A Subspace Approach to Sparse Sampling Based Data Gathering in Wireless Sensor Networks



Abstract
1. Introduction
2. Matrix Completion in WSNs
2.1. Matrix Completion
2.2. Matrix Completion Based Method in WSNs
3. The Proposed Method
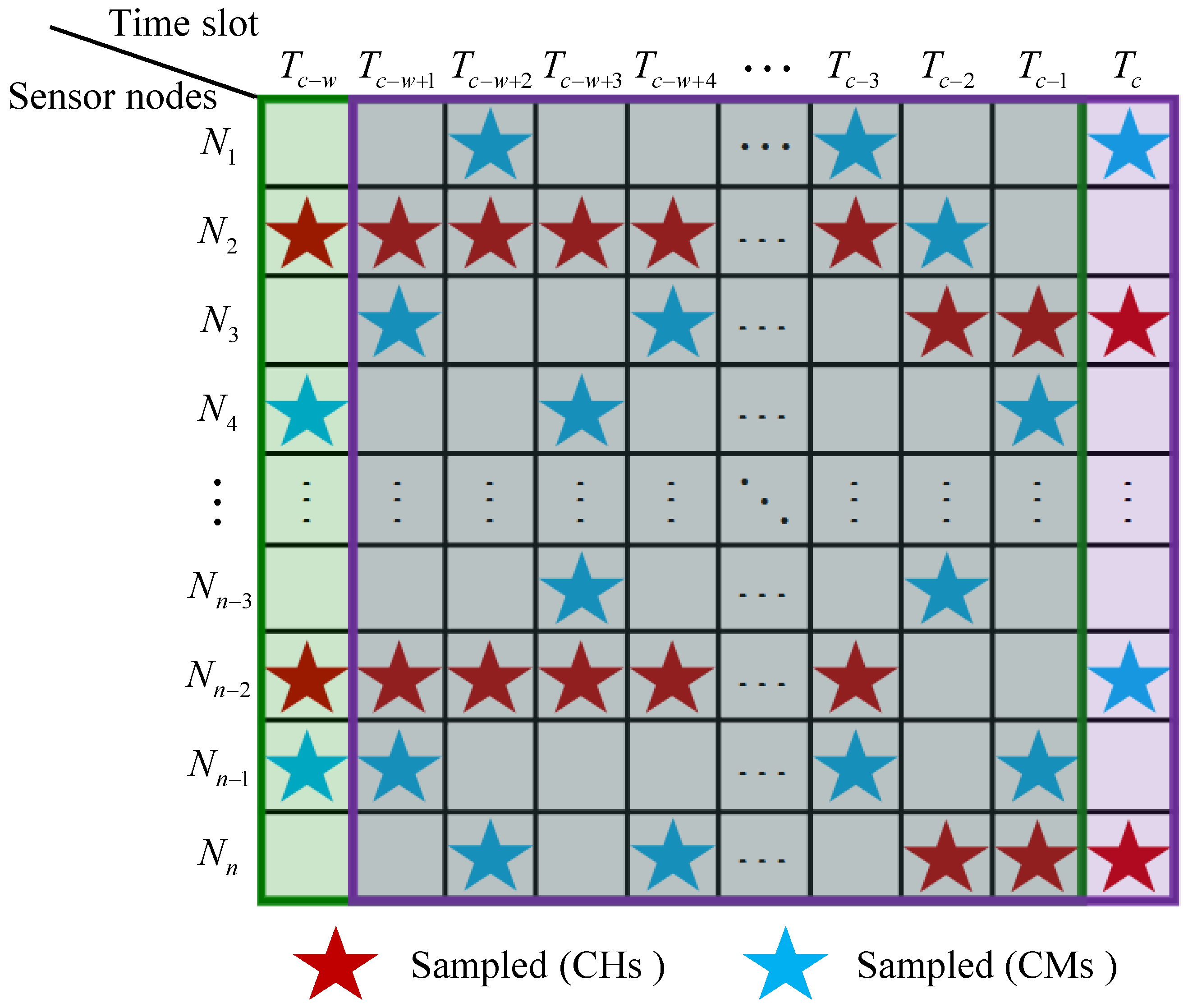
3.1. The Sparse Sampling Data Gathering Scheme
3.2. The Sliding Window Model
3.3. The Subspace Approach for Reconstruction
4. Experiments and Analysis
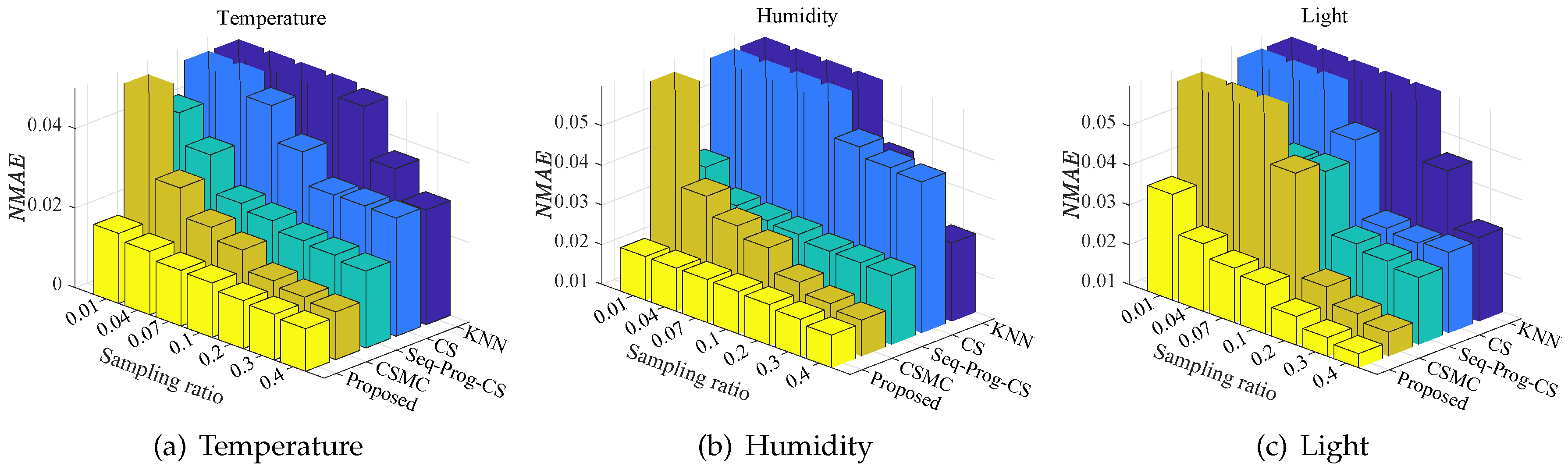
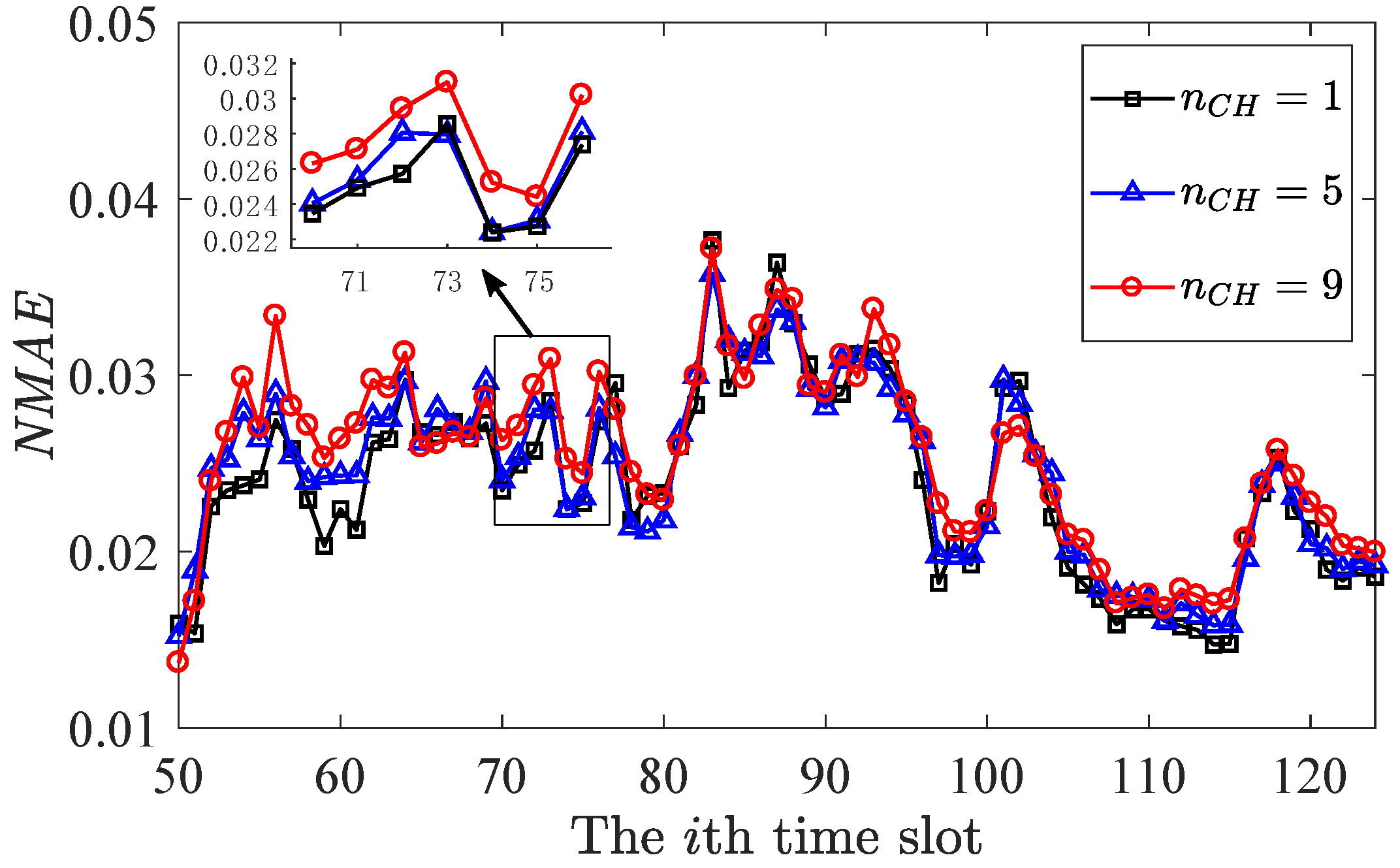
4.1. Data Reconstruction Performance
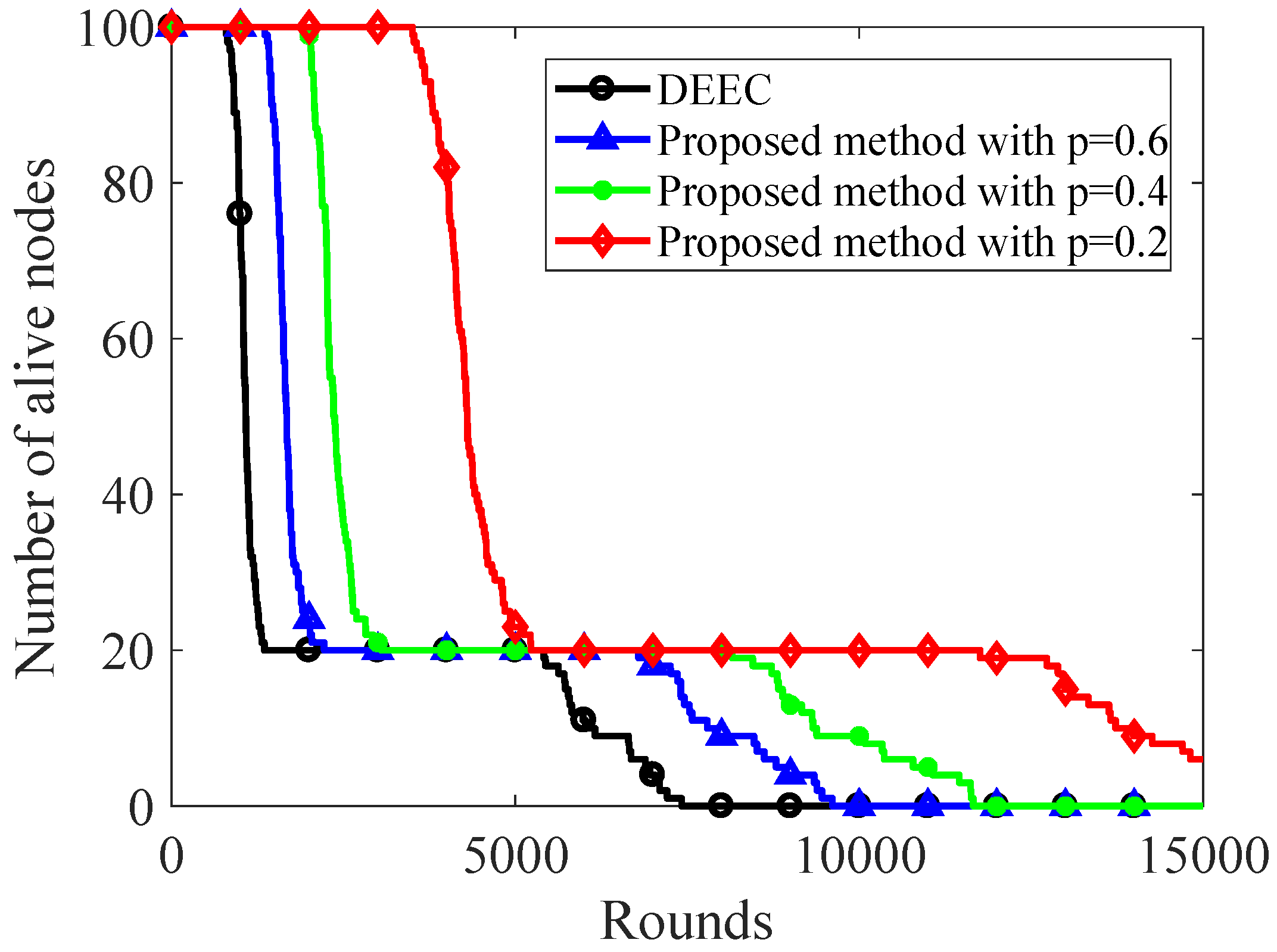
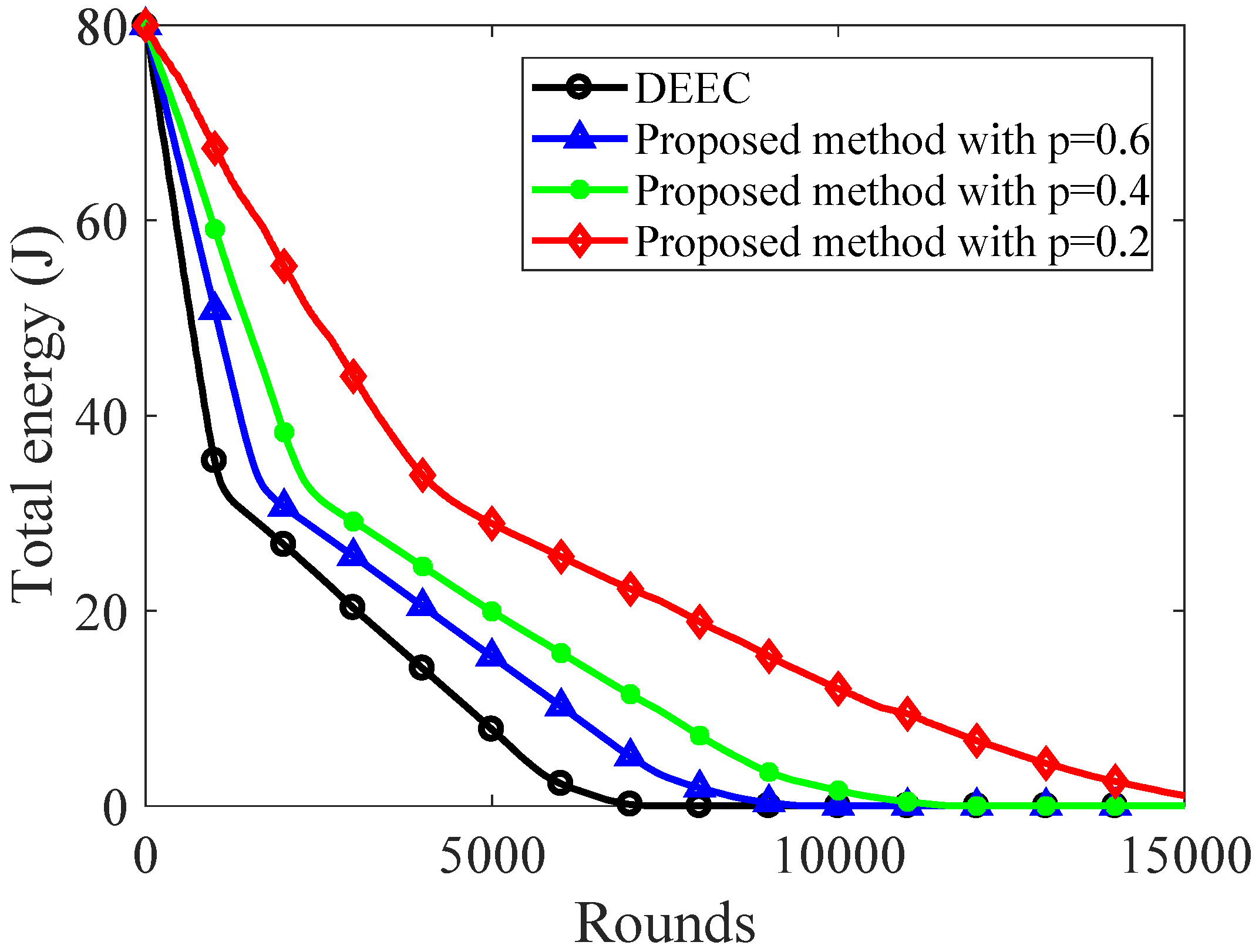
4.2. The Energy Consumption Performance
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yoon, S.; Shahabi, C. The Clustered AGgregation (CAG) technique leveraging spatial and temporal correlations in wireless sensor networks. ACM Trans. Sens. Networks (TOSN) 2007, 3, 3–es. [Google Scholar] [CrossRef]
- Luo, C.; Wu, F.; Sun, J.; Chen, C.W. Compressive data gathering for large-scale wireless sensor networks. In Proceedings of the 15th Annual International Conference on Mobile Computing and Networking, Beijing, China, 20–25 September 2009; pp. 145–156. [Google Scholar]
