Analyzing the Satellite-Induced Code Bias Variation Characteristics for the BDS-3 Via a 40 m Dish Antenna


Abstract
1. Introduction
2. Development of the BeiDou System
3. MP Combinations
4. Data Collection
5. Results and Discussion
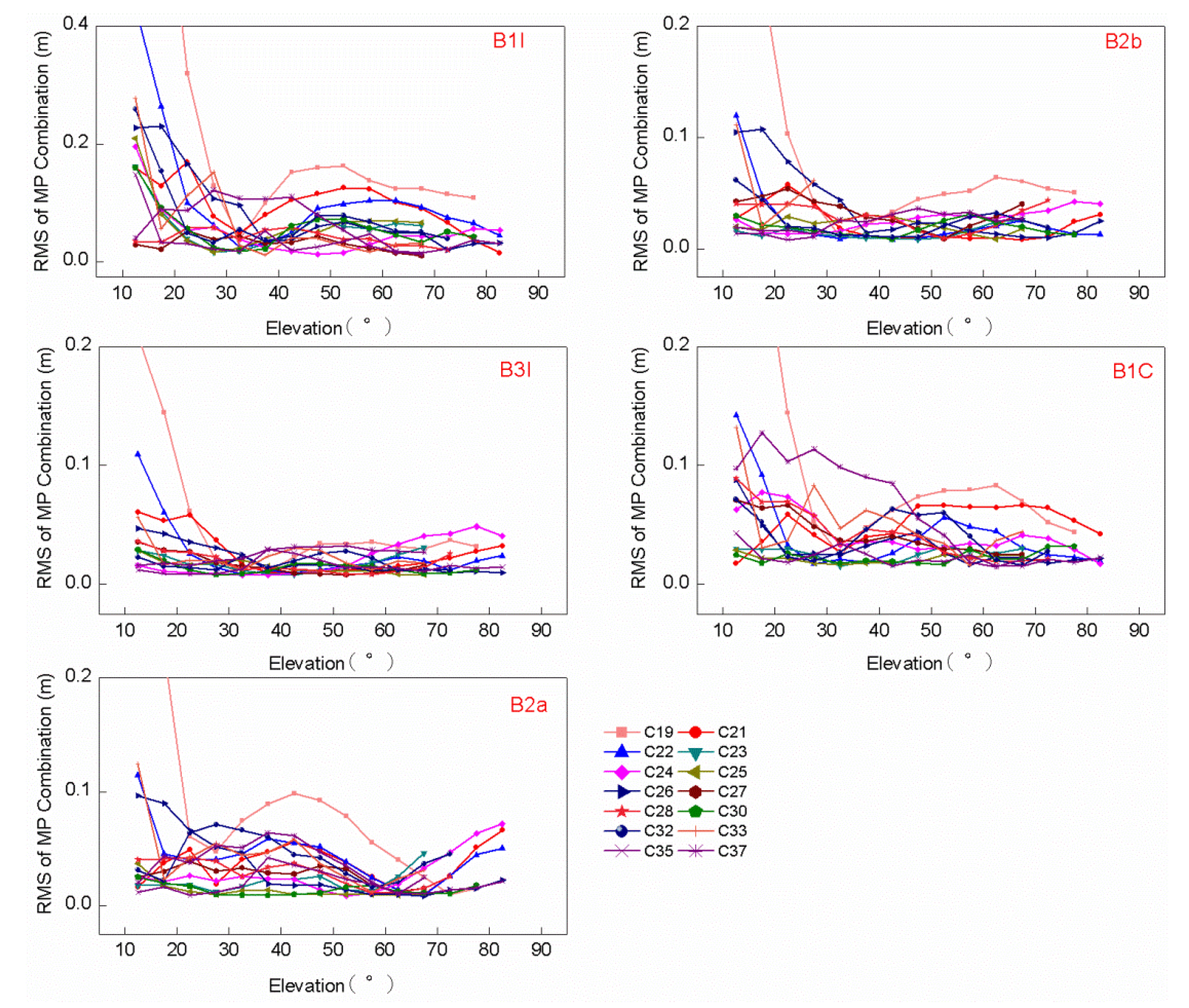
5.1. Elevation‑Dependent Code Bias Analysis
5.2. B1C Signal Components Code Bias Comparison
5.3. Comparison of the Code Bias with Normal Geodetic Antenna
6. Conclusions
- (1)
- The MP combination values of the BDS-3 satellite signals are small and concentrated in a range of about 0.1–0.2 m. The MP combination value differs from each frequency due to signal constructions. The MP combination value of the B1I and B3I frequency band has the largest and smallest RMS value, indicating the weakest and strongest anti-MP ability. In addition, the MP mitigation of the B2a and B2b frequency bands is better than that of the B1I and B1C frequency bands.
