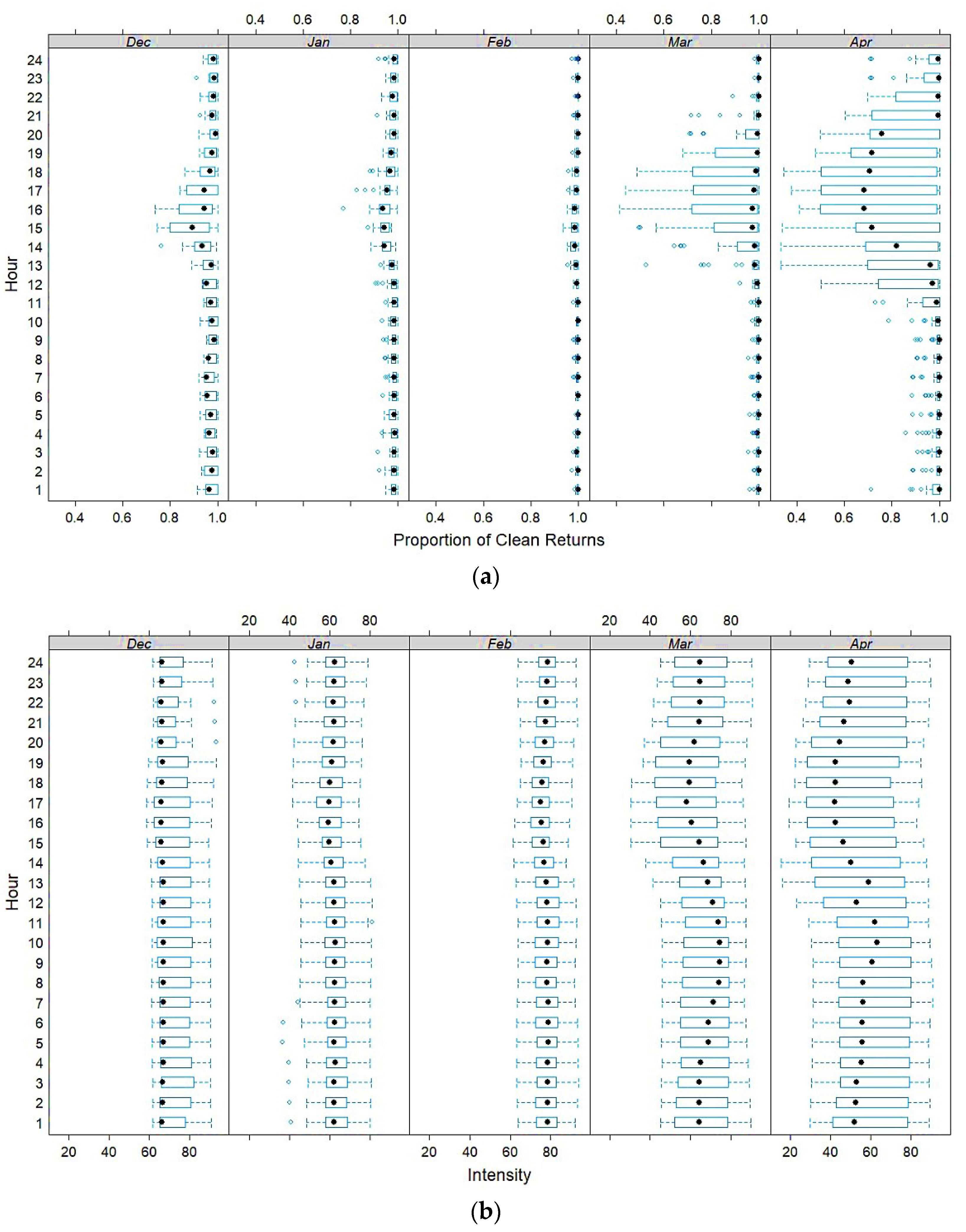
3.1.1. Signal Data Noise
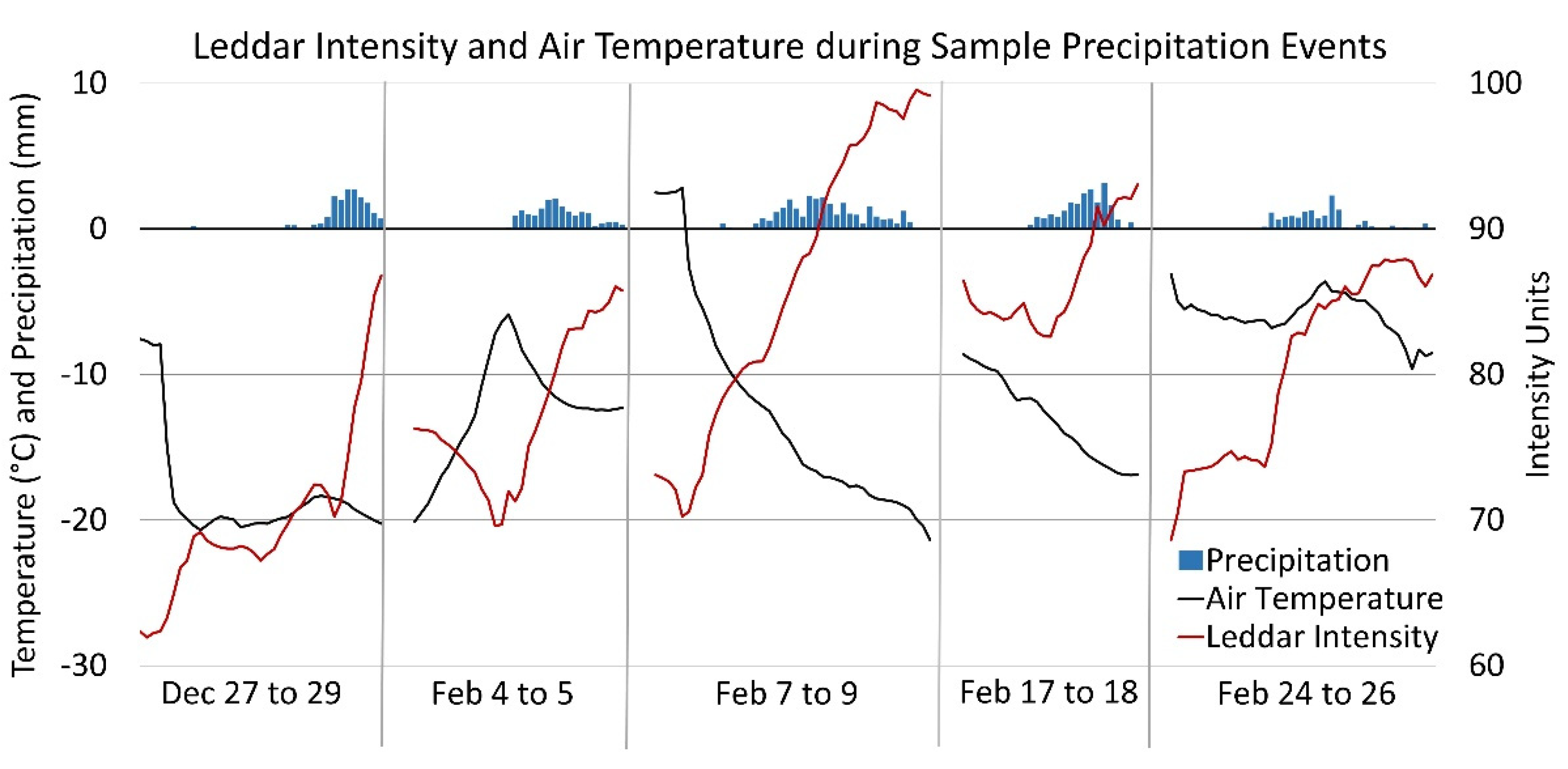
3.1.2. Temperature Sensitivity
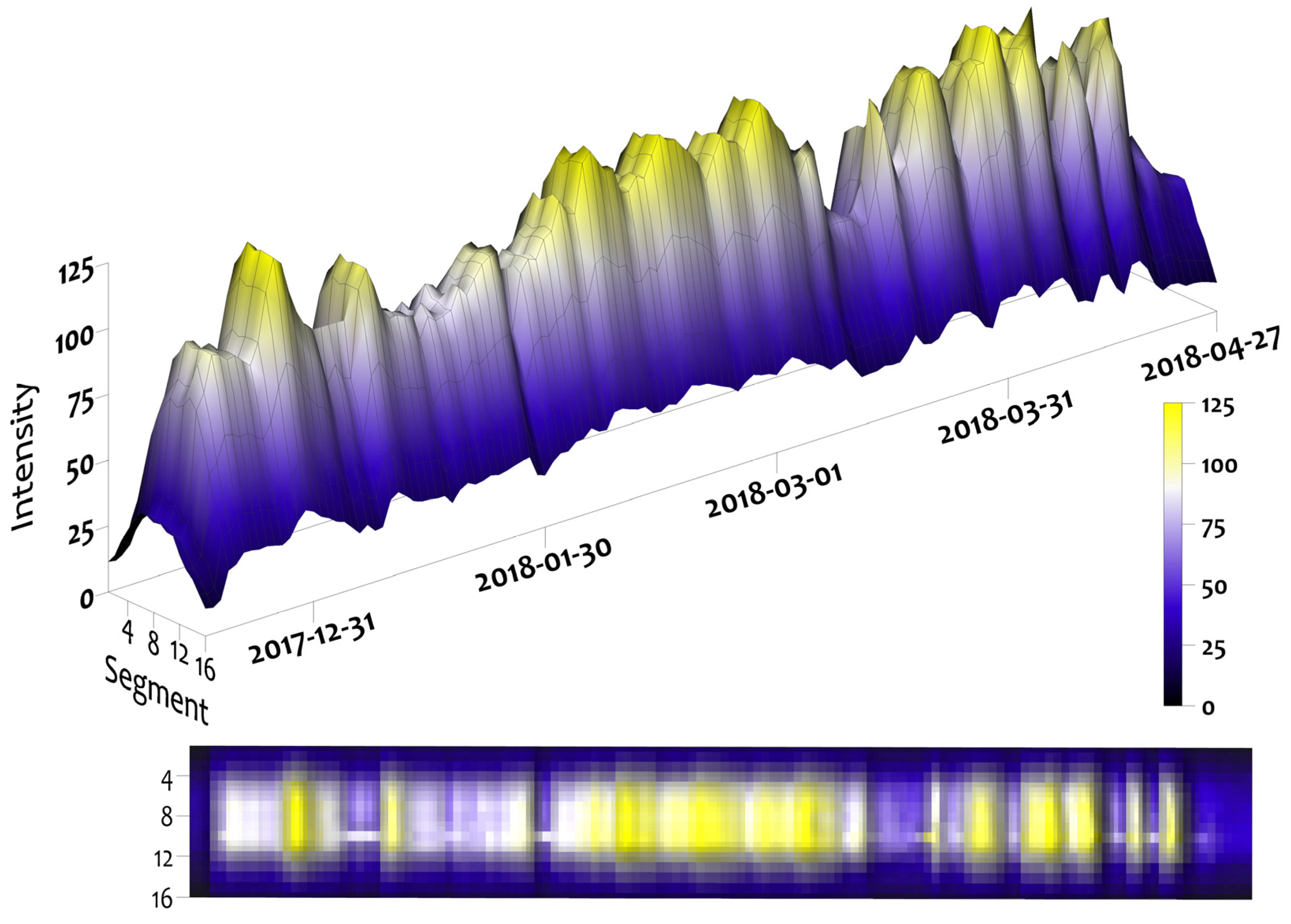
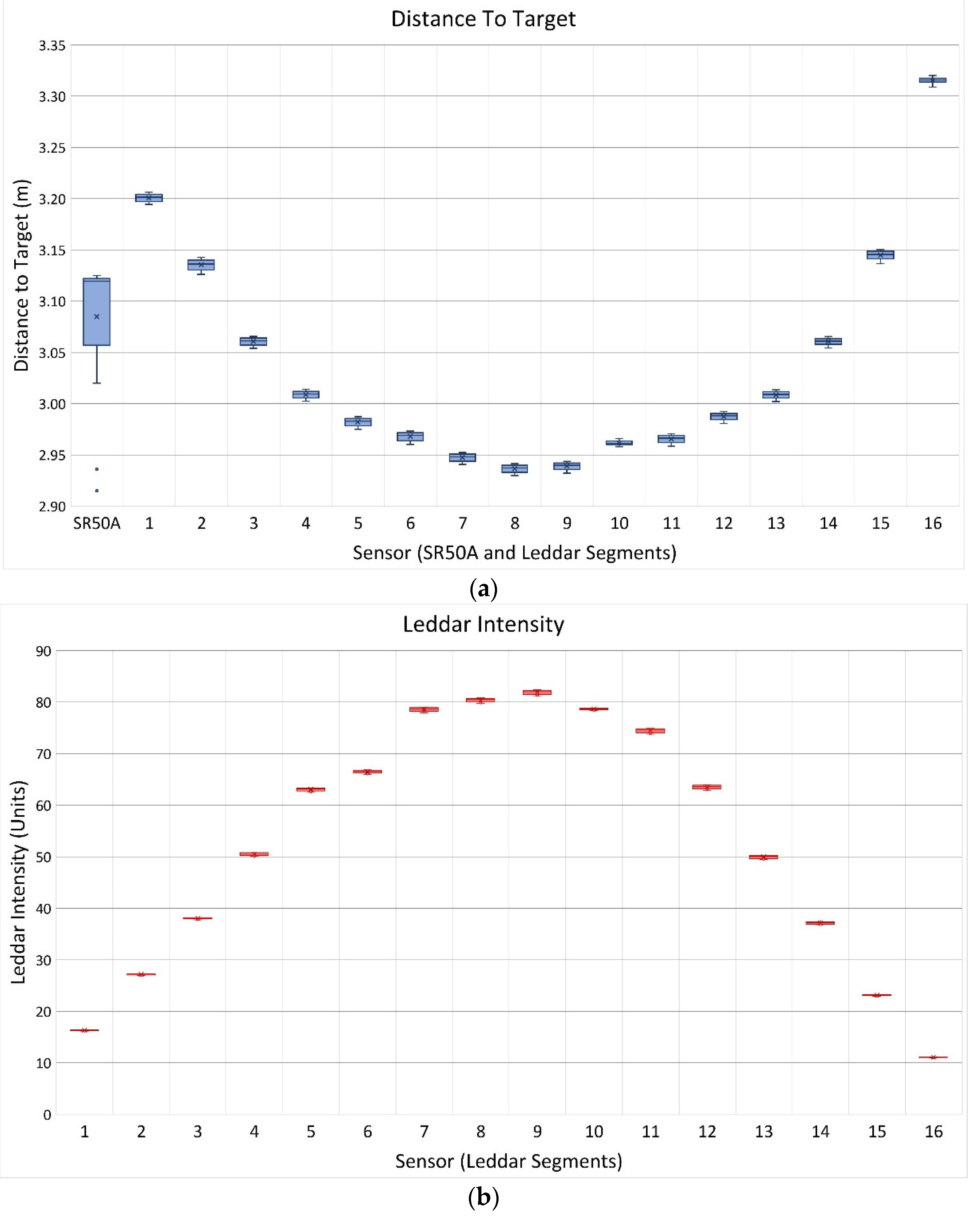
