A Weigh-in-Motion Characterization Algorithm for Smart Pavements Based on Conductive Cementitious Materials


 ,
,  , and
, and 
Abstract
1. Introduction
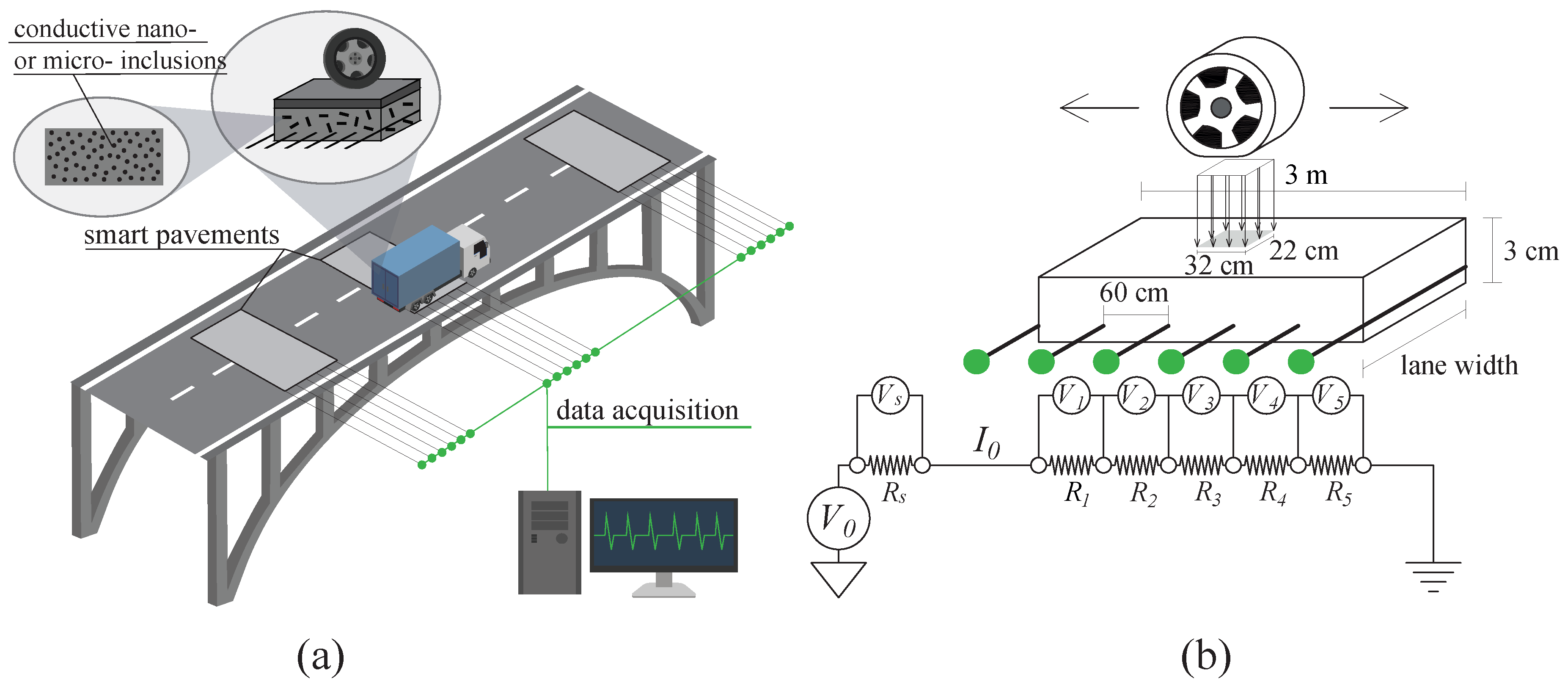
2. Smart Pavement-Based Weigh-In-Motion System
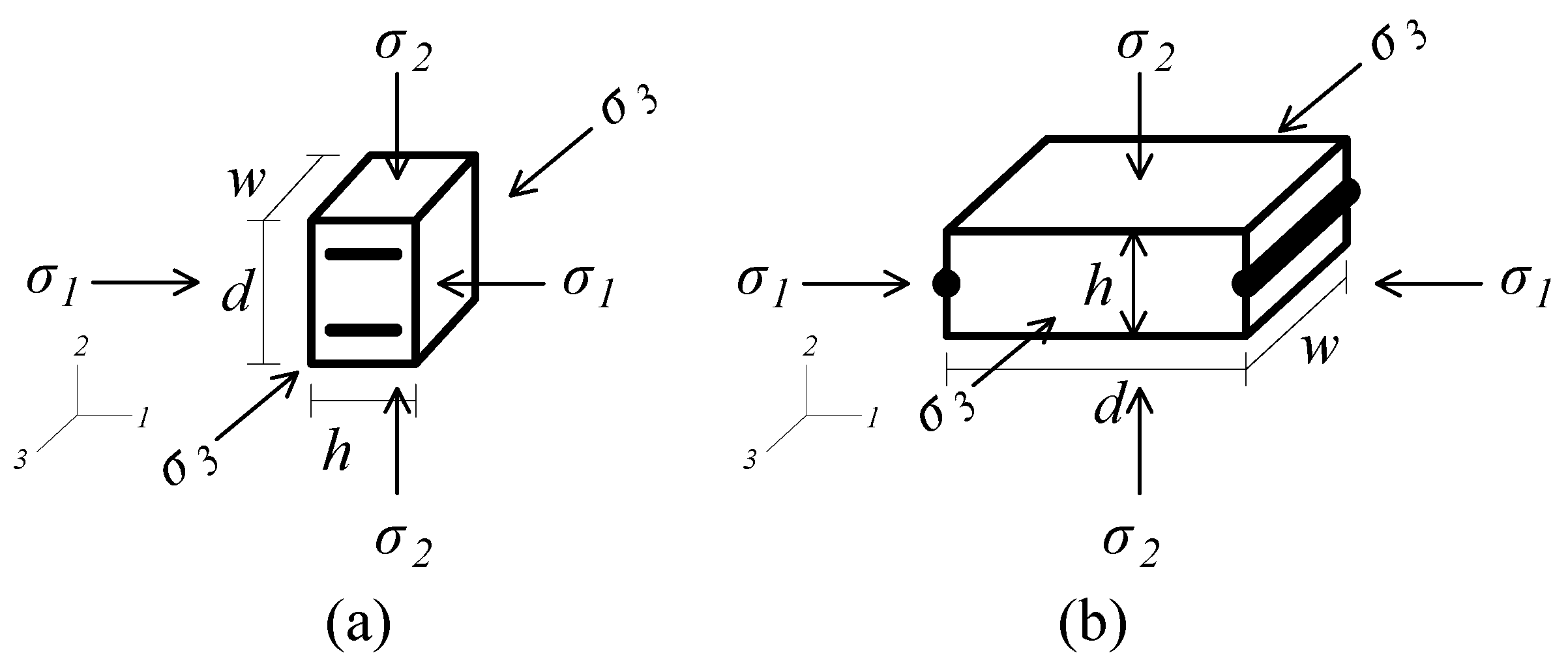
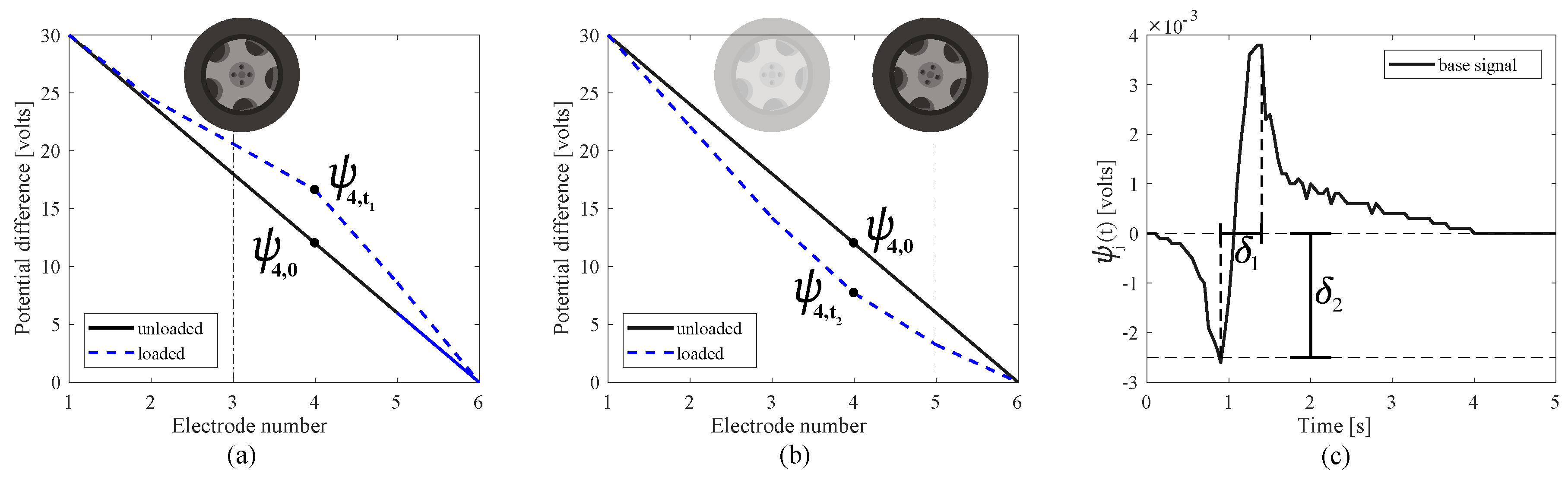
Measurement Principle
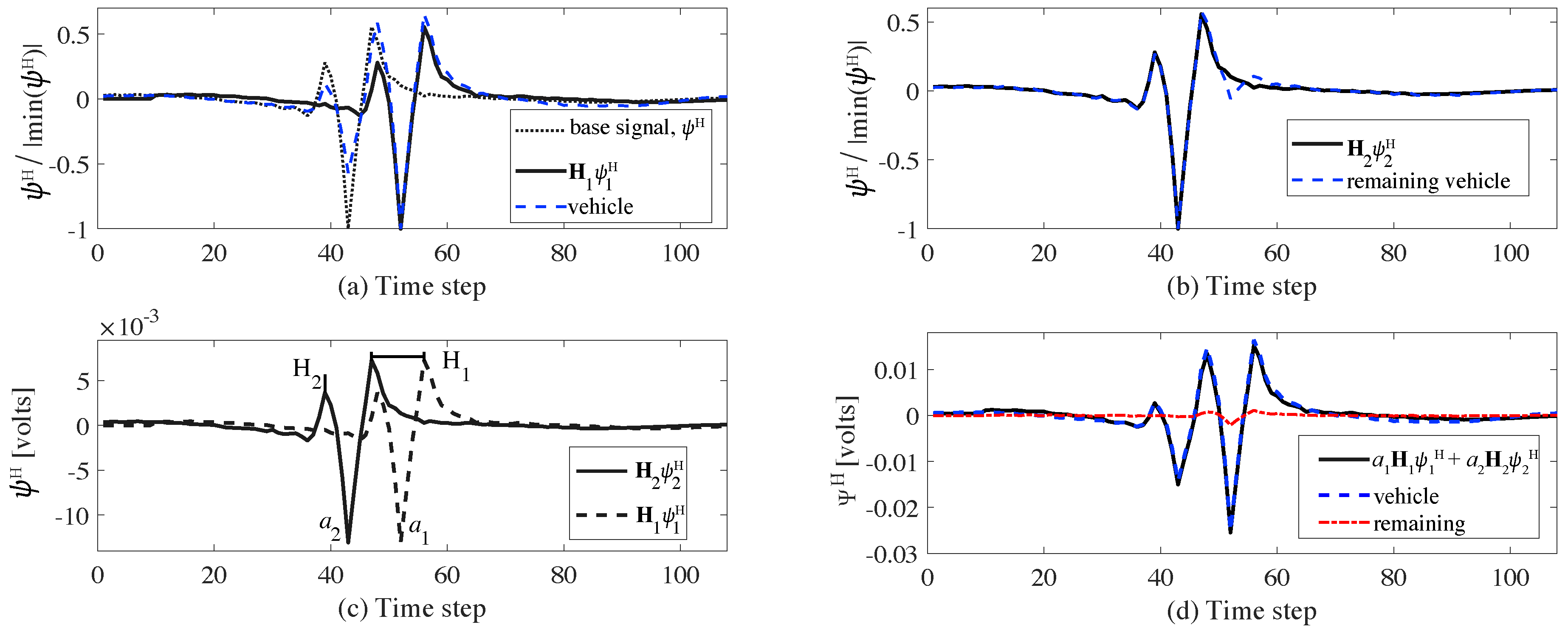
3. Algorithm for WIM Characterization
- Identification of weights, time shifts, and number of axles from the signal collected in the initial pavement section by minimizing Equation (10);
- Reconstruction of the signal (Equation (9)) from the initial pavement section;
- Temporal identification of vehicle through the computation of correlation between the reconstructed signal and the measured signal from the subsequent pavement sections; and
- Determination of vehicle speed through the averaging of temporal identification data.
