Fault Detection and Exclusion Method for a Deeply Integrated BDS/INS System

Abstract
1. Introduction
2. Deeply Integrated BDS/INS System
2.1. Implementation of DI BDS/INS System
2.2. Pre-filters Based on Extended Kalman Filter (EKF)
2.3. BDS/INS Integration Kalman Filter
3. Fault Detection and Exclusion Method
4. Simulation and Results
- The receiver noise in the simulations had negligible residuals such as ephemeris errors, satellite clock errors, atmospheric delay errors, and multipath errors. IF signals were generated with standard atmospheric models.
- For INS simulation, only constant bias and random walk noise were modeled. Scale factor errors, askew installation errors, correlated bias errors, and lever arm errors were not modeled in the simulation.
- The DI system was calibrated properly and it worked steadily before the fault occurs.
4.1. Simulation Setup
4.2. Simulation Results
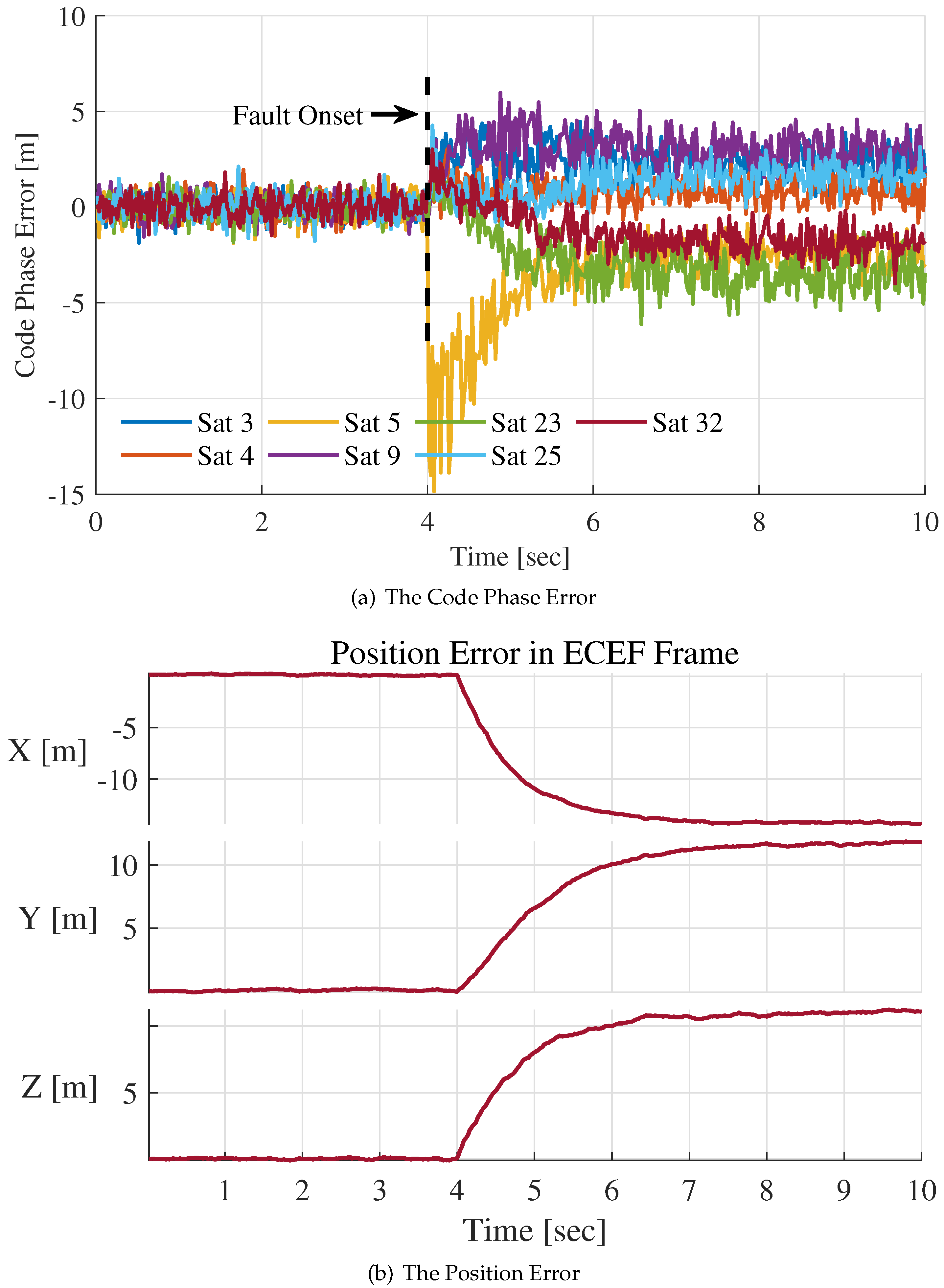
4.2.1. Step Error Simulation
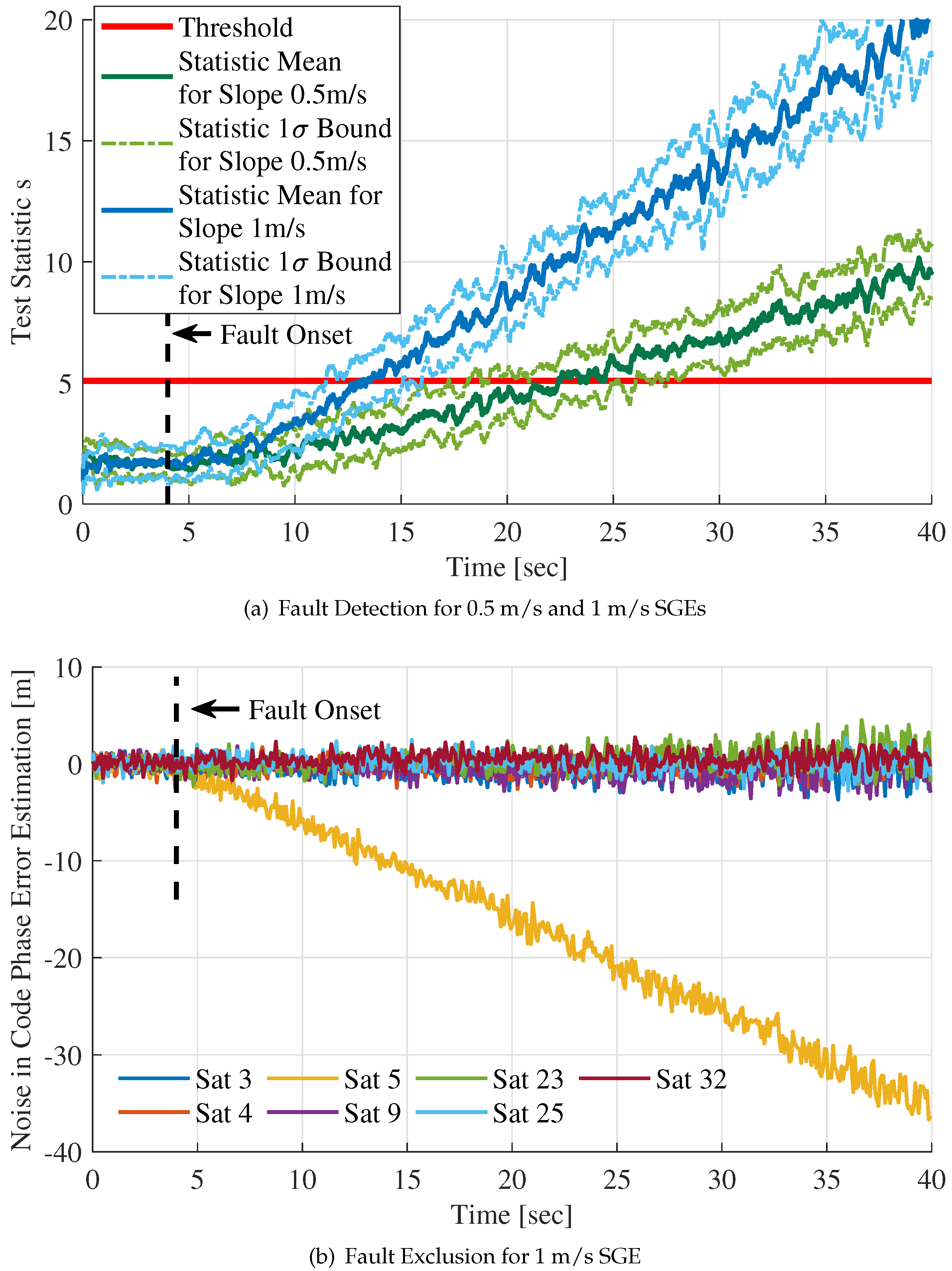
4.2.2. Slowly Growing Error Simulation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, Z.; Chen, W.; Ruan, R.; Liu, X. Evaluation of PPP-RTK based on BDS-3/BDS-2/GPS observations: a case study in Europe. GPS Solut. 2020, 24, 1–12. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR integrated navigation system for urban and indoor environments using hybrid scan matching algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [PubMed]
- Gao, G.; Lachapelle, G. INS-assisted high sensitivity GPS receivers for degraded signal navigation. In Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation, Fort Worth, TX, USA, 26–29 September 2006; Volume 2629, pp. 2977–2989. [Google Scholar]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications; Artech house: Norwood, MA, USA, 2005. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, Second Edition; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Petovello, M.; Lachapelle, G. Comparison of vector-based software receiver implementations with application to ultra-tight GPS/INS integration. Proc. ION GNSS 2006, 6, 1790–1799. [Google Scholar]