3.1.3. Controls on the Leddar Intensity Signal
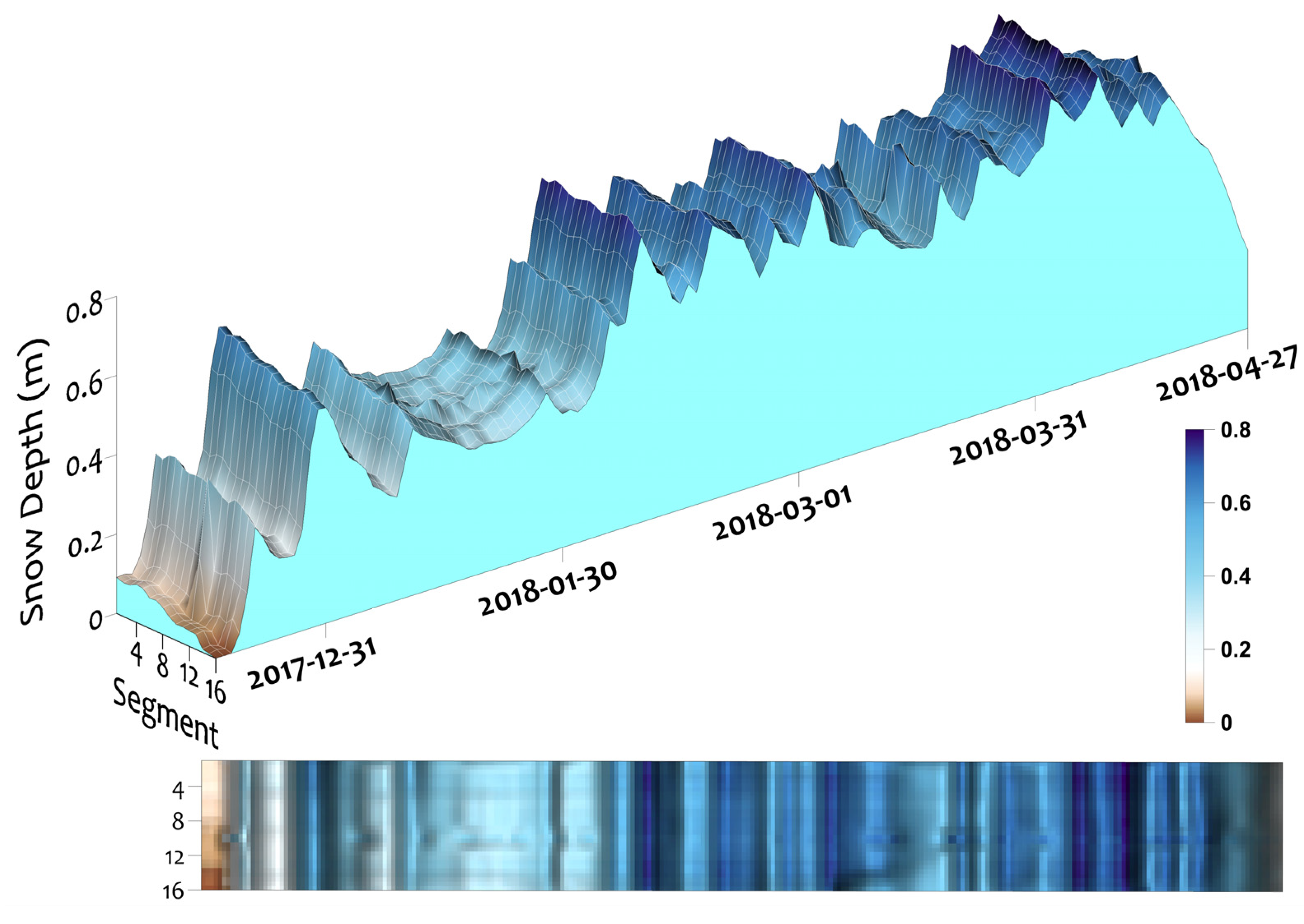
3.2. Range and Depth Observations
3.2.1. Leddar Calibration
3.2.2. Snow Depth Validation
3.2.3. Leddar Snow Depth Stability
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Natural Resources Canada. Atlas of Canada, Average Maximum Snow Depth, 6th ed; N.R.C. Government of Canada, Earth Sciences Sector, Atlas of Canada, Eds.; Government of Canada, Natural Resources Canada, Earth Sciences Sector, Atlas of Canada: Ottawa, ON, Canada, 2010. [Google Scholar]
- Barrows, H.K.; Horton, R.E. Determination of Stream Flow During the Frozen Season; US Government Printing Office: Washington, DC, USA, 1907.
