1. Introduction
With the development of positioning technology, massive GPS trajectory data has been continuously generated from vehicles such as cars, taxis and buses. A GPS trajectory is a sequence of GPS points which records the spatial track of a moving object. As a GPS trajectory can deviate from its actual location in the road network, caused by device malfunction, urban canyons and other positioning errors, many map matching methods have been proposed to locate GPS trajectories onto road networks. The core problem of map matching is the uncertainty issue of GPS trajectories, including the uncertain path between consecutive GPS points, and this problem becomes more severe for low-sampling-rate GPS trajectories.
At present, GPS trajectories with low sampling rates (the time interval between consecutive GPS readings exceeds 1 min) are collected for many applications as this can conserve battery life and help track vehicles for a long period. The current map matching algorithms are developed to determine the correct path of low-sampling-rate GPS trajectories, based on various features, such as spatial [
1,
2], temporal [
2], speed constraint [
3,
4] and turning information [
5]. However, these algorithms do not perform well when sampling rates are very low, i.e., the sampling rate exceeds three or four minutes, especially in a dense road network. Spatial features (e.g., distance similarity) and temporal features (e.g., speed similarity) [
2,
6] are sometimes ineffective in identifying the correct path between consecutive GPS points, when they are far from each other.
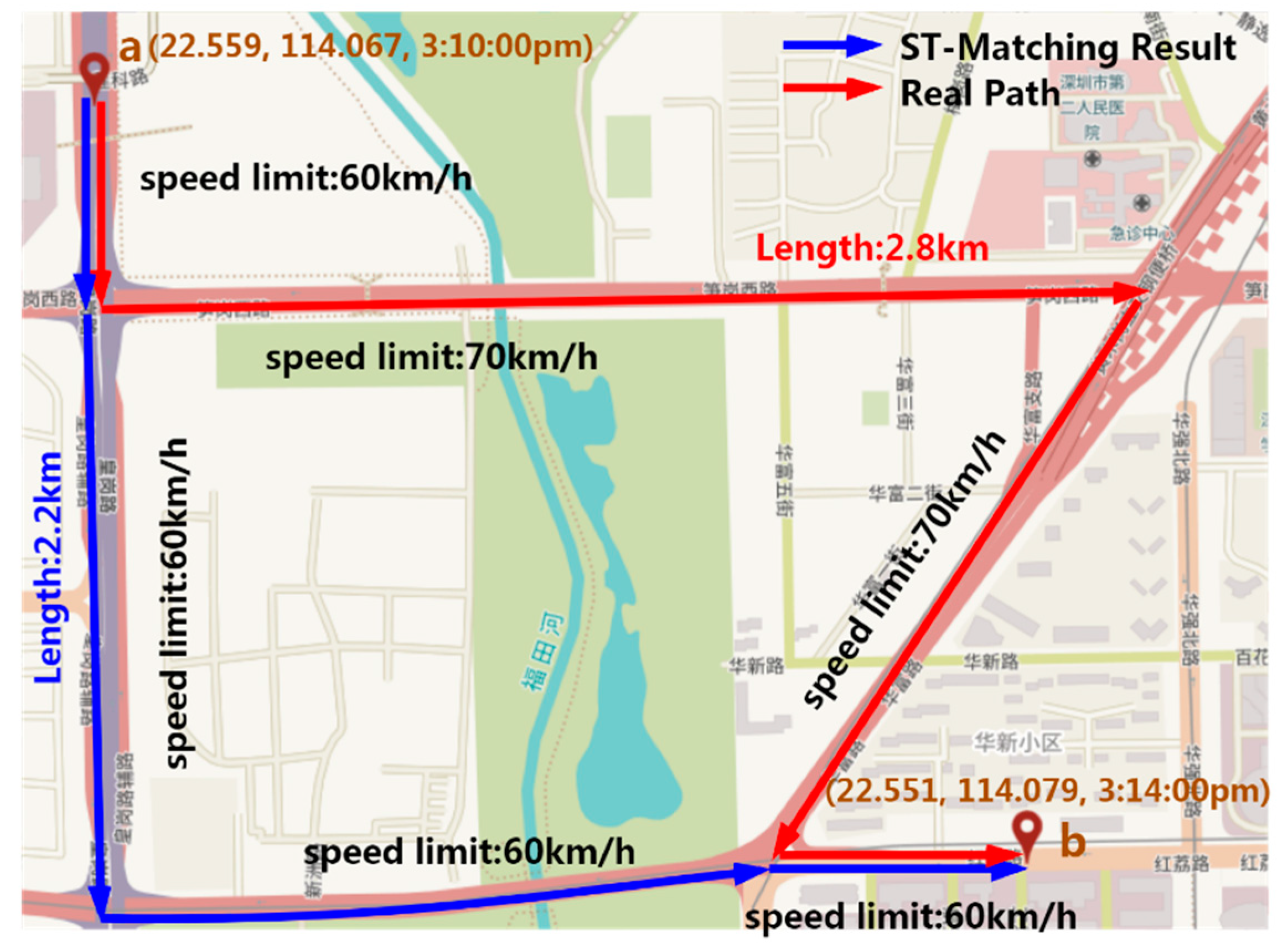
Figure 1 shows an example of the map matching process based on spatial and temporal features. In the figure, point
a (22.559° N, 114.067° E, 3:10:00 p.m.) and point
b (22.551° N, 114.079° E, 3:14:00 p.m.) are two consecutive GPS points of a low-sampling-rate trajectory. Two candidate paths (shown in blue and red) are identified with the lengths of 2.2 km and 2.8 km, and the average speeds moving along the two paths between
a and
b are 33 km/h and 42 km/h, respectively. As shown in the figure, the speed limits of road segments on the blue path are (60 km/h, 60 km/h, 60 km/h and 60 km/h), and on the red path are (60 km/h, 70 km/h, 70 km/h and 60 km/h). According to the spatial and temporal similarities of the ST-Matching algorithm [
2], the blue path is more likely to be the map matching result than the red path, since the length of the blue path is shorter than that of the red path. Additionally, the cosine similarity value between average speed and the speed limits of road segments on the blue path is larger than the cosine similarity value on the red path. However, the red path is the actual path taken by the user. The example shows that using only spatial and temporal features sometimes does not effectively reduce the large uncertainty and distinguish the correct path for GPS trajectories with very low sampling rates.
