Novel Giant Magnetoimpedance Magnetic Field Sensor



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
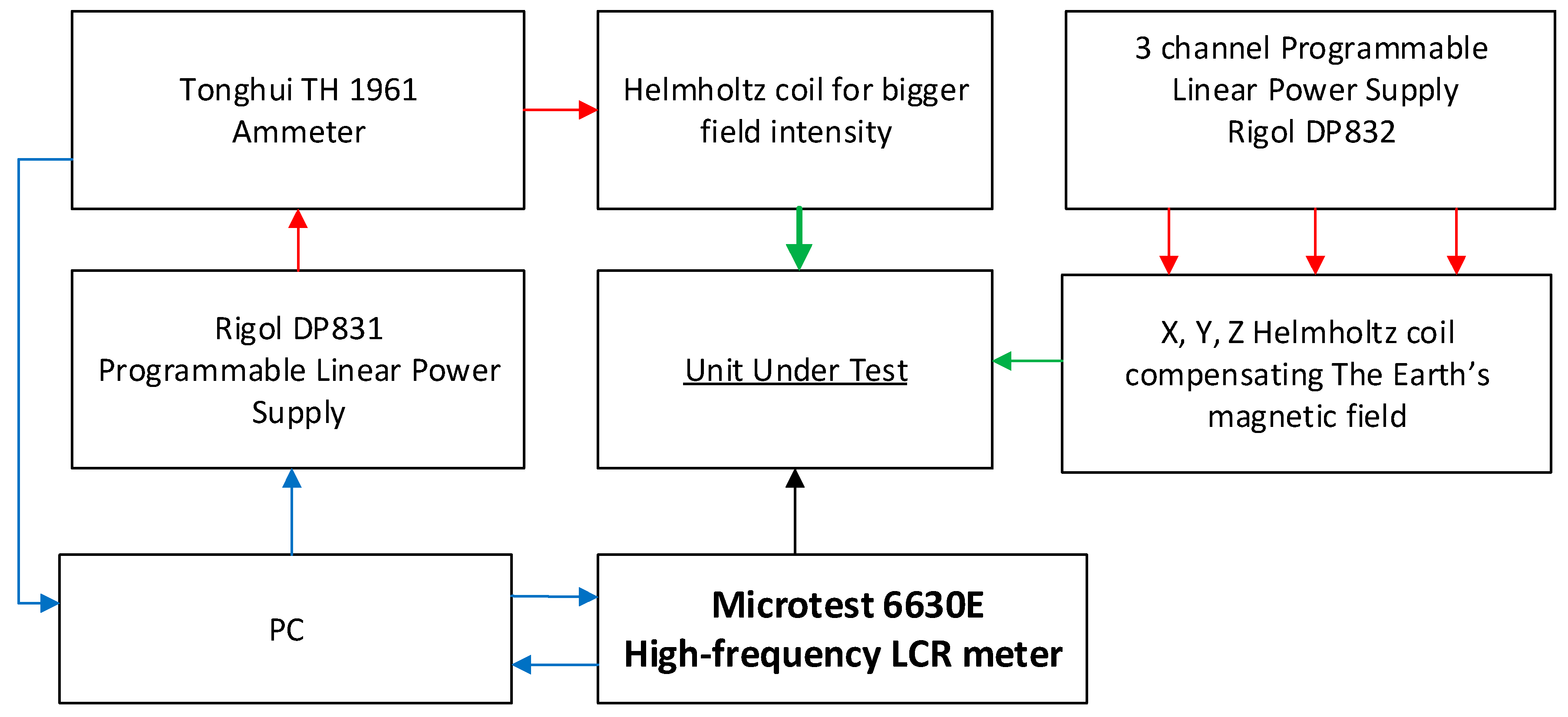
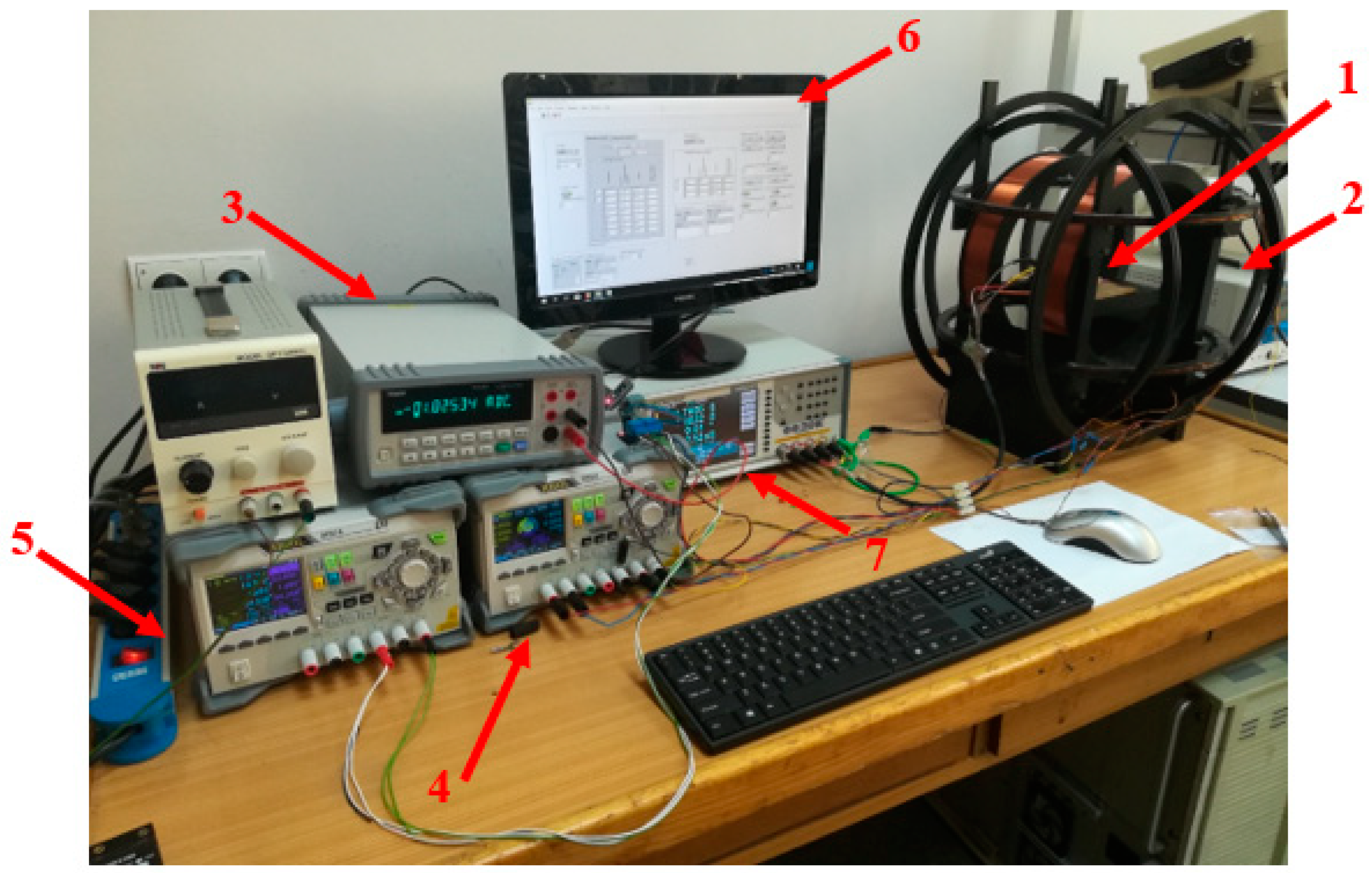
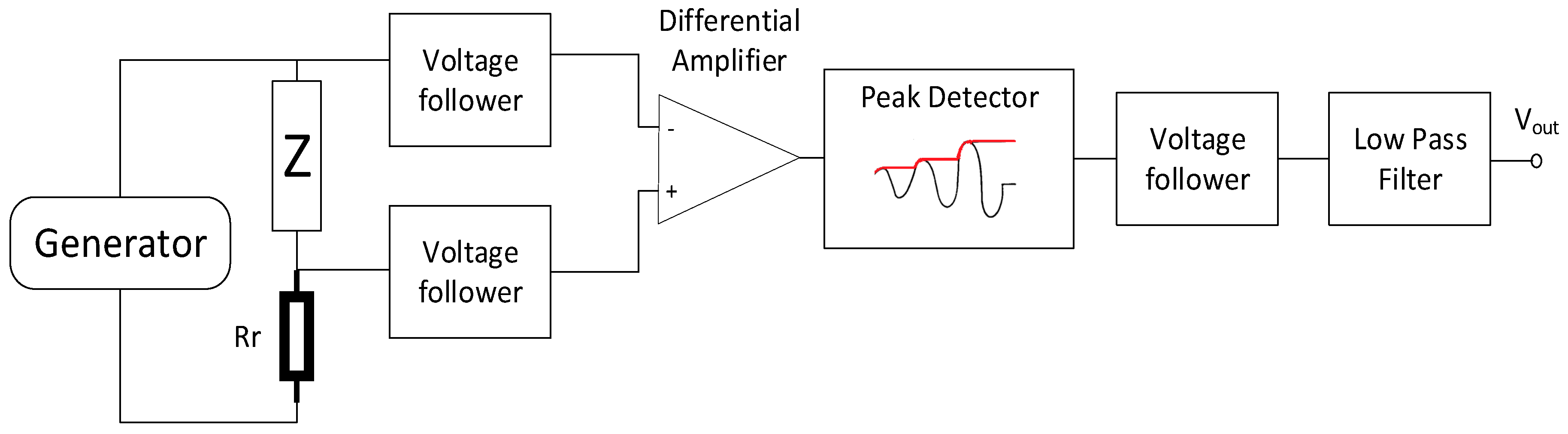
