Low Noise Interface ASIC of Micro Gyroscope with Ball-disc Rotor


Abstract
1. Introduction
2. System Noise of Micro Gyroscope
2.1. Mechanical Noise
2.2. Driving Noise
2.3. Electronic Noise
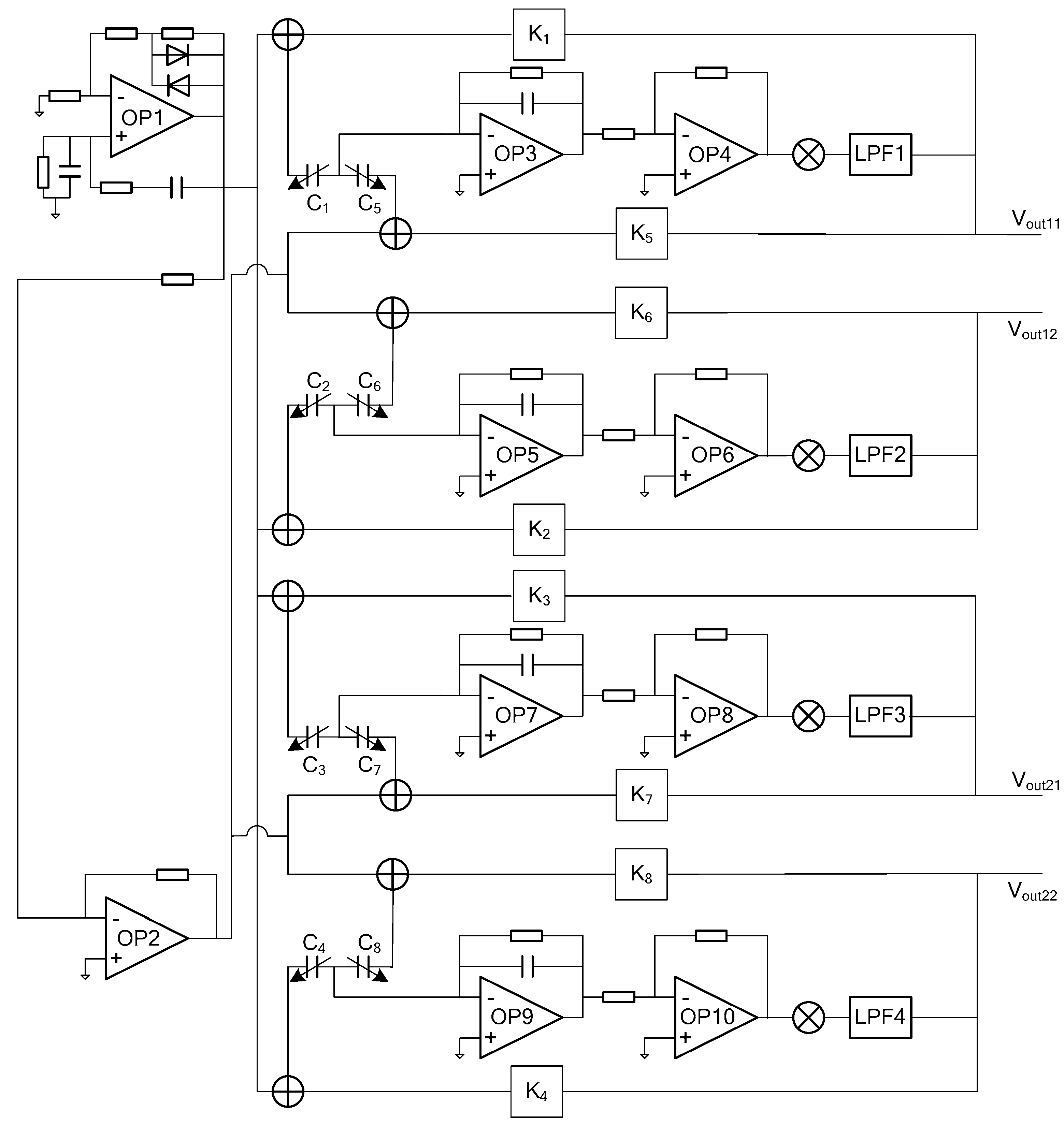
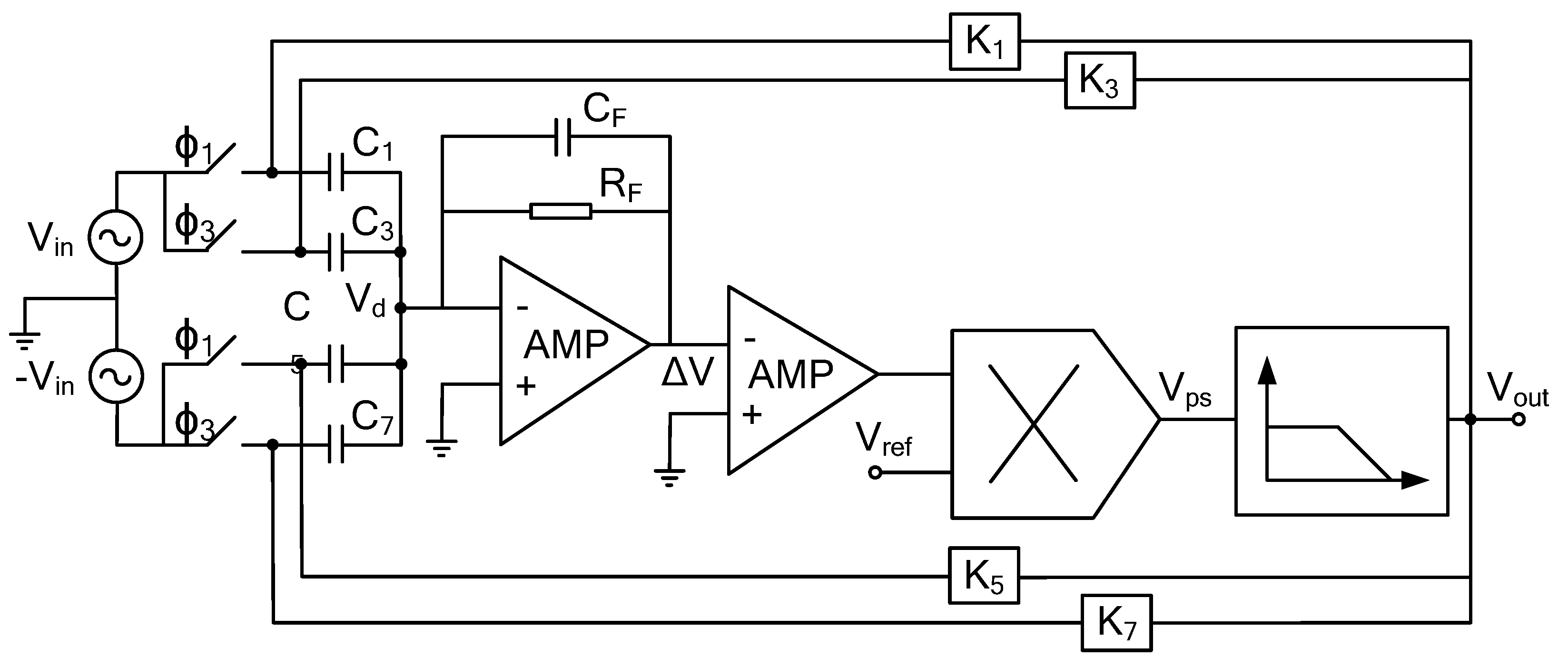
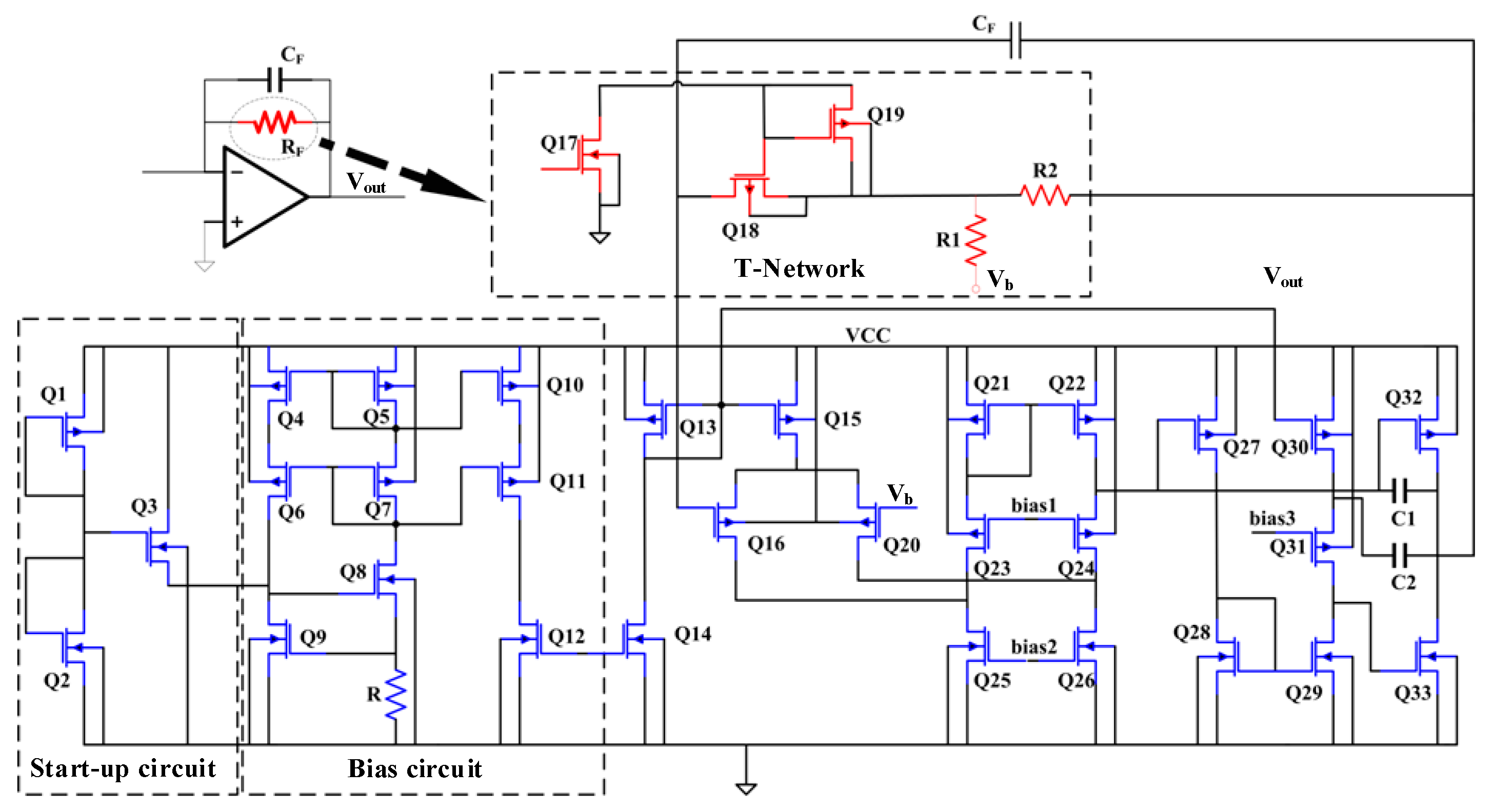
3. Low Noise Interface Circuits
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mohd-Yasin, F.; Nagel, D.J.; Korman, C.E. Noise in MEMS. Meas. Sci. Technol. 2009, 21, 012001. [Google Scholar] [CrossRef]
- Piyabongkarn, D.; Rajamani, R.; Greminger, M. The development of a MEMS gyroscope for absolute angle measurement. IEEE Trans. Control Syst. Technol. 2005, 13, 185–195. [Google Scholar] [CrossRef]
- Liu, K.; Zhang, W.; Chen, W.; Li, K.; Dai, F.; Cui, F.; Wu, X.; Ma, G.; Xiao, Q. The development of micro-gyroscope technology. J. Micromech. Microeng. 2009, 19, 113001. [Google Scholar] [CrossRef]
- Ren, M.Y.; Zhang, H.F.; Liu, X.W.; Mao, Z.G. High resolution capacitance detection circuit for rotor micro-gyroscope. AIP Adv. 2014, 4, 031336. [Google Scholar] [CrossRef]
- Li, H.; Liu, X.W.; Weng, R.; Zhang, H.F. Micro-angle tilt detection for the rotor of a novel rotational gyroscope with a 0.47 ″resolution. Front. Inf. Technol. Electron. Eng. 2017, 18, 591–598. [Google Scholar] [CrossRef]