- Edwards, W.L.; Clark, B.J.; Bevly, D.M. Implementation details of a deeply integrated GPS/INS software receiver. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010. [Google Scholar]
- Xie, F.; Liu, J.; Li, R.; Jiang, B.; Qiao, L. Performance analysis of a federated ultra-tight global positioning system/inertial navigation system integration algorithm in high dynamic environments. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 2015, 229, 56–71. [Google Scholar] [CrossRef]
- Lashley, M.; Bevly, D.M. A comparison of the performance of a non-coherent deeply integrated navigation algorithm and a tightly coupled navigation algorithm. Proc. Inst. Navig. 2008, 1, 2123–2129. [Google Scholar]
- Serant, D.; Kubrak, D.; Monnerat, M.; Artaud, G.; Ries, L. Field test performance assessment of GNSS/INS ultra-tight coupling scheme targeted to mass-market applications. In Proceedings of the 6th ESA Workshop on Satellite Navigation Technologies (Navitec 2012) & European Workshop on GNSS Signals and Signal Processing, Noordwijk, The Netherlands, 5–7 December 2012. [Google Scholar]
- Lashley, M.; Bevly, D.M.; Hung, J.Y. Analysis of deeply integrated and tightly coupled architectures. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 382–396. [Google Scholar]
- Ohlmeyer, E.J. Analysis of an ultra-tightly coupled GPS/INS system in jamming. In Proceedings of the IEEE/ION Position, Location, And Navigation Symposium, Coronado, CA, USA, 25–27 April 2006; pp. 44–53. [Google Scholar]
- Parkinson, B.; Spilker, J. Progress in Astronautics and Aeronautics: Global Positioning System: Theory and Applications; American Institute of Aeronautics & Astronautics: Washington, DC, USA, 1996. [Google Scholar]
- Bhattacharyya, S.; Gebre-Egziabher, D. Integrity monitoring with vector GNSS receivers. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2779–2793. [Google Scholar] [CrossRef]
- Sturza, M.A. Navigation system integrity monitoring using redundant measurements. Navigation 1988, 35, 483–501. [Google Scholar] [CrossRef]
- Parkinson, B.W.; Axelrad, P. Autonomous GPS integrity monitoring using the pseudorange residual. Navigation 1988, 35, 255–274. [Google Scholar] [CrossRef]