- Paznekas, A.; Hayashi, M. Groundwater Contribution to Winter Streamflow in the Canadian Rockies. Can. Water Resour. J. Rev. Can. Des Ressour. Hydr. 2016, 41, 484–499. [Google Scholar] [CrossRef]
- Grünewald, T.; Schirmer, M.; Mott, R.; Lehning, M. Spatial and temporal variability of snow depth and SWE in a small mountain catchment. Cryosphere 2010, 4, 215–225. [Google Scholar] [CrossRef]
- Government of Alberta. Snow Does Not Equal Flood: Alberta’s Snowmelt and its Impact on Alberta Rivers; alberta.ca: Edmonton, AB, Canada, 2018. [Google Scholar]
- Kinar, N.J.; Pomeroy, J.W. Measurement of the physical properties of the snowpack. Rev. Geophys. 2015, 53, 481–544. [Google Scholar] [CrossRef]
- López-Moreno, J.I.; Fassnacht, S.R.; Heath, J.T.; Musselman, K.N.; Revuelto, J.; Latron, J.; Morán-Tejeda, E.; Jonas, T. Small scale spatial variability of snow density and depth over complex alpine terrain: Implications for estimating snow water equivalent. Adv. Water Resour. 2013, 55, 40–52. [Google Scholar] [CrossRef]
- Pickering, R. Snow Surveying Field Sampling Protocols; Enrollment Management and Services Division, Ed.; Alberta Environment and Parks: Edmonton, AB, Canada, 2018; p. 10. [Google Scholar]
- Campbell, S. Acoustic Snow Depth Sensor Operation; Enrollment Management and Services Division, Ed.; Alberta Environment and Parks: Edmonton, AB, Canada, 2018; p. 7. [Google Scholar]
- Gubler, H. An inexpensive remote snow-depth gauge based on ultrasonic wave reflection from the snow surface. J. Glaciol. 1981, 27, 157–163. [Google Scholar] [CrossRef][Green Version]
- Ryan, W.A.; Doesken, N.J.; Fassnacht, S.R. Evaluation of ultrasonic snow depth sensors for u.s. snow measurements. J. Atmos. Ocean. Technol. 2008, 25, 667–684. [Google Scholar] [CrossRef]
- Warren, S.G. Optical properties of ice and snow. Philos. Trans. R. Soc. A 2019, 377, 20180161. [Google Scholar] [CrossRef]
- Fischer, A.P. The measurement factors in estimating snowfall derived from snow cover surfaces using acoustic snow depth sensors. J. Appl. Meteorol. Clim. 2011, 50, 681–699. [Google Scholar] [CrossRef]
- Pomeroy, J.W.; Gray, D.M.; Shook, K.R.; Toth, B.; Essery, R.L.H.; Pietroniro, A.; Hedstrom, N. An evaluation of snow accumulation and ablation processes for land surface modelling. Hydrol. Process. 1998, 12, 2339–2367. [Google Scholar] [CrossRef]
- Essery, R.; Li, L.; Pomeroy, J. A distributed model of blowing snow over complex terrain. Hydrol. Process. 1999, 13, 2423–2438. [Google Scholar] [CrossRef]
- Warren, S.G. Optical properties of snow. Rev. Geophys. 1982, 20, 67–89. [Google Scholar] [CrossRef]
- Deems, J.S.; Painter, T.H.; Finnegan, D.C. Lidar measurement of snow depth: A review. J. Glaciol. 2013, 59, 467–479. [Google Scholar] [CrossRef]
- Seidel, F.C.; Rittger, K.; Skiles, S.M.; Molotch, N.P.; Painter, T.H. Case study of spatial and temporal variability of snow cover, grain size, albedo and radiative forcing in the Sierra Nevada and Rocky Mountain snowpack derived from imaging spectroscopy. Cryosphere 2016, 10, 1229–1244. [Google Scholar] [CrossRef]
- Hannula, H.-R.; Pulliainen, J. Spectral reflectance behavior of different boreal snow types. J. Glaciol. 2019, 65, 926–939. [Google Scholar] [CrossRef]
- Eppanapelli, L.K.; Lintzén, N.; Casselgren, J.; Wåhlin, J. Estimation of liquid water content of snow surface by spectral reflectance. J. Cold Reg. Eng. 2018, 32, 05018001. [Google Scholar] [CrossRef]
- Peltoniemi, J.I.; Kaasalainen, S.; Naranen, J.; Matikainen, L.; Piironen, J. Measurement of directional and spectral signatures of light reflectance by snow. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2294–2304. [Google Scholar] [CrossRef]
- Negi, H.S.; Singh, S.K.; Kulkarni, A.V.; Semwal, B.S. Field-based spectral reflectance measurements of seasonal snow cover in the Indian Himalaya. Int. J. Remote Sens. 2010, 31, 2393–2417. [Google Scholar] [CrossRef]
- Kulkarni, A.V.; Srinivasulu, J.; Manjul, S.S.; Mathur, P. Field based spectral reflectance studies to develop NDSI method for snow cover monitoring. J. Indian Soc. Remote Sens. 2002, 30, 73–80. [Google Scholar] [CrossRef]
