Visual-Based Defect Detection and Classification Approaches for Industrial Applications—A SURVEY

 ,
,  ,
,  and
and
Abstract
1. Introduction
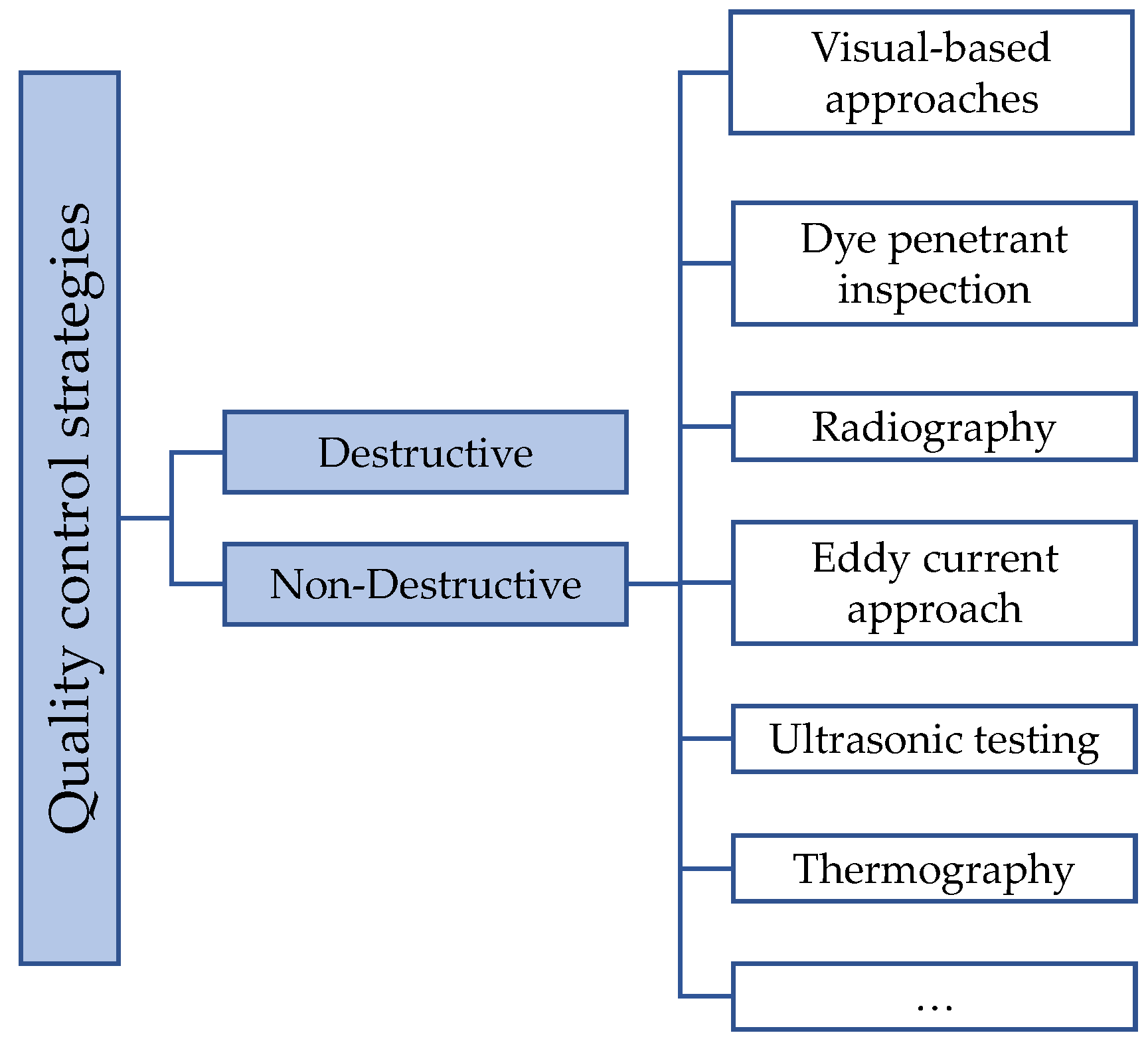
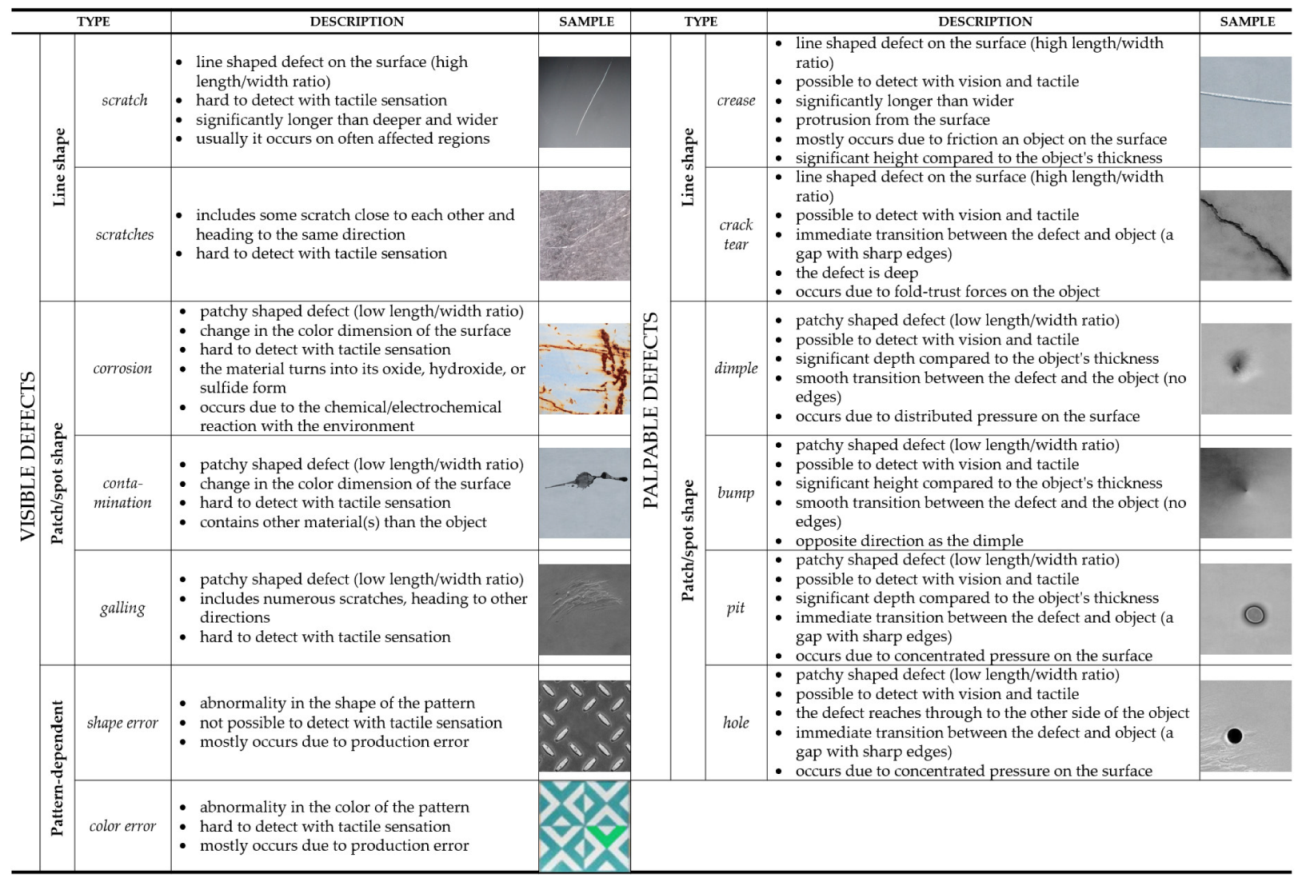
2. Taxonomy of Surface Defects
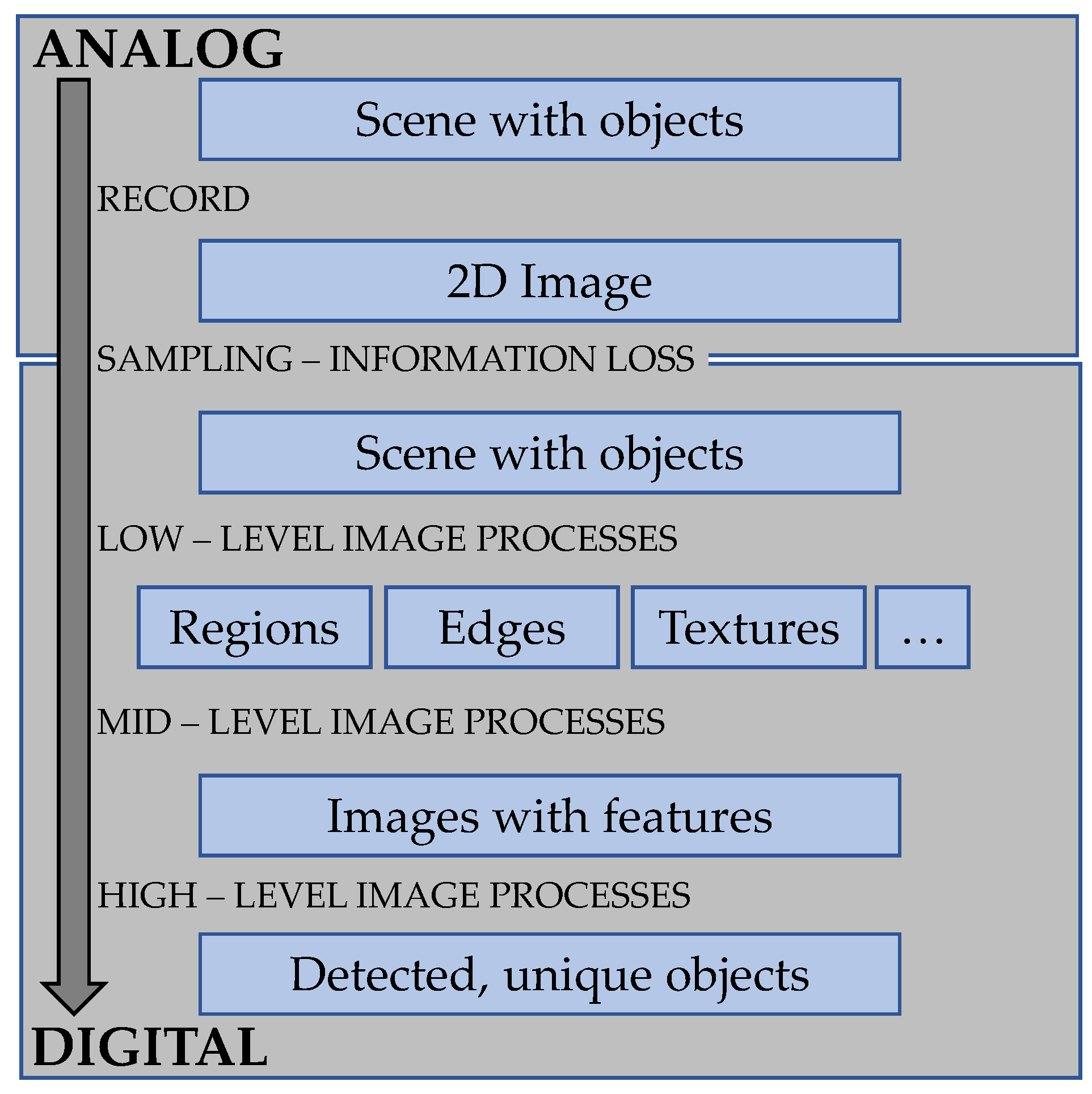
3. Artificial Visual Processing Techniques
4. Textural Defect Detection
4.1. Statistical Approaches
4.2. Structural Approaches
4.3. Filter-Based Approaches
4.4. Model-Based Approaches (MBAs)
4.5. Resource Dependency Comparison
5. Supervised and Non-Supervised Classifiers
Deep Learning for Defect Detection
6. Conclusions and Future Directions
Funding
Acknowledgments
Conflicts of Interest
References
- Bircham, D. Non-destructive testing: Curtis, G. Acoustic emission energy relates to bond strength8 (1975) (5) (October) 249–257. Non-Destr. Test. 1975, 8, 308. [Google Scholar] [CrossRef]
- Xie, X. A review of recent advances in surface defect detection using texture analysis techniques. Electron. Lett. Comput. Vis. Image Anal. 2008, 7, 1–22. [Google Scholar] [CrossRef]
- Luo, Q.; Fang, X.; Liu, L.; Yang, C.; Sun, Y. Automated Visual Defect Detection for Flat Steel Surface: A Survey. IEEE Trans. Instrum. Meas. 2020. [Google Scholar] [CrossRef]
- Ngan, H.Y.; Pang, G.K.; Yung, N.H. Automated fabric defect detection–a review. Image Vis. Comput. 2011, 29, 442–458. [Google Scholar] [CrossRef]
- Kumar, A. Computer-vision-based fabric defect detection: A survey. IEEE Trans. Ind. Electron. 2008, 55, 348–363. [Google Scholar] [CrossRef]
- Tsai, I.S.; Lin, C.H.; Lin, J.J. Applying an artificial neural network to pattern recognition in fabric defects. Text. Res. J. 1995, 65, 123–130. [Google Scholar] [CrossRef]
- Ng, H.F. Automatic thresholding for defect detection. Pattern Recognit. Lett. 2006, 27, 1644–1649. [Google Scholar] [CrossRef]
- Yuan, X.C.; Wu, L.S.; Peng, Q. An improved Otsu method using the weighted object variance for defect detection. Appl. Surf. Sci. 2015, 349, 472–484. [Google Scholar] [CrossRef]
- Aminzadeh, M.; Kurfess, T. Automatic thresholding for defect detection by background histogram mode extents. J. Manuf. Syst. 2015, 37, 83–92. [Google Scholar] [CrossRef]
- Dastoorian, R.; Elhabashy, A.E.; Tian, W.; Wells, L.J.; Camelio, J.A. Automated Surface Inspection Using 3D Point Cloud Data in Manufacturing: A Case Study. In Proceedings of the ASME 2018 13th International Manufacturing Science and Engineering Conference, Los Angeles, CA, USA, 18–22 June 2018. [Google Scholar]
- Asha, V.; Bhajantri, N.U.; Nagabhushan, P. GLCM-based chi-square histogram distance for automatic detection of defects on patterned textures. arXiv 2012, arXiv:1212.0383. [Google Scholar] [CrossRef]
- Niskanen, M.; Silvén, O.; Kauppinen, H. Color and texture based wood inspection with non-supervised clustering. In Proceedings of the Scandinavian Conference on Image Analysis, Bergen, Noreg, 11–14 June 2001; pp. 336–342. [Google Scholar]
- Kauppinen, H.; Rautio, H.; Silven, O. Nonsegmenting defect detection and SOM-based classification for surface inspection using color vision. In Polarization and Color Techniques in Industrial Inspection; Marszalec, E.A., Trucco, E., Eds.; International Society for Optics and Photonics; (SPIE): Bellingham, WA, USA, 1999; Volume 3826, pp. 270–280. [Google Scholar] [CrossRef]
- Kim, C.W.; Koivo, A.J. Hierarchical classification of surface defects on dusty wood boards. Pattern Recognit. Lett. 1994, 15, 713–721. [Google Scholar] [CrossRef]
- Conners, R.W.; Mcmillin, C.W.; Lin, K.; Vasquez-Espinosa, R.E. Identifying and locating surface defects in wood: Part of an automated lumber processing system. IEEE Trans. Pattern Anal. Mach. Intell. 1983, 6, 573–583. [Google Scholar] [CrossRef] [PubMed]
- Siew, L.H.; Hodgson, R.M.; Wood, E.J. Texture measures for carpet wear assessment. IEEE Trans. Pattern Anal. Mach. Intell. 1988, 10, 92–105. [Google Scholar] [CrossRef]
- Iivarinen, J.; Rauhamaa, J.; Visa, A. Unsupervised segmentation of surface defects. In Proceedings of the 13th International Conference on Pattern Recognition, Vienna, Austria, 25–29 August 1996; pp. 356–360. [Google Scholar]
- Bodnarova, A.; Williams, J.A.; Bennamoun, M.; Kubik, K.K. Optimal textural features for flaw detection in textile materials. In Proceedings of the IEEE TENCON’97, IEEE Region 10 Annual Conference, Speech and Image Technologies for Computing and Telecommunications (Cat. No. 97CH36162), Brisbane, Australia, 4 December 1997; pp. 307–310. [Google Scholar]
- Raheja, J.L.; Ajay, B.; Chaudhary, A. Real time fabric defect detection system on an embedded DSP platform. Optik 2013, 124, 5280–5284. [Google Scholar] [CrossRef]
- Raheja, J.L.; Kumar, S.; Chaudhary, A. Fabric defect detection based on GLCM and Gabor filter: A comparison. Optik 2013, 124, 6469–6474. [Google Scholar] [CrossRef]
- Samy, M.P.; Foong, S.; Soh, G.S.; Yeo, K.S. Automatic optical & laser-based defect detection and classification in brick masonry walls. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Marina Bay Sands, Singapore, 22–25 November 2016; pp. 3521–3524. [Google Scholar]
- Li, X.; Jiang, H.; Yin, G. Detection of surface crack defects on ferrite magnetic tile. NDT E Int. 2014, 62, 6–13. [Google Scholar] [CrossRef]
- Zhu, D.; Pan, R.; Gao, W.; Zhang, J. Yarn-dyed fabric defect detection based on autocorrelation function and GLCM. Autex Res. J. 2015, 15, 226–232. [Google Scholar] [CrossRef]
- Haralick, R.M. Statistical and structural approaches to texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Latif-Amet, A.; Ertüzün, A.; Erçil, A. An efficient method for texture defect detection: Sub-band domain co-occurrence matrices. Image Vis. Comput. 2000, 18, 543–553. [Google Scholar] [CrossRef]
- Ozdemir, S.; Baykut, A.; Meylani, R.; Ercil, A.; Ertuzun, A. Comparative evaluation of texture analysis algorithms for defect inspection of textile products. In Proceedings of the Fourteenth International Conference on Pattern Recognition (Cat. No.98EX170), Brisbane, Australia, 20–20 August 1998; pp. 1738–1740. [Google Scholar]
- Shiranita, K.; Miyajima, T.; Takiyama, R. Determination of meat quality by texture analysis. Pattern Recognit. Lett. 1998, 19, 1319–1324. [Google Scholar] [CrossRef]
