Use Of Smartphones for Ensuring Vulnerable Road User Safety through Path Prediction and Early Warning: An In-Depth Review of Capabilities, Limitations and Their Applications in Cooperative Intelligent Transport Systems

 ,
,  ,
,  and
and 
Abstract
1. Introduction
- A comprehensive review of the current state-of-the-art outdoor localization methods via smartphones is conducted.
- In addition, Pedestrians to Vehicles (P2V), Systems and methods for next move/step prediction are presented and analyzed
- Finally, a Pedestrian to Vehicles framework (P2V) is proposed.
2. State-of-the-Art Review in Vehicle to Pedestrians Systems
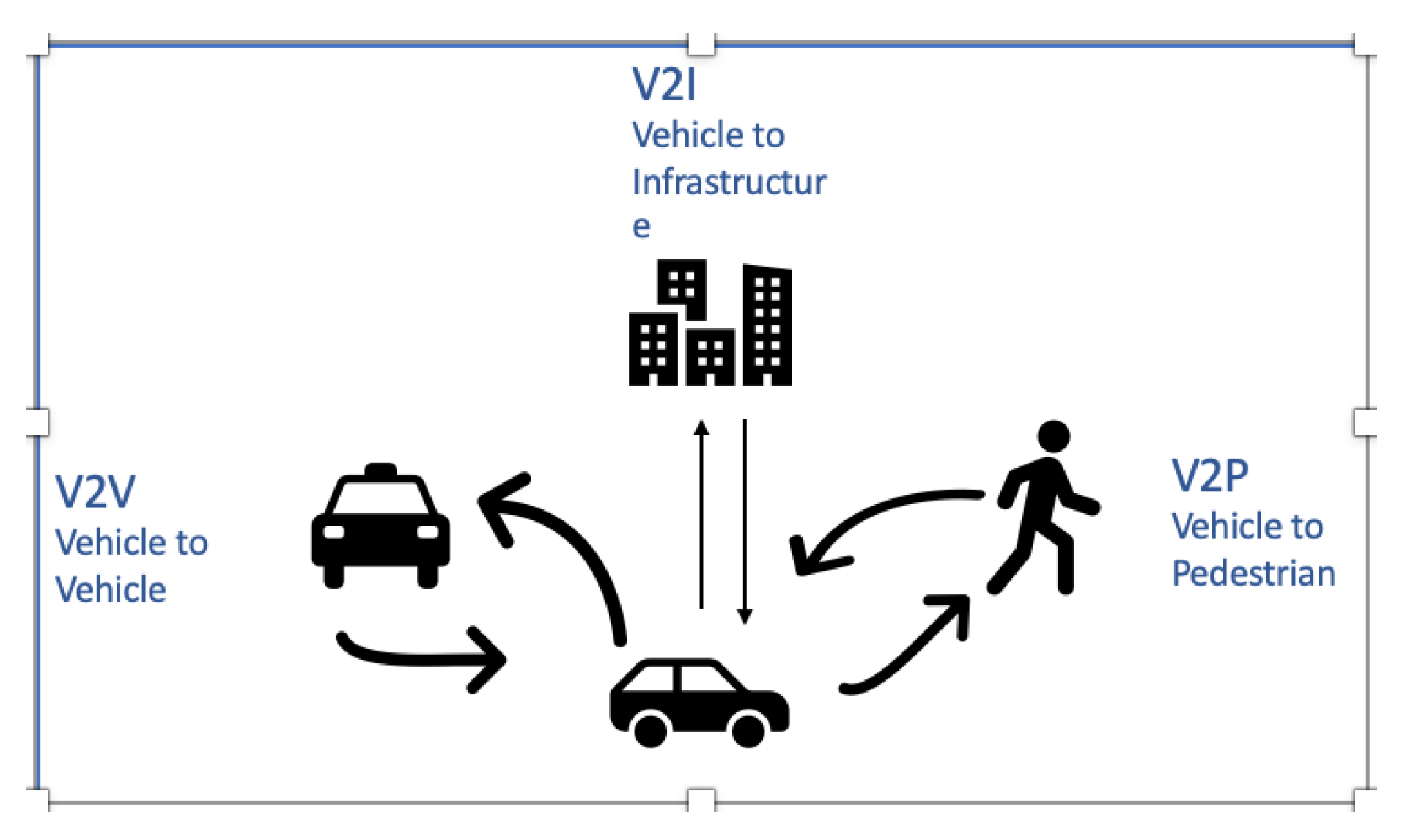
2.1. CITS 0verview
- Advanced Transportation Management Systems (ATMS): ATMSs aim to reduce traffic congestion instances especially in urban environments by optimizing the efficiency of usage of existing infrastructures. The optimum solutions that those systems try to find, both in urban freeways and surface streets, are based on the blending of state-of-the-art sensing, communication and data-processing technologies [9].
- Advanced Traveller Information System (ATIS): Travelers’ travel choices are mainly based on the knowledge that they gain from previous experience when traveling through areas of a city. With the use of Advanced Travel Information Systems (ATIS), which are designed to provide real-time information about available travel alternatives based on the current situation on the roads, travelers can take better travel choices. Using this technology, the experience of travelers is combined with descriptive, prescriptive and feedback information. Descriptive information consists mainly of data about prevailing conditions such as current or predicted travel times. This information can be provided either pre-trip or en-route through message signs or onboard devices. On the other hand, prescriptive information provides travelers with the “best” alternative, e.g., the route with the shortest distance, with the least total travel time or that is most eco-friendly [10,11].
- Advanced Vehicle Control and Safety System (AVCSS): These systems apply advanced technologies both in vehicles and roads to assist drivers to better control vehicles and to consequently reduce traffic accidents. The main services included in the AVCSS are longitudinal collision avoidance, lateral collision avoidance, intersection collision avoidance, vision enhancement for crash avoidance, safety readiness and pre-crash restraint deployment [12].
- Advanced Public Transportation System (APTS): Advanced public transportation systems (APTS) can be used for the improvement of both traffic efficiency of operation and the safety of public transportation users. Those systems combine transportation management and information technologies to public transit systems. Some of the most well-known APTSs are real-time passenger information systems, automatic vehicle location systems and bus arrival notification systems [9].
- Commercial Vehicle Operation (CVO): Intelligent Transport Systems (ITS) are used in commercial vehicle operations to help improve vehicle safety while at the same time can enhance the communication between motor carriers and respective regulatory agencies. Some applications of ITS are the following:
- −
- Safety information exchange systems: These systems can expedite the collection, distribution and retrieval of safety information.
- −
- Electronic screening systems: They can be used for automated inspection of vehicles.
- −
- Electronic credentialing systems: They can be used for electronic submission to systems, processing, approval, invoicing, payment of tolls and even tax filing [13].