- LeddarTech Inc. Leddar™ Sensor Module User Guide; LeddarTech Inc.: Quebec, QC, Canada, 2018; p. 13. [Google Scholar]
- Kipp, S.; Mistele, B.; Schmidhalter, U. The performance of active spectral reflectance sensors as influenced by measuring distance, device temperature and light intensity. Comput. Electron. Agric. 2014, 100, 24–33. [Google Scholar] [CrossRef]
- Bullough, J. LED Lighting Systems, in National Lighting Product Information Program’s (NLPIP’s); Lighting Research Center: Troy, NY, USA, 2003; p. 47. [Google Scholar]
- Olivier, P. Leddar Optical Time-of-Flight Sensing Technology: A New Approach to Detection and Ranging; LeddarTech Inc.: Quebec, QC, Canada, 2016; p. 13. [Google Scholar]
- Messiaen, P. LeddarTech IS16 [case #1499]; Barnes, C., Ed.; LeddarTech Inc.: Quebec, QC, Canada, 2019. [Google Scholar]
- Campbell Scientific (Canada) Corp. SR50A and SR50AT Sonic Ranging Sensors; Campbell Scientific (Canada) Corp.: Edmonton, AB, Canada, 2016; p. 64. [Google Scholar]
- Xi, Z.; Hopkinson, C.; Rood, S.B.; Barnes, C.; Xu, F.; Pearce, D.; Jones, E. A lightweight leddar optical fusion scanning system (FSS) for canopy foliage monitoring. Sensors 2019, 19, 3943. [Google Scholar] [CrossRef] [PubMed]
- Xi, Z. Rasbian Leddar Detection Sampling Computer Program; University of Lethbridge: Lethbridge, AB, Canada, 2017. [Google Scholar]
- Baltsavias, E.P. Airborne laser scanning: Basic relations and formulas. ISPRS J. Photogramm. Remote Sens. 1999, 54, 199–214. [Google Scholar] [CrossRef]
- Binder, T.; Kostina, E. Gauss–newton methods for robust parameter estimation. In Model Based Parameter Estimation; Springer: Berlin, Germany, 2013; pp. 55–87. [Google Scholar]
- Earle, M.; Reverdin, A.; Wolff, M.; Smith, C.; Morin, S.; Rodica, N. Data processing and quality control methodology for the derivation of reference datasets. In Project Team and (Reduced) International Organizing Committee for the WMO Solid Precipitation Intercomparison Experiment Final Report; World Meteorological Organization: Sodankylä, Finland, 2014; p. 77. [Google Scholar]
- Kochendorfer, J.; Nitu, R.; Wolff, M.; Mekis, E.; Rasmussen, R.; Baker, B.; Earle, M.E.; Reverdin, A.; Wong, K.; Smith, C.D.; et al. Testing and development of transfer functions for weighing precipitation gauges in WMO-SPICE. Hydrol. Earth Syst. Sci. 2018, 22, 1437–1452. [Google Scholar] [CrossRef]
- Leeper, R.D.; Palecki, M.A.; Davis, E. Methods to calculate precipitation from weighing-bucket gauges with redundant depth measurements. J. Atmos. Ocean. Technol. 2015, 32, 1179–1190. [Google Scholar] [CrossRef]
- Pan, X.; Yang, D.; Li, Y.; Barr, A.; Helgason, W.; Hayashi, M.; Marsh, P.; Pomeroy, J.; Janowicz, R.J. Bias corrections of precipitation measurements across experimental sites in different ecoclimatic regions of western Canada. Cryosphere 2016, 10, 2347–2360. [Google Scholar] [CrossRef]
- Campbell Scientific (Canada) Corp. CNR1 Net Radiometer; Campbell Scientific (Canada) Corp.: Edmonton, AB, Candada, 2015; p. 32. [Google Scholar]
- Mannstein, H. The interpretation of albedo measurements on a snowcovered slope. Arch. Meteorol. Geophys. Bioclimatol. Ser. B 1985, 36, 73–81. [Google Scholar] [CrossRef]
- Okhrimenko, M.; Coburn, C.; Hopkinson, C. Multi-spectral lidar: Radiometric calibration, canopy spectral reflectance, and vegetation vertical SVI profiles. Remote Sens. 2019, 11, 1556. [Google Scholar] [CrossRef]
- Grams, G.W.; Blifford, I.H., Jr.; Schuster, B.G.; DeLuisi, J.S. Complex index of refraction of airborne fly ash determined by laser radar and collection of particles at 13 km. J. Atmos. Sci. 1972, 29, 900–905. [Google Scholar] [CrossRef][Green Version]
- Huang, B.-J.; Tang, C.-W.; Wu, M.-S. System dynamics model of high-power LED luminaire. Appl. Therm. Eng. 2009, 29, 609–616. [Google Scholar] [CrossRef]
- Dozier, J.; Green, R.O.; Nolin, A.W.; Painter, T.H. Interpretation of snow properties from imaging spectrometry. Remote Sens. Environ. 2009, 113, S25–S37. [Google Scholar] [CrossRef]