2.1. Test Stand for Measuring the Giant Magnetoimpedance Phenomenon
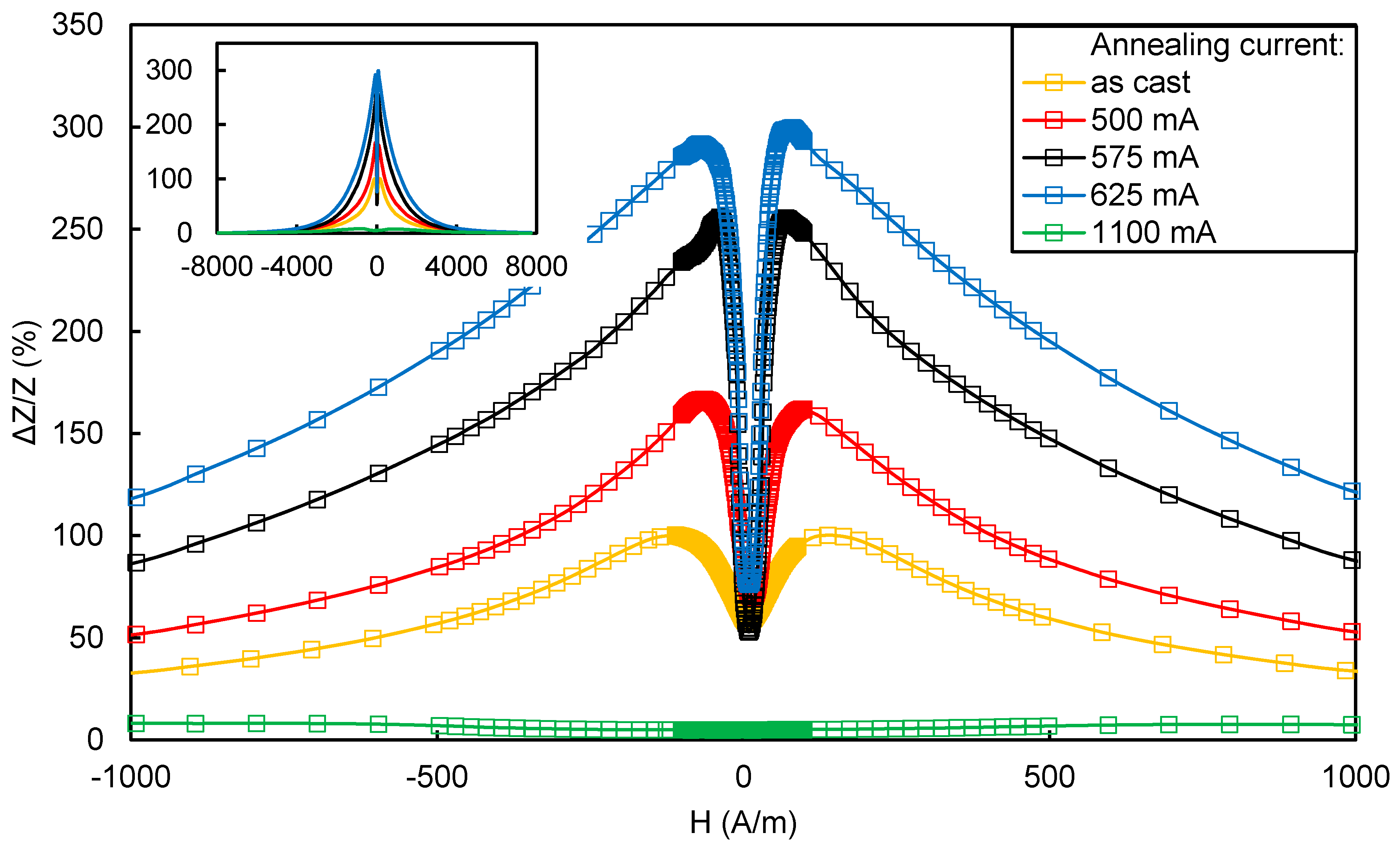
2.2. Preparation and Investigation of the Sensor Core
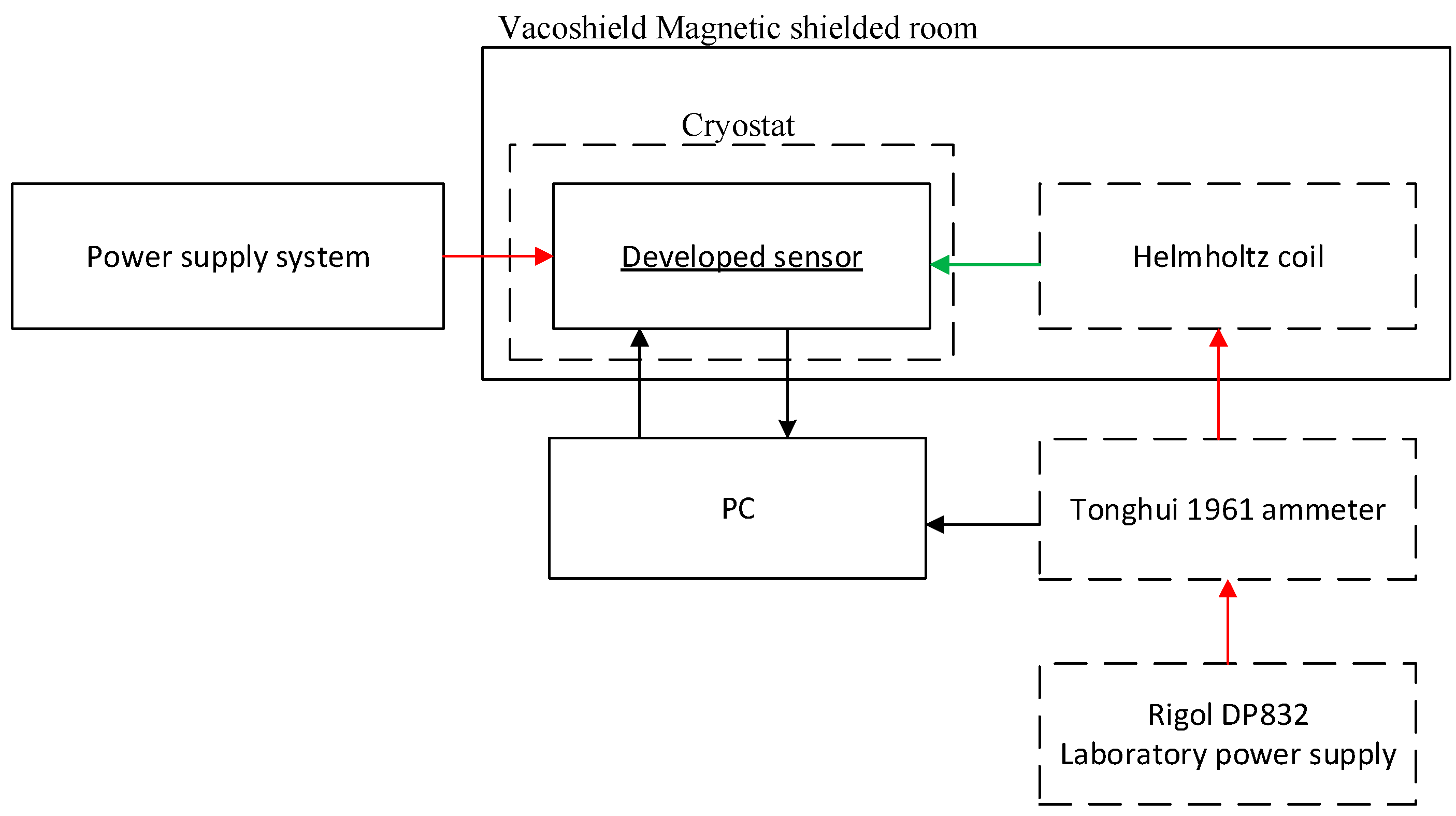