Other methods attempt to reduce the uncertainty of low-sampling-rate GPS trajectories with the addition of historical high-sampling-rate GPS trajectories. For instance, historical high-sampling-rate GPS trajectories are used to detect frequent path patterns, and the path of a low-sampling-rate GPS trajectory is estimated based on the discovered patterns [
7,
8]. However, historical high-sampling-rate GPS trajectories are not always available. Furthermore, the quality of these map matching methods heavily relies on the effectiveness of the discovered patterns. With rapid road development or traffic control, the frequent path patterns, discovered from historical GPS trajectory data, may not be applicable for the current situation. Therefore, creating effective map matching for low-sampling-rate GPS trajectories without auxiliary data continues to be a challenging problem.
This paper intends to solve the uncertainty issue of low-sampling-rate GPS trajectories through trajectory collaboration. Similar low-sampling-rate GPS trajectories are aggregated into clusters, and a collaborative GPS trajectory is then generated for map matching from each cluster with information supplementation. However, this method presents several challenges.
First, an effective clustering algorithm for low-sampling-rate GPS trajectories is significant. There are many methods of trajectory clustering, such as the partition and group method [
9], trajectory clustering with Fréchet distance [
10] and clustering algorithm for network constraint trajectories (NETSCAN) [
11]. These algorithms are designed for different applications. For example, the clustering algorithm in [
9] is designed for flock or typhoon trajectories, but does not consider road constraint in map matching. The clustering algorithms in [
10,
11] consider road constraint and calculate the geometric similarity between GPS points, but they are not applicable for low-sampling-rate trajectories. The reason for this is that the distance between consecutive GPS points is large (maybe larger than 500 m) in low-sampling-rate GPS trajectories, so that the geometric similarity between trajectories would be small, even on the same path. Exploring an effective method of clustering low-sampling-rate GPS trajectories is worth studying.
Second, extracting useful information from a group of similar GPS trajectories to reduce the path uncertainty issue is required. After trajectory clustering, low-sampling-rate GPS trajectories in each cluster are still separated from each other and are not collaborated for map matching. An issue remains understanding how to use a group of similar GPS trajectories to reduce uncertainty by trajectory collaboration and further benefit map matching.
In this paper, a collaborative map matching algorithm called CMM is proposed to address low-sampling-rate GPS trajectories. CMM processes a group of similar GPS trajectories together, rather than as individual trajectories, which makes map matching more efficient. In the preprocessing step, CMM removes outliers from low-sampling-rate GPS trajectories. Spatial indices, including an R-tree and a Path-Forest, are built to facilitate candidate path search. Then, a DBSCAN (Density-Based Spatial Clustering of Applications with Noise) algorithm is extended to cluster GPS trajectories into different groups, based on path similarity instead of geometric similarity. Path similarity is designed for similarity measurement between low-sampling-rate GPS trajectories by comparing their candidate paths. Next, a resampling method is applied to generate a new collaborative GPS trajectory from each trajectory cluster. Finally, the generated collaborative GPS trajectory is matched to the path candidate with the highest LCSS (Longest Common Subsequence) similarity.
The specific contributions of this research are highlighted below:
This paper proposes a collaborative map matching algorithm called CMM to address low-sampling-rate GPS trajectories based on trajectory clustering and resampling. CMM does not rely on any additional information, such as historical high-sampling-rate GPS trajectories or traffic flow information.
DBSCAN clustering algorithm is extended to aggregate similar low-sampling-rate GPS trajectories together, based on path similarity, which can effectively decrease the negative impact of geometric similarity on clustering of low-sampling-rate GPS trajectories.
A resampling method, based on a sliding window, is proposed to generate a new collaborative GPS trajectory from each trajectory cluster. The generated collaborative GPS trajectory integrates the collective information of similar low-sampling-rate GPS trajectories.
Experiments have been conducted based on a simulated GPS trajectory dataset, and the results show that the proposed CMM algorithm outperforms the baseline methods in both, effectiveness and efficiency.
This paper is organized as follows:
Section 2 introduces related works on map matching.
Section 3 provides a detailed discussion on the proposed CMM algorithm.
Section 4 discusses experiments based on both a real and a simulated GPS trajectory dataset.