- Iivarinen, J. Surface defect detection with histogram-based texture features. In Proceedings of the Intelligent Robots and Computer Vision XIX: Algorithms, Techniques, and Active Vision, International Society for Optics and Photonics, Boston, MA, USA, 11 October 2000; Volume 4197, pp. 140–145. [Google Scholar]
- Capizzi, G.; Sciuto, G.L.; Napoli, C.; Tramontana, E.; Woźniak, M. Automatic classification of fruit defects based on co-occurrence matrix and neural networks. In Proceedings of the 2015 Federated Conference on Computer Science and Information Systems (FedCSIS), Lodz, Poland, 13–16 September 2015; pp. 861–867. [Google Scholar]
- Zhang, L.; Jing, J.; Zhang, H. Fabric defect classification based on LBP and GLCM. J. Fiber Bioeng. Inf. 2015, 8, 81–89. [Google Scholar] [CrossRef]
- Mäenpää, T.; Turtinen, M.; Pietikäinen, M. Real-time surface inspection by texture. Real-Time Imaging 2003, 9, 289–296. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikäinen, M.; Harwood, D. A comparative study of texture measures with classification based on featured distributions. Pattern Recognit. 1996, 29, 51–59. [Google Scholar] [CrossRef]
- Monadjemi, A. Non-Destructive Testing. Insight –Non-Destr. Test. Cond. Monit. 2004, 46, 573–579. [Google Scholar] [CrossRef]
- Niskanen, M.; Kauppinen, H.; Silvén, O. Real-time aspects of SOM-based visual surface inspection. In Proceedings of the International Society for Optics and Photonics Machine Vision Applications in Industrial Inspection X, San Jose, CA, USA, 8 March 2002; Volume 4664, pp. 123–134. [Google Scholar]
- Mäenpää, T.; Pietikäinen, M. Texture analysis with local binary patterns. In Handbook of Pattern Recognition and Computer Vision; World Scientific: Singapore, 2005; pp. 197–216. [Google Scholar]
- Mäenpää, T.; Viertola, J.; Pietikäinen, M. Optimising colour and texture features for real-time visual inspection. Pattern Anal. Appl. 2003, 6, 169–175. [Google Scholar] [CrossRef]
- Wang, J.; Li, Q.; Gan, J.; Yu, H.; Yang, X. Surface Defect Detection via Entity Sparsity Pursuit with Intrinsic Priors. IEEE Trans. Ind. Inf. 2019, 16, 141–150. [Google Scholar] [CrossRef]
- Sindagi, V.A.; Srivastava, S. Oled panel defect detection using local inlier-outlier ratios and modified LBP. In Proceedings of the 2015 14th IAPR International Conference on Machine Vision Applications (MVA), Tokyo, Japan, 18–22 May 2015; pp. 214–217. [Google Scholar]
- Kang, X.; Yang, P.; Jing, J. Defect detection on printed fabrics via gabor filter and regular band. J. Fiber Bioeng. Inf. 2015, 8, 195–206. [Google Scholar] [CrossRef]
- Kumar, A. Neural network based detection of local textile defects. Pattern Recognit. 2003, 36, 1645–1659. [Google Scholar] [CrossRef]
- Chetverikov, D. Structural defects: General approach and application to textile inspection. In Proceedings of the 15th International Conference on Pattern Recognition, Barcelona, Spain, 3–7 September 2000; pp. 521–524. [Google Scholar]
- Schael, M. Texture defect detection using invariant textural features. In Joint Pattern Recognition Symposium; Springer: Berlin, Germany, 2001; pp. 17–24. [Google Scholar]
- Tsai, D.M.; Tsai, Y.H. Defect detection in textured surfaces using color ring-projection correlation. Mach. Vis. Appl. 2003, 13, 194–200. [Google Scholar] [CrossRef][Green Version]
- Cho, C.S.; Chung, B.M.; Park, M.J. Development of real-time vision-based fabric inspection system. IEEE Trans. Ind. Electron. 2005, 52, 1073–1079. [Google Scholar] [CrossRef]
- Wood, E.J. Applying Fourier and associated transforms to pattern characterization in textiles. Text. Res. J. 1990, 60, 212–220. [Google Scholar] [CrossRef]
- Huang, Y.; Chan, K.L. Texture decomposition by harmonics extraction from higher order statistics. IEEE Trans. Image Process. 2004, 13, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Lopez, F.; Acebron, F.; Valiente, J.; Perez, E. A study of registration methods for ceramic tile inspection purposes. In Proceedings of the IX Spanish Symposium on Pattern Recognition and Image Analysis, Benicasim, Spain, 16–18 May 2001; pp. 145–150. [Google Scholar]
- Shippen, J.; Westra, R.; Freear, N. Printing quality control using template independent neurofuzzy defect classification. In EUFIT’99 (Abstract Booklet with CD Rom); ELITE Foundation (ELITE Foundation (European Laboratory for Intelligent Techniques Engineering): Aachen, Germany, 1999. [Google Scholar]
- Costa, C.E.; Petrou, M. Automatic registration of ceramic tiles for the purpose of fault detection. Mach. Vis. Appl. 2000, 11, 225–230. [Google Scholar] [CrossRef]
- Xie, P.; Guan, S.U. A golden-template self-generating method for patterned wafer inspection. Mach. Vis. Appl. 2000, 12, 149–156. [Google Scholar] [CrossRef]
- Kittler, J.; Marik, R.; Mirmehdi, M.; Petrou, M.; Song, J. Detection of Defects in Colour Texture Surfaces. In Proceedings of the IAPR Workshop on Machine Vision Applications (MVA), Kawasaki, Japan, 13–15 December 1994; pp. 558–567. [Google Scholar]
- Song, K.Y.; Kittler, J.; Petrou, M. Defect detection in random colour textures. Image Vis. Comput. 1996, 14, 667–683. [Google Scholar] [CrossRef]
- Wen, W.; Xia, A. Verifying edges for visual inspection purposes. Pattern Recognit. Lett. 1999, 20, 315–328. [Google Scholar] [CrossRef]
- Chen, J.; Jain, A.K. A structural approach to identify defects in textured images. In Proceedings of the 1988 IEEE International Conference on Systems, Man, and Cybernetics, Beijing, China, 8–12 August 1988; pp. 29–32. [Google Scholar]
- Bennamoun, M.; Bodnarova, A. Automatic visual inspection and flaw detection in textile materials: Past, present and future. In Proceedings of the 1998 IEEE International Conference on Systems, Man, and Cybernetics (Cat. No. 98CH36218), San Diego, CA, USA, 14 October 1998; pp. 4340–4343. [Google Scholar]
- Mallik-Goswami, B.; Datta, A.K. Detecting defects in fabric with laser-based morphological image processing. Text. Res. J. 2000, 70, 758–762. [Google Scholar] [CrossRef]
- Tolba, A.; Raafat, H.M. Multiscale image quality measures for defect detection in thin films. Int. J. Adv. Manuf. Technol. 2015, 79, 113–122. [Google Scholar] [CrossRef]
- Cao, J.; Zhang, J.; Wen, Z.; Wang, N.; Liu, X. Fabric defect inspection using prior knowledge guided least squares regression. Multimed. Tools Appl. 2017, 76, 4141–4157. [Google Scholar] [CrossRef]
- Cord, A.; Chambon, S. Automatic Road Defect Detection by Textural Pattern Recognition Based on AdaBoost. Comput. Aided Civ. Infrastruct. Eng. 2012, 27, 244–259. [Google Scholar] [CrossRef]