2.2. Vehicle to Pedestrians (V2P) Systems—Developments
2.3. VRU Outdoor Localization via Smartphones
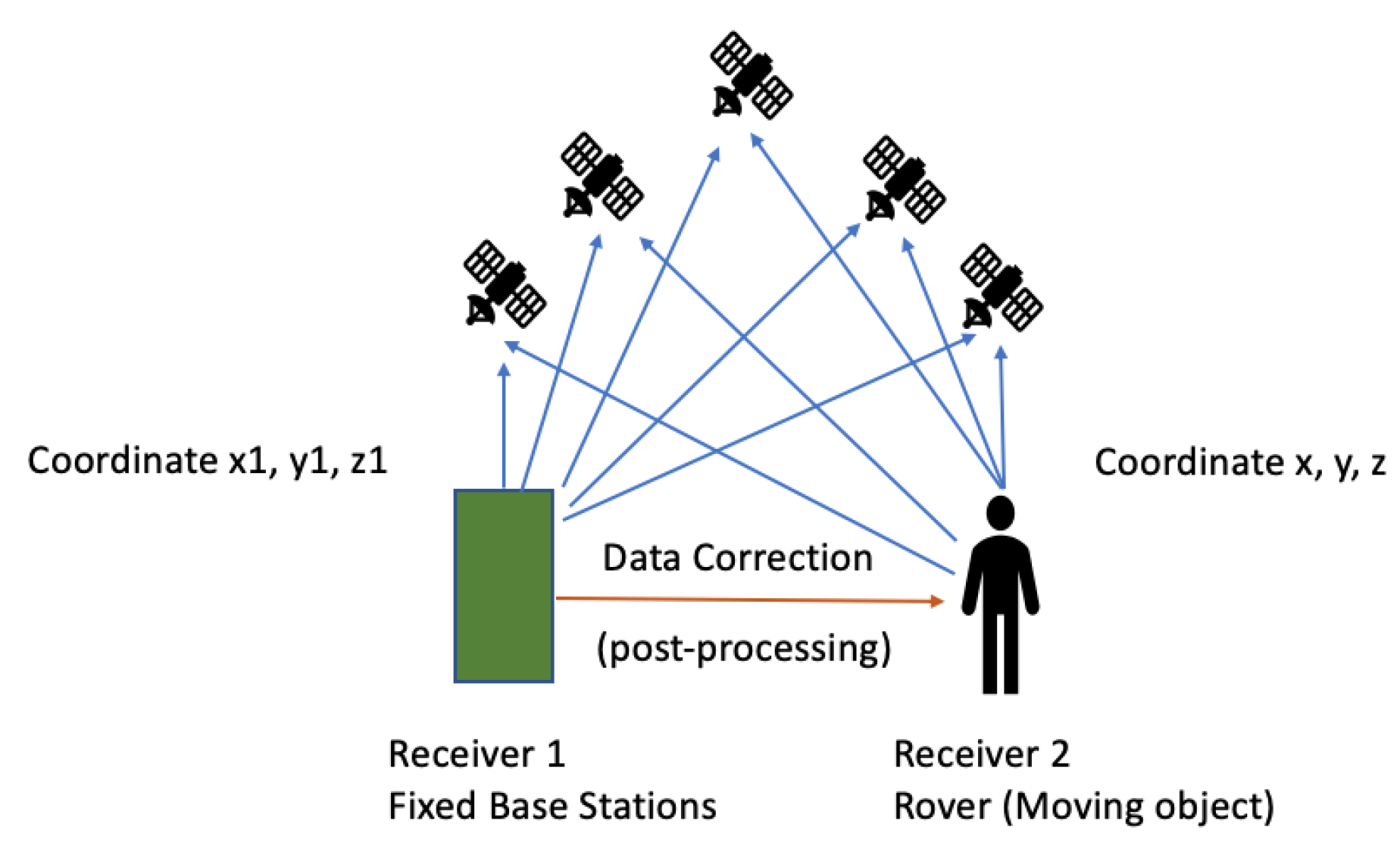
2.3.1. GPS/Assisted GPS/Differential GPS
2.3.2. Multi-Satellite Systems
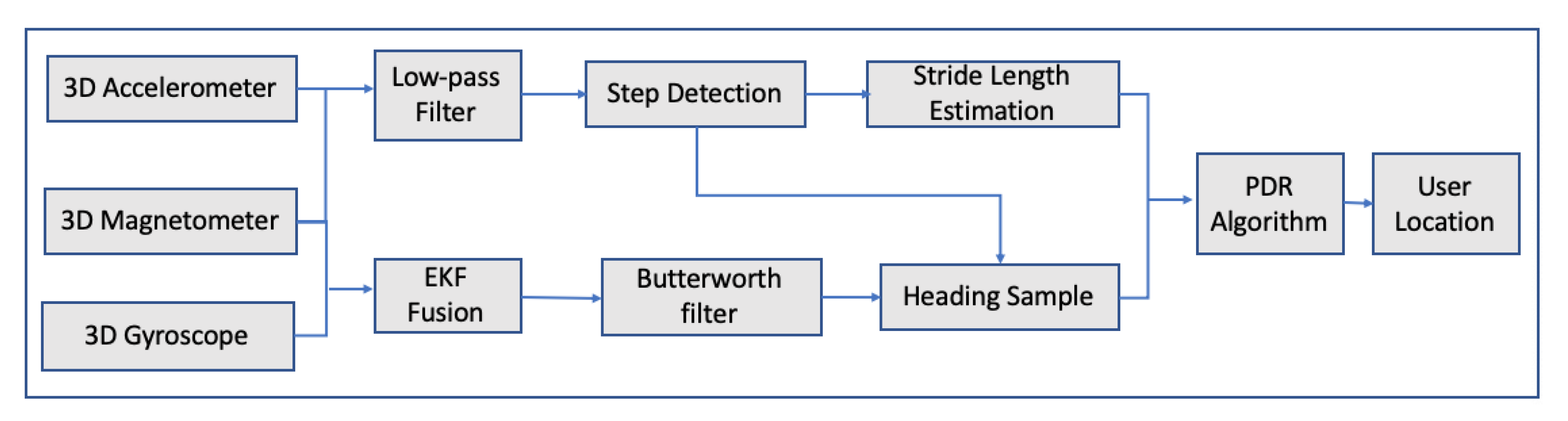
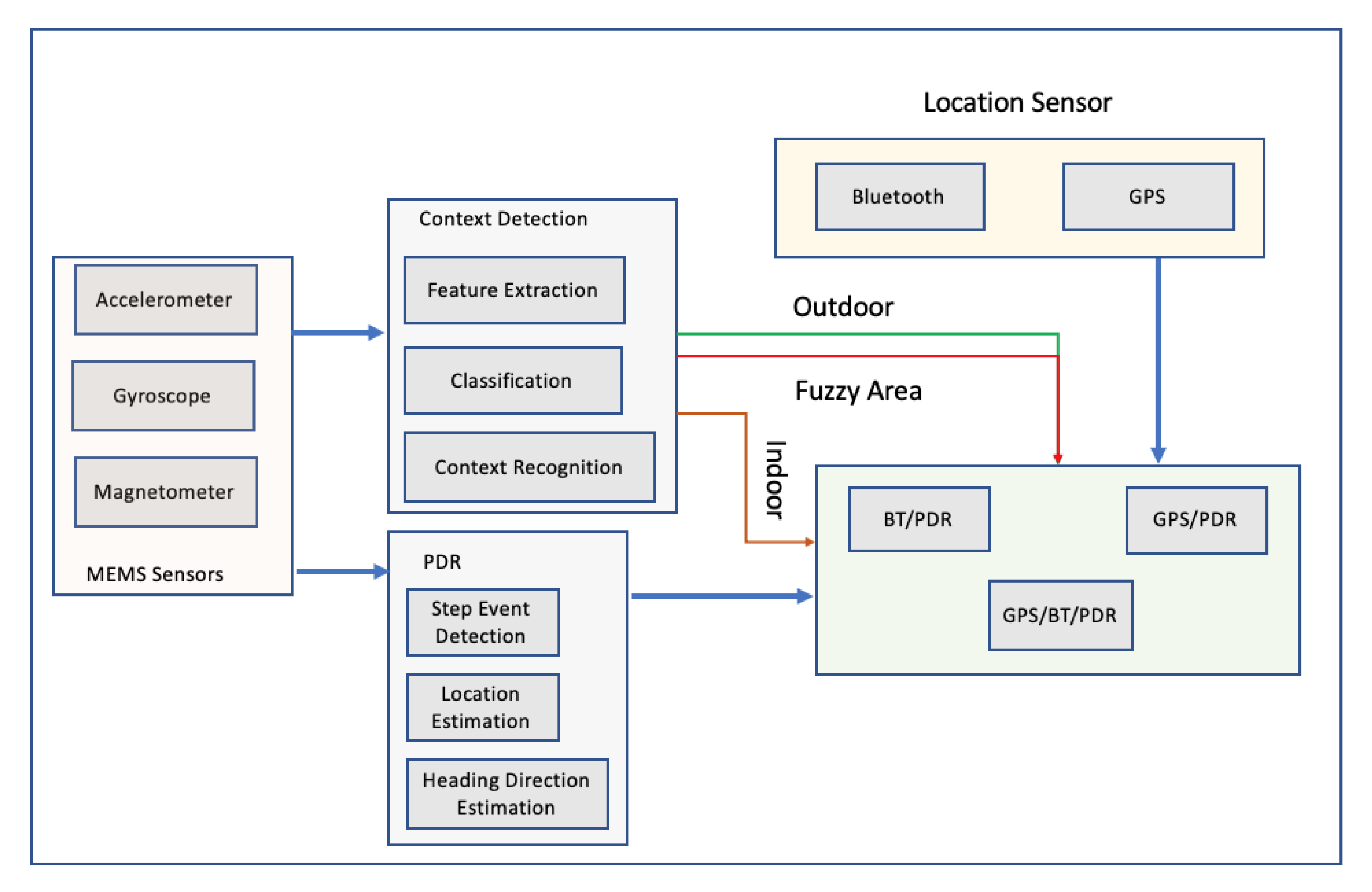
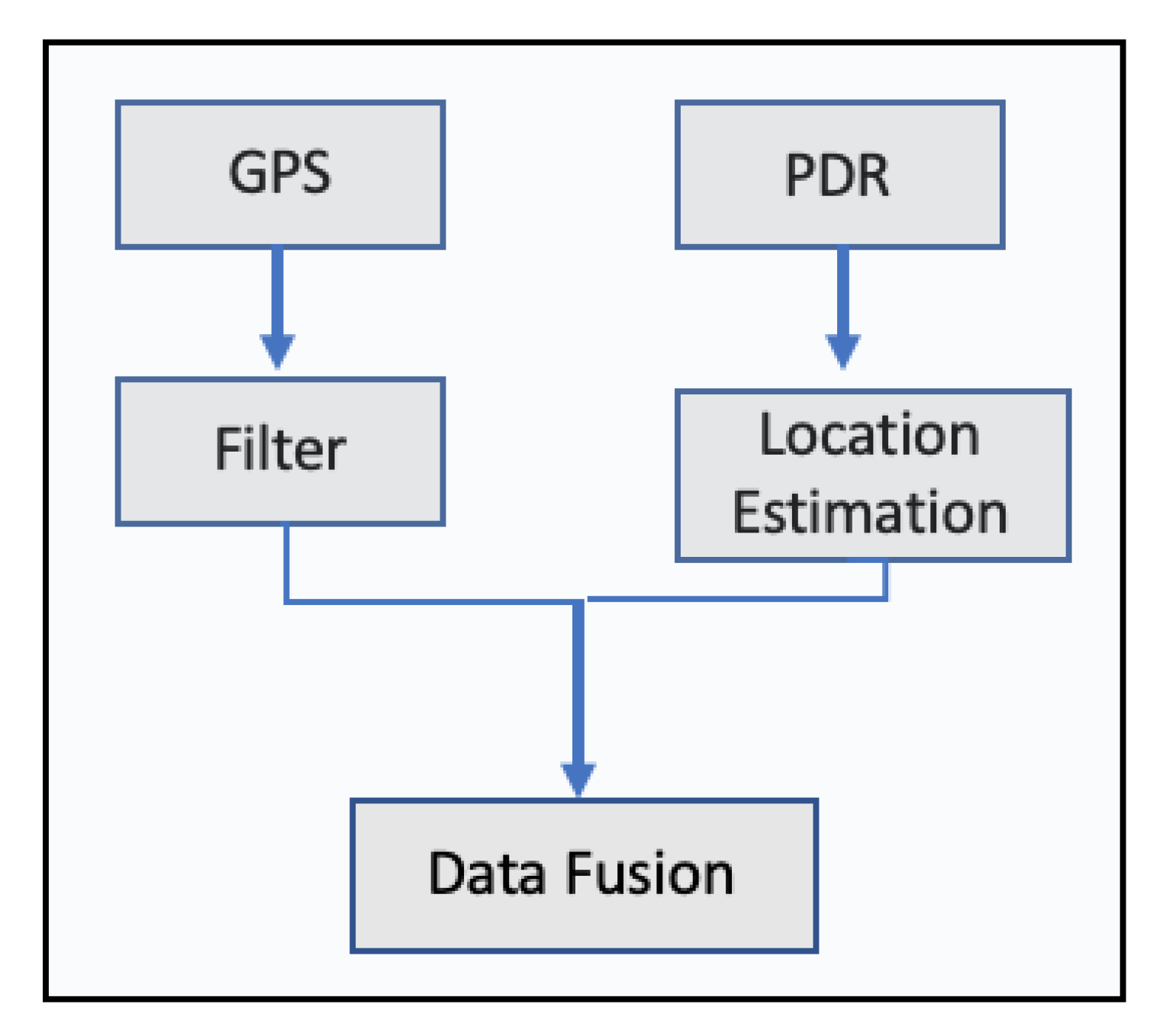
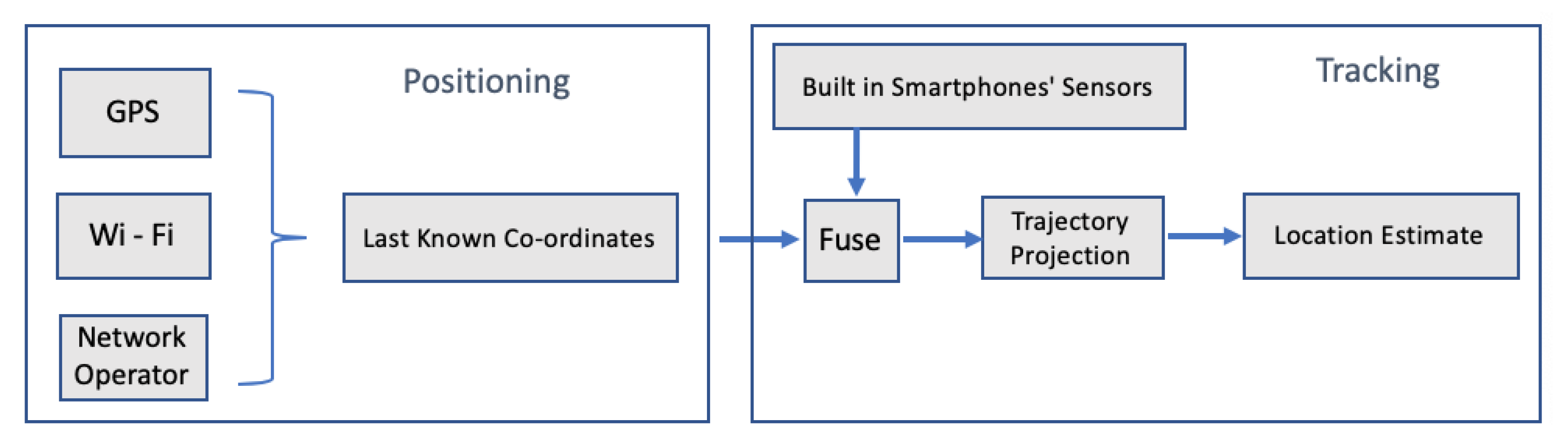
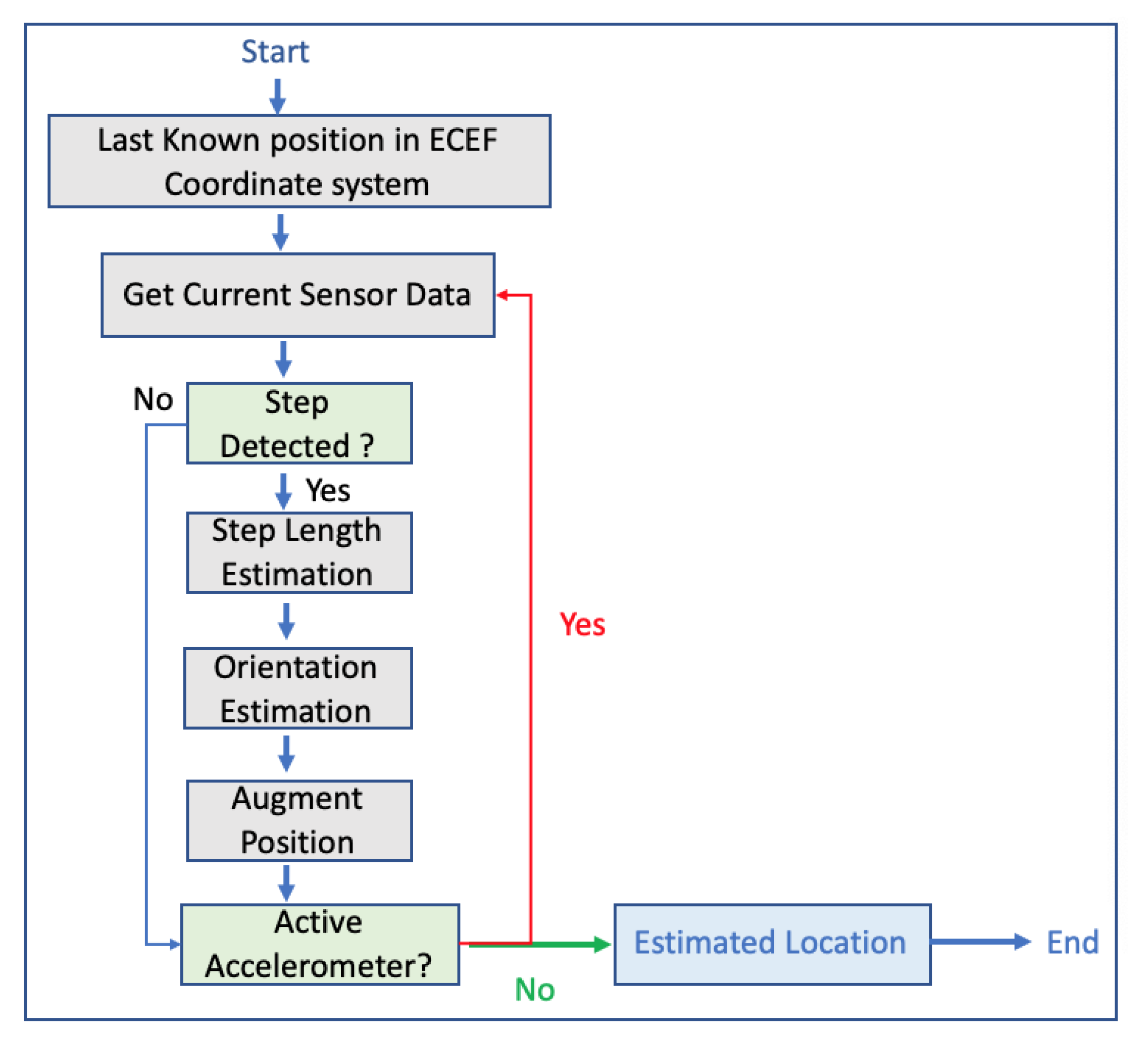
2.3.3. Inertial Navigation Systems Smartphones Sensors Data Fusion
3. VRU’s Next Move/Step Prediction
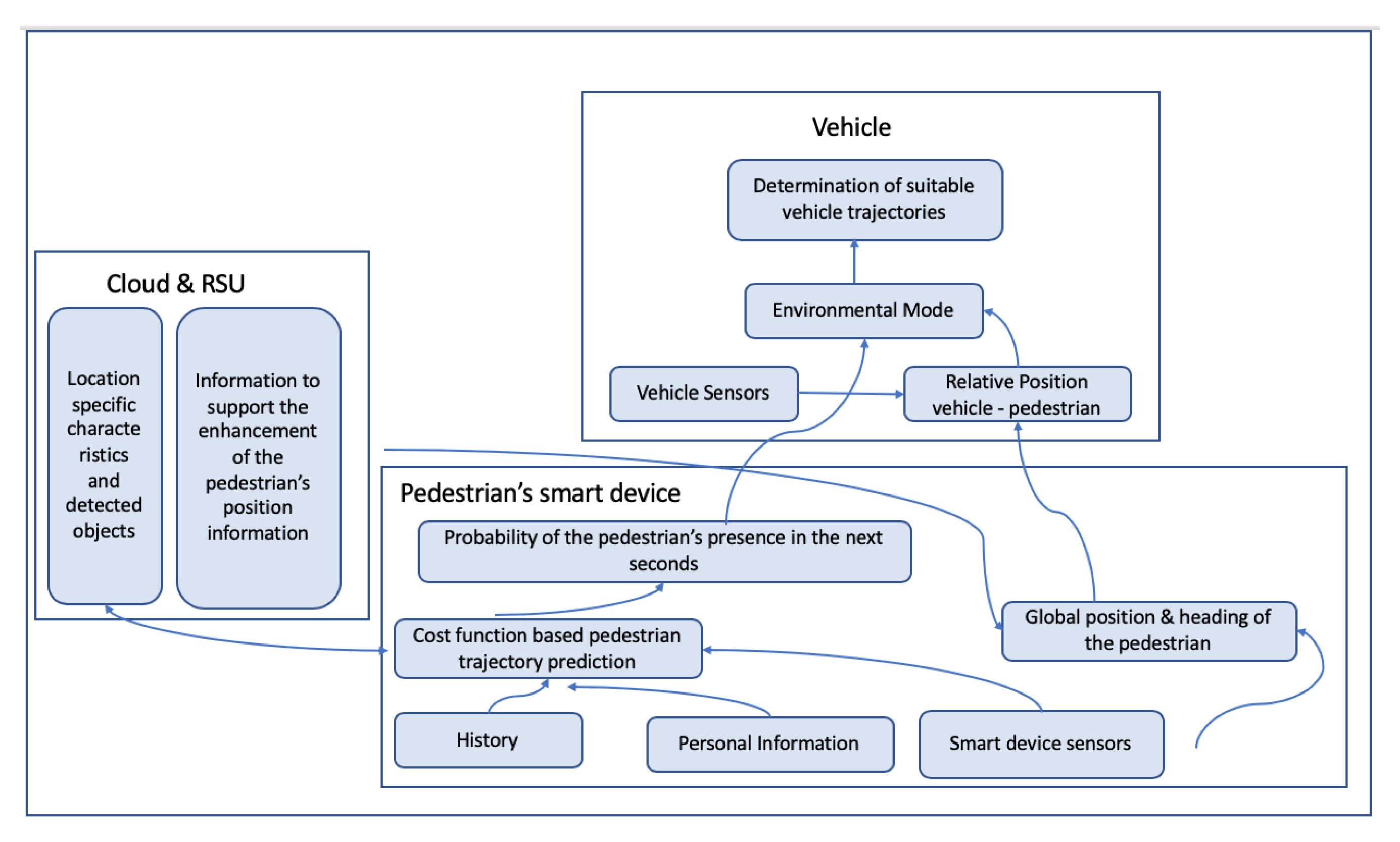
4. The Prediction and Communication P2V Proposed Framework
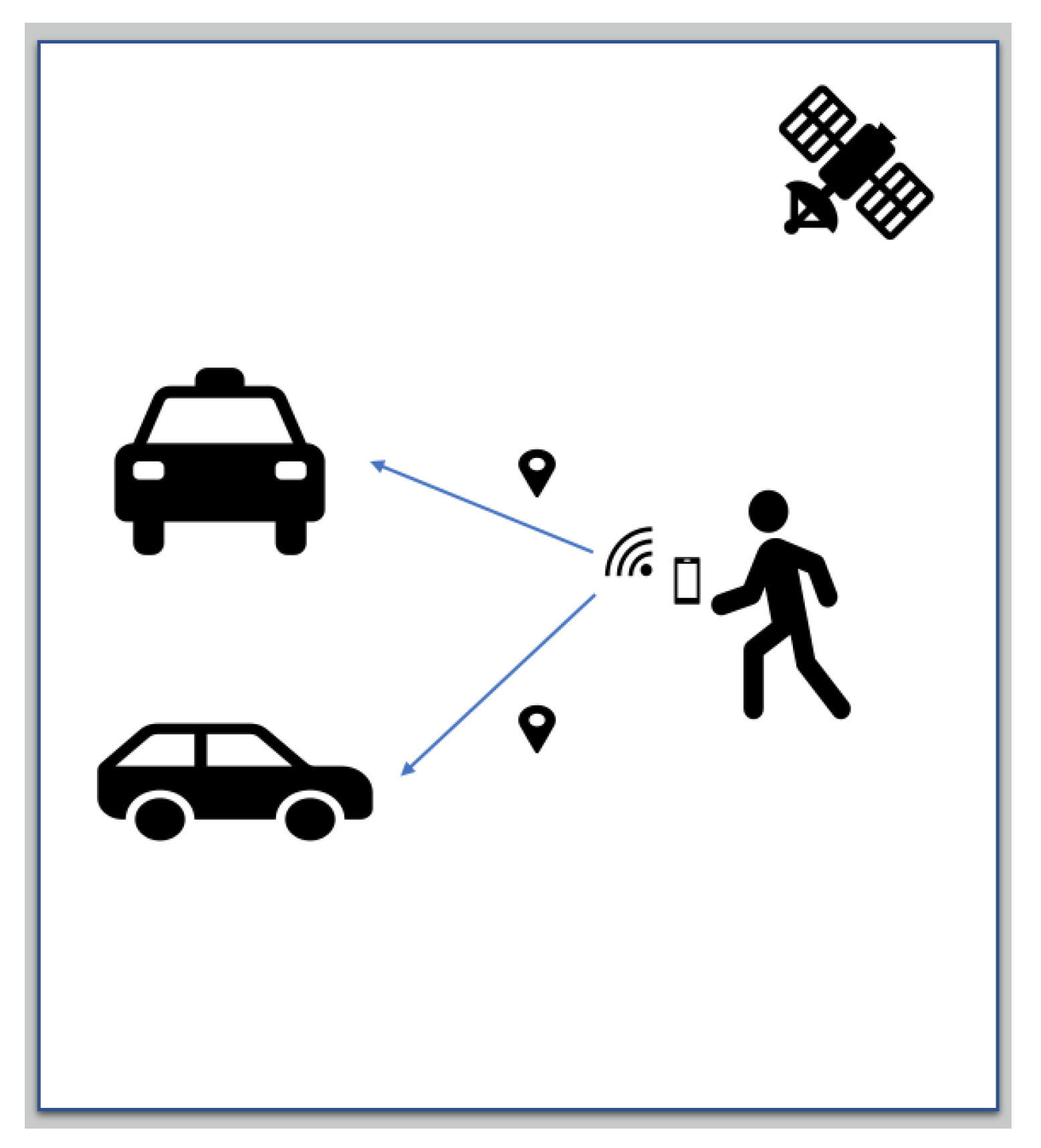
- Mobile phone of each passenger collects and fuses data coming from sensors such as accelerometer, magnetometer, gyroscope, compass, GPS, WiFi, barometer if available and heart rate sensor. Also data from maps are being collected as well.
- Street Matching is being carried out in order to determine whether the user is near a street by matching his/her location against a map. Based on Reference [21], where the authors have applied map matching techniques for vehicles [58,59], a similar approach could be developed to identify on which street the pedestrian is walking.