- Cheng, J.; Ye, Q.; Jiang, H.; Wang, D.; Wang, C. STCDG: An efficient data gathering algorithm based on matrix completion for wireless sensor networks. IEEE Trans. Wirel. Commun. 2013, 12, 850–861. [Google Scholar] [CrossRef]
- Qing, L.; Zhu, Q.; Wang, M. Design of a distributed energy-efficient clustering algorithm for heterogeneous wireless sensor networks. Comput. Commun. 2006, 29, 2230–2237. [Google Scholar] [CrossRef]
- Lindsey, S.; Raghavendra, C.; Sivalingam, K.M. Data gathering algorithms in sensor networks using energy metrics. IEEE Trans. Parallel Distrib. Syst. 2002, 13, 924–935. [Google Scholar] [CrossRef]
- Zhang, H.; Shen, H. Balancing energy consumption to maximize network lifetime in data-gathering sensor networks. IEEE Trans. Parallel Distrib. Syst. 2008, 20, 1526–1539. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candès, E.J.; Recht, B. Exact matrix completion via convex optimization. Found. Comput. Math. 2009, 9, 717–772. [Google Scholar] [CrossRef]
- Xiang, L.; Luo, J.; Vasilakos, A. Compressed data aggregation for energy efficient wireless sensor networks. In Proceedings of the 2011 8th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, Salt Lake City, UT, USA, 27–30 June 2011. [Google Scholar]