4. Numerical Simulations
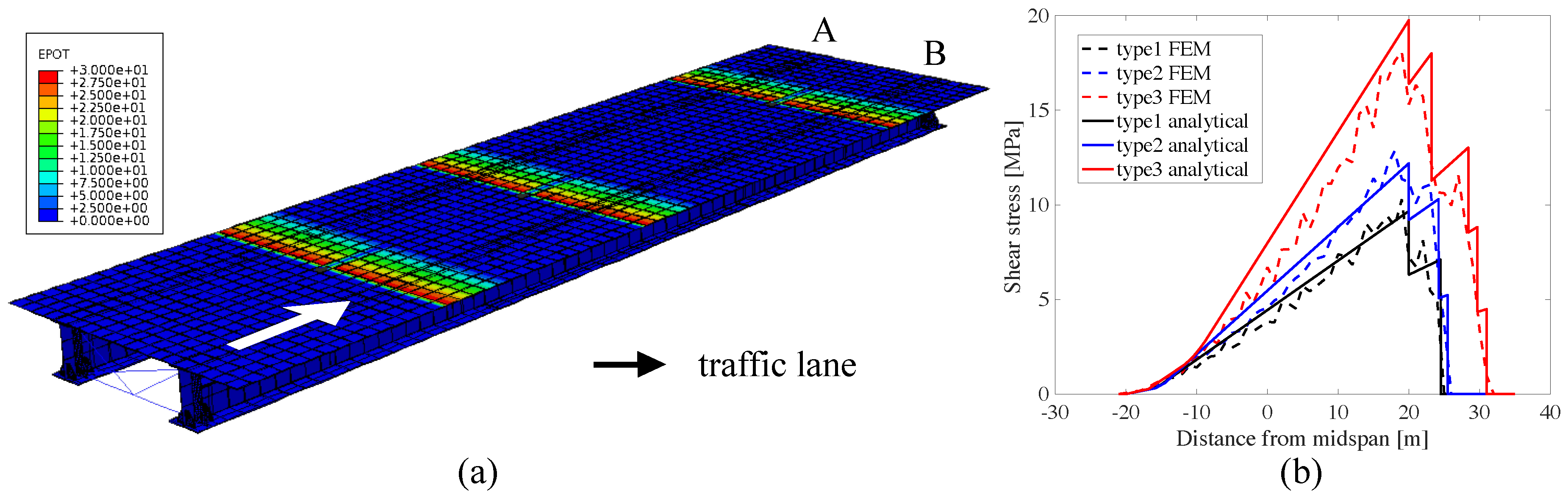
4.1. Numerical Model
4.2. Results and Discussion
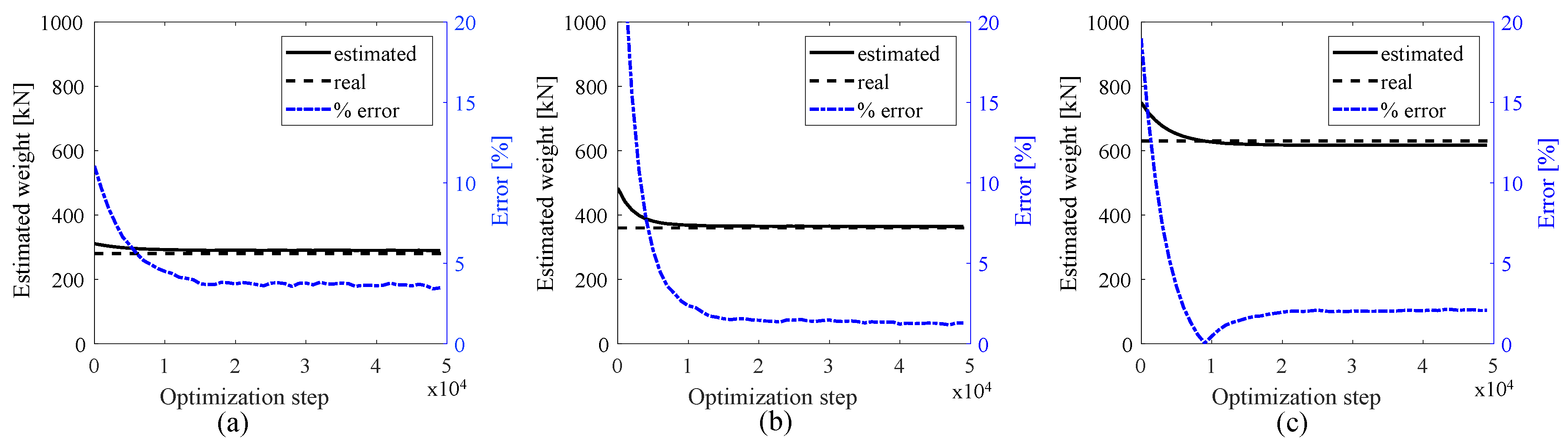
4.2.1. Results of WIM
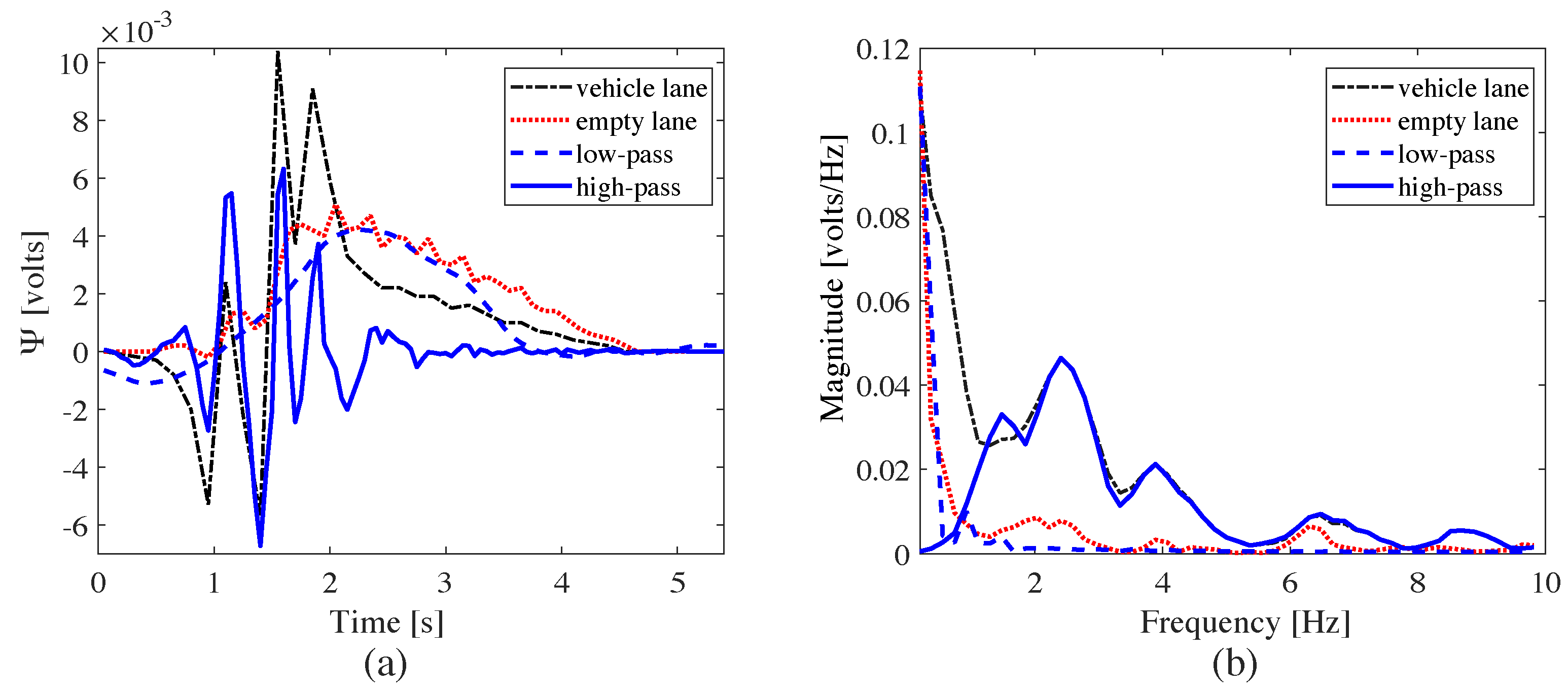
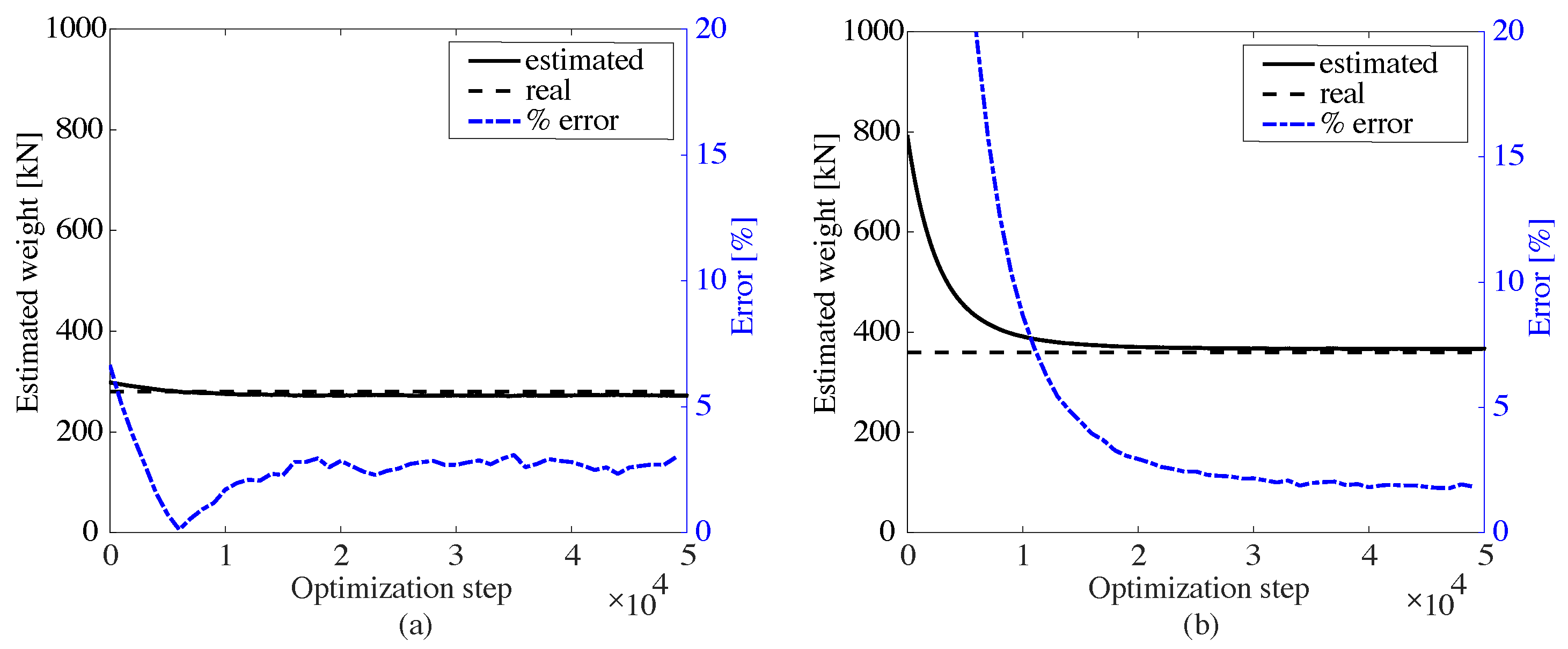
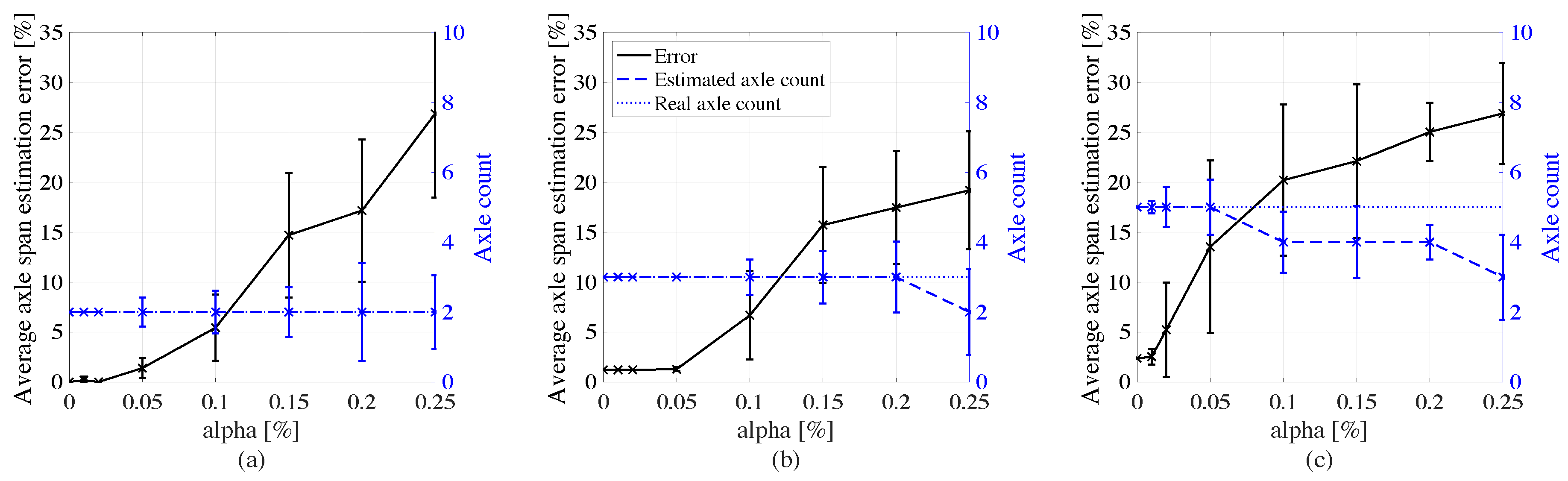
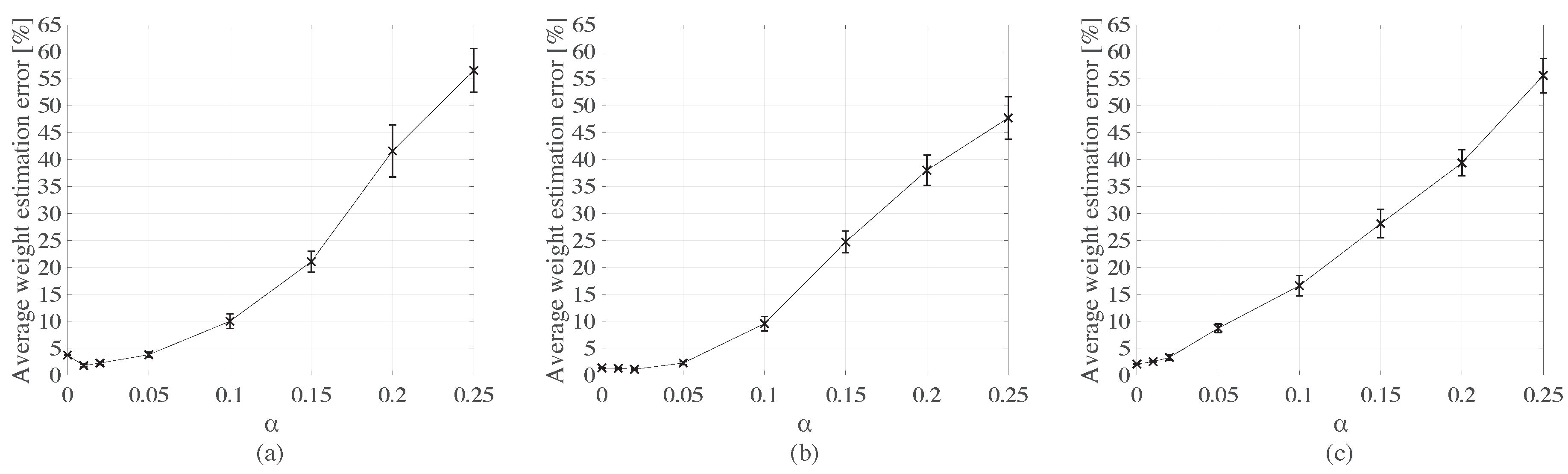
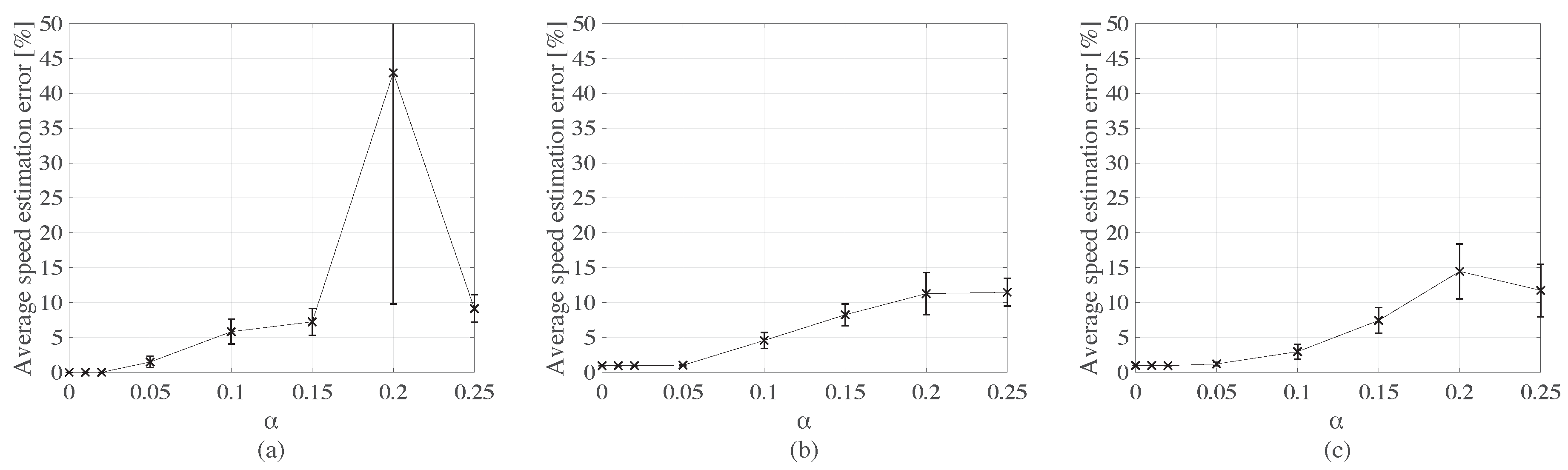
4.2.2. Noise Study
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jacob, B.; de La Beaumelle, V.F. Improving truck safety: Potential of weigh-in-motion technology. IATSS Res. 2010, 34, 9–15. [Google Scholar] [CrossRef]
- Guo, T.; Frangopol, D.M.; Chen, Y. Fatigue reliability assessment of steel bridge details integrating weigh-in-motion data and probabilistic finite element analysis. Comput. Struct. 2012, 112, 245–257. [Google Scholar] [CrossRef]
- Li, Z.; Chan, T.; Ko, J. Fatigue analysis and life prediction of bridges with structural health monitoring data— Part I: Methodology and strategy. Int. J. Fatigue 2001, 23, 45–53. [Google Scholar] [CrossRef]
- Rys, D.; Judycki, J.; Jaskula, P. Analysis of effect of overloaded vehicles on fatigue life of flexible pavements based on weigh in motion (WIM) data. Int. J. Pavement Eng. 2016, 17, 716–726. [Google Scholar] [CrossRef]
