Pedestrian Navigation Method Based on Machine Learning and Gait Feature Assistance


Abstract
1. Introduction
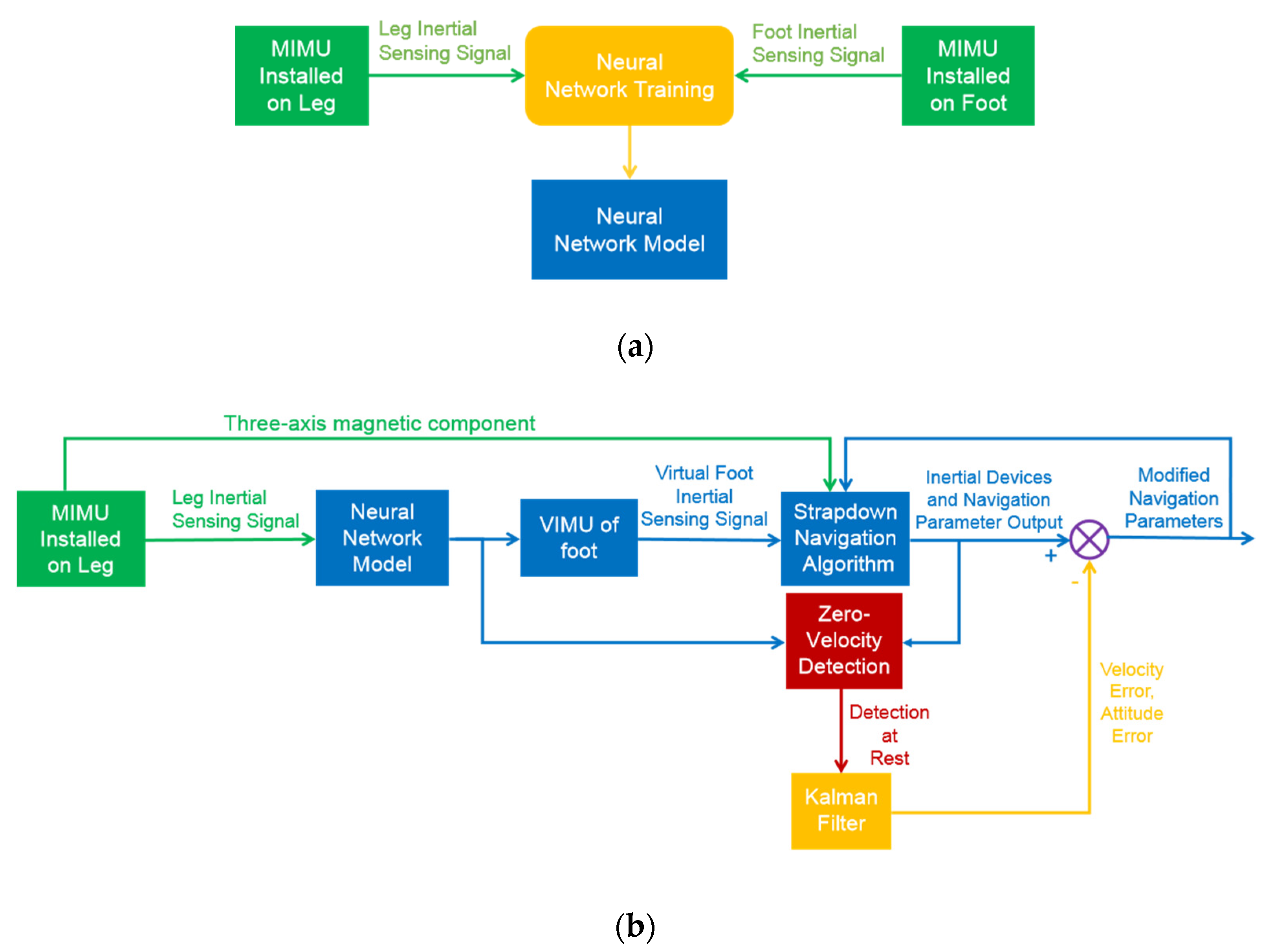
2. System Overview
2.1. Part 1
2.2. Part 2
3. Construction of VIMU Based on Machine Learning
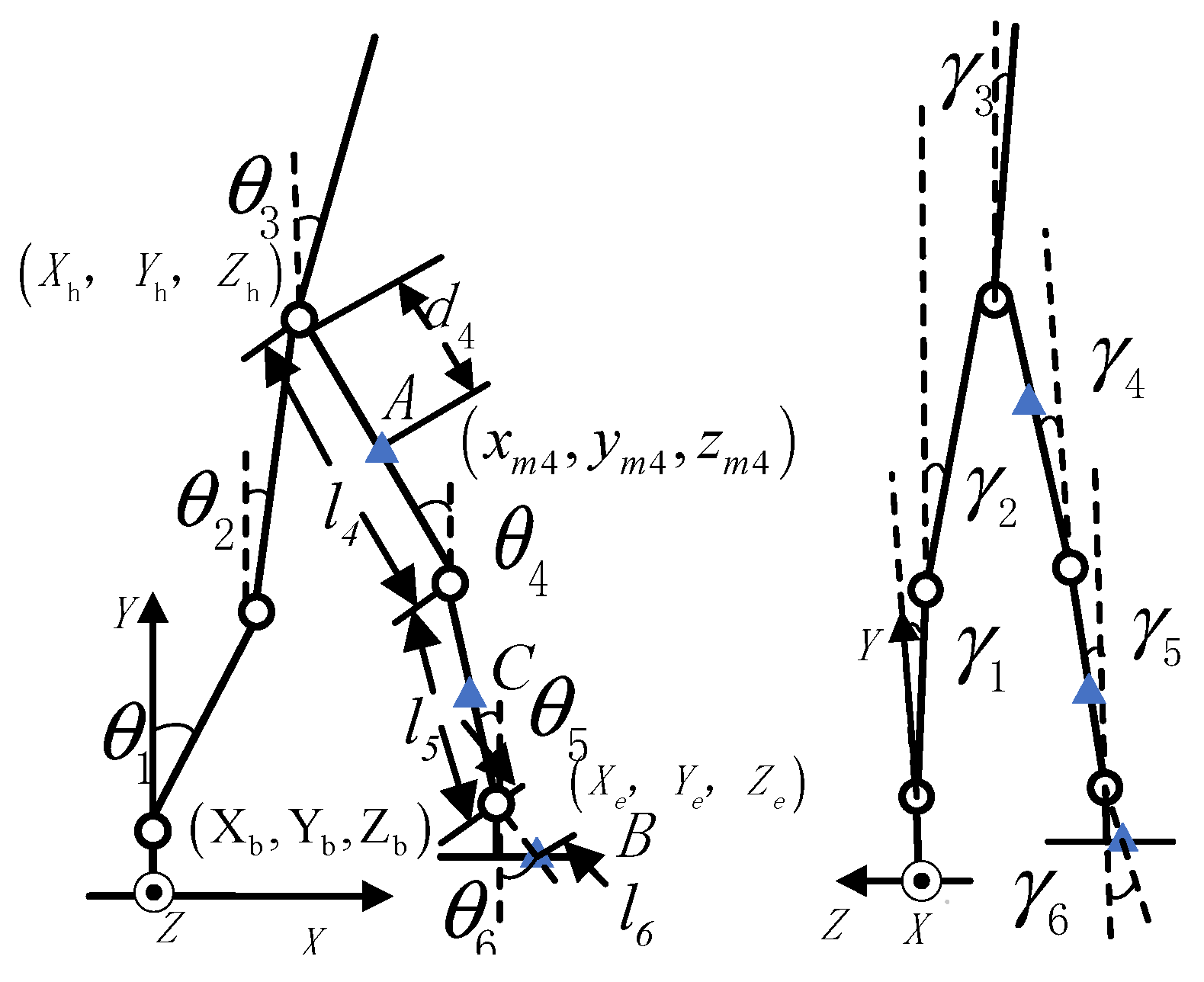
3.1. Human Lower Limb Kinematics Model
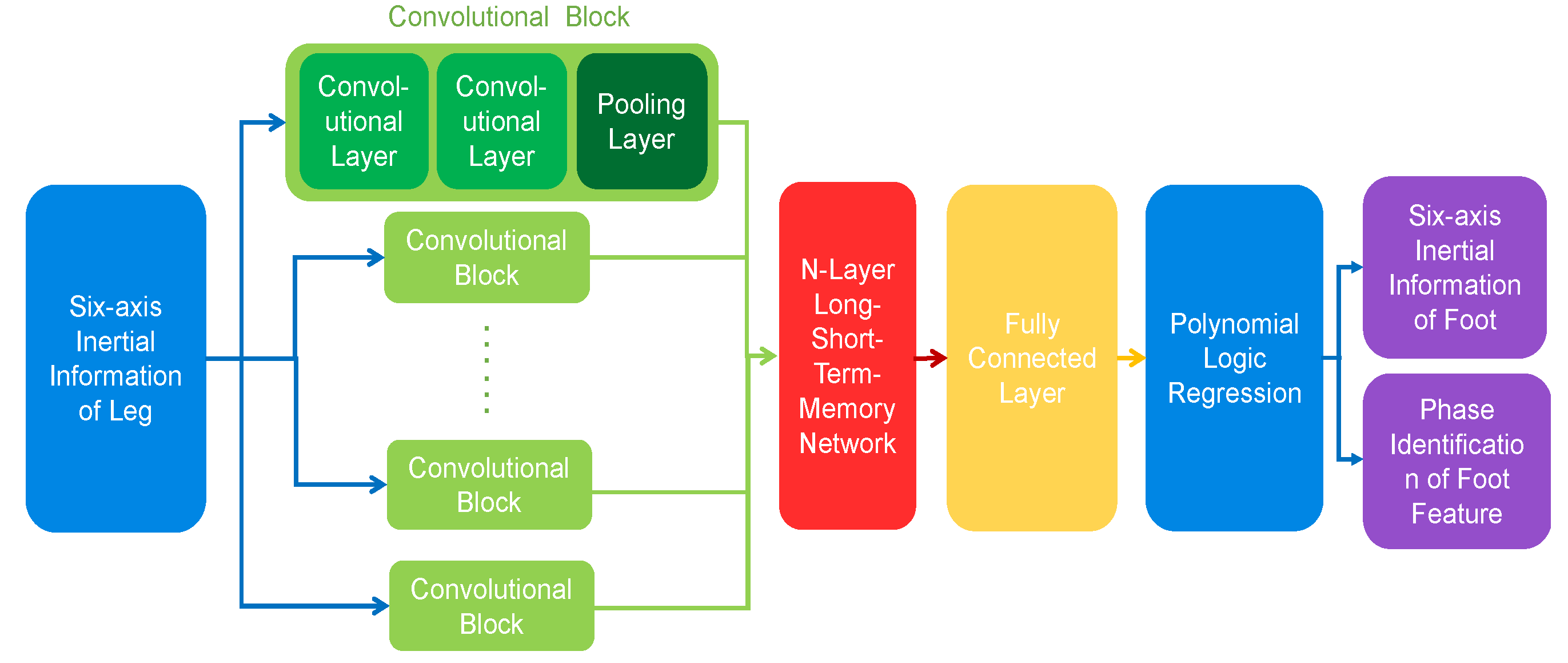
3.2. VGG-LSTM Hybrid Model Architecture
3.3. Construction of Training Model Based on VGG-LSTM Neural Network
4. Pedestrian Navigation Algorithm
4.1. Pedestrian Navigation Algorithm
4.1.1. Judge the Zero-Velocity State According to the Accelerometer and Gyroscope Output of the Virtual Foot IMU
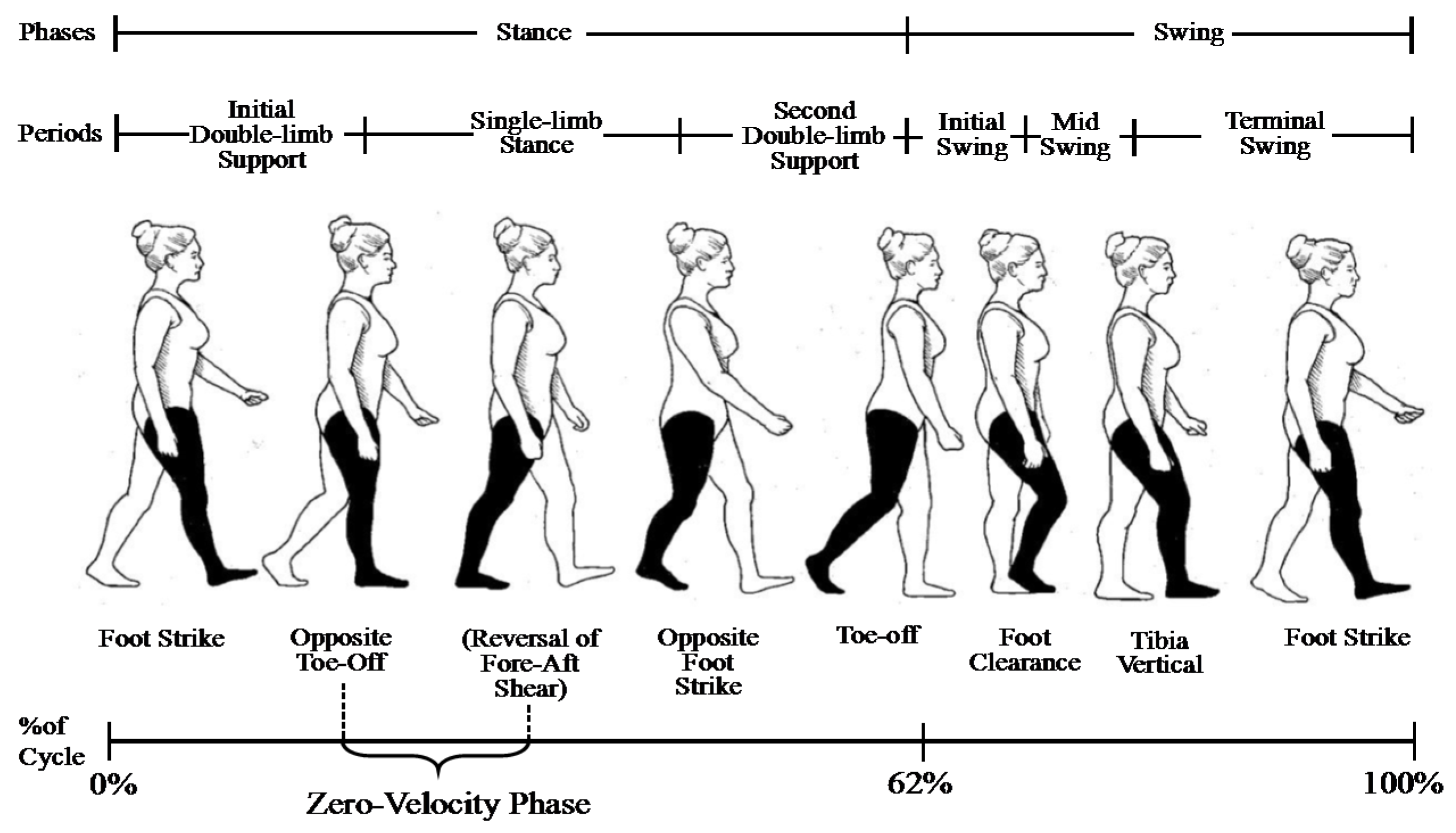
4.1.2. Judge the Zero-Velocity State According to the Recognition of Zero-Velocity Phase from all Characteristic Phases of the Foot
- (1)
- First touchdown period: the moment when the moving side heel touches the ground, accounting for about 2% of GC;
- (2)
- Load-bearing reaction period: it starts from the moment when the heel of the moving side touches the ground and lasts until the end when the toe of the opposite side leaves the ground. In the whole process, the sole of the moving side touches the ground completely, accounting for about 10% of GC;
- (3)
- In the middle stage of the supporting phase: from the moment when the toes on the opposite side are off the ground, and to the moment when the trunk is directly above the supporting leg, accounting for about 19% of GC;
- (4)
- The end of the supporting phase: form the moment when the supporting side heel leaves the ground to the moment when the opposite side heel follows the ground, accounting for about 19% of GC;
