1. Introduction
The near-space vehicle (NSV) is one type of novel aerospace vehicle, which cannot only make a supersonic cruise in the atmosphere, but also perform multiple missions outside the atmosphere. Due to their superior abilities in space transportation and global strike, NSVs have been widely used in the civilian and military fields [
1,
2]. In comparison to the existing traditional aircrafts, NSVs have unique characteristics, such as multipurpose, multiple working modes, high mobility, large flight envelope, etc. [
3] However, in near space, NSVs suffer from strong nonlinearity, serious multivariate coupling and uncertainties. The particular aerodynamic characteristics and working environment not only bring benefits, but also bring difficulties to controller design [
4]. Many different approaches have been developed in the past few years. Based on the Takagi-Sugeno fuzzy models, an adaptive fault-tolerant control method was put forward for the attitude tracking of NSVs [
5]. By combining the constrained control method and radial basis function neural networks, a new adaptive backstepping controller was proposed for NSVs with parametric uncertainties, external disturbances and input nonlinearities [
6]. To further adapt to the large flight envelope and various task modes, variable-structure near-space vehicles (VSNSVs) were proposed which adopt variable sweep wings and retractable canard wings [
7]. With the improvement in flight performance due to configuration transformation, the challenge of controller design further increases.
It should be noted that the parameters of VSNSVs (including moment of inertia, center of mass, etc.) vary seriously as the structure transforms. The above adaptive control schemes can resolve the parameter uncertainties to some extent, but the characteristics of variable structure are not fully exploited. Utilizing only one mathematical model to describe the motion of VSNSVs cannot reflect the aerodynamic characteristics comprehensively and may bring conservatism to the control design. Therefore, the switched system is introduced to model configuration transformation. The configuration transformation can be regarded as the switching of subsystems. Furthermore, the problem of control synthesis can be addressed on the basis of the switched system. In recent years, fruitful research results have been put forward to handle the controller design problem of morphing aircrafts utilizing switching control [
8,
9,
10]. Zhang et al. [
11] proposed a controller based on a switching linear parameter-varying framework for the tracking problem of flexible hypersonic vehicles. Jiang et al. [
12] investigated a smooth switching linear parameter-varying control method. The parameter set can be divided automatically by a novel set partition method. Cheng et al. [
13] presented a non-fragile linear parameter-varying control scheme for morphing aircraft subject to asynchronous switching and missing data. However, most of the existing literature about switching control for morphing aircrafts conduct simplification in the model by linearization, which means the model parameters can be acquired accurately and the nonlinear dynamics are underutilized. To tackle this problem, we adopt the switched nonlinear system to model the VSNSV dynamics. Even though switched nonlinear system has been generally researched in the last few years [
14,
15,
16], the achievements for VSNSV control are rare and are yet to be further developed.
Moreover, as a practical physical control system, actuator saturation, safety specifications and command tracking performance are ubiquitous. Hence, state constraints which may lead to control effect degradation, and even instability and actuator faults, should be given attention [
17]. There have been various approaches to deal with state constraints, such as model predictive control [
18], reference governors [
19], etc. One of various efficient approaches is the barrier Lyapunov function (BLF)-based control scheme, in which the value of the function approximates infinity when its arguments approach the constraints [
20,
21]. Yu [
22] proposed a novel adaptive output feedback control for nonlinear systems with constant state constraints by utilizing command-filtered backstepping and state observer. Xu [
23] used a method based on a combination of BLF, adaptive allocation law, and composite learning for hypersonic flight vehicles with an angle of attack constraint. Liu [
24] presented reinforcement learning control to address prescribed tracking performances for hypersonic vehicles in the presence of external disturbances and heterogeneous uncertainties. However, the state constraints considered in the aforementioned literature are restricted by constant compact sets. Variable-structure near-space vehicles can make a cruise in a large flight envelope, and therefore the state constraints cannot always be kept constant. Time-varying state constraints can be more suitable for practical flight situations. To the best knowledge of the authors, existing research on time-varying state constraints for VSNSVs is rare. Liu [
25] provided an adaptive control method for nonlinear systems subject to time-varying state constraints. Novel time-varying asymmetric barrier Lyapunov functions were designed in each step of backstepping to guarantee the constraints are not overstepped. However, the external disturbances were not considered in [
25], and the ‘explosion of complexity’ problem due to the repeated differentiation of virtual control signals was not addressed.
