In Situ Wireless Channel Visualization Using Augmented Reality and Ray Tracing


Abstract
1. Introduction
- We developed and investigated the performance of three spatial mapping algorithms that converts image files or 3D objects to indoor vector maps, called the facet model. The facet model is required for the ray tracing algorithm to perform signal strength predictions. The first solution called the image to facet algorithm does not require the use of expensive AR devices, and results can be obtained by using the camera of a typical smartphone device. The algorithm converts the .jpeg images of the walls of a room to a vector facet model. The importance of this solution is that it is low-cost and can allow any smartphone device to host the proposed application. The second algorithm is called min-max spatial mapping and converts an object file of vertices derived by an AR device to the indoor facet map. This algorithm requires the use of a depth camera, which is usually part of expensive AR devices. Furthermore, the spatial understanding algorithm uses an existing Software Development Kit (SDK) to extract the walls of the room and create the facet model.
- In addition, we developed a channel prediction ray tracing algorithm, based on the ray launching technique, and integrated it into the AR engine to create an output suitable for the holographic presentation. The channel prediction algorithm considers any combination of propagation mechanisms such as multiple reflections and transmission through walls as well as single diffractions from wall corners.
- We also evaluated the proposed solutions over a residential apartment and showed that the proposed 2D image-to-facet model provides accurate results and can be hosted on any smartphone device.
- Compared to existing applications that visualize field strength, the proposed solution goes multiple steps beyond because it does not require measurements since it estimates the radio signals making it suitable for radio planning. In addition, it considers the indoor environment in the field predictions, whereas other apps simply record the signal strength.