- (5)
- The earlier period of oscillation: from the moment when the opposite foot follows the ground to the moment before the toes on the supporting side leave the ground, accounting for about 12% of GC;
- (6)
- Early swing phase: from the moment when the foot is off the ground to the moment when the knee reaches the maximum bending state, accounting for about 13% of GC;
- (7)
- Middle swing phase: from the moment when the knee joint reaches the bending state to the moment when the calf swings to the place where it is perpendicular to the ground, accounting for about 12% of GC;
- (8)
- End of swinging phase: from the moment when the calf is perpendicular to the ground to the moment when the heel touches the ground again, accounting for about 13% of GC.
4.1.3. The Accuracy of Zero-Velocity Detection Algorithm
4.2. Design of the Kalman Filter
4.2.1. State Equation
4.2.2. Observation Equation
- Non-zero velocity state: no error observation, Kalman filter only updates partly, the system has no feedback of error estimation;
- Zero-velocity state: both the velocity and the attitude error are available, and the error observation is:
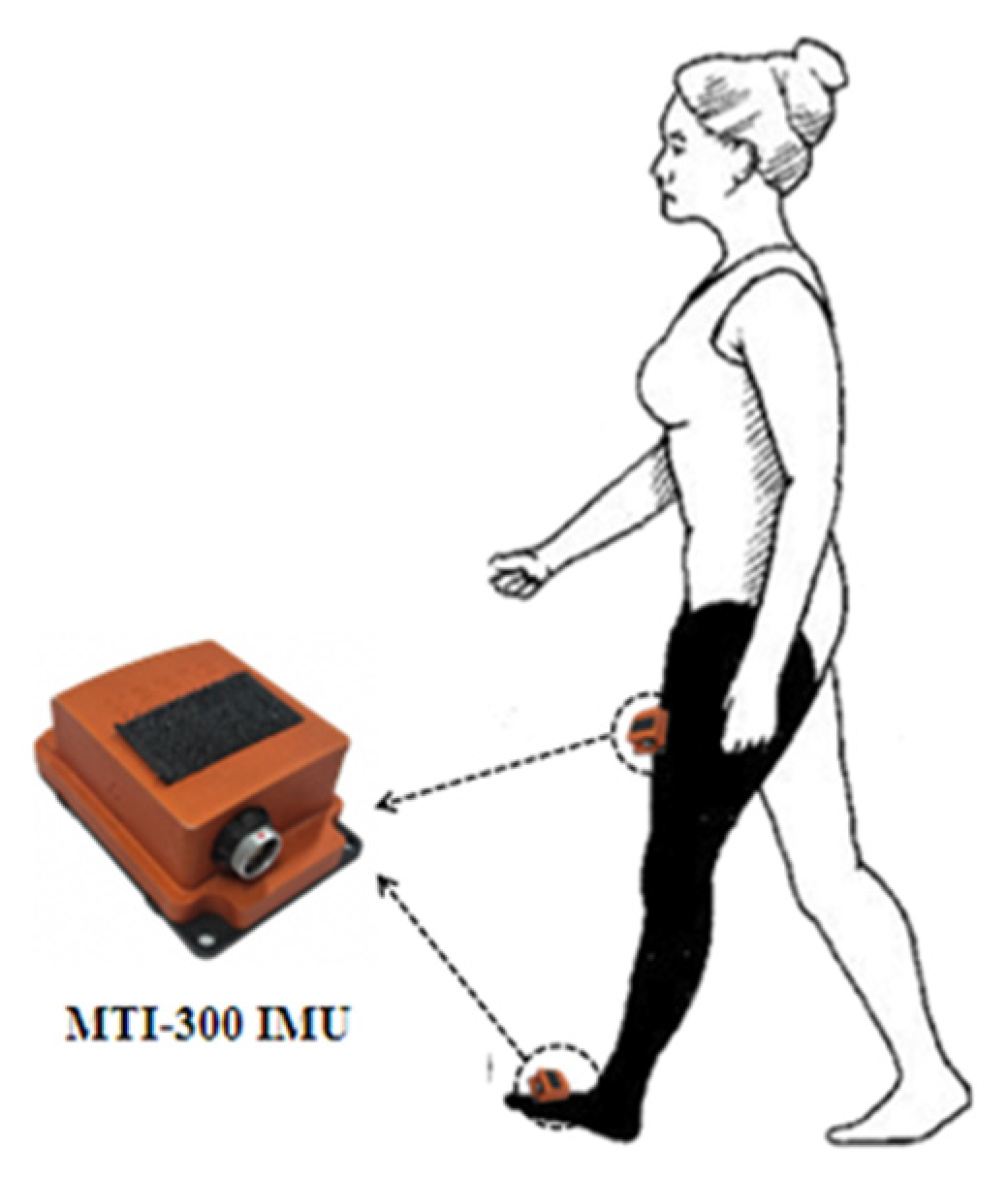
5. Experiment
- (1)
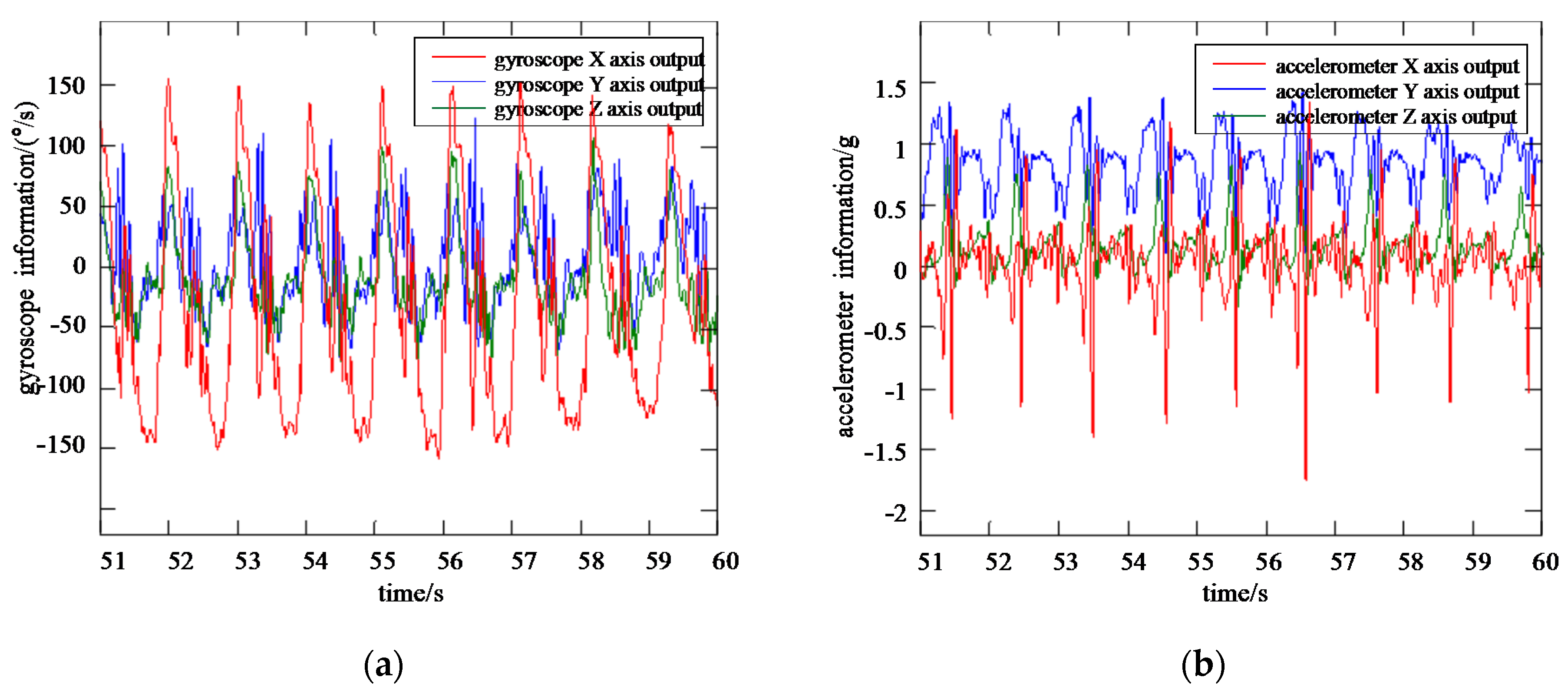
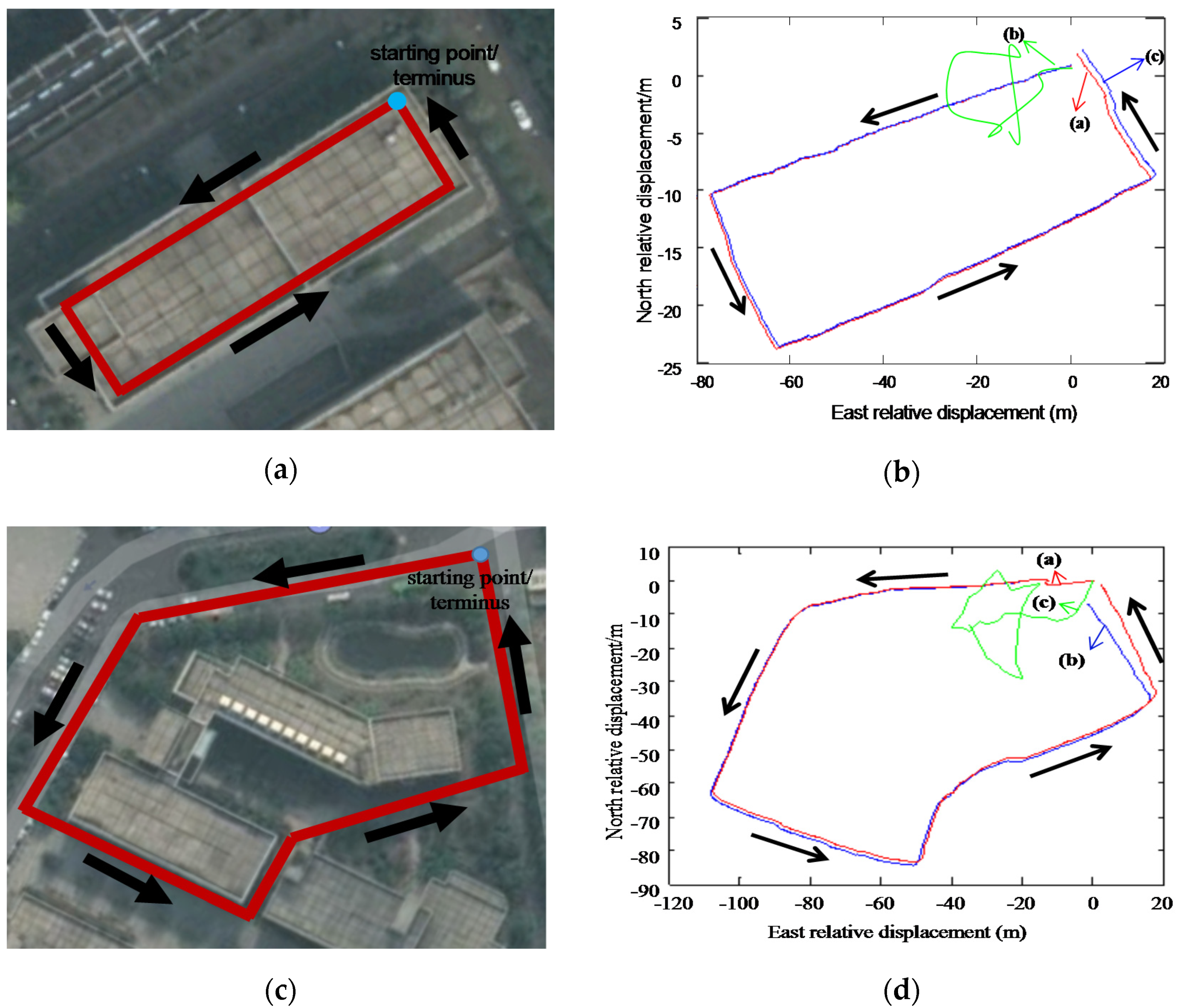
- Curve (a) is calculated from actual foot IMU at a conventional walking pace, the navigation method is assisted by the ZUPT algorithm, and the indoor positioning error of the scheme is 1.5 m, accounting for about 0.6% of the total length of the walking distance; the outdoor positioning error is 2.4 m, accounting for about 1.0% of the total length;
