Accuracy Analysis of Measuring X-Y-Z Coordinates with Regard to the Investigation of the Tombolo Effect †

 ,
,  , , and
, , and 
Abstract
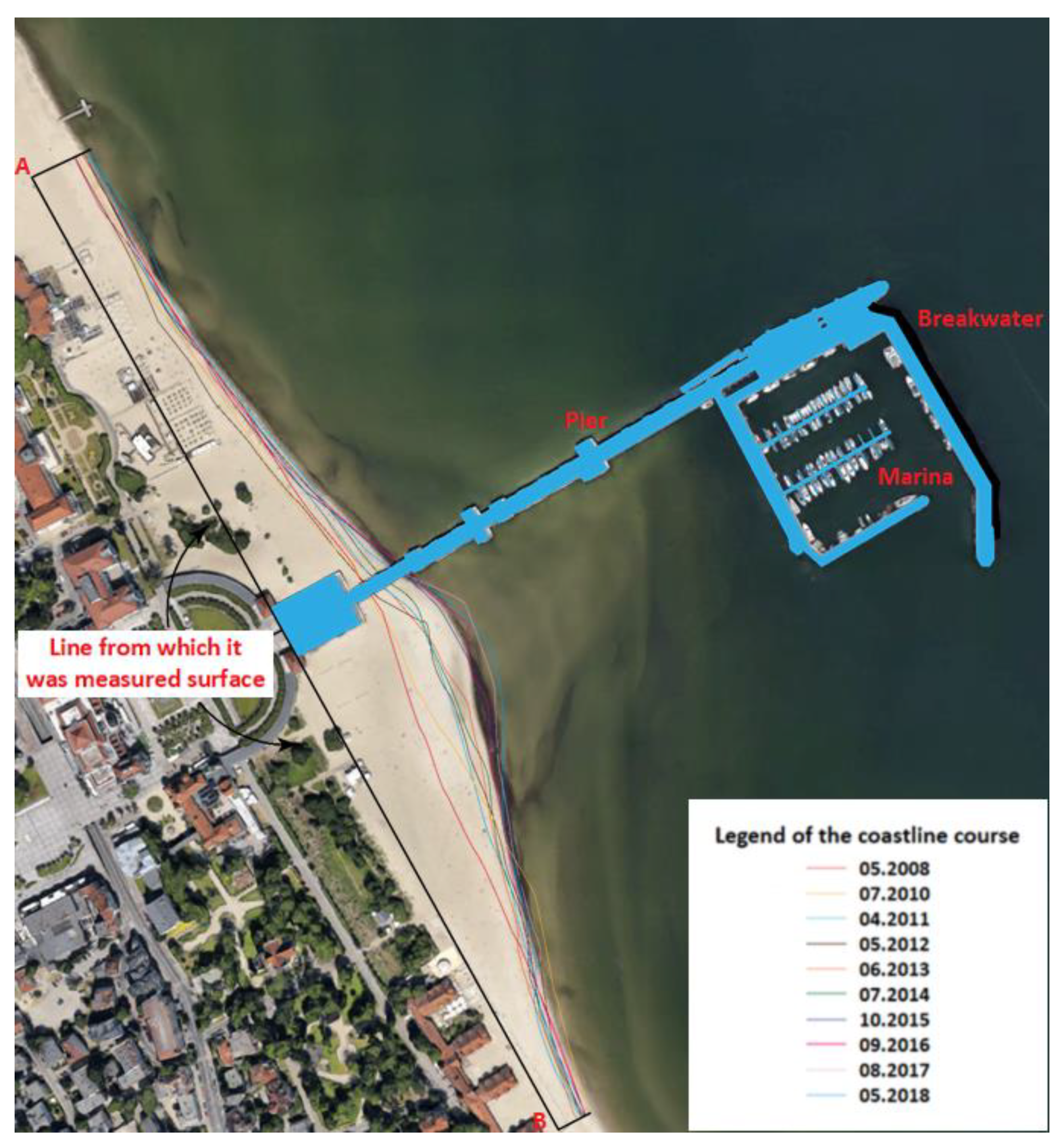
1. Introduction: Tombolo Effect—Polish Case Study
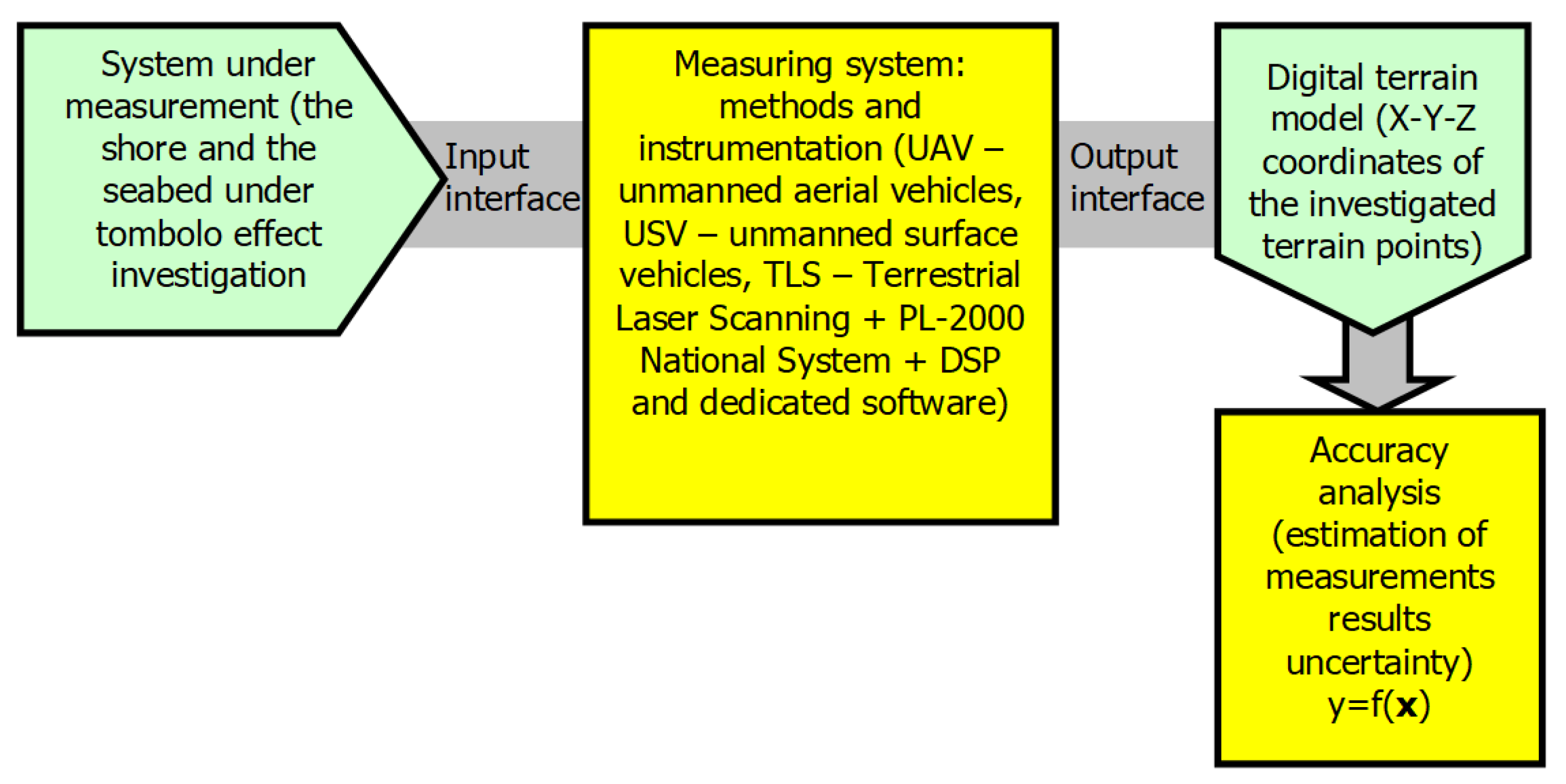
2. Problem to Solve
3. Methodology of Geodetic and Hydrographic Measurements to Illustrate the Studied Area of the Shore and the Seabed
4. Applied Algorithms and Metrological Properties of the Related Measurement Instrumentation
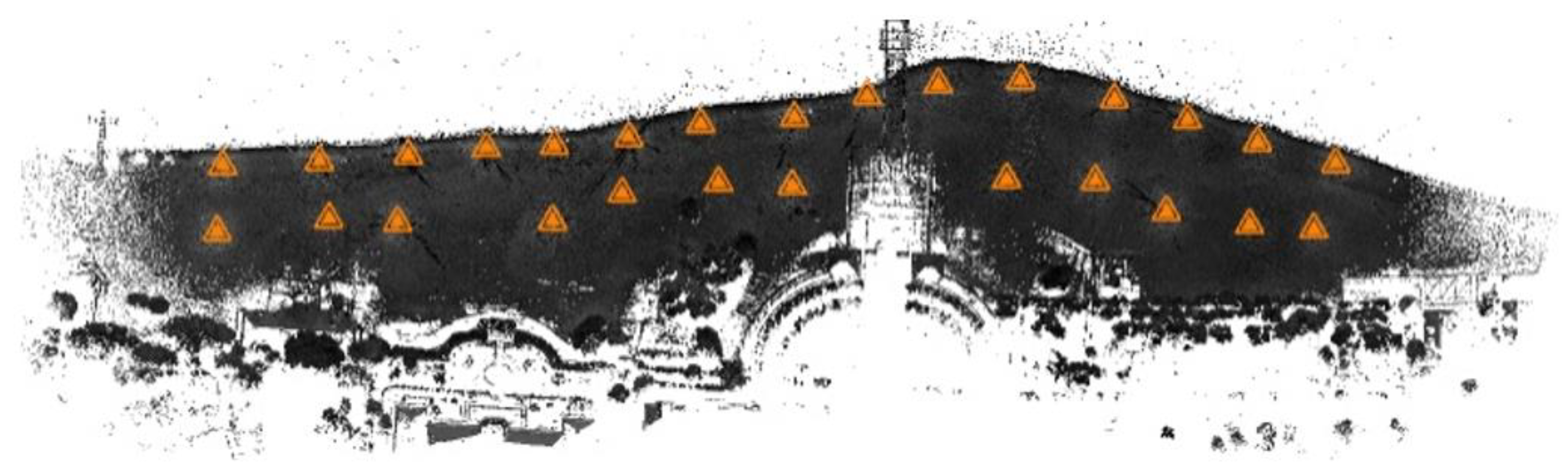
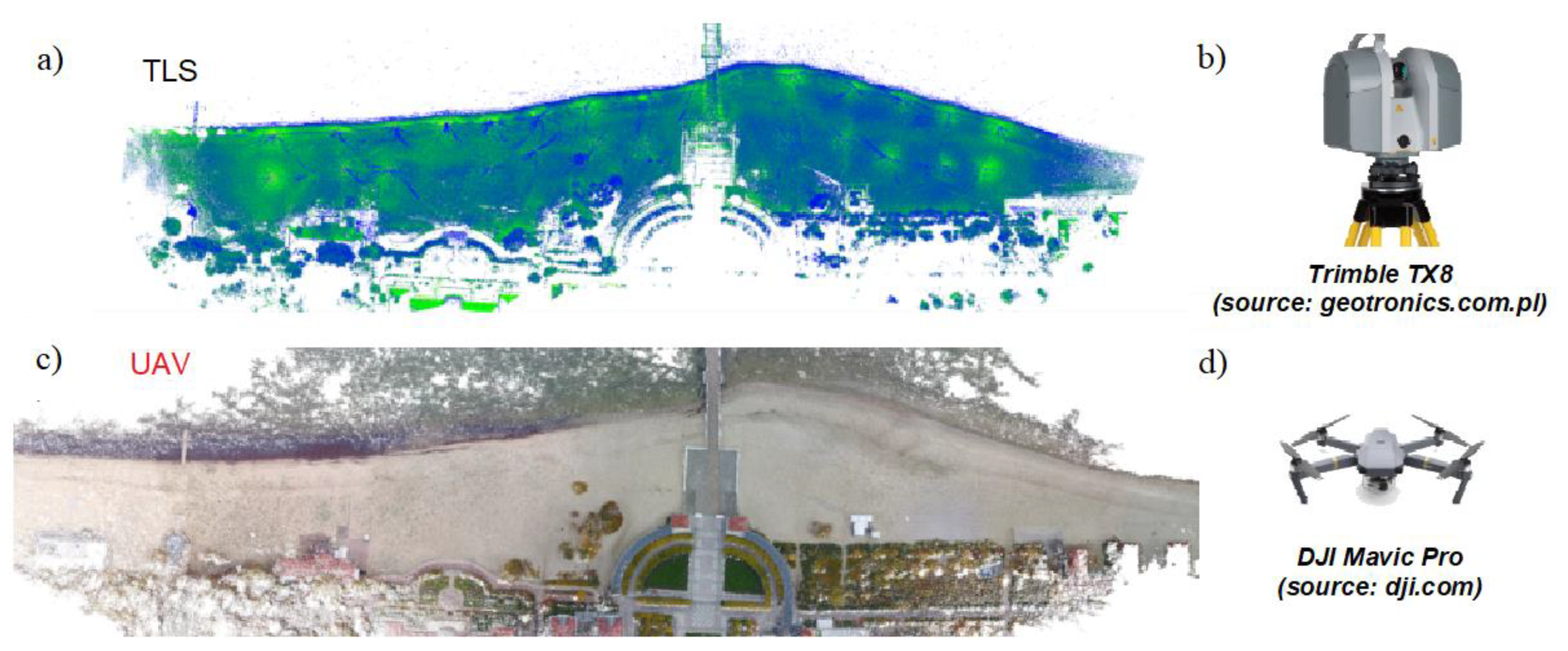
4.1. TLS Method
- Inaccuracy of laser Trimble Tx8—1 cm horizontally and 1.5 cm vertically,