- Environment classification is executed in order to classify the area in which the pedestrian is walking, such as rural out of town, suburban and urban [21].
- Current and historical fused data are used in order to predict the next movement/next short path of the pedestrian.
- The pedestrians are classified on whether their current and near future position would lead them to a possible risk within the next seconds (maximum 10 s).
- Only the medium-risk and high-risk classified pedestrians’ information is communicated to all neighbors such as bicycles, motorbikes and cars.
- Based on this information, all neighbouring nodes can take the appropriate decisions in order to avoid possible accidents.
- Analyse the feasibility of existing prediction models for meeting the specific requirements of our framework;
- Measure their efficiency and accuracy;
- −
- Test different data mining techniques such as mean absolute error, root mean squared error, mean absolute percentage error and mean absolute scaled error.The models will be evaluated in terms of the accuracy, precision and recall results;
- −
- Integrate those models into a simulated environment using specific simulator environments like Veins [35] where the communication and real-time reaction of different entities will be incorporated and evaluated;
- −
- Our main objective is for the data processing part, data fusion, outdoor activity detection, street matching, environment classification, prediction and risk classification to be executed on the pedestrians mobile phone, a matter that needs to be evaluated during simulations, in terms of performance and smartphone battery consumption.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Astarita, V.; Festa, D.C.; Giofrè, P.; Guido, G.; Mongelli, D.W.E. Co-operative ITS: ESD a Smartphone Based System for Sustainability and Transportation Safety. Procedia Comput. Sci. 2016, 83, 449–456. [Google Scholar] [CrossRef]
- Rufino, J.; Silva, L.; Fernandes, B.; Almeida, J.; Ferreira, J. Empowering Vulnerable Road Users in C-ITS. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, UAE, 9–13 December 2018. [Google Scholar]