- (2)
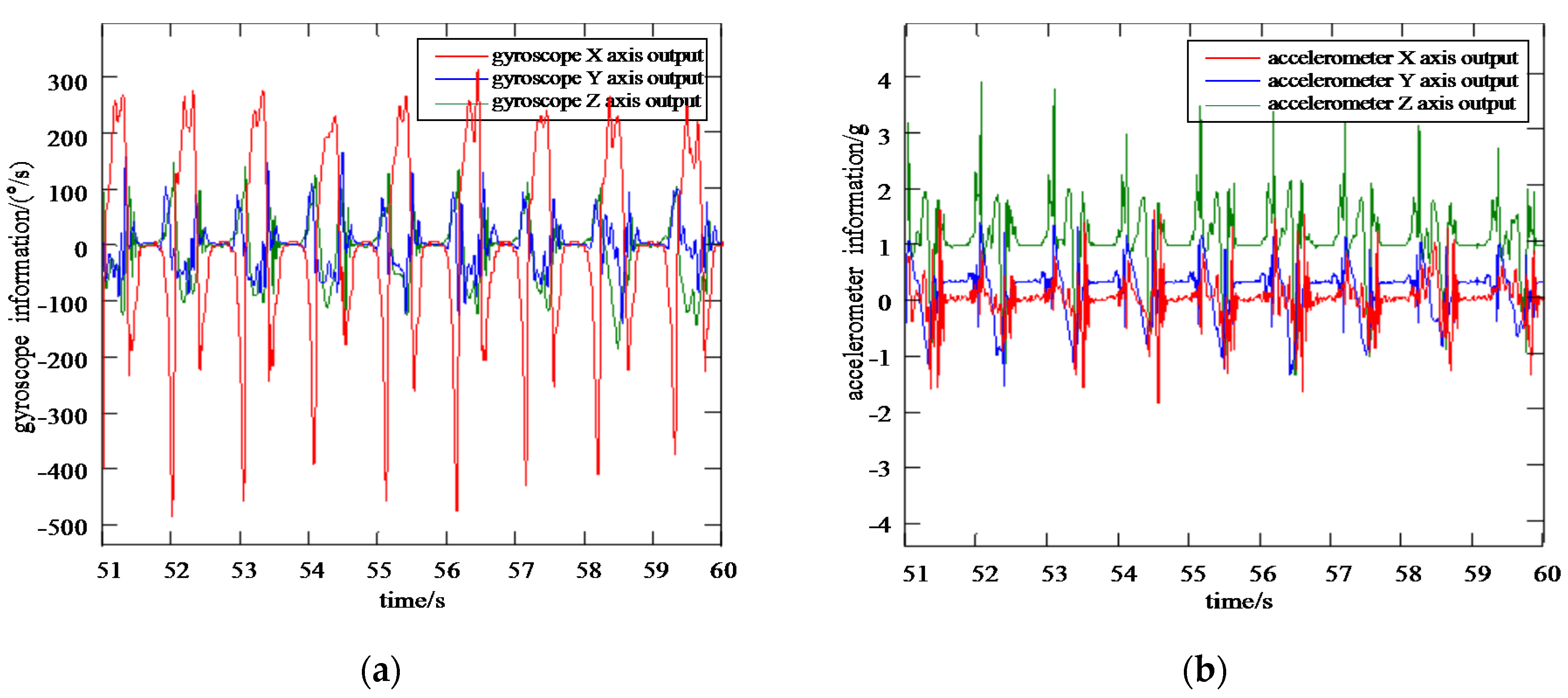
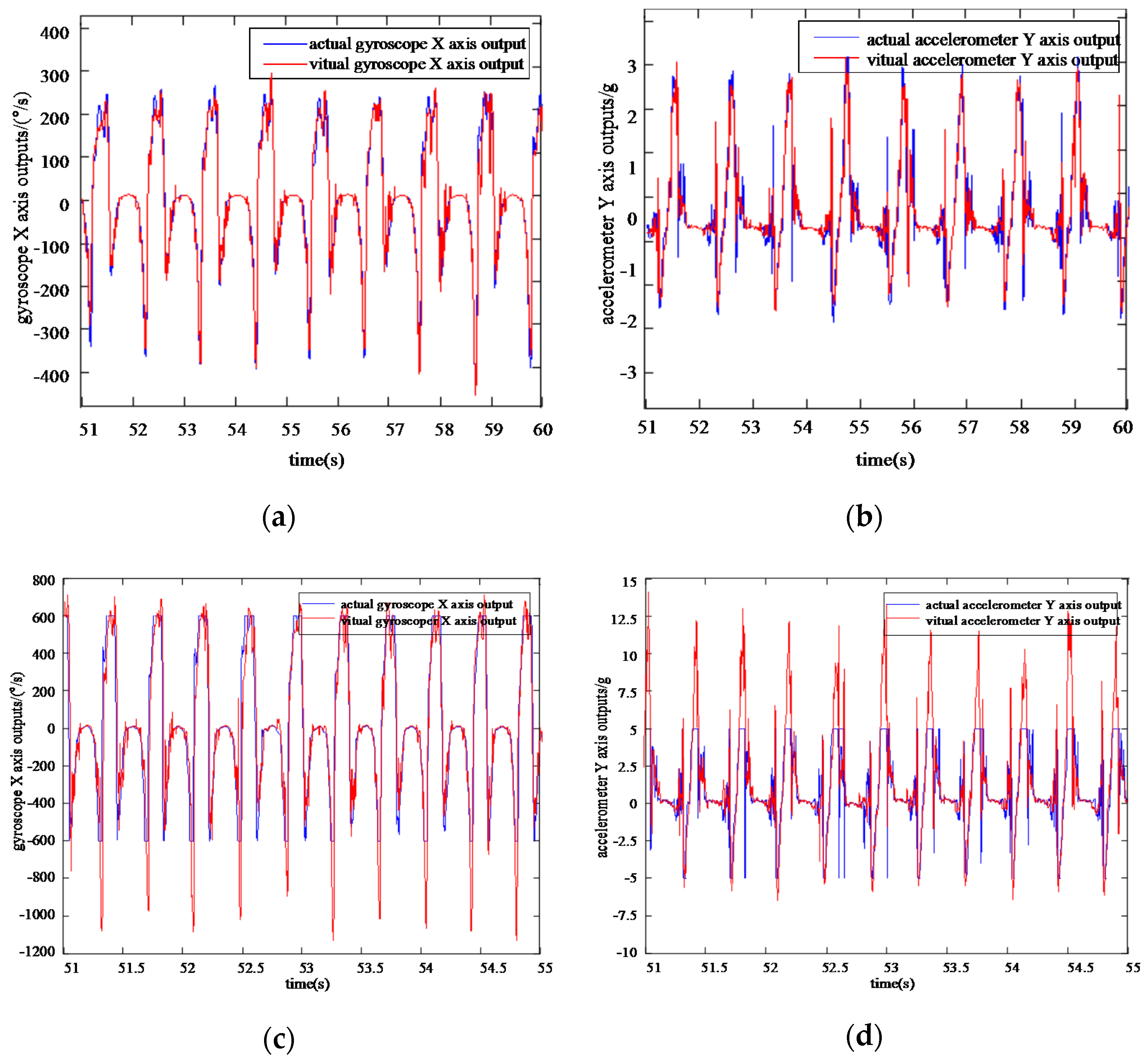
- Curve (b) is calculated from actual foot IMU at a fast walking pace, and the navigation method is assisted by ZUPT algorithm. In the later stage of walking, the extremum of angular velocity of human foot is greater than 600 (°)/s, and the extremum of acceleration is greater than 10 g. Therefore, in the case of over-range of IMU, neither indoor nor outdoor conventional ZUPT algorithm assisting methods can achieve better navigation performance;
- (3)
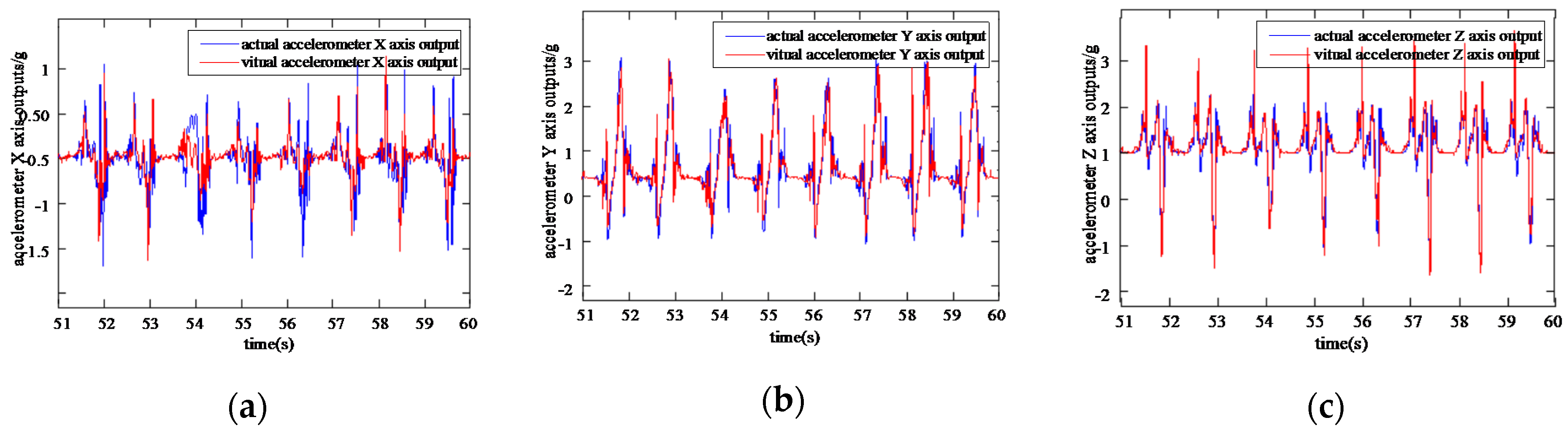
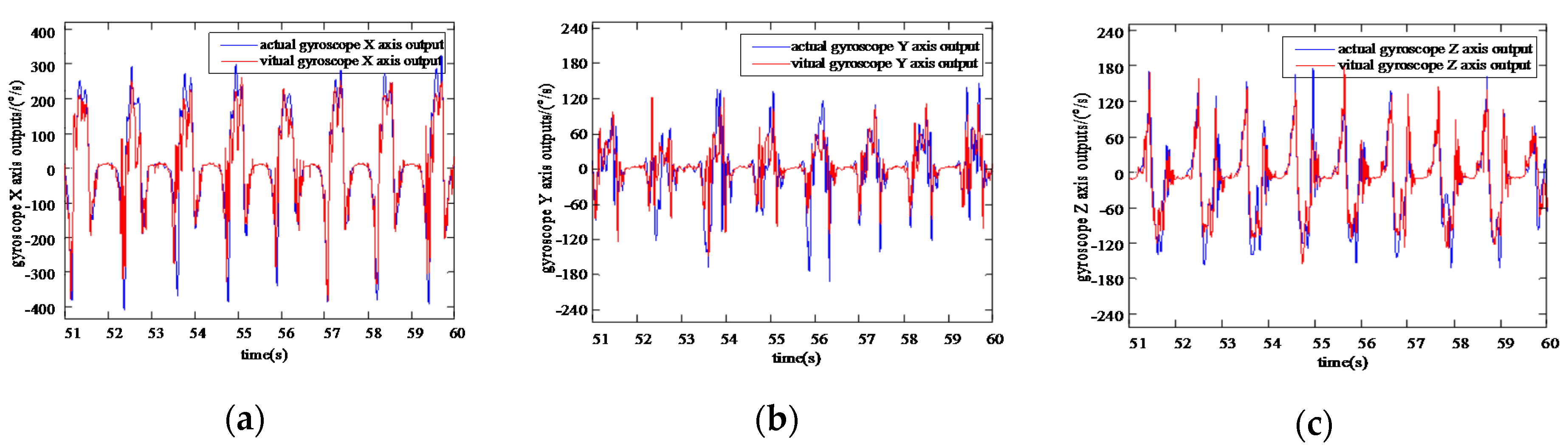
- Curve (c) is calculated from a virtual foot IMU built on the lower limb at a fast walking pace and the navigation method adopted is assisted by the ZUPT algorithm. It can be seen from the curves that the method proposed in this paper can realize navigation and positioning function at a fast walking pace, and will not be significantly affected by the over-range of IMU. However, there are training errors in the neural network model. To be specific, the indoor positioning error of the scheme is 4.8 m, accounting for about 1.3% of the total length of the walking distance; the outdoor positioning error is 7.6 m, accounting for about 2.1% of the total length of the walking distance.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Qian, W.X.; Xiong, Z.; Xie, F.; Zeng, Q.H.; Wang, Y.T.; Zhu, S. The key technologies of pedestrian navigation based on micro inertial system and biological kinematics. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 613–621. [Google Scholar]