- Inaccuracy of satellite receiver R10 used to determine the coordinates of reference points—1 cm horizontally and 1.5 cm vertically,
- Inaccuracy of the PL-2000 system—2 cm horizontally and vertically.
4.2. UAV Method
- Camera pixel resolution—2.25 cm,
- Inaccuracy of UAV position: X, Y—a few meters, Z—several meters.
4.3. A Proposal on How to Improve UAV Accuracy
5. Accuracy Analysis of the Measurement Results
5.1. Evaluation of Uncertainty
- Evaluation of standard uncertainties of input values for type A evaluation and/or type B evaluation depending on the kind of data,
- Calculation of sensitivity coefficients δy/δxi,
- Calculation of combined standard uncertainty uc(y), and finally,
- Calculation of expanded uncertainty U = k∙uc(y).
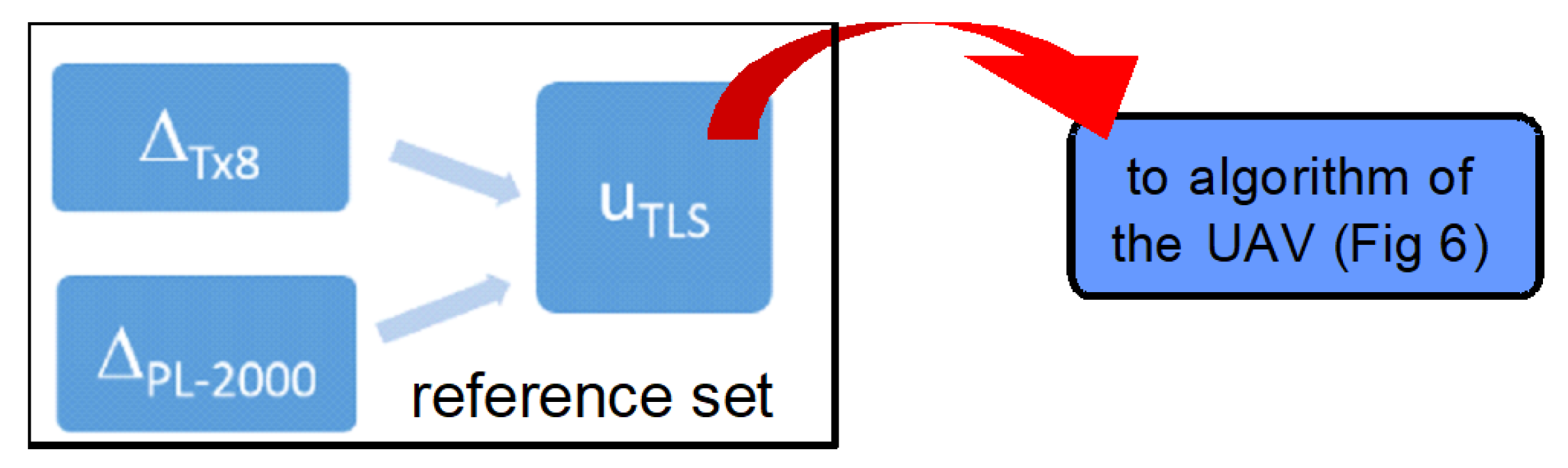
5.2. Case Study Based Evaluation of Uncertainty for TLS Method
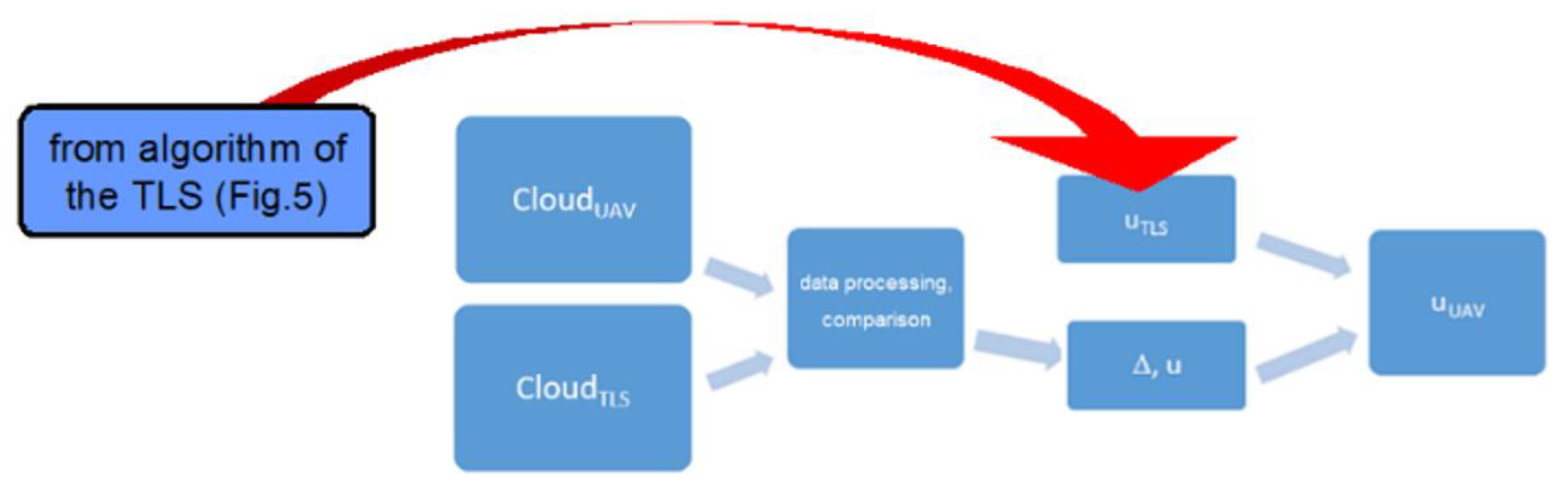
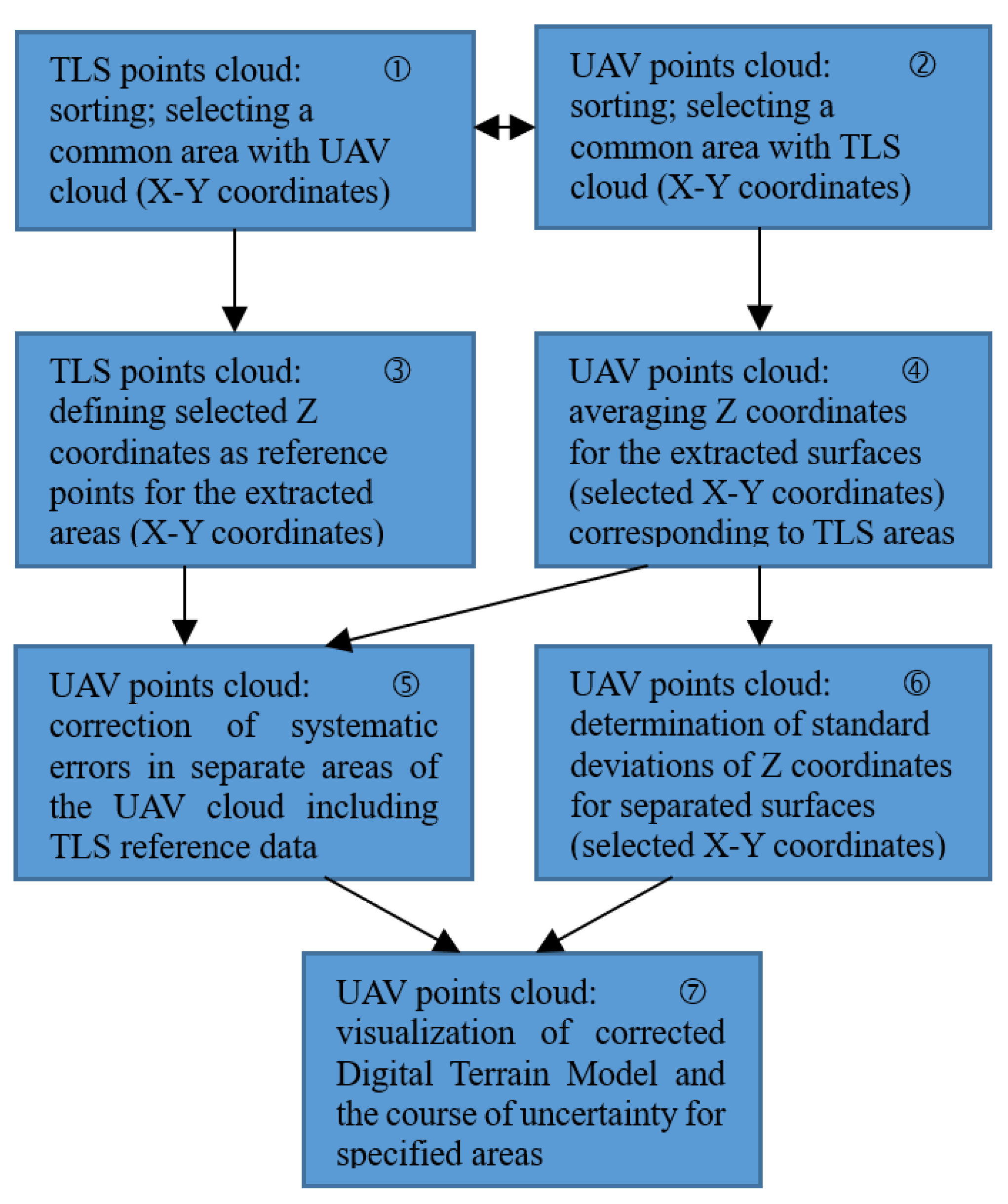
5.3. Future Works—Methodology of Accuracy Analysis for UAV Method
- Organizing point clouds: Sorting by X-Y coordinates,
- Random noise filtering,
- Determining standard deviation within selected areas (UAV),
- Determining systematic interactions by comparing UAV and TLS data, correction of point Z coordinates,
- Presenting the results of the assessment and their analysis.
6. Final Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CMOS | Complementary Metal-Oxide Semiconductor |