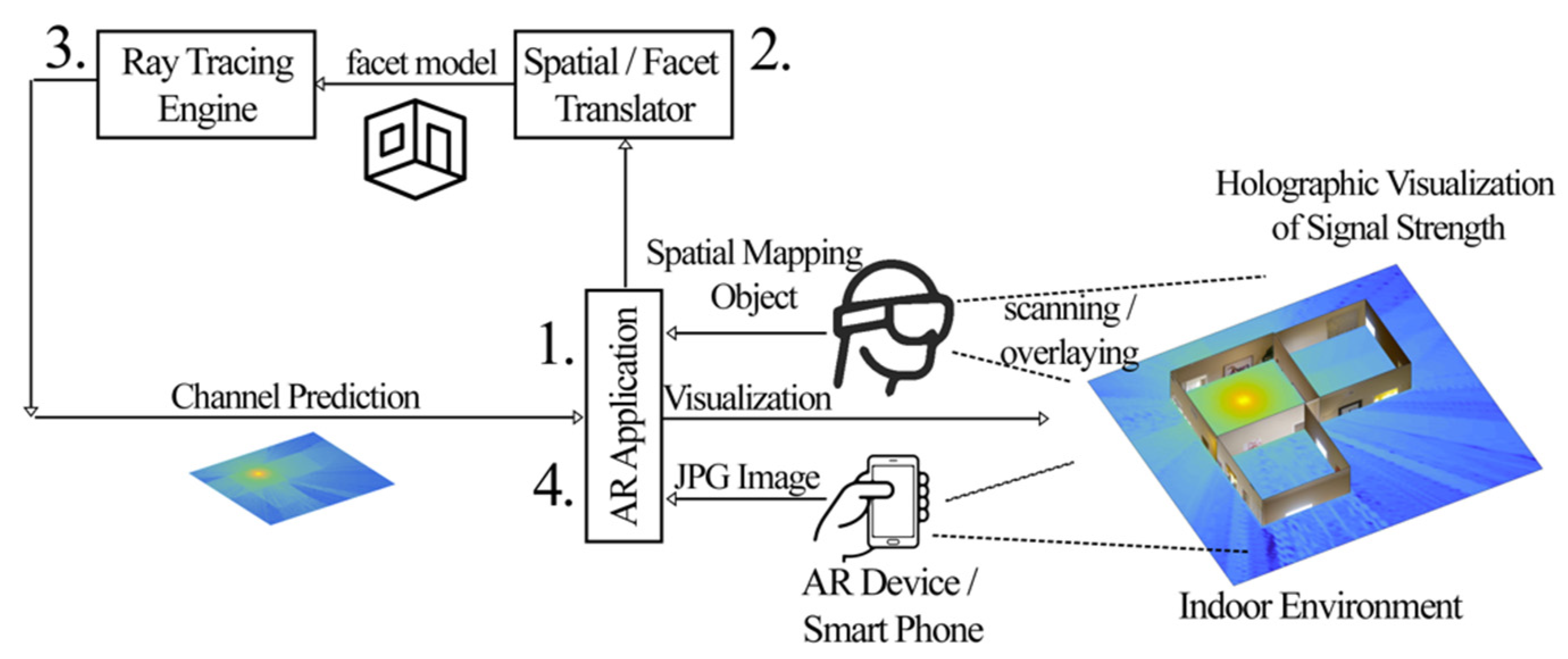
2. System Model of Augmented-Rays
3. Spatial Mapping and Facet Model Translation Engine
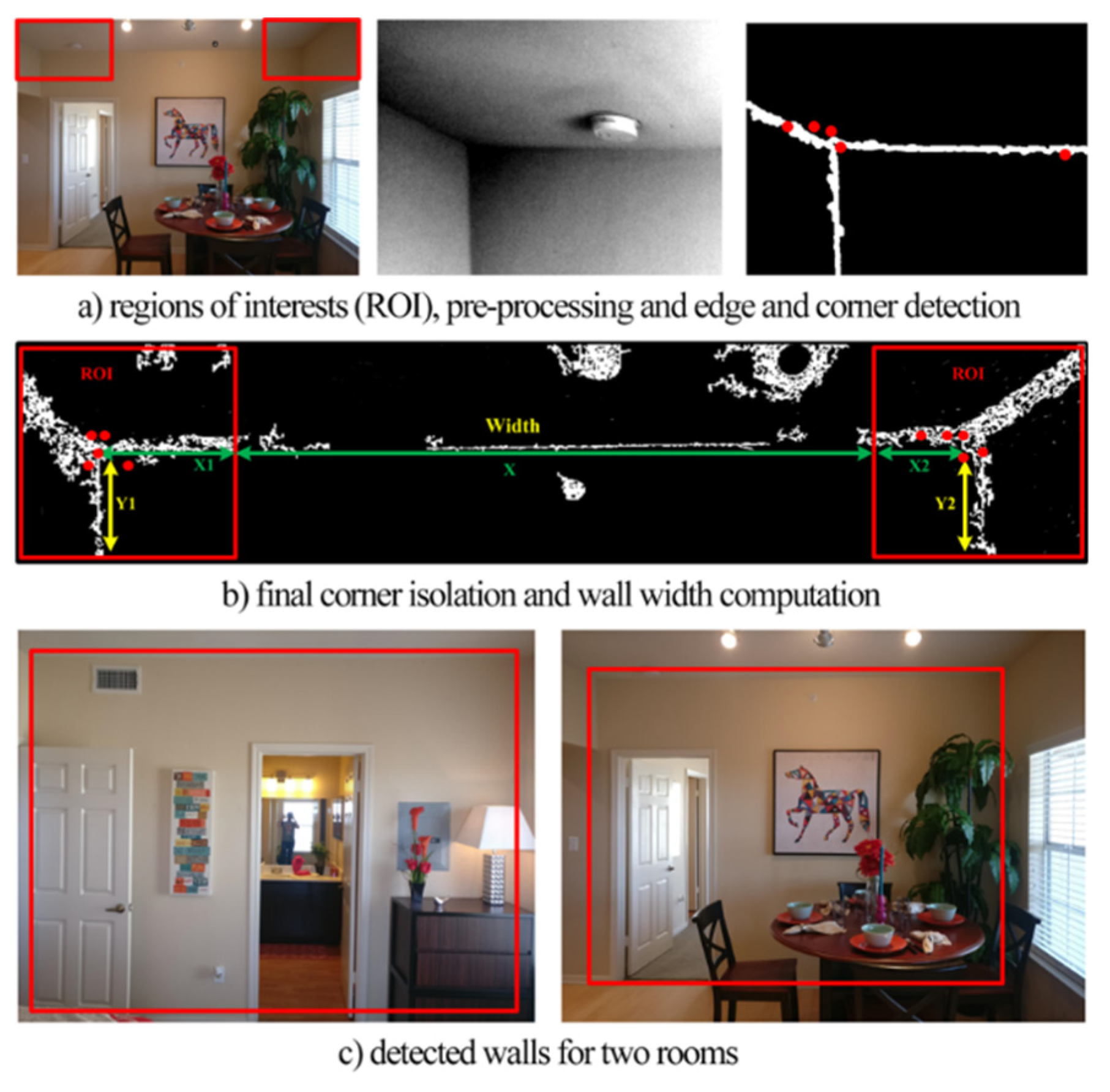
3.1. Image to Facet Model Algorithm
| Algorithm 1. Wall Detection |
| 1: procedure Detect_wall(image, wall_height) |
| 2: Find Edge pixels using Canny Edge Detector. |
| 3: Find (top, bottom, left, right)-most straight lines on the edge image using Hough Transform. |
| 4: Compute intersecting points of lines. Consider those as the four corners of the wall. |
| 5: Apply corner detection to detect corners in the image and find the best candidates for corner locations by comparing with line intersection points. |
| 6: Use user input of wall_height and detected wall corners to estimate the length of horizontal lines and overall wall dimensions. |
| 7: return wall dimensions |
| 8: end procedure |
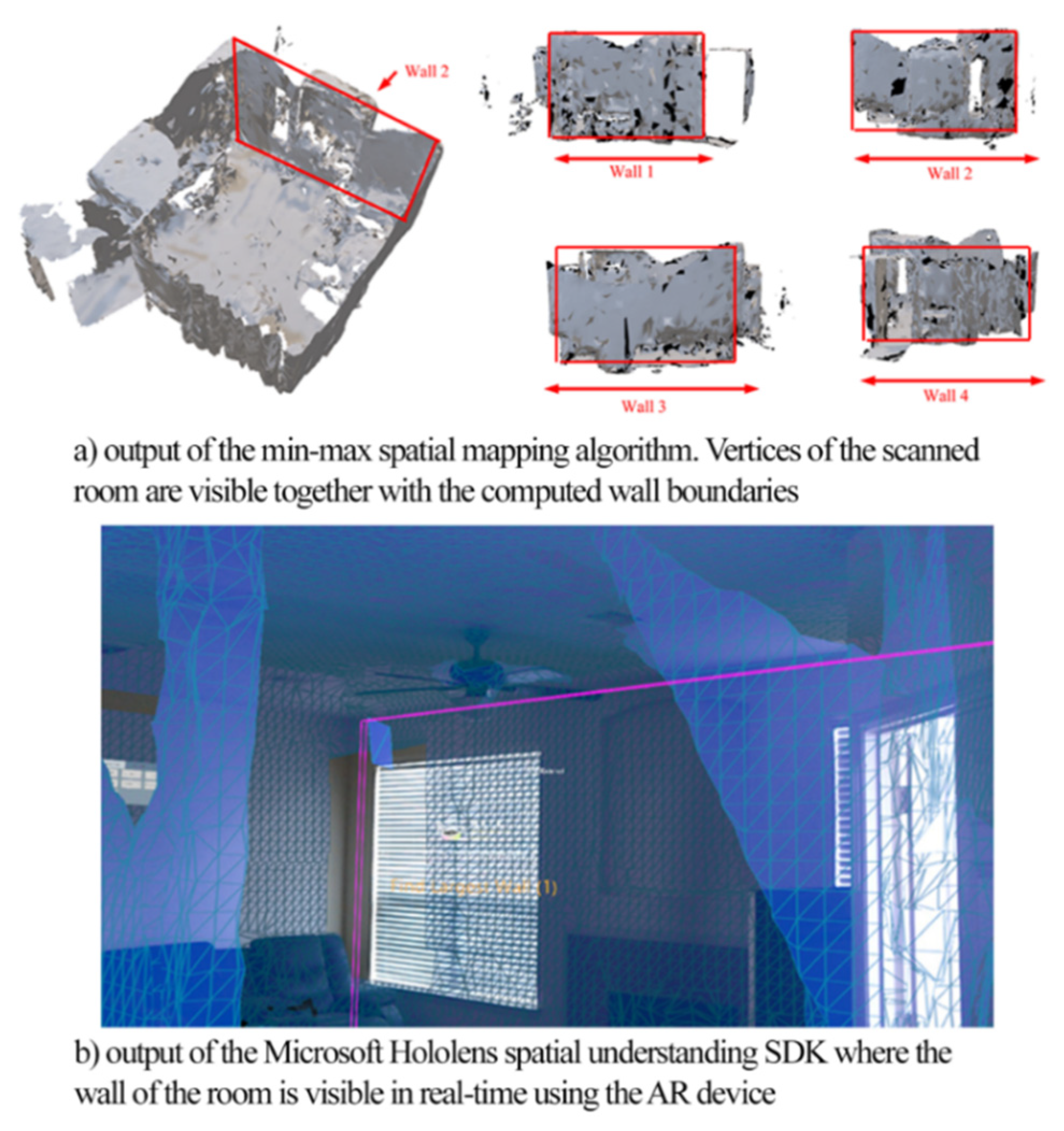
3.2. Min-Max Spatial Mapping
3.3. Hololens SDK Spatial Understanding
| Algorithm 2. Capturing Wall Dimensions from Hololens SDK |
| EXTERN_C__declspec(dllexport) |