- Kim, H.K.; Chio, M.J.; Kim, E.J.; Song, J.W. Magnetic-Map-Matching-Aided Pedestrian Navigation Using Outlier Mitigation Based on Multiple Sensors and Roughness Weighting. Sensors 2019, 19, 4782. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.X.; Wang, S.B.; Zhang, T.W.; Huang, R.; Wang, Q.W. A zero-velocity detection method with transformation on generalized likelihood ratio statistical curve. Measurement 2018, 127, 463–471. [Google Scholar] [CrossRef]
- Qian, W.X.; Zhu, X.H.; Su, Y. Personal navigation method based on foot-mounted MEMS inertial/magnetic measurement unit. J. Chin. Inert. Technol. 2012, 20, 567–572. [Google Scholar]
- Ma, M.; Song, Q.; Gu, Y.; Li, Y.H.; Zhou, Z.M. An Adaptive Zero Velocity Detection Algorithmm Based on Multi-Sensor Fusion for a Pedestrian Navigation System. Sensors 2018, 18, 3261. [Google Scholar] [CrossRef]
- Gu, Y.; Song, Q.; Li, Y.; Ma, M.; Zhou, Z. An anchor-based pedestrian navigation approach using only inertial sensors. Sensors 2016, 16, 334. [Google Scholar] [CrossRef]
- Zhang, R.; Hoflinger, F.; Reindl, L. Inertial Sensor Based Indoor Localization and Monitoring System for Emergency Responders. IEEE Sens. J. 2013, 13, 838–848. [Google Scholar] [CrossRef]
- Kuang, J.; Niu, H.J.; Chen, X.G. Robust pedestrian dead reckoning based on MEMS-IMU for smartphones. Sensors 2018, 18, 1391. [Google Scholar] [CrossRef]
- Krasuski, A.; Meina, M. Correcting Inertial Dead Reckoning Location Using Collision Avoidance Velocity-Based Map Matching. Appl. Sci. 2018, 8, 1830. [Google Scholar] [CrossRef]