- Johnson, P. Ericsson Mobility Report. IoT Section; Ericsson: Stockholm, Sweden, 2016; pp. 25–33. [Google Scholar]
- Ericsson. Ericsson Mobility Report Q4 2018 Update; Ericsson: Stockholm, Sweden, 2019. [Google Scholar]
- Wahlstrom, J.; Skog, I.; Handel, P. Smartphone-Based Vehicle Telematics: A Ten-Year Anniversary. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2802–2825. [Google Scholar] [CrossRef]
- Lee, E.; Lee, E.; Gerla, M.; Oh, S.Y. Vehicular cloud networking: Architecture and design principles. IEEE Commun. Mag. 2014, 52, 148–155. [Google Scholar] [CrossRef]
- Lee, U.; Gerla, M. A survey of urban vehicular sensing platforms. Comput. Netw. 2010, 54, 527–544. [Google Scholar] [CrossRef]
- Caballero-Gil, C.; Caballero-Gil, P.; Molina-Gil, J. Design and Implementation of an Application for Deploying Vehicular Networks with Smartphones. Int. J. Distrib. Sens. Netw. 2013, 2013. [Google Scholar] [CrossRef]
- Advanced Traffic Management Systems. 2009. Available online: http://www.umtri.umich.edu/our-focus/advanced-traffic-management-systems (accessed on 1 October 2019).