In addition, considering the complicated environments in which VSNSVs work, strong wind disturbances, variations of temperature and structure deformation lead to external disturbances and parametric uncertainties which further bring difficulties in the controller design [
26]. Over the past few decades, the problem of external disturbances has been investigated extensively [
27]. de Jesús Rubio [
28] proposed a robust linearization method for nonlinear process control, and the controller was applied to the fuel cell and manipulator. Kumar et al. [
29] investigated an intelligent adaptive fractional order fuzzy sliding mode proportional integral and derivative controller for a two link robotic manipulator system. Rubio [
30] put forward a structure regulator for the perturbation attenuation on the basis of the infinite structure regulator. The active disturbance rejection control (ADRC) scheme, based on extended state observer (ESO), can be an effective way to weaken the influence of external disturbances and modeling uncertainties. The essential philosophy of ADRC is to regard internal dynamics and external disturbances as extended states and estimate them utilizing an observer, then compensate it in controller design [
31,
32,
33]. The ADRC scheme has a wide range of applications in many fields, such as hypersonic reentry vehicles [
34], forced Duffing mechanical systems [
35], inverter systems [
36], permanent magnet synchronous motors [
37], etc. Beltran-Carbajal et al. [
38] put forward an output feedback control for a linear mass-spring-damper mechanical system, and an asymptotic estimation method was proposed to estimate the velocity, acceleration and disturbance signals in order to reduce the number of sensors. In [
39], a novel output feedback control based on a generalized proportional integral observer for stabilization and robust tracking control of a nonlinear magnetic suspension system was investigated. Wang et al. [
40] proposed a motion synchronization control technique based on linear extended state observer to handle the force fighting problem in hybrid actuation system. Zhao and Guo [
41] developed an ESO-based output feedback controller for multi-input multi-output systems with mismatched uncertainty. Ran et al. [
42] expanded ADRC to uncertain nonlinear systems with input time-delay based on a novel ESO. Nevertheless, there is little extant literature on the application of ADRC technology in switched nonlinear systems, and ADRC combined with time-varying asymmetric BLF also brings challenge to controller design. Motivated by the facts stated above, we consider the time-varying asymmetric BLF and active disturbance rejection control technology for VSNSV attitude tracking, in order to tackle disturbances and time-varying state constraints simultaneously.
In comparison to the current study achievements, the main contributions of this paper can be summarized as listed below.
(1) An ESO is designed to derive the accurate estimation of total disturbances for the attitude angle and angular rate subsystems. The ESO possesses two distinct linear regions to reduce the effect of peaking value problem.
(2) Time-varying asymmetric BLF is utilized to guarantee that the states of VSNSVs always remain in the time-varying constrained sets.
(3) The attitude motion of VSNSVs is modeled in the form of switched nonlinear system and the backstepping method is applied. To avoid the inherent problem of the ‘explosion of complexity’, a modified dynamic surface controller is developed. The proposed control scheme has extensive applicability compared with the existing literature.
This paper is laid out as follows. The attitude motion of VSNSVs is represented in
Section 2. The extended state observer for dynamics of VSNSVs is proposed in
Section 3. The controller on the basis of time-varying asymmetric barrier Lyapunov functions is proposed in
Section 4. The rigorous stability analysis is put forward in
Section 5. The numerical simulation results are given in
Section 6, followed by conclusions in
Section 7.
2. Mathematical Model of VSNSV
The VSNSV is shown as
Figure 1. The maneuvering of the VSNSV is mainly executed by the engine thrust and aerodynamic control surfaces including horizontal canards, vertical tail and trailing edge elevons, which are mounted on the variable sweep wings. The horizontal canards retract at the supersonic and hypersonic speed. The sweep angle
can vary with different conditions of the flight. Specifically, the sweep angle keeps at
when the vehicles carry out a supersonic flight, and the sweep angle keeps at
during a hypersonic flight. Various structures possess different parameters, such as dynamic coefficients and the wing area. As indicated in
Figure 1, the deflection angles of the left elevon, right elevon and rudder can be denoted as
,
and
, respectively.
The attitude dynamics of the VSNSV are described in the form of switched nonlinear system as following:
where
denotes the attitude angle vector, including the angle of attack
, the sideslip
, and the bank angle
.
denotes the angular rate vector, including the roll rate
, the pitch rate
, and the yaw rate
.
and
denote the total disturbances, which include modeling uncertainties and external disturbances.
denotes the switching signal, which is determined by sweep angle
.
is the set of switching signals composed by right-continuous piecewise constant functions. Each value in
represents a stage in which the sweep angle takes a constant value.
denotes the control torque vector generated by control surfaces. The other variables in Equation (1) can be represented as
where
and
denote the mass and velocity of VSNSV, respectively.
,
, and
denote the dynamic pressure, flight-path angle, and wing area, respectively.
and
are the aerodynamic coefficients.
,
, and
denote the roll, pitch, and yaw moments of inertia, respectively.
denotes the engine thrust. In this study, the research focus is the attitude control of VSNSVs, which is steered by the control torque
; thus,
is assumed to be a constant value without loss of generality [
10].