- Zhou, H.; Liu, K.; Shi, G.; Wang, Y.; Shi, Y.; Roeck, G.D. Fatigue assessment of a composite railway bridge for high speed trains. Part I: Modeling and fatigue critical details. J. Constr. Steel Res. 2013, 82, 234–245. [Google Scholar] [CrossRef]
- Klein, L.A. Sensor Technologies and Data Requirements for ITS; Artech House Publishers: Norwood, MA, USA, 2001. [Google Scholar]
- Burnos, P.; Gajda, J. Thermal property analysis of axle load sensors for weighing vehicles in weigh-in-motion system. Sensors 2016, 16, 2143. [Google Scholar] [CrossRef]
- Zhao, H.; Uddin, N. Algorithm to identify axle weights for an innovative BWIM system. Part II. In Proceedings of the IABSE-JSCE Joint Conf. on Advances in Bridge Engineering-II, Bangladesh Association of Consulting Engineers and Bangladesh Association of Construction Industry, Dhaka, Bangladesh, 8–10 August 2010; Volume 537, p. 546. [Google Scholar]
- Xue, W.J.; Wang, D.; Wang, L.B. A review and perspective about pavement monitoring. Int. J. Pavement Res. Technol. 2012, 5, 295–302. [Google Scholar]
- Altawim, M.; Alahmadi, A.; Bonais, M.; Soh, B.; Algarni, F. Radar Vehicle Detector Mote. Int. J. Enhanc. Res. Sci. Technol. 2013, 2–3, MARCH-2013. [Google Scholar]
- Qin, T.; Lin, M.; Cao, M.; Fu, K.; Ding, R. Effects of Sensor Location on Dynamic Load Estimation in Weigh-in-Motion System. Sensors 2018, 18, 3044. [Google Scholar] [CrossRef]