- Ben-Elia, E.; Di Pace, R.; Bifulco, G.N.; Shiftan, Y. The impact of travel information’s accuracy on route-choice. Transp. Res. Part C Emerg. Technol. 2013, 26, 146–159. [Google Scholar] [CrossRef]
- Maglaras, L.A.; Basaras, P.; Katsaros, D. Exploiting vehicular communications for reducing CO2 emissions in urban environments. In Proceedings of the 2013 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Las Vegas, NV, USA, 2–6 December 2013; pp. 32–37. [Google Scholar]
- Mathew, T.V. Intelligent Transportation Systems—I. In Transportation System Engineering; Indian Institute of Technlology Bombay, Ed.; Indian Institute of Technlology Bombay: Bombay, India, 2014; Chapter 48; pp. 48.1–48.22. [Google Scholar]
- Agrawala, S.; Height, A. Intelligent Transport Systems in Commercial Vehicle Operations. Int. J. CCT 2009, 1, 27–35. [Google Scholar]
- Bagheri, M.; Siekkinen, M.; Nurminen, J.K. Cellular-based vehicle to pedestrian (V2P) adaptive communication for collision avoidance. In Proceedings of the 2014 International Conference on Connected Vehicles and Expo (ICCVE 2014), Vienna, Austria, 3–7 November 2014; pp. 450–456. [Google Scholar] [CrossRef]
- Karagiannis, G.; Altintas, O.; Ekici, E.; Heijenk, G.; Jarupan, B.; Lin, K.; Weil, T. Vehicular networking: A survey and tutorial on requirements, architectures, challenges, standards and solutions. IEEE Commun. Surv. Tutor. 2011, 13, 584–616. [Google Scholar] [CrossRef]
- Schwarz, S.; Sellitsch, D.; Tscheligi, M.; Olaverri-Monreal, C. Safety in Pedestrian Navigation: Road Crossing Habits and Route Quality Needs. In Proceedings of the Future Active Safety Technology towards Zero Traffic Accidents (FAST-Zero 2015 Symposium), Gothenburg, Sweden, 9–11 September 2015; pp. 305–310. [Google Scholar]
- Olaverri-Monreal, C. Autonomous vehicles and smart mobility related technologies. Infocommun. J. 2016, 8, 17–24. [Google Scholar]
- Allamehzadeh, A.; Olaverri-Monreal, C. Automatic and manual driving paradigms: Cost-efficient mobile application for the assessment of driver inattentiveness and detection of road conditions. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 26–31. [Google Scholar] [CrossRef]
- Chu, H.; Raman, V.; Shen, J.; Kansal, A.; Bahl, V.; Choudhury, R.R. I am a smartphone and I know my user is driving. In Proceedings of the 2014 Sixth International Conference on Communication Systems and Networks (COMSNETS), Bangalore, India, 6–10 January 2014; pp. 1–8. [Google Scholar]
- Wu, X.; Miucic, R.; Yang, S.; Al-Stouhi, S.; Misener, J.; Bai, S.; Chan, W.H. Cars talk to phones: A DSRC based vehicle-pedestrian safety system. In Proceedings of the IEEE Vehicular Technology Conference, Vancouver, BC, Canada, 14–17 September 2014. [Google Scholar] [CrossRef]
- Jain, S.; Borgiattino, C.; Ren, Y.; Gruteser, M.; Chen, Y. On the limits of positioning-based pedestrian risk awareness. In Proceedings of the 2014 Workshop on Mobile Augmented Reality and Robotic Technology-Based Systems—MARS ’14, Bretton Woods, NH, USA, 16 June 2014; pp. 23–28. [Google Scholar] [CrossRef]
- Wang, Q.; Guo, B.; Peng, G.; Zhou, G.; Yu, Z. CrowdWatch: Pedestrian safety assistance with mobile crowd sensing. In Proceedings of the Adjunct—International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp), Heidelberg, Germany, 12–16 September 2016; pp. 217–220. [Google Scholar] [CrossRef]
- Hussein, A.; García, F.; Armingol, J.M.; Olaverri-Monreal, C. P2V and V2P communication for pedestrian warning on the basis of autonomous vehicles. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, ITSC, Rio de Janeiro, Brazil, 1–4 November 2016; pp. 2034–2039. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, M.; Zhu, K.; Zhang, L. SenSafe: A smartphone-based traffic safety framework by sensing vehicle and pedestrian behaviors. Mob. Inf. Syst. 2016, 2016, 7967249. [Google Scholar] [CrossRef]
- Merdrignac, P.; Shagdar, O.; Nashashibi, F.; Merdrignac, P.; Shagdar, O.; Nashashibi, F. Fusion of Perception and V2P Communication Systems for Safety of Vulnerable Road Users Fusion of Perception and V2P Communication Systems for Safety of Vulnerable Road Users. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1740–1751. [Google Scholar] [CrossRef]
- Rub, T.; Krause, J.; Schonrock, R. V2X-based cooperative protection system for vulnerable road users and its impact on traffic. In Proceedings of the ITS World Congress, Melbourne, Australia, 10–14 October 2016; pp. 10–14. [Google Scholar]
- Bachmann, M.; Morold, M.; David, K. Improving smartphone based collision avoidance by using pedestrian context information. In Proceedings of the 2017 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kona, HI, USA, 13–17 March 2017; pp. 2–5. [Google Scholar] [CrossRef]
- Kotte, J.; Schmeichel, C.; Zlocki, A.; Gathmann, H.; Eckstein, L. Concept of an enhanced V2X pedestrian collision avoidance system with a cost function-based pedestrian model. Traffic Inj. Prev. 2017, 18, S37–S43. [Google Scholar] [CrossRef] [PubMed]
- Ho, P.F.; Chen, J.C. WiSafe: Wi-Fi Pedestrian Collision Avoidance System. IEEE Trans. Veh. Technol. 2017, 66, 4564–4578. [Google Scholar] [CrossRef]
- Datta, T.; Jain, S.; Gruteser, M. Towards city-scale smartphone sensing of potentially unsafe pedestrian movements. In Proceedings of the 11th IEEE International Conference on Mobile Ad Hoc and Sensor Systems (MASS 2014), Philadelphia, PA, USA, 28–30 October 2014; pp. 663–667. [Google Scholar] [CrossRef]
- Engel, S.; Kratzsch, C.; David, K.; Warkow, D.; Holzknecht, M. Car2Pedestrian Positioning: Methods for Improving GPS Positioning in Radio-Based VRU Protection Systems; Tagung Fahrerassistenzsysteme: Munich, Germany, 2013. [Google Scholar]
- Flach, A.; Memon, A.Q.; Lau, S.L.; David, K. Pedestrian movement recognition for radio based collision avoidance: A performance analysis. In Proceedings of the IEEE Vehicular Technology Conference, Yokohama, Japan, 15–18 May 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Sugimoto, C.; Nakamura, Y.; Hashimoto, T. Prototype of pedestrian-to-vehicle communication system for the prevention of pedestrian accidents using both 3G wireless and WLAN communication. In Proceedings of the 3rd International Symposium on Wireless Pervasive Computing (ISWPC 2008), Santorini, Greece, 7–9 May 2008; pp. 764–767. [Google Scholar] [CrossRef]
- Klaus, D.; Flach, A. Method for Avoiding Collision. U.S. Patent No. 8,547,249, 1 October 2013. [Google Scholar]
- Sommer, C.; German, R.; Dressler, F. Bidirectionally coupled network and road traffic simulation for improved IVC analysis. IEEE Trans. Mob. Comput. 2010, 10, 3–15. [Google Scholar] [CrossRef]
- Bartie, P.; Mackaness, W. D3.4 Pedestrian Position Tracker. Available online: http://www.spacebook-project.eu/pubs/D3.4.pdf (accessed on 1 October 2019).