- Lee, M.; Ju, H.; Song, J.; Park, C. Kinematic model-based pedestrian dead reckoning for heading correction and lower body motion tracking. Sensors 2015, 15, 28129–28153. [Google Scholar] [CrossRef]
- Wang, Z.L.; Zhao, H.Y.; Qiu, S.; Gao, Q. Stance-Phase Detection for ZUPT-Aided Foot-Mounted Pedestrian Navigation System. IEEE/ASME Trans. Mechatron. 2015, 20, 3170–3181. [Google Scholar] [CrossRef]
- Fan, Q.; Zhang, H.; Sun, Y.; Zhu, Y.; Zhuang, X.; Jia, J. An optimal enhanced kalman filter for a zupt-aided pedestrian positioning coupling model. Sensors 2018, 18, 1404. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.H.; Wang, P.Y.; Yan, D. Foot-Mounted Pedestrian Navigation Method Based on Gait Classification for Three-Dimensional Positioning. IEEE Sens. J. 2020, 20, 2045–2055. [Google Scholar] [CrossRef]
- Klingbeil, L.; Romanovas, M.; Schneider, P.; Traechtler, M.; Manoli, Y. A modular and mobile system for indoor localization. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–10. [Google Scholar]
- Alvarez, J.C.; Alvarez, D.; Lopez, A.; Gonzalez, R.C. Pedestrian navigation based on a waist-worn inertial sensor. Sensors 2012, 12, 10536–10549. [Google Scholar] [CrossRef] [PubMed]
- Hsu, Y.L.; Wang, J.S.; Chang, C.W. A wearable inertial pedestrian navigation system with quaternion-based extended kalman filter for pedestrian localization. IEEE Sens. J. 2017, 17, 3193–3206. [Google Scholar] [CrossRef]
- Aboelmagd, N.; Ahmed, E.; Mohamed, B. GPS/INS intergration utilizing dynamic neural network for vehicular navigation. Inf. Fusion 2014, 12, 48–57. [Google Scholar]