- Yu, Y.; Cai, C.; Deng, L. State-of-the-art review on bridge weigh-in-motion technology. Adv. Struct. Eng. 2016, 19, 1514–1530. [Google Scholar] [CrossRef]
- Richardson, J.; Jones, S.; Brown, A.; O’Brien, E.J.; Hajializadeh, D. On the use of bridge weigh-in-motion for overweight truck enforcement. Int. J. Heavy Veh. Syst. 2014, 21, 83–104. [Google Scholar] [CrossRef]
- Moses, F. Weigh-in-motion system using instrumented bridges. J. Transp. Eng. 1979, 105, 222–235. [Google Scholar]
- Rowley, C.; Gonzalez, A.; O’Brien, E.; Znidaric, A. Comparison of conventional and regularized bridge weigh-in-motion algorithms. In Proceedings of the International Conference on Heavy Vehicles, Paris, France, 19–22 May 2008; pp. 19–22. [Google Scholar]
- Leming, S.K.; Stalford, H.L. Bridge weigh-in-motion system development using superposition of dynamic truck/static bridge interaction. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 1, pp. 815–820. [Google Scholar]
- McCrum, D.; O’Brien, E.; Khan, M. Bridge Health Monitoring Using an Acceleration-Based Bridge Weigh-in-Motion System. Key Eng. Mater. 2013, 569, 183–190. [Google Scholar]
- O’Brien, E.; Žnidarič, A.; Ojio, T. Bridge weigh-in-motion – latest developments and applications world wide. In International Conference on Heavy Vehicles HVParis 2008; John Wiley and Sons: Hoboken, NJ, USA, 2013; pp. 39–56. [Google Scholar]