The control object is to steer the VSNSV to track the desired attitude trajectory under the condition of internal parametric uncertainties and external disturbances. Meanwhile, the state constraints are not violated. Specifically, , , for , where , , , , , and .
To guarantee that the control objective is achievable, the following assumptions are proposed.
Assumption 1. The desired trajectory of the attitude angleis continuous and twice differentiable with an unknown boundsuch that. There exist functionsandsatisfying,, andfor.
Assumption 2. For any, the compound disturbances,forand their derivatives are bounded whereandThere exist the positive constants,,andsatisfying that,,, andfor, respectively.
Assumption 3. There exist positive constants,,,,satisfying,,,,.
Remark 1. Assumptions 1–3 are reasonable for VSNSV attitude tracking control. Assumption 1 guarantees that the trajectory tracking is achievable, and can be found in the extant literature about attitude tracking control for near-space vehicles [
2,
4,
11]
. The total disturbance considered in this paper is mainly composed by modeling uncertainties and external disturbances. The accurate model parameters and the approximate parameters we used to design the controller are all bounded. The accurate parameters and the approximate parameters are all determined by the flight environment and vehicle structural parameters, which can only continuously smoothly change. Therefore, the modeling uncertainties and their derivatives are bounded. On the other hand, the external disturbances are caused by complicated temperature variation, wind disturbances, etc. As a practical physical system, the external disturbances and their time derivatives are apparently bounded. Therefore, Assumption 2 is also fairly mild and common in the literature on ESO design [
40,
41,
42]
and near-space vehicles-related disturbance rejection control [
6,
11,
34]
. Assumption 3 can be found in the literature in which output or states are constrained in time-varying sets, and guarantees that the constraints can be achieved [
21,
25]
. Remark 2. The uncertain dynamics are considered in the total disturbance-and-in this paper. Many researchers have proposed control schemes to tackle the uncertain dynamics in the attitude motion of vehicles. Adaptive fuzzy systems are introduced to approximate the unknown functionsin the flight dynamic model, and the parameters are updated online [
5,
26]
. The radial basis function neural networks are proposed to estimate the combination of parametric uncertainties and external disturbances [
2,
6]
. The adaptive dynamic programming or iterative learning control are adopted to carry out auxiliary control or derive more accurate model parameters through online learning [
43,
44]
. In the process of the sweep angle changing, uncertainties due to uncertain vehicle structural parameters and external disturbances severely change. The above adaptive control schemes enhance the control effect through multiple iterations and online learning, making it not suitable for fast varying models. Therefore, we tackle the uncertain dynamics as part of the total disturbance and estimate it through the proposed high-gain observer. The modified observer can track the total disturbance in a short time with the help of two linear regions. The following lemmas are useful to establish strict proof for the theorems in this paper.
Lemma 1 [25].Forand positive integer, the following inequality holds Lemma 2 [21].Considerandare open sets. And the system
where
and
is piecewise continuous in
and locally Lipschitz in
, uniformly in
on
. Suppose that there exist continuously differentiable and positive definite functions
and
, such that
where
and
are class
functions. Define
. If
and the following inequality is true
in the set
, where
and
are positive constants, then
for
.
3. Extended State Observer Design
In this section, an ESO for disturbances estimation is designed. The state and extended state in the ESO system are both three-dimensional vectors to guarantee that the ESO can be directly applied in the attitude angle and angular rate subsystems of VSNSVs.
Consider the nonlinear system as follows:
where
,
denotes the input signal vector,
denotes the total disturbance, and
are both matrixes of system parameters. Then, Equation (2) is in the same form as attitude angle and angular rate dynamics in Equation (1).
Assumption 4. The disturbanceis bounded and differentiable with constant bound such that,.
Remark 3. Assumption 4 is common in the extant literature regarding ESO [
36,
37]
and near-space vehicle adaptive control [
11,
32]
, and guarantees the boundedness of total disturbance and its derivative. Choose
as the extended state of nonlinear system, and the corresponding extended state observer is designed as
where
and
are the estimated state vectors,
,
,
,
,
are all positive constants to be designed, and
. For any state
,
, where
is the general definition of saturation function defined as
.
Then, the conclusion for the presented ESO is derived as follows.
Theorem 1. Consider the nonlinear system in Equation (2), and Assumption 4 holds, if the extended state observer is designed as Equation (3), then there exist the positive constants,,,, andwhich satisfy that the estimation errorsandwill converge to a desired small neighborhood of zero for, whereandare constants dependent onand.