- Li, B.; Zhang, J.; Mumford, P.; Dempster, A.G. How good is Assisted GPS? In Proceedings of the International Global Navigation Satellite Systems Society (IGNSS Symposium 2011), Sydney, Australi, 15–17 November 2011. [Google Scholar]
- Van Diggelen, F.; Enge, P. The world’s first GPS MOOC and worldwide laboratory using smartphones. In Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS 2015, Tampa, FL, USA, 14–18 September 2015; pp. 361–369. [Google Scholar]
- Yoon, D.; Kee, C.; Seo, J.; Park, B. Position accuracy improvement by implementing the DGNSS-CP algorithm in smartphones. Sensors 2016, 16, 910. [Google Scholar] [CrossRef] [PubMed]
- Ssebazza, L.; Pan, Y.J. Dgps-Based Localization and Path Following Approach for Outdoor Wheeled Mobile Robots. Int. J. Robot. Autom. 2015, 30. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef]
- Chu, H.J.; Tsai, G.J.; Chiang, K.W.; Duong, T.T. GPS/MEMS INS data fusion and map matching in urban areas. Sensors 2013, 13, 11280–11288. [Google Scholar] [CrossRef]
- Cho, S.Y.; Park, C.G. MEMS Based Pedestrian Navigation System. J. Navig. 2006, 59, 135–153. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Seco, F.; Prieto, C.; Guevara, J. A comparison of pedestrian dead-reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the WISP 2009—6th IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungry, 26–28 August 2009; pp. 37–42. [Google Scholar] [CrossRef]
- Feliz, R.; Zalama, E.; Garcia-bermejo, J.G. Pedestrian tracking using inertial sensors. J. Phys. Agents 2009, 3, 35–42. [Google Scholar]
- Feng, W.; Zhao, H.; Zhao, Q.; Li, J. Integration of GPS and low cost INS for pedestrian navigation aided by building layout. Chin. J. Aeronaut. 2013, 26, 1283–1289. [Google Scholar] [CrossRef]
- Bo, C.; Li, X.Y.; Jung, T.; Mao, X.; Tao, Y.; Yao, L. SmartLoc: Push the Limit of the Inertial Sensor Based Metropolitan Localization Using Smartphone. In Proceedings of the Mobicom 13, Miami, FL, USA, 30 September–4 October 2013; pp. 195–197. [Google Scholar] [CrossRef]
- Zhu, X.; Li, Q.; Chen, G. APT: Accurate outdoor pedestrian tracking with smartphones. In Proceedings of the IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 2508–2516. [Google Scholar] [CrossRef]
- Tian, Z.; Zhang, Y.; Zhou, M.; Liu, Y. Pedestrian dead reckoning for MARG navigation using a smartphone. Eurasip J. Adv. Signal Process. 2014, 2014, 1–9. [Google Scholar] [CrossRef]
- Li, X.; Wei, D.; Lai, Q.; Xu, Y.; Yuan, H. Smartphone-based integrated PDR/GPS/Bluetooth pedestrian location. Adv. Space Res. 2017, 59, 877–887. [Google Scholar] [CrossRef]
- Poorani, M.; Kumaresh, S.; Karthick, K.; Leena, V.; Vaidehi, V. Real-Time Localization of a Person Using Smart Phone. In Proceedings of the 2018 International Conference on Recent Trends in Advance Computing (ICRTAC), Chennai, India, 10–11 September 2018; pp. 66–72. [Google Scholar]
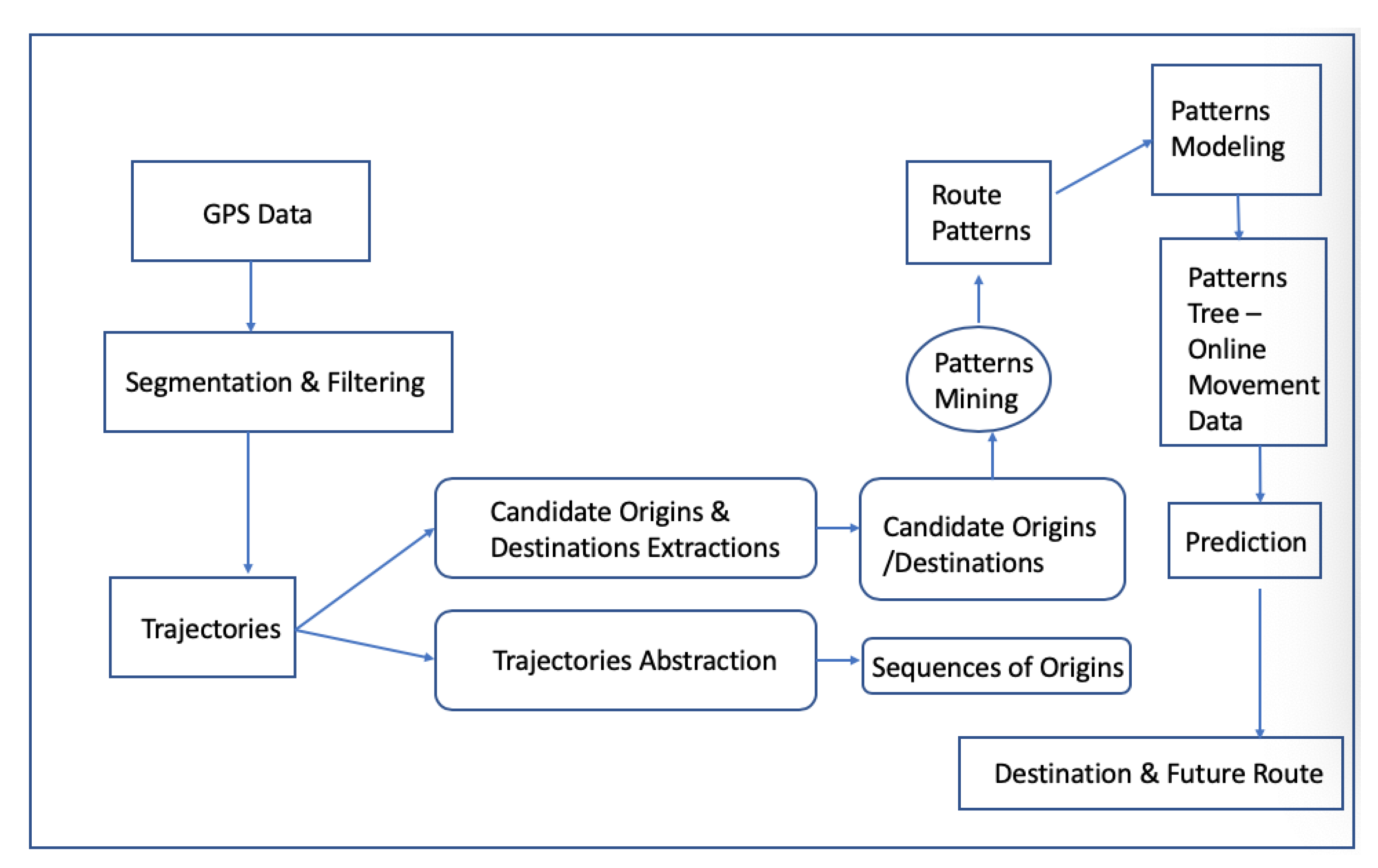
- Chen, L.; Lv, M.; Chen, G. A system for destination and future route prediction based on trajectory mining. Pervasive Mob. Comput. 2010, 6, 657–676. [Google Scholar] [CrossRef]
- Asahara, A.; Maruyama, K.; Sato, A.; Seto, K. Pedestrian-movement prediction based on mixed Markov-chain model. In Proceedings of the 19th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems—GIS ’11, Chicago, IL, USA, 1–4 November 2011; pp. 25–33. [Google Scholar] [CrossRef]
- Wang, A.Y.; Wang, L. Walking Step prediction based on GA optimized neural network algorithm. In Proceedings of the 2017 2nd IEEE International Conference on Computational Intelligence and Applications (ICCIA), Beijing, China, 8–11 September 2017; pp. 295–298. [Google Scholar] [CrossRef]
- Murphey, Y.L.; Liu, C.; Tayyab, M.; Narayan, D. Accurate pedestrian path prediction using neural networks. In Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence (SSCI 2017), Honolulu, HI, USA, 27 November–1 December 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Kim, D.; Kim, Y.; Estrin, D.; Srivastava, M. SensLoc: Sensing everyday places and paths using less energy. In Proceedings of the 8th ACM Conference on Embedded Networked Sensor Systems, Zurich, Switzerland, 3–5 November 2010; pp. 43–56. [Google Scholar] [CrossRef]
- Zhou, P.; Zheng, Y.; Li, Z.; Shen, G. IODetector: A Generic Service for Indoor/Outdoor Detection. In Proceedings of the 10th ACM Conference on Embedded Network Sensor Systems, Toronto, ON, Canada, 6–9 November 2012; Volume 11, pp. 361–362. [Google Scholar] [CrossRef]