- Yun, J.P.; Lee, S.J.; Koo, G.; Shin, C.; Park, C. Automatic defect inspection system for steel products with exhaustive dynamic encoding algorithm for searches. Opt. Eng. 2019, 58, 023107. [Google Scholar]
- Marr, D.; Hildreth, E. Theory of edge detection. Philos. Trans. R. Soc. Lond. Ser. B 1980, 207, 187–217. [Google Scholar]
- Neubauer, C. Segmentation of defects in textile fabric. In Proceedings of the 11th IAPR International Conference on Pattern Recognition, The Hague, The Netherlands, 30 August–3 September 1992; pp. 688–691. [Google Scholar]
- Unser, M.; Ade, F. Feature extraction and decision procedure for automated inspection of textured materials. Pattern Recognit. Lett. 1984, 2, 185–191. [Google Scholar] [CrossRef]
- Ade, F. Application of principal component analysis to the inspection of industrial goods. In Proceedings of the Applications of Digital Image Processing V. International Society for Optics and Photonics, Geneva, Switzerland, 26 October 1983; Volume 397, pp. 216–223. [Google Scholar]
- Monadjemi, A.; Mirmehdi, M.; Thomas, B. Restructured eigenfilter matching for novelty detection in random textures. Learning 2004, 5, 13. [Google Scholar]
- Ade, F.; Lins, N.; Unser, M. Comparison of various filter sets for defect detection in textiles. In Proceedings of the International Conference on Pattern Recognition, Montreal, QC, Canada, 30 July–2 August 1984; Volume 1, pp. 428–431. [Google Scholar]
- Zhou, H.; Kassim, A.A.; Ranganath, S. A fast algorithm for detecting die extrusion defects in IC packages. Mach. Vis. Appl. 1998, 11, 37–41. [Google Scholar] [CrossRef]
- Kumar, A.; Pang, G.K. Defect detection in textured materials using Gabor filters. IEEE Trans. Ind. Appl. 2002, 38, 425–440. [Google Scholar] [CrossRef]
- Habib, H.A.; Yousaf, M.H.; Mohibullah, M. Modified laws energy descriptor for inspection of ceramic tiles. In Proceedings of the National Conference on Emerging Technologies, Kyoto, Japan, 7–8 October 2004; Volume 34, pp. 138–140. [Google Scholar]
- Zhou, X.; Wang, Y.; Xiao, C.; Zhu, Q.; Lu, X.; Zhang, H.; Ge, J.; Zhao, H. Automated visual inspection of glass bottle bottom with saliency detection and template matching. IEEE Trans. Instrum. Meas. 2019, 68, 4253–4267. [Google Scholar] [CrossRef]
- Tsai, D.M.; Hsieh, C.Y. Automated surface inspection for directional textures. Image Vis. Comput. 1999, 18, 49–62. [Google Scholar] [CrossRef]
- Tsai, D.M.; Huang, T.Y. Automated surface inspection for statistical textures. Image Vis. Comput. 2003, 21, 307–323. [Google Scholar] [CrossRef]
- Chan, C.H.; Pang, G.K. Fabric defect detection by Fourier analysis. IEEE Trans. Ind. Appl. 2000, 36, 1267–1276. [Google Scholar] [CrossRef]
- D’Astous, F.; Jernigan, M. Texture discrimination based on detailed measures of the power spectrum. In Proceedings of the International Conference on Pattern Recognition, Montreal, QC, Canada, 30 July–2 August 1984; Volume 3, pp. 83–86. [Google Scholar]
- Hoffer, L.M.; Francini, F.; Tiribilli, B.; Longobardi, G. Neural networks for the optical recognition of defects in cloth. Opt. Eng. 1996, 35, 3183–3190. [Google Scholar] [CrossRef]
- Castellini, C.; Francini, F.; Longobardi, G.; Tiribilli, B.; Sansoni, P. On-line textile quality control using optical Fourier transforms. Opt. Lasers Eng. 1996, 24, 19–32. [Google Scholar] [CrossRef]
- Ciamberlini, C.; Francini, F.; Longobardi, G.; Poggi, P.; Sansoni, P.; Tiribilli, B. Weaving defect detection by Fourier imaging. In Vision Systems: Applications; Kammenos, P.A., Nickolay, B., Eds.; International Society for Optics and Photonics (SPIE): Bellingham, WA, USA, 1996; Volume 2786, pp. 9–18. [Google Scholar] [CrossRef]
- Campbell, J.G.; Hashim, A.A.; McGinnity, T.M.; Lunney, T.F. Flaw detection in woven textiles by neural network. In Proceedings of the 5th Irish Neural Networks Conference, Maynooth, Ireland, 11–13 September 1995; pp. 92–99. [Google Scholar]
- Campbell, J.; Hashim, A.; Murtagh, F. Flaw Detection in Woven Textiles Using Space-Dependent Fourier Transform; University of Ulster: Princeton, NJ, USA, 1997. [Google Scholar]
- Gai, S. New banknote defect detection algorithm using quaternion wavelet transform. Neurocomputing 2016, 196, 133–139. [Google Scholar] [CrossRef]
- Hosseini Ravandi, S.A.; Toriumi, K. Fourier transform analysis of plain weave fabric appearance. Text. Res. J. 1995, 65, 676–683. [Google Scholar] [CrossRef]
- Xu, B. Identifying fabric structures with fast Fourier transform techniques. Text. Res. J. 1996, 66, 496–506. [Google Scholar]
- Chen, P.W.; Liang, T.C.; Yau, H.F.; Sun, W.L.; Wang, N.C.; Lin, H.C.; Lien, R.C. Classifying textile faults with a back-propagation neural network using power spectra. Text. Res. J. 1998, 68, 121–126. [Google Scholar] [CrossRef]
- Escofet, J.; Garcia-Verela, M.S.M.; Abril, H.C.; Torrecilla, E. Inspection of fabric resistance to abrasion by Fourier analysis. In Proceedings of the Optics in Computing’98. International Society for Optics and Photonics, Bruges, Belgium, 22 May 1998; Volume 3490, pp. 207–210. [Google Scholar]
- Mak, K.L.; Peng, P. An automated inspection system for textile fabrics based on Gabor filters. Rob. Comput. Integr. Manuf. 2008, 24, 359–369. [Google Scholar] [CrossRef]
- Bodnarova, A.; Bennamoun, M.; Latham, S. Optimal Gabor filters for textile flaw detection. Pattern Recognit. 2002, 35, 2973–2991. [Google Scholar] [CrossRef]
- Turner, M.R. Texture discrimination by Gabor functions. Biol. Cybern. 1986, 55, 71–82. [Google Scholar]
- Clark, M.; Bovik, A.C.; Geisler, W.S. Texture segmentation using Gabor modulation/demodulation. Pattern Recognit. Lett. 1987, 6, 261–267. [Google Scholar] [CrossRef]
- Escofet, J.; Navarro, R.B.; Millan, M.S.; Pladellorens, J.M. Detection of local defects in textile webs using Gabor filters. Opt. Eng. 1998, 37. [Google Scholar]
- Wiltschi, K.; Pinz, A.; Lindeberg, T. An automatic assessment scheme for steel quality inspection. Mach. Vis. Appl. 2000, 12, 113–128. [Google Scholar] [CrossRef]
- Kumar, A.; Pang, G.K. Fabric defect segmentation using multichannel blob detectors. Opt. Eng. 2000, 39, 3176–3191. [Google Scholar]
- Tsa, D.M.; Wu, S.K. Automated surface inspection using Gabor filters. Int. J. Adv. Manuf. Technol. 2000, 16, 474–482. [Google Scholar] [CrossRef][Green Version]