Section 5 presents the conclusions and discusses future works resulting from this research.
3. Methodology
3.1. Preliminaries
● Definition 1. Road network.
A road network is a directed graph, , where is a set of vertices representing the terminal points of road segments, and is a set of directed edges representing the road segments. Vertex is a terminal point of road segments. Edge is a road segment with a starting point and an end point , where and .
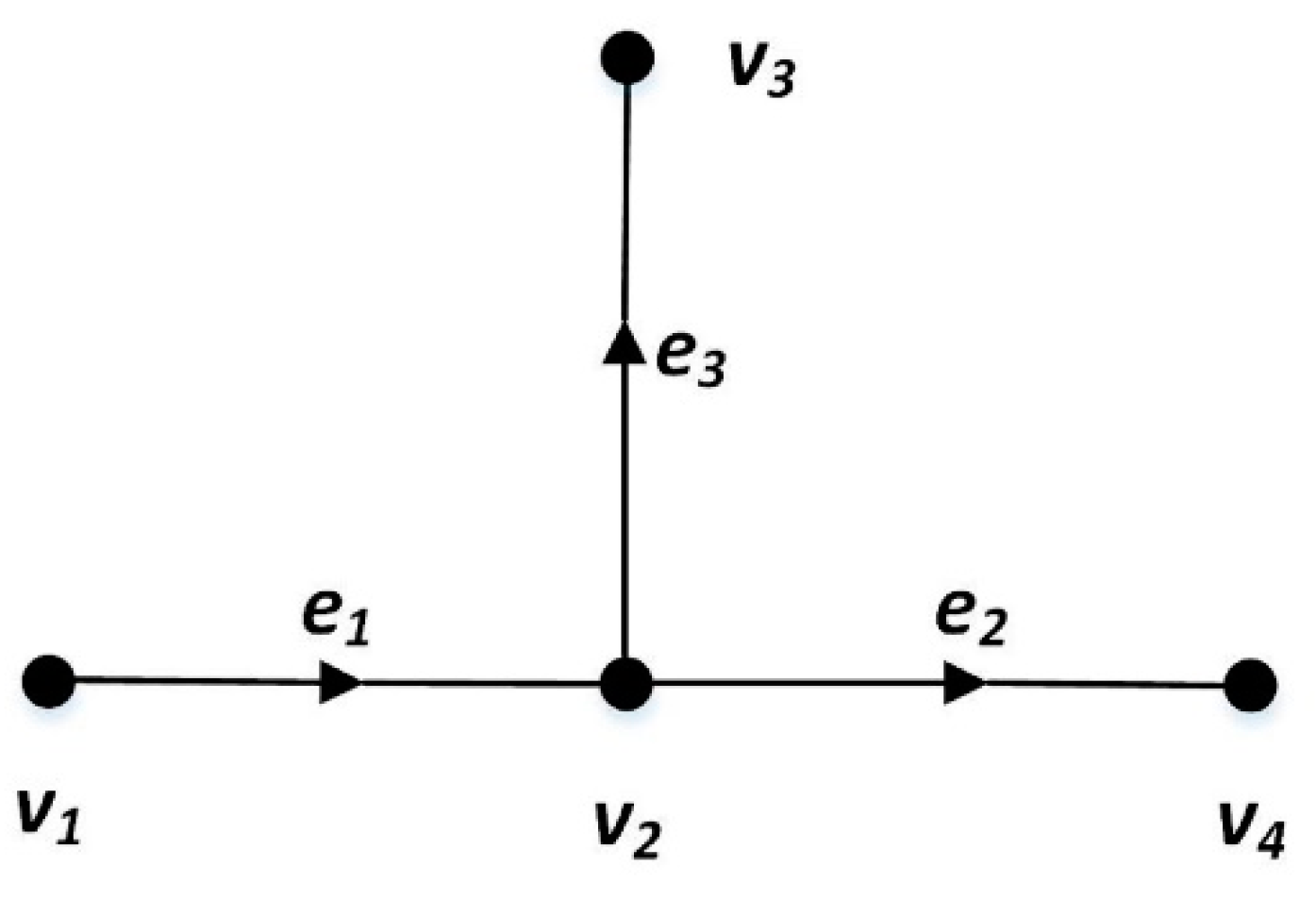
● Definition 2. Path.
A path is a sequence of consecutive road segments, denoted as , where is a road segment with speed constraint and . The first and last vertex of is denoted as and , and and .
Figure 2 gives an example of two
. In
Figure 2, two
,
and
, can be constructed by three road segments
and
. To be more specific,
, and
. In
Figure 2,
and
.
● Definition 3. GPS point.
A GPS point is a 4-tuple denoted as: where is the timestamp of the GPS point, and , and are the latitude, longitude and direction of the location of the GPS point at time .
● Definition 4. GPS trajectory.
A GPS trajectory is a sequence of GPS points where, .
The map matching problem can be represented as follows: given a set of low-sampling-rate GPS trajectories, , for each GPS trajectory , this paper aims to locate onto the road network so that the path of can be obtained.
3.2. Overview of Collaborative Map Matching
In this paper, a collaborative map matching (CMM) algorithm is proposed to handle low-sampling-rate GPS trajectories.