| int QueryTopology_FindPositionsOnWalls( |
| _In_ float minHeightOfWallSpace, |
| _In_ float minWidthOfWallSpace, |
| _In_ float minHeightAboveFloor, |
| _In_ float minFacingClearance, |
| _In_ int locationCount, |
| _Inout_ Dll_Interface::TopologyResult* locationData) |
| --------------------------------------------------------------------------------- |
| struct TopologyResult |
| { |
| DirectX::XMFLOAT3 position; |
| DirectX::XMFLOAT3 normal; |
| float width; |
| float length; |
| }; |
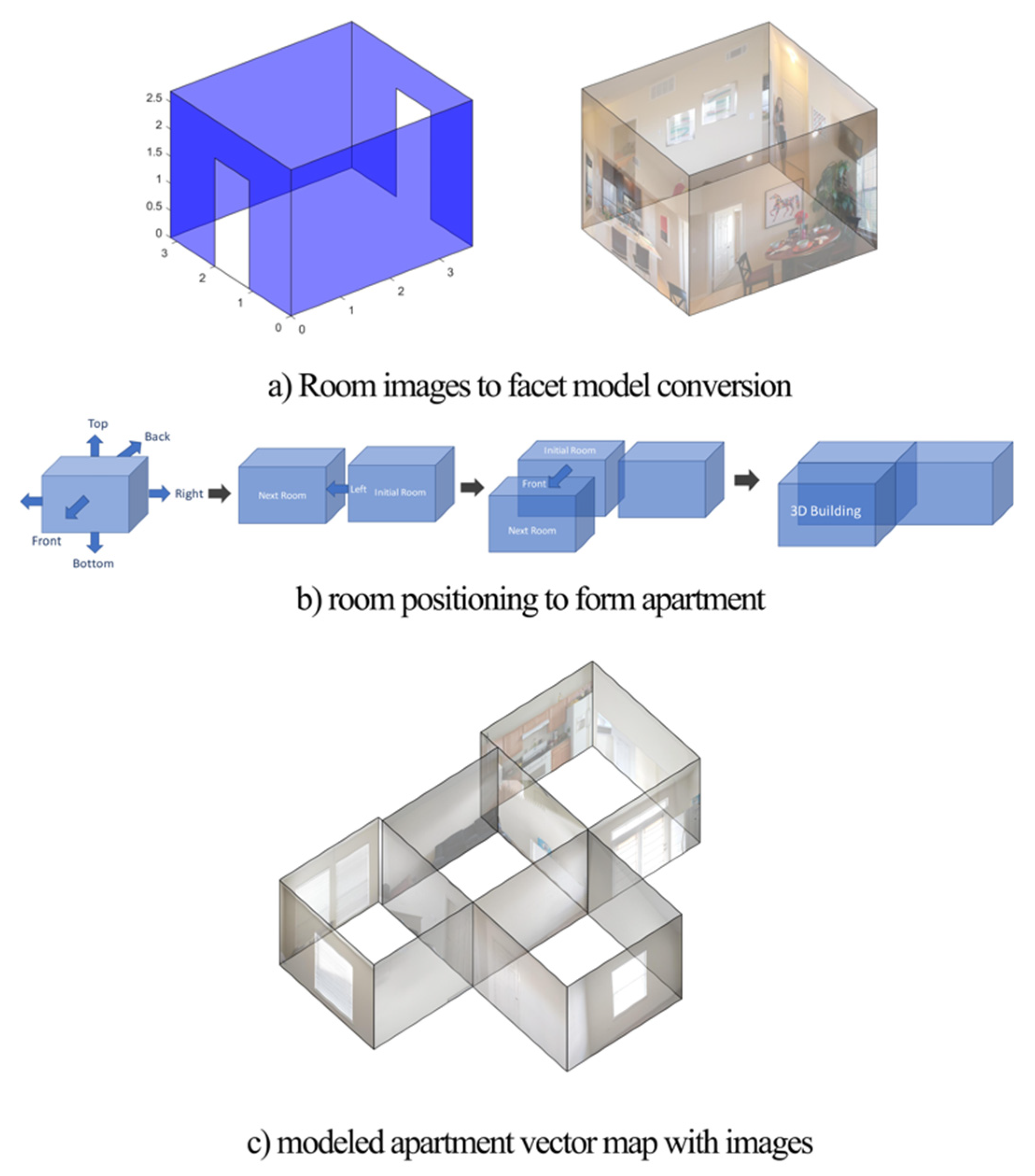
4. Constructing the Environment and Algorithm Limitations
- -
- it can be used only for simple residential apartments and cannot provide accurate results for large multi-story homes or commercial buildings due to the complexity of the clutter of the indoor environment,
- -
- does not consider furniture clutter that may be important for mm-Wave propagation,
- -
- the algorithm requires that images should be aligned and not rotated and taken in a clock-wise manner,
- -
- large corridors cannot be efficiently captured in the images.