- Bennamoun, M.; Bodnarova, A. Digital image processing techniques for automatic textile quality control. Syst. Anal. Model. Simul. 2003, 43, 1581–1614. [Google Scholar] [CrossRef]
- Tsai, D.M.; Lin, C.P.; Huang, K.T. Defect detection in coloured texture surfaces using Gabor filters. Imaging Sci. J. 2005, 53, 27–37. [Google Scholar] [CrossRef]
- Bodnarova, A.; Bennamoun, M.; Latham, S.J. A constrained minimisation approach to optimise Gabor filters for detecting flaws in woven textiles. In Proceedings of the 2000 IEEE International Conference on Acoustics, Speech, and Signal Processing, Istanbul, Turkey, 5–9 June 2000; pp. 3606–3609. [Google Scholar]
- Hu, G.H. Optimal ring Gabor filter design for texture defect detection using a simulated annealing algorithm. In Proceedings of the 2014 International Conference on Information Science, Electronics and Electrical Engineering, Sapporo, Japan, 26–28 April 2014; pp. 860–864. [Google Scholar]
- Jasper, W.J.; Garnier, S.J.; Potlapalli, H. Texture characterization and defect detection using adaptive wavelets. Opt. Eng. 1996, 35. [Google Scholar] [CrossRef]
- Kim, S.; Lee, M.H.; Woo, K.B. Wavelet analysis to fabric defects detection in weaving processes. In Proceedings of the IEEE International Symposium on Industrial Electronics (Cat. No. 99TH8465), Bled, Slovenia, 12–16 July 1999; pp. 1406–1409. [Google Scholar]
- Sari-Sarraf, H.; Goddard, J.S. Vision system for on-loom fabric inspection. In Proceedings of the 1998 IEEE Annual Textile, Fiber and Film Industry Technical Conference (Cat. No. 98CH36246), Charlotte, NC, USA, 5–7 May 1998; pp. 1–8. [Google Scholar]
- Tsai, D.M.; Hsiao, B. Automatic surface inspection using wavelet reconstruction. Pattern Recognit. 2001, 34, 1285–1305. [Google Scholar] [CrossRef]
- Ralló, M.; Millán, M.; Escofet, J.; Navarro, R. Wavelet based techniques for textile inspection. Opt. Eng 2003, 26, 838–844. [Google Scholar]
- Yang, X.; Pang, G.; Yung, N. Fabric defect classification using wavelet frames and minimum classification error training. In Proceedings of the Conference Record of the 2002 IEEE Industry Applications Conference (Cat. No. 02CH37344), Pittsburgh, PA, USA, 13–18 October 2002; pp. 290–296. [Google Scholar]
- Mandriota, C.; Nitti, M.; Ancona, N.; Stella, E.; Distante, A. Filter-based feature selection for rail defect detection. Mach. Vis. Appl. 2004, 15, 179–185. [Google Scholar] [CrossRef]
- Scharcanski, J. Stochastic texture analysis for monitoring stochastic processes in industry. Pattern Recognit. Lett. 2005, 26, 1701–1709. [Google Scholar] [CrossRef]
- Yang, X.; Pang, G.; Yung, N. Robust fabric defect detection and classification using multiple adaptive wavelets. IEE Proc.-Vis. Image Signal Process. 2005, 152, 715–723. [Google Scholar] [CrossRef]
- Liu, J.J.; MacGregor, J.F. Estimation and monitoring of product aesthetics: Application to manufacturing of “engineered stone” countertops. Mach. Vis. Appl. 2006, 16, 374. [Google Scholar] [CrossRef]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Mufti, M.; Vachtsevanos, G. Automated fault detection and identification using a fuzzy-wavelet analysis technique. In Proceedings of the Conference Record AUTOTESTCON’95.’Systems Readiness: Test Technology for the 21st Century’, Atlanta, GA, USA, 8–10 August 1995; pp. 169–175. [Google Scholar]
- Lambert, G.; Bock, F. Wavelet methods for texture defect detection. In Proceedings of the International Conference on Image Processing, Santa Barbara, CA, USA, 26–29 October 1997; pp. 201–204. [Google Scholar]
- Tsai, D.M.; Chiang, C.H. Automatic band selection for wavelet reconstruction in the application of defect detection. Image Vis. Comput. 2003, 21, 413–431. [Google Scholar] [CrossRef]
- Han, Y.; Shi, P. An adaptive level-selecting wavelet transform for texture defect detection. Image Vis. Comput. 2007, 25, 1239–1248. [Google Scholar] [CrossRef]
- Sari-Sarraf, H.; Goddard, J. Robust defect segmentation in woven fabrics. In Proceedings of the 1998 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (Cat. No. 98CB36231), Santa Barbara, CA, USA, 25 June 1998; pp. 938–944. [Google Scholar]
- Yang, X.; Pang, G.; Yung, N. Discriminative training approaches to fabric defect classification based on wavelet transform. Pattern Recognit. 2004, 37, 889–899. [Google Scholar] [CrossRef]
- Lin, H.D. Automated visual inspection of ripple defects using wavelet characteristic based multivariate statistical approach. Image Vis. Comput. 2007, 25, 1785–1801. [Google Scholar] [CrossRef]
- Zhu, Q.; Wu, M.; Li, J.; Deng, D. Fabric defect detection via small scale over-complete basis set. Text. Res. J. 2014, 84, 1634–1649. [Google Scholar] [CrossRef]
- Campbell, J.G.; Murtagh, F.D. Automatic visual inspection of woven textiles using a two-stage defect detector. Opt. Eng. 1998, 37, 2536–2542. [Google Scholar] [CrossRef]
- Mandelbrot, B.B. The Fractal Geometry of Nature; WH Freeman: New York, NY, USA, 1983; Volume 173. [Google Scholar]
- Conci, A.; Proença, C.B. A fractal image analysis system for fabric inspection based on a box-counting method. Comput. Netw. ISDN Syst. 1998, 30, 1887–1895. [Google Scholar] [CrossRef]
- Conci, A.; Proença, C.B. A System for Real-Time Fabric Inspection and Industrial Decision. In Proceedings of the 14th International Conference on Software Engineering and Knowledge Engineering, Ischia, Italy, 15–19 July 2002; pp. 707–714. [Google Scholar]
- Ohanian, P.P.; Dubes, R.C. Performance evaluation for four classes of textural features. Pattern Recognit. 1992, 25, 819–833. [Google Scholar] [CrossRef]
- Kindermann, R. Markov random fields and their applications. Am. Math. Soc. 1980, 97, 3923–3931. [Google Scholar]
- Wilson, R.; Li, C.T. A class of discrete multiresolution random fields and its application to image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 42–56. [Google Scholar] [CrossRef]
- Marroquin, J.L.; Santana, E.A.; Botello, S. Hidden Markov measure field models for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 1380–1387. [Google Scholar] [CrossRef]
- Deng, H.; Clausi, D.A. Gaussian MRF rotation-invariant features for image classification. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 951–955. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J. Texture classification using multiresolution Markov random field models. Pattern Recognit. Lett. 1999, 20, 171–182. [Google Scholar] [CrossRef]