- Greenfeld, J. Matching GPS Observations to Locations on a Digital Map. In Proceedings of the 81th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 13–17 January 2002; pp. 164–173. [Google Scholar]
- White, C.; Bernstein, D.; Kornhauser, A. Some Map Matching Algorithms for Personal Navigation Assistants. Transp. Res. Part C Emerg. Technol. 2000, 8, 91–108. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Explicit Lifetime | Local Validity (km) |
|---|---|
| 0–30 s Accident Warning | 0.1 |
| 31 s–10 min Emergency Vehicle Warning | 1 |
| 1 day–work zone warning | 5 |
| Reference | Year | Sensors | Method | System Type |
|---|---|---|---|---|
| [33] | 2008 | GPS | Collision Risk Evaluation | Pedestrian-to-vehicle communication system |
| [32] | 2011 | GPS, Accelerometer | Pedestrian Movement Recognition | Collision Avoidance |
| [34] | 2011 | Accelerometer | Prediction of Pedestrian Behavior | Patented Method for avoiding collision |
| [31] | 2013 | GPS, Accelerometer, Gyroscope, Compass | Dead Reckoning Algorithm | GPS Positioning in VRU Protection Systems |
| [14] | 2014 | GPS | V2P Wireless Communication | Cellular technologies user for for V2P applications |
| [19] | 2014 | Accelerometer, Gyroscope, Compass | Sensors Fusion | Driver Detection System |
| [20] | 2014 | Wi-Fi, GPS, Gyroscope, Accelerometer, Magnetometer | Pedestrian/Vehicle Path Prediction | A DSRC based vehicle-pedestrian safety system |
| [21] | 2014 | Accelerometer, GPS | Smartphone Sensors Fusion | Pedestrians risk classification |
| [30] | 2015 | GPS, Accelerometer, Gyroscope, Compass, Gravity, Magnetometer | Smartphone Sensors Fusion | Sensing unsafe pedestrian movements |
| [1] | 2016 | GPS, Accelerometer, Gyroscope, Compass, Gravity, Magnetometer | Sensors Fusion | Smartphone Based Transport Safety System |
| [22] | 2016 | GPS, Accelerometer, Gyroscope | Sensors Fusion | Pedestrian Safety with mobile crowd sensing |
| [23] | 2016 | GPS, Magnetometer | Collision Prediction Algorithm | Collision Prediction Algorithm for P2V and V2P |
| [24] | 2016 | GPS, Accelerometer, Gyroscope, Magnetometer | Sensors Fusion | Traffic safety framework by sensing driving behavior |
| [25] | 2016 | GPS | Vehicle GPS Data Fusion | V2P to enhance VRUs’ safety |
| [26] | 2016 | GPS, Acccelerometer, Magnetometer, Gyroscope | Sensors Fusion, Collision Prediction | VRU protection system |
| [27] | 2017 | GPS, Acccelerometer | Sensors Fusion, VRU Context/Activity | Smartphone collision avoidance system |
| [28] | 2017 | GPS, Accelerometer, Gyroscope, Magnetometer | VRUs Future Position Prediction | V2X pedestrian collision avoidance system |
| [29] | 2017 | GPS, WiFi | VRUs position broadcast via WiFi | Wi-Fi Pedestrian Collision Avoidance System |
| Assessment Method | GPS–DGPS | Glonass–DGPS | Multi GNSS–DGNSS |
|---|---|---|---|
| RMS (m) | 0.42 | 0.64 | 0.41 |
| Mean (m) | 0.46 | 0.44 | 0.30 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vourgidis, I.; Maglaras, L.; Alfakeeh, A.S.; Al-Bayatti, A.H.; Ferrag, M.A. Use Of Smartphones for Ensuring Vulnerable Road User Safety through Path Prediction and Early Warning: An In-Depth Review of Capabilities, Limitations and Their Applications in Cooperative Intelligent Transport Systems. Sensors 2020, 20, 997. https://doi.org/10.3390/s20040997
Vourgidis I, Maglaras L, Alfakeeh AS, Al-Bayatti AH, Ferrag MA. Use Of Smartphones for Ensuring Vulnerable Road User Safety through Path Prediction and Early Warning: An In-Depth Review of Capabilities, Limitations and Their Applications in Cooperative Intelligent Transport Systems. Sensors. 2020; 20(4):997. https://doi.org/10.3390/s20040997
Chicago/Turabian StyleVourgidis, Ioannis, Leandros Maglaras, Ahmed S. Alfakeeh, Ali H. Al-Bayatti, and Mohamed Amine Ferrag. 2020. "Use Of Smartphones for Ensuring Vulnerable Road User Safety through Path Prediction and Early Warning: An In-Depth Review of Capabilities, Limitations and Their Applications in Cooperative Intelligent Transport Systems" Sensors 20, no. 4: 997. https://doi.org/10.3390/s20040997
APA StyleVourgidis, I., Maglaras, L., Alfakeeh, A. S., Al-Bayatti, A. H., & Ferrag, M. A. (2020). Use Of Smartphones for Ensuring Vulnerable Road User Safety through Path Prediction and Early Warning: An In-Depth Review of Capabilities, Limitations and Their Applications in Cooperative Intelligent Transport Systems. Sensors, 20(4), 997. https://doi.org/10.3390/s20040997