5. The Ray Tracing Algorithm
6. Results and Comparison
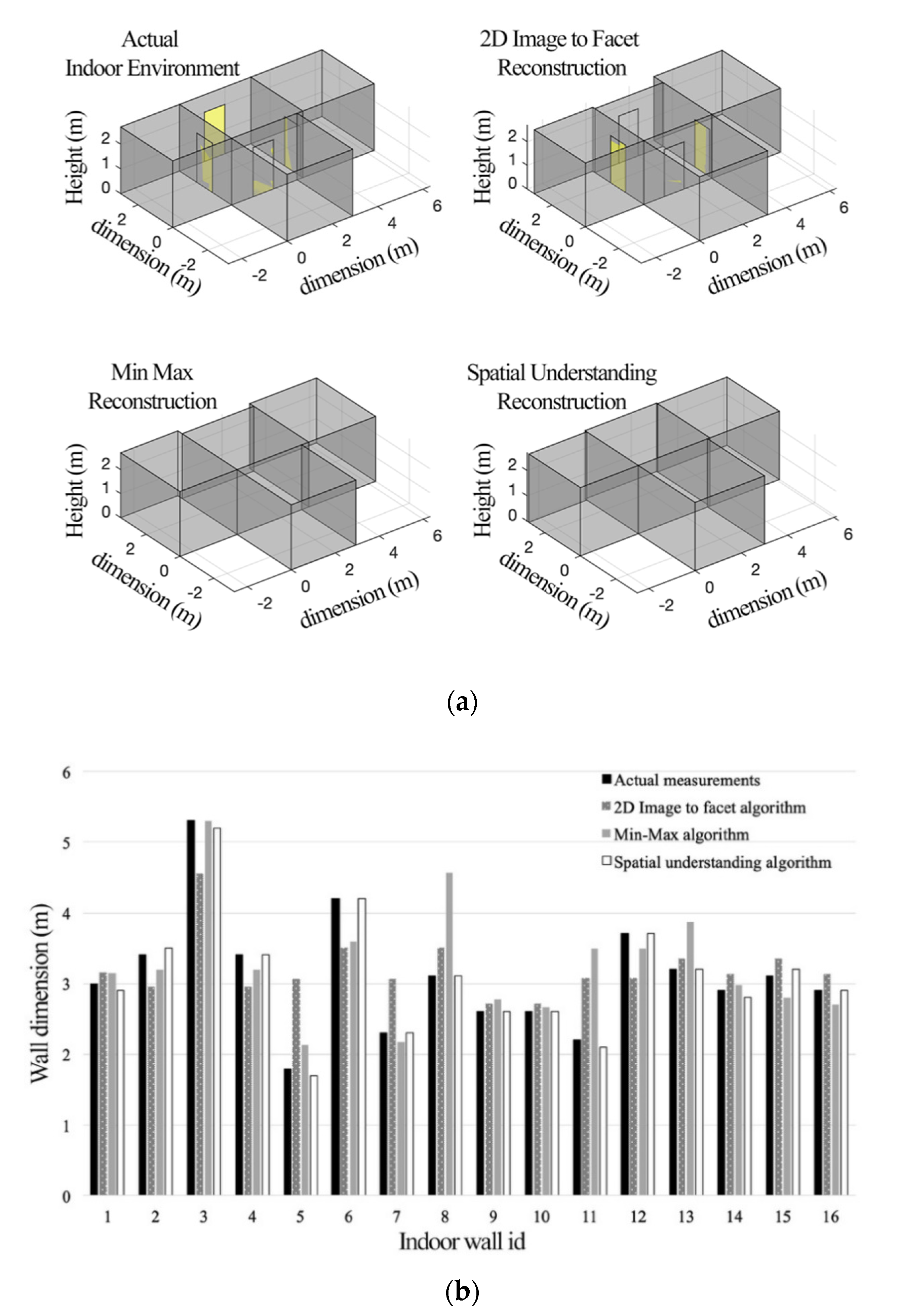
6.1. Comparison of Indoor Reconstruction
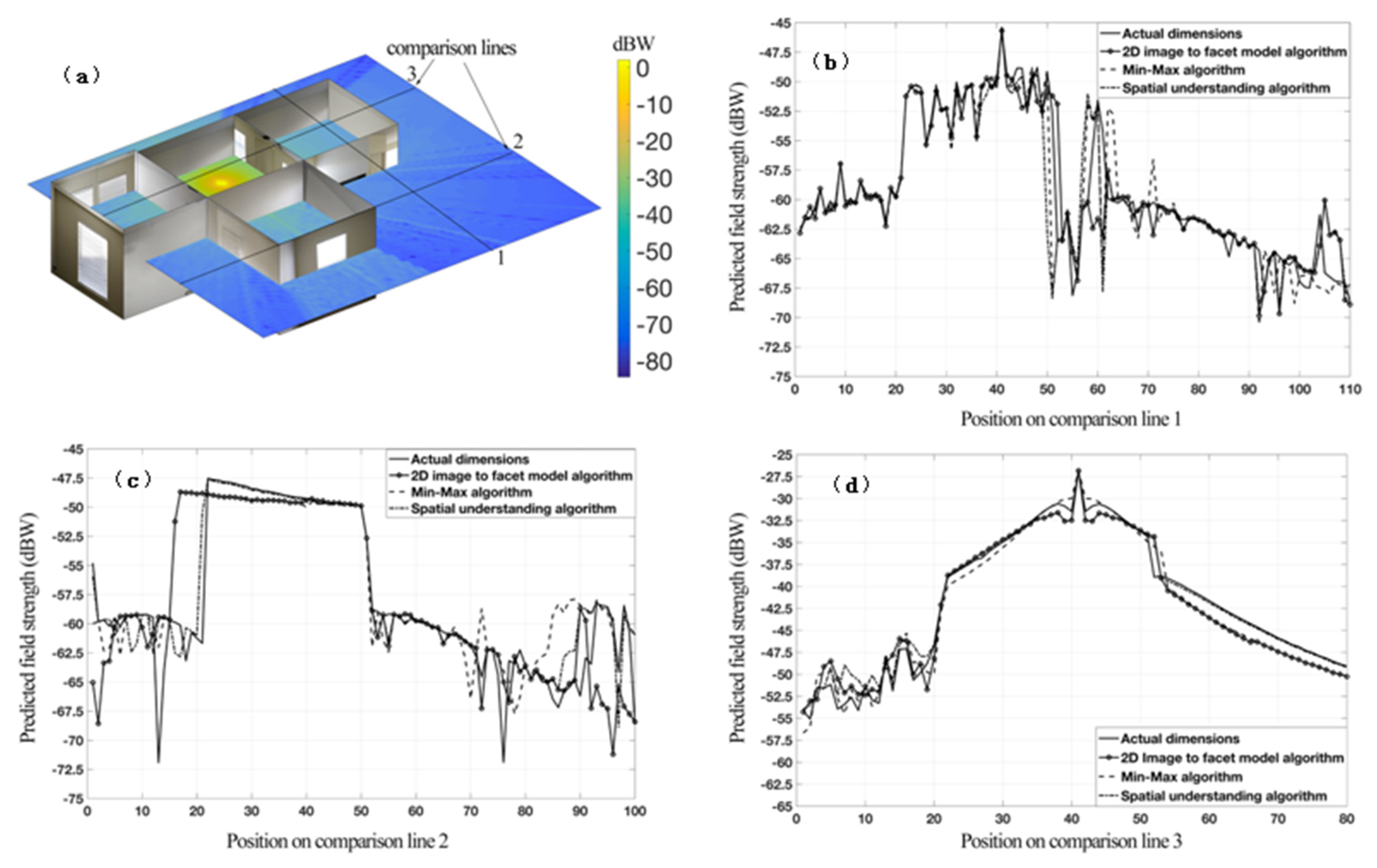
6.2. Comparison of Field Predictions
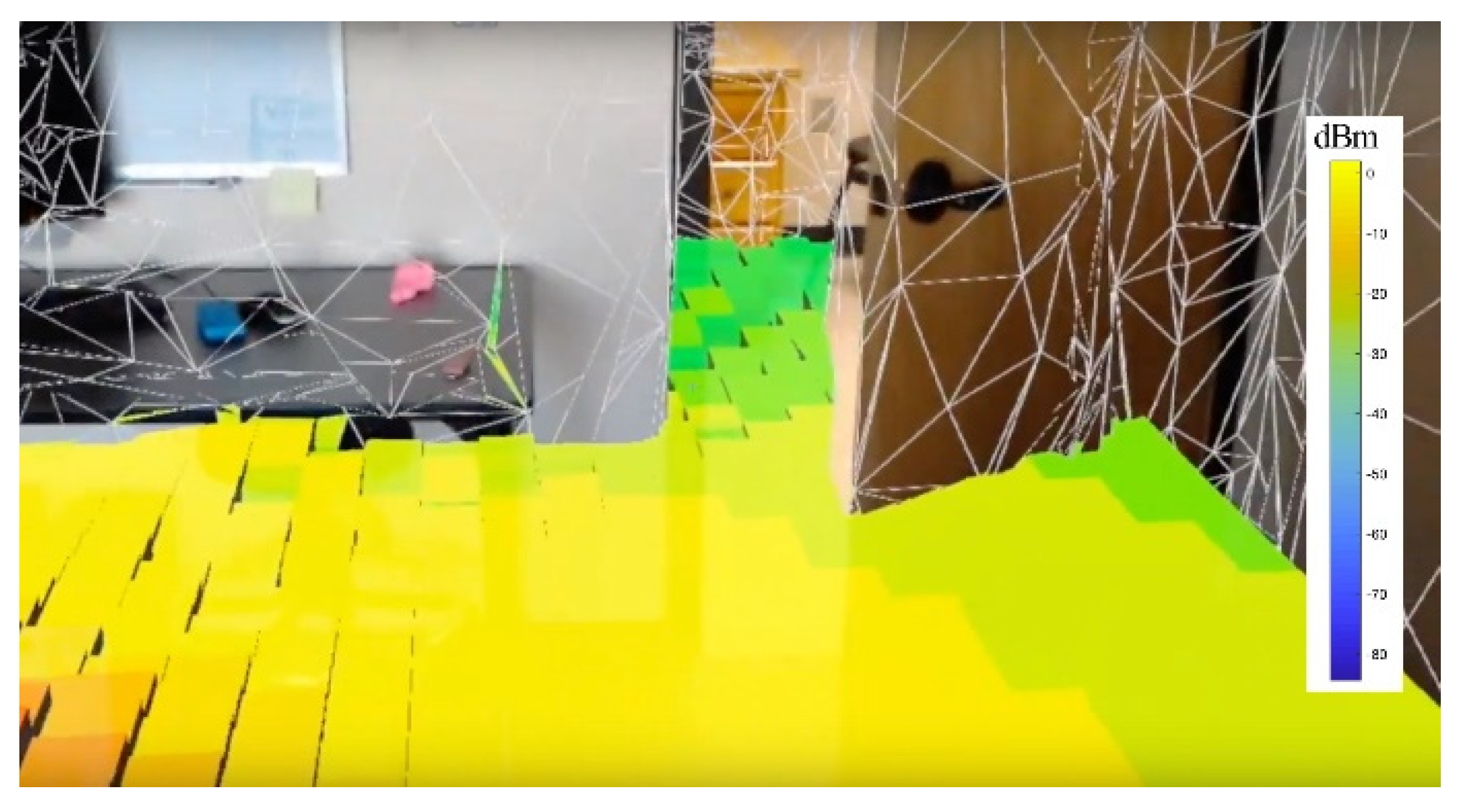
6.3. Real-Time Network Visualization
6.4. Complexity Analysis
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rappaport, T.S.; Xing, Y.; MacCartney, G.R.; Molisch, A.F.; Mellios, E.; Zhang, J. Overview of millimeter wave communications for fifth-generation (5G) wireless networks—With a focus on propagation models. IEEE Trans. Antennas Propag. 2017, 65, 6213–6230. [Google Scholar] [CrossRef]
- Koutitas, G.; Samaras, T. Exposure minimization in indoor wireless networks. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 199–202. [Google Scholar] [CrossRef]
- Wallace, J.W.; Ahmad, W.; Yang, Y.; Mehmood, R.; Jensen, M.A. A comparison of indoor MIMO measurements and ray-tracing at 24 and 2.55 GHz. IEEE Trans. Antennas Propag. 2017, 65, 6656–6668. [Google Scholar] [CrossRef]
- Ling, H. Augmented reality in reality. IEEE Multimed. 2017, 24, 10–15. [Google Scholar] [CrossRef]
- Microsoft Research. Spatial Mapping. Available online: https://docs.microsoft.com/en-us/windows/mixed-reality/spatial-mapping (accessed on 25 January 2020).
- Bring mobile data to life with SeeSignal from BadVR. Available online: https://www.magicleap.com/news/partner-stories/bring-mobile-data-to-life-with-seesignal-from-badvr (accessed on 25 January 2020).