Proof. Define the estimation errors for system state and disturbance as
,
, and
, respectively, and the estimation errors vector as
,
. The derivatives of the
and
can be written as
□
Choose the Lyapunov function candidate as follows
where
,
, and
are positive diagonal matrixes,
is a positive constant,
. The Lyapunov function candidate
is used to prove the boundedness of the estimation error
.
Considering the first three terms on the right side of Equation (5), by taking
and
, it can be guaranteed that
For the integral term in Equation (5), is an odd function of for . It can be verified that Therefore, is a positive defined and reasonable Lyapunov function candidate.
The dynamic of
can be computed as
Choose
,
,
, and
according to the following restrictions
Then, Equation (7) can be rewritten as
Furthermore, select the corresponding parameters such that
and
and the following holds
In order to clearly express the proof process, two compact sets are defined as and , where and are both positive constants, such that and . We complete the proof by the following two steps.
Step 1. First, we analyze the boundedness of with help of the Lyapunov function candidate . If , there exists a time satisfies that for . This step is divided into two cases based on different simplification modes of .
When
, for
i = 1, 2, 3, it can be verified that
Combined with Assumption 4, Equations (5) and (9) can be rewritten as
where
,
, and
. Combined with Equation (10) and
, it can be guaranteed that
.
Take
, and it can be verified
where
.
When there exists a
, for any
, it can be verified that
For the simplicity of expression, the number of that satisfy is denoted by for , and denote as the number of that satisfy , for .
Substituting Equation (15) into Equations (5) and (9) yields
where
,
is the j-th diagonal element of the matrix
,
, and
.
Choose an appropriate
such that
and we can arrive at
where
.
Comprehensively analyze the above two situations as shown in Equations (14) and (18), combined with the comparison principle of ordinary differential equations, it can be achieved that
where
, and
.
From Equation (19) it can be concluded that , for . This means that once , decreases until again.
Step 2. In this step, we prove the main conclusion of Theorem 1. The following analysis in on the basis of
, which means
, for
. The condition holds when
. Compute the derivatives of
and
as follows
Choose the Lyapunov function candidate as
The Lyapunov function candidate is different from which is used to prove the boundedness of .
By the help of Young’s inequality, it can be verified that
Considering the relation between , , and in Equation (8), is positive define and a reasonable Lyapunov function candidate.
Combined with Equation (8), computing the dynamics of
yields
Substitute Equation (21) into Equation (23) and we can get
where
,
.
It can be seen that when
exceeds
Combined with the comparison principle of the ordinary differential equations, it can be derived
Considering the definition of
and
, we can deduce that there exists a constant
that satisfies that
for
. Then, for
, where
, it can be achieved that
Furthermore, combined with Equation (22), we can arrive at
From Equations (29) and (30), it can be noted that and converge to a desired small neighborhood of zero for . The proof of Theorem 1 has been completed.
Remark 4. It should be pointed out whetherdetermines the form of the ESO due to the saturation function, for. When, for, the corresponding ESO system becomes the following Apparently, the estimation error
lies in the linear region of the saturation function, and the ESO has a relatively slower dynamic characteristic due to the larger parameter
. When
, for
, the ESO dynamics have the following form
It can be seen that the smaller parameter
guarantees that the ESO system works in higher linear gain. In most of the existing literature about disturbance observers, there exists a tradeoff between the fast reconstruction of the states and the steady-state error [
40,
41,
42]. High gain disturbance observers can attenuate the steady-state estimation error due to the modeling uncertainty, but increasing the gain leads to a higher sensitivity to measurement noise. The tradeoff seriously limits the performance of the disturbance observer. From the above analysis, we can see that when the estimation error is big as
, the observer works in the region of the larger gain for fast state reconstruction, and when the estimation error is small as
, the observer forces a smaller gain to reduce the effect of noise. The sliding mode-like terms (the terms with
) are introduced to improve the effect of the extended state observer [
32].
Remark 5. Considering the ESO out of saturation in Equation (31), rewrite the derivatives of estimation errors as follows
where
. The matrix form in Equation (32) is similar to the high-gain observer in [
33,
37]. Therefore, the design method of parameters can refer to the existing literature [
33,
37]. Based on pole assignment, the specific selection principle is to make the eigenvalues of
have negative real parts with modest absolute values. For example, a common solution is
and
, where
is a positive constant, and the eigenvalues of
are both
. In addition, from Equation (29) and Equation (30),
should be chosen far less than 1 with the purpose of achieving smaller estimation errors bounds.
should be set that
to guarantee the different observer characteristics in two linear regions, as described in Remark 4.