- Gabrielson, B. Mechanical–thermal noise in acoustic and vibration sensors. IEEE Trans. Electron. Devices 1993, 40, 903–909. [Google Scholar] [CrossRef]
- Annovazzi-Lod, V.; Merlo, S. Mechanical–thermal noise in micromachined gyros. Microelectron. J. 1999, 30, 1227–1230. [Google Scholar] [CrossRef]
- Djurić, Z. Mechanisms of noise sources in microelectromechanical systems. Microelectron. Reliab. 2000, 40, 919–932. [Google Scholar] [CrossRef]
- Leland, R.P. Mechanical-thermal noise in MEMS gyroscopes. IEEE Sens. J. 2005, 5, 493–500. [Google Scholar] [CrossRef]
- Sun, H.; Jia, K.; Liu, X.; Yan, G.; Hsu, Y.W.; Fox, R.M.; Xie, H. A CMOS-MEMS gyroscope interface circuit design with high gain and low temperature dependence. IEEE Sens. J. 2011, 11, 2740–2748. [Google Scholar] [CrossRef]
- Kim, D.; M’Closkey, R.T. Spectral analysis of vibratory gyro noise. IEEE Sens. J. 2013, 13, 4361–4374. [Google Scholar] [CrossRef]
- Su, T.H.; Nitzan, S.H.; Taheri-Tehrani, P.; Kline, M.H.; Boser, B.E.; Horsley, D.A. Silicon MEMS disc resonator gyroscope with an integrated CMOS analog front-end. IEEE Sens. J. 2014, 14, 3426–3432. [Google Scholar] [CrossRef]