2.3. Proposed Magnetic Field Sensor Test Stand
3. Developed Sensor for Measuring Magnetic Fields Using the Magneto–Impedance Phenomenon
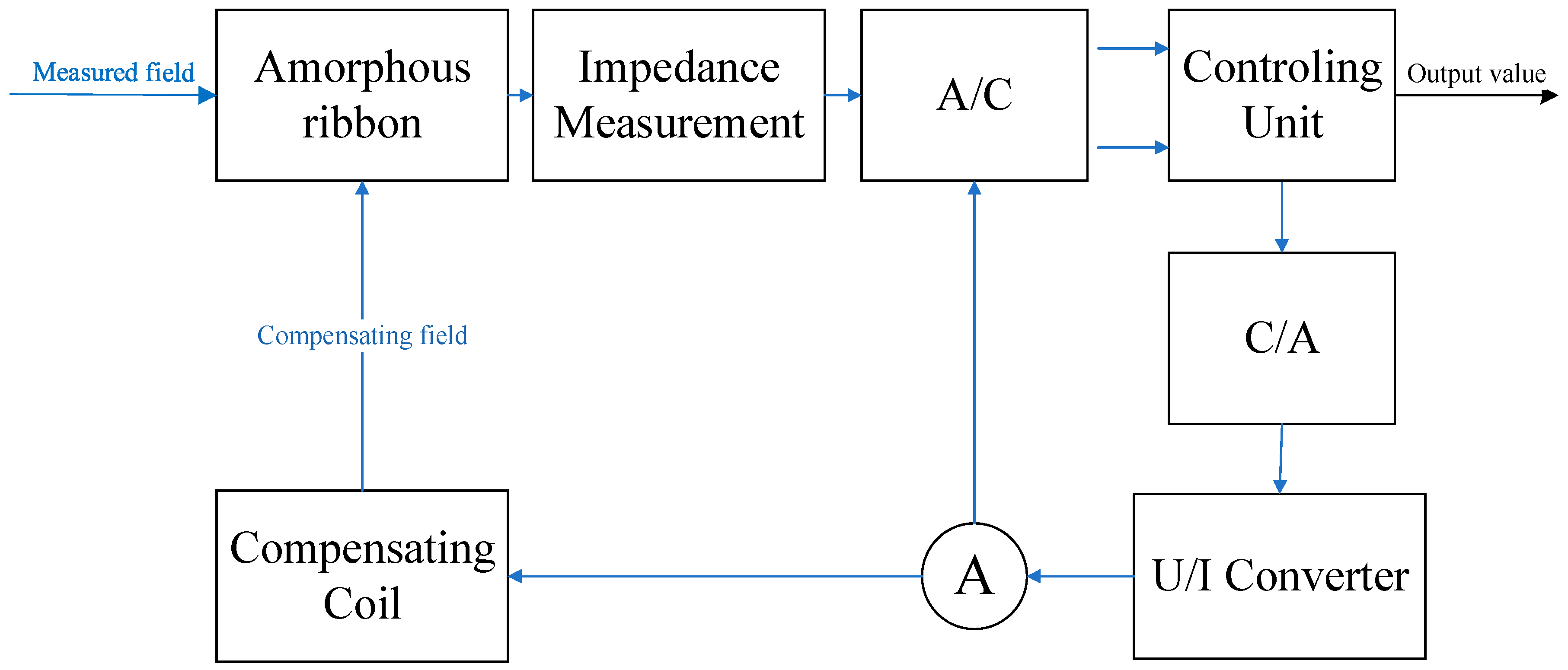
3.1. The Concept of the Proposed Sensor