- Cohen, F.S.; Fan, Z.; Attali, S. Automated inspection of textile fabrics using textural models. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 8, 803–808. [Google Scholar] [CrossRef]
- Ozdemir, S.; Ercil, A. Markov random fields and Karhunen-Loeve transforms for defect inspection of textile products. In Proceedings of the 1996 IEEE Conference on Emerging Technologies and Factory Automation, Kauai, HI, USA, 18–21 November 1996; pp. 697–703. [Google Scholar] [CrossRef]
- Chan, H.Y.; Raju, C.; Sari-Sarraf, H.; Hequet, E.F. A general approach to defect detection in textured materials using a wavelet domain model and level sets. In Wavelet Applications in Industrial Processing III; Truchetet, F., Laligant, O., Eds.; International Society for Optics and Photonics; Society of Photographic Instrumentation Engineers (SPIE): Bellingham, WA, USA, 2005; Volume 6001, pp. 102–107. [Google Scholar] [CrossRef]
- Nguyen, H.; Nguyen, L.; Sidorov, D.N. A robust approach for road pavement defects detection and classification. J. Comput. Eng. Math. 2016, 3, 40–52. [Google Scholar] [CrossRef]
- Baykut, A.; Atalay, A.; Erçil, A.; Güler, M. Real-time defect inspection of textured surfaces. Real-Time Imaging 2000, 6, 17–27. [Google Scholar] [CrossRef]
- Pernkopf, F. 3D surface inspection using coupled HMMs. In Proceedings of the 17th International Conference on Pattern Recognition, Cambridge, UK, 26 August 2004; pp. 223–226. [Google Scholar]
- Moradi, S.; Zayed, T. Real-time defect detection in sewer closed circuit television inspection videos. Pipelines 2017, 295–307. [Google Scholar]
- Xie, X.; Mirmehdi, M. TEXEMS: Texture Exemplars for Defect Detection on Random Textured Surfaces. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1454–1464. [Google Scholar] [CrossRef]
- Limas Serafim, A.F. Multiresolution pyramids for segmentation of natural images based on autoregressive models: Application to calf leather classification. In Proceedings of the 1991 International Conference on Industrial Electronics, Control and Instrumentation, Kobe, Japan, 28 October–1 November 1991; pp. 1842–1847. [Google Scholar] [CrossRef]
- Limas Serafim, A.F. Segmentation of natural images based on multiresolution pyramids linking of the parameters of an autoregressive rotation invariant model. Application to leather defects detection. In Proceedings of the 11th IAPR International Conference on Pattern Recognition, The Hague, The Netherlands, 30 August–3 September 1992; pp. 41–44. [Google Scholar] [CrossRef]
- Basu, M.; Lin, Z. Multi-scale modeling of textures. In Proceedings of the 11th IAPR International Conference on Pattern Recognition, The Hague, The Netherlands, 30 August–3 September 1992; pp. 421–424. [Google Scholar] [CrossRef]
- Hajimowlana, S.H.; Muscedere, R.; Jullien, G.A.; Roberts, J.W. 1D autoregressive modeling for defect detection in web inspection systems. In Proceedings of the 1998 Midwest Symposium on Circuits and Systems (Cat. No. 98CB36268), Notre Dame, IN, USA, 9–12 August 1998; pp. 318–321. [Google Scholar] [CrossRef]
- Zhang, Y.; Xing, Y.; Gong, Y.; Jin, D.; Li, H.; Liu, F. A variable-level automated defect identification model based on machine learning. Soft Comput. 2020, 24, 1045–1061. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, J.; Tian, Y.; Chen, H.; Sun, H.; Liu, K. A Simple Guidance Template-Based Defect Detection Method for Strip Steel Surfaces. IEEE Trans. Ind. Inf. 2018, 15, 2798–2809. [Google Scholar] [CrossRef]
- Zhou, S.; Wu, S.; Liu, H.; Lu, Y.; Hu, N. Double low-rank and sparse decomposition for surface defect segmentation of steel sheet. Appl. Sci. 2018, 8, 1628. [Google Scholar] [CrossRef]
- Yang, J.; Li, X.; Xu, J.; Cao, Y.; Zhang, Y.; Wang, L.; Jiang, S. Development of an optical defect inspection algorithm based on an active contour model for large steel roller surfaces. Appl. Opt. 2018, 57, 2490–2498. [Google Scholar] [CrossRef]
- Silvén, O.; Niskanen, M.; Kauppinen, H. Wood inspection with non-supervised clustering. Mach. Vis. Appl. 2003, 13, 275–285. [Google Scholar] [CrossRef]
- Swain, M.J.; Ballard, D.H. Color indexing. Int. J. Comput. Vis. 1991, 7, 11–32. [Google Scholar] [CrossRef]
- Thai, B.; Healey, G. Modeling and classifying symmetries using a multiscale opponent color representation. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 1224–1235. [Google Scholar] [CrossRef]
- Pietikäinen, M.; Mäenpää, T.; Viertola, J. Color texture classification with color histograms and local binary patterns. In Proceedings of the Workshop on Texture Analysis in Machine Vision, Florence, Italy, 7–13 October 2002. [Google Scholar]
- Xie, X.; Mirmehdi, M.; Thomas, B. Colour tonality inspection using eigenspace features. Mach. Vis. Appl. 2006, 16, 364–373. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef]
- Çelik, H.; Dülger, L.; Topalbekiroğlu, M. Development of a machine vision system: Real-time fabric defect detection and classification with neural networks. J. Text Inst. 2014, 105, 575–585. [Google Scholar] [CrossRef]
- Yang, S.W.; Lin, C.S.; Lin, S.K.; Chiang, H.T. Automatic defect recognition of TFT array process using gray level co-occurrence matrix. Optik 2014, 125, 2671–2676. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikäinen, M.; Mäenpää, T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Germany, D. Tilda Textile Texture Database. 1996. Available online: https://lmb.informatik.uni-freiburg.de/resources/datasets/tilda.en.html (accessed on 9 February 2020).
- Matheron, G.; Serra, J. The birth of mathematical morphology. In Proceedings of the 6th International Symp. Mathematical Morphology, Sydney, Australia, 3–5 April 2002; pp. 1–16. [Google Scholar]
- Daugman, J.G. Two-dimensional spectral analysis of cortical receptive field profiles. Vis. Res. 1980, 20, 847–856. [Google Scholar] [CrossRef]
- Yang, X.; Pang, G.; Yung, N. Discriminative fabric defect detection using adaptive wavelets. Opt. Eng. 2002, 41, 3116–3125. [Google Scholar] [CrossRef]
- Hu, B.; Wang, J.; Huang, X. Fabric defect detection based on multiple fractal features and support vector data description. Eng. Appl. Artif. Intell. 2009, 22, 224–235. [Google Scholar] [CrossRef]
- Kaneko, H. A generalized fractal dimension and its application to texture analysis-fractal matrix model. In Proceedings of the International Conference on Acoustics, Speech, and Signal Processing, Glasgow, UK, 23–26 May 1989; pp. 1711–1714. [Google Scholar]