- Xie, J.; Shen, Q.; Hao, Y.; Chang, H.; Yuan, W. Design, Fabrication and Characterization of a Low-noise Z-axis Micromachined Gyroscope. Microsyst. Technol. 2015, 21, 625–630. [Google Scholar] [CrossRef]
- Shen, C.; Li, J.; Zhang, X.; Shi, Y.; Tang, J.; Cao, H.; Liu, J. A noise reduction method for dual-mass micro-electromechanical gyroscopes based on sample entropy empirical mode decomposition and time-frequency peak filtering. Sensors 2016, 16, 796. [Google Scholar] [CrossRef]
- Ding, X.; Jia, J.; Gao, Y.; Li, H. Mechanical and electrical noise in sense channel of MEMS vibratory gyroscopes. Sensors 2017, 17, 2306. [Google Scholar] [CrossRef]
- Utz, A.; Walk, C.; Haas, N.; Fedtschenko, T.; Stanitzki, A.; Mokhtari, M.; Görtz, M.; Kraft, M.; Kokozinski, R. An ultra-low noise capacitance to voltage converter for sensor applications in 0.35 µm CMOS. J. Sens. Sens. Syst. 2017, 6, 285. [Google Scholar] [CrossRef]
- Wang, Y.T.; Yang, Z.; Cheng, P.F.; Li, H.J. Analysis of circuit noise in integral electronics piezoelectric accelerometer. J. Appl. Sci. Eng. 2015, 18, 295–302. [Google Scholar]
- Sutri, N.Y.; Dennis, J.O.; Khir, M.H.M.; Mian, M.U.; Tang, T.B. Chopper stabilized, low-power, low-noise, front end interface circuit for capacitive CMOS MEMS sensor applications. Mod. Appl. Sci. 2013, 7, 34–42. [Google Scholar] [CrossRef]