4. Controller Design
On the basis of the multiple-time-scale characteristics of VSNSVs [
10], the angular rate system has faster dynamic performance, which is called fast-loop, and correspondingly the attitude angle system is the slow-loop. Hence, in this section, we design controllers for attitude angle loop and angular rate loop, respectively. The ESO described in Equation (3) is introduced to estimate the total disturbance in each loop. In this paper, the change of sweep angle
is time-driven, and the switching signals
are therefore independent parameters as in [
10]. For any
, the sweep angle
remains at a specific value, and the control law is designed for each subsystem along the backstepping control scheme.
4.1. Control Law Design for Attitude Angle System
Considering the first equation in the VSNSV dynamics (1), regard
as the extended state, and the ESO designed in Equation (3) is introduced as follows to estimate the total disturbances
.
where
,
,
,
, and
are positive constants to be selected and
.
According to the Theorem 1 and Assumption 2, it can be guaranteed that there exist , , , , and such that the estimation errors and will converge to a desired small neighborhood of zero for , where is a positive constant related to and . In particular, we suppose for .
Define the attitude angle tracking error as
for
, and the derivate of
is
Consider the time-varying asymmetric BLF candidate as
where
,
,
is a positive integer and
On the basis of the definitions of and , and utilizing Assumptions 1 and 3, it can be verified that , , where , , , and are all constants.
For the convenience of expression, we make change of coordinate as
Then, Equation (35) can be rewritten as
Apparently, under the premise of
,
is positive, definite and continuously differentiable. Combined with Equation (34), the dynamics of
is
The nominal virtual control signals are designed as
where
and
are both positive constants to be selected. The determinant of
is
which cannot be zero, because the sideslip
stays in
. Considering the definition of
as in Equation (36),
, where
and
are both positive.
is positive under the premise
. Then, the nonsingularity of Equation (39) can be guaranteed. The time-varying gain has the following form
where
is a positive constant to be designed, and
is an odd saturation function defined as
where
and
.
Introduce the modified dynamic surface technology to derive the derivative of virtual control. The modified first-order filter is designed as
where
is a time constant and
is the sum of the terms on the i-th column of
.
Define the first-order filter error as
, and the virtual tracking error as
for
. Substituting Equation (39) into Equation (38), one can arrive at
where
for
.
Define a compact set , where is a positive constant. Define a compact set , where is a positive constant.
Obviously, is a continuously differentiable function of , , , , , , , and for . For , the ESO designed in Equation (33) becomes the form of Equation (31), where is the time when switching to the k-th subsystem. Hence, is continuously differentiable. Under the premise of , we get . Noting that and considering Assumptions 1, 3, is bounded. Combined with the boundedness of , we obtain that is bounded and moreover assumed to be , where is a positive constant.
The time derivative of
can be computed as
where
is a continuous function. It can be verified that
is bounded on
and assumed to be
for
, where
is a positive constant. From Equation (41) we have
then
is bounded on
.
Combined with Assumption 2, we can get
With the help of Young’s inequality, it can be verified that
Considering the definition of
in Equation (40), it can be noted that
Substituting Equations (43)–(45) into Equation (42) yields
where
.
Utilizing Young’s inequality, we can get
Then, Equation (45) can be rewritten as
4.2. Control Law Design for Attitude Angular Rate System
Considering the second equation in (1), choose
as the extended state, and introduce the ESO as in Equation (3) to estimate the total disturbances.
where
,
,
,
, and
are positive constants to be designed, such that
.
On the basis of Theorem 1 and Assumption 2, it can be concluded that there exist , , , , and such that the estimation errors and will converge to a small region of zero for , where is a positive constant determined by and . Specifically, we suppose for .
Define the attitude angular rate tracking error as
for
. The dynamics of
is
Choose the time-varying asymmetric BLF candidate as
where
and
will be specified later on.
Introduce change of coordinate as
Then, Equation (51) can be rewritten as
It is clear that under the premise of , is a rational Lyapunov candidate which is positive definite and continuously differentiable.
Consider Equation (50) and the derivative of
can be written as
The actual controller can be designed as follows
where
and
are positive constants,
for
, and
is the time-varying gain, shown as
where
is a positive constant.
Noting
for
and taking Equation (55) into Equation (54) leads to
where
for
.
Considering Assumption 2, we have
Combined with Young’s inequality, the following inequality holds:
Substituting Equations (58) and (59) into Equation (57) yields
5. Stability and Performance Analysis
In this section, the stability of the tracking error is discussed. Define a compact set , and we need the following lemma to assist in completing the proof.
Lemma 3 [20].
The conditionholds true if and only if,holds true if and only if, for. Theorem 2. Consider the VSNSV attitude motion formed of the closed-loop nonlinear switched system (1), the extended state observers Equation (33), Equation (49), the virtual control input Equation (39), the control signal Equation (55), and the modified first-order filters (41) and that Assumptions 1–3 are satisfied. For bounded initial conditions, satisfy that,,for, and the proposed control scheme guarantees the following characteristics:
(1) The tracking errors and are bounded by and for , where , , , and will be defined later on.