- Markus, L.; Marian, C.; Markku, J. Sequential compressed sensing with progressive signal reconstruction in wireless sensor networks. IEEE Trans. Wirel. Commun. 2015, 14, 1622–1635. [Google Scholar]
- Zhao, C.; Zhang, W.; Yang, Y.; Yao, S. Treelet-based clustered compressive data aggregation for wireless sensor networks. IEEE Trans. Veh. Technol. 2015, 64, 4257–4267. [Google Scholar] [CrossRef]
- Ebrahimi, D.; Assi, C. Compressive data gathering using random projection for energy efficient wireless sensor networks. Ad Hoc Networks 2014, 16, 105–119. [Google Scholar] [CrossRef]
- Wu, X.; Xiong, Y.; Yang, P.; Wan, S.; Huang, W. Sparsest random scheduling for compressive data gathering in wireless sensor networks. IEEE Trans. Wirel. Commun. 2014, 13, 5867–5877. [Google Scholar] [CrossRef]
- Ebrahimi, D.; Assi, C. On the interaction between scheduling and compressive data gathering in wireless sensor networks. IEEE Trans. Wirel. Commun. 2016, 15, 2845–2858. [Google Scholar] [CrossRef]
- Kong, L.; Xia, M.; Liu, X.Y.; Chen, G.; Gu, Y.; Wu, M.Y.; Liu, X. Data loss and reconstruction in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 2818–2828. [Google Scholar] [CrossRef]