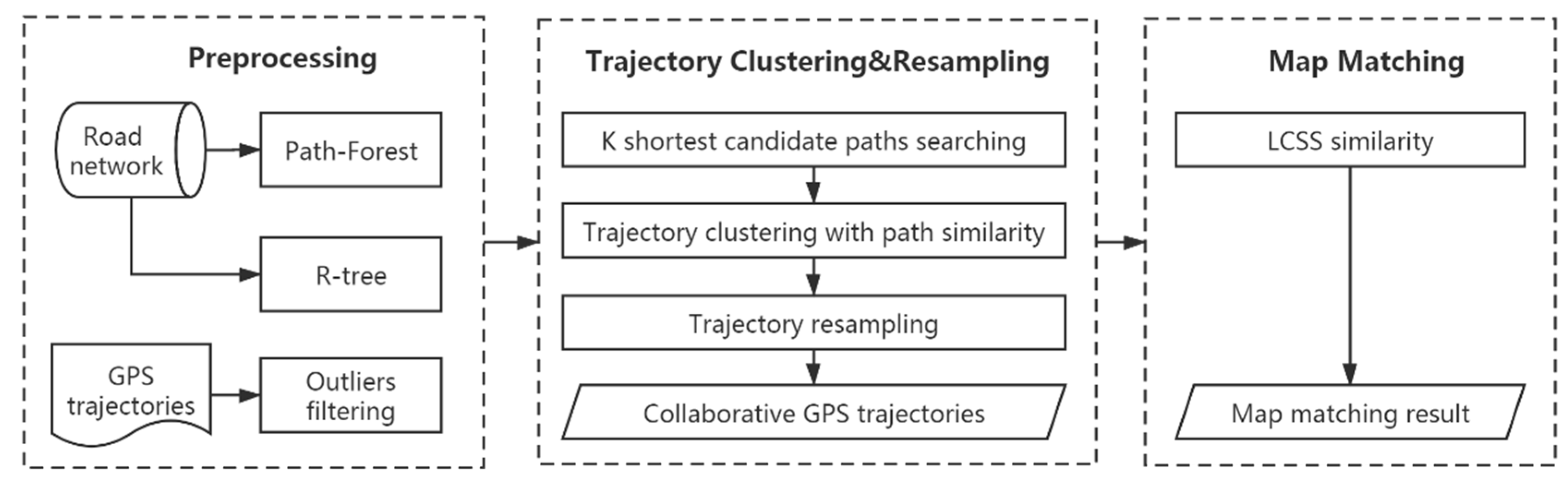
Figure 3 shows the framework of the CMM algorithm, which can be divided into three steps. The first is data preprocessing, where outliers are removed from GPS trajectories. To speed up the query operations on road segments and paths, an R-tree spatial index is built for road segment query, and a Path-Forest index is built to store paths in the road network. In the second step,
shortest distance paths [
15] are first calculated out as candidate paths for each GPS trajectory. Then, the similarity between GPS trajectories is measured based on path similarity, and the DBSCAN algorithm is extended to cluster GPS trajectories. Next, a collaborative GPS trajectory with a high sampling rate is generated by resampling of a group of similar low-sampling-rate GPS trajectories in each cluster. In the last step, the LCSS similarity between the generated collaborative GPS trajectory and its candidate paths is calculated, and the path with the largest similarity is taken as the map matching result for all trajectories in the cluster. Each step will be discussed in detail.
3.3. Preprocessing
Data preprocessing is an important part of the proposed CMM algorithm. The first task is removing the outlier. If the difference between a GPS point and its nearest road segment exceeds the corresponding thresholds (including distance and direction), the GPS point will be taken as an outlier and removed. Second, an R-tree is built on road segments to facilitate the road segment query through spatial proximity. Finally, a Path-Forest index (Path-Forest) is built to store all paths between two road segments where path length is smaller than threshold
, which could improve the efficiency of candidate route search in the road network. The Path-Forest is similar to the FP-Forest in [
8], the difference being that FP-Forest is designed to store frequent paths (sub-paths) and their frequencies and Path-Forest is utilized to store all paths between any two road edges with length under
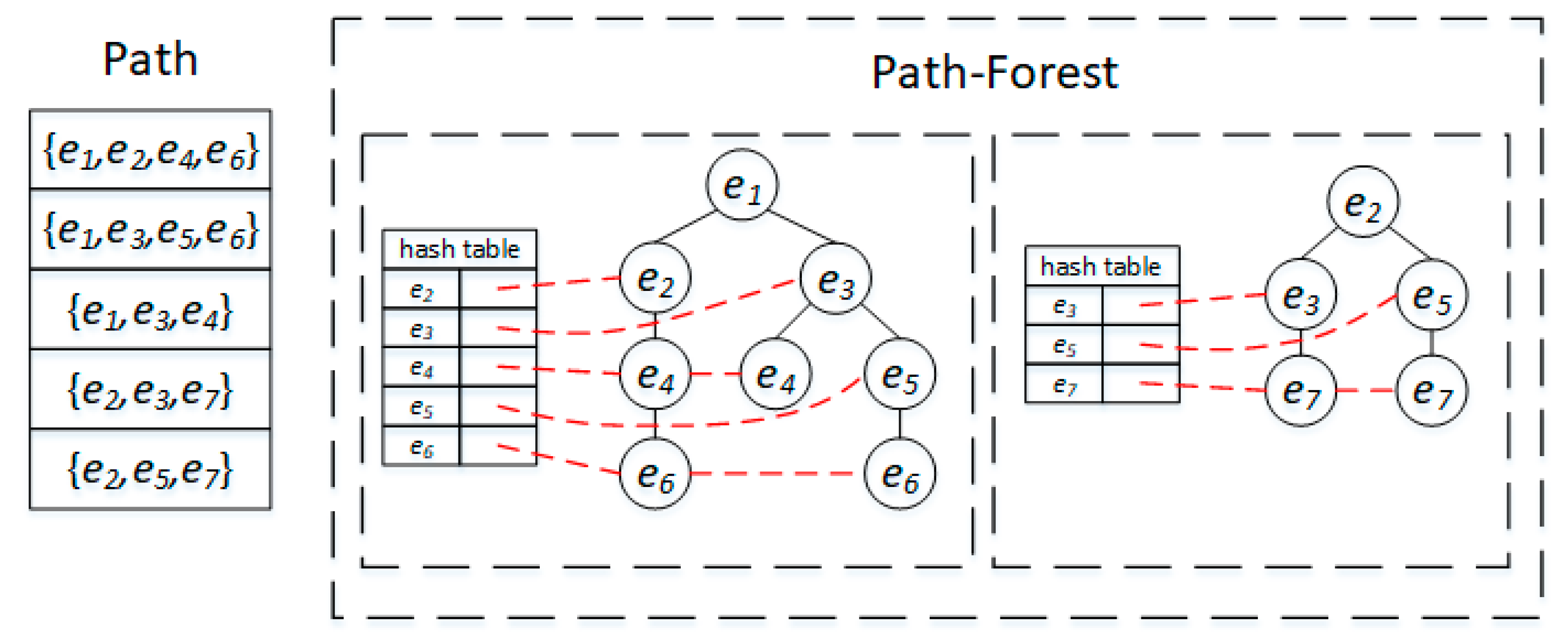
. In a Path-Forest, each road segment in the road network will be taken as the root of a tree and the paths sourcing from the road segment will be stored in the tree. Each tree is associated with a hash table, where the key is the road segment ID and the value is a list storing the sequence of the corresponding road segments in the paths.
It is efficient to retrieve all paths between two road segments in a Path-Forest.
Figure 4 shows an example of path query from road segment
to
. First, the tree with root
and its associated hash table is searched out. In the hash table, the list pointing to
will be identified. For each element in the list, the path from
to
will be obtained by tracing back, starting from
in the tree. Thus, two paths from
to
will be searched out as
and
.
3.4. Trajectory Clustering with Path Similarity