- Trygve, R. Brodatz Texture Database. 2010. Available online: http://www.ux.uis.no/~tranden/brodatz.html (accessed on 9 February 2020).
- Kasparis, T.; Tzannes, N.; Bassiouni, M.; Chen, Q. Texture description using fractal and energy features. Comput. Electr. Eng. 1995, 21, 21–32. [Google Scholar] [CrossRef]
- Xi, J.; Shentu, L.; Hu, J.; Li, M. Automated surface inspection for steel products using computer vision approach. Appl. Opt. 2017, 56, 184–192. [Google Scholar] [CrossRef]
- Chaudhuri, B.B.; Sarkar, N. Texture segmentation using fractal dimension. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 72–77. [Google Scholar] [CrossRef]
- Pernkopf, F. Detection of surface defects on raw steel blocks using Bayesian network classifiers. Pattern Anal. Appl. 2004, 7, 333–342. [Google Scholar] [CrossRef]
- López, F.; Valiente, J.M.; Baldrich, R.; Vanrell, M. Fast Surface Grading Using Color Statistics in the CIE Lab Space. In Pattern Recognition and Image Analysis; Marques, J.S., Pérez de la Blanca, N., Pina, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 666–673. [Google Scholar]
- López, F.; Valiente, J.M.; Prats, J.M. Surface Grading Using Soft Colour-Texture Descriptors. In Progress in Pattern Recognition, Image Analysis and Applications; Sanfeliu, A., Cortés, M.L., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 13–23. [Google Scholar]
- Stojanovic, R.; Mitropulos, P.; Koulamas, C.; Karayiannis, Y.; Koubias, S.; Papadopoulos, G. Real-Time Vision-Based System for Textile Fabric Inspection. Real-Time Imaging 2001, 7, 507–518. [Google Scholar] [CrossRef]
- Kuo, C.F.J.; Lee, C.J.; Tsai, C.C. Using a neural network to identify fabric defects in dynamic cloth inspection. Text. Res. J. 2003, 73, 238–244. [Google Scholar] [CrossRef]
- Kuo, C.F.J.; Lee, C.J. A back-propagation neural network for recognizing fabric defects. Text. Res. J. 2003, 73, 147–151. [Google Scholar] [CrossRef]
- Huang, C.C.; Chen, I.C. Neural-fuzzy classification for fabric defects. Text. Res. J. 2001, 71, 220–224. [Google Scholar] [CrossRef]
- Yin, Y.; Zhang, K.; Lu, W. Textile flaw classification by wavelet reconstruction and BP neural network. In International Symposium on Neural Networks; Springer: Berlin/Heidelberg, Germany, 2009; pp. 694–701. [Google Scholar]
- Zhang, Y.; Lu, Z.; Li, J. Fabric defect classification using radial basis function network. Pattern Recognit. Lett. 2010, 31, 2033–2042. [Google Scholar] [CrossRef]
- Karayiannis, Y.A.; Stojanovic, R.; Mitropoulos, P.; Koulamas, C.; Stouraitis, T.; Koubias, S.; Papadopoulos, G. Defect detection and classification on web textile fabric using multiresolution decomposition and neural networks. In Proceedings of the ICECS ’99, 6th IEEE International Conference on Electronics, Circuits and Systems (Cat. No.99EX357), Pafos, Cyprus, 5–8 September 1999; pp. 765–768. [Google Scholar] [CrossRef]
- Kumar, A.; Shen, H.C. Texture inspection for defects using neural networks and support vector machines. In Proceedings of the International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, W.; Pan, J. Deformable Patterned Fabric Defect Detection With Fisher Criterion-Based Deep Learning. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1256–1264. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, M.; Zheng, P.; Yang, H.; Zou, J. A smart surface inspection system using faster R-CNN in cloud-edge computing environment. Adv. Eng. Inf. 2020, 43, 101037. [Google Scholar] [CrossRef]
- Liu, Y.T.; Yang, Y.N.; Chao, W.; Xu, X.Y.; Zhang, T. Research on Surface Defect Detection Based on Semantic Segmentation. DEStech Trans. Comput. Sci. Eng. 2019. [Google Scholar] [CrossRef]
- Weimer, D.; Scholz-Reiter, B.; Shpitalni, M. Design of deep convolutional neural network architectures for automated feature extraction in industrial inspection. CIRP Ann. 2016, 65, 417–420. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, C. Automated vision system for fabric defect inspection using Gabor filters and PCNN. SpringerPlus 2016, 5, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Park, S.K.; Ma, Y.; Ala, R. A new automatic parameter setting method of a simplified PCNN for image segmentation. IEEE Trans. Neural Netw. 2011, 22, 880–892. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S.S.; Abraham, D.M.; Jahanshahi, M.R.; Iseley, T.; Starr, J. Automated defect classification in sewer closed circuit television inspections using deep convolutional neural networks. Autom. Constr. 2018, 91, 273–283. [Google Scholar] [CrossRef]
- Brackenbury, D.; Brilakis, I.; DeJong, M. Automated Defect Detection For Masonry Arch Bridges. In International Conference on Smart Infrastructure and Construction 2019 (ICSIC) Driving Data-Informed Decision-Making; ICE Publishing: London, UK, 2019; pp. 3–9. [Google Scholar]
- Sun, T.H.; Tien, F.C.; Tien, F.C.; Kuo, R.J. Automated thermal fuse inspection using machine vision and artificial neural networks. J. Intell. Manuf. 2016, 27, 639–651. [Google Scholar] [CrossRef]
- Sacco, C.; Radwan, A.B.; Harik, R.; Van Tooren, M. Automated Fiber Placement Defects: Automated Inspection and Characterization. In Proceedings of the SAMPE 2018 Conference and Exhibition, Long Beach, CA, USA, 21–24 May 2018. [Google Scholar]
- Yang, Y.; Pan, L.; Ma, J.; Yang, R.; Zhu, Y.; Yang, Y.; Zhang, L. A High-Performance Deep Learning Algorithm for the Automated Optical Inspection of Laser Welding. Appl. Sci. 2020, 10, 933. [Google Scholar] [CrossRef]
- Liu, Y.; Geng, J.; Su, Z.; Zhang, W.; Li, J. Real-time classification of steel strip surface defects based on deep CNNs. In Proceedings of 2018 Chinese Intelligent Systems Conference; Springer: Singapore, 2019; pp. 257–266. [Google Scholar]
- Li, J.; Su, Z.; Geng, J.; Yin, Y. Real-time detection of steel strip surface defects based on improved yolo detection network. IFAC-PapersOnLine 2018, 51, 76–81. [Google Scholar] [CrossRef]
- Song, L.; Lin, W.; Yang, Y.G.; Zhu, X.; Guo, Q.; Xi, J. Weak micro-scratch detection based on deep convolutional neural network. IEEE Access 2019, 7, 27547–27554. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, K.; Xu, J. Periodic Surface Defect Detection in Steel Plates Based on Deep Learning. Appl. Sci. 2019, 9, 3127. [Google Scholar] [CrossRef]