- He, J.; Sun, G.; Zhang, Y.; Wang, Z. Data Recovery in Wireless Sensor Networks With Joint Matrix Completion and Sparsity Constraints. IEEE Commun. Lett. 2015, 19, 2230–2233. [Google Scholar] [CrossRef]
- Xie, K.; Wang, L.; Wang, X.; Xie, G.; Wen, J. Low cost and high accuracy data gathering in WSNs with matrix completion. IEEE Trans. Mob. Comput. 2018, 17, 1595–1608. [Google Scholar] [CrossRef]
- Xu, Y.; Sun, G.; Geng, T.; He, J. Low-Energy Data Collection in Wireless Sensor Networks Based on Matrix Completion. Sensors 2019, 19, 945. [Google Scholar] [CrossRef]
- He, J.; Zhou, Y.; Sun, G.; Geng, T. Multi-Attribute Data Recovery in Wireless Sensor Networks With Joint Sparsity and Low-Rank Constraints Based on Tensor Completion. IEEE Access 2019, 7, 135220–135230. [Google Scholar] [CrossRef]
- Recht, B.; Fazel, M.; Parrilo, P.A. Guaranteed minimum-rank solutions of linear matrix equations via nuclear norm minimization. SIAM Rev. 2010, 52, 471–501. [Google Scholar] [CrossRef]
- Cai, J.F.; Candès, E.J.; Shen, Z. A singular value thresholding algorithm for matrix completion. SIAM J. Optim. 2010, 20, 1956–1982. [Google Scholar] [CrossRef]