In this section, DBSCAN algorithm with path similarity is utilized for clustering low-sampling-rate GPS trajectories. The candidate paths are searched out for each low-sampling-rate GPS trajectory, and the similarity between GPS trajectories is measured based on the candidate paths.
3.4.1. Candidate Path Search
Given a search radius , the candidate road segments for each GPS point can be queried out from an R-tree, and the paths to connect the candidate road segments of consecutive GPS points can be searched out from the Path-Forest. Unreasonable candidate paths should be pruned. In this paper, the candidate path pruning is implemented, based on a heading threshold and an estimated temporal threshold, . The candidate path search with pruning method can be divided into two parts: candidate road segment query for each GPS point and path search in the Path-Forest with speed constraint.
Candidate Road Segment Query. When querying the surrounding road segments of a GPS point with radius, (set as 100 m) in the R-tree, if the heading difference between a candidate road segment and the direction of the GPS point exceeds threshold (set as 60°), the road segment will be dismissed from the query. Thus, candidate road segments with a similar direction for the GPS points could be searched.
Path Search. A complete candidate path of a GPS trajectory connects the candidate road segments from the first GPS point to the last GPS point, so it must search paths by connecting the candidate road segments of consecutive GPS points. However, the number of candidate paths for a GPS trajectory would be substantial in a road network. Thus, time constraint
is calculated and used to filter out unreasonable paths and facilitate path search,
where
is the calculated time threshold from GPS point
to the next point
, and
is a road segment on the candidate path from
to
. Additionally,
is the maximum speed allowed on
. Hence, threshold
stands for the minimum time required to travel from
to
. If the time interval
between
and
in Equation (2) is smaller than threshold
, the path is considered unreasonable and is pruned.
Given a GPS trajectory , the pseudo-code of CPS is shown in Algorithm 1. The algorithm can be divided into two parts. The first part is candidate road segment query with radius for each GPS point in lines 1–3. The set is the set of candidate road segments of the GPS point in GPS trajectory . The second part is path search by connecting candidate road segments in lines 4–15. is the set of candidate road segment sequences for . As the algorithm starts from the candidate road segments of the first GPS point, in line 4, each candidate road segment in is taken as a and added into . From lines 5–15, the algorithm utilizes the Path-Forest to search candidate paths from to , removing unreasonable paths through pruning and adding them into the candidate path set . Last, the previous candidate paths in are connected to the current paths in , and is updated with the result of connection.