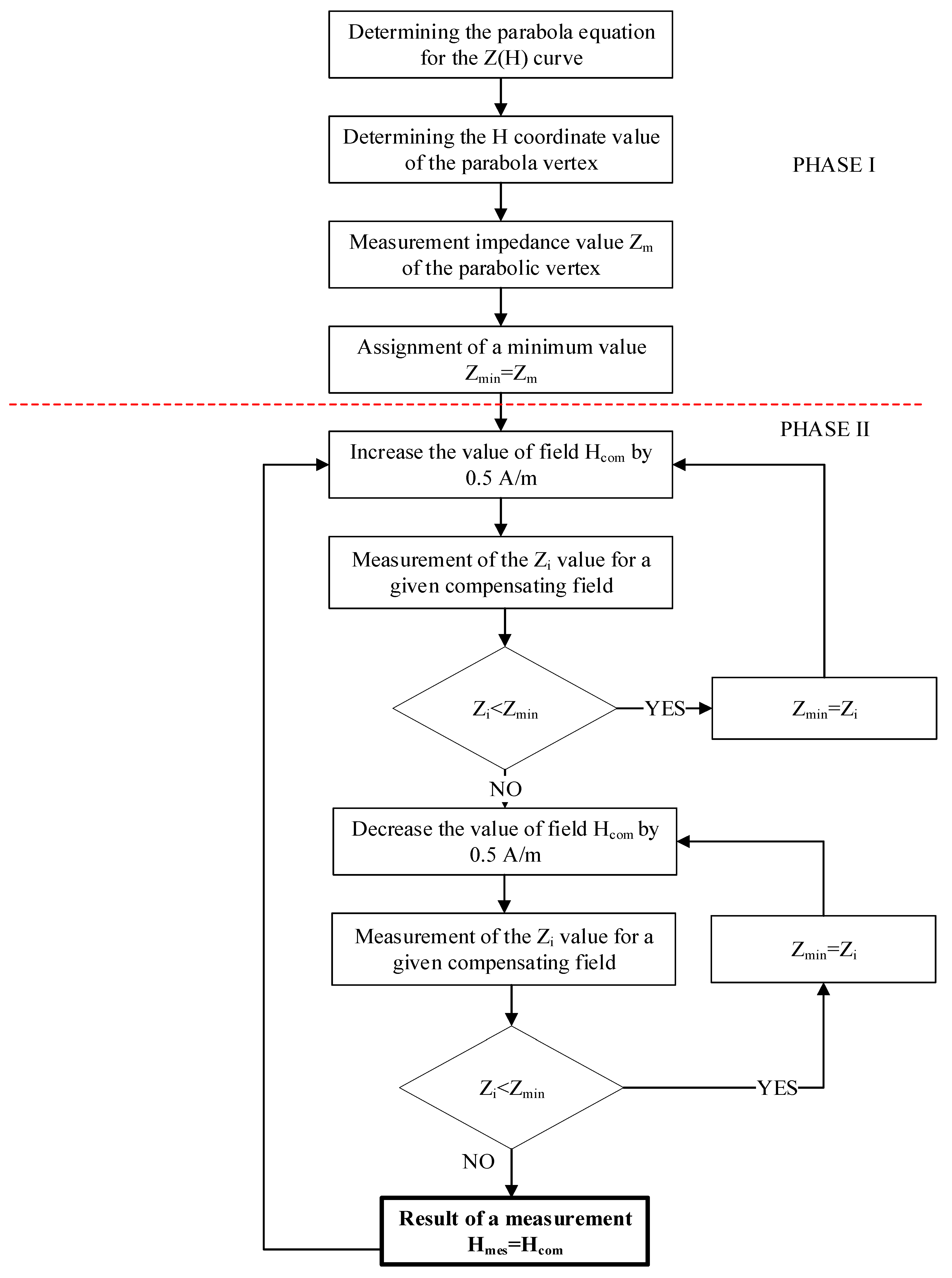
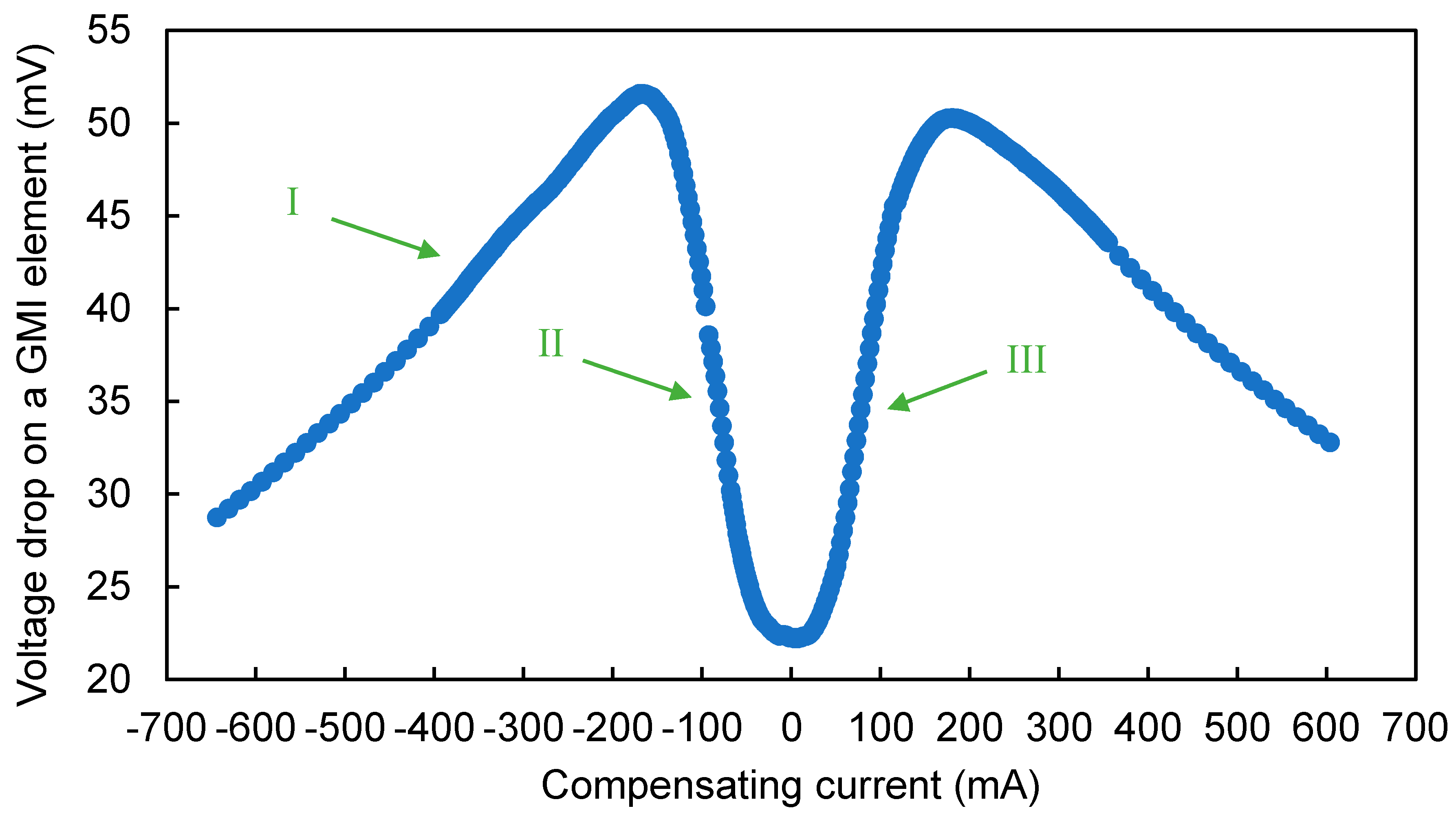
- First stage—the measurement of the Z characteristic points (Hcom),
- Second stage—feedback loop to find the minimum impedance.