- Hardt, M. Understanding alternating minimization for matrix completion. In Proceedings of the 2014 IEEE 55th Annual Symposium on Foundations of Computer Science, Philadelphia, PA, USA, 18–21 October 2014; pp. 651–660. [Google Scholar]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Parikh, N.; Boyd, S.P. Proximal Algorithms. Found Trends Optim. 2014, 1, 127–239. [Google Scholar] [CrossRef]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Cover, T.; Hart, P. Nearest neighbor pattern classification. IEEE Trans. Inf. Theory 1967, 13, 21–27. [Google Scholar] [CrossRef]
- He, Y.; Mo, L.; Liu, Y. Why are long-term large-scale wireless sensor networks difficult: Early experience with GreenOrbs. ACM SIGMOBILE Mob. Comp. Commun. Rev. 2010, 14, 10–12. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input: |
| Initialized ,,and with zeros vectors; |
| The subspace representing the spatial distributions; |
| The regularization parameter and the penalty parameter ; |
| The measurements , the sampling operation , and the iteration number ; |
| do |
| 1)Iteration number ; |
| 2)Update by solving (9); |
| 3)Update by solving (12); |
| 4)Update by solving (11); |
| whileand; |
| Output: |
| Description | Value |
|---|---|
| a | 4 |
| Initial energy of normal node | 0.5J |
| Energy for transmit per bit | 50nJ/bit |
| Energy for receiving per bit | 50nJ/bit |
| Amplifier energy for free space model | 10pJ/bit/ |
| Amplifier energy for multipath fading model | 0.0013pJ/bit/ |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, J.; Zhang, X.; Zhou, Y.; Maibvisira, M. A Subspace Approach to Sparse Sampling Based Data Gathering in Wireless Sensor Networks. Sensors 2020, 20, 985. https://doi.org/10.3390/s20040985
He J, Zhang X, Zhou Y, Maibvisira M. A Subspace Approach to Sparse Sampling Based Data Gathering in Wireless Sensor Networks. Sensors. 2020; 20(4):985. https://doi.org/10.3390/s20040985
Chicago/Turabian StyleHe, Jingfei, Xiaoyue Zhang, Yatong Zhou, and Miriam Maibvisira. 2020. "A Subspace Approach to Sparse Sampling Based Data Gathering in Wireless Sensor Networks" Sensors 20, no. 4: 985. https://doi.org/10.3390/s20040985
APA StyleHe, J., Zhang, X., Zhou, Y., & Maibvisira, M. (2020). A Subspace Approach to Sparse Sampling Based Data Gathering in Wireless Sensor Networks. Sensors, 20(4), 985. https://doi.org/10.3390/s20040985