- Seraji, N.E.; Yavari, M. On the design and optimization of a switched-capacitor interface circuit for MEMS capacitive sensors. In Proceedings of the 2012 20th Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 15–17 May 2012; pp. 286–290. [Google Scholar]
- Ezekwe, C.D.; Boser, B.E. A mode-matching closed-loop vibratory gyroscope readout interface with a 0.004/s/noise floor over a 50 Hz band. IEEE J. Solid-State Circuits 2008, 43, 3039–3048. [Google Scholar]
- Aaltonen, L.; Halonen, K. Continuous-time interface for a micromachined capacitive accelerometer with NEA of 4 g and bandwidth of 300 Hz. Sens. Actuators A Phys. 2009, 154, 46–56. [Google Scholar] [CrossRef]
- Kline, M.H.; Yeh, Y.C.; Eminoglu, B.; Najar, H.; Daneman, M.; Horsley, D.A.; Boser, B.E. Quadrature FM gyroscope. In Proceedings of the 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 604–608. [Google Scholar]
- Krishnan, G.; Kshirsagar, C.U.; Ananthasuresh, G.K.; Bhat, N. Micromachined high-resolution accelerometers. J. Indian Inst. Sci. 2012, 87, 333–361. [Google Scholar]
- Terasawa, T.; Watanabe, T.; Murakoshi, T. Electrostatically levitated ring-shaped rotational-gyro/accelerometer using all-digital OFDM detection with TAD. In Proceedings of the IEEE Sensors 2012, Taipei, Taiwan, 28–31 October 2012; pp. 1–4. [Google Scholar]