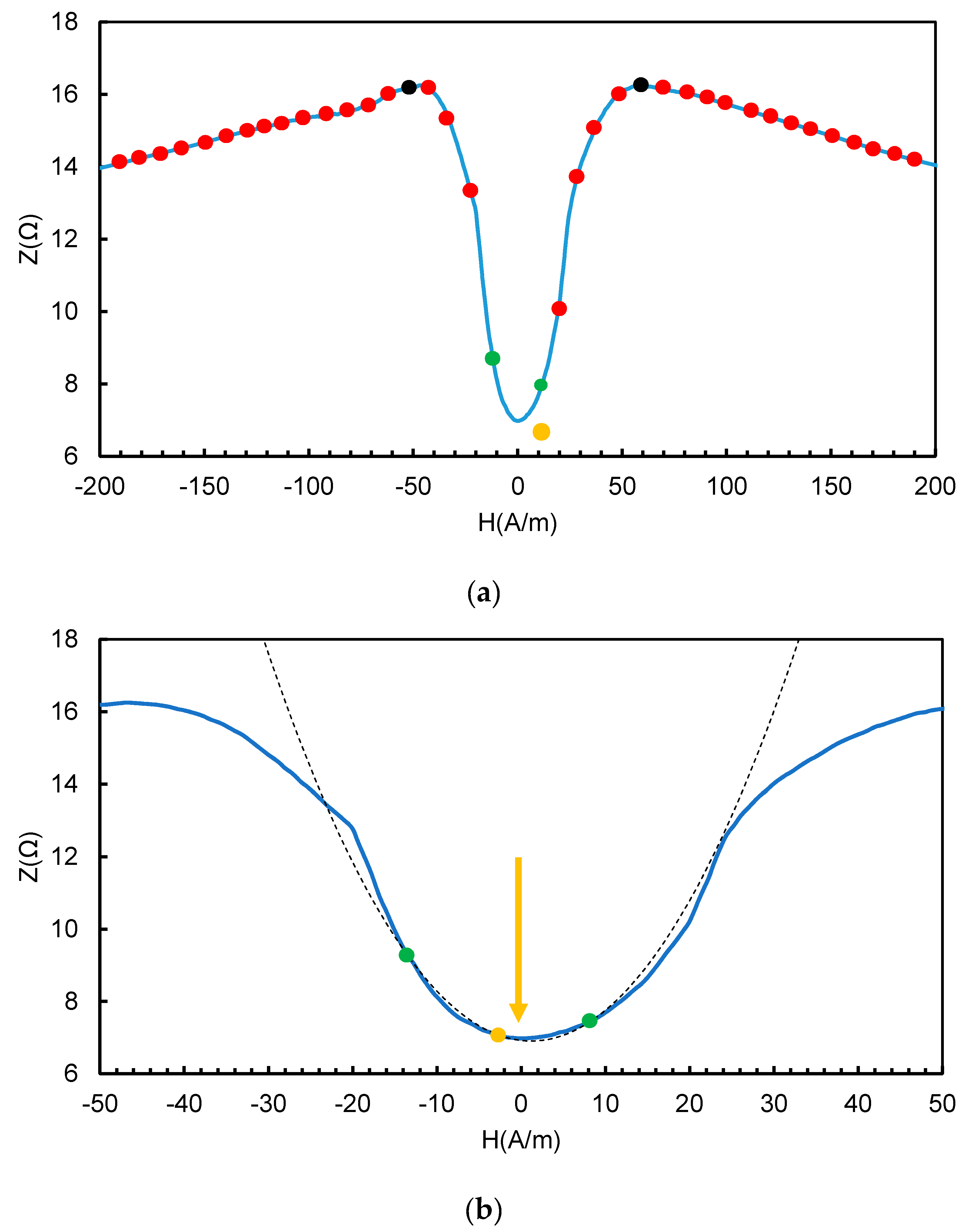
- ▪
- The value of the compensating field for the minimum measured value and the corresponding impedance value (point marked in orange); and
- ▪
- two points adjacent to this place (points marked in green).
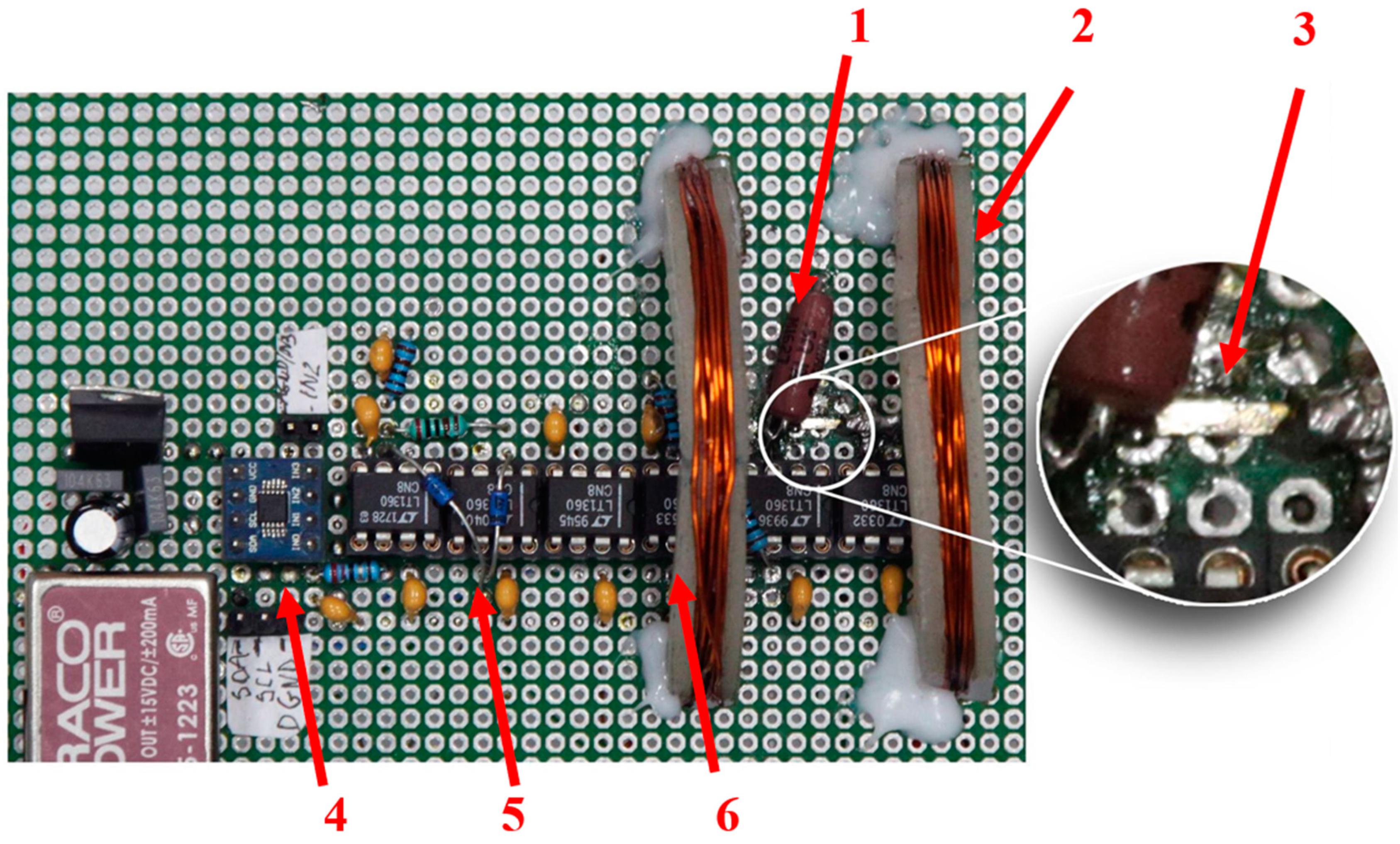
3.2. The Prototype of the Sensor
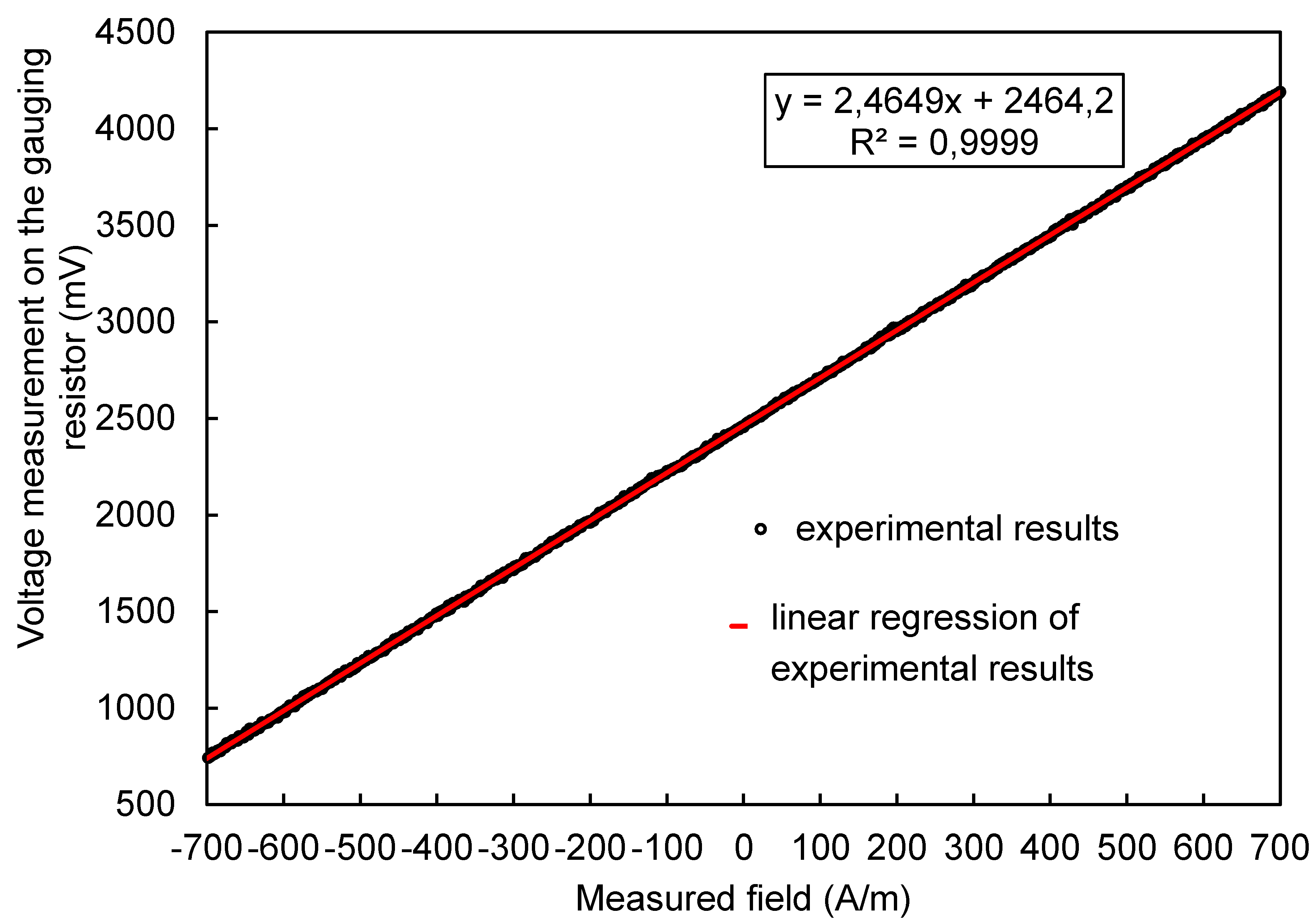
3.3. Performance of the Proposed Sensor
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Can, H.; Topal, U. Design of Ring Core Fluxgate Magnetometer as Attitude Control Sensor for Low and High Orbit Satellites. J. Supercond. Nov. Magn. 2015, 28, 1093–1096. [Google Scholar] [CrossRef]
- Nowicki, M.; Szewczyk, R. Ferromagnetic Objects Magnetovision Detection System. Materials 2013, 6, 5593–5601. [Google Scholar] [CrossRef] [PubMed]
- Nowicki, M.; Szewczyk, R. Determination of the Location and Magnetic Moment of Ferromagnetic Objects Based on the Analysis of Magnetovision Measurements. Sensors 2019, 19, 337. [Google Scholar] [CrossRef] [PubMed]
- Maqableh, M.M.; Huang, X.; Sung, S.-Y.; Reddy, K.S.M.; Norby, G.; Victora, R.H.; Stadler, B.J.H. Low-Resistivity 10 nm Diameter Magnetic Sensors. Nano Lett. 2012, 12, 4102–4109. [Google Scholar] [CrossRef] [PubMed]
- Izgi, T.; Goktepe, M.; Bayri, N.; Kolat, V.S.; Atalay, S. Crack Detection Using Fluxgate Magnetic Field Sensor. Acta Phys. Pol. A 2014, 125, 211–213. [Google Scholar] [CrossRef]