- Dozier, J.; Painter, T.H. Multispectral and hyperspectral remote sensing of alpine snow properties. Annu. Rev. Earth Planet. Sci. 2004, 32, 465–494. [Google Scholar] [CrossRef]
- Dozier, J.; Davis, R.E.; Chang, A.T.C.; Brown, K. The spectral bidirectional reflectance of snow. Spectr. Signat. Objects Remote Sens. 1988, 287, 87. [Google Scholar]
- Kaasalainen, S.; Kaasalainen, M.; Mielonen, T.; Suomalainen, J.; Peltoniemi, J.I.; Näränen, J. Optical properties of snow in backscatter. J. Glaciol. 2006, 52, 574–584. [Google Scholar] [CrossRef]
- Kashani, A.; Olsen, M.J.; Parrish, C.E.; Wilson, N. A review of LIDAR radiometric processing: From Ad Hoc intensity correction to rigorous radiometric calibration. Sensors 2015, 15, 28099–28128. [Google Scholar] [CrossRef] [PubMed]
- Parsons, N.R.; Hopkinson, C. The Development of an In-situ Light Emitting Diode Detection And Ranging Technology for Monitoring Snow Depth and Snow Surface Topography. In Proceedings of the 73rd Eastern Snow Conference, Columbus, OH, USA, 14–16 June 2016; pp. 66–76. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Leddar IS16 | SR50A Sonic Ranging Device |
|---|---|---|
| Type | Leddar LED Multichannel LIDAR sensor, built-in processing chip performing proprietary temperature adjusted Full-Waveform analysis for multi-object detection distance measurement | SR50AA Sonic Ranging Sensor with independent temperature compensation |
| Manufacturer | LeddarTech Inc. | Campbell Scientific (Canada) Corp. |
| Distance | 0 to 50 m | 0.5 to 10 m |
| Operating Temp | −40 °C to +50 °C | −45 °C to +50 °C |
| Accuracy | ±50 mm Quoted for a moving target | ±10 mm or 0.4% of DDT (greater value) |
| Precision | 6 mm (manufacturer specification if intensity > 15) | |
| Resolution | 10 mm | 0.25 mm |
| Measurement Rate | Up to 50 Hz | Less than 1.0 second |
| Emitter | Single LED diffused light source beam | Sonic Ranging ultrasonic pulses |
| Receiver | Measurement of backscatter on a 16-Channel photodetector array | Listening for return echoes |
| Beam Length | 48° (Distance from sensor * 0.8905) | 30° (Radius = 0.268 * Height) |
| Segment Length | 1/16 of the Beam Length (Beam Length / 16) | N/A |
| Beam Depth | 8° (Distance from sensor * 0.1402) | N/A |
| Wavelength | 940 nm (infrared) | 50 kHz (Ultrasonic) electrostatic transducer |
| Parameter | Configuration | Description |
|---|---|---|
| Distance Units | cm | Unit of measurement for distance to target |
| Accumulations | 1024 | Range: 0 to 1024. Higher values enhance the range for DTT below 10 m, reduce the measurement rate and noise |
| Measurement Rate | 1.5625 Hz | Range: 1.5625 to 50 Hz. Rate of signal measurement. Lower values give highest accuracy and precision (also known as Refresh Rate) |
| Oversampling | 8 | Range: 1–8. High values reduce measurement rate and increase accuracy |
| Point Count | 12 | The number of base sample points |
| Threshold Offset | 0.00 | Range: −5% to 100%. Modifies intensity threshold. At 100%, no detections. Negative values increase likelihood of false measurements. |
| LED Control | Automatic | LED power level setting |
| Change Delay | 1 (640 ms) | Number of measurements before sensor changes LED power level |
| Object Demerging | Enabled | Indicates detection of multiple objects in return signal |
| Crosstalk Removal | Enabled | Degradation compensation from object detections in other segments |
| Useful Range | 21.3 m | Leddar sensor computed value based on configuration settings |
| SEG | Proportion of Clean Returns | Proportion of Noisy Returns | Proportion of Timestep Observations with no Clean Returns | Intensity | |||
|---|---|---|---|---|---|---|---|
| Min | Max | Mean | Range | ||||
| 1 | 99.2% | 0.8% | 0.0% | 10.0 | 45.2 | 29.3 | 35.2 |
| 2 | 99.7% | 0.3% | 0.0% | 13.7 | 61.6 | 40.8 | 47.9 |
| 3 | 97.5% | 2.5% | 0.0% | 18.6 | 82.0 | 55.0 | 63.4 |
| 4 | 96.4% | 3.6% | 0.1% | 24.8 | 105.1 | 70.9 | 80.3 |
| 5 | 94.6% | 5.4% | 0.1% | 26.0 | 123.2 | 83.4 | 97.2 |
| 6 | 91.1% | 8.9% | 2.1% | 30.3 | 128.0 | 87.8 | 97.6 |
| 7 | 88.9% | 11.1% | 2.2% | 32.1 | 134.0 | 92.6 | 101.9 |