(2) The asymmetric time-varying state constraints are not violated, such as , , for .
(3) All signals in the closed loop are bounded.
(4) The system output tracking errors converge to a desired neighborhood of zero.
Proof. For the
k-th subsystem of VSNSV, consider the Lyapunov candidate as follows
□
Combined with Equations (41), (48) and (60), and compute the time derivate of
as
Noting that and for , where is the time when switching to the k-th subsystem, .
Then Equation (62) can be simplified as
Utilizing Lemma 1, we can arrive at
in the set
, where
,
.
Considering the definition of , , analyze the initial conditions and we can get . Combined with , it can be verified that and for , as follows from Lemma 3. With the help of Lemma 2, we have and , for . Utilizing Lemma 3 again, we can get and for . Therefore, the condition for can be guaranteed.
By solving the differential equation in (64), we have
where
From the definition of , we have and . Furthermore, we can get and . Considering Equation (36) and Equation (52), it can be concluded that and , where , , , and . Moreover, we can prove , where for .
Noting that in the previous analysis in
Section 4.1,
is bounded with
,
,
,
,
,
,
and
should be designed to guarantee
for
. Noting that
for
,
is guaranteed as long as
,
. Furthermore, considering the control law in Equation (55), the boundedness of
can be guaranteed.
From Equation (65), we further arrive at
Along with , Then the attitude tracking error can be arbitrarily small with appropriate and for . The proof is completed.
Remark 6. Considering the size of tracking residual and the convergence rate as shown in Equation (66),should be set to be large enough,should be set as small, andshould be a small positive integer. Furthermore, combined with the definition of, we need to choose a largeandand a small. Combined with the definition of, a largeandcan increase the convergence rate. Considering Equations(40) and (56),and should be positive and large.
Remark 7. The problem of the ‘explosion of complexity’ is tackled via the dynamic surface control scheme, which uses a modified first-order filter to synthetic input at two steps of controller design. In the generic dynamic surface control scheme, the coupling terms such asin Equation (48) and Equation (62) are decoupled with the help of Young’s inequality, which needs the hypothesis that there exists the upper bound of[45,46]. The hypothesis seriously increases the conservativeness of controller design. It should be pointed out that in this paper we present a modified dynamic surface, as in Equation (41). The last term in the first-order filtereliminates the coupling termin order to avoid the priori knowledge of.
6. Numerical Simulation
To confirm the superiority and effectiveness of the proposed controller, a numerical simulation was conducted compared with the approach in [
10]. The aerodynamic coefficients of VSNSVs are from [
47]. The wing sweep angle
changed between
and
, and the flight characteristics when
and
are described by subsystems
and
, respectively. The VSNSV was assumed to carry out a flight at the speed of 1250
and at an altitude of 30
. The initial condition was set as
,
,
,
, and
. During the simulation,
varied from
to
and the subsystem
was activated at
. Next,
varied from
to
, and the subsystem switched to
at
. To demonstrate the validity of the designed extended state observer,
uncertainties of the aerodynamic coefficients were considered. The external disturbances imposed on the attitude angle loop and angular rate loop were set as
and
for the subsystem
,
and
for the subsystem
.
The desired outputs were for , for , , . Obviously, the command signal was continuously differentiable. The state constraints were for , for , , , , , and .
Based on the extended state observer designed in
Section 3 and the parameter selection principle in Remark 5, the corresponding parameters were chosen as
,
,
,
,
for the attitude angle system ESO,
,
,
,
,
for the angular rate system ESO. The ESO parameters for subsystems
and
were the same. According to the control scheme proposed in Remark 6,
,
,
,
,
,
and
,
,
,
,
,
. The first-order filter was designed with the time constant
for the two subsystems.
The simulation results are shown in
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11 and
Figure 12.
Figure 2,
Figure 3 and
Figure 4 are comparison curves of attitude angle tracking performance.
Figure 5,
Figure 6 and
Figure 7 are comparison curves of angular rate performance. It can be seen that the desired signals are well tracked in the presence of aerodynamic coefficient uncertainties and external disturbances. The time-varying state constraints are not overstepped. Within a short time after the switching occurs, the tracking errors converge to a small residual set of zero. The attitude angle tracking errors are less than
for
. It should be pointed out that the angular rate responses in [
10] exceed the state constraints at the beginning of the simulation, as shown in
Figure 5,
Figure 6 and
Figure 7. With the help of the time-varying asymmetric BLF, the amplitudes of the state responses are all within a reasonable scope.