- Law, S.; Zhu, X. Study on different beam models in moving force identification. J. Sound Vib. 2000, 234, 661–679. [Google Scholar] [CrossRef]
- Ojio, T.; H Carey, C.; O’Brien, E.; Doherty, C.; Taylor, S. Contactless Bridge Weigh-in-Motion. J. Bridge Eng. 2015, 21, 04016032. [Google Scholar] [CrossRef]
- Otto, G.G.; Simonin, J.M.; Piau, J.M.; Cottineau, L.M.; Chupin, O.; Momm, L.; Valente, A.M. Weigh-in-motion (WIM) sensor response model using pavement stress and deflection. Constr. Build. Mater. 2017, 156, 83–90. [Google Scholar] [CrossRef]
- Chen, S.Z.; Wu, G.; Feng, D.C.; Zhang, L. Development of a bridge weigh-in-motion system based on long-gauge fiber Bragg grating sensors. J. Bridge Eng. 2018, 23, 04018063. [Google Scholar] [CrossRef]
- Bernardo, F.; De Fazio, P.; Grandizio, F.; Grieco, M.; Montesano, G. Monitoring of the mechanical behavior of a composite material with high performance by fbg sensors. In Proceedings of the 17th European Conference on Composite Materials, Germany, Munich, 1 January 2016. [Google Scholar]
- Mimbela, L.E.Y.; Pate, J.; Copeland, S.; Kent, P.M.; Hamrick, J. Applications of Fiber Optics Sensors in Weigh-in-Motion (WIM) Systems for Monitoring Truck Weights on Pavements and Structures; Technical Report; New Mexico Department of Transportation: Albuquerque, NM, USA, 2003.