- Chiang, K.W.; Chang, H.W. Intelligent sensor positioning and orientation through construction algorithm. Sensors 2013, 10, 9252–9285. [Google Scholar] [CrossRef]
- Ko, B.S.; Choi, H.J.; Hong, C.; Kim, J.-H.; Kwon, O.C.; Yoo, C.D. Neural Network-based Autonomous Navigation for a Homecare Mobile Robot. In Proceedings of the 2017 IEEE International Conference on Big Data and Smart Computing (BigComp), Jeju, Korea, 13–16 February 2017; pp. 403–406. [Google Scholar]
- Wang, Z.C.; Xiong, Z.; Lin, P.; Xu, J.X.; Huang, X.; Xu, L.M. A Method of Inertial Integrated Navigation Based on Low Cost MEMS Sensors. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 1372–1378. [Google Scholar]
- Ju, H.; Park, C.G. A pedestrian dead reckoning system using a foot kinematic constraint and shoe modeling for various motions. Sens. Actuators 2018, 284, 135–144. [Google Scholar] [CrossRef]
- Martin, R.F.; Parisi, D.R. Data-driven simulation of pedestrian collision avoidance with a nonparametric neural network. Neurocomputing 2020, 379, 130–140. [Google Scholar] [CrossRef]
- Qian, W.X.; Zhu, Y.H.; Xie, F.; Wang, Y.T.; Zhang, Y.; Song, T.W. Construction of human body virtual inertial measurement component based on machine learning. J. Chin. Inert. Technol. 2017, 25, 289–293. [Google Scholar]
- Ren, B.; Liu, J.W.; Luo, X.R.; Chen, J.Y. On the kinematic design of anthropomorphic lower limb exoskeletons and their matching movement. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef]
- Teng, Q.L.; Kelishomi, A.E.; Cai, Z.M. A deep model for human activity recognition using motion sensor data. J. Xi’an Jiaotong Univ. 2018, 52, 60–67. [Google Scholar]