- Bhatti, U.I.; Ochieng, W.Y.; Feng, S. Integrity of an integrated GPS/INS system in the presence of slowly growing errors. Part I: A critical review. Gps Solut. 2007, 11, 173–181. [Google Scholar] [CrossRef]
- Bhatti, U.I.; Ochieng, W.Y.; Feng, S. Integrity of an integrated GPS/INS system in the presence of slowly growing errors. Part II: analysis. GPS Solut. 2007, 11, 183–192. [Google Scholar] [CrossRef]
- Bhatti, U.I.; Ochieng, W.Y.; Feng, S. Performance of rate detector algorithms for an integrated GPS/INS system in the presence of slowly growing error. GPS Solut. 2012, 16, 293–301. [Google Scholar] [CrossRef]
- Walter, T.; Enge, P. Weighted RAIM for precision approach. Proc. ION GPS 1995, 8, 1995–2004. [Google Scholar]
- Pervan, B.S.; Lawrence, D.G.; Parkinson, B.W. Autonomous fault detection and removal using GPS carrier phase. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 897–906. [Google Scholar] [CrossRef]
- Hewitson, S.; Wang, J. GNSS receiver autonomous integrity monitoring (RAIM) performance analysis. GPS Solut. 2006, 10, 155–170. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Gebre-Egziabher, D. Development and validation of parametric models for vector tracking loops. Navigation 2010, 57, 275–295. [Google Scholar] [CrossRef]
- Qin, F.; Zhan, X.; Zhang, X. Detection and mitigation of errors on an ultra-tight integration system based on integrity monitoring method. In Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation, Nashville, TN, USA, 16–20 September 2013; pp. 16–20. [Google Scholar]
- Zou, X.; Lian, B.; Wu, P. Fault Identification Ability of a Robust Deeply Integrated GNSS/INS System Assisted by Convolutional Neural Networks. Sensors 2019, 19, 2734. [Google Scholar] [CrossRef]
- Erickson, J.W.; Maybeck, P.S.; Raquet, J.F. Multipath-adaptive GPS/INS receiver. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 645–657. [Google Scholar] [CrossRef]
- Psiaki, M.L. Smoother-based GPS signal tracking in a software receiver. Proc. ION GPS 2001, 2001, 2900–2913. [Google Scholar]
- Psiaki, M.L. Extended Kalman filter methods for tracking weak GPS signals. Available online: https://www.researchgate.net/publication/266370295_Extended_Kalman_Filter_Methods_for_Tracking_Weak_GPS_Signals (accessed on 22 March 2020).