- Liu, Y.; Dong, H.; Zhang, L.; El Saddik, A. Technical evaluation of hololens for multimedia: A first look. IEEE Multimed. 2018, 25, 8–18. [Google Scholar] [CrossRef]
- Gupta, T.; Li, H. Indoor mapping for smart cities—An affordable approach: Using kinect sensor and ZED stereo camera. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar] [CrossRef]
- Hsiao, A.Y.; Yang, C.F.; Wang, T.S.; Lin, I.; Liao, W.-J. Ray tracing simulations for millimeter wave propagation in 5G wireless communications. In Proceedings of the IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting 2017, San Diego, CA, USA, 9–14 July 2017. [Google Scholar] [CrossRef]
- Choi, S.; Zhou, Q.; Koltun, V. Robust reconstruction of indoor scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015. [Google Scholar] [CrossRef]
- Pintore, G.; Ganovelli, F.; Gobbetti, E.; Scopigno, R. Mobile reconstruction and exploration of indoor structures exploiting omnidirectional images. In Proceedings of the ACM SIGGRAPH Mobile Graphics and Interactive Applications, Macau, China, 5–8 December 2016. [Google Scholar] [CrossRef]
- Corcoran, T.; Zamora-Resendiz, R.; Liu, X.; Crivelli, S. A spatial mapping algorithm with applications in deep learning-based structure classification. arXiv 2018, arXiv:1802.02532. [Google Scholar]
- Kumar, V.; Koutitas, G. An augmented reality facet mapping technique for ray tracing applications. In Proceedings of the 13th International Conference on Digital Telecommunications (ICDT), Athens, Greece, 22–26 April 2018. [Google Scholar]
- Shi, J.; Tomasi, C. Good features to track. In Proceedings of the 1994 IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar] [CrossRef]
- Richard, D.; Hart, P.E. Use of the Hough transformation to detect lines and curves in pictures. Mag. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Ayadi, M.; Zineb, A. Body shadowing and furniture effects for accuracy improvement of indoor wave propagation models. IEEE Trans. Wirel. Commun. 2014, 13, 5999–6006. [Google Scholar] [CrossRef]
- Saunders, S. Antennas and Propagation for Wireless Communication Systems; John Wiley & Sons: Hoboken, NJ, USA, 2007; ISBN 978-0470848791. [Google Scholar]
- Thanh, N.; Kim, K.; Hong, S.; Lam, T. Entropy correlation and its impacts on data aggregation in a wireless sensor network. Sensors 2018, 18, 3118. [Google Scholar] [CrossRef] [PubMed]
- Koutitas, G.; Karousos, A.; Tassiulas, L. Deployment strategies and energy efficiency of cellular networks. IEEE Trans. Wirel. Commun. 2012, 7, 2552–2563. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | εr (F/m) | σ (S/m) | Thickness (cm) |
|---|---|---|---|
| Brick Wall | 4.4 | 18 × 10−3 | 15 |
| Wood door | 1.9 | 8 × 10−3 | 5 |
| Window | 5.2 | 3.5 × 10−3 | 1 |
| Algorithm | Accuracy |
|---|---|
| Image to facet algorithm | 93% |
| Min-Max algorithm | 95.6% |
| Spatial understanding SDK | 96.6% |
| Algorithm | Correlation (r) | |
|---|---|---|
| Comparison Line 1 | Image to facet algorithm | 0.9084 |
| Min-Max algorithm | 0.9403 | |
| Spatial understanding SDK | 0.9308 | |
| Comparison Line 2 | Image to facet algorithm | 0.8595 |
| Min-Max algorithm | 0.8581 | |
| Spatial understanding SDK | 0.9877 | |
| Comparison Line 3 | Image to facet algorithm | 0.9885 |
| Min-Max algorithm | 0.9897 | |
| Spatial understanding SDK | 0.9977 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koutitas, G.; Kumar Siddaraju, V.; Metsis, V. In Situ Wireless Channel Visualization Using Augmented Reality and Ray Tracing. Sensors 2020, 20, 690. https://doi.org/10.3390/s20030690
Koutitas G, Kumar Siddaraju V, Metsis V. In Situ Wireless Channel Visualization Using Augmented Reality and Ray Tracing. Sensors. 2020; 20(3):690. https://doi.org/10.3390/s20030690
Chicago/Turabian StyleKoutitas, George, Varun Kumar Siddaraju, and Vangelis Metsis. 2020. "In Situ Wireless Channel Visualization Using Augmented Reality and Ray Tracing" Sensors 20, no. 3: 690. https://doi.org/10.3390/s20030690
APA StyleKoutitas, G., Kumar Siddaraju, V., & Metsis, V. (2020). In Situ Wireless Channel Visualization Using Augmented Reality and Ray Tracing. Sensors, 20(3), 690. https://doi.org/10.3390/s20030690