| FOV | Field of View |
| GNSS | Global Navigation Satellite Systems |
| GSD | Ground Sampling Distance |
| GUM | Guide to the Expression of Uncertainty in Measurement |
| RAM | Random-Access Memory |
| TLS | Terrestrial Laser Scanning |
| UAV | Unmanned Aerial Vehicles |
| USV | Unmanned Surface Vehicles |
| Nomenclature | |
| X,Y, Z | point coordinates |
| CloudUAV, CloudTLS | clouds of points related to the methods UAV and TLS, respectively |
| x | vector of variables modeling the sources of uncertainty |
| y | variable modeling the quantity whose uncertainty is to be evaluated |
| ΔTx8, ΔPL-2000 | absolute errors corresponding to the Trimble Tx8 laser scanner and PL-2000 national system, respectively |
| ΔXt | maximum permissible error threshold value |
| p(x), p(y) | probability density functions |
| uTLS, uUAV | measurement uncertainties characterizing the TLS and UAV methods, respectively |
| us(x) | standard uncertainty |
| uc(x) | combined standard uncertainty |
| UB(x) | type B expanded uncertainty |
| UBe(X,Y, Z) | 3D equivalent expanded uncertainty |
| Δm | modular error of a vector of the 3D point position |
| Δx, Δy, Δz | Cartesian components of the point position error |
| σp | the positional error standard deviation of a point in the cloud |
| σx, σy, σz | standard deviations in the X, Y, and Z directions |
References
- Specht, C.; Mindykowski, J.; Dabrowski, P.; Masnicki, R.; Marchel, L.; Specht, M. Metrological aspects of the Tombolo effect investigation–Polish case study. In Proceedings of the 2019 IMEKO TC-19 International Workshop on Metrology for the Sea, Genoa, Itlay, 3–5 October 2019; pp. 7–11. [Google Scholar]
- Mohamed, A.S. 2D and 1D Numerical Model Simulations for the Effect of a Single Detached Breakwater on the Shore. Master’s Thesis, Delft University of Technology Publishing House, Delf, The Netherlands, 1997. [Google Scholar]
- IO PAN. Wykonanie badan i prac modelowych dna i brzegu morskiego w okolicy mola w Sopocie. 2019. Available online: bip.umsopot.nv.pl/Download/get/id.32756.html (accessed on 9 June 2019).