- (2)
- The satellite-induced code bias variation of BDS-3 demonstrates different performances on different frequency bands on different satellites, which was greatly reduced compared with that of the BDS-2 satellites. There is obvious elevation‑dependent code bias variation for the C28 B1I/B2b/B3I/B1C/B2a frequency bands, compared with other satellites. Similarly, the MP combination of B3I has an obvious elevation‑dependent variation in a range of 0.1 m for C21/C24/C27/C28/C37. The obvious elevation‑dependent variation of the B2a and B2b frequency bands also exists in most satellites with a range of 0.1 m, but the MP combination values of some satellites are asymmetric with respect to elevation, which is especially obvious for the B1I and BIC frequency bands with elevation‑dependent variations of 0.2 m, which indicates that the code bias variation is not uniquely related to elevation, especially for the B1I/BIC frequency bands.
- (3)
- The magnitude and variation of the MP combination value of each frequency band vary with elevation but do not always increase with a decrease in elevation. The code bias variation with elevations below 30° is the largest and most vulnerable to the interference of MP error, which can be considered in the stochastic model of GNSS data processing. The satellite-induced code variations of two manufacturers of BDS-3 satellites have no obvious differences at elevations larger than 25°.
- (4)
- The code bias of the B1C_data is slightly larger than that of the B1C_pilot, but the difference is small and can be neglected. What’s more, the MP combination time series have similar variations in B1C_data and B1C_pilot.
- (5)
- To explore the performance of the code bias for mass users with normal geodetic antennas, the Xia1 station from iGMAS was selected. Among the frequency bands of the C21/C24/C27/C28/C37 satellites, there still exists elevation‑dependent code bias in the frequency bands B1I/B1C/B3I/B2a/B2b of C21, B3I/B2a/B2b of C24 and B2b of C28 by comparing the MP combination values within the same observation arc, indicating that satellite-induced elevation‑dependent code bias may also appear in different antennas or receivers.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Amiri-Simkooei, A.R.; Jazaeri, S.; Zangeneh-Nejad, F.; Asgari, J. Role of stochastic model on GPS integer ambiguity resolution success rate. GPS Solut. 2016, 20, 51–61. [Google Scholar] [CrossRef]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef]
- Xu, H.; Cui, X.; Lu, M. Satellite-Induced Multipath Analysis on the Cause of BeiDou Code Pseudorange Bias. In Proceedings of the China Satellite Navigation Conference (CSNC), Shanghai, China, 23–25 May 2017. [Google Scholar]
- Hauschild, A.; Montenbruck, O.; Sleewaegen, J.M.; Huisman, L.; Teunissen, P.J.G. Characterization of compass M-1 signals. GPS Solut. 2012, 16, 117–126. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Gisbert, J.V.P.; Batzilis, N.; Risueño, G.L.; Rubio, J.A. GNSS Payload and Signal Characterization using a 3m Dish Antenna. In Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS), Nashville, Tennessee, 17–21 September 2012. [Google Scholar]
- Montenbruck, O.; Rizos, C.; Weber, R.; Weber, G.; Neilan, R.; Hugentobler, U. Getting a grip on multi-GNSS—The international GNSS service MGEX campaign. GPS World 2013, 24, 44–49. [Google Scholar]
- Li, M.; Qu, L.; Zhao, Q.; Guo, J.; Su, X.; Li, X. Precise Point Positioning with the BeiDou Navigation Satellite System. Sensors 2014, 14, 927–943. [Google Scholar] [CrossRef]