- Peters, T.J. Automobile navigation using a magnetic flux-gate compass. IEEE Trans. Veh. Technol. 1986, 35, 41–47. [Google Scholar] [CrossRef]
- Sammarco, J.J. Mining machine orientation control based on inertial, gravitational, and magnetic sensors. IEEE Trans. Ind. Appl. 1992, 28, 1126–1130. [Google Scholar] [CrossRef]
- Vetoshko, P.M.; Gusev, N.A.; Chepurnova, D.A.; Samoilova, E.V.; Syvorotka, I.I.; Syvorotka, I.M.; Zvezdin, A.K.; Korotaeva, A.A.; Belotelov, V.I. Flux-gate magnetic field sensor based on yttrium iron garnet films for magnetocardiography investigations. Tech. Phys. Lett. 2016, 42, 860–864. [Google Scholar] [CrossRef]
- Salach, J.; Hasse, L.; Szewczyk, R.; Smulko, J.; Bienkowski, A.; Frydrych, P.; Kolano-Burian, A. Low Current Transformer Utilizing Co-Based Amorphous Alloys. IEEE Trans. Magn. 2012, 48, 1493–1496. [Google Scholar] [CrossRef]
- Mohri, K.; Uchiyama, T.; Shen, L.; Cai, C.; Panina, L. Amorphous wire and CMOS IC-based sensitive micro-magnetic sensors (MI sensor and SI sensor) for intelligent measurements and controls. J. Magn. Magn. Mater. 2002, 249, 351–356. [Google Scholar] [CrossRef]
- Dixon, R.; Sensors, P.A. Magnetic Sensors Report-2017. Available online: https://cdn.ihs.com/www/pdf/1118/ABSTRACT-Magnetic-SensorsReport-2017.pdf (accessed on 10 September 2019).