| Algorithm 1: Candidate Path Search (CPS) |
Input: GPS trajectory ; the set of edges in road network ; search radius ; heading change threshold ;
Output: a set of |
| 1. | for () |
| 2. | CandidateRoadSegmentQuery(,,,) |
| 3. | end for |
| 4. | |
| 5. | for () |
| 6. | ; |
| 7. | foreach ( in ) |
| 8. | foreach ( in ) |
| 9. | |
| 10. | PathForestQuery(,,); |
| 11. | ; |
| 12. | end foreach |
| 13. | end foreach |
| 14. | ; |
| 15. | end for |
3.4.2. Trajectory Clustering
In order to supplement the missing information of low-sampling-rate GPS trajectories, similar GPS trajectories are clustered together. In this paper, the DBSCAN clustering method is extended for low-sampling-rate GPS trajectory clustering, based on path similarity instead of geometric similarity, as geometric similarity does not perform well for similarity measurements between low-sampling-rate GPS trajectories. The path similarity method measures similarity between low-sampling-rate GPS trajectories by comparing their candidate paths based on the Jaccard dissimilarity index. As the number of potential candidate paths for a GPS trajectory would be overwhelming, the candidate paths with the shortest distance for each GPS trajectory are selected as candidate paths for path similarity measurement.
The Jaccard dissimilarity index
between two GPS trajectories
and
is calculated based on the ratio of candidate paths whose dissimilarity is smaller than
to the total number of path combinations between two candidate sets. The calculation of
is shown in Equation (3).
where
denotes the set of candidate paths of the GPS trajectory
,
is the intersection of the candidate path sets of two trajectories and is composed of paths whose dissimilarity is smaller than
.
is the union of the two candidate path sets and is composed of all combinations between the candidate paths of the two trajectories.
The dissimilarity between two paths
and
is defined in Equation (4).
where
is the longest common subsequence [
16] between two paths, and it calculates the number of common road segments in the two paths. For example, given two paths,
and
, the value
=
,
,
.
DBSCAN identifies clusters for spatial data based on density and requires two parameters: describing the maximum distance of a neighborhood, and describing the minimum number of points required to form a dense neighborhood. In this paper, the parameter is considered in two aspects, the maximum distance difference between endpoints of trajectories, and the maximum dissimilarity between two GPS trajectories based on path similarity. Thus, if the OD (origin-destination) pairs of GPS trajectories are distant from each other, they will be aggregated into different clusters.
The neighboring trajectories of each low-sampling-rate GPS trajectory could be obtained by Algorithm 2. As R-tree and Path-Forest have been built for GPS trajectories, it is efficient to retrieve the candidate paths around this trajectory (line 2). The dissimilarity measurement will filter out the GPS trajectories in which distance between endpoints is larger than threshold , and dissimilarity between two GPS trajectories is larger than threshold .
| Algorithm 2: Neighbor Query in DBSCAN |
Input: a set of GPS trajectory , parameters
Output: a set of |