| 8 | 84.9% | 15.1% | 5.6% | 31.6 | 131.7 | 92.7 | 100.1 |
| 9 | 81.7% | 18.3% | 5.5% | 31.3 | 134.5 | 94.8 | 103.1 |
| 10 | 33.4% | 66.6% | 38.5% | 29.2 | 135.3 | 105.1 | 106.1 |
| 11 | 87.5% | 12.5% | 1.2% | 29.3 | 136.1 | 94.3 | 106.8 |
| 12 | 84.8% | 15.2% | 5.9% | 24.6 | 118.8 | 83.9 | 94.2 |
| 13 | 88.4% | 11.6% | 0.3% | 20.4 | 96.1 | 66.3 | 75.7 |
| 14 | 97.0% | 3.0% | 0.0% | 17.6 | 75.6 | 51.9 | 58.0 |
| 15 | 98.5% | 1.5% | 0.4% | 12.9 | 57.8 | 39.7 | 44.8 |
| 16 | 96.9% | 3.1% | 1.4% | 7.7 | 38.3 | 26.0 | 30.6 |
| (a) | (b) | (c) | |||||
| Daily Albedo | Air Temperature | Leddar VT | Leddar Intensity | |
|---|---|---|---|---|
| r | r | r | r | |
| Leddar Intensity | 0.77 | −0.77 | −0.43 | - |
| Leddar % Clean | 0.59 | −0.57 | −0.13 | 0.74 |
| SR50A | Leddar Segment (m) | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (m) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 0.83 | 0.81 | 0.79 | 0.80 | 0.77 | 0.75 | 0.75 | 0.75 | 0.76 | 0.77 | 0.75 | 0.78 | 0.78 | 0.81 | 0.85 | 0.85 | 0.85 |
| Site Visit Date | 21-Dec | 05-Jan | 20-Jan | 21-Feb | 04-Mar | 09-Apr | 15-Apr | 19-Apr | 26-Apr | 27-Apr | 27-Apr |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Start Time | 18:30 | 11:00 | 15:00 | 10:45 | 14:45 | 14:00 | 14:00 | 18:15 | 06:00 | 07:00 | 11:15 |
| End Time | 22:30 | 15:00 | 19:00 | 14:45 | 18:45 | 18:00 | 18:00 | 21:45 | 10:00 | 11:00 | 12:30 |
| Snow Depth (m) | |||||||||||
| Manual Field Sample | 0.35 | 0.40 | 0.36 | 0.70 | 0.74 | 0.77 | 0.53 | 0.58 | 0.28 | 0.20 | 0.17 |
| SR50A Mean | 0.31 | 0.44 | 0.36 | 0.66 | 0.72 | 0.71 | 0.59 | 0.57 | 0.29 | 0.21 | 0.17 |
| SR50A Min | 0.29 | 0.42 | 0.35 | 0.65 | 0.72 | 0.70 | 0.59 | 0.56 | 0.28 | 0.20 | 0.06 |
| SR50A Max | 0.31 | 0.45 | 0.36 | 0.69 | 0.72 | 0.73 | 0.60 | 0.58 | 0.29 | 0.22 | 0.20 |
| Leddar Mean | 0.28 | 0.36 | 0.31 | 0.61 | 0.66 | 0.65 | 0.54 | 0.53 | 0.23 | 0.14 | 0.12 |
| Leddar Min | 0.24 | 0.32 | 0.27 | 0.54 | 0.61 | 0.59 | 0.48 | 0.46 | 0.16 | 0.08 | 0.06 |
| Leddar Max | 0.38 | 0.40 | 0.37 | 0.70 | 0.74 | 0.75 | 0.62 | 0.61 | 0.32 | 0.24 | 0.21 |
| Proportion clean returns | 92% | 83% | 81% | 93% | 93% | 59% | 47% | 49% | 79% | 63% | 28% |
| Air Temperature (°C) | −6.2 | 3.2 | −0.3 | −13.4 | −7.4 | 7.4 | 7.5 | 5.0 | 4.8 | 5.1 | 16.8 |
| Daily Albedo | 0.84 | 0.83 | 0.80 | 0.81 | 0.85 | 0.77 | 0.69 | 0.73 | 0.59 | 0.58 | 0.58 |
| Leddar | Snow Depth (m) | ||||
|---|---|---|---|---|---|
| Segment | Mean | STDev | Min | Max | Range |
| 1 | 0.191 | 0.001 | 0.190 | 0.194 | 0.004 |
| 2 | 0.181 | 0.001 | 0.180 | 0.183 | 0.003 |
| 3 | 0.189 | 0.001 | 0.188 | 0.190 | 0.002 |
| 4 | 0.179 | 0.001 | 0.178 | 0.181 | 0.003 |
| 5 | 0.157 | 0.001 | 0.156 | 0.158 | 0.002 |
| 6 | 0.162 | 0.001 | 0.161 | 0.164 | 0.003 |
| 7 | 0.161 | 0.001 | 0.160 | 0.163 | 0.003 |
| 8 | 0.174 | 0.001 | 0.173 | 0.176 | 0.003 |
| 9 | 0.179 | 0.001 | 0.178 | 0.182 | 0.003 |
| 10 | 0.169 | 0.001 | 0.168 | 0.172 | 0.003 |
| 11 | 0.173 | 0.001 | 0.172 | 0.175 | 0.003 |
| 12 | 0.176 | 0.001 | 0.175 | 0.178 | 0.003 |
| 13 | 0.191 | 0.001 | 0.189 | 0.193 | 0.003 |
| 14 | 0.212 | 0.001 | 0.211 | 0.215 | 0.004 |
| 15 | 0.197 | 0.002 | 0.195 | 0.200 | 0.005 |
| 16 | 0.211 | 0.001 | 0.210 | 0.214 | 0.004 |
| SR50A (m) | 0.174 | 0.008 | 0.164 | 0.185 | 0.021 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barnes, C.; Hopkinson, C.; Porter, T.; Xi, Z. In-Situ LED-Based Observation of Snow Surface and Depth Transects. Sensors 2020, 20, 2292. https://doi.org/10.3390/s20082292
Barnes C, Hopkinson C, Porter T, Xi Z. In-Situ LED-Based Observation of Snow Surface and Depth Transects. Sensors. 2020; 20(8):2292. https://doi.org/10.3390/s20082292
Chicago/Turabian StyleBarnes, Celeste, Chris Hopkinson, Thomas Porter, and Zhouxin Xi. 2020. "In-Situ LED-Based Observation of Snow Surface and Depth Transects" Sensors 20, no. 8: 2292. https://doi.org/10.3390/s20082292
APA StyleBarnes, C., Hopkinson, C., Porter, T., & Xi, Z. (2020). In-Situ LED-Based Observation of Snow Surface and Depth Transects. Sensors, 20(8), 2292. https://doi.org/10.3390/s20082292