- González-Legarreta, L.; Talaat, A.; Ipatov, M.; Zhukova, V.; Zhukov, A.; González, J.; Hernando, B. Magnetotransport at High Frequency of Soft Magnetic Amorphous Ribbons. In Smart Sensors, Measurement and Instrumentation; Springer: Berlin, Germany, 2015; pp. 235–251. [Google Scholar]
- Zhukov, A.; Zhukova, V.; Blanco, J.M.; Gonzalez, J. Recent research on magnetic properties of glass-coated microwires. J. Magn. Magn. Mater. 2005, 294, 182–192. [Google Scholar] [CrossRef]
- Panina, L.V.; Mohri, K.; Uchiyama, T. Giant magneto-impedance (GMI) in amorphous wire, single layer film and sandwich film. Phys. A Stat. Mech. Appl. 1997, 241, 429–438. [Google Scholar] [CrossRef]
- Nishibe, Y.; Yamadera, H.; Ohta, N.; Tsukada, K.; Nonomura, Y. Thin film magnetic field sensor utilizing Magneto Impedance effect. Sens. Actuators A Phys. 2000, 82, 155–160. [Google Scholar] [CrossRef]
- Ripka, P.; Platil, A.; Kaspar, P.; Tipek, A.; Malatek, M.; Kraus, L. Permalloy GMI sensor. J. Magn. Magn. Mater. 2003, 254–255, 633–635. [Google Scholar] [CrossRef]
- Mohri, K.; Uchiyama, T.; Panina, L.V. Recent advances of micro magnetic sensors and sensing application. Sens. Actuators A Phys. 1997, 59, 1–8. [Google Scholar] [CrossRef]
- Yu, G.; Bu, X.; Yang, B.; Li, Y.; Xiang, C. Differential-Type GMI Magnetic Sensor Based on Longitudinal Excitation. IEEE Sens. J. 2011, 11, 2273–2278. [Google Scholar]
- Beach, R.S.; Berkowitz, A.E. Giant magnetic field dependent impedance of amorphous FeCoSiB wire. Appl. Phys. Lett. 1994, 64, 3652–3654. [Google Scholar] [CrossRef]
- Panina, L.V.; Mohri, K. Magneto-impedance effect in amorphous wires. Appl. Phys. Lett. 1994, 65, 1189–1191. [Google Scholar] [CrossRef]
- Bautin, V.A.; Kholodkov, N.S.; Popova, A.V.; Gudoshnikov, S.A.; Usov, N.A. Co-rich Amorphous Microwires with Improved Giant Magnetoimpedance Characteristics Due to Glass Coating Etching. Jom 2019, 71, 3113–3118. [Google Scholar] [CrossRef]
- Corte-León, P.; Zhukova, V.; Ipatov, M.; Blanco, J.M.; Gonzalez, J.; Zhukov, A. Engineering of magnetic properties of Co-rich microwires by joule heating. Intermetallics 2019, 105, 92–98. [Google Scholar] [CrossRef]
- Wang, T.; He, Y.; Chen, Y.; Huang, D.; Yang, J.; Rao, J.; Li, H.; Wang, B.; Wang, B.; Liu, M. Preparation of a SiO2-covered amorphous CoFeSiB microwire and study on the current amplitude effect on the transverse giant magnetoimpedance. Micro Nano Lett. 2019, 14, 436–439. [Google Scholar] [CrossRef]
- Liu, J.; Qin, F.; Chen, D.; Shen, H.; Wang, H.; Xing, D.; Phan, M.H.; Sun, J. Combined current-modulation annealing induced enhancement of giant magnetoimpedance effect of Co-rich amorphous microwires. J. Appl. Phys. 2014, 115, 1–4. [Google Scholar] [CrossRef]
- Dzhumazoda, A.; Panina, L.V.; Nematov, M.G.; Ukhasov, A.A.; Yudanov, N.A.; Morchenko, A.T.; Qin, F.X. Temperature-stable magnetoimpedance (MI) of current-annealed Co-based amorphous microwires. J. Magn. Magn. Mater. 2019, 474, 374–380. [Google Scholar] [CrossRef]
- Yang, Z.; Chlenova, A.A.; Golubeva, E.V.; Volchkov, S.O.; Guo, P.; Shcherbinin, S.V.; Kurlyandskaya, G.V. Magnetoimpedance Effect in the Ribbon-Based Patterned Soft Ferromagnetic Meander-Shaped Elements for Sensor Application. Sensors 2019, 19, 2468. [Google Scholar] [CrossRef] [PubMed]
- Feng, Z.; Zhi, S.; Guo, L.; Lei, C.; Zhou, Y. Investigation of magnetic field anneal in micro-patterned amorphous ribbon on giant magneto-impedance effect enhancement. Sens. Rev. 2019, 39, 309–317. [Google Scholar] [CrossRef]
- Mardani, R. Fabrication of FM/NM/FM Hetero-Structure Multilayers and Investigation on Structural and Magnetic Properties: Application in GMI Magnetic Sensors. J. Supercond. Nov. Magn. 2019. [Google Scholar] [CrossRef]
- Honkura, Y. Development of amorphous wire type MI sensors for automobile use. J. Magn. Magn. Mater. 2002, 249, 375–381. [Google Scholar] [CrossRef]
- Chang, H.; Yang, M.; Liu, J.; Yu, Y. Highly Sensitive GMI Sensor with an Equivalent Noise 0.3 nT. In Proceedings of the 2012 Spring Congress on Engineering and Technology, Xi’an, China, 27–30 May 2012; pp. 1–4. [Google Scholar]
- Nowicki, M. A Modified Impedance-Frequency Converter for Inexpensive Inductive and Resistive Sensor Applications. Sensors 2019, 19, 121. [Google Scholar] [CrossRef]
- Kurlyandskaya, G.V.; Fernández, E.; Safronov, A.P.; Svalov, A.V.; Beketov, I.; Beitia, A.B.; García-Arribas, A.; Blyakhman, F.A. Giant magnetoimpedance biosensor for ferrogel detection: Model system to evaluate properties of natural tissue. Appl. Phys. Lett. 2015, 106, 1–6. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhang, Q.; Li, X.; Pan, H.; Wang, J.; Zhao, Z. Detection of AFP with an ultra-sensitive giant magnetoimpedance biosensor. Sens. Actuators B Chem. 2019, 293, 53–58. [Google Scholar] [CrossRef]
- Wang, Y.; Wen, Y.; Li, P.; Chen, L. Multilevel nonvolatile memory based on the hysteretic giant magnetoimpedance effect of heterogeneous magnetic laminate. Appl. Phys. Express 2019, 12, 104006. [Google Scholar] [CrossRef]