| 1. | ; |
| 2. | rtree.query(); |
| 3. | ; |
| 4. | foreach () |
| 5. | ; |
| 6. | if ())) |
| 7. | |
| 8. | if () |
| 9. | |
| 10. | end if |
| 11. | end if |
| 12. | end foreach |
Therefore, GPS trajectories can be clustered with the DBSCAN method with path similarity. Given certain values of , , , a GPS trajectory will be considered as a core trajectory if the number of GPS trajectories in its neighborhood exceeds the parameter . Then, a cluster can be generated based on the core trajectory with the conventional DBSCAN algorithm. If a GPS trajectory can be aggregated into more than one cluster, it will be assigned to the cluster with the largest number of GPS trajectories.
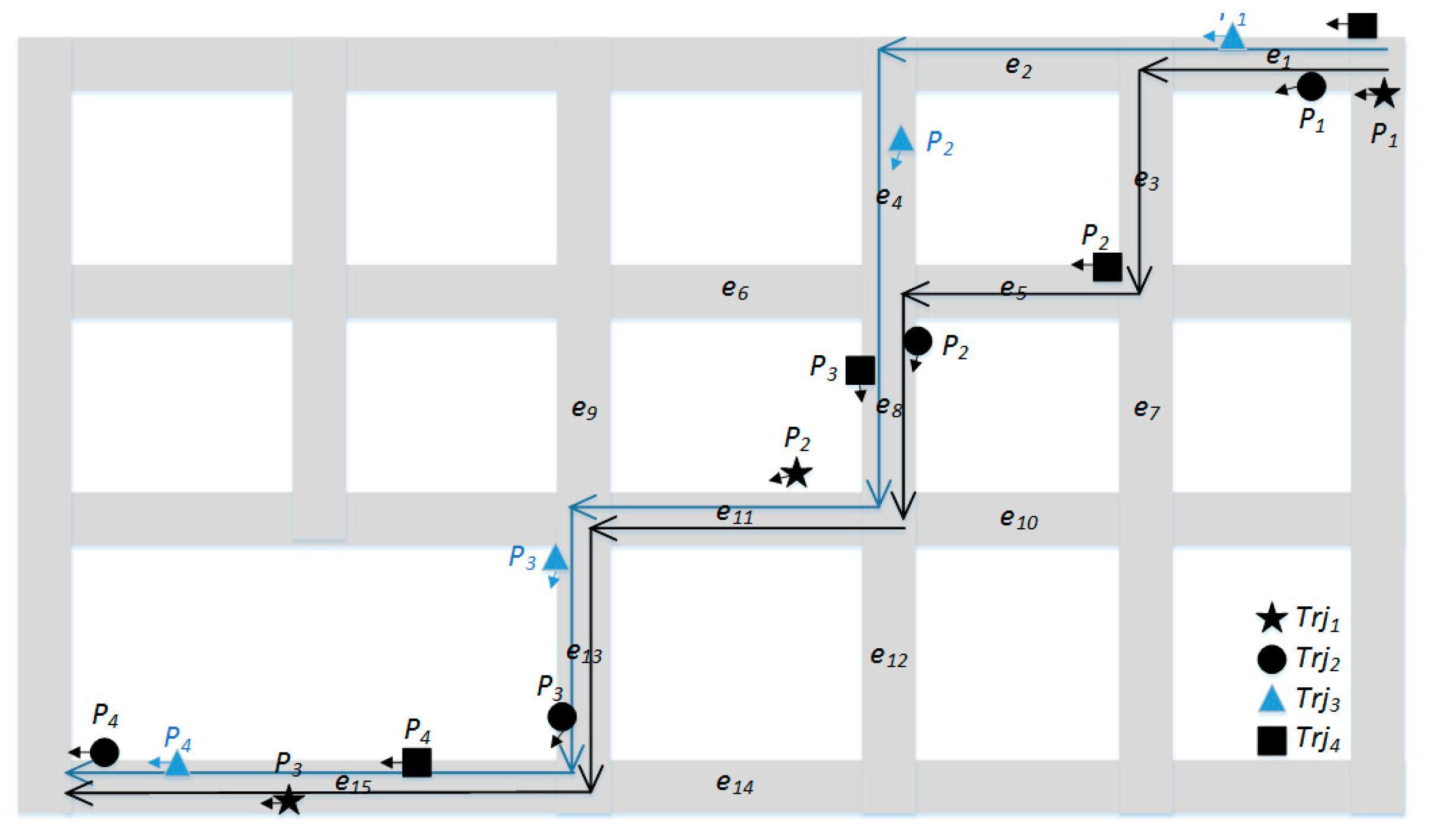
Figure 5 shows an example of trajectory clustering for four GPS trajectories (denoted in black and blue). The GPS trajectories
are moving on the same path (black arrow), and the GPS trajectory
is moving on another path (blue arrow). With
and
in the DBSCAN algorithm, the final clustering result for the four GPS trajectories is
,
.
Table 1,
Table 2 and
Table 3 show the road segment sequence of each path, the candidate paths of each GPS trajectory, and the dissimilarity between GPS trajectories in
Figure 5, respectively.
3.5. Trajectory Resampling
GPS trajectories are aggregated into several groups with the DBSCAN clustering method. However, GPS trajectories in a cluster still confront the uncertainty issue due to low sampling rates. Therefore, for each cluster, it is necessary to integrate the low-sampling-rate GPS trajectories into a collaborative GPS trajectory, so they can supplement the missing information for each other. For example, the three GPS trajectories
can supplement the missing information for each other in
Figure 5. The generated collaborative GPS trajectory should integrate spatial information of low-sampling-rate GPS trajectories in the cluster for map matching. Thus, the trajectory resampling is different from averaging trajectory segment problems, which intends to obtain a representative trajectory for maintaining shape characteristics [
17].
In this paper, a sliding window algorithm for trajectory resampling is proposed to generate collaborative GPS points from each trajectory cluster. The pseudocode of the algorithm is shown in Algorithm 3. At the beginning, the first and end points of all GPS trajectories in the cluster are collected into two sets of points, and (line 2). Then, a GPS point is randomly selected from as the seed point, denoted as (line 3). A window composed of two circles, and , centering at with radius and respectively, is generated (line 5). In the window, the GPS points inside can be retrieved quickly, and the center of the obtained GPS points is calculated as a new resampling GPS point, denoted as (line 6–7). Next, a GPS point between and is randomly selected as a new seed point, . If there is no GPS point between and , the radius is expanded to build a larger circle until a GPS point is obtained as the new seed point (line 8–9). Last, the window will slide forward until the end points in are reached, and the sequence of generated sampling points can make up a collaborative GPS trajectory from the low-sampling-rate GPS trajectories in the cluster (line 4–11).