- Liu, C.; Guo, L.; Li, J.; Chen, X. Weigh-in-motion (WIM) sensor based on EM resonant measurements. In Proceedings of the IEEE Antennas and Propagation Society International Symposium, Honolulu, HI, USA, 9–15 June 2007; pp. 561–564. [Google Scholar]
- Laflamme, S.; Eisenmann, D.; Wang, K.; Ubertini, F.; Pinto, I.; DeMoss, A. Smart Concrete for Enhanced Nondestructive Evaluation. Mater. Eval. 2018, 76, 1395–1404. [Google Scholar]
- D’Alessandro, A.; Ubertini, F.; Laflamme, S.; Materazzi, A. Towards smart concrete for smart cities: Recent results and future application of strain-sensing nanocomposites. J. Smart Cities 2015, 1, 1–12. [Google Scholar] [CrossRef]
- Rajaram, M.L.; Kougianos, E.; Mohanty, S.P.; Sundaravadivel, P. A wireless sensor network simulation framework for structural health monitoring in smart cities. In Proceedings of the IEEE 6th International Conference on Consumer Electronics - Berlin (ICCE-Berlin), Berlin, Germany, 5–7 September 2016; pp. 78–82. [Google Scholar]
- Du, H.; Quek, S.T.; Pang, S.D. Smart multifunctional cement mortar containing graphite nanoplatelet. Proc. SPIE 2013, 8692, 869238. [Google Scholar]
- Li, H.; Xiao, H.; Ou, J. Effect of compressive strain on electrical resistivity of carbon black-filled cement-based composites. Cem. Concr. Compos. 2006, 28, 824–828. [Google Scholar] [CrossRef]
- Han, B.; Yu, X.; Kwon, E.; Ou, J. Piezoresistive Multi-Walled Carbon Nanotubes Filled Cement-Based Composites. Sens. Lett. 2010, 8, 344–348. [Google Scholar] [CrossRef]
- Yu, X.; Kwon, E. Carbon-nanotube/cement composite with piezoresistive property. Smart Mater. Struct. 2009, 18, 055010. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Ubertini, F.; Laflamme, S.; Rallini, M.; Materazzi, A.L.; Kenny, J.M. Strain sensitivity of carbon nanotube cement-based composites for structural health monitoring. Proc. SPIE 2016, 9803. [Google Scholar]
- Meoni, A.; D’Alessandro, A.; Downey, A.; García-Macías, E.; Rallini, M.; Materazzi, A.; Torre, L.; Laflamme, S.; Castro-Triguero, R.; Ubertini, F. An Experimental Study on Static and Dynamic Strain Sensitivity of Embeddable Smart Concrete Sensors Doped with Carbon Nanotubes for SHM of Large Structures. Sensors 2018, 18, 831. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Ubertini, F.; García-Macías, E.; Castro-Triguero, R.; Downey, A.; Laflamme, S.; Meoni, A.; Materazzi, A. Static and Dynamic Strain Monitoring of Reinforced Concrete Components through Embedded Carbon Nanotube Cement-Based Sensors. Shock Vib. 2017, 2017, 1–11. [Google Scholar] [CrossRef]
- Bonner, J.C. Carbon nanotubes as delivery systems for respiratory disease: Do the dangers outweigh the potential benefits? Expert Rev. Respir. Med. 2011, 5, 779–787. [Google Scholar] [CrossRef]
- Han, B.; Zhang, L.; Sun, S.; Yu, X.; Dong, X.; Wu, T.; Ou, J. Electrostatic self-assembled carbon nanotube/nano carbon black composite fillers reinforced cement-based materials with multifunctionality. Compos. Part A Appl. Sci. Manuf. 2015, 79, 103–115. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Rallini, M.; Ubertini, F.; Materazzi, A.; Kenny, J.; Laflamme, S. A comparative study between carbon nanotubes and carbon nanofibers as nanoinclusions in self-sensing concrete. In Proceedings of the IEEE 15th International Conference on Nanotechnology (IEEE-NANO), Rome, Italy, 27–30 July 2015; pp. 698–701. [Google Scholar]
- Fan, X.; Fang, D.; Sun, M.; Li, Z. Piezoresistivity of carbon fiber graphite cement-based composites with CCCW. J. Wuhan Univ. Technol.-Mater. Sci. Ed. 2011, 26, 339. [Google Scholar] [CrossRef]
- Lechner, B.; Lieschnegg, M.; Mariani, O.; Pircher, M.; Fuchs, A. A wavelet-based bridge weigh-in-motion system. Int. J. Smart Sens. Intell. Syst. 2010, 3. [Google Scholar] [CrossRef]
- Chatterjee, P.; O’Brien, E.; Li, Y.; González, A. Wavelet domain analysis for identification of vehicle axles from bridge measurements. Comput. Struct. 2006, 84, 1792–1801. [Google Scholar] [CrossRef]
- González, A.; Papagiannakis, A.T.; O’Brien, E.J. Evaluation of an artificial neural network technique applied to multiple-sensor weigh-in-motion systems. Transp. Res. Rec. 2003, 1855, 151–159. [Google Scholar] [CrossRef]
- Zhaojing, T.; Xiuhua, S.; Qunpo, L.; Dahu, W. Weigh-in-motion based on multi-sensor and RBF neural network. In Proceedings of the International Conference on Electric Information and Control Engineering, Wuhan, China, 15–17 April 2011; pp. 944–947. [Google Scholar]
- Flood, I. Developments in Weigh-in-Motion Using Neural Nets. Comput. Civ. Build. Eng. 2000, 2, 1133–1140. [Google Scholar]
- Yan, L.; Fraser, M.; Elgamal, A.W.; Fountain, T.; Oliver, K. Neural Networks and Principal Components Analysis for Strain-Based Vehicle Classification. J. Comput. Civ. Eng. 2008, 22. [Google Scholar] [CrossRef]