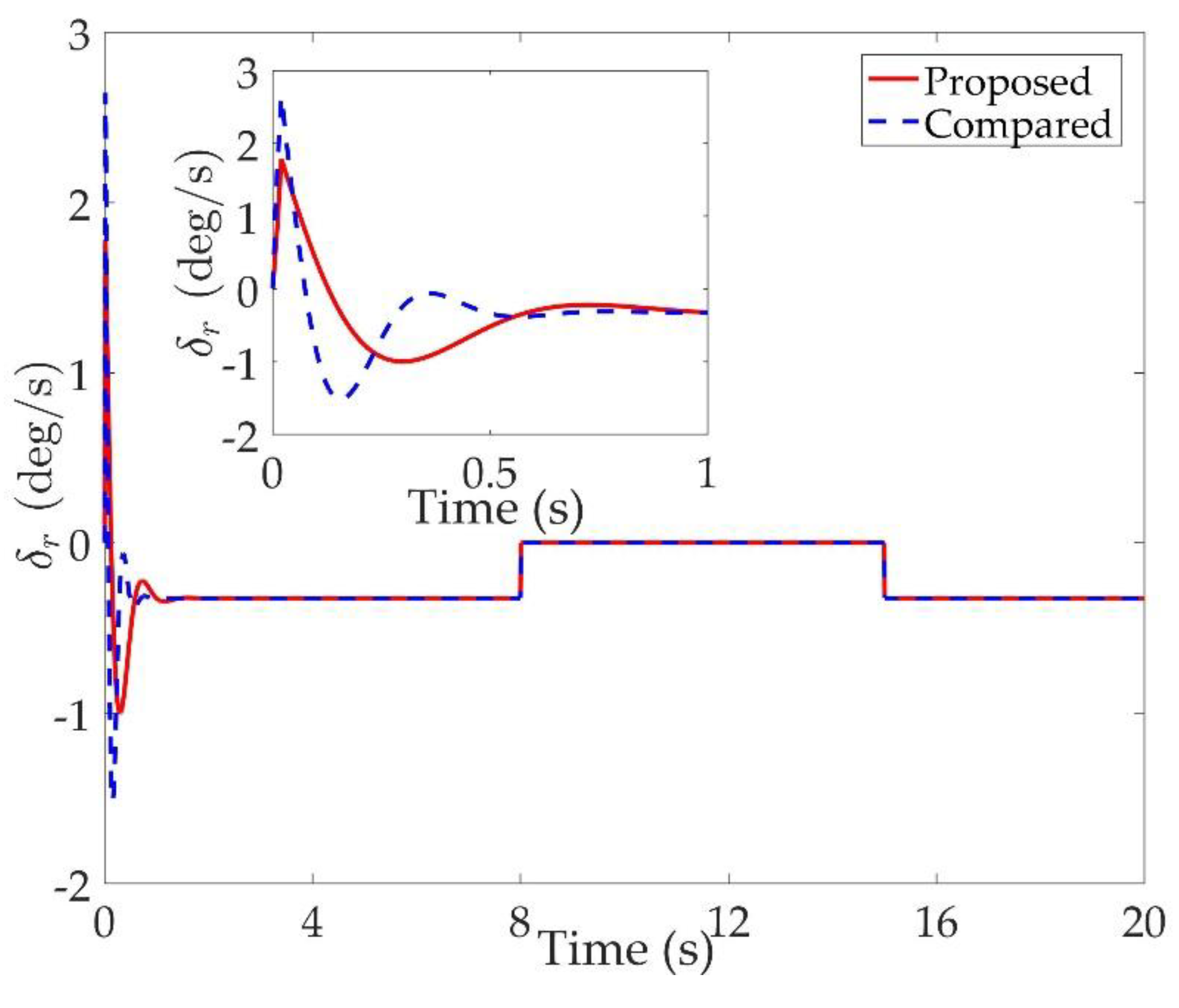
Figure 8,
Figure 9 and
Figure 10 are comparison curves of control inputs. The control surface deflection angles in the proposed controller have smaller amplitudes and transition rates. It can be seen that the tracking curves of the proposed controller are slower than those compared, but the compared control law cannot guarantee that the states stay in the time-varying state constraints. To keep away from the state limit boundary as far as possible, the over control should be small—the tradeoff of this control scheme is the slow tracking speed. On the other hand, to guarantee the condition
as in the proof of Theorem 2, the control parameters should be chosen appropriately small. Although the proposed control method tracks the desired signal a little slower, the controller can guarantee the time-varying state constraints satisfied theoretically instead of adjusting parameters repeatedly.