- Ronao, C.A.; Cho, S.B. Human activity recognition with smartphone sensors using deep learning neural networks. Expert Syst. Appl. 2016, 59, 235–244. [Google Scholar] [CrossRef]
- Huang, X.; Xiong, Z.; Xu, J.X. Research on pedestrian navigation algorithm based on zero velocity update/Heading Error Self-observation/Geomagnetic Matching. Acta Armamentarii 2017, 38, 2031–2040. [Google Scholar]
- Zou, W.Y.; Kamata, S.I. Frontal Gait Recognition from Incomplete RGB-D Streams Using Gait Cycle Analysis. In Proceedings of the Joint 7th International Conference on Informatics, Electronics & Vision (ICIEV)/2nd International Conference on Imaging, Vision and Pattern Recognition (icIVPR), Fukuoka, Japan, 25–28 June 2018; pp. 453–458. [Google Scholar]
- Jia, Z.Y.; Lv, Z.W.; Zhang, L.D.; Gao, Y.J.; Zhou, P.J. Double-threshold zero-velocity interval detection algorithm for multi-movement patterns. J. Chin. Inert. Technol. 2018, 26, 597–602. [Google Scholar]
- Cen, S.X.; Gao, Z.B.; Yu, M.; Zeng, C. Pedestrian Inertial Navigation Zero-Speed Detection Algorithm Based on Adaptive Threshold. Piezoelectr. Acoustoopt. 2019, 41, 601–606. [Google Scholar]
- Zhang, J.M.; Xiu, C.D.; Yang, W.; Yang, D.K. Adaptive threshold zero-velocity update algorithm under multi-movement patterns. J. Beijing Univ. Aeronaut. Astronaut. 2018, 44, 636–644. [Google Scholar]
- Zhang, J.L.; Qin, Y.Y.; Mei, C.B. Shoe mounted personal navigation system based on MEMS inertial technology. J. Chin. Inert. Technol. 2011, 19, 253–256. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gait Types | The Zero-Velocity Interval Detection Accuracy | ||