- Wang, T.; Wang, B.; Luo, Y.; Li, H.; Rao, J.; Wu, Z.; Liu, M. Accurate Measurements of the Rotational Velocities of Brushless Direct-Current Motors by Using an Ultrasensitive Magnetoimpedance Sensing System. Micromachines 2019, 10, 859. [Google Scholar] [CrossRef] [PubMed]
- Nabias, J.; Asfour, A.; Yonnet, J.P. Effect of the temperature on the off-diagonal Giant Magneto-Impedance (GMI) sensors. Int. J. Appl. Electromagn. Mech. 2019, 59, 465–472. [Google Scholar] [CrossRef]
- Feng, Z.; Zhi, S.; Wei, M.; Zhou, Y.; Liu, C.; Lei, C. An integrated three-dimensional micro-solenoid giant magnetoimpedance sensing system based on MEMS technology. Sens. Actuators A Phys. 2019, 299, 111640. [Google Scholar] [CrossRef]
- Nowicki, M.; Gazda, P.; Szewczyk, R.; Marusenkov, A.; Nosenko, A.; Kyrylchuk, V. Strain Dependence of Hysteretic Giant Magnetoimpedance Effect in Co-Based Amorphous Ribbon. Materials 2019, 12, 2110. [Google Scholar] [CrossRef]
- Gazda, P.; Nowicki, M.; Szewczyk, R. Comparison of stress-impedance effect in amorphous ribbons with positive and negative magnetostriction. Materials 2019, 12, 275. [Google Scholar] [CrossRef]
- Nowicki, M. Stress Dependence of the Small Angle Magnetization Rotation Signal in Commercial Amorphous Ribbons. Materials 2019, 12, 2908. [Google Scholar] [CrossRef]
- Nowicki, M. Stress Dependence of Seebeck Coefficient in Iron-Based Amorphous Ribbons. Materials 2019, 12, 2814. [Google Scholar] [CrossRef]
- Nowicki, M.; Szewczyk, R.; Nowak, P. Experimental Verification of Isotropic and Anisotropic Anhysteretic Magnetization Models. Materials (Basel) 2019, 12, 1549. [Google Scholar] [CrossRef]
- Nowicki, M.; Szewczyk, R.; Charubin, T.; Marusenkov, A.; Nosenko, A.; Kyrylchuk, V. Modeling the Hysteresis Loop of Ultra-High Permeability Amorphous Alloy for Space Applications. Materials 2018, 11, 2079. [Google Scholar] [CrossRef]
- Nowicki, M. Tensductor—Amorphous Alloy Based Magnetoelastic Tensile Force Sensor. Sensors 2018, 18, 4420. [Google Scholar] [CrossRef] [PubMed]
- Charubin, T.; Nowicki, M.; Szewczyk, R. Influence of Torsion on Matteucci Effect Signal Parameters in Co-Based Bistable Amorphous Wire. Materials 2019, 12, 532. [Google Scholar] [CrossRef] [PubMed]
- Sasada, I.; Shiokawa, M. Noise characteristics of Co-based amorphous tapes-to seek low-noise magnetic shell for magnetic shaking. In Proceedings of the 2003 IEEE International Magnetics Conference (INTERMAG), Boston, MA, USA, 30 March–3 April 2003; pp. 3435–3437. [Google Scholar]
- Sasada, I. Low-noise fundamental-mode orthogonal fluxgate magnetometer built with an amorphous ribbon core. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Lu, C.C.; Huang, J.; Chiu, P.K.; Chiu, S.L.; Jeng, J.T. High-sensitivity low-noise miniature fluxgate magnetometers using a flip chip conceptual design. Sensors 2014, 14, 13815–13829. [Google Scholar] [CrossRef] [PubMed]
- Yoon, S.-H.; Lee, S.-W.; Lee, Y.-H.; Oh, J.-S. A Miniaturized Magnetic Induction Sensor Using Geomagnetism for Turn Count of Small-Caliber Ammunition. Sensors 2006, 6, 712–726. [Google Scholar] [CrossRef]
- Zhi, S.; Lei, C.; Yang, Z.; Feng, Z.; Guo, L.; Zhou, Y. Effect of Field Annealing Induced Magnetic Anisotropy on the Performance of Meander-Core Orthogonal Fluxgate Sensor. Phys. Status Solidi Appl. Mater. Sci. 2018, 215, 1–6. [Google Scholar] [CrossRef]
- Kincaid, D.; Cheney, E.W. Numerical Analysis: Mathematics of Scientific Computing; American Mathematical Society: Providence, RI, USA, 2002; pp. 81–93. [Google Scholar]
- Cardarelli, F. Materials Handbook; Springer: London, UK, 2008; p. 210. [Google Scholar]
- 2714A Spec Sheet; Metglas Inc.: Conway, SC, USA, 2011.
- Harrison, L.T. Creating current sources with op amps. In Current Sources and Voltage References: A Design Reference for Electronics Engineers; Elsevier: Oxford, UK, 2005; pp. 296–311. [Google Scholar]
- Manual, M. Model 410 Gaussmeter. Available online: https://www.lakeshore.com/products/categories/overview/magnetic-products/gaussmeters-teslameters/model-410-hand-held-gaussmeter (accessed on 3 December 2019).
- Nowicki, M.; Kachniarz, M.; Szewczyk, R. Temperature error of Hall-effect and magnetoresistive commercial magnetometers. Arch. Electr. Eng. 2017, 66, 625–630. [Google Scholar] [CrossRef][Green Version]











© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gazda, P.; Szewczyk, R. Novel Giant Magnetoimpedance Magnetic Field Sensor. Sensors 2020, 20, 691. https://doi.org/10.3390/s20030691
Gazda P, Szewczyk R. Novel Giant Magnetoimpedance Magnetic Field Sensor. Sensors. 2020; 20(3):691. https://doi.org/10.3390/s20030691
Chicago/Turabian StyleGazda, Piotr, and Roman Szewczyk. 2020. "Novel Giant Magnetoimpedance Magnetic Field Sensor" Sensors 20, no. 3: 691. https://doi.org/10.3390/s20030691
APA StyleGazda, P., & Szewczyk, R. (2020). Novel Giant Magnetoimpedance Magnetic Field Sensor. Sensors, 20(3), 691. https://doi.org/10.3390/s20030691