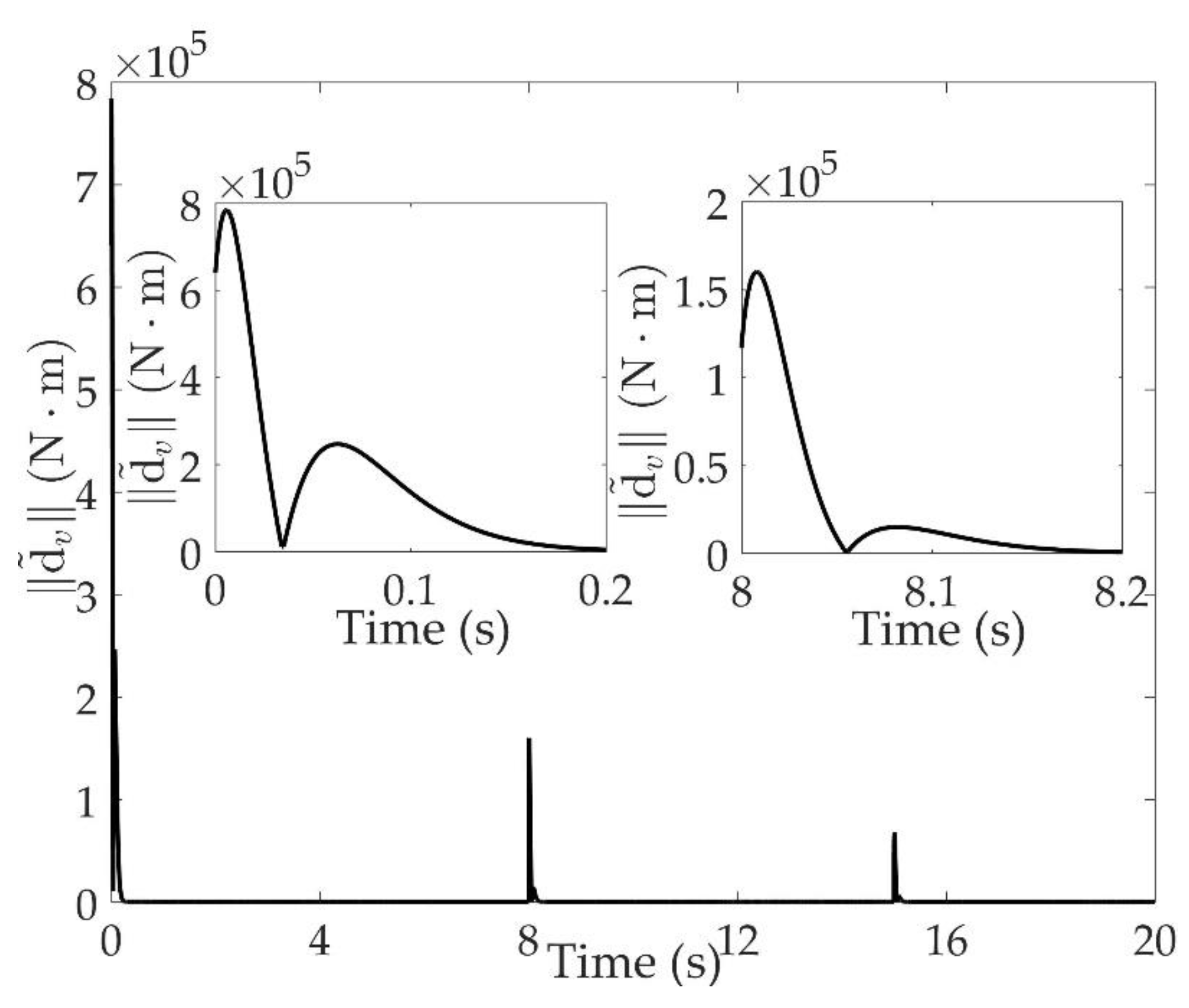
The good tracking performance is on the basis of effective estimation of total disturbance. As shown in
Figure 11 and
Figure 12, the norm of estimation error
is within 0.01 deg/s when
, and within 0.01 deg/s two seconds after the system switching at 8 s and 15 s. The norm of estimation error
is within
when
, and not exceeding
one second after the switchings occur. Although the total disturbance is composed of modeling uncertainties and external disturbances, it can be seen that the proposed extended state observe can estimate the total disturbance accurately.
To implement the proposed controller, a gyroscope should be set on the VSNSV in order to obtain the attitude angle and angular rate information. The control input we designed in this study is the control torque vector which is generated by control surfaces including the left elevon, right elevon and rudder. The sensor and actuators necessary for the controller are common on variable-structure near-space vehicles [
47]. Therefore, the proposed controller is easy to implement and applicable to most of the variable-structure near-space vehicles.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