|---|---|---|---|
| Double Threshold Algorithm | Adaptive Threshold Algorithm | Proposed Algorithm | |
| Horizontal walking | 98.7% | 98.9% | 99.3% |
| Upstairs | 98.3% | 98.5% | 98.8% |
| Downstairs | 98.2% | 98.3% | 98.7% |
| Upslope | 98.5% | 98.7% | 99.1% |
| Downslope | 98.3% | 98.6% | 99.0% |
| Fast walking | 97.6% | 98.0% | 98.5% |
| Gait Types | Actual Step Numbers | Detected Step Numbers | The Accuracy of Detection |
|---|---|---|---|
| Horizontal walking | 500 | 500 | 100.0% |
| Upstairs | 500 | 500 | 100.0% |
| Downstairs | 500 | 500 | 100.0% |
| Upslope | 500 | 500 | 100.0% |
| Downslope | 500 | 500 | 100.0% |
| Fast walking | 500 | 496 | 99.2% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Yang, S.; Ni, Z.; Qian, W.; Gu, C.; Cao, Z. Pedestrian Navigation Method Based on Machine Learning and Gait Feature Assistance. Sensors 2020, 20, 1530. https://doi.org/10.3390/s20051530
Zhou Z, Yang S, Ni Z, Qian W, Gu C, Cao Z. Pedestrian Navigation Method Based on Machine Learning and Gait Feature Assistance. Sensors. 2020; 20(5):1530. https://doi.org/10.3390/s20051530
Chicago/Turabian StyleZhou, Zijun, Shuqin Yang, Zhisen Ni, Weixing Qian, Cuihong Gu, and Zekun Cao. 2020. "Pedestrian Navigation Method Based on Machine Learning and Gait Feature Assistance" Sensors 20, no. 5: 1530. https://doi.org/10.3390/s20051530
APA StyleZhou, Z., Yang, S., Ni, Z., Qian, W., Gu, C., & Cao, Z. (2020). Pedestrian Navigation Method Based on Machine Learning and Gait Feature Assistance. Sensors, 20(5), 1530. https://doi.org/10.3390/s20051530