- Han, F.T.; Liu, Y.F.; Wang, L.; Ma, G.Y. Micromachined electrostatically suspended gyroscope with a spinning ring-shaped rotor. J. Micromech. Microeng. 2012, 22, 105032. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Micro Gyroscope Noise Source | Equivalent Input Angular Velocity | Calculated Value (°/s/Hz1/2) |
|---|---|---|
| Structural Thermal Sensitive Noise | 6.1 × 10−4 | |
| Driving Interference Noise | 4.6 × 10−3 | |
| Detecting Circuit Noise | 1.8 × 10−5 |
| Sensor Type | Circuit Structure | Static Capacitance (pF) | Sensitivity | Noise Density | Resolution (ΔCMIN/CS) | |
|---|---|---|---|---|---|---|
| [19] | gyroscope | SC | — | — | 0.004°/s/Hz1/2 | 1.3 × 10−8 |
| [20] | accelerometer | CTC | 12 | 3.8 pF/g | 0.3 µg/Hz1/2 | 9 × 10−8 |
| [21] | gyroscope | FM | 6 × 10−3 | — | 0.09°/s/Hz1/2 | 1.67 × 10−8 |
| [22] | accelerometer | SC | 0.88 | 4.576 fF/g | — | 4.94 × 10−9 |
| This paper | gyroscope | CTC | 5 | 0.003°/s | 0.003°/s/Hz1/2 | 1 × 10−8 |
| Parameters | Measurements |
|---|---|
| Supply voltage (V) | ±9 |
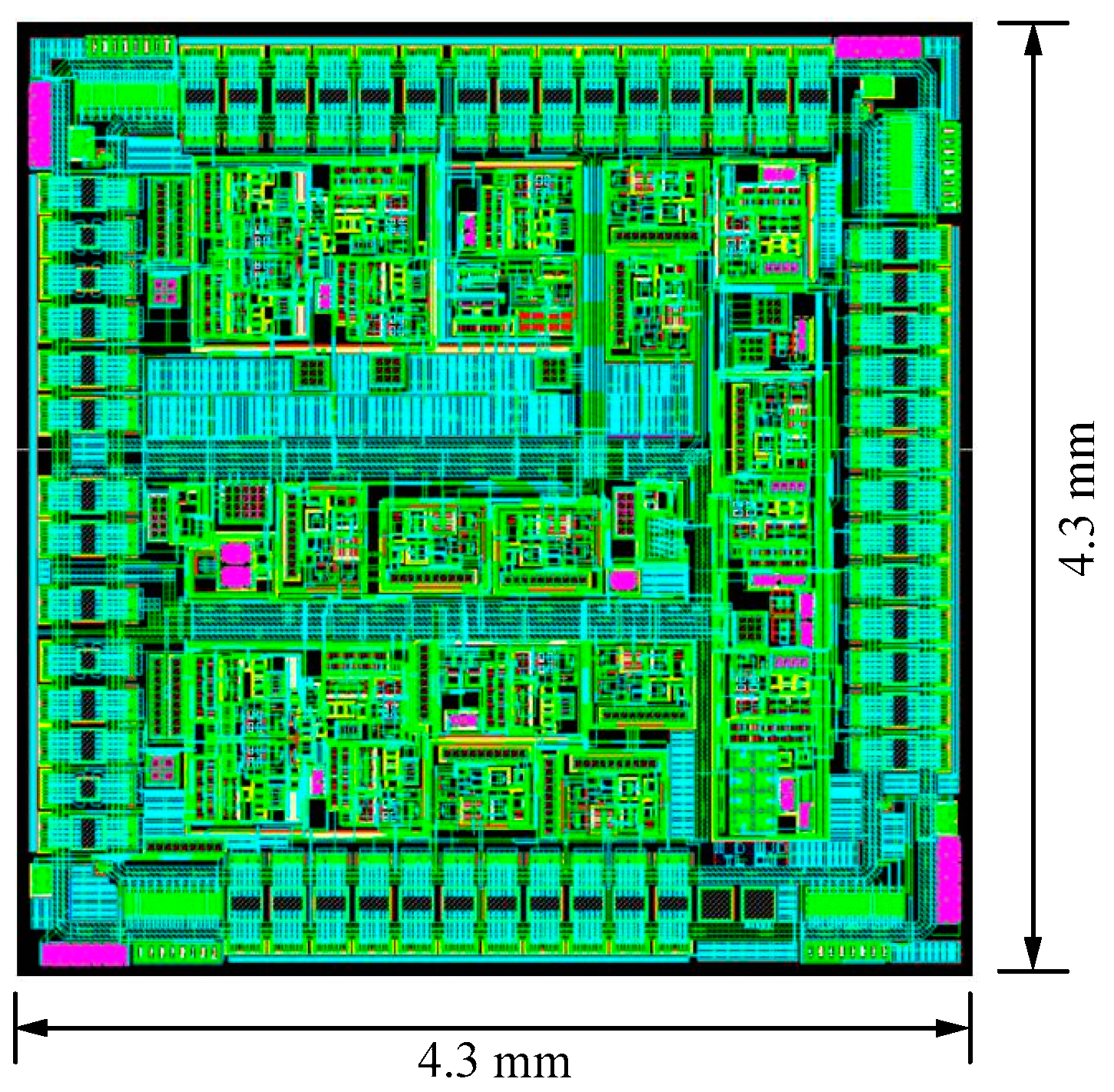
| Area (mm2) | 4.9 × 4.9 |
| Power dissipation (mW) | 30 |
| Flicker noise corner (kHz) | 100 |