- Jiang, W.; Zhao, W.; Chen, H.; Liu, X.; An, X.; Chen, Q. Analysis of BDS Fractional Cycle Biases and PPP Ambiguity Resolution. Sensors 2019, 19, 4725. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X.; Guo, F. Ambiguity resolved precise point positioning with GPS and BeiDou. J. Geod. 2016, 91, 25–40. [Google Scholar]
- Lei, W.; Wu, G.; Tao, X.; Bian, L.; Wang, X. BDS satellite induced code multipath: Mitigation and assessment in new-generation IOV satellites. Adv. Space Res. 2017, 60, 2672–2679. [Google Scholar] [CrossRef]
- Xie, X.; Geng, T.; Zhao, Q.; Liu, J.; Wang, B. Performance of BDS-3: Measurement quality analysis, precise orbit and clock determination. Sensors 2017, 17, 1233. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Lu, C.; Wu, M.; Pan, L. A comprehensive analysis of satellite-induced code bias for BDS-3 satellites and signals. Adv. Space Res. 2017, 63, 2822–2835. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, M.; Liu, W.; Li, X.; Yu, S.; Lu, C.; Wickert, J. Initial assessment of the COMPASS/BeiDou-3: New-generation navigation signals. J. Geod. 2017, 91, 1225–1240. [Google Scholar] [CrossRef]
- Zhou, R.; Hu, Z.; Zhao, Q.; Li, P.; Wang, W.; He, C.; Cai, C.; Pan, Z. Elevation-dependent pseudorange variation characteristics analysis for the new-generation BeiDou satellite navigation system. GPS Solut. 2018, 22, 60. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Nie, L.; Wei, C.; Jia, S.; Jiang, S. Initial assessment of BeiDou‑3 global navigation satellite system: Signal quality, RTK and PPP. GPS Solut. 2019, 23, 111. [Google Scholar] [CrossRef]
- Xie, X.; Fang, R.; Geng, T.; Wang, G.; Zhao, Q.; Liu, J. Characterization of gnss signals tracked by the igmas network considering recent bds-3 satellites. Remote Sens. 2018, 10, 1736. [Google Scholar] [CrossRef]
- Zhang, B.; Jia, X.; Sun, F.; Xiao, K.; Dai, H. Performance of BeiDou-3 Satellites: Signal Quality Analysis and Precise Orbit Determination. Adv. Space Res. 2019, 64, 687–695. [Google Scholar] [CrossRef]
- CSNO. BeiDou Navigation Satellite System Signal in Space Interface Control Document—Open Service Signal; Version 2.1; China Satellite Navigation Office: Beijing, China, 2016.
- CSNO. Development of the BeiDou Navigation Satellite System; Version 3.0; China Satellite Navigation Office: Beijing, China, 2018.
- CSNO. Development of the BeiDou Navigation Satellite System; Version 4.0; China Satellite Navigation Office: Beijing, China, 2019.
- Xiao, W.; Liu, W.; Sun, G. Modernization milestone: BeiDou M2-S initial signal analysis. GPS Solut. 2016, 20, 125–133. [Google Scholar] [CrossRef]
- Yang, Y.; Gao, W.; Guo, S.; Mao, Y.; Yang, Y. Introduction to BeiDou-3 navigation satellite system. Navigation 2019, 66, 7–18. [Google Scholar] [CrossRef]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying, 4rd ed.; John Wiley & Sons: New York, NY, USA, 2015; pp. 401–474. [Google Scholar]
- Defraigne, P.; Bruyninx, C. On the link between GPS pseudorange noise and day-boundary discontinuities in geodetic time transfer solutions. GPS Solut. 2007, 11, 239–249. [Google Scholar] [CrossRef]
- Estey, L.H.; Meertens, C.M. Teqc: the multi-purpose toolkit for gps/glonass data. GPS Solut. 1999, 3, 42–49. [Google Scholar] [CrossRef]
- Silva, P.F.; Silva, J.S.; Peres, T.R. Galileo AltBOC signal processing for precise positioning Experimental results. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS), Nashville, Tennessee, 17–21 September 2012. [Google Scholar]