- He, D.; Xu, K.; Zhou, P. Defect detection of hot rolled steels with a new object detection framework called classification priority network. Comput. Ind. Eng. 2019, 128, 290–297. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Büyüköztürk, O. Deep learning-based crack damage detection using convolutional neural networks. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Ren, R.; Hung, T.; Tan, K.C. A generic deep-learning-based approach for automated surface inspection. IEEE Trans. Cybern. 2017, 48, 929–940. [Google Scholar] [CrossRef] [PubMed]
- Tao, X.; Zhang, D.; Ma, W.; Liu, X.; Xu, D. Automatic metallic surface defect detection and recognition with convolutional neural networks. Appl. Sci. 2018, 8, 1575. [Google Scholar] [CrossRef]
- Liong, S.T.; Gan, Y.; Huang, Y.C.; Yuan, C.A.; Chang, H.C. Automatic defect segmentation on leather with deep learning. arXiv 2019, arXiv:1903.12139. [Google Scholar]
- Tural, S.; Samet, R. Automated Defect Detection on Surface of Militarz Cartridges. J. Mod. Technol. Eng. 2019, 4, 178–189. [Google Scholar]
- Occhipinti, L.; Spoto, G.; Branciforte, M.; Doddo, F. Defects detection and characterization by using cellular neural networks. In Proceedings of the 2001 IEEE International Symposium on Circuits and Systems (Cat. No.01CH37196), Sydney, Australia, 6–9 May 2001; pp. 481–484. [Google Scholar] [CrossRef]
- Jain, A.K.; Duin, R.P.W.; Mao, J. Statistical pattern recognition: A review. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 4–37. [Google Scholar] [CrossRef]
- Pereira, R.F.; Medeiros, C.M.; Rebouças Filho, P.P. Goat leather quality classification using computer vision and machine learning. In Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]
- Markou, M.; Singh, S. Novelty detection: A review—part 1: Statistical approaches. Signal Process. 2003, 83, 2481–2497. [Google Scholar] [CrossRef]
- Markou, M.; Singh, S. Novelty detection: A review—part 2: Neural network based approaches. Signal Process. 2003, 83, 2499–2521. [Google Scholar] [CrossRef]
- Shipway, N.; Huthwaite, P.; Lowe, M.; Barden, T. Performance based modifications of random forest to perform automated defect detection for fluorescent penetrant inspection. J. Nondestr. Eval. 2019, 38, 37. [Google Scholar] [CrossRef]
- Schlegl, T.; Seeböck, P.; Waldstein, S.M.; Schmidt-Erfurth, U.; Langs, G. Unsupervised anomaly detection with generative adversarial networks to guide marker discovery. In International Conference on Information Processing in Medical Imaging; Springer: Berlin, Germany, 2017; pp. 146–157. [Google Scholar]
- Youkachen, S.; Ruchanurucks, M.; Phatrapomnant, T.; Kaneko, H. Defect segmentation of hot-rolled steel strip surface by using convolutional auto-encoder and conventional image processing. In Proceedings of the 2019 10th International Conference of Information and Communication Technology for Embedded Systems (IC-ICTES), Bangkok, Thailand, 25–27 March 2019; pp. 1–5. [Google Scholar]
- Zhao, Z.; Li, B.; Dong, R.; Zhao, P. A Surface Defect Detection Method Based on Positive Samples. In Pacific Rim International Conference on Artificial Intelligence; Springer: Berlin, Germany, 2018; pp. 473–481. [Google Scholar]
- Di, H.; Ke, X.; Peng, Z.; Dongdong, Z. Surface defect classification of steels with a new semi-supervised learning method. Opt. Lasers Eng. 2019, 117, 40–48. [Google Scholar] [CrossRef]
- Gururajan, A.; Hequet, E.F.; Sari-Sarraf, H. Objective evaluation of soil release in fabrics. Text. Res. J. 2008, 78, 782–795. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, Z.; Li, J. Fabric defect detection and classification using gabor filters and gaussian mixture model. In Asian Conference on Computer Vision; Springer: Berlin, Germany, 2009; pp. 635–644. [Google Scholar]
- Mei, S.; Yang, H.; Yin, Z. An unsupervised-learning-based approach for automated defect inspection on textured surfaces. IEEE Trans. Instrum. Meas. 2018, 67, 1266–1277. [Google Scholar] [CrossRef]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- Susan, S.; Sharma, M. Automatic texture defect detection using Gaussian mixture entropy modeling. Neurocomputing 2017, 239, 232–237. [Google Scholar] [CrossRef]
- Zhao, Z.Q.; Zheng, P.; Xu, S.T.; Wu, X. Object detection with deep learning: A review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Ma, Y.; Zhang, L.; Gao, R.X.; Wu, D. Deep learning for smart manufacturing: Methods and applications. J. Manuf. Syst. 2018, 48, 144–156. [Google Scholar] [CrossRef]
- Psuj, G. Multi-sensor data integration using deep learning for characterization of defects in steel elements. Sensors 2018, 18, 292. [Google Scholar] [CrossRef] [PubMed]
- Soukup, D.; Huber-Mörk, R. Convolutional neural networks for steel surface defect detection from photometric stereo images. In International Symposium on Visual Computing; Springer: Berlin, Germany, 2014; pp. 668–677. [Google Scholar]
- Tabernik, D.; Šela, S.; Skvarč, J.; Skočaj, D. Segmentation-based deep-learning approach for surface-defect detection. J. Intell. Manuf. 2020, 31, 759–776. [Google Scholar] [CrossRef]
- Gopalakrishnan, K.; Khaitan, S.K.; Choudhary, A.; Agrawal, A. Deep Convolutional Neural Networks with transfer learning for computer vision-based data-driven pavement distress detection. Constr. Build. Mater. 2017, 157, 322–330. [Google Scholar] [CrossRef]
- Lin, H.; Li, B.; Wang, X.; Shu, Y.; Niu, S. Automated defect inspection of LED chip using deep convolutional neural network. J. Intell. Manuf. 2019, 30, 2525–2534. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Suh, G.; Mahmoudkhani, S.; Büyüköztürk, O. Autonomous structural visual inspection using region-based deep learning for detecting multiple damage types. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 731–747. [Google Scholar] [CrossRef]
- Johnson, J.L.; Padgett, M.L. PCNN models and applications. IEEE Trans. Neural Netw. 1999, 10, 480–498. [Google Scholar] [CrossRef] [PubMed]
- Eckhorn, R.; Reitboeck, H.J.; Arndt, M.; Dicke, P. Feature linking via synchronization among distributed assemblies: Simulations of results from cat visual cortex. Neural Comput. 1990, 2, 293–307. [Google Scholar] [CrossRef]
- Yang, H.; Haist, T.; Gronle, M.; Osten, W. Realistic simulation of camera images of micro-scale defects for automated defect inspection. In Forum Bildverarbeitung 2016; KIT Scientific Publishing: Karlsruhe, Germany, 2016; Volume 84, p. 63. [Google Scholar]