- Jeng, S.T.C.; Ritchie, S.G. Real-Time Vehicle Classification Using Inductive Loop Signature Data. Transp. Res. Rec. 2008, 2086, 8–22. [Google Scholar] [CrossRef]
- Meta, S.; Cinsdikici, M.G. Vehicle-Classification Algorithm Based on Component Analysis for Single-Loop Inductive Detector. IEEE Trans. Veh. Technol. 2010, 59, 2795–2805. [Google Scholar] [CrossRef]
- Liu, H.; Tok, Y.C.A.; Ritchie, S.G. Development of a real-time on-road emissions estimation and monitoring system. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1821–1826. [Google Scholar] [CrossRef]
- Hernandez, S.V.; Tok, A.; Ritchie, S.G. Integration of Weigh-in-Motion (WIM) and inductive signature data for truck body classification. Transp. Res. Part C Emerg. Technol. 2016, 68, 1–21. [Google Scholar] [CrossRef]
- European Committee for Standardisation. EN 1991-2: Eurocode 1: Actions on Structures - Part 2: Traffic Loads on Bridges; European Committee for Standardisation: Brussels, Belgium, 2003. [Google Scholar]
- Pisello, A.L.; D’Alessandro, A.; Sambuco, S.; Rallini, M.; Ubertini, F.; Asdrubali, F.; Materazzi, A.L.; Cotana, F. Multipurpose experimental characterization of smart nanocomposite cement-based materials for thermal-energy efficiency and strain-sensing capability. Sol. Energy Mater. Sol. Cells 2017, 161, 77–88. [Google Scholar] [CrossRef]
- Ariyur, K.; Krstic, M. Real-Time Optimization by Extremum-Seeking Control; Wiley-Interscience Publication: Hoboken, NJ, USA, 2003. [Google Scholar]
- Smith, M. ABAQUS/Standard User’s Manual, Version 6.9; Dassault Systèmes Simulia Corp: Providence, RI, USA, 2009. [Google Scholar]
- García-Macías, E.; Castro-Triguero, R.; Sáez, A.; Ubertini, F. 3D mixed micromechanics-FEM modeling of piezoresistive carbon nanotube smart concrete. Comput. Methods Appl. Mech. Eng. 2018, 340, 396–423. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type 1 | Type 2 | Type 3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.00 | 0.91 | 0.48 | 1.00 | 0.95 | 0.53 | 1.00 | 0.97 | 0.35 | |||
| 0.74 | 1.00 | 0.63 | 0.73 | 1.00 | 0.70 | 0.69 | 1.00 | 0.70 | |||
| 0.43 | 0.54 | 1.00 | 0.66 | 0.57 | 1.00 | 0.25 | 0.44 | 1.00 |
| Simulation Input | Simulation Output | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Eurocode | simulation case 1 | simulation case 2 | ||||||||
| axle sp | axle w | axle sp | err | axle w | err | axle sp | err | axle w | err | |
| (m) | (kN) | (m) | (%) | (kN) | (%) | (m) | (%) | (kN) | (%) | |
| type 1 | 4.5 | 90 | 4.5 | 0 | 90 | 0 | 4.5 | 0 | 81 | 10 |
| 190 | 196 | 3 | 177 | 7 | ||||||
| type 2 | 4.2 | 80 | 4 | 4 | 77 | 4 | 4.5 | 7 | 93 | 16 |
| 1.3 | 140 | 1.5 | 15 | 125 | 10 | 1 | 23 | 162 | 15 | |
| 140 | 155 | 10 | 115 | 17 | ||||||
| type 3 | 3.2 | 90 | 3 | 6 | 91 | 1 | ||||
| 5.2 | 180 | 5.5 | 6 | 171 | 5 | |||||
| 1.3 | 120 | 2 | 53 | 148 | 23 | |||||
| 1.3 | 120 | 1.5 | 15 | 158 | 32 | |||||
| 120 | 46 | 62 | ||||||||
| 1.00 | 0.91 | 0.48 | 1.00 | 0.96 | 0.46 | 0.73 | 1.00 | 0.91 | ||
| Type 1 | 0.72 | 1.00 | 0.66 | 0.73 | 1.00 | 0.48 | 1.00 | 0.75 | 0.65 | |
| 0.42 | 0.50 | 1.00 | 0.31 | 0.47 | 1.00 | 0.40 | 0.47 | 1.00 | ||
| 1.00 | 0.95 | 0.53 | 1.00 | 0.99 | 0.53 | 1.00 | 0.90 | 0.44 | ||
| Type 2 | 0.73 | 1.00 | 0.70 | 0.75 | 1.00 | 0.68 | 0.80 | 1.00 | 0.94 | |
| 0.66 | 0.57 | 1.00 | 0.57 | 0.60 | 1.00 | 0.49 | 0.61 | 1.00 | ||
| 1.00 | 0.97 | 0.35 | 1.00 | 0.98 | 0.43 | 1.00 | 0.78 | 0.12 | ||
| Type 3 | 0.69 | 1.00 | 0.70 | 0.78 | 1.00 | 0.64 | 0.86 | 1.00 | 0.26 | |
| 0.25 | 0.44 | 1.00 | 0.19 | 0.42 | 1.00 | 0.31 | 0.28 | 1.00 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Birgin, H.B.; Laflamme, S.; D’Alessandro, A.; Garcia-Macias, E.; Ubertini, F. A Weigh-in-Motion Characterization Algorithm for Smart Pavements Based on Conductive Cementitious Materials. Sensors 2020, 20, 659. https://doi.org/10.3390/s20030659
Birgin HB, Laflamme S, D’Alessandro A, Garcia-Macias E, Ubertini F. A Weigh-in-Motion Characterization Algorithm for Smart Pavements Based on Conductive Cementitious Materials. Sensors. 2020; 20(3):659. https://doi.org/10.3390/s20030659
Chicago/Turabian StyleBirgin, Hasan Borke, Simon Laflamme, Antonella D’Alessandro, Enrique Garcia-Macias, and Filippo Ubertini. 2020. "A Weigh-in-Motion Characterization Algorithm for Smart Pavements Based on Conductive Cementitious Materials" Sensors 20, no. 3: 659. https://doi.org/10.3390/s20030659
APA StyleBirgin, H. B., Laflamme, S., D’Alessandro, A., Garcia-Macias, E., & Ubertini, F. (2020). A Weigh-in-Motion Characterization Algorithm for Smart Pavements Based on Conductive Cementitious Materials. Sensors, 20(3), 659. https://doi.org/10.3390/s20030659