- Specht, C.; Dabrowski, P.S.; Specht, M.; Makar, A.; Marchel, L.; Skora, M.; Cywinski, P.; Szychowski, P. Research on the tombolo effect of the marina in Sopot. Available online: https://www.researchgate.net/publication/328998312_Badania_efektu_Tombolo_mariny_w_Sopocie (accessed on 27 January 2020). (In Polish).
- Morawski, R.Z. Technoscientific Research. Methodological and Ethical Aspects; Walter de Gruyter GmbH: Berlin, Germany; Boston, MA, USA, 2019. [Google Scholar]
- JCGM. International Vocabulary of Metrology–Basic and General Concepts and Associated Terms (VIM); BIMP: Saint-Cloud, France, 2008. [Google Scholar]
- Hartzell, P.J.; Gadomski, P.J.; Glennie, C.L.; Finnegan, D.C.; Deems, J.S. Rigorous error propagation for terrestrial laser scanning with application to snow volume uncertainty. J. Glaciol. 2015, 61, 1147–1158. [Google Scholar] [CrossRef]
- Helgesen, H.H.; Leira, F.S.; Bryne, T.H.; Albrektsen, S.M.; Johansen, T.A. Real-time georeferencing of thermal images using small fixed-wing UAVs inmaritime environments. ISPRS 2019, 154, 84–97. [Google Scholar]
- Specht, C.; Koc, W.; Chrostowski, P.; Szmaglinski, J. Accuracy assessment of mobile satellite measurements in relation to the geometrical layout of rail tracks. Metrol. Meas. Syst. 2019, 26, 309–321. [Google Scholar]
- Fritz, A.; Kattenborn, T.; Koch, B. UAV-Based Photogrammetric Point Clouds–Tree Stem Mapping in Open Stands in Comparison to Terrestrial Laser Scanner Point Clouds. In International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 141–146. [Google Scholar]
- Stateczny, A.; Gronska, D.; Motyl, W. Hydrodron–New Step for Professional Hydrography for Restricted Waters. In Proceedings of the 2018 Baltic Geodetic Congress, Olsztyn, Poland, 21–23 June 2018; pp. 226–230. [Google Scholar]
- Specht, C.; Specht, M.; Cywinski, P.; Skora, M.; Marchel, L.; Szychowski, P. A new Method for Determining the Territorial Sea Baseline Using an Unmanned. J. Coast. Res. 2019, 34, 925–936. [Google Scholar]
- Baptista, P.; Bastos, L.; Bernardes, C.; Cunha, T.; Dias, J. Monitoring Sandy Shores Morphologies by DGPS–A Practical Tool to Generate Digital Elevation Models. J. Coast Res. 2008, 24, 1516–1528. [Google Scholar] [CrossRef]
- Specht, C.; Specht, M.; Dabrowski, P. Comparative Analysis of Active Geodetic Networks in Poland. In Proceedings of the 17th International Multidisciplinary Scientific GeoConference SGEM Conference, Albena, Bulgaria, 27 June–6 July 2017; pp. 168–176. [Google Scholar]
- Ruggles, S.; Clark, J.; Franke, K.W.; Wolfe, D.; Reimschiissel, B.; Martin, R.A.; Okeson, T.J.; Hedengren, J.D. Comparison of SfM Computer Vision Point Clouds of a Landslide Derived from Multiple Small UAV Platforms and Sensors to a TLS based Model. J. Unmanned Veh. Syst. 2016, 4, 246–265. [Google Scholar] [CrossRef]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SfM 3D Model Accuracy in High-Relief Landscapes by Incorporating Oblique Images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef]
- Furukawa, Y.; Ponce, J. Accurate, dense, and robust multiview stereopsis. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1362–1376. [Google Scholar] [CrossRef] [PubMed]
- Working Group 1 of Joint Committee for Guides in Metrology, Evaluation of Measurement Data–Guide to the Expression of Uncertainty in Measurement (GUM 1995 with Minor Corrections); JCGM100/WG 1; BIMP: Saint-Cloude, France, 2010.