- Macchi, F. Development and testing of an L1 combined GPS-Galileo software receiver. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2010. [Google Scholar]
- Shin, E.H. Accuarcy Improvement of Low Cost INS/GPS for Land Applications; Graduate Studies: Calgary, AB, Canada, 2001. [Google Scholar]
- Bhattacharyya, S.; Gebre-Egziabher, D. Vector loop RAIM in nominal and GNSS-stressed environments. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1249–1268. [Google Scholar] [CrossRef]
- Angus, J. RAIM with multiple faults. Navigation 2006, 53, 249–257. [Google Scholar] [CrossRef]
- Oh, S.H.; Hwang, D.H. Low-cost and high performance ultra-tightly coupled GPS/INS integrated navigation method. Adv. Space Res. 2017, 60, 2691–2706. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Index | Description |
|---|---|---|
| 1–3 | Attitude error vector | |
| 4–6 | Velocity error vector | |
| 7–9 | Position error vector | |
| 10–12 | Gyroscope bias error vector | |
| 13–15 | Accelerometer bias error vector | |
| 16 | Receiver clock bias error | |
| 17 | Receiver clock drift error |
| Parameters | Accelerometer | Gyroscope |
|---|---|---|
| Bias | 4 mg | 8 deg/h |
| Random walk noise | 0.16 m/s/ | 0.16 deg/ |
| Output rate | 200 Hz | 200 Hz |
| Slope | Sample Mean | Sample Standard Deviation |
|---|---|---|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Niu, Z.; Zhu, B. Fault Detection and Exclusion Method for a Deeply Integrated BDS/INS System. Sensors 2020, 20, 1844. https://doi.org/10.3390/s20071844
Sun J, Niu Z, Zhu B. Fault Detection and Exclusion Method for a Deeply Integrated BDS/INS System. Sensors. 2020; 20(7):1844. https://doi.org/10.3390/s20071844
Chicago/Turabian StyleSun, Junren, Zun Niu, and Bocheng Zhu. 2020. "Fault Detection and Exclusion Method for a Deeply Integrated BDS/INS System" Sensors 20, no. 7: 1844. https://doi.org/10.3390/s20071844
APA StyleSun, J., Niu, Z., & Zhu, B. (2020). Fault Detection and Exclusion Method for a Deeply Integrated BDS/INS System. Sensors, 20(7), 1844. https://doi.org/10.3390/s20071844