| Output voltage range (V) | –8.6–+8.3 |
| Non-linear (%) | 0.02 |
| System output noise at 10 Hz (mV/Hz1/2) | 44.7 |
| Parameters | [24] | [25] | This Paper |
|---|---|---|---|
| Maximum Rotor Speed (rpm) | 58,000 | 12,000 | 20,000 |
| Nonlinear Error (%) | 0.1% | 0.58% | 0.05% |
| Noise Density (°/s/Hz1/2) | 0.03 | 0.015 | 0.003 |
| Measure Range (o/s) | ±200 | ±100 | ±100 |
| Bandwidth (Hz) | 10 | 10 | 10 |
| Sensitivity (°/s) | 0.1 | 0.014 | 0.003 |
| Scale Factor (mV/°/s) | - | 39.8 | 15 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, M.; Xu, H.; Han, X.; Dong, C.; Lu, X. Low Noise Interface ASIC of Micro Gyroscope with Ball-disc Rotor. Sensors 2020, 20, 1238. https://doi.org/10.3390/s20041238
Ren M, Xu H, Han X, Dong C, Lu X. Low Noise Interface ASIC of Micro Gyroscope with Ball-disc Rotor. Sensors. 2020; 20(4):1238. https://doi.org/10.3390/s20041238
Chicago/Turabian StyleRen, Mingyuan, Honghai Xu, Xiaowei Han, Changchun Dong, and Xuebin Lu. 2020. "Low Noise Interface ASIC of Micro Gyroscope with Ball-disc Rotor" Sensors 20, no. 4: 1238. https://doi.org/10.3390/s20041238
APA StyleRen, M., Xu, H., Han, X., Dong, C., & Lu, X. (2020). Low Noise Interface ASIC of Micro Gyroscope with Ball-disc Rotor. Sensors, 20(4), 1238. https://doi.org/10.3390/s20041238