| Algorithm 3: Sliding-Window Algorithm for Trajectory Resampling |
Input: a set of GPS trajectories , search radius
Output: a collaborative GPS trajectory |
| 1. | ; |
| 2. | , endPs Ps; |
| 3. | ; |
| 4. | while (.contains(endPs)) |
| 5. | create with radius and ; |
| 6. | rtree.query(,); |
| 7. | ; |
| 8. | rtree.query(,,); |
| 9. | ; |
| 10. | ; |
| 11. | end while |
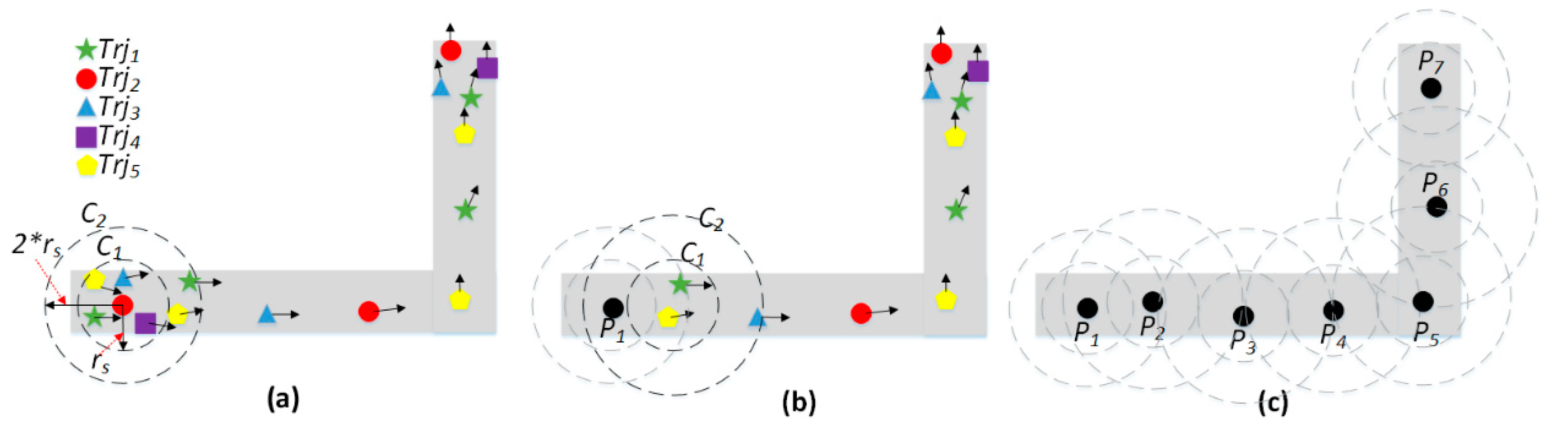
Figure 6 shows the procedure of trajectory resampling in a cluster. In this figure, five trajectories (green, red, blue, purple and yellow) are grouped into a cluster; the small black arrow is the real-time heading of a GPS point. In
Figure 6a, the red GPS point is randomly selected as the seed point, and two circles
and
are generated, centering as the seed point. In
, five GPS points are retrieved, and the center point is created as a new resampling point and denoted as
in
Figure 6b. In
Figure 6a, two GPS points exist between
and
, and the next seed point will be randomly selected from them. As the window reaches the end GPS points of the cluster, a collaborative GPS trajectory is generated and composed from
to
, as shown in
Figure 6c.
3.6. Map Matching for the Supplemented Trajectory
After trajectory resampling, a collaborative GPS trajectory is generated from each cluster, and it will be matched to one of the candidate paths. Given a GPS trajectory
and a candidate path
, LCSS [
18] is utilized to measure the similarity between trajectory and path. The path with the largest LCSS value will be taken as the map matching result for all low-sampling-rate GPS trajectories in the corresponding cluster:
is the Euclidean distance from a GPS point
to the closest point on the road segment
. If
, this GPS point
cannot be matched to this road segment
.The subsequence of a trajectory
from its first GPS point to the
-th GPS point is defined as
and the subsequence of
from the first road segment to the
-th road segment as
. The LCSS value, denoted as
, between
and
is defined as,
With Equation (6), a dynamic programming algorithm could be used to calculate the LCSS distance between and , and the candidate path with the largest LCSS value is selected as the map matching result.
5. Conclusions and Future Work
In this paper, a collaborative map matching method (CMM) was proposed for low-sampling-rate GPS trajectories. CMM first groups similar GPS trajectories into clusters based on path similarity and then supplements the missing information of GPS trajectories by resampling. A collaborative trajectory is then extracted for each cluster and is matched to the road network. Experiments were conducted in a real, and a simulated, GPS trajectory dataset. The experiment results show that the proposed CMM outperforms the baseline method in both, effectiveness and efficiency.
In CMM, the similarity measurement for low-sampling-rate GPS trajectory is considered, based on path similarity, which overcomes the deficiency of geometry similarity. A trajectory resampling algorithm is proposed to extract a high-sampling-rate GPS trajectory from each cluster of low-sampling-rate GPS trajectories, which could effectively reduce the uncertainty issue of map matching.
This work can be improved in the following ways: First, the current path similarity method only considers the number of common road segments when measuring the similarity between candidate paths. In future, more features can be involved for path similarity measurement. For instance, the average moving speed of GPS trajectories on candidate paths can be considered for path similarity measurement. Additionally, the grid-based method C-SIM was proposed and seems promising for measuring similarity between the trajectories [
14]. The method uses only the spatial aspect of routes and ignores the order of traveling, which makes it simple and fast. It converts the GPS points to cells and fills the gap between cells using linear interpolation if two consecutively generated cells are not adjacent. However, the size of the grid is crucial and should be carefully determined for low sampling trajectories. For this study, if the grid size is too large, dissimilar GPS trajectories would be aggregated into one group; if the grid size is too small, similar GPS trajectories may not be effectively clustered into one group. Therefore, how to utilize the grid-based method in map matching for a low-sampling-rate trajectory will be investigated in future. Second, for each trajectory cluster, only location information of GPS points was considered for trajectory resampling. However, the speed and heading information of new generated GPS points should be estimated after resampling, which could produce a better map matching result. The CMM method will be deployed on a distributed computing platform to handle massive low-sampling-rate GPS trajectories throughout the city.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}