- Edwards, C. Growing pains for deep learning. Commun. ACM 2015, 58, 14–16. [Google Scholar] [CrossRef]
- Crick, F. The recent excitement about neural networks. Nature 1989, 337, 129–132. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Approach | Method | Strengths | Weaknesses |
|---|---|---|---|
| Statistical | Histogram properties | Simplicity, invariant to translation and rotation. | Requires the assumption that the intensity of defective regions are separable. |
| Co-occurrence matrix | The spatial relation of extracted image pixels is complete and accurate. | Computation and memory requirements are relatively high. | |
| Local binary pattern | Gray invariance, can quickly extract discriminative features with rotation. | Highly sensitive to noise, scale change. | |
| Other gray level statistics | Suitable for low resolution images. | Low timeliness and no automatic threshold selection. | |
| Auto-correlation | Easy to use on textures that are repetitive in nature, such as textiles. | Unsuitable for random textures with irregularly arranged textural elements. | |
| Registration-based | Can mix different sensory images or acquired from different views or at different times. | Heavily depends on the keypoint detection algorithms or the similarity measurement strategies. | |
| Statistical | Primitive measurement | Simple, easy to understand and implement. | Sensitive to non-linear noises. |
| Edge features | Easy to realize and capable to extract some low-order features of the image. | Susceptible to noise and only suitable for images with low resolution. | |
| Skeleton representation | Built up from multiple statistical histogram analysis as a structure. Mixes their strengths. | Heavily depends on the applied statistical methods’ weaknesses. | |
| Morphological operations | Computationally simple and highly suitable for random or natural textures. | Only suitable for aperiodic defects. | |
| Filter | Spatial domain filtering | Spatial information extraction, possible to use for localization. | Computation and memory requirements scale heavily. Translation, expansion and rotation dependent. |
| Frequency domain analysis | Invariant to translation, expansion and rotation. | Difficult to realize non-interference when dealing with frequency-domain components related to background or defect. | |
| Joint spatial/spatial frequency | Can outperform space or frequency invariant based methods when the signal and noise overlap in both space and frequency domains. | High complexity. Hard to determine the optimal filter parameters and no rotation invariance. | |
| Model based | Fractal model | The overall information of images can be expressed by partial features. | Detection accuracy is unsatisfactory and have limitation on images without self-similar. |
| Random field model | Can be combined with statistical and spectral methods for segmentation applications to capture the local texture orientation information. | Cannot detect small defects. Not suitable for global texture analysis. Strong spatial constraint. | |
| Texem model | Potentially useful for image segmentation problems even on colored images. | Requires significantly large training dataset to train the model. | |
| Auto-regressive | High performance for texture related problems. | Tend to be limited to low-resolution images since memory and computation requirements grow with the size of the image. |
| Approach | Method | References |
|---|---|---|
| Statistical | Histogram properties | [6,7,8,9,10,11,12,13,14] |
| Co-occurrence matrix | [6,11,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30] | |
| Local binary pattern | [12,28,30,31,32,33,34,35,36,37,38] | |
| Other gray level statistics | [21,23,39,40,41,42,43,44] | |
| Auto-correlation | [23,45,46] | |
| Registration-based | [47,48,49,50] | |
| Structural | Primitive measurement | [51,52] |
| Edge features | [53] | |
| Skeleton representation | [54,55] | |
| Morphological operations | [51,52,56,57,58,59,60] | |
| Filter based | Spatial domain filtering | [26,61,62,63,64,65,66,67,68,69,70] |
| Frequency domain analysis | [22,71,72,73,74,75,76,77,78,79,80,81,82,83,84] | |
| Joint spatial/spatial frequency | [25,33,39,68,85,86,87,88,89,90,91,92,93,94,95,96,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111,112,113,114,115,116] | |
| Model based | Fractal model | [117,118,119,120] |
| Random field model | [26,121,122,123,124,125,126,127,128,129,130,131,132] | |
| Texem model | [133] | |
| Auto-regressive | [24,37,134,135,136,137,138,139,140,141] | |
| Color texture analysis for defect detection | [36,43,52,69,94,133,142] | |
| Approach | Method | References |
|---|---|---|
| Supervised classifiers | K-nearest neighbor | [25,73,90,103,161,162,163] |
| NNs & Deep learning | [6,29,40,59,62,65,75,78,85,99,109,164,165,166,167,168,169,170,171,172,173,174,175,176,177,178,179,180,181,182,183,184,185,186,187,188,189,190,191] | |
| SOM and SVM | [12,13,21,30,31,38,142,148,149,171,192,193,194,195] | |
| Unsupervised/semi- | Statistical/Novelty detection | [58,65,86,89,90,91,92,103,115,129,196,197,198,199,200,201,202] |
| supervised classifiers | Gaussian mixture model | [80,203,204,205] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Czimmermann, T.; Ciuti, G.; Milazzo, M.; Chiurazzi, M.; Roccella, S.; Oddo, C.M.; Dario, P. Visual-Based Defect Detection and Classification Approaches for Industrial Applications—A SURVEY. Sensors 2020, 20, 1459. https://doi.org/10.3390/s20051459
Czimmermann T, Ciuti G, Milazzo M, Chiurazzi M, Roccella S, Oddo CM, Dario P. Visual-Based Defect Detection and Classification Approaches for Industrial Applications—A SURVEY. Sensors. 2020; 20(5):1459. https://doi.org/10.3390/s20051459
Chicago/Turabian StyleCzimmermann, Tamás, Gastone Ciuti, Mario Milazzo, Marcello Chiurazzi, Stefano Roccella, Calogero Maria Oddo, and Paolo Dario. 2020. "Visual-Based Defect Detection and Classification Approaches for Industrial Applications—A SURVEY" Sensors 20, no. 5: 1459. https://doi.org/10.3390/s20051459
APA StyleCzimmermann, T., Ciuti, G., Milazzo, M., Chiurazzi, M., Roccella, S., Oddo, C. M., & Dario, P. (2020). Visual-Based Defect Detection and Classification Approaches for Industrial Applications—A SURVEY. Sensors, 20(5), 1459. https://doi.org/10.3390/s20051459