- Zhao, Q.; Wang, C.; Guo, J.; Wang, B.; Liu, J. Precise orbit and clock determination for beidou-3 experimental satellites with yaw attitude analysis. GPS Solut. 2017, 22, 4. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bands | Frequency (MHz) | Modulation Scheme | Code Rate (Mcps) | Compatible with Interoperable Signals | |
|---|---|---|---|---|---|
| B1I | 1561.098 | BPSK1 (2) QPSK2 (10) BPSK (10) | 2.046 | ||
| B2b | 1207.140 | 10.23 | Galileo E5b | ||
| B3I | 1268.520 | 10.23 | |||
| B1C | 1575.420 | B1C_pilot | QMBOC3 (6, 1) | 1.023 | GPS L1/Galileo E1 |
| B1C_data | BOC4 (1, 1) | ||||
| B2a | 1176.450 | QPSK (10) | 10.23 | GPS L5/ Galileo E5a | |
| Frequency Band | Notation | Formula |
|---|---|---|
| B1I | M1 | |
| B2b | M2 | |
| B3I | M3 | |
| B1C | M4 | |
| B2a | M5 |
| PRN | RMS (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Signal | C19 | C20 | C21 | C22 | C23 | C24 | C25 | C26 | |
| B1C_pilot | 0.083 | 0.036 | 0.046 | 0.042 | 0.026 | 0.058 | 0.032 | 0.041 | |
| B1C_data | 0.085 | 0.037 | 0.051 | 0.045 | 0.042 | 0.068 | 0.045 | 0.052 | |
| PRN | RMS (m) | ||||||||
| Signal | C27 | C28 | C30 | C32 | C33 | C35 | C37 | MEAN | |
| B1C_pilot | 0.043 | 0.050 | 0.033 | 0.035 | 0.046 | 0.036 | 0.066 | 0.045 | |
| B1C_data | 0.048 | 0.060 | 0.036 | 0.037 | 0.054 | 0.042 | 0.073 | 0.052 | |
| PRN | RMS of the Station with the 40 m Dish Antenna (m) | RMS of the Station with the Normal Geodetic Antenna (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| B1I | B2b | B3I | B1C | B2a | B1I | B2b | B3I | B1C | B2a | |
| 19 | 0.13 | 0.04 | 0.03 | 0.06 | 0.05 | 0.10 | 0.10 | 0.08 | 0.16 | 0.11 |
| 20 | 0.07 | 0.03 | 0.02 | 0.03 | 0.04 | 0.12 | 0.13 | 0.09 | 0.24 | 0.13 |
| 21 | 0.07 | 0.03 | 0.03 | 0.05 | 0.05 | 0.10 | 0.11 | 0.09 | 0.14 | 0.11 |
| 22 | 0.07 | 0.02 | 0.02 | 0.03 | 0.04 | 0.07 | 0.09 | 0.08 | 0.18 | 0.09 |
| 23 | 0.04 | 0.02 | 0.02 | 0.03 | 0.02 | 0.07 | 0.08 | 0.06 | 0.11 | 0.08 |
| 24 | 0.06 | 0.04 | 0.03 | 0.06 | 0.05 | 0.07 | 0.10 | 0.07 | 0.12 | 0.09 |
| 25 | 0.05 | 0.03 | 0.02 | 0.03 | 0.02 | 0.08 | 0.09 | 0.07 | 0.13 | 0.10 |
| 26 | 0.06 | 0.03 | 0.02 | 0.03 | 0.03 | 0.08 | 0.10 | 0.08 | 0.16 | 0.11 |
| 27 | 0.05 | 0.03 | 0.03 | 0.04 | 0.03 | 0.07 | 0.09 | 0.07 | 0.15 | 0.09 |
| 28 | 0.05 | 0.03 | 0.03 | 0.05 | 0.03 | 0.07 | 0.10 | 0.07 | 0.14 | 0.09 |
| 32 | 0.04 | 0.02 | 0.02 | 0.03 | 0.04 | 0.10 | 0.09 | 0.07 | 0.17 | 0.09 |
| 35 | 0.04 | - | 0.02 | 0.03 | 0.03 | 0.06 | 0.07 | 0.06 | 0.12 | 0.08 |
| 37 | 0.06 | 0.02 | 0.03 | 0.06 | 0.04 | 0.08 | 0.10 | 0.07 | 0.14 | 0.10 |
| MEAN | 0.06 | 0.03 | 0.02 | 0.04 | 0.03 | 0.08 | 0.09 | 0.07 | 0.15 | 0.09 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, J.; Tu, R.; Zhang, R.; Fan, L.; Zhang, P.; Han, J.; Lu, X. Analyzing the Satellite-Induced Code Bias Variation Characteristics for the BDS-3 Via a 40 m Dish Antenna. Sensors 2020, 20, 1339. https://doi.org/10.3390/s20051339
Hong J, Tu R, Zhang R, Fan L, Zhang P, Han J, Lu X. Analyzing the Satellite-Induced Code Bias Variation Characteristics for the BDS-3 Via a 40 m Dish Antenna. Sensors. 2020; 20(5):1339. https://doi.org/10.3390/s20051339
Chicago/Turabian StyleHong, Ju, Rui Tu, Rui Zhang, Lihong Fan, Pengfei Zhang, Junqiang Han, and Xiaochun Lu. 2020. "Analyzing the Satellite-Induced Code Bias Variation Characteristics for the BDS-3 Via a 40 m Dish Antenna" Sensors 20, no. 5: 1339. https://doi.org/10.3390/s20051339
APA StyleHong, J., Tu, R., Zhang, R., Fan, L., Zhang, P., Han, J., & Lu, X. (2020). Analyzing the Satellite-Induced Code Bias Variation Characteristics for the BDS-3 Via a 40 m Dish Antenna. Sensors, 20(5), 1339. https://doi.org/10.3390/s20051339