- Joint Committee for Guides in Metrology, Supplement 1 to the “Guide to the Expression of Uncertainty in Measurement”–Propagation of Distributions Using a Monte Carlo method; ref-JCGM101; BIMP: Saint-Cloude, France, 2008.
- Joint Committee for Guides in Metrology, Supplement 2 to the “Guide to the Expression of Uncertainty in Measurement”–Extension to Any Number of Output Quantities; ref-JCGM102; BIMP: Saint-Cloude, France, 2011.
- Cuartero, A.; Armesto, J.; Rodríguez, P.G.; Arias, P. Error Analysis of Terrestrial Laser Scanning Data by Means of Spherical Statistics and 3D Graphs. Sensors 2010, 10, 10128–10145. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Hua, X.; Zhang, G.; Wu, H.; Xuan, W.; Li, M. Evaluating point cloud accuracy of static three-dimensional laser scanning based on point cloud error ellipsoid model. J. Appl. Remote Sens. 2015, 9, 1–14. [Google Scholar] [CrossRef]
- Stenz, U.; Hartmann, J.; Paffenholz, J.-A.; Neumann, I. High-Precision 3D Object Capturing with Static and Kinematic Terrestrial Laser Scanning in Industrial Applications—Approaches of Quality Assessment. Remote Sens. 2020, 12, 290. [Google Scholar] [CrossRef]
- Akutina, Y.; Mydlarski, L.; Gaskin, S.; Eiff, O. Error analysis of 3D-PTV through unsteady interfaces. Exp. Fluids 2018, 59, 1–19. [Google Scholar] [CrossRef]
- Zeybek, M.; Sanlioglu, I. Point cloud filtering on UAV based point cloud. Measurement 2019, 133, 99–111. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Maximum Error | Probability Distribution | Standard Uncertainty |
|---|---|---|---|
| (X,Y)Tx8 | 1 cm | uniform | uS1 = 0.58 cm |
| (X,Y)R10 | 1 cm | uniform | uS2 = 0.58 cm |
| (X,Y)PL-2000 | 2 cm | uniform | uS3 = 1.15 cm |
| uTLS(X,Y) | uc(X,Y)= 1.41 cm |
| Quantity | Maximum Error | Probability Distribution | Standard Uncertainty |
|---|---|---|---|
| (Z)Tx8 | 1.5 cm | uniform | us1 = 0.87 cm |
| (Z)R10 | 1.5 cm | uniform | us2 = 0.87 cm |
| (Z)PL-2000 | 2 cm | uniform | us3 = 1.15 cm |
| uTLS(Z) | uc(Z) = 1.68 cm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masnicki, R.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Specht, M. Accuracy Analysis of Measuring X-Y-Z Coordinates with Regard to the Investigation of the Tombolo Effect. Sensors 2020, 20, 1167. https://doi.org/10.3390/s20041167
Masnicki R, Specht C, Mindykowski J, Dąbrowski P, Specht M. Accuracy Analysis of Measuring X-Y-Z Coordinates with Regard to the Investigation of the Tombolo Effect. Sensors. 2020; 20(4):1167. https://doi.org/10.3390/s20041167
Chicago/Turabian StyleMasnicki, Romuald, Cezary Specht, Janusz Mindykowski, Paweł Dąbrowski, and Mariusz Specht. 2020. "Accuracy Analysis of Measuring X-Y-Z Coordinates with Regard to the Investigation of the Tombolo Effect" Sensors 20, no. 4: 1167. https://doi.org/10.3390/s20041167
APA StyleMasnicki, R., Specht, C., Mindykowski, J., Dąbrowski, P., & Specht, M. (2020). Accuracy Analysis of Measuring X-Y-Z Coordinates with Regard to the Investigation of the Tombolo Effect. Sensors, 20(4), 1167. https://doi.org/10.3390/s20041167